Multiple Baseline Stereo
|
|
|
- Roderick Walters
- 6 years ago
- Views:
Transcription
1 A. Coste CS6320 3D Computer Vision, School of Computing, University of Utah April 22, 2013 A. Coste
2 Outline 1 2 Square Differences Other common metrics 3 Rectification 4 5 A. Coste
3 Introduction The goal of stereoscopy in computer vision is to explain and mimic the human visual system to give machines the ability to perceive depth and estimate it. In this project we will explore surface reconstruction based on a set of images acquired with different baselines. A. Coste
4 Outline Square Differences Other common metrics 1 2 Square Differences Other common metrics 3 Rectification 4 5 A. Coste
5 Square Differences Other common metrics In Computer Vision key issues such as Pattern Recognition Object Tracking Image Registration Movement Analysis and Video Analysis Stereo Matching can be solved by introducing similarity metrics and measurements. Reference Paper: 6 families and more than 50 metrics S. Chambon, A. Crouzil, Similarity measures for image matching despite occlusions in stereo vision, Pattern Recognition 44, pages , A. Coste
 = (I 1 (i, j) I 2 (x + i, y + j)) 2 (1) (i,j) W A.")
6 Square Differences Other common metrics The use of Sum of Square Differences is Sum of Absolute Differences SSD(i, j) = (I 1 (i, j) I 2 (x + i, y + j)) 2 (1) (i,j) W A. Coste
i 2 (x + i, y + j) (i,j) W I 1(i, j) 2 (i,j) W I 2(x + i, y + j) 2 (3) SHD(i, j) = i,j W I 1 (i, j) I 2 (x + i, y + j) (4) A.")
7 Square Differences Other common metrics Other metrics NCC(i, j) = SAD(i, j) = (i,j) W I 1 (i, j) I 2 (x + i, y + j) (2) (i,j) W I 1(i, j)i 2 (x + i, y + j) (i,j) W I 1(i, j) 2 (i,j) W I 2(x + i, y + j) 2 (3) SHD(i, j) = i,j W I 1 (i, j) I 2 (x + i, y + j) (4) A. Coste
8 Outline Rectification 1 2 Square Differences Other common metrics 3 Rectification 4 5 A. Coste

9 Rectification Rectification Optimize disparity computation by using rectified images A. Coste
10 Outline 1 2 Square Differences Other common metrics 3 Rectification 4 5 A. Coste
 A.")
11 The standard stereo model d = u u B z = d f d = fb z (5) A. Coste
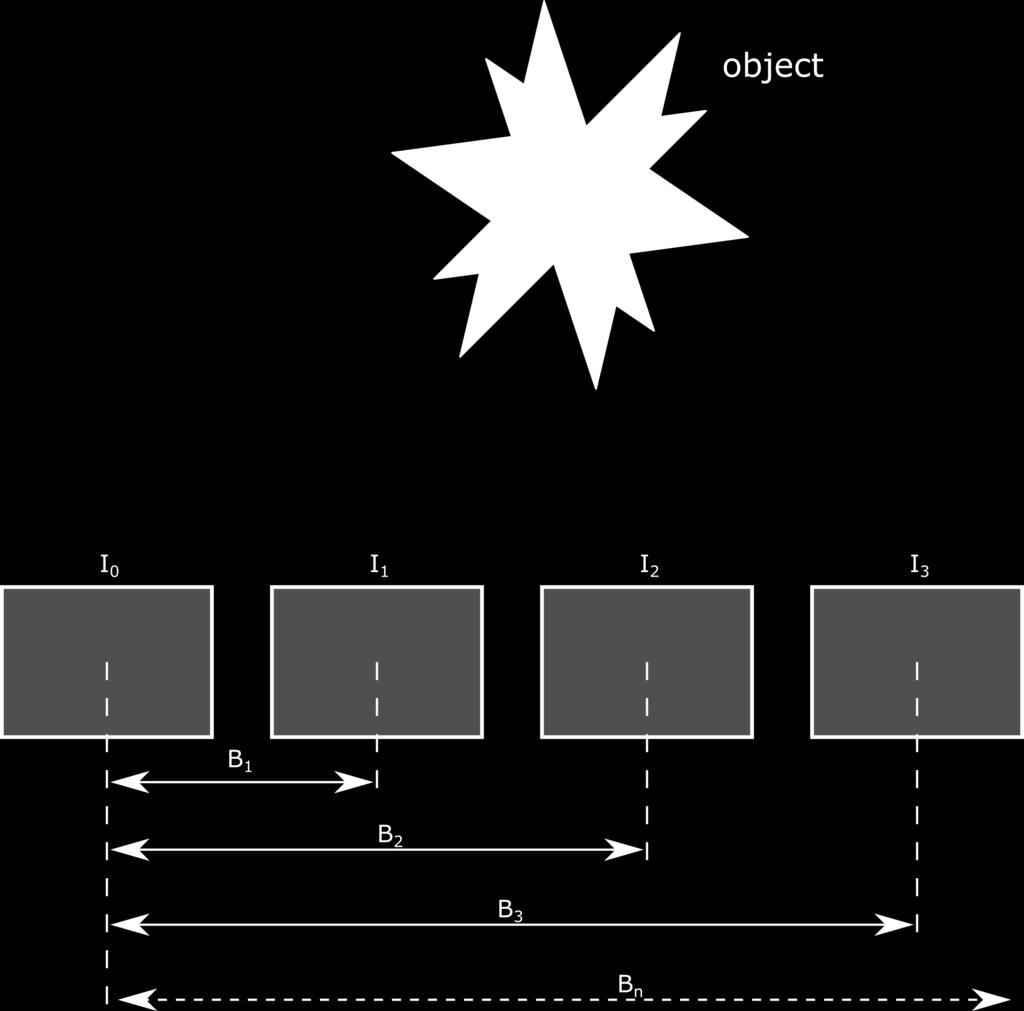
12 Introducing multiple images with multiple baselines in the general model 1 d i = fb i z = fb iζ ζ = d i (6) fb i Reference Paper M. Okutomi, T. Kanade, A, IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 15, No 4, April A. Coste
13 A. Coste

14 First data set : Theoretical repeated pattern : large number of ambiguities Figure: Synthetic images of the data set Figure: Associated disparity maps A. Coste
15 Ambiguity resolution Figure: SSD according to disparity and SSD / SSSD of inverse depth A. Coste

16 Comparison of results Figure: Surface reconstruction based on smallest and multiple baseline A. Coste


17 Other data set Figure: Images of the test data set Figure: Associated inverse depth maps A. Coste

18 Comparison of results Figure: Surface reconstruction based on largest and multiple baseline A. Coste
19 Outline 1 2 Square Differences Other common metrics 3 Rectification 4 5 A. Coste
20 Conclusion In this project, we presented a stereo matching method that uses multiple stereo pairs with various baselines to improve distance estimation to reduce the ambiguity issue. Improvements and future investigations Improve Introduce Optical Flow and link with disparity Link between Hardware, Maths and Implementation A. Coste
21 Thanks for your attention! Questions? A. Coste
CS6320: 3D Computer Vision Final Project Multiple Baseline Stereo
 CS6320: 3D Computer Vision Final Project Multiple Baseline Stereo Arthur Coste: coste.arthur@gmail.com April 2013 1 Contents 1 Introduction 3 2 Theoretical presentation 4 2.1 Stereoscopy.........................................
CS6320: 3D Computer Vision Final Project Multiple Baseline Stereo Arthur Coste: coste.arthur@gmail.com April 2013 1 Contents 1 Introduction 3 2 Theoretical presentation 4 2.1 Stereoscopy.........................................
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera
 Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
Computer Vision I. Announcement. Stereo Vision Outline. Stereo II. CSE252A Lecture 15
 Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Stereo matching. Francesco Isgrò. 3D Reconstruction and Stereo p.1/21
 Stereo matching Francesco Isgrò 3D Reconstruction and Stereo p.1/21 Structure of a stereo vision system Extract interesting point from each image Determine a set of matching points Compute the fundamental
Stereo matching Francesco Isgrò 3D Reconstruction and Stereo p.1/21 Structure of a stereo vision system Extract interesting point from each image Determine a set of matching points Compute the fundamental
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Matching.
 Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Integration of Multiple-baseline Color Stereo Vision with Focus and Defocus Analysis for 3D Shape Measurement
 Integration of Multiple-baseline Color Stereo Vision with Focus and Defocus Analysis for 3D Shape Measurement Ta Yuan and Murali Subbarao tyuan@sbee.sunysb.edu and murali@sbee.sunysb.edu Department of
Integration of Multiple-baseline Color Stereo Vision with Focus and Defocus Analysis for 3D Shape Measurement Ta Yuan and Murali Subbarao tyuan@sbee.sunysb.edu and murali@sbee.sunysb.edu Department of
7. The Geometry of Multi Views. Computer Engineering, i Sejong University. Dongil Han
 Computer Vision 7. The Geometry of Multi Views Computer Engineering, i Sejong University i Dongil Han THE GEOMETRY OF MULTIPLE VIEWS Epipolar Geometry The Stereopsis Problem: Fusion and Reconstruction
Computer Vision 7. The Geometry of Multi Views Computer Engineering, i Sejong University i Dongil Han THE GEOMETRY OF MULTIPLE VIEWS Epipolar Geometry The Stereopsis Problem: Fusion and Reconstruction
Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]
![Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]](/thumbs/80/81283374.jpg "Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]") Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo Vision Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Stereo Vision 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University What s different between these two images? Objects that are close move more or less? The amount of horizontal movement is
Stereo Vision 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University What s different between these two images? Objects that are close move more or less? The amount of horizontal movement is
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Computer Vision I. Announcements. Random Dot Stereograms. Stereo III. CSE252A Lecture 16
 Announcements Stereo III CSE252A Lecture 16 HW1 being returned HW3 assigned and due date extended until 11/27/12 No office hours today No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in
Announcements Stereo III CSE252A Lecture 16 HW1 being returned HW3 assigned and due date extended until 11/27/12 No office hours today No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in
Lecture 14: Computer Vision
 CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Announcements. Stereo Vision Wrapup & Intro Recognition
 Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
Visual Tracking (1) Feature Point Tracking and Block Matching
 Feature Point Tracking and Block Matching") Intelligent Control Systems Visual Tracking (1) Feature Point Tracking and Block Matching Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Feature Point Tracking and Block Matching Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Measurement of Pedestrian Groups Using Subtraction Stereo
 Measurement of Pedestrian Groups Using Subtraction Stereo Kenji Terabayashi, Yuki Hashimoto, and Kazunori Umeda Chuo University / CREST, JST, 1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan terabayashi@mech.chuo-u.ac.jp
Measurement of Pedestrian Groups Using Subtraction Stereo Kenji Terabayashi, Yuki Hashimoto, and Kazunori Umeda Chuo University / CREST, JST, 1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan terabayashi@mech.chuo-u.ac.jp
Panoramic 3D Reconstruction Using Rotational Stereo Camera with Simple Epipolar Constraints
 Panoramic 3D Reconstruction Using Rotational Stereo Camera with Simple Epipolar Constraints Wei Jiang Japan Science and Technology Agency 4-1-8, Honcho, Kawaguchi-shi, Saitama, Japan jiang@anken.go.jp
Panoramic 3D Reconstruction Using Rotational Stereo Camera with Simple Epipolar Constraints Wei Jiang Japan Science and Technology Agency 4-1-8, Honcho, Kawaguchi-shi, Saitama, Japan jiang@anken.go.jp
Robert Collins CSE486, Penn State. Lecture 09: Stereo Algorithms
 Lecture 09: Stereo Algorithms left camera located at (0,0,0) Recall: Simple Stereo System Y y Image coords of point (X,Y,Z) Left Camera: x T x z (, ) y Z (, ) x (X,Y,Z) z X right camera located at (T x,0,0)
Lecture 09: Stereo Algorithms left camera located at (0,0,0) Recall: Simple Stereo System Y y Image coords of point (X,Y,Z) Left Camera: x T x z (, ) y Z (, ) x (X,Y,Z) z X right camera located at (T x,0,0)
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera
 Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Lecture 14: Basic Multi-View Geometry
 Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
A virtual tour of free viewpoint rendering
 A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
High Accuracy Depth Measurement using Multi-view Stereo
 High Accuracy Depth Measurement using Multi-view Stereo Trina D. Russ and Anthony P. Reeves School of Electrical Engineering Cornell University Ithaca, New York 14850 tdr3@cornell.edu Abstract A novel
High Accuracy Depth Measurement using Multi-view Stereo Trina D. Russ and Anthony P. Reeves School of Electrical Engineering Cornell University Ithaca, New York 14850 tdr3@cornell.edu Abstract A novel
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
CONTENTS. High-Accuracy Stereo Depth Maps Using Structured Light. Yeojin Yoon
 [Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
[Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
Evaluation of Different Methods for Using Colour Information in Global Stereo Matching Approaches
 Evaluation of Different Methods for Using Colour Information in Global Stereo Matching Approaches Michael Bleyer 1, Sylvie Chambon 2, Uta Poppe 1 and Margrit Gelautz 1 1 Vienna University of Technology,
Evaluation of Different Methods for Using Colour Information in Global Stereo Matching Approaches Michael Bleyer 1, Sylvie Chambon 2, Uta Poppe 1 and Margrit Gelautz 1 1 Vienna University of Technology,
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Depth extraction from unidirectional integral image using a modified multi-baseline technique
 Depth extraction from unidirectional integral image using a modified multi-baseline technique ChunHong Wu a, Amar Aggoun a, Malcolm McCormick a, S.Y. Kung b a Faculty of Computing Sciences and Engineering,
Depth extraction from unidirectional integral image using a modified multi-baseline technique ChunHong Wu a, Amar Aggoun a, Malcolm McCormick a, S.Y. Kung b a Faculty of Computing Sciences and Engineering,
Stereo. Many slides adapted from Steve Seitz
 Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15
 Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Omni-directional Multi-baseline Stereo without Similarity Measures
 Omni-directional Multi-baseline Stereo without Similarity Measures Tomokazu Sato and Naokazu Yokoya Graduate School of Information Science, Nara Institute of Science and Technology 8916-5 Takayama, Ikoma,
Omni-directional Multi-baseline Stereo without Similarity Measures Tomokazu Sato and Naokazu Yokoya Graduate School of Information Science, Nara Institute of Science and Technology 8916-5 Takayama, Ikoma,
Introduction à la vision artificielle X
 Introduction à la vision artificielle X Jean Ponce Email: ponce@di.ens.fr Web: http://www.di.ens.fr/~ponce Planches après les cours sur : http://www.di.ens.fr/~ponce/introvis/lect10.pptx http://www.di.ens.fr/~ponce/introvis/lect10.pdf
Introduction à la vision artificielle X Jean Ponce Email: ponce@di.ens.fr Web: http://www.di.ens.fr/~ponce Planches après les cours sur : http://www.di.ens.fr/~ponce/introvis/lect10.pptx http://www.di.ens.fr/~ponce/introvis/lect10.pdf
A novel point matching method for stereovision measurement using RANSAC affine transformation
 A novel point matching method for stereovision measurement using RANSAC affine transformation Naiguang Lu, Peng Sun, Wenyi Deng, Lianqing Zhu, Xiaoping Lou School of Optoelectronic Information & Telecommunication
A novel point matching method for stereovision measurement using RANSAC affine transformation Naiguang Lu, Peng Sun, Wenyi Deng, Lianqing Zhu, Xiaoping Lou School of Optoelectronic Information & Telecommunication
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Announcements. Stereo
 Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
Experimental Results of Multiple-Baseline Stereo
 Presented a~ EEE Special Workshop,.Passive Ranging, Oct. 1991, Princeton, NJ Experimental Results of MultipleBaseline Stereo Takeo Kanade and Tomoharu Nakahara School of Computer Science Camegie Mellon
Presented a~ EEE Special Workshop,.Passive Ranging, Oct. 1991, Princeton, NJ Experimental Results of MultipleBaseline Stereo Takeo Kanade and Tomoharu Nakahara School of Computer Science Camegie Mellon
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Lecture 6 Stereo Systems Multi-view geometry
 Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Using temporal seeding to constrain the disparity search range in stereo matching
 Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
A novel 3D torso image reconstruction procedure using a pair of digital stereo back images
 Modelling in Medicine and Biology VIII 257 A novel 3D torso image reconstruction procedure using a pair of digital stereo back images A. Kumar & N. Durdle Department of Electrical & Computer Engineering,
Modelling in Medicine and Biology VIII 257 A novel 3D torso image reconstruction procedure using a pair of digital stereo back images A. Kumar & N. Durdle Department of Electrical & Computer Engineering,
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION
 COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Announcements. Stereo
 Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Perception II: Pinhole camera and Stereo Vision
 Perception II: Pinhole camera and Stereo Vision Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Mobile Robot Control Scheme knowledge, data base mission commands Localization
Perception II: Pinhole camera and Stereo Vision Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Mobile Robot Control Scheme knowledge, data base mission commands Localization
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Lecture'9'&'10:'' Stereo'Vision'
 Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Stereo-Matching Techniques Optimisation Using Evolutionary Algorithms
 Stereo-Matching Techniques Optimisation Using Evolutionary Algorithms Vitoantonio Bevilacqua, Giuseppe Mastronardi, Filippo Menolascina, and Davide Nitti Dipartimento di Elettrotecnica ed Elettronica,
Stereo-Matching Techniques Optimisation Using Evolutionary Algorithms Vitoantonio Bevilacqua, Giuseppe Mastronardi, Filippo Menolascina, and Davide Nitti Dipartimento di Elettrotecnica ed Elettronica,
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
OPPA European Social Fund Prague & EU: We invest in your future.
 OPPA European Social Fund Prague & EU: We invest in your future. Patch tracking based on comparing its piels 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine
OPPA European Social Fund Prague & EU: We invest in your future. Patch tracking based on comparing its piels 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine
IMAGE-BASED 3D ACQUISITION TOOL FOR ARCHITECTURAL CONSERVATION
 IMAGE-BASED 3D ACQUISITION TOOL FOR ARCHITECTURAL CONSERVATION Joris Schouteden, Marc Pollefeys, Maarten Vergauwen, Luc Van Gool Center for Processing of Speech and Images, K.U.Leuven, Kasteelpark Arenberg
IMAGE-BASED 3D ACQUISITION TOOL FOR ARCHITECTURAL CONSERVATION Joris Schouteden, Marc Pollefeys, Maarten Vergauwen, Luc Van Gool Center for Processing of Speech and Images, K.U.Leuven, Kasteelpark Arenberg
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
CS 4495/7495 Computer Vision Frank Dellaert, Fall 07. Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang
 CS 4495/7495 Computer Vision Frank Dellaert, Fall 07 Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang Etymology Stereo comes from the Greek word for solid (στερεο), and the term can
CS 4495/7495 Computer Vision Frank Dellaert, Fall 07 Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang Etymology Stereo comes from the Greek word for solid (στερεο), and the term can
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Stereo Vision II: Dense Stereo Matching
 Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
Fast correlation-based stereo matching with the reduction of systematic errors
 Pattern Recognition Letters 26 (2005) 2221 2231 www.elsevier.com/locate/patrec Fast correlation-based stereo matching with the reduction of systematic errors Sukjune Yoon *, Sung-Kee Park, Sungchul Kang,
Pattern Recognition Letters 26 (2005) 2221 2231 www.elsevier.com/locate/patrec Fast correlation-based stereo matching with the reduction of systematic errors Sukjune Yoon *, Sung-Kee Park, Sungchul Kang,
Depth from two cameras: stereopsis
 Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera Stereo
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera Stereo
Robustifying the Flock of Trackers
 1-Feb-11 Matas, Vojir : Robustifying the Flock of Trackers 1 Robustifying the Flock of Trackers Tomáš Vojíř and Jiří Matas {matas, vojirtom}@cmp.felk.cvut.cz Department of Cybernetics, Faculty of Electrical
1-Feb-11 Matas, Vojir : Robustifying the Flock of Trackers 1 Robustifying the Flock of Trackers Tomáš Vojíř and Jiří Matas {matas, vojirtom}@cmp.felk.cvut.cz Department of Cybernetics, Faculty of Electrical
Department of Game Mobile Contents, Keimyung University, Daemyung3-Dong Nam-Gu, Daegu , Korea
 Image quality enhancement of computational integral imaging reconstruction for partially occluded objects using binary weighting mask on occlusion areas Joon-Jae Lee, 1 Byung-Gook Lee, 2 and Hoon Yoo 3,
Image quality enhancement of computational integral imaging reconstruction for partially occluded objects using binary weighting mask on occlusion areas Joon-Jae Lee, 1 Byung-Gook Lee, 2 and Hoon Yoo 3,
Introduction to Computer Vision. Week 10, Winter 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 10, Winter 2010 Instructor: Prof. Ko Nishino Today How do we recover geometry from 2 views? Stereo Can we recover geometry from a sequence of images Structure-from-Motion
Introduction to Computer Vision Week 10, Winter 2010 Instructor: Prof. Ko Nishino Today How do we recover geometry from 2 views? Stereo Can we recover geometry from a sequence of images Structure-from-Motion
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
Depth from two cameras: stereopsis
 Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Disparity Search Range Estimation: Enforcing Temporal Consistency
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Disparity Search Range Estimation: Enforcing Temporal Consistency Dongbo Min, Sehoon Yea, Zafer Arican, Anthony Vetro TR1-13 April 1 Abstract
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Disparity Search Range Estimation: Enforcing Temporal Consistency Dongbo Min, Sehoon Yea, Zafer Arican, Anthony Vetro TR1-13 April 1 Abstract
Embedded real-time stereo estimation via Semi-Global Matching on the GPU
 Embedded real-time stereo estimation via Semi-Global Matching on the GPU Daniel Hernández Juárez, Alejandro Chacón, Antonio Espinosa, David Vázquez, Juan Carlos Moure and Antonio M. López Computer Architecture
Embedded real-time stereo estimation via Semi-Global Matching on the GPU Daniel Hernández Juárez, Alejandro Chacón, Antonio Espinosa, David Vázquez, Juan Carlos Moure and Antonio M. López Computer Architecture
Human Body Recognition and Tracking: How the Kinect Works. Kinect RGB-D Camera. What the Kinect Does. How Kinect Works: Overview
 Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 787: Assignment 4, Stereo Vision: Block Matching and Dynamic Programming Due: 12:00noon, Fri. Mar. 30, 2007.
 CS 787: Assignment 4, Stereo Vision: Block Matching and Dynamic Programming Due: 12:00noon, Fri. Mar. 30, 2007. In this assignment you will implement and test some simple stereo algorithms discussed in
CS 787: Assignment 4, Stereo Vision: Block Matching and Dynamic Programming Due: 12:00noon, Fri. Mar. 30, 2007. In this assignment you will implement and test some simple stereo algorithms discussed in