Polygon Triangulation
|
|
|
- Ginger Gilmore
- 6 years ago
- Views:
Transcription
1 Polygon Triangulation
2 Definition Simple Polygons 1. A polygon is the region of a plane bounded by a finite collection of line segments forming a simple closed curve. 2. Simple closed curve means a certain deformation of a circle.
 (adjacent segments share a")
3 Nonsimple polygons 1. For both objects in the figure, the segments satisfy condition (1) (adjacent segments share a common point) 2. but not condition (2): nonadjacent segments intersect.
4 Visibility Visibility 1. Point x can see point y (or y is visible to x) iff the closed segment xy is nowhere exterior to the polygon P (xy P) 2. A vertex can block vision
5 Visibility Visibility 1. x has clear visibility to y if xy P and xy P {x,y} 2. P means the boundary of a polygon P 3. By definition, P P 4. A guard is a point. 5. A set of guards is said to cover a polygon if every point in the polygon is visible to some guard.
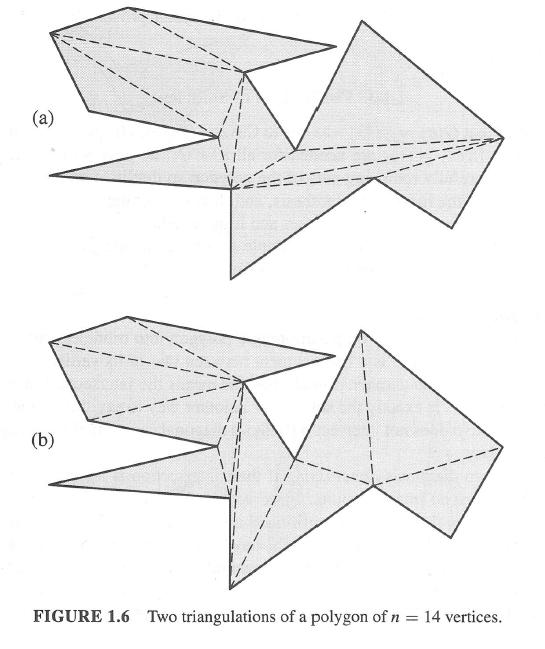
6 Triangulation Diagonals and Triangulation 1. A diagonal of a polygon P is a line segment between two of its vertices a and b that are clearly visible to one another 2. The open segment from a to b does not intersect P; thus a diagonal cannot make grazing contact with the boundary. 3. Two diagonals are noncrossing if their intersection is a subset of their endpoints. They share no interior points. 4. A triangulation of a polygon P Add as many noncrossing diagonals to a polygon as possible so that the interior can be partitioned into triangles.
7
8 Polygon Triangulation Triangulation Theory
9 Existence of a Diagonal Lemma Every polygon must have at least one strictly convex vertex. Edge of a polygon are oriented, their direction indicates counterclockwise traversal. A left turn means a strictly convex vertex A right turn means a reflex vertex. Let v be the right most lowest vertex. (Figure 1.11) Then, the interior of P must be above L. The edge following v must lie above L. v must be strictly convex
10 Existence of a Diagonal

11 Existence of a Diagonal
12 Properties of Triangulations Lemma (Number of Diagonals) Every triangulation of a polygon P of n vertices uses n 3 diagonals and consists of n 2 triangles Both claims are trivially true for n = 3. Let n 4. Partition P into P 1 and P 2. Let the two polygons have n 1 and n 2 vertices respectively. n 1 + n 2 = n + 2 Applying the induction hypothesis to the subpolygons, (n 1 3) + (n 2 3) + 1 = n 3 And there are (n 1 2) + (n 2 2) = n -2 triangles.

13 Triangulations Dual 1. The dual T of triangulation of a polygon is a graph with a node associated with each triangle and an arc between two nodes iff their triangles share a diagonal.
14 Triangulation Dual Lemma The dual T of a triangulation is a tree, with each node of degree at most three. 2. Proof Suppose T is not a Tree. Then it must have a cycle C. If this cycle is drawn as a path π in the plane, connecting the midpoints of the diagonals shared by the triangles whose nodes comprise C, then it must enclose some polygon vertices: namely one endpoint of each diagonal crossed by π. But, then π must also enclose points exterior to the polygon, for these enclosed vertices are on P. This contradicts the simplicity of the polygon.
15 Triangulation Dual 1.Three consecutive vertices of a polygon a, b, c form an ear of the polygon if ac is a diagonal; b is the ear tip.
![Triangulation Dual Meisters s Two Ears Theorem [1975] 1.](/docs-images/74/70206506/images/16-0.jpg "Every polygon of n 4 vertices has at least two non-overlapping ears.")

16 Triangulation Dual Meisters s Two Ears Theorem [1975] 1. Every polygon of n 4 vertices has at least two non-overlapping ears. 2. Proof A leaf node in a triangulation dual corresponds to an ear. A tree of two or more nodes(by Lemma 1.2.4) must have at least two leaves. 28
17 Polygon Triangulation Area of polygon
18 Area of a Triangle Let us denote this area as A(T) The area is one half the base times the altitude. The base is easy: a-b (the length of the vector a b) What about the altitude? Not so easy.
19 Cross Product Recall the magnitude of the cross product of two vectors is the area of the parallelogram. A triangle is half of a parallelogram. Thus, the area of triangle whose three vertices are arbitrary points a, b, c is half the length of A X B A = b a and B = c - a
20 Area of a Convex Polygon Find the area of any polygon by using an expression for the area of a triangle. First triangulation Every convex polygon may be triangulated as a fan, with all diagonals incident to a common vertex. The area of a polygon with vertices v 0, v 1,,v n-1 labeled counterclockwise (Figure 1.16) can be calculated as

21 Area of a Convex Polygon
 The area may be written in two")
22 Area of a Convex Quadrilateral Two different triangulations of a convex quadrilateral Q = (a, b, c, d) The area may be written in two ways.
23 Area of a Convex Quadrilateral Applying Equation (1.2) to We get Notice ac or db cancel
24 Area of a Convex Quadrilateral Generalizing, we get two terms per polygon edge None for internal diagonals. So if the coordinates of vertex v i are x i and y i, twice the area of a convex polygon is given by
25 Area of a Nonconvex Quadrilateral Can we use the same equation to calculate the area of a nonconvex quadrilateral?
26 Area of a Nonconvex Quadrilateral Suppose we have a nonconvex quadrilateral Q = (a, b, c, d) (Figure 1.18) Only one triangulation, using the diagonal db But the algebraic expression obtained is independent of the diagonal chosen The equation is still true, even though the diagonal ac is external to Q
27 Area of a Nonconvex Quadrilateral Notice A(a, c, d) is negative and the area of a nonconvex quadrilateral is abc minus A(a, c, d). Indeed, A(a, c, d) is a clockwise path, so the cross product formulation shows that the area will be negative. The phenomenon observe with a nonconvex quadrilateral is general
28 Area from an Arbitrary Center Let T = abc be a triangle, with the vertices oriented counterclockwise, and let p be any external point in the plane. Then, we claim
29 Area from an Arbitrary Center
30 Area from an Arbitrary Center Case 1: p = p 1 1. A(p 1, a, b) is negative (clockwise) 2. A(p 1, b, c) is positive (counterclockwise) 3. A(p 1, c, a) is positive (counterclockwise) Case 2: p = p 2 1. A(p 2, a, b) is negative (clockwise) 2. A(p 2, b, c) is negative (clockwise) 3. A(p 2, c, a) is positive (counterclockwise) All other positions for external p in the plane are equivalent to either p 1 or p 2 by symmetry

31 Area from an Arbitrary Center
32 Polygon Triangulation Segment Intersection
33 Left turn The point of intersection 1. Can be decided by using a Left predicate A directed line is determined by two points given (a, b) If c is to the left of the line, then the triple (a,b,c) forms counterclockwise circuit. (see figure 1.22) c is to the left of (a,b) iff A(a,b,c) is positive This can be implemented by a single call to Area2 ( See code 1.6) Straightforward but subject to the special case objections raised earlier.
34 Left turn
35 bool Left( tpointi a, tpointi b, tpointi c ) { return Area2( a, b, c ) > 0; } Left turn bool LeftOn( tpointi a, tpointi b, tpointi c ) { return Area2( a, b, c ) >= 0; } bool Collinear( tpointi a, tpointi b, tpointi c ) { return Area2( a, b, c ) == 0; } Code 1.6 Left If c is collinear with ab, then the determined triangle has zero area.
36 Boolean Intersection If ab and cd intersect in their interiors, 1. c and d are split by the line L 1 containing ab 2. Likewise a and b are split by line L 2 containing cd Neither one of these conditions is alone sufficient to guarantee intersection When two segments intersect at a point interior to both, if it is known that no three of the four endpoints are collinear
37 Boolean Intersection
38 bool IntersectProp( tpointi a, tpointi b, tpointi c, tpointi d ) { /* Eliminate improper cases. */ if ( Collinear(a,b,c) Collinear(a,b,d) Collinear(c,d,a) Collinear(c,d,b) ) return FALSE; return Xor( Left(a,b,c), Left(a,b,d) ) && Xor( Left(c,d,a), Left(c,d,b) ); } /*Exclusive or: T iff exactly one argument is true. */ bool Xor( bool x, bool y ) { /* The arguments are negated to ensure that they are 0/1 values. */ return!x ^!y; } Code 1.7 IntersectProp
39 Boolean Intersection Redundancy in this code 1. Four relevant triangle areas are being computed twice each. Two ways to remove redundancy 1. Storing computed areas in local variables 2. Designing other primitives that fit the problem better. The first if-statement may be removed entirely for the purposes of triangulation But sacrifice efficiency for clarity and leave IntersectProp as is
40 Boolean Intersection It might be tempting to implement the exclusive-or by Area2(a, b, c) * Area2(a, b, d) < 0 && Area2(c, d, a) * Area2(c, d, b) < 0; But the product of the areas might cause integer word overflow!
41 Improper Intersection
42 Improper Intersection Special case of improper intersection 1. An endpoint of one segment (say c) lies somewhere on the other segment ab (Figure 1.24(a)) 2. This only happens if a, b, c are collinear 3. But collinearity is not a sufficient condition for intersection (Figure 1.24(b)) Need to decide betweenness
43 Betweenness Only check betweenness of c when we know it lies on the line containing ab If ab is not vertical 1. c lies on ab iff the x coordinate of c falls in the interval of the x coordinates of a and b If ab is vertical 1. Similarly check on y coordinates
44 Betweenness bool Between( tpointi a, tpointi b, tpointi c ) { tpointi ba, ca; } if (! Collinear( a, b, c ) ) return FALSE; /* If ab not vertical, check betweenness on x; else on y. */ if ( a[x]!= b[x] ) return ((a[x] <= c[x]) && (c[x] <= b[x])) ((a[x] >= c[x]) && (c[x] >= b[x])); else return ((a[y] <= c[y]) && (c[y] <= b[y])) ((a[y] >= c[y]) && (c[y] >= b[y])); Code 1.8 Between
45 Segment Intersection Code bool Intersect( tpointi a, tpointi b, tpointi c, tpointi d ) { if ( IntersectProp( a, b, c, d ) ) return TRUE; else if ( Between( a, b, c ) Between( a, b, d ) Between( c, d, a ) Between( c, d, b ) ) return TRUE; else return FALSE; } Code 1.9 Intersect
46 Segment Intersection Code bool Diagonalie( tvertex a, tvertex b ) { tvertex c, c1; } /* For each edge (c,c1) of P */ c = vertices; do { c1 = c->next; /* Skip edges incident to a or b */ if ( ( c!= a ) && ( c1!= a ) && ( c!= b ) && ( c1!= b ) && Intersect( a->v, b->v, c->v, c1->v ) ) return FALSE; c = c->next; } while ( c!= vertices ); return TRUE; Code 1.10 Diagonalie
47 Polygon Triangulation Internal or External
48 InCone Goal: distinguish the internal from the external diagonals One vector B (along the diagonal) lies strictly in the open cone counterclockwise between two other vectors A and C (along two consecutive edges) Need to consider convex and reflex angles
49 InCone Convex case (Figure 1.25 a) 1. s is internal to P iff it is internal to the cone whose apex is a, and whose sides pass through a - and a + 2. Easily determined by our Left function 3. a - must be left of ab and a + must be left of ba Reflex case (Figure 1.25 b) 1. reverse of the convex case
50 InCone
51 InCone Distinguishing between the convex and reflex cases is accomplished with one invocation of Left a is convex iff a - is left or on aa + Note that if (a -, a, a + ) are collinear, the internal angle at a is π, which we define as convex
52 InCone bool InCone( tvertex a, tvertex b ) { tvertex a0,a1; /* a0,a,a1 are consecutive vertices. */ a1 = a->next; a0 = a->prev; /* If a is a convex vertex... */ if( LeftOn( a->v, a1->v, a0->v ) ) return Left( a->v, b->v, a0->v ) && Left( b->v, a->v, a1->v ); } /* Else a is reflex: */ return!( LeftOn( a->v, b->v, a1->v ) && LeftOn( b->v, a->v, a0->v ) ); Code 1.11 InCone
53 Diagonal ab is a diagonal iff Diagonalie(a, b), InCone(a, b), and InCone(b, a) are ture How to order function calls 1. InCones should be first 2. They are each constant-time calculation 3. Each performs in the neighborhood a and b without regard to the remainder of the polygon, whereas Diagonalie includes a loop over all n polygon edges.
54 Diagonal bool Diagonal( tvertex a, tvertex b ) { return InCone( a, b ) && InCone( b, a ) && Diagonalie( a, b ); } Code 1.12 Diagonal
55 Triangulation Diagonal-Based Algorithm It is an O(n 4 ) algorithm 1. (n choose 2) diagonal candidates = O(n 2 ) 2. Testing each for diagonalhood = O(n) 3. Reapting this O(n 3 ) computation for each of the n-3 diagonals = O(n 4 ) Use the two ears theorem to speed up Only O(n) ear diagonal candidates We can achieve a worst-case complexity of O(n 3 ) this way
56 Ear Removal Ear Removal Improve the above algorithm to O(n 2 ) 1. Because one call to Diagonal costs O(n), Diagonal may only be called O(n) times Key idea 1. Removal of one ear does not change the polygon very much 2. Not change whether or not many of its vertices are potential ear tips Determination for potential ear tip of each vertex already uses O(n 2 ), but is not repeated
57 Ear Removal Ear Removal Let (v 0, v 1, v 2, v 3, v 4 ) be five consecutive vertices of P Suppose v 2 is an ear tip and the ear E 2 = (v 1, v 2, v 3 ) is deleted (see Figure 1.26) Only v 1 and v 3 change Neighbor vertices remain unchanged
58 Ear Removal
59 Ear Removal Ear Removal After the expensive initialization step, the ear tip status information can be updated with two calls to Diagonal per iteration Algorithm: TRIANGULATION Initialize the ear tip status of each vertex while n > 3 do Locate an ear tip v 2. Output diagonal v 1 v 3. Delete v 2. Update the ear tip status of v 1 and v 3.
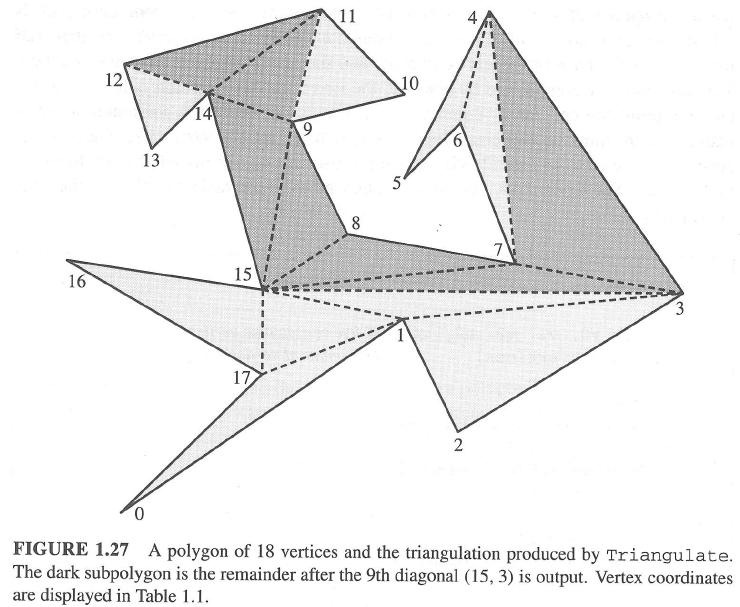
60 Example Figure 1.27 shows a polygon and the triangulation produced by the simple main program(code 1.15) main() { ReadVertices(); PrintVertices(); Triangulate(); } Code 1.15 main
61 Example
62 Example Now walk through the output of the diagonals v 0 is an ear tip, so the first diagonal output is (17,1) v 1 is not an ear tip, so v2 pointer moves to v 2 v 2 is a tip, so print the diagonal (1,3) Neither v 3 nor v 4 is an ear tip At v 5, the next diagonal is (4,6) v 3 v 8 is collinear with v 7, so the next ear detected is not until v 10 Another collinearity, v 9 with (v 11 v 15 ), prevents v 9 from being an ear
63 Example Table 1.2. The columns show the order in which the diagonals, specified as pairs of endpoint indices, are output Order Diagonal Indices Order Diagonal Indices 1 (17, 1) 10 (3, 7) 2 (1, 3) 11 (11, 14) 3 (4, 6) 12 (15, 7) 4 (4, 7) 13 (15, 8) 5 (9, 11) 14 (15, 9) 6 (12, 14) 15 (9, 14) 7 (15, 17) 8 (15, 1) 9 (15, 3)
64 Conclusion We learned 1. what is a polygon, diagonal, triangulation 2. how to determine the area of polygons if 3 points, collinear, turn-left, in-between if two segment intersect if a segment is internal or external a polygon ears in a polygon Homework assignment: , , , (due 9/10 before the class) Programming assignment: Coming up next week 76
Week 3 Polygon Triangulation
 1 Week 3 Polygon Triangulation 2 Polygon A polygon is the region of a plane bounded by a fnite collection of line segments forming a simple closed curve. The intersection of adjacent segments is the shared
1 Week 3 Polygon Triangulation 2 Polygon A polygon is the region of a plane bounded by a fnite collection of line segments forming a simple closed curve. The intersection of adjacent segments is the shared
Week 2 Polygon Triangulation
 Week 2 Polygon Triangulation What is a polygon? Last week A polygonal chain is a connected series of line segments A closed polygonal chain is a polygonal chain, such that there is also a line segment
Week 2 Polygon Triangulation What is a polygon? Last week A polygonal chain is a connected series of line segments A closed polygonal chain is a polygonal chain, such that there is also a line segment
Computational Geometry
 Motivation Motivation Polygons and visibility Visibility in polygons Triangulation Proof of the Art gallery theorem Two points in a simple polygon can see each other if their connecting line segment is
Motivation Motivation Polygons and visibility Visibility in polygons Triangulation Proof of the Art gallery theorem Two points in a simple polygon can see each other if their connecting line segment is
Polygon decomposition. Motivation: Art gallery problem
 CG Lecture 3 Polygon decomposition 1. Polygon triangulation Triangulation theory Monotone polygon triangulation 2. Polygon decomposition into monotone pieces 3. Trapezoidal decomposition 4. Convex decomposition
CG Lecture 3 Polygon decomposition 1. Polygon triangulation Triangulation theory Monotone polygon triangulation 2. Polygon decomposition into monotone pieces 3. Trapezoidal decomposition 4. Convex decomposition
The statement implies that any three intersection points of two distinct planes lie on a line.
 Math 3181 Dr. Franz Rothe February 23, 2015 All3181\3181_spr15ts1.tex 1 Solution of Test Name: Problem 1.1. The second part of Hilbert s Proposition 1 states: Any two different planes have either no point
Math 3181 Dr. Franz Rothe February 23, 2015 All3181\3181_spr15ts1.tex 1 Solution of Test Name: Problem 1.1. The second part of Hilbert s Proposition 1 states: Any two different planes have either no point
EXTREME POINTS AND AFFINE EQUIVALENCE
 EXTREME POINTS AND AFFINE EQUIVALENCE The purpose of this note is to use the notions of extreme points and affine transformations which are studied in the file affine-convex.pdf to prove that certain standard
EXTREME POINTS AND AFFINE EQUIVALENCE The purpose of this note is to use the notions of extreme points and affine transformations which are studied in the file affine-convex.pdf to prove that certain standard
Pebble Sets in Convex Polygons
 2 1 Pebble Sets in Convex Polygons Kevin Iga, Randall Maddox June 15, 2005 Abstract Lukács and András posed the problem of showing the existence of a set of n 2 points in the interior of a convex n-gon
2 1 Pebble Sets in Convex Polygons Kevin Iga, Randall Maddox June 15, 2005 Abstract Lukács and András posed the problem of showing the existence of a set of n 2 points in the interior of a convex n-gon
Polygon Partitioning. Lecture03
 1 Polygon Partitioning Lecture03 2 History of Triangulation Algorithms 3 Outline Monotone polygon Triangulation of monotone polygon Trapezoidal decomposition Decomposition in monotone mountain Convex decomposition
1 Polygon Partitioning Lecture03 2 History of Triangulation Algorithms 3 Outline Monotone polygon Triangulation of monotone polygon Trapezoidal decomposition Decomposition in monotone mountain Convex decomposition
The Art Gallery Problem: An Overview and Extension to Chromatic Coloring and Mobile Guards
 The Art Gallery Problem: An Overview and Extension to Chromatic Coloring and Mobile Guards Nicole Chesnokov May 16, 2018 Contents 1 Introduction 2 2 The Art Gallery Problem 3 2.1 Proof..................................
The Art Gallery Problem: An Overview and Extension to Chromatic Coloring and Mobile Guards Nicole Chesnokov May 16, 2018 Contents 1 Introduction 2 2 The Art Gallery Problem 3 2.1 Proof..................................
MISCELLANEOUS SHAPES
 MISCELLANEOUS SHAPES 4.1. INTRODUCTION Five generic shapes of polygons have been usefully distinguished in the literature: convex, orthogonal, star, spiral, and monotone. 1 Convex polygons obviously do
MISCELLANEOUS SHAPES 4.1. INTRODUCTION Five generic shapes of polygons have been usefully distinguished in the literature: convex, orthogonal, star, spiral, and monotone. 1 Convex polygons obviously do
Lecture 3: Art Gallery Problems and Polygon Triangulation
 EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
The Graphs of Triangulations of Polygons
 The Graphs of Triangulations of Polygons Matthew O Meara Research Experience for Undergraduates Summer 006 Basic Considerations Let Γ(n) be the graph with vertices being the labeled planar triangulation
The Graphs of Triangulations of Polygons Matthew O Meara Research Experience for Undergraduates Summer 006 Basic Considerations Let Γ(n) be the graph with vertices being the labeled planar triangulation
BMO Round 1 Problem 6 Solutions
 BMO 2005 2006 Round 1 Problem 6 Solutions Joseph Myers November 2005 Introduction Problem 6 is: 6. Let T be a set of 2005 coplanar points with no three collinear. Show that, for any of the 2005 points,
BMO 2005 2006 Round 1 Problem 6 Solutions Joseph Myers November 2005 Introduction Problem 6 is: 6. Let T be a set of 2005 coplanar points with no three collinear. Show that, for any of the 2005 points,
Definition 1 (Hand-shake model). A hand shake model is an incidence geometry for which every line has exactly two points.
. A hand shake model is an incidence geometry for which every line has exactly two points.") Math 3181 Dr. Franz Rothe Name: All3181\3181_spr13t1.tex 1 Solution of Test I Definition 1 (Hand-shake model). A hand shake model is an incidence geometry for which every line has exactly two points. Definition
Math 3181 Dr. Franz Rothe Name: All3181\3181_spr13t1.tex 1 Solution of Test I Definition 1 (Hand-shake model). A hand shake model is an incidence geometry for which every line has exactly two points. Definition
Moore Catholic High School Math Department
 Moore Catholic High School Math Department Geometry Vocabulary The following is a list of terms and properties which are necessary for success in a Geometry class. You will be tested on these terms during
Moore Catholic High School Math Department Geometry Vocabulary The following is a list of terms and properties which are necessary for success in a Geometry class. You will be tested on these terms during
Section 12.1 Translations and Rotations
 Section 12.1 Translations and Rotations Any rigid motion that preserves length or distance is an isometry. We look at two types of isometries in this section: translations and rotations. Translations A
Section 12.1 Translations and Rotations Any rigid motion that preserves length or distance is an isometry. We look at two types of isometries in this section: translations and rotations. Translations A
CS 532: 3D Computer Vision 14 th Set of Notes
 1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
EXTERNAL VISIBILITY. 1. Definitions and notation. The boundary and interior of
 PACIFIC JOURNAL OF MATHEMATICS Vol. 64, No. 2, 1976 EXTERNAL VISIBILITY EDWIN BUCHMAN AND F. A. VALENTINE It is possible to see any eleven vertices of an opaque solid regular icosahedron from some appropriate
PACIFIC JOURNAL OF MATHEMATICS Vol. 64, No. 2, 1976 EXTERNAL VISIBILITY EDWIN BUCHMAN AND F. A. VALENTINE It is possible to see any eleven vertices of an opaque solid regular icosahedron from some appropriate
If three points A (h, 0), P (a, b) and B (0, k) lie on a line, show that: a b 1.
, P (a, b) and B (0, k) lie on a line, show that: a b 1.") ASSIGNMENT ON STRAIGHT LINES LEVEL 1 (CBSE/NCERT/STATE BOARDS) 1 Find the angle between the lines joining the points (0, 0), (2, 3) and the points (2, 2), (3, 5). 2 What is the value of y so that the line
ASSIGNMENT ON STRAIGHT LINES LEVEL 1 (CBSE/NCERT/STATE BOARDS) 1 Find the angle between the lines joining the points (0, 0), (2, 3) and the points (2, 2), (3, 5). 2 What is the value of y so that the line
2 Geometry Solutions
 2 Geometry Solutions jacques@ucsd.edu Here is give problems and solutions in increasing order of difficulty. 2.1 Easier problems Problem 1. What is the minimum number of hyperplanar slices to make a d-dimensional
2 Geometry Solutions jacques@ucsd.edu Here is give problems and solutions in increasing order of difficulty. 2.1 Easier problems Problem 1. What is the minimum number of hyperplanar slices to make a d-dimensional
Chapter 1. Essentials of Geometry
 Chapter 1 Essentials of Geometry 1.1 Identify Points, Lines, and Planes Objective: Name and sketch geometric figures so you can use geometry terms in the real world. Essential Question: How do you name
Chapter 1 Essentials of Geometry 1.1 Identify Points, Lines, and Planes Objective: Name and sketch geometric figures so you can use geometry terms in the real world. Essential Question: How do you name
Moore Catholic High School Math Department
 Moore Catholic High School Math Department Geometry Vocabulary The following is a list of terms and properties which are necessary for success in a Geometry class. You will be tested on these terms during
Moore Catholic High School Math Department Geometry Vocabulary The following is a list of terms and properties which are necessary for success in a Geometry class. You will be tested on these terms during
[Me] Meisters, G. H., Polygons have ears, American Mathematical Monthly, June/July 1975, pp
![[Me] Meisters, G. H., Polygons have ears, American Mathematical Monthly, June/July 1975, pp](/thumbs/82/87020933.jpg "[Me] Meisters, G. H., Polygons have ears, American Mathematical Monthly, June/July 1975, pp") 4. Applications Meisters [Me] Two-Ears Theorem was motivated by the problem of triangulating a simple polygon. In fact Meisters suggests a greedy, but concise algorithm to achieve this goal, i.e., find
4. Applications Meisters [Me] Two-Ears Theorem was motivated by the problem of triangulating a simple polygon. In fact Meisters suggests a greedy, but concise algorithm to achieve this goal, i.e., find
Line Arrangement. Chapter 6
 Line Arrangement Chapter 6 Line Arrangement Problem: Given a set L of n lines in the plane, compute their arrangement which is a planar subdivision. Line Arrangements Problem: Given a set L of n lines
Line Arrangement Chapter 6 Line Arrangement Problem: Given a set L of n lines in the plane, compute their arrangement which is a planar subdivision. Line Arrangements Problem: Given a set L of n lines
[Ba] Bykat, A., Convex hull of a finite set of points in two dimensions, Info. Proc. Lett. 7 (1978),
![[Ba] Bykat, A., Convex hull of a finite set of points in two dimensions, Info. Proc. Lett. 7 (1978),](/thumbs/82/84755349.jpg "[Ba] Bykat, A., Convex hull of a finite set of points in two dimensions, Info. Proc. Lett. 7 (1978),") [Ba] Bykat, A., Convex hull of a finite set of points in two dimensions, Info. Proc. Lett. 7 (1978), 296-298. [Ch] [CI] [EET] [ET] [FM] [GJPT] [Gr] [HM] [KKT] Chazelle, B., A theorem on polygon cutting
[Ba] Bykat, A., Convex hull of a finite set of points in two dimensions, Info. Proc. Lett. 7 (1978), 296-298. [Ch] [CI] [EET] [ET] [FM] [GJPT] [Gr] [HM] [KKT] Chazelle, B., A theorem on polygon cutting
Ma/CS 6b Class 26: Art Galleries and Politicians
 Ma/CS 6b Class 26: Art Galleries and Politicians By Adam Sheffer The Art Gallery Problem Problem. We wish to place security cameras at a gallery, such that they cover it completely. Every camera can cover
Ma/CS 6b Class 26: Art Galleries and Politicians By Adam Sheffer The Art Gallery Problem Problem. We wish to place security cameras at a gallery, such that they cover it completely. Every camera can cover
Matching and Planarity
 Matching and Planarity Po-Shen Loh June 010 1 Warm-up 1. (Bondy 1.5.9.) There are n points in the plane such that every pair of points has distance 1. Show that there are at most n (unordered) pairs of
Matching and Planarity Po-Shen Loh June 010 1 Warm-up 1. (Bondy 1.5.9.) There are n points in the plane such that every pair of points has distance 1. Show that there are at most n (unordered) pairs of
Combinatorial Gems. Po-Shen Loh. June 2009
 Combinatorial Gems Po-Shen Loh June 2009 Although this lecture does not contain many offical Olympiad problems, the arguments which are used are all common elements of Olympiad problem solving. Some of
Combinatorial Gems Po-Shen Loh June 2009 Although this lecture does not contain many offical Olympiad problems, the arguments which are used are all common elements of Olympiad problem solving. Some of
DEFINITIONS. Perpendicular Two lines are called perpendicular if they form a right angle.
 DEFINITIONS Degree A degree is the 1 th part of a straight angle. 180 Right Angle A 90 angle is called a right angle. Perpendicular Two lines are called perpendicular if they form a right angle. Congruent
DEFINITIONS Degree A degree is the 1 th part of a straight angle. 180 Right Angle A 90 angle is called a right angle. Perpendicular Two lines are called perpendicular if they form a right angle. Congruent
The Geodesic Integral on Medial Graphs
 The Geodesic Integral on Medial Graphs Kolya Malkin August 013 We define the geodesic integral defined on paths in the duals of medial graphs on surfaces and use it to study lens elimination and connection
The Geodesic Integral on Medial Graphs Kolya Malkin August 013 We define the geodesic integral defined on paths in the duals of medial graphs on surfaces and use it to study lens elimination and connection
2-D Geometry for Programming Contests 1
 2-D Geometry for Programming Contests 1 1 Vectors A vector is defined by a direction and a magnitude. In the case of 2-D geometry, a vector can be represented as a point A = (x, y), representing the vector
2-D Geometry for Programming Contests 1 1 Vectors A vector is defined by a direction and a magnitude. In the case of 2-D geometry, a vector can be represented as a point A = (x, y), representing the vector
Polygon Triangulation. (slides partially by Daniel Vlasic )
") Polygon Triangulation (slides partially by Daniel Vlasic ) Triangulation: Definition Triangulation of a simple polygon P: decomposition of P into triangles by a maximal set of non-intersecting diagonals
Polygon Triangulation (slides partially by Daniel Vlasic ) Triangulation: Definition Triangulation of a simple polygon P: decomposition of P into triangles by a maximal set of non-intersecting diagonals
Convex Hulls in Three Dimensions. Polyhedra
 Convex Hulls in Three Dimensions Polyhedra Polyhedron 1.A polyhedron is the generalization of a 2- D polygon to 3-D A finite number of flat polygonal faces The boundary or surface of a polyhedron - Zero-dimensional
Convex Hulls in Three Dimensions Polyhedra Polyhedron 1.A polyhedron is the generalization of a 2- D polygon to 3-D A finite number of flat polygonal faces The boundary or surface of a polyhedron - Zero-dimensional
PROPERTIES OF TRIANGLES AND QUADRILATERALS (plus polygons in general)
") Mathematics Revision Guides Properties of Triangles, Quadrilaterals and Polygons Page 1 of 15 M.K. HOME TUITION Mathematics Revision Guides Level: GCSE Foundation Tier PROPERTIES OF TRIANGLES AND QUADRILATERALS
Mathematics Revision Guides Properties of Triangles, Quadrilaterals and Polygons Page 1 of 15 M.K. HOME TUITION Mathematics Revision Guides Level: GCSE Foundation Tier PROPERTIES OF TRIANGLES AND QUADRILATERALS
Art Gallery, Triangulation, and Voronoi Regions
 Art Gallery, Triangulation, and Voronoi Regions CS535 Fall 2016 Daniel G. Aliaga Department of Computer Science Purdue University [some slides based on Profs. Shmuel Wimer and Andy Mirzaian Topics Triangulation
Art Gallery, Triangulation, and Voronoi Regions CS535 Fall 2016 Daniel G. Aliaga Department of Computer Science Purdue University [some slides based on Profs. Shmuel Wimer and Andy Mirzaian Topics Triangulation
Geometry (H) Worksheet: 1st Semester Review:True/False, Always/Sometimes/Never
 Worksheet: 1st Semester Review:True/False, Always/Sometimes/Never") 1stSemesterReviewTrueFalse.nb 1 Geometry (H) Worksheet: 1st Semester Review:True/False, Always/Sometimes/Never Classify each statement as TRUE or FALSE. 1. Three given points are always coplanar. 2. A
1stSemesterReviewTrueFalse.nb 1 Geometry (H) Worksheet: 1st Semester Review:True/False, Always/Sometimes/Never Classify each statement as TRUE or FALSE. 1. Three given points are always coplanar. 2. A
MOBILE GUARDS 3.1. INTRODUCTION
 MOBILE GUARDS 3.1. INTRODUCTION In this chapter we explore an interesting variant of the art gallery problem suggested by Toussaint. Rather than modify the shape of the polygons as in the previous chapter,
MOBILE GUARDS 3.1. INTRODUCTION In this chapter we explore an interesting variant of the art gallery problem suggested by Toussaint. Rather than modify the shape of the polygons as in the previous chapter,
2 Solution of Homework
 Math 3181 Name: Dr. Franz Rothe February 6, 2014 All3181\3181_spr14h2.tex Homework has to be turned in this handout. The homework can be done in groups up to three due February 11/12 2 Solution of Homework
Math 3181 Name: Dr. Franz Rothe February 6, 2014 All3181\3181_spr14h2.tex Homework has to be turned in this handout. The homework can be done in groups up to three due February 11/12 2 Solution of Homework
6th Bay Area Mathematical Olympiad
 6th Bay Area Mathematical Olympiad February 4, 004 Problems and Solutions 1 A tiling of the plane with polygons consists of placing the polygons in the plane so that interiors of polygons do not overlap,
6th Bay Area Mathematical Olympiad February 4, 004 Problems and Solutions 1 A tiling of the plane with polygons consists of placing the polygons in the plane so that interiors of polygons do not overlap,
γ 2 γ 3 γ 1 R 2 (b) a bounded Yin set (a) an unbounded Yin set
 a bounded Yin set (a) an unbounded Yin set") γ 1 γ 3 γ γ 3 γ γ 1 R (a) an unbounded Yin set (b) a bounded Yin set Fig..1: Jordan curve representation of a connected Yin set M R. A shaded region represents M and the dashed curves its boundary M that
γ 1 γ 3 γ γ 3 γ γ 1 R (a) an unbounded Yin set (b) a bounded Yin set Fig..1: Jordan curve representation of a connected Yin set M R. A shaded region represents M and the dashed curves its boundary M that
Exercise set 2 Solutions
 Exercise set 2 Solutions Let H and H be the two components of T e and let F E(T ) consist of the edges of T with one endpoint in V (H), the other in V (H ) Since T is connected, F Furthermore, since T
Exercise set 2 Solutions Let H and H be the two components of T e and let F E(T ) consist of the edges of T with one endpoint in V (H), the other in V (H ) Since T is connected, F Furthermore, since T
Triangulation by Ear Clipping
 Triangulation by Ear Clipping David Eberly, Geometric Tools, Redmond WA 98052 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International License. To
Triangulation by Ear Clipping David Eberly, Geometric Tools, Redmond WA 98052 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International License. To
If two sides and the included angle of one triangle are congruent to two sides and the included angle of 4 Congruence
 Postulates Through any two points there is exactly one line. Through any three noncollinear points there is exactly one plane containing them. If two points lie in a plane, then the line containing those
Postulates Through any two points there is exactly one line. Through any three noncollinear points there is exactly one plane containing them. If two points lie in a plane, then the line containing those
AMS 345/CSE 355 Computational Geometry
 AMS 345/CSE 355 Computational Geometry Lecture: Polygons, Guarding Joe Mitchell Do You Like Puzzles? Come to the new Stony Brook Puzzle Society Meets: Friday 1:05-2:30 pm at CSE 2120 Organizer: Pramod
AMS 345/CSE 355 Computational Geometry Lecture: Polygons, Guarding Joe Mitchell Do You Like Puzzles? Come to the new Stony Brook Puzzle Society Meets: Friday 1:05-2:30 pm at CSE 2120 Organizer: Pramod
Caltech Harvey Mudd Mathematics Competition March 3, 2012
 Team Round Caltech Harvey Mudd Mathematics Competition March 3, 2012 1. Let a, b, c be positive integers. Suppose that (a + b)(a + c) = 77 and (a + b)(b + c) = 56. Find (a + c)(b + c). Solution: The answer
Team Round Caltech Harvey Mudd Mathematics Competition March 3, 2012 1. Let a, b, c be positive integers. Suppose that (a + b)(a + c) = 77 and (a + b)(b + c) = 56. Find (a + c)(b + c). Solution: The answer
Department: Course: Chapter 1
 Department: Course: 2016-2017 Term, Phrase, or Expression Simple Definition Chapter 1 Comprehension Support Point Line plane collinear coplanar A location in space. It does not have a size or shape The
Department: Course: 2016-2017 Term, Phrase, or Expression Simple Definition Chapter 1 Comprehension Support Point Line plane collinear coplanar A location in space. It does not have a size or shape The
Math 451: Euclidean and Non-Euclidean Geometry MWF 3pm, Gasson 204 Homework 8 Solutions
 Math 451: Euclidean and Non-Euclidean Geometry MWF 3pm, Gasson 204 Homework 8 Solutions Exercises from Chapter 2: 5.5, 5.10, 5.13, 5.14 Exercises from Chapter 3: 1.2, 1.3, 1.5 Exercise 5.5. Give an example
Math 451: Euclidean and Non-Euclidean Geometry MWF 3pm, Gasson 204 Homework 8 Solutions Exercises from Chapter 2: 5.5, 5.10, 5.13, 5.14 Exercises from Chapter 3: 1.2, 1.3, 1.5 Exercise 5.5. Give an example
Voronoi Diagrams and Delaunay Triangulations. O Rourke, Chapter 5
 Voronoi Diagrams and Delaunay Triangulations O Rourke, Chapter 5 Outline Preliminaries Properties and Applications Computing the Delaunay Triangulation Preliminaries Given a function f: R 2 R, the tangent
Voronoi Diagrams and Delaunay Triangulations O Rourke, Chapter 5 Outline Preliminaries Properties and Applications Computing the Delaunay Triangulation Preliminaries Given a function f: R 2 R, the tangent
On the perimeter of k pairwise disjoint convex bodies contained in a convex set in the plane
 On the perimeter of k pairwise disjoint convex bodies contained in a convex set in the plane Rom Pinchasi August 2, 214 Abstract We prove the following isoperimetric inequality in R 2, conjectured by Glazyrin
On the perimeter of k pairwise disjoint convex bodies contained in a convex set in the plane Rom Pinchasi August 2, 214 Abstract We prove the following isoperimetric inequality in R 2, conjectured by Glazyrin
8 Colouring Planar Graphs
 8 Colouring Planar Graphs The Four Colour Theorem Lemma 8.1 If G is a simple planar graph, then (i) 12 v V (G)(6 deg(v)) with equality for triangulations. (ii) G has a vertex of degree 5. Proof: For (i),
8 Colouring Planar Graphs The Four Colour Theorem Lemma 8.1 If G is a simple planar graph, then (i) 12 v V (G)(6 deg(v)) with equality for triangulations. (ii) G has a vertex of degree 5. Proof: For (i),
Preferred directions for resolving the non-uniqueness of Delaunay triangulations
 Preferred directions for resolving the non-uniqueness of Delaunay triangulations Christopher Dyken and Michael S. Floater Abstract: This note proposes a simple rule to determine a unique triangulation
Preferred directions for resolving the non-uniqueness of Delaunay triangulations Christopher Dyken and Michael S. Floater Abstract: This note proposes a simple rule to determine a unique triangulation
MATH 890 HOMEWORK 2 DAVID MEREDITH
 MATH 890 HOMEWORK 2 DAVID MEREDITH (1) Suppose P and Q are polyhedra. Then P Q is a polyhedron. Moreover if P and Q are polytopes then P Q is a polytope. The facets of P Q are either F Q where F is a facet
MATH 890 HOMEWORK 2 DAVID MEREDITH (1) Suppose P and Q are polyhedra. Then P Q is a polyhedron. Moreover if P and Q are polytopes then P Q is a polytope. The facets of P Q are either F Q where F is a facet
Lecture 4: Trees and Art Galleries
 Math 7H: Honors Seminar Professor: Padraic Bartlett Lecture 4: Trees and Art Galleries Week 2 UCSB 2014 1 Prelude: Graph Theory In this talk, we re going to refer frequently to things called graphs and
Math 7H: Honors Seminar Professor: Padraic Bartlett Lecture 4: Trees and Art Galleries Week 2 UCSB 2014 1 Prelude: Graph Theory In this talk, we re going to refer frequently to things called graphs and
CHAPTER 2 REVIEW COORDINATE GEOMETRY MATH Warm-Up: See Solved Homework questions. 2.2 Cartesian coordinate system
 CHAPTER 2 REVIEW COORDINATE GEOMETRY MATH6 2.1 Warm-Up: See Solved Homework questions 2.2 Cartesian coordinate system Coordinate axes: Two perpendicular lines that intersect at the origin O on each line.
CHAPTER 2 REVIEW COORDINATE GEOMETRY MATH6 2.1 Warm-Up: See Solved Homework questions 2.2 Cartesian coordinate system Coordinate axes: Two perpendicular lines that intersect at the origin O on each line.
Interactive Math Glossary Terms and Definitions
 Terms and Definitions Absolute Value the magnitude of a number, or the distance from 0 on a real number line Addend any number or quantity being added addend + addend = sum Additive Property of Area the
Terms and Definitions Absolute Value the magnitude of a number, or the distance from 0 on a real number line Addend any number or quantity being added addend + addend = sum Additive Property of Area the
Transactions in Euclidean Geometry
 Transactions in Euclidean Geometry Volume 207F Issue # 4 Table of Contents Title Author Square Construction Katherine Bertacini, Rachelle Feldmann, & Kaelyn Koontz Squares and Rectangles Rachelle Feldmann
Transactions in Euclidean Geometry Volume 207F Issue # 4 Table of Contents Title Author Square Construction Katherine Bertacini, Rachelle Feldmann, & Kaelyn Koontz Squares and Rectangles Rachelle Feldmann
Rubber bands. Chapter Rubber band representation
 Chapter 1 Rubber bands In the previous chapter, we already used the idea of looking at the graph geometrically, by placing its nodes on the line and replacing the edges by rubber bands. Since, however,
Chapter 1 Rubber bands In the previous chapter, we already used the idea of looking at the graph geometrically, by placing its nodes on the line and replacing the edges by rubber bands. Since, however,
An Approach to Geometry (stolen in part from Moise and Downs: Geometry)
") An Approach to Geometry (stolen in part from Moise and Downs: Geometry) Undefined terms: point, line, plane The rules, axioms, theorems, etc. of elementary algebra are assumed as prior knowledge, and apply
An Approach to Geometry (stolen in part from Moise and Downs: Geometry) Undefined terms: point, line, plane The rules, axioms, theorems, etc. of elementary algebra are assumed as prior knowledge, and apply
Elementary Planar Geometry
 Elementary Planar Geometry What is a geometric solid? It is the part of space occupied by a physical object. A geometric solid is separated from the surrounding space by a surface. A part of the surface
Elementary Planar Geometry What is a geometric solid? It is the part of space occupied by a physical object. A geometric solid is separated from the surrounding space by a surface. A part of the surface
Polygonal Meshes: Representing 3D Objects
 Polygonal Meshes: Representing 3D Objects Real world modeling requires representation of surfaces Two situations: 1. Model an existing object Most likely can only approximate the object Represent all (most)
Polygonal Meshes: Representing 3D Objects Real world modeling requires representation of surfaces Two situations: 1. Model an existing object Most likely can only approximate the object Represent all (most)
Problem Set 3. MATH 776, Fall 2009, Mohr. November 30, 2009
 Problem Set 3 MATH 776, Fall 009, Mohr November 30, 009 1 Problem Proposition 1.1. Adding a new edge to a maximal planar graph of order at least 6 always produces both a T K 5 and a T K 3,3 subgraph. Proof.
Problem Set 3 MATH 776, Fall 009, Mohr November 30, 009 1 Problem Proposition 1.1. Adding a new edge to a maximal planar graph of order at least 6 always produces both a T K 5 and a T K 3,3 subgraph. Proof.
Course Number: Course Title: Geometry
 Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Indiana State Math Contest Geometry
 Indiana State Math Contest 018 Geometry This test was prepared by faculty at Indiana University - Purdue University Columbus Do not open this test booklet until you have been advised to do so by the test
Indiana State Math Contest 018 Geometry This test was prepared by faculty at Indiana University - Purdue University Columbus Do not open this test booklet until you have been advised to do so by the test
Compatible Trees. 1 Introduction. Alfredo García 1 Clemens Huemer 2 Ferran Hurtado 3 Javier Tejel 1
 Compatible Trees Alfredo García 1 Clemens Huemer 2 Ferran Hurtado 3 Javier Tejel 1 Abstract Two plane geometric graphs are said to be compatible when their union is a plane geometric graph. Let S be a
Compatible Trees Alfredo García 1 Clemens Huemer 2 Ferran Hurtado 3 Javier Tejel 1 Abstract Two plane geometric graphs are said to be compatible when their union is a plane geometric graph. Let S be a
Planarity. 1 Introduction. 2 Topological Results
 Planarity 1 Introduction A notion of drawing a graph in the plane has led to some of the most deep results in graph theory. Vaguely speaking by a drawing or embedding of a graph G in the plane we mean
Planarity 1 Introduction A notion of drawing a graph in the plane has led to some of the most deep results in graph theory. Vaguely speaking by a drawing or embedding of a graph G in the plane we mean
Orthogonal art galleries with holes: a coloring proof of Aggarwal s Theorem
 Orthogonal art galleries with holes: a coloring proof of Aggarwal s Theorem Pawe l Żyliński Institute of Mathematics University of Gdańsk, 8095 Gdańsk, Poland pz@math.univ.gda.pl Submitted: Sep 9, 005;
Orthogonal art galleries with holes: a coloring proof of Aggarwal s Theorem Pawe l Żyliński Institute of Mathematics University of Gdańsk, 8095 Gdańsk, Poland pz@math.univ.gda.pl Submitted: Sep 9, 005;
Simultaneously flippable edges in triangulations
 Simultaneously flippable edges in triangulations Diane L. Souvaine 1, Csaba D. Tóth 2, and Andrew Winslow 1 1 Tufts University, Medford MA 02155, USA, {dls,awinslow}@cs.tufts.edu 2 University of Calgary,
Simultaneously flippable edges in triangulations Diane L. Souvaine 1, Csaba D. Tóth 2, and Andrew Winslow 1 1 Tufts University, Medford MA 02155, USA, {dls,awinslow}@cs.tufts.edu 2 University of Calgary,
Computational Geometry. Geometry Cross Product Convex Hull Problem Sweep Line Algorithm
 GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
 CHAPTER - 10 STRAIGHT LINES Slope or gradient of a line is defined as m = tan, ( 90 ), where is angle which the line makes with positive direction of x-axis measured in anticlockwise direction, 0 < 180
CHAPTER - 10 STRAIGHT LINES Slope or gradient of a line is defined as m = tan, ( 90 ), where is angle which the line makes with positive direction of x-axis measured in anticlockwise direction, 0 < 180
Practical Linear Algebra: A Geometry Toolbox
 Practical Linear Algebra: A Geometry Toolbox Third edition Chapter 18: Putting Lines Together: Polylines and Polygons Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book
Practical Linear Algebra: A Geometry Toolbox Third edition Chapter 18: Putting Lines Together: Polylines and Polygons Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book
Rigidity, connectivity and graph decompositions
 First Prev Next Last Rigidity, connectivity and graph decompositions Brigitte Servatius Herman Servatius Worcester Polytechnic Institute Page 1 of 100 First Prev Next Last Page 2 of 100 We say that a framework
First Prev Next Last Rigidity, connectivity and graph decompositions Brigitte Servatius Herman Servatius Worcester Polytechnic Institute Page 1 of 100 First Prev Next Last Page 2 of 100 We say that a framework
Unit 6: Connecting Algebra and Geometry Through Coordinates
 Unit 6: Connecting Algebra and Geometry Through Coordinates The focus of this unit is to have students analyze and prove geometric properties by applying algebraic concepts and skills on a coordinate plane.
Unit 6: Connecting Algebra and Geometry Through Coordinates The focus of this unit is to have students analyze and prove geometric properties by applying algebraic concepts and skills on a coordinate plane.
Motivation: Art gallery problem. Polygon decomposition. Art gallery problem: upper bound. Art gallery problem: lower bound
 CG Lecture 3 Polygon decomposition 1. Polygon triangulation Triangulation theory Monotone polygon triangulation 2. Polygon decomposition into monotone pieces 3. Trapezoidal decomposition 4. Conex decomposition
CG Lecture 3 Polygon decomposition 1. Polygon triangulation Triangulation theory Monotone polygon triangulation 2. Polygon decomposition into monotone pieces 3. Trapezoidal decomposition 4. Conex decomposition
Parallelograms. MA 341 Topics in Geometry Lecture 05
 Parallelograms MA 341 Topics in Geometry Lecture 05 Definitions A quadrilateral is a polygon with 4 distinct sides and four vertices. Is there a more precise definition? P 1 P 2 P 3 09-Sept-2011 MA 341
Parallelograms MA 341 Topics in Geometry Lecture 05 Definitions A quadrilateral is a polygon with 4 distinct sides and four vertices. Is there a more precise definition? P 1 P 2 P 3 09-Sept-2011 MA 341
Problem 3.1 (Building up geometry). For an axiomatically built-up geometry, six groups of axioms needed:
. For an axiomatically built-up geometry, six groups of axioms needed:") Math 3181 Dr. Franz Rothe September 29, 2016 All3181\3181_fall16h3.tex Names: Homework has to be turned in this handout. For extra space, use the back pages, or put blank pages between. The homework can
Math 3181 Dr. Franz Rothe September 29, 2016 All3181\3181_fall16h3.tex Names: Homework has to be turned in this handout. For extra space, use the back pages, or put blank pages between. The homework can
Computational Geometry
 Computational Geometry 600.658 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex? Convexity A set S is convex if it is the intersection of (possibly
Computational Geometry 600.658 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex? Convexity A set S is convex if it is the intersection of (possibly
Unit 1: Fundamentals of Geometry
 Name: 1 2 Unit 1: Fundamentals of Geometry Vocabulary Slope: m y x 2 2 Formulas- MUST KNOW THESE! y x 1 1 *Used to determine if lines are PARALLEL, PERPENDICULAR, OR NEITHER! Parallel Lines: SAME slopes
Name: 1 2 Unit 1: Fundamentals of Geometry Vocabulary Slope: m y x 2 2 Formulas- MUST KNOW THESE! y x 1 1 *Used to determine if lines are PARALLEL, PERPENDICULAR, OR NEITHER! Parallel Lines: SAME slopes
Geometry Reasons for Proofs Chapter 1
 Geometry Reasons for Proofs Chapter 1 Lesson 1.1 Defined Terms: Undefined Terms: Point: Line: Plane: Space: Postulate 1: Postulate : terms that are explained using undefined and/or other defined terms
Geometry Reasons for Proofs Chapter 1 Lesson 1.1 Defined Terms: Undefined Terms: Point: Line: Plane: Space: Postulate 1: Postulate : terms that are explained using undefined and/or other defined terms
Recognizing Interval Bigraphs by Forbidden Patterns
 Recognizing Interval Bigraphs by Forbidden Patterns Arash Rafiey Simon Fraser University, Vancouver, Canada, and Indiana State University, IN, USA arashr@sfu.ca, arash.rafiey@indstate.edu Abstract Let
Recognizing Interval Bigraphs by Forbidden Patterns Arash Rafiey Simon Fraser University, Vancouver, Canada, and Indiana State University, IN, USA arashr@sfu.ca, arash.rafiey@indstate.edu Abstract Let
theorems & postulates & stuff (mr. ko)
") theorems & postulates & stuff (mr. ko) postulates 1 ruler postulate The points on a line can be matched one to one with the real numbers. The real number that corresponds to a point is the coordinate of
theorems & postulates & stuff (mr. ko) postulates 1 ruler postulate The points on a line can be matched one to one with the real numbers. The real number that corresponds to a point is the coordinate of
Partitioning Orthogonal Polygons by Extension of All Edges Incident to Reflex Vertices: lower and upper bounds on the number of pieces
 Partitioning Orthogonal Polygons by Extension of All Edges Incident to Reflex Vertices: lower and upper bounds on the number of pieces António Leslie Bajuelos 1, Ana Paula Tomás and Fábio Marques 3 1 Dept.
Partitioning Orthogonal Polygons by Extension of All Edges Incident to Reflex Vertices: lower and upper bounds on the number of pieces António Leslie Bajuelos 1, Ana Paula Tomás and Fábio Marques 3 1 Dept.
1 Definition of Reduction
 1 Definition of Reduction Problem A is reducible, or more technically Turing reducible, to problem B, denoted A B if there a main program M to solve problem A that lacks only a procedure to solve problem
1 Definition of Reduction Problem A is reducible, or more technically Turing reducible, to problem B, denoted A B if there a main program M to solve problem A that lacks only a procedure to solve problem
ON THE EMPTY CONVEX PARTITION OF A FINITE SET IN THE PLANE**
 Chin. Ann. of Math. 23B:(2002),87-9. ON THE EMPTY CONVEX PARTITION OF A FINITE SET IN THE PLANE** XU Changqing* DING Ren* Abstract The authors discuss the partition of a finite set of points in the plane
Chin. Ann. of Math. 23B:(2002),87-9. ON THE EMPTY CONVEX PARTITION OF A FINITE SET IN THE PLANE** XU Changqing* DING Ren* Abstract The authors discuss the partition of a finite set of points in the plane
Delaunay Triangulations. Presented by Glenn Eguchi Computational Geometry October 11, 2001
 Delaunay Triangulations Presented by Glenn Eguchi 6.838 Computational Geometry October 11, 2001 Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally
Delaunay Triangulations Presented by Glenn Eguchi 6.838 Computational Geometry October 11, 2001 Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally
CS 177 Homework 1. Julian Panetta. October 22, We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F:
 CS 177 Homework 1 Julian Panetta October, 009 1 Euler Characteristic 1.1 Polyhedral Formula We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F: V E + F = 1 First,
CS 177 Homework 1 Julian Panetta October, 009 1 Euler Characteristic 1.1 Polyhedral Formula We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F: V E + F = 1 First,
The Art Gallery Problem
 The Art Gallery Problem Imagine an art gallery whose floor plan is a simple polygon, and a guard (a point) inside the gallery. Computational Geometry [csci 3250] The Art Gallery Problem Laura Toma Bowdoin
The Art Gallery Problem Imagine an art gallery whose floor plan is a simple polygon, and a guard (a point) inside the gallery. Computational Geometry [csci 3250] The Art Gallery Problem Laura Toma Bowdoin
Basic Combinatorics. Math 40210, Section 01 Fall Homework 4 Solutions
 Basic Combinatorics Math 40210, Section 01 Fall 2012 Homework 4 Solutions 1.4.2 2: One possible implementation: Start with abcgfjiea From edge cd build, using previously unmarked edges: cdhlponminjkghc
Basic Combinatorics Math 40210, Section 01 Fall 2012 Homework 4 Solutions 1.4.2 2: One possible implementation: Start with abcgfjiea From edge cd build, using previously unmarked edges: cdhlponminjkghc
FIGURES FOR SOLUTIONS TO SELECTED EXERCISES. V : Introduction to non Euclidean geometry
 FIGURES FOR SOLUTIONS TO SELECTED EXERCISES V : Introduction to non Euclidean geometry V.1 : Facts from spherical geometry V.1.1. The objective is to show that the minor arc m does not contain a pair of
FIGURES FOR SOLUTIONS TO SELECTED EXERCISES V : Introduction to non Euclidean geometry V.1 : Facts from spherical geometry V.1.1. The objective is to show that the minor arc m does not contain a pair of
THE THIRD JTST FOR JBMO - Saudi Arabia, 2017
 THE THIRD JTST FOR JBMO - Saudi Arabia, 017 Problem 1. Let a, b, c be positive real numbers such that a + b + c = 3. Prove the inequality a(a b ) + b(b c ) + c(c a ) 0. a + b b + c c + a Problem. Find
THE THIRD JTST FOR JBMO - Saudi Arabia, 017 Problem 1. Let a, b, c be positive real numbers such that a + b + c = 3. Prove the inequality a(a b ) + b(b c ) + c(c a ) 0. a + b b + c c + a Problem. Find
Professor: Padraic Bartlett. Lecture 9: Trees and Art Galleries. Week 10 UCSB 2015
 Math 7H Professor: Padraic Bartlett Lecture 9: Trees and Art Galleries Week 10 UCSB 2015 1 Prelude: Graph Theory This talk uses the mathematical concepts of graphs from our previous class. In particular,
Math 7H Professor: Padraic Bartlett Lecture 9: Trees and Art Galleries Week 10 UCSB 2015 1 Prelude: Graph Theory This talk uses the mathematical concepts of graphs from our previous class. In particular,
Partitions and Packings of Complete Geometric Graphs with Plane Spanning Double Stars and Paths
 Partitions and Packings of Complete Geometric Graphs with Plane Spanning Double Stars and Paths Master Thesis Patrick Schnider July 25, 2015 Advisors: Prof. Dr. Emo Welzl, Manuel Wettstein Department of
Partitions and Packings of Complete Geometric Graphs with Plane Spanning Double Stars and Paths Master Thesis Patrick Schnider July 25, 2015 Advisors: Prof. Dr. Emo Welzl, Manuel Wettstein Department of
Computational Geometry [csci 3250]
![Computational Geometry [csci 3250]](/thumbs/75/72526151.jpg "Computational Geometry [csci 3250]") Computational Geometry [csci 3250] Laura Toma Bowdoin College The Art Gallery Problem The Art Gallery Problem Imagine an art gallery whose floor plan is a simple polygon, and a guard (a point) inside the
Computational Geometry [csci 3250] Laura Toma Bowdoin College The Art Gallery Problem The Art Gallery Problem Imagine an art gallery whose floor plan is a simple polygon, and a guard (a point) inside the
Acute Triangulations of Polygons
 Europ. J. Combinatorics (2002) 23, 45 55 doi:10.1006/eujc.2001.0531 Available online at http://www.idealibrary.com on Acute Triangulations of Polygons H. MAEHARA We prove that every n-gon can be triangulated
Europ. J. Combinatorics (2002) 23, 45 55 doi:10.1006/eujc.2001.0531 Available online at http://www.idealibrary.com on Acute Triangulations of Polygons H. MAEHARA We prove that every n-gon can be triangulated
Betweenness and the Crossbar Theorem. Lemma: Let A, B, and C be distinct points. If A*B*C, then neither A*C*B nor B*A*C.
 Betweenness and the Crossbar Theorem Lemma: Let A, B, and C be distinct points. If A*B*C, then neither A*C*B nor B*A*C. Suppose that both A*B*C and A*C*B. Thus AB+BC =AC, and AC +CB = AB. From this we
Betweenness and the Crossbar Theorem Lemma: Let A, B, and C be distinct points. If A*B*C, then neither A*C*B nor B*A*C. Suppose that both A*B*C and A*C*B. Thus AB+BC =AC, and AC +CB = AB. From this we
Discrete Mathematics I So Practice Sheet Solutions 1
 Discrete Mathematics I So 2016 Tibor Szabó Shagnik Das Practice Sheet Solutions 1 Provided below are possible solutions to the questions from the practice sheet issued towards the end of the course. Exercise
Discrete Mathematics I So 2016 Tibor Szabó Shagnik Das Practice Sheet Solutions 1 Provided below are possible solutions to the questions from the practice sheet issued towards the end of the course. Exercise
Geometry Midterm Review
 Geometry Midterm Review **Look at Study Guide and old tests The Midterm covers: Chapter 1 Chapter 2 Chapter 3 Chapter 4 Chapter 5 Parts of Chapter 6 Chapter 1 1.1 point: - has no dimension - represented
Geometry Midterm Review **Look at Study Guide and old tests The Midterm covers: Chapter 1 Chapter 2 Chapter 3 Chapter 4 Chapter 5 Parts of Chapter 6 Chapter 1 1.1 point: - has no dimension - represented
1. A statement is a set of words and/or symbols that collectively make a claim that can be classified as true or false.
 Chapter 1 Line and Angle Relationships 1.1 Sets, Statements and Reasoning Definitions 1. A statement is a set of words and/or symbols that collectively make a claim that can be classified as true or false.
Chapter 1 Line and Angle Relationships 1.1 Sets, Statements and Reasoning Definitions 1. A statement is a set of words and/or symbols that collectively make a claim that can be classified as true or false.
Chapter 8. Voronoi Diagrams. 8.1 Post Oce Problem
 Chapter 8 Voronoi Diagrams 8.1 Post Oce Problem Suppose there are n post oces p 1,... p n in a city. Someone who is located at a position q within the city would like to know which post oce is closest
Chapter 8 Voronoi Diagrams 8.1 Post Oce Problem Suppose there are n post oces p 1,... p n in a city. Someone who is located at a position q within the city would like to know which post oce is closest
2017 SOLUTIONS (PRELIMINARY VERSION)
") SIMON MARAIS MATHEMATICS COMPETITION 07 SOLUTIONS (PRELIMINARY VERSION) This document will be updated to include alternative solutions provided by contestants, after the competition has been mared. Problem
SIMON MARAIS MATHEMATICS COMPETITION 07 SOLUTIONS (PRELIMINARY VERSION) This document will be updated to include alternative solutions provided by contestants, after the competition has been mared. Problem
Videos, Constructions, Definitions, Postulates, Theorems, and Properties
 Videos, Constructions, Definitions, Postulates, Theorems, and Properties Videos Proof Overview: http://tinyurl.com/riehlproof Modules 9 and 10: http://tinyurl.com/riehlproof2 Module 9 Review: http://tinyurl.com/module9livelesson-recording
Videos, Constructions, Definitions, Postulates, Theorems, and Properties Videos Proof Overview: http://tinyurl.com/riehlproof Modules 9 and 10: http://tinyurl.com/riehlproof2 Module 9 Review: http://tinyurl.com/module9livelesson-recording