Lecture 2 Image Processing and Filtering
|
|
|
- Warren Skinner
- 6 years ago
- Views:
Transcription
1 Lecture 2 Image Processing and Filtering UW CSE vision faculty
2 What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations Range (intensity) transformations Noise reduction through spatial filtering Filtering as cross-correlation Convolution Nonlinear (median) filtering
 f(x,y) (from Gonzalez &")
3 Image Formation: Basics i(x,y) r(x,y) f(x,y) (from Gonzalez & Woods, 2008)
4 Image Formation: Basics Image f(x,y) is characterized by 2 components 1. Illumination i(x,y) = Amount of source illumination incident on scene 2. Reflectance r(x,y) = Amount of illumination reflected by objects in the scene f ( x, y) = i( x, y) r( x, y) where 0 < i( x, y) < and 0 < r( x, y) < 1 r(x,y) depends on object properties r = 0 means total absorption and 1 means total reflectance
 Black velvet: 0.01, Stainless steel: 0.65, Snow: 0.")
5 Image Formation: Basics f ( x, y) = i( x, y) r( x, y) where 0 < i( x, y) < and 0 < r( x, y) < 1 Typical values of i(x,y): Sun on a clear day: 90,000 lm/m 2 Cloudy day: 10,000 lm/m 2 Inside an office: 1000 lm/m 2 Typical values of r(x,y) Black velvet: 0.01, Stainless steel: 0.65, Snow: 0.93 Typical limits of f(x,y) in an office environment 10 < f(x,y) < 1000 Shifted to gray scale [0, L-1]; 0 = black, L-1 = 255 = white r=1
6 Sampling and Quantization Process (from Gonzalez & Woods, 2008)

7 Example of a Quantized 2D Image Continuous image projected onto sensor array Result of sampling and quantization (from Gonzalez & Woods, 2008)
8 Suppose we want to zoom an image Original image Need to fill in values for new pixels Zoomed image
9 Interpolation Original Zoomed Nearest Neighbor Interpolation **** **** ******** **** **** Need to fill in missing values * For each new pixel, copy nearest value

10 Neared Neighbor Interpolation Original image Can we do better? Zoomed image
 Bicubic interpolation: (Used in most commercial image editing")

11 Other image interpolation techniques Bilinear interpolation: Compute pixel value v(x,y) as: v ( x, y) = ax + by + cxy + a, b, c, d determined from four nearest neighbors of (x,y) Bicubic interpolation: (Used in most commercial image editing programs, e.g., Photoshop) v( x, y) = 3 i= 0 j= 0 a a ij determined from 16 nearest neighbors of (x,y) 3 ij See also x i y j d (from

12 Comparison of Interpolation Techniques Nearest Neighbor Bilinear Bicubic

 Translation Rotation How")
13 Recall from Last Time Domain transformation: (What is an example?) Translation Rotation How are these done?
14 Geometric spatial transformations of images Two steps: 1. Spatial transformation of coordinates (x,y) 2. Interpolation of intensity value at new coordinates We already know how to do (2), so focus on (1) Example: What does the transformation (x,y) = T((v,w)) = (v/2,w/2) do? [Shrinks original image in half in both directions]
15 Affine Spatial Transformations Most commonly used set of transformations General form: [ x y 1] = [ v w 1] T = [ v w 1] [x y 1] are called homogenous coordinates Can translate, rotate, scale, or shear based on values t ij Multiple transformations can be concatenated by multiplying them to form new matrix T t t t t t t
16 Example: Translation [ x y 1] = [ v w 1] T = [ v w 1] t t t t t t What does T look like for translation? x = v + t x y = w + t y
17 Affine Transformations Transformation Affine Matrix T Coordinate Equations Example
18 Affine Transformations (cont.) Transformation Affine Matrix T Coordinate Equations Example

19 Example of Affine Transformation Image rotated 21 degrees Nearest Neighbor Bilinear Bicubic (from Gonzalez & Woods, 2008)
20 Recall from last time Range transformation: (What is an example?) Noise filtering
21 Image processing for noise reduction Common types of noise: Salt and pepper noise: contains random occurrences of black and white pixels Impulse noise: contains random occurrences of white pixels Gaussian noise: variations in intensity drawn from a Gaussian normal distribution Original Impulse noise Salt and pepper noise Gaussian noise
22 How do we reduce the effects of noise?
23 How do we reduce the effects of noise?
24 How do we reduce the effects of noise? Idea: Compute mean value for each pixel from neighbors
25 Mean filtering
26 Filtering as cross-correlation If the averaging window is (2k+1)x(2k+1): In our example in previous slide, k = 1 for a 3x3 averaging window
27 Filtering as cross-correlation Can generalize this by allowing different weights for different neighboring pixels: This is called cross-correlation, denoted by: H is called the filter, kernel, or mask. Note: During implementation, we avoid the negative filter indices by using H[u+k,v+k] instead of H[u,v]
28 Kernel for mean filtering What is the kernel for a 3x3 mean filter?
29 Kernel for mean filtering What is the kernel for a 3x3 mean filter? /

30 Example of mean filtering Input image Filtered Images Salt and pepper noise 3 x 3 5 x 5 7 x 7 Kernel size



31 Gaussian Filtering A Gaussian kernel gives less weight to pixels further from the center of the window Kernel approximates Gaussian function: What happens if you increase σ?

32 Mean versus Gaussian filtering Input Image Mean filtered Gaussian filtered
33 Filtering an impulse Impulse signal Kernel a b c d e f g h i Output =?
34 Filtering an impulse Impulse signal Filter Kernel a b c d e f g h i Output is equal to filter kernel flipped horizontally & vertically 0 0 i h g f e d c b a 0 0
35 What if we want to get an output that looks exactly like the filter kernel?

36 Flipping kernels Impulse signal Filter Kernel Flipped Kernel a b c d e f g h i Output is equal to filter kernel! i h g f e d c b a 0 0 a b c d e f g h i 0 0
37 Convolution A convolution is a cross-correlation where the filter is flipped both horizontally and vertically before being applied to the image: Written as: Compare with cross-correlation: If H is a Gaussian or mean kernel, how does convolution differ from cross-correlation?
38 Why convolution? Convolution is associative (cross-corr. is not): F * (G * I) = (F * G) * I Important for efficiency: To apply two filters F and G sequentially to incoming images I, pre-compute (F * G) and perform only 1 convolution (with precomputed filter) Convolution also allows effects of filtering to be analyzed using Fourier analysis (will touch on this later)
39 Cross-correlation and template matching Cross-correlation is useful for template matching (locating a given pattern in an image) a b c d e f g h i Image Template (pattern) a b c d e f g h i Highest value yields location of pattern in image
40 Nonlinear filters: Median filter A Median Filter replaces the value of a pixel by the median of intensity values of neighbors Recall: m is the median of a set of values iff half the values in the set are <= m and half are >= m. Median filtering of image I: For each location (x,y), sort intensity values in its neighborhood, determine median intensity value, and assign that value to I(x,y) Is a median filter better than a mean filter? Is median filtering a convolution?

41 Comparison of filters (salt-and-pepper noise)
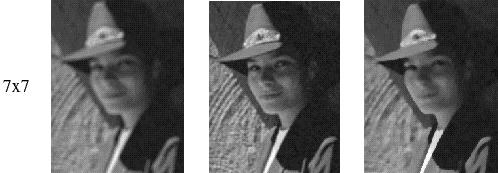
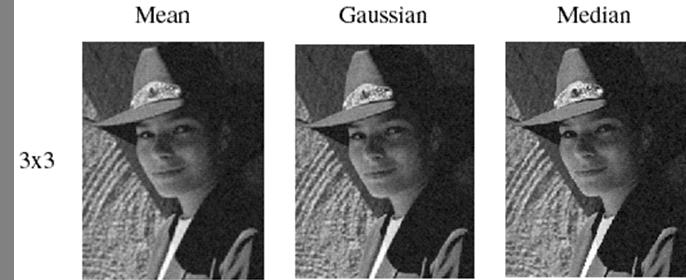
42 Comparison of filters (Gaussian noise)

43 Next Time: Edge detection Things to do: Read Chap. 5: Secs , 5.11 and online article by Cipolla & Gee on edge detection Mailing list: Did you receive the first message? Otherwise, sign up Prepare for C/C++ programming Visit Vision and Graphics Lab (Sieg 327) Your ID card should open Sieg 327 Check to make sure ASAP Have a good weekend!
CS4442/9542b Artificial Intelligence II prof. Olga Veksler
 CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 8 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 8 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
Digital Image Processing
 Digital Image Processing Lecture # 4 Digital Image Fundamentals - II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Presentation Outline
Digital Image Processing Lecture # 4 Digital Image Fundamentals - II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Presentation Outline
CS4442/9542b Artificial Intelligence II prof. Olga Veksler
 CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 2 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 2 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections.
 Image Interpolation 48 Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections. Fundamentally, interpolation is the process of using known
Image Interpolation 48 Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections. Fundamentally, interpolation is the process of using known
Lecture 4: Spatial Domain Transformations
 # Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
# Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
Lecture 1 Introduction & Fundamentals
 Digital Image Processing Lecture 1 Introduction & Fundamentals Presented By: Diwakar Yagyasen Sr. Lecturer CS&E, BBDNITM, Lucknow What is an image? a representation, likeness, or imitation of an object
Digital Image Processing Lecture 1 Introduction & Fundamentals Presented By: Diwakar Yagyasen Sr. Lecturer CS&E, BBDNITM, Lucknow What is an image? a representation, likeness, or imitation of an object
Image processing. Reading. What is an image? Brian Curless CSE 457 Spring 2017
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. [online handout] Image processing Brian Curless CSE 457 Spring 2017 1 2 What is an
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. [online handout] Image processing Brian Curless CSE 457 Spring 2017 1 2 What is an
What will we learn? Neighborhood processing. Convolution and correlation. Neighborhood processing. Chapter 10 Neighborhood Processing
 What will we learn? Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 10 Neighborhood Processing By Dr. Debao Zhou 1 What is neighborhood processing and how does it differ from point
What will we learn? Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 10 Neighborhood Processing By Dr. Debao Zhou 1 What is neighborhood processing and how does it differ from point
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
Vivekananda. Collegee of Engineering & Technology. Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT.
 Vivekananda Collegee of Engineering & Technology Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT Dept. Prepared by Harivinod N Assistant Professor, of Computer Science and Engineering,
Vivekananda Collegee of Engineering & Technology Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT Dept. Prepared by Harivinod N Assistant Professor, of Computer Science and Engineering,
EECS 556 Image Processing W 09. Image enhancement. Smoothing and noise removal Sharpening filters
 EECS 556 Image Processing W 09 Image enhancement Smoothing and noise removal Sharpening filters What is image processing? Image processing is the application of 2D signal processing methods to images Image
EECS 556 Image Processing W 09 Image enhancement Smoothing and noise removal Sharpening filters What is image processing? Image processing is the application of 2D signal processing methods to images Image
UNIT-2 IMAGE REPRESENTATION IMAGE REPRESENTATION IMAGE SENSORS IMAGE SENSORS- FLEX CIRCUIT ASSEMBLY
 18-08-2016 UNIT-2 In the following slides we will consider what is involved in capturing a digital image of a real-world scene Image sensing and representation Image Acquisition Sampling and quantisation
18-08-2016 UNIT-2 In the following slides we will consider what is involved in capturing a digital image of a real-world scene Image sensing and representation Image Acquisition Sampling and quantisation
2D Image Processing INFORMATIK. Kaiserlautern University. DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
 2D Image Processing - Filtering Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 What is image filtering?
2D Image Processing - Filtering Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 What is image filtering?
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Interpolation and Spatial Transformations 2 Image Interpolation
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Interpolation and Spatial Transformations 2 Image Interpolation
CoE4TN3 Medical Image Processing
 CoE4TN3 Medical Image Processing Image Restoration Noise Image sensor might produce noise because of environmental conditions or quality of sensing elements. Interference in the image transmission channel.
CoE4TN3 Medical Image Processing Image Restoration Noise Image sensor might produce noise because of environmental conditions or quality of sensing elements. Interference in the image transmission channel.
Computer Vision I - Basics of Image Processing Part 1
 Computer Vision I - Basics of Image Processing Part 1 Carsten Rother 28/10/2014 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing 28/10/2014 2
Computer Vision I - Basics of Image Processing Part 1 Carsten Rother 28/10/2014 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing 28/10/2014 2
Digital Image Fundamentals. Prof. George Wolberg Dept. of Computer Science City College of New York
 Digital Image Fundamentals Prof. George Wolberg Dept. of Computer Science City College of New York Objectives In this lecture we discuss: - Image acquisition - Sampling and quantization - Spatial and graylevel
Digital Image Fundamentals Prof. George Wolberg Dept. of Computer Science City College of New York Objectives In this lecture we discuss: - Image acquisition - Sampling and quantization - Spatial and graylevel
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010
 An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Filters and Pyramids. CSC320: Introduction to Visual Computing Michael Guerzhoy. Many slides from Steve Marschner, Alexei Efros
 Filters and Pyramids Wassily Kandinsky, "Accent in Pink" Many slides from Steve Marschner, Alexei Efros CSC320: Introduction to Visual Computing Michael Guerzhoy Moving Average In 2D What are the weights
Filters and Pyramids Wassily Kandinsky, "Accent in Pink" Many slides from Steve Marschner, Alexei Efros CSC320: Introduction to Visual Computing Michael Guerzhoy Moving Average In 2D What are the weights
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Sampling and Reconstruction
 Sampling and Reconstruction Sampling and Reconstruction Sampling and Spatial Resolution Spatial Aliasing Problem: Spatial aliasing is insufficient sampling of data along the space axis, which occurs because
Sampling and Reconstruction Sampling and Reconstruction Sampling and Spatial Resolution Spatial Aliasing Problem: Spatial aliasing is insufficient sampling of data along the space axis, which occurs because
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
IMAGING. Images are stored by capturing the binary data using some electronic devices (SENSORS)
") IMAGING Film photography Digital photography Images are stored by capturing the binary data using some electronic devices (SENSORS) Sensors: Charge Coupled Device (CCD) Photo multiplier tube (PMT) The
IMAGING Film photography Digital photography Images are stored by capturing the binary data using some electronic devices (SENSORS) Sensors: Charge Coupled Device (CCD) Photo multiplier tube (PMT) The
Relationship between Fourier Space and Image Space. Academic Resource Center
 Relationship between Fourier Space and Image Space Academic Resource Center Presentation Outline What is an image? Noise Why do we transform images? What is the Fourier Transform? Examples of images in
Relationship between Fourier Space and Image Space Academic Resource Center Presentation Outline What is an image? Noise Why do we transform images? What is the Fourier Transform? Examples of images in
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
Sampling and Reconstruction. Most slides from Steve Marschner
 Sampling and Reconstruction Most slides from Steve Marschner 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Sampling and Reconstruction Sampled representations How to store and compute
Sampling and Reconstruction Most slides from Steve Marschner 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Sampling and Reconstruction Sampled representations How to store and compute
Lecture 4: Image Processing
 Lecture 4: Image Processing Definitions Many graphics techniques that operate only on images Image processing: operations that take images as input, produce images as output In its most general form, an
Lecture 4: Image Processing Definitions Many graphics techniques that operate only on images Image processing: operations that take images as input, produce images as output In its most general form, an
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
Noise Model. Important Noise Probability Density Functions (Cont.) Important Noise Probability Density Functions
 Important Noise Probability Density Functions") Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
Image Enhancement: To improve the quality of images
 Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
x' = c 1 x + c 2 y + c 3 xy + c 4 y' = c 5 x + c 6 y + c 7 xy + c 8
 1. Explain about gray level interpolation. The distortion correction equations yield non integer values for x' and y'. Because the distorted image g is digital, its pixel values are defined only at integer
1. Explain about gray level interpolation. The distortion correction equations yield non integer values for x' and y'. Because the distorted image g is digital, its pixel values are defined only at integer
Announcements. Image Matching! Source & Destination Images. Image Transformation 2/ 3/ 16. Compare a big image to a small image
 2/3/ Announcements PA is due in week Image atching! Leave time to learn OpenCV Think of & implement something creative CS 50 Lecture #5 February 3 rd, 20 2/ 3/ 2 Compare a big image to a small image So
2/3/ Announcements PA is due in week Image atching! Leave time to learn OpenCV Think of & implement something creative CS 50 Lecture #5 February 3 rd, 20 2/ 3/ 2 Compare a big image to a small image So
SYDE 575: Introduction to Image Processing
 SYDE 575: Introduction to Image Processing Image Enhancement and Restoration in Spatial Domain Chapter 3 Spatial Filtering Recall 2D discrete convolution g[m, n] = f [ m, n] h[ m, n] = f [i, j ] h[ m i,
SYDE 575: Introduction to Image Processing Image Enhancement and Restoration in Spatial Domain Chapter 3 Spatial Filtering Recall 2D discrete convolution g[m, n] = f [ m, n] h[ m, n] = f [i, j ] h[ m i,
Chapter 2 - Fundamentals. Comunicação Visual Interactiva
 Chapter - Fundamentals Comunicação Visual Interactiva Structure of the human eye (1) CVI Structure of the human eye () Celular structure of the retina. On the right we can see one cone between two groups
Chapter - Fundamentals Comunicação Visual Interactiva Structure of the human eye (1) CVI Structure of the human eye () Celular structure of the retina. On the right we can see one cone between two groups
Edge Detection. Today s reading. Cipolla & Gee on edge detection (available online) From Sandlot Science
 From Sandlot Science") Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Basic relations between pixels (Chapter 2)
") Basic relations between pixels (Chapter 2) Lecture 3 Basic Relationships Between Pixels Definitions: f(x,y): digital image Pixels: q, p (p,q f) A subset of pixels of f(x,y): S A typology of relations:
Basic relations between pixels (Chapter 2) Lecture 3 Basic Relationships Between Pixels Definitions: f(x,y): digital image Pixels: q, p (p,q f) A subset of pixels of f(x,y): S A typology of relations:
Chapter - 2 : IMAGE ENHANCEMENT
 Chapter - : IMAGE ENHANCEMENT The principal objective of enhancement technique is to process a given image so that the result is more suitable than the original image for a specific application Image Enhancement
Chapter - : IMAGE ENHANCEMENT The principal objective of enhancement technique is to process a given image so that the result is more suitable than the original image for a specific application Image Enhancement
EC-433 Digital Image Processing
 EC-433 Digital Image Processing Lecture 4 Digital Image Fundamentals Dr. Arslan Shaukat Acknowledgement: Lecture slides material from Dr. Rehan Hafiz, Gonzalez and Woods Interpolation Required in image
EC-433 Digital Image Processing Lecture 4 Digital Image Fundamentals Dr. Arslan Shaukat Acknowledgement: Lecture slides material from Dr. Rehan Hafiz, Gonzalez and Woods Interpolation Required in image
Computer Vision I - Filtering and Feature detection
 Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Introduction to Digital Image Processing
 Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
Image Processing. Traitement d images. Yuliya Tarabalka Tel.
 Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
Warping. 12 May 2015
 Warping 12 May 2015 Warping, morphing, mosaic Slides from Durand and Freeman (MIT), Efros (CMU, Berkeley), Szeliski (MSR), Seitz (UW), Lowe (UBC) http://szeliski.org/book/ 2 Image Warping Image filtering:
Warping 12 May 2015 Warping, morphing, mosaic Slides from Durand and Freeman (MIT), Efros (CMU, Berkeley), Szeliski (MSR), Seitz (UW), Lowe (UBC) http://szeliski.org/book/ 2 Image Warping Image filtering:
Image Processing. Bilkent University. CS554 Computer Vision Pinar Duygulu
 Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
Image Processing CS 554 Computer Vision Pinar Duygulu Bilkent University Today Image Formation Point and Blob Processing Binary Image Processing Readings: Gonzalez & Woods, Ch. 3 Slides are adapted from
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
CPSC 425: Computer Vision
 CPSC 425: Computer Vision Image Credit: https://docs.adaptive-vision.com/4.7/studio/machine_vision_guide/templatematching.html Lecture 9: Template Matching (cont.) and Scaled Representations ( unless otherwise
CPSC 425: Computer Vision Image Credit: https://docs.adaptive-vision.com/4.7/studio/machine_vision_guide/templatematching.html Lecture 9: Template Matching (cont.) and Scaled Representations ( unless otherwise
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Image Processing Lecture 10
 Image Restoration Image restoration attempts to reconstruct or recover an image that has been degraded by a degradation phenomenon. Thus, restoration techniques are oriented toward modeling the degradation
Image Restoration Image restoration attempts to reconstruct or recover an image that has been degraded by a degradation phenomenon. Thus, restoration techniques are oriented toward modeling the degradation
Computer Vision and Graphics (ee2031) Digital Image Processing I
 Digital Image Processing I") Computer Vision and Graphics (ee203) Digital Image Processing I Dr John Collomosse J.Collomosse@surrey.ac.uk Centre for Vision, Speech and Signal Processing University of Surrey Learning Outcomes After
Computer Vision and Graphics (ee203) Digital Image Processing I Dr John Collomosse J.Collomosse@surrey.ac.uk Centre for Vision, Speech and Signal Processing University of Surrey Learning Outcomes After
Islamic University of Gaza Faculty of Engineering Computer Engineering Department
 Islamic University of Gaza Faculty of Engineering Computer Engineering Department EELE 5310: Digital Image Processing Spring 2011 Date: May 29, 2011 Time : 120 minutes Final Exam Student Name: Student
Islamic University of Gaza Faculty of Engineering Computer Engineering Department EELE 5310: Digital Image Processing Spring 2011 Date: May 29, 2011 Time : 120 minutes Final Exam Student Name: Student
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Digital Image Fundamentals
 Digital Image Fundamentals Image Quality Objective/ subjective Machine/human beings Mathematical and Probabilistic/ human intuition and perception 6 Structure of the Human Eye photoreceptor cells 75~50
Digital Image Fundamentals Image Quality Objective/ subjective Machine/human beings Mathematical and Probabilistic/ human intuition and perception 6 Structure of the Human Eye photoreceptor cells 75~50
Image Enhancement in Spatial Domain (Chapter 3)
") Image Enhancement in Spatial Domain (Chapter 3) Yun Q. Shi shi@njit.edu Fall 11 Mask/Neighborhood Processing ECE643 2 1 Point Processing ECE643 3 Image Negatives S = (L 1) - r (3.2-1) Point processing
Image Enhancement in Spatial Domain (Chapter 3) Yun Q. Shi shi@njit.edu Fall 11 Mask/Neighborhood Processing ECE643 2 1 Point Processing ECE643 3 Image Negatives S = (L 1) - r (3.2-1) Point processing
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 9: Image alignment http://www.wired.com/gadgetlab/2010/07/camera-software-lets-you-see-into-the-past/ Szeliski: Chapter 6.1 Reading All 2D Linear Transformations
CS4670: Computer Vision Noah Snavely Lecture 9: Image alignment http://www.wired.com/gadgetlab/2010/07/camera-software-lets-you-see-into-the-past/ Szeliski: Chapter 6.1 Reading All 2D Linear Transformations
Image Acquisition + Histograms
 Image Processing - Lesson 1 Image Acquisition + Histograms Image Characteristics Image Acquisition Image Digitization Sampling Quantization Histograms Histogram Equalization What is an Image? An image
Image Processing - Lesson 1 Image Acquisition + Histograms Image Characteristics Image Acquisition Image Digitization Sampling Quantization Histograms Histogram Equalization What is an Image? An image
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Filtering Images. Contents
 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Filtering in frequency domain
 Filtering in frequency domain FFT FFT = Inverse FFT Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert
Filtering in frequency domain FFT FFT = Inverse FFT Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert
Filtering Images in the Spatial Domain Chapter 3b G&W. Ross Whitaker (modified by Guido Gerig) School of Computing University of Utah
 School of Computing University of Utah") Filtering Images in the Spatial Domain Chapter 3b G&W Ross Whitaker (modified by Guido Gerig) School of Computing University of Utah 1 Overview Correlation and convolution Linear filtering Smoothing, kernels,
Filtering Images in the Spatial Domain Chapter 3b G&W Ross Whitaker (modified by Guido Gerig) School of Computing University of Utah 1 Overview Correlation and convolution Linear filtering Smoothing, kernels,
Correction and Calibration 2. Preprocessing
 Correction and Calibration Reading: Chapter 7, 8. 8.3 ECE/OPTI 53 Image Processing Lab for Remote Sensing Preprocessing Required for certain sensor characteristics and systematic defects Includes: noise
Correction and Calibration Reading: Chapter 7, 8. 8.3 ECE/OPTI 53 Image Processing Lab for Remote Sensing Preprocessing Required for certain sensor characteristics and systematic defects Includes: noise
JNTUWORLD. 4. Prove that the average value of laplacian of the equation 2 h = ((r2 σ 2 )/σ 4 ))exp( r 2 /2σ 2 ) is zero. [16]
![JNTUWORLD. 4. Prove that the average value of laplacian of the equation 2 h = ((r2 σ 2 )/σ 4 ))exp( r 2 /2σ 2 ) is zero. [16]](/thumbs/78/78591353.jpg "JNTUWORLD. 4. Prove that the average value of laplacian of the equation 2 h = ((r2 σ 2 )/σ 4 ))exp( r 2 /2σ 2 ) is zero. [16]") Code No: 07A70401 R07 Set No. 2 1. (a) What are the basic properties of frequency domain with respect to the image processing. (b) Define the terms: i. Impulse function of strength a ii. Impulse function
Code No: 07A70401 R07 Set No. 2 1. (a) What are the basic properties of frequency domain with respect to the image processing. (b) Define the terms: i. Impulse function of strength a ii. Impulse function
Edge Detection. CS664 Computer Vision. 3. Edges. Several Causes of Edges. Detecting Edges. Finite Differences. The Gradient
 Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
Digital Image Processing
 Digital Image Processing Image Restoration and Reconstruction (Noise Removal) Christophoros Nikou cnikou@cs.uoi.gr University of Ioannina - Department of Computer Science and Engineering 2 Image Restoration
Digital Image Processing Image Restoration and Reconstruction (Noise Removal) Christophoros Nikou cnikou@cs.uoi.gr University of Ioannina - Department of Computer Science and Engineering 2 Image Restoration
Digital Image Processing. Prof. P. K. Biswas. Department of Electronic & Electrical Communication Engineering
 Digital Image Processing Prof. P. K. Biswas Department of Electronic & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 21 Image Enhancement Frequency Domain Processing
Digital Image Processing Prof. P. K. Biswas Department of Electronic & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 21 Image Enhancement Frequency Domain Processing
Digital Image Processing
 Digital Image Processing Lecture # 6 Image Enhancement in Spatial Domain- II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Local/
Digital Image Processing Lecture # 6 Image Enhancement in Spatial Domain- II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Local/
Filtering and Enhancing Images
 KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
Motion. 1 Introduction. 2 Optical Flow. Sohaib A Khan. 2.1 Brightness Constancy Equation
 Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Recall: Derivative of Gaussian Filter. Lecture 7: Correspondence Matching. Observe and Generalize. Observe and Generalize. Observe and Generalize
 Recall: Derivative of Gaussian Filter G x I x =di(x,y)/dx Lecture 7: Correspondence Matching Reading: T&V Section 7.2 I(x,y) G y convolve convolve I y =di(x,y)/dy Observe and Generalize Derivative of Gaussian
Recall: Derivative of Gaussian Filter G x I x =di(x,y)/dx Lecture 7: Correspondence Matching Reading: T&V Section 7.2 I(x,y) G y convolve convolve I y =di(x,y)/dy Observe and Generalize Derivative of Gaussian
Image Processing. Filtering. Slide 1
 Image Processing Filtering Slide 1 Preliminary Image generation Original Noise Image restoration Result Slide 2 Preliminary Classic application: denoising However: Denoising is much more than a simple
Image Processing Filtering Slide 1 Preliminary Image generation Original Noise Image restoration Result Slide 2 Preliminary Classic application: denoising However: Denoising is much more than a simple
Unit - I Computer vision Fundamentals
 Unit - I Computer vision Fundamentals It is an area which concentrates on mimicking human vision systems. As a scientific discipline, computer vision is concerned with the theory behind artificial systems
Unit - I Computer vision Fundamentals It is an area which concentrates on mimicking human vision systems. As a scientific discipline, computer vision is concerned with the theory behind artificial systems
Introduction to Digital Image Processing
 Introduction to Digital Image Processing Ranga Rodrigo June 9, 29 Outline Contents Introduction 2 Point Operations 2 Histogram Processing 5 Introduction We can process images either in spatial domain or
Introduction to Digital Image Processing Ranga Rodrigo June 9, 29 Outline Contents Introduction 2 Point Operations 2 Histogram Processing 5 Introduction We can process images either in spatial domain or
ENG 7854 / 9804 Industrial Machine Vision. Midterm Exam March 1, 2010.
 ENG 7854 / 9804 Industrial Machine Vision Midterm Exam March 1, 2010. Instructions: a) The duration of this exam is 50 minutes (10 minutes per question). b) Answer all five questions in the space provided.
ENG 7854 / 9804 Industrial Machine Vision Midterm Exam March 1, 2010. Instructions: a) The duration of this exam is 50 minutes (10 minutes per question). b) Answer all five questions in the space provided.
Lecture 3 - Intensity transformation
 Computer Vision Lecture 3 - Intensity transformation Instructor: Ha Dai Duong duonghd@mta.edu.vn 22/09/2015 1 Today s class 1. Gray level transformations 2. Bit-plane slicing 3. Arithmetic/logic operators
Computer Vision Lecture 3 - Intensity transformation Instructor: Ha Dai Duong duonghd@mta.edu.vn 22/09/2015 1 Today s class 1. Gray level transformations 2. Bit-plane slicing 3. Arithmetic/logic operators
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Digital Image Processing. Image Enhancement - Filtering
 Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/05 TEXTURE ANALYSIS
 ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/ TEXTURE ANALYSIS Texture analysis is covered very briefly in Gonzalez and Woods, pages 66 671. This handout is intended to supplement that
ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/ TEXTURE ANALYSIS Texture analysis is covered very briefly in Gonzalez and Woods, pages 66 671. This handout is intended to supplement that
Image restoration. Restoration: Enhancement:
 Image restoration Most images obtained by optical, electronic, or electro-optic means is likely to be degraded. The degradation can be due to camera misfocus, relative motion between camera and object,
Image restoration Most images obtained by optical, electronic, or electro-optic means is likely to be degraded. The degradation can be due to camera misfocus, relative motion between camera and object,
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Review for Exam I, EE552 2/2009
 Gonale & Woods Review or Eam I, EE55 /009 Elements o Visual Perception Image Formation in the Ee and relation to a photographic camera). Brightness Adaption and Discrimination. Light and the Electromagnetic
Gonale & Woods Review or Eam I, EE55 /009 Elements o Visual Perception Image Formation in the Ee and relation to a photographic camera). Brightness Adaption and Discrimination. Light and the Electromagnetic
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Hybrid filters for medical image reconstruction
 Vol. 6(9), pp. 177-182, October, 2013 DOI: 10.5897/AJMCSR11.124 ISSN 2006-9731 2013 Academic Journals http://www.academicjournals.org/ajmcsr African Journal of Mathematics and Computer Science Research
Vol. 6(9), pp. 177-182, October, 2013 DOI: 10.5897/AJMCSR11.124 ISSN 2006-9731 2013 Academic Journals http://www.academicjournals.org/ajmcsr African Journal of Mathematics and Computer Science Research
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
A Vision System for Automatic State Determination of Grid Based Board Games
 A Vision System for Automatic State Determination of Grid Based Board Games Michael Bryson Computer Science and Engineering, University of South Carolina, 29208 Abstract. Numerous programs have been written
A Vision System for Automatic State Determination of Grid Based Board Games Michael Bryson Computer Science and Engineering, University of South Carolina, 29208 Abstract. Numerous programs have been written
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
Image warping , , Computational Photography Fall 2017, Lecture 10
 Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Digital image processing
 TOC 1/110 Digital image processing Aline Roumy Inria, Rennes, team Sirocco TOC 2/110 The course: you and me! Who am I? Researcher at Inria, Rennes. Research topic: communication of visual data (image and
TOC 1/110 Digital image processing Aline Roumy Inria, Rennes, team Sirocco TOC 2/110 The course: you and me! Who am I? Researcher at Inria, Rennes. Research topic: communication of visual data (image and
Lecture Image Enhancement and Spatial Filtering
 Lecture Image Enhancement and Spatial Filtering Harvey Rhody Chester F. Carlson Center for Imaging Science Rochester Institute of Technology rhody@cis.rit.edu September 29, 2005 Abstract Applications of
Lecture Image Enhancement and Spatial Filtering Harvey Rhody Chester F. Carlson Center for Imaging Science Rochester Institute of Technology rhody@cis.rit.edu September 29, 2005 Abstract Applications of
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
EEM 463 Introduction to Image Processing. Week 3: Intensity Transformations
 EEM 463 Introduction to Image Processing Week 3: Intensity Transformations Fall 2013 Instructor: Hatice Çınar Akakın, Ph.D. haticecinarakakin@anadolu.edu.tr Anadolu University Enhancement Domains Spatial
EEM 463 Introduction to Image Processing Week 3: Intensity Transformations Fall 2013 Instructor: Hatice Çınar Akakın, Ph.D. haticecinarakakin@anadolu.edu.tr Anadolu University Enhancement Domains Spatial
Edge Detection. Announcements. Edge detection. Origin of Edges. Mailing list: you should have received messages
 Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters