Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration
|
|
|
- Dylan Andrews
- 6 years ago
- Views:
Transcription

1 Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems




2 Robot Competitions Provide common test bed for benchmarking Promote exchange of ideas Foster robotics research DARPA Robotics Challenge DLR SpaceBot Cup Amazon Picking Challenge 2


3 Since 2006 Focus on applications in domestic environments and on human-robot interaction Goal: Develop robots that support humans in everyday tasks Competition: Predefined tests Follow a person Find and put away objects Fetch drinks Understand complex speech commands Open demonstrations Bar is raised every year 3


4 Our Domestic Service Robots Dynamaid Cosero Size: cm, weight: kg 36 articulated joints PC, laser scanners, Kinect, microphone, 4

5 Final

 Flexible grasping of many")

6 Analysis of Table-top Scenes and Grasp Planning Detection of clusters above horizontal plane Two grasps (top, side) Flexible grasping of many unknown objects [Stückler, Steffens, Holz, Behnke, Robotics and Autonomous Systems 2012] 6

7 RoboCup 2013 Eindhoven 7


8 Picking-up Objects from the Floor 8







9 Object Recognition and Pose Estimation Rendering canonical views [RGB-D Objects] Pretrained convolutional neural network Linear SVM / SV regression Angular error in [Schwarz, Schulz, Behnke, ICRA 2015] 9




![Representation 2013]](/docs-images/74/70241549/images/10-5.jpg "Real-time")
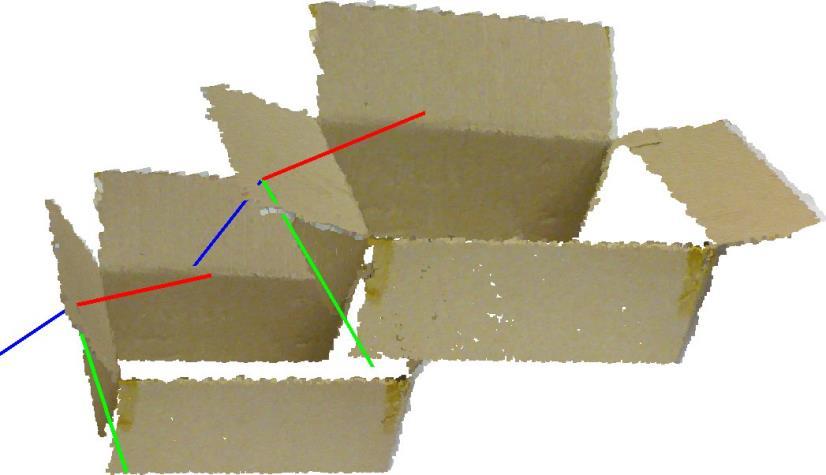
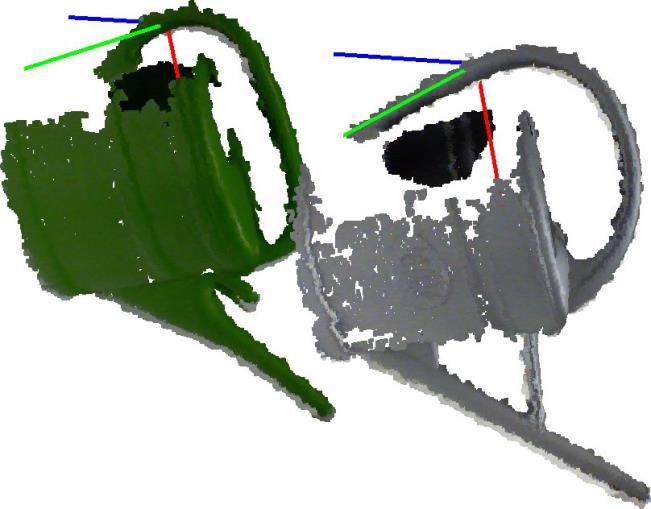
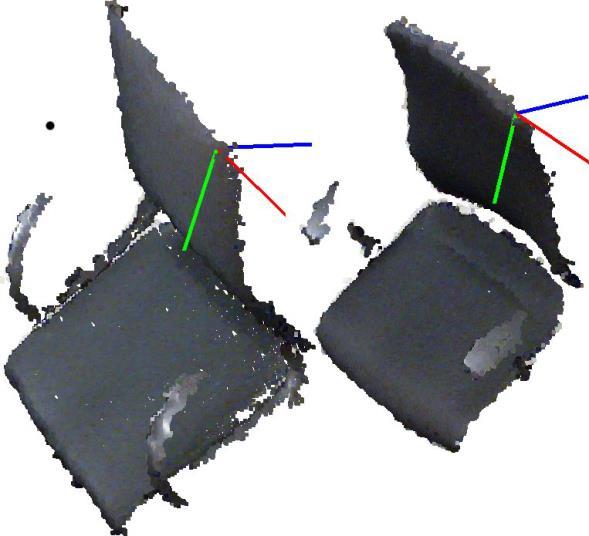
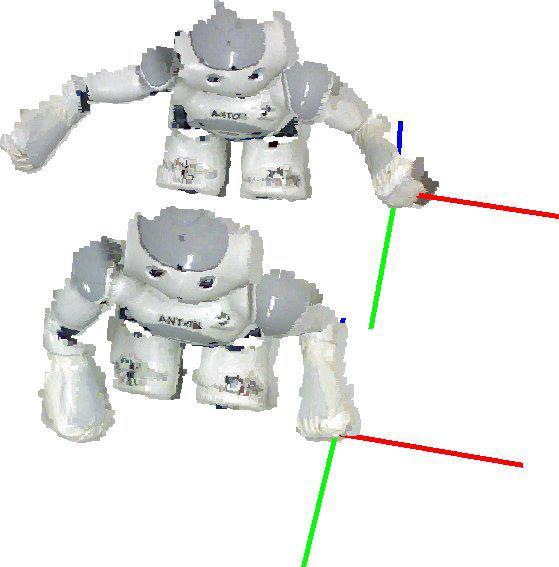
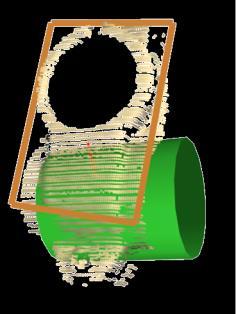
10 Learning and Tracking Object Models Modeling of objects by RGB-D SLAM [Stückler, Behnke: Journal of Visual Communication and Image Representation 2013] Real-time registration with current RGB-D image 10


![Song, PAMI 2010]](/docs-images/74/70241549/images/11-2.jpg "Multiresolution Surfel")

11 Deformable RGB-D Registration Based on Coherent Point Drift method [Myronenko & Song, PAMI 2010] Multiresolution Surfel Map allows real-time registration [Stückler, Behnke, ICRA2014] 11
12 Transformation of Poses on Object Derived from the deformation field 12
13 Grasp & Motion Skill Transfer Demonstration at RoboCup




14 Tool use: Bottle Opener Tool tip perception Extension of arm kinematics Perception of crown cap Motion adaptation 14


15 Picking Sausage, Bimanual Transport Perception of tool tip and sausage Alignment with main axis of sausage Our team NimbRo won the League in three consecutive years 15











16 Bin Picking Known objects in transport box Matching of graphs of 2D and 3D shape primitives 3D 2D Grasp and motion planning Offline Online [Nieuwenhuisen et al.: ICRA 2013] 16


17 Kitting of Automotive Parts Many car variants Collect the parts needed for the assembly of a particular car in a kit Parts in different variants are available in a supermarket Robot needs to navigate to the transport boxes, grasp the parts, and place them in the kit 17v
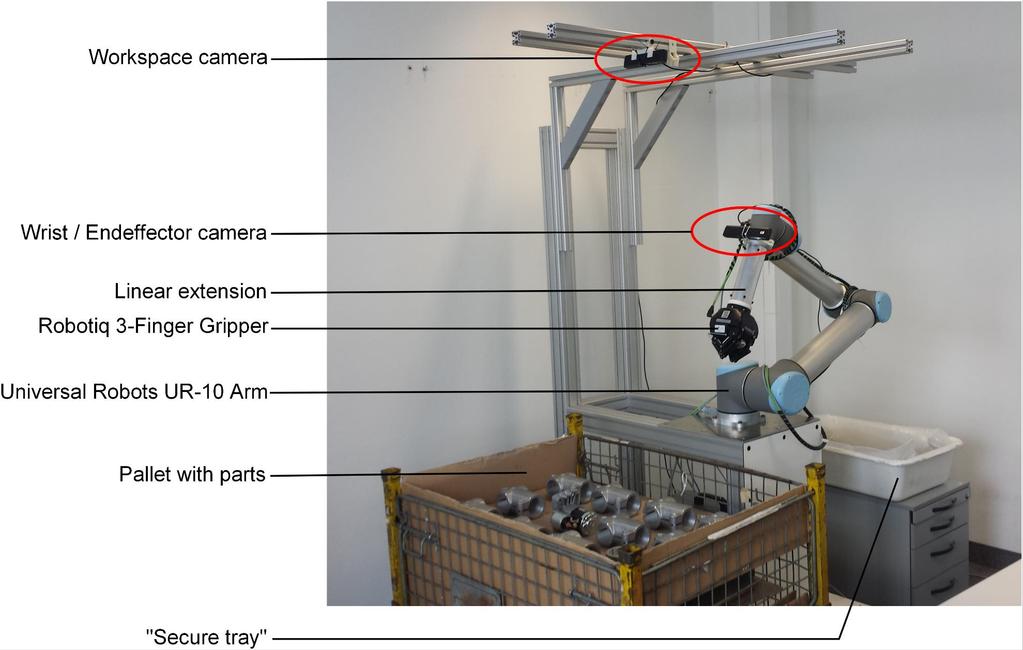
18 Lab Demonstrator 18

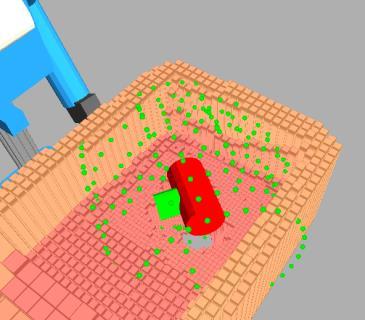
19 Object Candidate Detection Using work space RGB-D camera Initial pose of transport box roughly known Detect dominant horizontal plane above ground Cluster points above support plane Estimate main axes 19

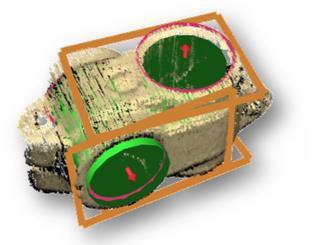
20 Object View Registration Wrist RGB-D camera moved above innermost object candidate Object views are represented as Multiresolution Surfel Map Registration of object view with current measurements using soft assignments Verification based on registration quality 20

21 Registered Object Model Registration yields the object pose 21

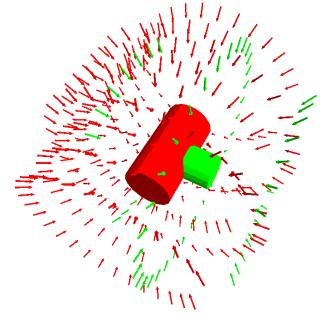
22 Grasp Definition GUI for object model acquisition and grasp definition, relative to object model Grasp pose Detected object pose 22

23 Grasp Selection Grasps are selected according to object pose 23

24 Part Detection and Grasping 24

25 Motion Planning Use ROS MoveIt for motion planning and execution Predefined poses (initial, placement) and grid of poses above the objects Preplanned paths Only short trajectories must be planned online 25

26 Concatenation of Motion Segments Interpolation for smooth segment transitions 26

27 Depalletizing of Starters 27


28 Depalletizing Results: 10 Runs Total time Component times and success rates 28

29 Integrated Mobile Manipulation Robot Initialization Part detection Approach Grasping Placing [Holz et al., ETFA 2015] 29


30 DARPA Robotics Challenge Tasks: Mobile manipulation robot Momaro [Schwarz Behnke, ICRA 2016; Rodehutskors et. al., Humanoids 2015] 30


31 Momaro Arm Design Seven Robotis Dynamixel Pro actuators Shoulder roll & pitch 2x 44.2 Nm, yaw 25 Nm Elbow 24.8 Nm Wrist roll & pitch 6.3 Nm, yaw 1.4 Nm Four fingers with two Dynamixel actuators Proximal 8.4 Nm, distal 6.0 Nm Bump for pushing tool trigger 31




32 Manipulation Operator Interface 3D headmounted display 3D environment model + images 6D magnetic tracker [Rodehutskors et al., Humanoids 2015] 32

33 Door Opening at DRC 33




34 Valve Turning Interface Align wheel model with 3D points using interactive marker Turning motion primitive 34

35 Valve Turning at DRC DRC Team NimbRo Rescue: Mobile Manipulation Robot Momaro 35



36 Surprise Tasks Direct control of manipulation Open a cabinet and push a button Operate an electric switch Pull a plug and insert it into another socket 36

37 Operating a Switch at DRC 37

38 Plug Task at DRC 38

39 Cutting Drywall at DRC 39
, solved seven of eight tasks in 34 minutes")
40 Team NimbRo Rescue Best European Team (4 th place overall), solved seven of eight tasks in 34 minutes 40



41 Hose Connecting Task Bimanual task Grab the left hose with the left gripper, Grab the right hose with the right gripper, and Connect both hoses 10/11 trials successful Execution time [Rodehutskors et al., Humanoids 2015] 41

42 DLR SpaceBot Camp





43 Autonomous Mission Execution 3D Mapping & Localization Object perception Mission plan Navigation plan Grasping [Schwarz et al., Frontiers in Robotics and AI 2016] 43



44 Amazon Picking Challenge 2016 Large variety of objects Different properties Transparent Shiny Deformable Heavy Stowing task Picking task 44


45 System Air velocity sensor UR 10 Arm (6 DOF) 2x Intel RealSense SR300 + LED light Bendable suction finger Total: 6+2 DOF Suction strength control Strong vacuum cleaner (3100 W) 45


46 RGB-D Cameras 2x Intel RealSense SR300 Fusion of three depth estimates per pixel (including RGB stereo) 46

47 Object Detection [Adapted from Johnson et al. CVPR 2016] 47



48 Example Detections Gloves Glue sticks Sippy cup 48


49 Semantic Segmentation Deep Convolutional Neural Network RGB Result HHA [Husain et al. RA-L 2016] 49



50 Combined Detection and Segmentation Pixel-wise multiplication DenseCap Detection Detection Segmentation x CNN Segmentation 50


51 Grasp Pose Selection Center grasp for standing objects: Find support area for suction close to bounding box center Top grasp for lying objects: Find support area for suction close to horizontal bounding box center 51

52 Example Stowing Top Grasp 52

53 Example Picking Grasps 53




54 6D Pose Estimation Capture item on turn table Build 3D model Generate proposals Register to test image [Aldoma et al., ICRA 2013] 54





55 Tricky Items Heavy / Large Many holes / Meshes Grasp one ball Ensure that grasp is on center of mass! Knock over and suck on bottom 55

56 Grasping the Pencil Cup 56

57 Team NimbRo Picking 2 nd place stowing, 3 rd place picking 57

58 Conclusion Developed methods for manipulating objects and tool use in Domestic service, Industrial automation, Search and rescue, and Space exploration Challenges Variability of objects Space restrictions Task constraints Need for further research Gripper design Perception Grasp planning Learning 58
59 Thanks for your attention! Questions? 59
Semantic RGB-D Perception for Cognitive Robots
 Semantic RGB-D Perception for Cognitive Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Domestic Service Robots Dynamaid Cosero Size: 100-180 cm, weight: 30-35 kg 36
Semantic RGB-D Perception for Cognitive Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Domestic Service Robots Dynamaid Cosero Size: 100-180 cm, weight: 30-35 kg 36
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Visual Perception for Robots
 Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments
 3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems
Active Recognition and Manipulation of Simple Parts Exploiting 3D Information
 experiment ActReMa Active Recognition and Manipulation of Simple Parts Exploiting 3D Information Experiment Partners: Rheinische Friedrich-Wilhelms-Universität Bonn Metronom Automation GmbH Experiment
experiment ActReMa Active Recognition and Manipulation of Simple Parts Exploiting 3D Information Experiment Partners: Rheinische Friedrich-Wilhelms-Universität Bonn Metronom Automation GmbH Experiment
Module 1 : Introduction to robotics. Lecture 3 : Industrial Manipulators & AGVs. Objectives. History of robots : Main bodies and wrists
 Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Ceilbot vision and mapping system
 Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Ceilbot vision and mapping system Provide depth and camera data from the robot's environment Keep a map of the environment based on the received data Keep track of the robot's location on the map Recognize
Continuous Motion Planning for Service Robots with Multiresolution in Time
 Continuous Motion Planning for Service Robots with Multiresolution in Time Ricarda Steffens, Matthias Nieuwenhuisen, and Sven Behnke Autonomous Intelligent Systems Group, Institute for Computer Science
Continuous Motion Planning for Service Robots with Multiresolution in Time Ricarda Steffens, Matthias Nieuwenhuisen, and Sven Behnke Autonomous Intelligent Systems Group, Institute for Computer Science
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Team Description Paper Team AutonOHM
 Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
Object Classification in Domestic Environments
 Object Classification in Domestic Environments Markus Vincze Aitor Aldoma, Markus Bader, Peter Einramhof, David Fischinger, Andreas Huber, Lara Lammer, Thomas Mörwald, Sven Olufs, Ekaterina Potapova, Johann
Object Classification in Domestic Environments Markus Vincze Aitor Aldoma, Markus Bader, Peter Einramhof, David Fischinger, Andreas Huber, Lara Lammer, Thomas Mörwald, Sven Olufs, Ekaterina Potapova, Johann
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Tech United 2016 Team Description Paper
 Tech United Eindhoven @Home 2016 Team Description Paper J.J.M. Lunenburg, S. van den Dries, R.P.W. Appeldoorn, R.W.J. Wijnands, T.T.G. Clephas, M.J.J. Baeten, L. van Beek, R.A. Ottervanger, L.F. Bento
Tech United Eindhoven @Home 2016 Team Description Paper J.J.M. Lunenburg, S. van den Dries, R.P.W. Appeldoorn, R.W.J. Wijnands, T.T.G. Clephas, M.J.J. Baeten, L. van Beek, R.A. Ottervanger, L.F. Bento
Humanoid Manipulation
 Humanoid Manipulation Tamim Asfour Institute for Anthropomatics, Computer Science Department, Humanoids and Intelligence Systems Lab (Prof. Dillmann) wwwiaim.ira.uka.de www.sfb588.uni-karlsruhe.de KIT
Humanoid Manipulation Tamim Asfour Institute for Anthropomatics, Computer Science Department, Humanoids and Intelligence Systems Lab (Prof. Dillmann) wwwiaim.ira.uka.de www.sfb588.uni-karlsruhe.de KIT
LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup
 FZI RESEARCH CENTER FOR INFORMATION TECHNOLOGY LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup ASTRA 2015, ESA/ESTEC, Noordwijk 12. Mai 2015 Outline SpaceBot
FZI RESEARCH CENTER FOR INFORMATION TECHNOLOGY LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup ASTRA 2015, ESA/ESTEC, Noordwijk 12. Mai 2015 Outline SpaceBot
Technology portfolio Robotics and automation June 2018
 Technology portfolio Robotics and automation June 2018 www.mil-as.no // post@mil-as.no Humanoids Softbank Robotics Nao (MILdred and HaMILton) Height: 58 cm Number of axis: 20 PC Connection: Bluetooth Ethernet
Technology portfolio Robotics and automation June 2018 www.mil-as.no // post@mil-as.no Humanoids Softbank Robotics Nao (MILdred and HaMILton) Height: 58 cm Number of axis: 20 PC Connection: Bluetooth Ethernet
Deliverable D6.1 CENTAURO Manipulation Concept
 Ref. Ares(2015)4031830-30/09/2015 The EU Framework Programme for Research and Innovation H2020 Research and Innovation Action Deliverable D6.1 CENTAURO Manipulation Concept Dissemination Level: Public
Ref. Ares(2015)4031830-30/09/2015 The EU Framework Programme for Research and Innovation H2020 Research and Innovation Action Deliverable D6.1 CENTAURO Manipulation Concept Dissemination Level: Public
CARE-O-BOT-RESEARCH: PROVIDING ROBUST ROBOTICS HARDWARE TO AN OPEN SOURCE COMMUNITY
 CARE-O-BOT-RESEARCH: PROVIDING ROBUST ROBOTICS HARDWARE TO AN OPEN SOURCE COMMUNITY Dipl.-Ing. Florian Weißhardt Fraunhofer Institute for Manufacturing Engineering and Automation IPA Outline Objective
CARE-O-BOT-RESEARCH: PROVIDING ROBUST ROBOTICS HARDWARE TO AN OPEN SOURCE COMMUNITY Dipl.-Ing. Florian Weißhardt Fraunhofer Institute for Manufacturing Engineering and Automation IPA Outline Objective
CMU Amazon Picking Challenge
 CMU Amazon Picking Challenge Team Harp (Human Assistive Robot Picker) Graduate Developers Abhishek Bhatia Alex Brinkman Lekha Walajapet Feroza Naina Rick Shanor Search Based Planning Lab Maxim Likhachev
CMU Amazon Picking Challenge Team Harp (Human Assistive Robot Picker) Graduate Developers Abhishek Bhatia Alex Brinkman Lekha Walajapet Feroza Naina Rick Shanor Search Based Planning Lab Maxim Likhachev
Mechanical structure of a robot=skeleton of human body Study of structure of a robot=physical structure of the manipulator structure
 UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
What is a Manipulator? 2007 RoboJackets TE Sessions 10/16/2007. Keys to Understanding Manipulators TE Sessions Manipulators 10/16/07
 2007 TE Sessions Manipulators 10/16/07 www.robojackets.org Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages
2007 TE Sessions Manipulators 10/16/07 www.robojackets.org Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages
Nao Devils Dortmund. Team Description Paper for RoboCup Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann
 Nao Devils Dortmund Team Description Paper for RoboCup 2017 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Nao Devils Dortmund Team Description Paper for RoboCup 2017 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage Dr. Jürgen Sturm Agenda for Today Exploration with a single robot Coordinated
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage Dr. Jürgen Sturm Agenda for Today Exploration with a single robot Coordinated
Preface...vii. Printed vs PDF Versions of the Book...ix. 1. Scope of this Volume Installing the ros-by-example Code...3
 Contents Preface...vii Printed vs PDF Versions of the Book...ix 1. Scope of this Volume...1 2. Installing the ros-by-example Code...3 3. Task Execution using ROS...7 3.1 A Fake Battery Simulator...8 3.2
Contents Preface...vii Printed vs PDF Versions of the Book...ix 1. Scope of this Volume...1 2. Installing the ros-by-example Code...3 3. Task Execution using ROS...7 3.1 A Fake Battery Simulator...8 3.2
Fast Object Learning and Dual-arm Coordination for Cluttered Stowing, Picking, and Packing
 Fast Object Learning and Dual-arm Coordination for Cluttered Stowing, Picking, and Packing Max Schwarz, Christian Lenz, Germán Martín García, Seongyong Koo, Arul Selvam Periyasamy, Michael Schreiber, and
Fast Object Learning and Dual-arm Coordination for Cluttered Stowing, Picking, and Packing Max Schwarz, Christian Lenz, Germán Martín García, Seongyong Koo, Arul Selvam Periyasamy, Michael Schreiber, and
Advanced Vision Guided Robotics. David Bruce Engineering Manager FANUC America Corporation
 Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Data-driven Approaches to Simulation (Motion Capture)
") 1 Data-driven Approaches to Simulation (Motion Capture) Ting-Chun Sun tingchun.sun@usc.edu Preface The lecture slides [1] are made by Jessica Hodgins [2], who is a professor in Computer Science Department
1 Data-driven Approaches to Simulation (Motion Capture) Ting-Chun Sun tingchun.sun@usc.edu Preface The lecture slides [1] are made by Jessica Hodgins [2], who is a professor in Computer Science Department
Ch 8 Industrial Robotics
 Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
Continuous Motion Planning for Domestic Service Robots with Multiresolution in Time
 DEPARTMENT OF COMPUTER SCIENCE VI AUTONOMOUS INTELLIGENT SYSTEMS UNIVERSITY OF BONN Master Thesis Continuous Motion Planning for Domestic Service Robots with Multiresolution in Time Ricarda Steffens Primary
DEPARTMENT OF COMPUTER SCIENCE VI AUTONOMOUS INTELLIGENT SYSTEMS UNIVERSITY OF BONN Master Thesis Continuous Motion Planning for Domestic Service Robots with Multiresolution in Time Ricarda Steffens Primary
Modeling the Virtual World
 Modeling the Virtual World Joaquim Madeira November, 2013 RVA - 2013/2014 1 A VR system architecture Modeling the Virtual World Geometry Physics Haptics VR Toolkits RVA - 2013/2014 2 VR object modeling
Modeling the Virtual World Joaquim Madeira November, 2013 RVA - 2013/2014 1 A VR system architecture Modeling the Virtual World Geometry Physics Haptics VR Toolkits RVA - 2013/2014 2 VR object modeling
Equipment use workshop How to use the sweet-pepper harvester
 Equipment use workshop How to use the sweet-pepper harvester Jochen Hemming (Wageningen UR) September-2014 Working environment robot Environmental conditions Temperature: 13 to 35 C Relative Humidity:
Equipment use workshop How to use the sweet-pepper harvester Jochen Hemming (Wageningen UR) September-2014 Working environment robot Environmental conditions Temperature: 13 to 35 C Relative Humidity:
Robotics. Haslum COMP3620/6320
 Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
Robotics P@trik Haslum COMP3620/6320 Introduction Robotics Industrial Automation * Repetitive manipulation tasks (assembly, etc). * Well-known, controlled environment. * High-power, high-precision, very
Super Assembling Arms
 Super Assembling Arms Yun Jiang, Nan Xiao, and Hanpin Yan {yj229, nx27, hy95}@cornell.edu Abstract Although there are more and more things personal robots can do for us at home, they are unable to accomplish
Super Assembling Arms Yun Jiang, Nan Xiao, and Hanpin Yan {yj229, nx27, hy95}@cornell.edu Abstract Although there are more and more things personal robots can do for us at home, they are unable to accomplish
Final Project Report: Mobile Pick and Place
 Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots
 15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
arxiv: v1 [cs.ro] 11 Jul 2016
![arxiv: v1 [cs.ro] 11 Jul 2016](/thumbs/76/73190720.jpg "arxiv: v1 [cs.ro] 11 Jul 2016") Initial Experiments on Learning-Based Randomized Bin-Picking Allowing Finger Contact with Neighboring Objects Kensuke Harada, Weiwei Wan, Tokuo Tsuji, Kohei Kikuchi, Kazuyuki Nagata, and Hiromu Onda arxiv:1607.02867v1
Initial Experiments on Learning-Based Randomized Bin-Picking Allowing Finger Contact with Neighboring Objects Kensuke Harada, Weiwei Wan, Tokuo Tsuji, Kohei Kikuchi, Kazuyuki Nagata, and Hiromu Onda arxiv:1607.02867v1
CS283: Robotics Fall 2016: Sensors
 CS283: Robotics Fall 2016: Sensors Sören Schwertfeger / 师泽仁 ShanghaiTech University Robotics ShanghaiTech University - SIST - 23.09.2016 2 REVIEW TRANSFORMS Robotics ShanghaiTech University - SIST - 23.09.2016
CS283: Robotics Fall 2016: Sensors Sören Schwertfeger / 师泽仁 ShanghaiTech University Robotics ShanghaiTech University - SIST - 23.09.2016 2 REVIEW TRANSFORMS Robotics ShanghaiTech University - SIST - 23.09.2016
Small Object Manipulation in 3D Perception Robotic Systems Using Visual Servoing
 Small Object Manipulation in 3D Perception Robotic Systems Using Visual Servoing Camilo Perez Quintero, Oscar Ramirez, Mona Gridseth and Martin Jägersand* Abstract Robot manipulation has benefited from
Small Object Manipulation in 3D Perception Robotic Systems Using Visual Servoing Camilo Perez Quintero, Oscar Ramirez, Mona Gridseth and Martin Jägersand* Abstract Robot manipulation has benefited from
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Supervised Autonomous Locomotion and Manipulation for Disaster Response with a Centaur-like Robot
 Supervised Autonomous Locomotion and Manipulation for Disaster Response with a Centaur-like Robot Tobias Klamt, Diego Rodriguez, Max Schwarz, Christian Lenz, Dmytro Pavlichenko, David Droeschel, and Sven
Supervised Autonomous Locomotion and Manipulation for Disaster Response with a Centaur-like Robot Tobias Klamt, Diego Rodriguez, Max Schwarz, Christian Lenz, Dmytro Pavlichenko, David Droeschel, and Sven
ROBOT SENSORS. 1. Proprioceptors
 ROBOT SENSORS Since the action capability is physically interacting with the environment, two types of sensors have to be used in any robotic system: - proprioceptors for the measurement of the robot s
ROBOT SENSORS Since the action capability is physically interacting with the environment, two types of sensors have to be used in any robotic system: - proprioceptors for the measurement of the robot s
Designing a Pick and Place Robotics Application Using MATLAB and Simulink
 Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots
 A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
Keywords: clustering, construction, machine vision
 CS4758: Robot Construction Worker Alycia Gailey, biomedical engineering, graduate student: asg47@cornell.edu Alex Slover, computer science, junior: ais46@cornell.edu Abstract: Progress has been made in
CS4758: Robot Construction Worker Alycia Gailey, biomedical engineering, graduate student: asg47@cornell.edu Alex Slover, computer science, junior: ais46@cornell.edu Abstract: Progress has been made in
Scanning and Printing Objects in 3D Jürgen Sturm
 Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
ToBI - Team of Bielefeld: The Human-Robot Interaction System for 2011
 ToBI - Team of Bielefeld: The Human-Robot Interaction System for RoboCup@Home 2011 Sven Wachsmuth, Frederic Siepmann, Leon Ziegler, Florian Lier Faculty of Technology, Bielefeld University, Universitätstraße
ToBI - Team of Bielefeld: The Human-Robot Interaction System for RoboCup@Home 2011 Sven Wachsmuth, Frederic Siepmann, Leon Ziegler, Florian Lier Faculty of Technology, Bielefeld University, Universitätstraße
Grasping Known Objects with Aldebaran Nao
 CS365 Project Report Grasping Known Objects with Aldebaran Nao By: Ashu Gupta( ashug@iitk.ac.in) Mohd. Dawood( mdawood@iitk.ac.in) Department of Computer Science and Engineering IIT Kanpur Mentor: Prof.
CS365 Project Report Grasping Known Objects with Aldebaran Nao By: Ashu Gupta( ashug@iitk.ac.in) Mohd. Dawood( mdawood@iitk.ac.in) Department of Computer Science and Engineering IIT Kanpur Mentor: Prof.
Team Description Paper
 AUT @Home 2014 Team Description Paper Ameneh Sheikhjafari, Shaghayegh Gharghabi, Ismile Mehrabi, Marzieh Kariminoori, kourosh Sartipi, Alireza Sheikhjafari, Edwin Babaians, Sara Jahangiri, Ramin Gomari
AUT @Home 2014 Team Description Paper Ameneh Sheikhjafari, Shaghayegh Gharghabi, Ismile Mehrabi, Marzieh Kariminoori, kourosh Sartipi, Alireza Sheikhjafari, Edwin Babaians, Sara Jahangiri, Ramin Gomari
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017
 Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
ACE Project Report. December 10, Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University
 ACE Project Report December 10, 2007 Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University 1. Introduction This report covers the period from September 20, 2007 through December 10,
ACE Project Report December 10, 2007 Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University 1. Introduction This report covers the period from September 20, 2007 through December 10,
Structural Configurations of Manipulators
 Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Control Approaches for Walking and Running
 DLR.de Chart 1 > Humanoids 2015 > Christian Ott > 02.11.2015 Control Approaches for Walking and Running Christian Ott, Johannes Englsberger German Aerospace Center (DLR) DLR.de Chart 2 > Humanoids 2015
DLR.de Chart 1 > Humanoids 2015 > Christian Ott > 02.11.2015 Control Approaches for Walking and Running Christian Ott, Johannes Englsberger German Aerospace Center (DLR) DLR.de Chart 2 > Humanoids 2015
Assignment 3. Position of the center +/- 0.1 inches Orientation +/- 1 degree. Decal, marker Stereo, matching algorithms Pose estimation
 Assignment 3 1. You are required to analyze the feasibility of designing a vision system for the robot gas station attendant. Assume that the driver parks the car so that the flap and the cap are in a
Assignment 3 1. You are required to analyze the feasibility of designing a vision system for the robot gas station attendant. Assume that the driver parks the car so that the flap and the cap are in a
Developing Algorithms for Robotics and Autonomous Systems
 Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Human Arm Simulation Using Kinect
 Human Arm Simulation Using Kinect Nikunj Agarwal 1, Priya Bajaj 2, Jayesh Pal 3, Piyush Kushwaha 4 1,2,3,4 Student, Computer Science & Engineering Department, IMS Engineering College, Ghaziabad, Uttar
Human Arm Simulation Using Kinect Nikunj Agarwal 1, Priya Bajaj 2, Jayesh Pal 3, Piyush Kushwaha 4 1,2,3,4 Student, Computer Science & Engineering Department, IMS Engineering College, Ghaziabad, Uttar
Andy Project. Tushar Chugh, William Seto, Bikramjot Hanzra, Shiyu Dong, Tae-Hyung Kim. The Robotics Institute Carnegie Mellon University
 Andy Project Tushar Chugh, William Seto, Bikramjot Hanzra, Shiyu Dong, Tae-Hyung Kim. The Robotics Institute Carnegie Mellon University Mentors Special thanks to our mentors - Jean Oh -- Project Scientist,
Andy Project Tushar Chugh, William Seto, Bikramjot Hanzra, Shiyu Dong, Tae-Hyung Kim. The Robotics Institute Carnegie Mellon University Mentors Special thanks to our mentors - Jean Oh -- Project Scientist,
INF Introduction to Robot Operating System
 INF3480 - Introduction to Robot Operating System February 22, 2017 Justinas Mišeikis Side Note This is an overview lecture, but do expect exam question on ROS topic also. Please pay more attention to the
INF3480 - Introduction to Robot Operating System February 22, 2017 Justinas Mišeikis Side Note This is an overview lecture, but do expect exam question on ROS topic also. Please pay more attention to the
Plymouth Humanoids Team Description Paper for RoboCup 2013
 Plymouth Humanoids Team Description Paper for RoboCup 2013 Arron Griffiths 1, Clare Simpson, Paul Eastham, Alex Smith, Guido Bugmann, Chenguang Yang, Peter Gibbons, and Phil F. Culverhouse Centre for Robotics
Plymouth Humanoids Team Description Paper for RoboCup 2013 Arron Griffiths 1, Clare Simpson, Paul Eastham, Alex Smith, Guido Bugmann, Chenguang Yang, Peter Gibbons, and Phil F. Culverhouse Centre for Robotics
Team Description Paper
 SPQR@Work: Team Description Paper Marco Imperoli, Daniele Evangelista, Valerio Sanelli, Matteo Russo, Alberto Pretto and Daniele Nardi Department of Computer, Control, and Management Engineering Antonio
SPQR@Work: Team Description Paper Marco Imperoli, Daniele Evangelista, Valerio Sanelli, Matteo Russo, Alberto Pretto and Daniele Nardi Department of Computer, Control, and Management Engineering Antonio
Task analysis based on observing hands and objects by vision
 Task analysis based on observing hands and objects by vision Yoshihiro SATO Keni Bernardin Hiroshi KIMURA Katsushi IKEUCHI Univ. of Electro-Communications Univ. of Karlsruhe Univ. of Tokyo Abstract In
Task analysis based on observing hands and objects by vision Yoshihiro SATO Keni Bernardin Hiroshi KIMURA Katsushi IKEUCHI Univ. of Electro-Communications Univ. of Karlsruhe Univ. of Tokyo Abstract In
ZJUCyber Team Description for ROBOCUP 2013
 ZJUCyber Team Description for ROBOCUP 2013 Rong Xiong, Junnan Wang, Zenglin Hong, Qianshan Li, Penghui Yin, Yingying Xu, Xiaokai Sun, Longbin Shen, Yue Wang, Haoyuan Pang State Key Laboratory of Industrial
ZJUCyber Team Description for ROBOCUP 2013 Rong Xiong, Junnan Wang, Zenglin Hong, Qianshan Li, Penghui Yin, Yingying Xu, Xiaokai Sun, Longbin Shen, Yue Wang, Haoyuan Pang State Key Laboratory of Industrial
Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors
 33 rd International Symposium on Automation and Robotics in Construction (ISARC 2016) Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors Kosei Ishida 1 1 School of
33 rd International Symposium on Automation and Robotics in Construction (ISARC 2016) Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors Kosei Ishida 1 1 School of
A FAST AND ACCURATE ROBOTIC GRASP METHOD USING DEEP LEARNING. A Thesis. presented to. the Faculty of the Graduate School
 A FAST AND ACCURATE ROBOTIC GRASP METHOD USING DEEP LEARNING A Thesis presented to the Faculty of the Graduate School at the University of Missouri-Columbia In Partial Fulfillment of the Requirements for
A FAST AND ACCURATE ROBOTIC GRASP METHOD USING DEEP LEARNING A Thesis presented to the Faculty of the Graduate School at the University of Missouri-Columbia In Partial Fulfillment of the Requirements for
Winning with MoveIt! Team Delft Amazon Picking Challenge. Mukunda Bharatheesha
 Winning with MoveIt! Team Delft Amazon Picking Challenge Mukunda Bharatheesha 08.10.2016 Self Introduction Stowing Challenge Picking Challenge Delft - 214 Delft 105 (00:00:30) NimbRo - 186 PFN 105 (00:01:07)
Winning with MoveIt! Team Delft Amazon Picking Challenge Mukunda Bharatheesha 08.10.2016 Self Introduction Stowing Challenge Picking Challenge Delft - 214 Delft 105 (00:00:30) NimbRo - 186 PFN 105 (00:01:07)
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
4D Crop Analysis for Plant Geometry Estimation in Precision Agriculture
 4D Crop Analysis for Plant Geometry Estimation in Precision Agriculture MIT Laboratory for Information & Decision Systems IEEE RAS TC on Agricultural Robotics and Automation Webinar #37 Acknowledgements
4D Crop Analysis for Plant Geometry Estimation in Precision Agriculture MIT Laboratory for Information & Decision Systems IEEE RAS TC on Agricultural Robotics and Automation Webinar #37 Acknowledgements
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
INTELLIGENT AUTONOMOUS SYSTEMS LAB
 Matteo Munaro 1,3, Alex Horn 2, Randy Illum 2, Jeff Burke 2, and Radu Bogdan Rusu 3 1 IAS-Lab at Department of Information Engineering, University of Padova 2 Center for Research in Engineering, Media
Matteo Munaro 1,3, Alex Horn 2, Randy Illum 2, Jeff Burke 2, and Radu Bogdan Rusu 3 1 IAS-Lab at Department of Information Engineering, University of Padova 2 Center for Research in Engineering, Media
Tech United 2018 Team Description Paper
 Tech United Eindhoven @Home 2018 Team Description Paper M.F.B. van der Burgh, J.J.M. Lunenburg, R.P.W. Appeldoorn, R.W.J. Wijnands, T.T.G. Clephas, M.J.J. Baeten, L.L.A.M. van Beek, R.A. Ottervanger, S.
Tech United Eindhoven @Home 2018 Team Description Paper M.F.B. van der Burgh, J.J.M. Lunenburg, R.P.W. Appeldoorn, R.W.J. Wijnands, T.T.G. Clephas, M.J.J. Baeten, L.L.A.M. van Beek, R.A. Ottervanger, S.
Team Description Paper
 SPQR@Work: Team Description Paper Marco Imperoli, Daniele Evangelista, Valerio Sanelli, Matteo Russo, Wilson Villa, Alberto Pretto, and Daniele Nardi Department of Computer, Control and Management Engineering
SPQR@Work: Team Description Paper Marco Imperoli, Daniele Evangelista, Valerio Sanelli, Matteo Russo, Wilson Villa, Alberto Pretto, and Daniele Nardi Department of Computer, Control and Management Engineering
Mechanical Design of a Cartesian Manipulator for Warehouse Pick and Place
 Mechanical Design of a Cartesian Manipulator for Warehouse Pick and Place M. McTaggart1,2, R. Smith1,2, J. Erskine1,2, R. Grinover1,2, A. Gurman1,2, T. Hunn1,2, N. Kelly-Boxall1,2, D. Lee1,2, A. Milan1,3,
Mechanical Design of a Cartesian Manipulator for Warehouse Pick and Place M. McTaggart1,2, R. Smith1,2, J. Erskine1,2, R. Grinover1,2, A. Gurman1,2, T. Hunn1,2, N. Kelly-Boxall1,2, D. Lee1,2, A. Milan1,3,
Members. Team Members. Advisor. Mentor. Tim Sonnen Joe Carter Marshall Townsend Brian Gift Nathan Park Kierra Ryan Qinlin Xu. Dr.
 Discover Bot 1 Members Team Members Advisor Tim Sonnen Joe Carter Marshall Townsend Brian Gift Nathan Park Kierra Ryan Qinlin Xu Dr. Joel Perry Mentor Sarah Willis 2 Project Goal To develop a single-user
Discover Bot 1 Members Team Members Advisor Tim Sonnen Joe Carter Marshall Townsend Brian Gift Nathan Park Kierra Ryan Qinlin Xu Dr. Joel Perry Mentor Sarah Willis 2 Project Goal To develop a single-user
John Hsu Nate Koenig ROSCon 2012
 John Hsu Nate Koenig ROSCon 2012 Outline What is Gazebo, and why should you use it Overview and architecture Environment modeling Robot modeling Interfaces Getting Help Simulation for Robots Towards accurate
John Hsu Nate Koenig ROSCon 2012 Outline What is Gazebo, and why should you use it Overview and architecture Environment modeling Robot modeling Interfaces Getting Help Simulation for Robots Towards accurate
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Cognitive Robotics
 04-801 Cognitive Robotics David Vernon Carnegie Mellon University Africa vernon@cmu.edu www.vernon.eu Cognitive Robotics 1 Carnegie Mellon University in Rwanda Lecture 11 Robot Arms II Example robot programming
04-801 Cognitive Robotics David Vernon Carnegie Mellon University Africa vernon@cmu.edu www.vernon.eu Cognitive Robotics 1 Carnegie Mellon University in Rwanda Lecture 11 Robot Arms II Example robot programming
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
Human Body Recognition and Tracking: How the Kinect Works. Kinect RGB-D Camera. What the Kinect Does. How Kinect Works: Overview
 Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Team NimbRo at MBZIRC 2017: Autonomous Valve Stem Turning using a Wrench
 Team NimbRo at MBZIRC 217: Autonomous Valve Stem Turning using a Wrench Max Schwarz Autonomous Intelligent Systems schwarz@ais.uni-bonn.de David Droeschel Autonomous Intelligent Systems Christian Lenz
Team NimbRo at MBZIRC 217: Autonomous Valve Stem Turning using a Wrench Max Schwarz Autonomous Intelligent Systems schwarz@ais.uni-bonn.de David Droeschel Autonomous Intelligent Systems Christian Lenz
CONTENT ENGINEERING & VISION LABORATORY. Régis Vinciguerra
 CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
CONTENT ENGINEERING & VISION LABORATORY Régis Vinciguerra regis.vinciguerra@cea.fr ALTERNATIVE ENERGIES AND ATOMIC ENERGY COMMISSION Military Applications Division (DAM) Nuclear Energy Division (DEN) Technological
Human Machine Interaction
 Human Machine Interaction XVIII BrainStorming Cordinator: L. Fortuna Tutor: P. Arena Ignazio Aleo June 09 introduction Network of systems Outlines our goals Network of systems development Robot-embodiment
Human Machine Interaction XVIII BrainStorming Cordinator: L. Fortuna Tutor: P. Arena Ignazio Aleo June 09 introduction Network of systems Outlines our goals Network of systems development Robot-embodiment
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Visual Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Experimentation, Evaluation and Benchmarking Dr. Jürgen Sturm Agenda for Today Course Evaluation Scientific research: The
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Experimentation, Evaluation and Benchmarking Dr. Jürgen Sturm Agenda for Today Course Evaluation Scientific research: The
Basilio Bona ROBOTICA 03CFIOR 1
 Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Table of Contents Introduction Historical Review of Robotic Orienting Devices Kinematic Position Analysis Instantaneous Kinematic Analysis
 Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit
 3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit 9 Toyomi Fujita and Yuya Kondo Tohoku Institute of Technology Japan 1. Introduction A 3D configuration and terrain sensing
3D Terrain Sensing System using Laser Range Finder with Arm-Type Movable Unit 9 Toyomi Fujita and Yuya Kondo Tohoku Institute of Technology Japan 1. Introduction A 3D configuration and terrain sensing
Removing Moving Objects from Point Cloud Scenes
 Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Removing Moving Objects from Point Cloud Scenes Krystof Litomisky and Bir Bhanu University of California, Riverside krystof@litomisky.com, bhanu@ee.ucr.edu Abstract. Three-dimensional simultaneous localization
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation
 Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
ArchGenTool: A System-Independent Collaborative Tool for Robotic Architecture Design
 ArchGenTool: A System-Independent Collaborative Tool for Robotic Architecture Design Emanuele Ruffaldi (SSSA) I. Kostavelis, D. Giakoumis, D. Tzovaras (CERTH) Overview Problem Statement Existing Solutions
ArchGenTool: A System-Independent Collaborative Tool for Robotic Architecture Design Emanuele Ruffaldi (SSSA) I. Kostavelis, D. Giakoumis, D. Tzovaras (CERTH) Overview Problem Statement Existing Solutions
ToBI - Team of Bielefeld: The Human-Robot Interaction System for 2013
 ToBI - Team of Bielefeld: The Human-Robot Interaction System for RoboCup@Home 2013 Leon Ziegler, Jens Wittrowski, Matthias Schöpfer, Frederic Siepmann, Sven Wachsmuth Faculty of Technology, Bielefeld University,
ToBI - Team of Bielefeld: The Human-Robot Interaction System for RoboCup@Home 2013 Leon Ziegler, Jens Wittrowski, Matthias Schöpfer, Frederic Siepmann, Sven Wachsmuth Faculty of Technology, Bielefeld University,
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis
 Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
AN EFFICIENT METHOD FOR HUMAN POINTING ESTIMATION FOR ROBOT INTERACTION. Satoshi Ueno, Sei Naito, and Tsuhan Chen
 AN EFFICIENT METHOD FOR HUMAN POINTING ESTIMATION FOR ROBOT INTERACTION Satoshi Ueno, Sei Naito, and Tsuhan Chen KDDI R&D Laboratories, Inc. Cornell University ABSTRACT In this paper, we propose an efficient
AN EFFICIENT METHOD FOR HUMAN POINTING ESTIMATION FOR ROBOT INTERACTION Satoshi Ueno, Sei Naito, and Tsuhan Chen KDDI R&D Laboratories, Inc. Cornell University ABSTRACT In this paper, we propose an efficient
ROS-Industrial Basic Developer s Training Class
 ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 4: More Advanced Topics (Descartes and Perception) Southwest Research Institute 2 MOVEIT! CONTINUED 3 Motion Planning
ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 4: More Advanced Topics (Descartes and Perception) Southwest Research Institute 2 MOVEIT! CONTINUED 3 Motion Planning
DEVELOPMENT OF TELE-ROBOTIC INTERFACE SYSTEM FOR THE HOT-LINE MAINTENANCE. Chang-Hyun Kim, Min-Soeng Kim, Ju-Jang Lee,1
 DEVELOPMENT OF TELE-ROBOTIC INTERFACE SYSTEM FOR THE HOT-LINE MAINTENANCE Chang-Hyun Kim, Min-Soeng Kim, Ju-Jang Lee,1 Dept. of Electrical Engineering and Computer Science Korea Advanced Institute of Science
DEVELOPMENT OF TELE-ROBOTIC INTERFACE SYSTEM FOR THE HOT-LINE MAINTENANCE Chang-Hyun Kim, Min-Soeng Kim, Ju-Jang Lee,1 Dept. of Electrical Engineering and Computer Science Korea Advanced Institute of Science
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
Tight Coupling between Manipulation and Perception using SLAM
 Tight Coupling between Manipulation and Perception using SLAM Benzun Pious Wisely Babu Christopher Bove Michael A. Gennert Robotics Engineering Department Worcester Polytechnic Institute Worcester, MA
Tight Coupling between Manipulation and Perception using SLAM Benzun Pious Wisely Babu Christopher Bove Michael A. Gennert Robotics Engineering Department Worcester Polytechnic Institute Worcester, MA
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The