LIBRARY OF THE MASSACHUSETTS INSTITUTE OF TECHNOLOGY
|
|
|
- Stephany Holland
- 6 years ago
- Views:
Transcription


1


2 LIBRARY OF THE MASSACHUSETTS INSTITUTE OF TECHNOLOGY
3

4 ' i *' 'A-'ivlft



5 .1/ ^ _ /n ON THE N-JOB, ONE-MACHINE, SEQUENCE-INDEPENDENT SCHEDULING PROBLEM WITH TARDINESS PENALTIES: A BRANCH-BOUND SOLUTION* Joel Shwimer / May MASSACHUSETTS INSTITUTE OF TECHNOLOGY 50 MEMORIAL DRIVE "^ BRIDGE, MASSACHUSETTS
6


7 DEWEY LiSRAI ON THE N-JOB, ONE-MACHINE, SEQUENCE-INDEPENDENT SCHEDULING PROBLEM WITH TARDINESS PENALTIES; A BRANCH-BOUND SOLUTION* Joel Shwimer v May *This paper is based substantially on my masters thesis. This copy is issued with the understanding that the paper is solely for the confidential use of the organization or individual to whom it is addressed.

8 f^cetvfd no'4(os-7o


9 H^^riscO ON THE N-JOB, ONE-MACHINE, SEQUENCE- INDKPENDKNT SCHEDULING PROBLEM WITH TARDINESS A BRANCH-BOUND SOLUTION PENALTIES: by Joel Shwimer Massachusetts Institute of Technology Abstract An efficient branch-bound algorithm is presented for solving the n-job, sequence independent, single machine scheduling problem where the goal is to minimize the total penalty costs resulting from tardiness of jobs. The development of this algorithm and computational results are given for the case of linear penalty functions. The modifications needed to handle the case of non-linear penalty functions are also presented. E53-384, Sloan School of Management, Massachusetts Institute of Technology, 50 Memorial Drive, Cambridge, Massachusetts,

10



11 TABLE OF CONTENTS Page I. The Problem 7 II. Other Research 9 III. Branch-Bound Algorithm 15 IV. Development of the Branch-Bound Algorithm 28 Stage 1 28 Stage 2 30 Stage 3 31 Stage 4 32 Stage 5 32 Stage 6 33 Stage 7 33 Stage 8 34 Stage 9 35 V. Computational Results for Final Algorithm.. 39 VI. Extensions and Future Work 44 Appendix I : Theorem A 48 Appendix II: Data Used in the Sample Problems 52 Bibliography 5 3
12

13 5 LIST OF TABLES Table Page 1 Summary of Developmental Stages 29 2 Developmental Stages Computational Results 37 3 Computational Results 42
14


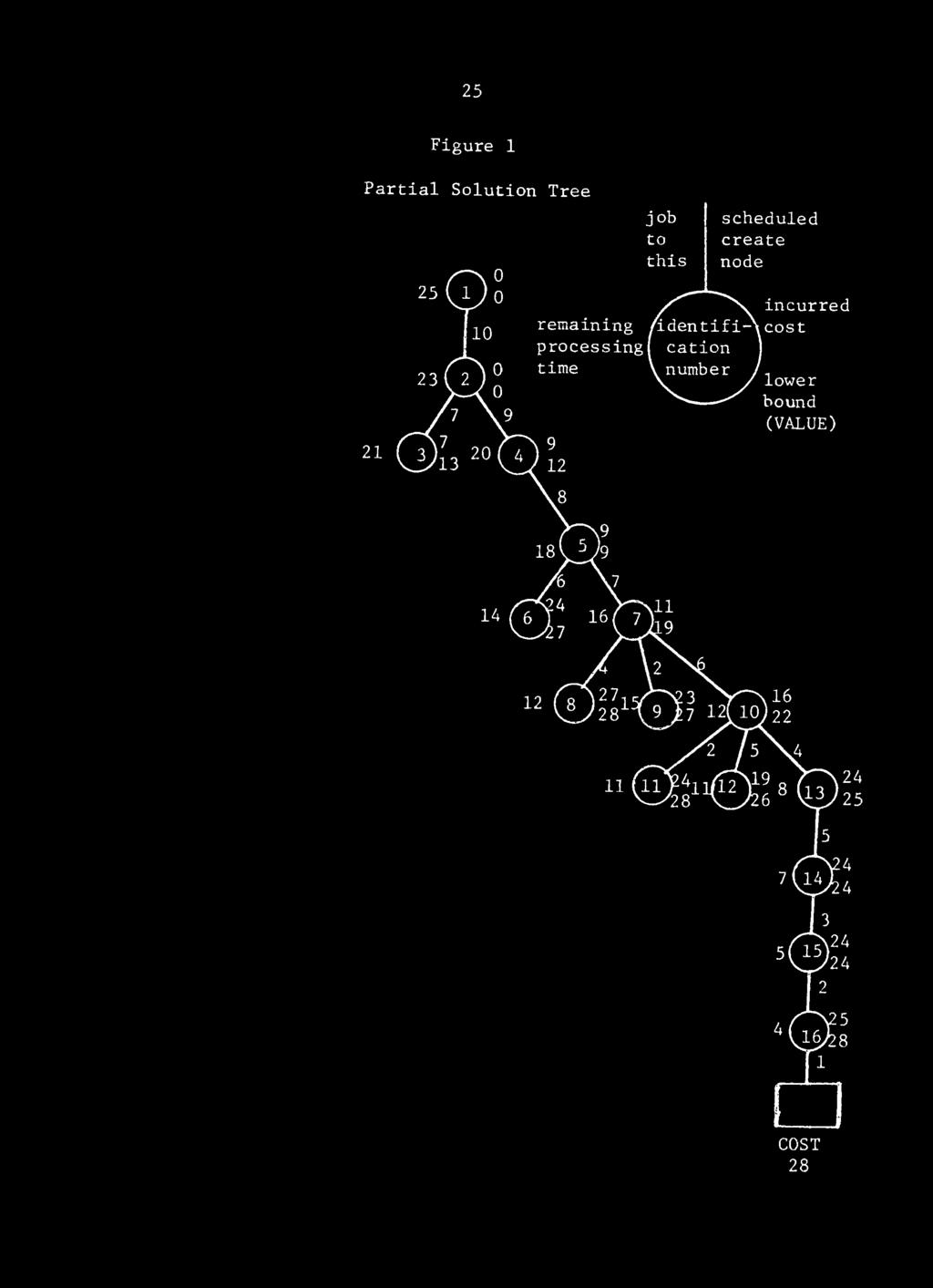
15 6 LIST OF FIGURES Figure Page 1 Partial Solution Tree 25 2 Partial Solution Tree at Optimality 26 3 Complete Solution Tree 27

16
![7 I. THE PROBLEM The basic problem of sequencing n jobs on one machine has received much attention in the literature [1], [3], [9].](/docs-images/74/70718252/images/17-2.jpg "A number of important results and solution methods have been proposed for certain variations of this basic problem.")
17 7 I. THE PROBLEM The basic problem of sequencing n jobs on one machine has received much attention in the literature [1], [3], [9]. A number of important results and solution methods have been proposed for certain variations of this basic problem. One of the best-known of these results is that the mean flow time, mean waiting time, mean lateness, as well as a number of other "regular measures" of a schedule are all minimized by sequencing the jobs in order of non-decreasing processing time [1, p. 29]. However, no such simple results are available when certain alternative measures of schedule effectiveness are used. The problem to be discussed in this paper is the scheduling of n jobs on a single machine where the goal is to minimize the total penalty costs resulting from the tardiness of the jobs. For each job i, there is a required processing time t., a due date d., and a penalty function P. which is a function of the tardiness of job i. Although many of the results in this paper can be applied to the general case where the penalty function, P. (tardiness of job i), takes on the value zero if the job is not tardy and is any non-decreasing function of tardiness, we will, at first, only consider the case of the linear penalty function: P. (d.,c.) = p. max (G,C.-d.) 1 x' 1 ^X XX where C. denotes the time that job i is completed when the particular schedule being evaluated is used. All n jobs become available at time
18



19 8 zero and their processing times are independent of the sequence in which they are scheduled. Although this problem is generally placed in the context of scheduling jobs on a machine, the situation being modeled occurs in a variety of different instances in the real world. Some examples of these occurrences include the scheduling of repairs at a garage, the scheduling of appointments in any single facility operation such as a doctor's office or a one-person travel agency, and even the scheduling of a student's time for homework assignments.
20
![II. OTHER RESEARCH This form of the basic problem was first presented by McNaughton [10], who argues for the desirability of a non-linear penalty function of tardiness, but deals only with the linear](/docs-images/74/70718252/images/21-1.jpg "case. He proves the important theorem that, for the given problem, an optimal solution exists in which no job is split [10, p. 4].")

21 II. OTHER RESEARCH This form of the basic problem was first presented by McNaughton [10], who argues for the desirability of a non-linear penalty function of tardiness, but deals only with the linear case. He proves the important theorem that, for the given problem, an optimal solution exists in which no job is split [10, p. 4]. Therefore we need only consider the various permutations of the n jobs to find the optimal schedule. However, even for modest-sized problems, complete enumeration is not computationally feasible since it requires the evaluation of nl sequences (e.g. a 20 job problem requires the evaluation of more 18 than 2.4 x 10 sequences). A number of approaches have been suggested for solving this problem without performing an explicit enumeration. McNaughton [10] presents one method and Schild and Fredman [12] generalize some of his results presenting another method. It has been shown [1, p. 48], however, that the latter does not insure an optimal solution. Schild and Fredman [13] also further generalize their method to consider the case of non-linear penalty functions. They develop a dynamic programming formulation although that term is never mentioned by them. No computational results are reported for any of these methods. Held and Karp [6] present a dynamic programming formulation of this problem and Lawler [8] presents an equivalent formulation. These approaches require the consideration of 2 possible subsets of the n jobs. The number of arithmetic operations is proportional to n2 and the storage required for simply the costs associated with each subset

22

![For the case of linear penalty functions, Lawler [8] also presents a linear programming formulation requiring n+2t constraints, where T is the total required processing time for all n jobs.](/docs-images/74/70718252/images/23-2.jpg "A simplex algorithm modified to handle a particular type of restricted entry constraint is required to solve this formulation.")
23 10 of jobs is 2-1 numbers. This method, although much more efficient than complete explicit enumeration, is still computationally infeasible for even modest-sized problems (e.g. a 20 job problem requires the storage of more than a million numbers). Lawler does say that it is a "simple matter for a 15 job problem to be solved on an IBM 7090". However, no computation times are reported either by Lawler or by Held and Karp. For the case of linear penalty functions, Lawler [8] also presents a linear programming formulation requiring n+2t constraints, where T is the total required processing time for all n jobs. A simplex algorithm modified to handle a particular type of restricted entry constraint is required to solve this formulation. It is also possible to formulate a much smaller mixed-integer 2 linear programming formulation requiring only n constraints, 3n continuous variables, and n(n-l)/2 zero-one variables. The current state of the art in solving such problems makes this formulation computationally infeasible for even modest-sized problems. Elmaghraby [2] presents a network model which is equivalent to the earlier dynamic programming formulations. The cost-minimization objective function is translated into a shortest route problem. To create his network, Elmaghraby defines S to be the set of all jobs numbered in ascending magnitude of d.. In general S denotes some subset of k jobs. If the set S represents the jobs to be performed, some job j in S must be performed last among the jobs constituting S,. For each such job j, we would be left with a subset of k-1 jobs, denoted by Sj^, which includes all of the jobs in S except for job j.
24
.")

25 11 Thus, S, ^ is the subset of jobs still unscheduled after job j is scheduled last among the jobs in S. Hence there are k possible subsets S^ that can be derived from each S. The network equivalent of this model is formed by representing the set S by a node and then joining it by n arcs to n nodes representing the sets S-^ ^ (1=1,....n). This construction process continues lantil n-1 ^-J ' ' the nodes representing the empty set S_ are reached. In general, the node representing some subset S is joined by k arcs to k nodes representing all of the possible subsets S^ ^ which can be created from S,. The length of the arc from the node representing some S to the node representing S^_, is the penalty cost incurred by scheduling job j last among the jobs in S namely length = p. max (0,T, -d.) 3 k J where T, = I t. is the completion time of the k. X les, k last job performed among the jobs of S if no idle time is allowed. The goal is to find the shortest path from the node representing S to any node representing an empty set S_ where the length of this path corresponds to the minimum possible total penalty cost. A schedule which achieves this minimum cost can be found by tracing back along the chosen path. Elmaghraby shows how branch-bound methods can
26
, then an optimal path. 2. S. S,.")

27 12 be applied to substantially reduce the required computation time as compared to the equivalent dynamic programming formulation. In developing his branch-bound algorithm, Elmaghraby proves the following lemma: If I, t. < d^ where d^ = MAX (d.), then an optimal path. 2. S. S,.-1 which passes through the node for this S must have the job in S with due date d, scheduled last among the jobs in S. k Elmagtiraby also proves certain dominance relations between nodes in his branch-bound tree. For the case of linear penalty functions, Elmaghraby outlines a six-step branch-bound algorithm using his lemma, certain dominance relations, and a lower bound at each node, representing a set of jobs S, computed by LB(S ) = f(s ) + MIN (p. max (0,T -d.)) where S, is the set of unscheduled jobs; k f(s ) is the length of the shortest route from the node representing S to this node; and T, = Z t. k. 1 les, k
28

![No computational results were reported since Elmaghraby has not programmed this algorithm for a computer [4], Emmons [5] considers the same basic problem with the objective of minimizing total](/docs-images/74/70718252/images/29-2.jpg "tardiness rather than a weighted sum of job tardiness.")
29 13 It would appear that certain steps (e.g., the dominance tests between nodes) would be quite hard to program efficiently for a computer. Large amounts of storage as well as a similar amount of computation would be required. No computational results were reported since Elmaghraby has not programmed this algorithm for a computer [4], Emmons [5] considers the same basic problem with the objective of minimizing total tardiness rather than a weighted sum of job tardiness. He proves several theorems related to obtaining an optimal ordering of the jobs with respect to his objective function and then devises a branch-bound algorithm based on his theorems. This algorithm has also not been coded for a computer, but some of the hand-calculated examples (mainly 10 job problems) that he reports seem to indicate the possibility of promising computational results. Nevertheless, Emmons anticipates greater difficulty with problems in which the due dates tend to be larger than the processing times (which was not the case for 11 of his 12 examples). This, however, is probably the more typical situation among real-world problems. Emmons also considers the more general objective of minimizing 2 g(x.) all jobs where X. is the tardiness of job i 1 g is any convex increasing function of x. >^
30


31 14 He generalizes several of his earlier results to this case, but the requirement that the penalty functions be the same for each job appears to be a severe limitation.
32


33 15 III. BRANCH-BOUND ALGORITHM The primary purpose of this paper is to develop and present a branch-bound algorithm for solving the n-job, one-machine, sequenceindependent scheduling problem where the objective is to minimize the sum of the incurred tardiness penalties. The work of Elmaghraby [2] provides a good framework within which to work; his shortest route formulation is the underlying structure for this algorithm. The branch-bound algorithm will now be listed followed by a discussion of the approach used and justification for some of the steps employed: Step 0. Initialize. a. Order the jobs by increasing d., breaking ties by placing the job with the larger p. first, and breaking remaining ties by placing the job with the smaller t, first. (Any remaining ties occur because the two jobs have exactly the same characteristics and these ties can be broken arbitrarily.) b. Test each pair of jobs i,j (i<j) by Theorem A: If p. > p, d. < d, and t. < t., then save the information that we will only consider schedules with job i preceding job j. (A proof of Theorem A is included in Appendix I.) c. Create root node and put it on node list. Perform the bookkeeping initialization. d. Search for a good initial problem upper bound by considering the n schedules formed by taking the jobs as
34
, drop it from the node list and start step 1 again.")
 to the incurred cost at node k.")
35 16 ordered in step O.a except for job i (i=l,...,n) which is scheduled last. Save the best of these n schedules and the associated total penalty cost as the current "best". Step 1. Choose a Node for Expansion Consider the last node placed on the node list. If it has been already expanded, or if its value is not less than the current "best" (i.e. it does not have the potential to produce a better schedule than the current best), drop it from the node list and start step 1 again. When the node list is empty, stop, since the current best schedule has been proved optimal. Otherwise expand the last node on the node list. Step 2. Expand Chosen Node To expand a node, say node k, consider the set, S, of all jobs as yet unscheduled at that node. a. If S, consists of only one job, m, find the total penalty cost of the schedule formed by placing job m first, by adding p max (0,d -t ) to the incurred cost at node k. m mm If this new cost is less than the current "best", save this schedule and the associated total penalty cost as the new "best". Otherwise the old "best" remains. In either case, drop node k from the node list and go to step 1. b. If S, consists of more than one job, test to see if the
36

 may have determined that job i must precede some job j. Thus if both job i and this job j are in S, we need not consider scheduling job i last among the jobs in S,. k d.")
37 17 total processing time of all as yet unscheduled jobs is less than or equal to the due date of the job, j, with the latest due date among unscheduled jobs. If this condition holds, only consider creating one successor node to node k by scheduling job j last among the jobs in S,. Then go to step 2.d. This is the use of Elmaghraby's lemma c. Otherwise, we must consider creating one successor node to node k for each job ^ in S, k that can be scheduled last among the jobs in S. Application of theorem A (step O.b) may have determined that job i must precede some job j. Thus if both job i and this job j are in S, we need not consider scheduling job i last among the jobs in S,. k d. Evaluate each potential successor node to node k (i.e. the scheduling of job j last among the jobs in S ) in the following fashion: VALUE = INCURRED COST AT NODE k + p. max (0,d.-T ) + MIN {p. max (0,d.-T, +t. ) + ics, ^ ^ ^ J k
38
![18 tardiness of job h _L 1,/Av /in a schedule formed, tmtxt / \i- + MAX (. ^v. ).[MIN, (p )]), by ordering the jobs g k hes^, h^j, hh as in ^^ k It^ step O.](/docs-images/74/70718252/images/39-1.jpg "a ^i^ h/i ^ gjtx where j denotes the job being scheduled to create this node as a successor to node k, S, k denotes the set of unscheduled jobs -\" at node T, = ( E t.")
.")
39 18 tardiness of job h _L 1,/Av /in a schedule formed, tmtxt / \i- + MAX (. ^v. ).[MIN, (p )]), by ordering the jobs g k hes^, h^j, hh as in ^^ k It^ step O.a ^i^ h/i ^ gjtx where j denotes the job being scheduled to create this node as a successor to node k, S, k denotes the set of unscheduled jobs -" at node T, = ( E t.) is the processing time of all ics, k jobs unscheduled at node k. If the value of the node created by scheduling job j is not less than the current "best", this node can be discarded without ever being added to the node list (i.e. without ever creating it). Otherwise, the incurred cost for this new node should be calculated as follows: INCURRED COST = INCURRED COST AT NODE k + p. max (0,d.-T, ) 3 3 ^ :. Now order all of the nodes created in step 2.b or 2.c but not discarded in step 2.d in order of decreasing

40
; however, the means for bounding the tree, as well as many other steps in the algorithm,")
 is chosen to be the one next evaluated, from among those on the tree having the most jobs already scheduled.")

41 19 VALUE and place them on the node list as nodes k+1, k+2 f. Mark node k as expanded and go to step 1. The above procedure creates the same basic tree as in Elmaghraby [2] (described in Section II of this paper); however, the means for bounding the tree, as well as many other steps in the algorithm, are quite different from his procedure. The algorithm outlined above is a "restricted flooding" branch-bound method since tlie node to be expanded is always on the lowest level (i.e. the farthest from the root node) on the tree. The partial schedule having the minimum lower bound on the total penalty cost (VALUE) is chosen to be the one next evaluated, from among those on the tree having the most jobs already scheduled. Proceeding this way results in more complete schedules, hence more feasible solutions, to be reached sooner. Therefore, if the algorithm is stopped before optimality has been proven, there is a greater chance of having reached a better solution. Step 2.b is the test indicated by Elmaghral)y 's Lemma, stated in Section II of this paper. In step 2.c, it is not always necessary to consider all still unscheduled jobs because of the application of Theorem A. This theorem is an extension of Emmons's theorem [5, p. 703] which states: For any two jobs i and j, if 1) t. _5^ t., 2) the jobs in set B precede job j in an optimal schedule, and ^This term was first heard by the author in a seminar on Tree-Search Methods taught by J. Pierce in Spring, 1969 at M.I.T.
42


43 20 3) d max ( l p, +p. ^ keb '^ J ^, d. ) ; then only schedules with job i preceding job j need be considered in searching for the optimal. Theorem A extends this result to the case where the penalty function for each job can be different. It also presents the static version by removing any consideration of a particular set of jobs B which must precede job j. A proof of Theorem A is presented in Appendix I. The method of calculation of the lower bound on the total penalty cost used in step 2.d combines several results proven by different people. To find this lower bound value for a successor node to node k, Elmaghraby uses: VALUE = INCURRED COST AT NODE k + p. max (G.T.-d.) + MIN (p. max (0,d.-T, +t.)) k This lower bound includes the smallest possible penalty cost incurred by scheduling some job last among the remaining unscheduled jobs after job j is scheduled last among the jobs in S. It is a one-step, lookahead procedure. The lower bound calculated in step 2.d goes still further. Let job j denote the additional job to be scheduled to create this node. The one-step look-ahead procedure considers the scheduling of some job, say job i, last among the jobs in S, excluding

44

45 21 job j. However other jobs in S may still remain unscheduled. We should consider any additional penalty cost which must be incurred because of these jobs. Jackson [7] has shown that the maximum tardiness in a one-stage process can be minimized if the jobs are ordered by increasing due date. So sequencing the jobs in S, other than jobs j and i, gives us a lower bound on the tardiness that must still be incurred. Since we seek weighted tardiness rather than simply tardiness, a lower bound on the weighted tardiness that must be incurred can be found by using the minimum of the p for this set of jobs. Taking the minimum of the sum of these two additional penalty costs (over all jobs i in S excluding job j) gives us a tighter bound on penalty cost than was obtained in the one-step, look-ahead method. Storage requirements for this method are quite low. Since the above-described restricted flooding technique is used for choosing the 2 node to be expanded, a maximum of (n +n)/2 nodes will have to be maintained at any given time (where n is the number of jobs in the problem). In fact, it is exceedingly unlikely that this maximum will ever actually be needed. To fully specify a node, at most the following seven numbers are needed: 1) a node identification number (unique for each node that is currently being maintained) 2) the identification number of its parent node; 3) the job which was scheduled to create this node from its parent node;
46

47 22 4) the total processing time required for all unscheduled jobs (T in above discussion) 5) the cost incurred by those jobs already scheduled upon reaching this node; 6) a lower bound (VALUE) on the cost of all solutions passing through this node; and 7) a marker to indicate the status of this node (i.e. expanded or not) In the current implementation of the algorithm, six numbers are stored for each node (the seventh number, item one, being implied by 2 the search routine). Therefore, a maximum of 3(n +n) numbers must be saved at any one time (e.g. for n equal 20, this is only 1260; and for n equal 40, this is still only 4920). In fact, this storage requirement could be reduced by 50% since items four and five could be easily calculated by tracing up the tree, and item seven could be stored simply negating it^m two. or three to indicate an expanded node. However, the increased computation time needed to implement this reduced storage scheme would be significant. The branch-bound algorithm described above has been programmed in Fortran and fully tested. A discussion of the steps in its development are given in Section IV of this paper to show the effect each improvement had on the over-all solution method. Some computational results for the final algorithm will be presented in Section V.
48

49 23 Before presenting the various stages in the development of the final algorithm, an example will be presented to show how the tree develops as the algorithm proceeds towards finding the optimal solution and proving its optimality. The example, which will later be referred to as Problem 3, is a 10 job problem with the minimum total penalty cost of 27. The actual data to define this problem is included in Appendix II (as Problem 3). There are 10! (i.e. 3,628,800) feasible schedules if idle time and job-splitting are not permitted. Application of Theorem A enables us to determine that we need consider only those schedules in which job 1 precedes job 4, job 2 precedes job 7, job 3 precedes jobs 4, 7 and 9, job 5 precedes jobs 7 and 9, and job 8 precedes job 9. This reduces the number of feasible schedules that must be considered to only 127,140 (a reduction of over 96%). In performing step O.d which searches for a good initial problem upper bound, we find that the completely due-date ordered schedule is, in fact, the best of the ten schedules considered. It has a total penalty cost of 29. Therefore we never have to create any node which has a VALUE of 29 or larger. Figure 1 shows the tree which has been created as the algorithm proceeded to reach its first completed schedule. This schedule, (1, 2, 3, 5, 4, 6, 7, 8, 9, 10), has a cost of 28, which is, of course, less than 29. Only 16 nodes have been created and a great majority of the feasible schedules have already been eliminated from consideration.
50
, costs only 27 and will turn out to be an optimal one.")


51 24 Figure 2 shows the tree when the next complete schedule is reached. This new schedule, (1, 2, 3, 5, 4, 6, 8, 9, 7, 10), costs only 27 and will turn out to be an optimal one. Note how large portions of the tree have already been discarded. A total of 32 nodes have been created so far. Only four additional nodes will have to be created to prove optimality. Figure 3 shows the entire tree of 36 nodes used in solving this problem. The entire tree was never held in the computer at one time. The generation and discarding procedure required a maximum of 16 nodes to be stored in the computer at any one time (less than 30% of the maximum possible number of nodes that might have been needed at any one time).
52


53 25 Figure 1 Partial Solution Tree 21
54

55 26 Figure 2 Partial Solution Tree at Optimality scheduled create node remaining /iden processing time incurred cost lower bound (VALUE)
56


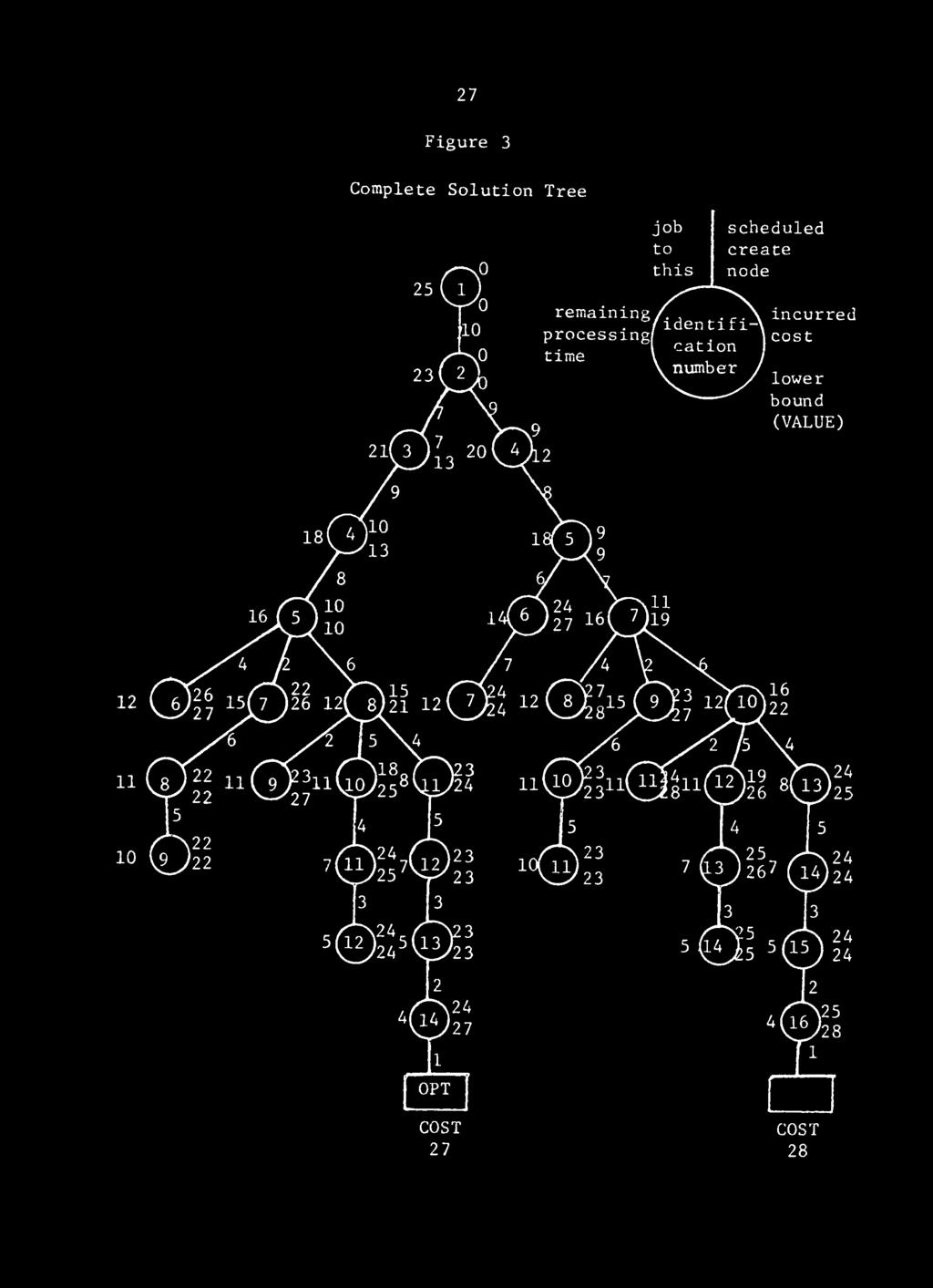
57 27 Figure 3 Complete Solution Tree
58

59 28 IV. DEVELOPMENT OF THE BRANCH- BOUND ALGORITHM This section of the paper will describe the nine stages of the development of the algorithm. This discussion should be particularly useful to people who might, in the future, use branch-bound techniques for solving combinatorial optimization problems. Each stage was fully programmed and tested on a computer in an attempt to see how each modification to the algorithm would affect its ability to solve the problem. The stages are summarized in Table 1. STAGE 1 The initial stage concentrated on obtaining a method for solving the problem, with little thought given to over-all efficiency of the method. Hence the scheme used was one of simple implicit enumeration based on a due date ordering. First, the jobs are arranged in order of increasing due date (job 1 has the earliest due date and job n, the latest). Ties are broken as indicated in Step O.a of the final branch-bound algorithm. An initial "problem upper-bound" is obtained by computing the total penalty cost incurred by this "due-date-ordered" schedule. Then using the root node (node 1 representing all jobs unscheduled) as the starting point, n successor nodes are created corresponding to scheduling each of the n jobs last. Nodes which represent partial schedules with incurred costs larger than or equal to the current problem upper bound are never created. The algorithm proceeds by considering the last node to have been created which has not yet been discarded. If this node has been
60



61 29 Table 1 SUMMARY OF DEVELOPMENTAL STAGES Stage Description 1 Basic enumeration scheme based on due-date ordering 2 Stage 1 with Elmaghraby's lemma 3 Stage 2 with Elmaghraby's calculation for lower bound at each node 4 Stage 2 with problem upper-bound calculations for all nodes which are immediate descendents of the root node 5 Stages 3 and 4 combined 6 Stage 5 with step 2.d lower bound calculation for all nodes 7 Stage 6 with more sophisticated "restricted flooding" technique choosing the node with tie smallest lower bound at the lowest level to be explored next 8 The same as Stage 7 except for a new bookkeeping method for knowing unscheduled jobs at a node 9 Stage 8 with Theorem A included
62

.")

63 30 expanded it is now discarded and the next most recently created node is considered. If the incurred cost for this node is less than the current problem upper bound it is expanded in the same manner as described above for the root node (at most k successor nodes for a node corresponding to a set of k unscheduled jobs) ; otheinvise this node is discarded and the next most recently created node is considered. Whenever a complete schedule is reached, it is retained only if it is better than the best previously found solution (the problem upper bound being revised accordingly). This naive, branch-bound procedure will eventually find an optimal solution and prove its optimality by implicitly considering every possible schedule. STAGE 2 It is obvious that other methods for choosing the node to explore next and for calculating a lower bound on the cost of all schedules passing through any node are both possible and desirable. The second stage includes the use of Elmaghraby's lemma. When any node is being expanded, a check is made to see whether the job with the latest duedate among the unscheduled jobs can be placed last among this set without incurring any penalty cost. If this is true, only the one successor node has to be created; thus the number of nodes that are created and later explored is greatly reduced. It is not possible for the one successor node to overlay its parent because, in later passes through this part of the tree, certain necessary information (e.g. which jobs have been already scheduled) would be lost. Under a
64


65 31 diiferent storage scheme for the tree, the reduction in reqaircd storage might prove both feasible and beneficial, however using tlie currently implemented scheme, even the benefits would be so minimal as to rule out the desirability of such an idea. In most cases, a significant reduction in required computation was realized because the added computation needed for the check is minimal while the reduction in number of created nodes can be quite large. STAGE 3 The next step was to improve the lower bound calculation made at each node. As a first step in this direction, the one-step, lookahead procedure suggested by Elmaghraby was used. Thus, for a node being created by scheduling job j last among the set, S, of unscheduled jobs, a lower bound may be calculated from: VALUE = INCURRED COST AT PARENT NODE + p. max (0,d.-T, ) + MIN [p. max (0,d.-T, +t. ) ] les, k where T, = Z t. k ] Again, at the cost of some minimal increased computational effort, this improved lower bound should help to reduce the number of nodes
66

 which was performed last, were evaluated.")

67 32 that must be created and later explored. Testing showed the number of nodes created always to be reduced; however, because of the increased computational effort in calculating the lower bounds, the total computation time sometimes increased slightly. STAGE 4 In this stage, the improved lower bound calculation of STAGE 3 was dropped and an attempt to obtain a better initial problem upper bound was included. Rather than considering only the due-date-ordered schedule, the n schedules formed by due-date-ordering, except for job i (i=l,...,n) which was performed last, were evaluated. The best of these n schedules was retained as the "current optimal" solution. The algorithm proceeded exactly as did the STAGE 2 method after performing this modified method for obtaining an initial problem upper bound. Reductions in the number of nodes created and in the total computation time were almost always obtained. Having the lower "current best cost" allowed many nodes not to be created. This resulted in the saving of computation time. STAGE 5 Since the modifications for both STAGE 3 and STAGE 4 appeared to be promising, both were included to produce STAGE 5. Thus, attention was directed to finding a better initial problem upper bound and to finding larger lower bounds at the various nodes being created. Moreover, no node would ever be created unless its lower bound was less
68


69 33 than the current problem upper bound. This combination, in almost all cases, proved to be better than either STAGE 3 or STAGE A by itself in reduction of both nodes created and computation time. STAGE 6 A further improvement was made to the lower bound calculation in creating STAGE 6. This calculation is the one listed as step 2.d of the final algorithm. Again, at the cost of increased computation in the lower bound calculation, many nodes could be discarded before creation thereby saving future exploration of these nodes and their possible successors. In most cases improvement was realized. However with certain data, the increased computation time needed to calculate the tighter lower bounds was greater than the reduction in computation time due to fewer nodes being created. STAGE 7 In the previous stages, attention had been paid only to improving the calculation of the bounds, both the initial problem upper bounds and the lower bounds at each node being created. In this stage, effort was directed towards improving the choice of which node to expand next. The use of a more sophisticated "restricted flooding" technique replaced the choice according to the due-date-ordered implicit enumeration scheme. If all nodes representing subsets of k unscheduled jobs are said to be at "level k", restricted flooding requires that the node chosen for exploration be in the (numerically) lowest available level.
70



71 34 Thus, if possible, the search proceeds to a lower level on each step. The change that was implemented in this stage was to choose, as the node to be expanded, the one on the lowest level which had the smallest lower bound. The revised branching procedure was easily placed into the framework used for the previous stages. When a node is being expanded, instead of creating the successor nodes in order of increasing due date, all of these nodes can be created and then placed on the tree in order of decreasing lower bound. Thus the node placed on the tree last will be the one on the lowest level with the smallest lower bound (i.e. the one to be explored next). STAGE 7 includes this restricted flooding rule for branching in conjunction with all of the improved bounding rules incorporated in previous stages. Testing showed that this improvement yielded better reductions in computation time than any other improvement except for the use of Elmaghraby's lemma in STAGE 2. Not only was overall computation time reduced, but even greater reductions were obtained in the time to find the optimal solution. Thus, if the algorithm is stopped before optimality has been proved, there is a greater chance of having reached a better, if not in fact an optimal, solution. STAGE 8 A new bookkeeping method for keeping track of which jobs are still unscheduled at any node was adopted. Rather than searching up the tree each time this knowledge was required, a scheme for continually
72


73 35 updating this information as the search moved about the tree was implemented. This had no effect on the number of nodes created or the order of their exploration, but did result in a significant reduction of the required computation time. STAGE 9 The final improvement in the branch-bound algorithm was the inclusion of the results of Theorem A. Theorem A: If t. < t., d. < d,, and p. > p. then there exists an i-j i-j i-j optimal solution in which job i precedes job j. Theorem A can impose restrictions (care must be taken not to permit conflicting restrictions such as job i precedes job j and job j precedes job i) which help to greatly limit the number of schedules to be considered. Each of the above stages was programmed in Fortran and tested on an IBM 1130 computer. The results of the test runs are included in this paper as Table 2. Problem 1 is the example from Elmaghraby [2], Use of this theorem restricts the 7! = 50A0 possible schedules in Elmaghraby 's example to only 252. When this theorem is used on the data for Emmon's example 1, the 10! = possible schedules are reduced to only Although this is, perhaps, an extreme example it does illustrate the potential beneifts to be derived by using this theorem.
74
![36 Problem 2 is example 1 from Emmons [5], and the other four problems were created](/docs-images/74/70718252/images/75-0.jpg "somewhat arbitrarily by hand for the purpose of testing the computer programs.")


75 36 Problem 2 is example 1 from Emmons [5], and the other four problems were created somewhat arbitrarily by hand for the purpose of testing the computer programs. The actual data for all six problems is included as Appendix II. These computational results are being included to demonstrate the effect of each improvement in the algorithm on its solution ability. The computer time required is probably the most important measure of effectiveness. It is apparent that the later stages dominate the earlier ones, particularly for the larger problems.
76


77 37 Table 2 Developmental Stages Computational Results Problem
78

79 38
80

. The penalty function coefficients, p.")
81 39 V. COMPUTATIONAL RESULTS FOR FINAL ALGORITHM In order to provide a more extensive test for the final algorithm (Stage 9), a program was set up to generate sets of data drawn randomly from prescribed distributions. The processing times, t., were drawn 3 either from a uniform distribution with range one to ten or from a triangular distribution with the same range. The due dates, d., were drawn from a uniform distribution with range t. (so that no job would be late if it were started at time zero) to 5.5N (where N was the number of jobs in the problem and 5.5 was the expected mean of the distribution of processing times due to the integerization of the times). The penalty function coefficients, p., were uniformly distributed integers between one and five. All of the generated data was kept as integers. This method was used for data generation because it provided what appeared to be somewhat realistic data. The program was used on an IBM 360/65 computer where system routines enabled accurate timing of the computation (to the nearest hundredth of a second). Fortran IV, H-level (optimization level 2) was used for the compilation of the program. It was found that problems ran approximately 48 times faster on this system than they had on the IBM 1130 computer used for the initial testing and stage comparison runs Data was created for sixty test problems in each of the following four categories: 10 job problems with uniformly distributed processing times; 10 job problems with triangularly distributed processing
82


83 40 times 20 job problems with uniformly distributed processing times; and times. 20 job problems with triangularly distributed processing The computational results for these 240 problems are summarized in Table 3. From these results it appears, as was expected, that problems having processing times drawn from a uniform distribution are somewhat easier to solve than those with triangularly distributed processing times. The median solution time for all of the 10 job problems was 0.07 seconds; for all of the 20 job problems, the median solution time was 0.29 seconds. These results show that the algorithm is certaintly computationally feasible for such modest-sized problems. Preliminary investigation indicates that somewhat larger problems can still be solved within quite short periods of computer time. For 30 job problems, the raediam solution time for a sample of thirty problems (half having uniformly distributed processing times and half having triangularly distributed processing times) was 4.13 seconds. Computational experience has shown (see Table 3) that some small fraction of the problems may require a long time to solve (i.e. much greater than the median solution time for that size problem). Because of this, it is important to see where in the solution process the optimal schedule is actually found. In about 45% of the 10 job problems and 15% of the 20 job problems, an optimal schedule was found in step O.d of the algorithm (i.e. during the search for an initial
84


 problems, less than 60% (on the average) of the solutio- time was spent in finding the optimum for those problems which required more than the")
85 41 problem upper bound). Problems in which the optimal solution was found either in step 0,d of the algorithm or at the first complete schedule reached in searching down the tree comprised over 80% of the 10 job problems and over 45% of the 20 job problems. These results help to explain the skewness of the solution time distributions. It is also interesting to observe how much time is used in finding an optimal schedule as compared to how much time is then used in proving optimality. The average fraction of the solution time spent in finding the optimal solution varied between 65 and 70 percent for the four sets of problems that were solved. However, for the larger (i.e. 20 job) problems, less than 60% (on the average) of the solutio- time was spent in finding the optimum for those problems which required more than the median time to solve completely. These are the problems for which it might be necessary to stop the algorithm short of completion and fortunately, these are also the problems in which the optimal solutions are found sooner relative to the total required solution time.
86



87 .42 Table 3 COMPUTATIONAL RESULTS Number of jobs to be scheduled Distribution of t^ uniform triangular uniform triangular Number of problems run Number of problems solved Median solution time.08 Interquartile range for solution times.04 Range for solution times Mean solution time.085 Standard deviation of solution times.035 ** Skewness of solution time distribution *** Kurtosis of solution time distribution , ! > , Fraction of problems where the optimal solution was found at an immediate successor of the root node
88


.652.")
89 A3 Table 3 (continued) Fraction of problems where the optimal solution was found at an immediate successor of the root node or at the first completed schedule found searching down the tree Average fraction of the solution time used to find the optimal solution (for problems with solution times below median solution time) Average fraction of the solution time used to find the optimal solution (for problems with solution times greater than median) Average fraction of the solution time used to find the optima], solution (for all problems in the group that were solved) All times are given in seconds of IBM 360/65 CPU usage. * One problem was stopped after ten minutes ol computer time, ** 3 Skewness being defined as u /o. 4 Kurtosis being defined as P,/o
90

91 (x) 44 VI. EXTENSIONS MD FUTURE WORK A branch-bound algorithm has been presented to solve the problem of scheduling n immediately available jobs for a single machine where the goal is to minimize the total penalty cost resulting from linear penalty functions of the tardiness of the jobs. This work can be extended in several directions. One extension which can be easily handled by the current algorithm is the inclusion of pairwise precedence constraints. It might be desirable to specify that job b must precede job c and job e must precede job d. The mechanism for handling such constraints has already been incorporated to implement the results of Theorem A. The only modification to the algorithm that is needed would be to insure that Theorem A does not "create" any pseudo-precedence constraints which are inconsistent with those specified in the problem (e.g. if job b must precede job c, and job c must precede job d, we cannot allow Theorem A to specify that we will only consider schedules in which job d precedes job b). Another extension would be to allow for non-linear penalty functions. The following modifications would be necessary. Theorem A would have to be generalized in the following manner: Theorem A (generalized) If t. _< t., d. <_ d., and P.(x) >_ P. (x) for all x, < X < T-d., then there exists an optimal solution in which 1 job i precedes job j (where P. is the penalty function of
92
) The lower bound calculation, step 2.")
) -^ les, k tardiness of job h in a schedule + MIN P^(MAX {formed by ordering the jobs in S, })] k h/j, h^i as in step O.")

93 45 tardiness for job i, and T is the total processing time required by all n jobs). The incurred cost calculation in step 2.d would have to be changed to: INCURRED COST = INCURRED COST AT NODE k + P. (max (0,d.-T, )) The lower bound calculation, step 2.d, would also have to be changed to: VALUE = INCURRED COST AT NODE k + P. (max (0,d.-T )) J J k + MIN [P. (max (0,d.-T, +t. )) -^ les, k tardiness of job h in a schedule + MIN P^(MAX {formed by ordering the jobs in S, })] k h/j, h^i as in step O.a For linear penalty functions, this bound reduces to the one presented in the above algorithm. These are the only changes needed to handle non-linear penalty functions provided they are non-decreasing functions of tardiness which take on the value zero if the tardiness equals zero. It is quite possible to suggest ways to modify, and hopefully improve, the branch-bound algorithm. Many of these have already been considered and will be now discussed briefly. It may be beneficial
94

95 46 to expend a greater effort in obtaining a better initial problem upper bound. Any number of heuristics could be used for this purpose, and some have been tested. Even though the extra computational effort could be kept to a minimum, the net effect on total computation time might even be detrimental. The current method yields very good results. In fact, many problems become optimal at the initial step or at the first complete schedule found on the tree. Thus, on the average, very few nodes would be eliminated. The use of a heuristic to generate complete solutions at nodes other than the root node may prove helpful in the early stages of the search. However, in the later stages, the only effect of such a technique would be to increase computation time. The possibility of performing a complete enumeration to expand a node after some level in the tree has been reached was also considered. However, the use of Elmaghraby's lemma. Theorem A, and the lower-bound calculations seem to be more efficient than enumeration with regard to computation time. The use of dominance relations between nodes, as suggested by Elmaghraby [2], is another possible area for exploration. It is clear that such relations could greatly reduce the necessary amount of searching in the lower levels of the tree. However, great care would have to be used in performing such tests. The vast number of nodes that might be created would require a large amount of storage. Also, the tests would involve searching through a long list of previously created nodes which might prove to be very time consuming. One way to include these tests would be to save all nodes created at some
96

![One other set of possibilities is to incorporate more results of other researchers (e.g. Emmons [5] or Schild and Fredman [12]).](/docs-images/74/70718252/images/97-2.jpg "Most of these require working from both ends of the schedule at the same time.")
97 47 particular level of the tree (say about two-thirds of the way down) and then to apply the dominance tests only at that level. As problems become larger, the potential gains become greater, but so do the potential storage and computation time requirements. One other set of possibilities is to incorporate more results of other researchers (e.g. Emmons [5] or Schild and Fredman [12]). Most of these require working from both ends of the schedule at the same time. This would necessitate major changes to the current method of maintaining the tree and many of the current "time-saving" features would be lost. Other results, perhaps even a dynamic version of Theorem A, are indeed possible, but the potential gains would in most cases compare unfavorably with the required extra computation time. It is clear that a reduction in computation time could easily be obtained by reprogramming the algorithm in an assembly language rather than in Fortran. Also certain tests for optional output (e.g. at the creation of each node) could be removed.
98



99 48 Appendix I Theorem A: For any two jobs J. and J. such that 0<t. <t.,0<d. <d., and p. 2. P ^y there exists an optimal schedule in which job J. precedes job J.. J Proof: Consider any schedule in which job J. precedes job J.. We must show that the total penalty cost is either decreased or left unchanged by interchanging these two jobs. First, observe that any jobs which are scheduled before job J. or after job J. are not affected by this interchange. Also note that any jobs scheduled between jobs J. and J are advanced in time by an amount t.-t. >^ thereby insuring that the penalty cost arising from these jobs has been either reduced or left unchanged. Thus we need consider only the change in penalty costs incurred by nobs J^ and J. themselves, i 3 Denote by K, the time at which job J, is finished in the original schedule; and by L, the time at which job J. is started. Thus K <_ L. The penalty cost, P', due to these two jobs in the original schedule can be represented as: P' = p. max (0,K-d.) + p. max (0,L+t.-d.)
100
 + p. max (0,K-t +t.-d.) Therefore we must show that AP = P\" - P' < for all < K < L AP = p.")
 + p. max (0,K-t.-Ht.-d ) -. p. max (0,K-d.) J 1 3 1 J 1 1 J J - p.")
![(L+t.-d.) = p.[(k-d.) - max (0,K-d.)] +p.[max (0,K-t.+t.-d J - (K-t.+t.-d. ) i' ^ ' J 1 i J 1 1 ' + (p^-p^)(l-k+t.](/docs-images/74/70718252/images/101-2.jpg ") + PjCt.-tJ")
101 49 The penalty cost, P", due to these two jobs after they have been interchanged can be represented as: P" = p^ max (0,L+t.-d.) + p. max (0,K-t +t.-d.) Therefore we must show that AP = P" - P' < for all < K < L AP = p. max (0,L+t.-d.) + p. max (0,K-t.+t.-d. J 1 J 1 ' J p. max (0,K-d.) - p. max (0,L+t.-d.) There are three cases which must be considered: CASE I 0<d.<d.<L J AP = p.(l+t.-d.) + p. max (0,K-t.-Ht.-d ) -. p. max (0,K-d.) J J 1 1 J J - p. (L+t.-d.) = p.[(k-d.) - max (0,K-d.)] +p.[max (0,K-t.+t.-d J - (K-t.+t.-d. ) i' ^ ' J 1 i J 1 1 ' + (p^-p^)(l-k+t.) + PjCt.-tJ
102
 ] = 0; if K < d. then p,[k-d.-0] -< 0; 3 J J [max (0,M) - M] < for all M, L > K so L-K+t. > 0; p.")
 + p. max (0,K-t.+t.-d. - p.(0) - p, (L+t.-d.) J ill = p. [max (0, L+t.-d.) - (L+t.")
![-K)] J 1 J 1. +p.[max (0,K-t.+t.-d.) - (K-t.+t ^1 ' ' J 1 1 J 1 1 ) + (p^-p.) (L+t.-K) + p. (t.](/docs-images/74/70718252/images/103-2.jpg "-t But AP is a sum of terms each not greater than since K L _< d. and t. >_ so [max (0, L+t.-d.")
103 -d. 50 But AP is a sum of terms each not greater than since if K 21 d. then p. [K-d.-(K-d. ) ] = 0; if K < d. then p,[k-d.-0] -< 0; 3 J J [max (0,M) - M] < for all M, L > K so L-K+t. > 0; p. < p_, so p. -p. < 0; t. < t. so t.-t, < 0. J-i Ji- i-j ij- CASE II d. < L < d J AP = p. max (0,L+t.-d.) + p. max (0,K-t.+t.-d. - p.(0) - p, (L+t.-d.) J ill = p. [max (0, L+t.-d.) - (L+t.-K)] J 1 J 1. +p.[max (0,K-t.+t.-d.) - (K-t.+t ^1 ' ' J 1 1 J 1 1 ) + (p^-p.) (L+t.-K) + p. (t.-t But AP is a sum of terms each not greater than since K L _< d. and t. >_ so [max (0, L+t.-d.) - (L+t.-K)] <_ 0;

104
![51 [max (0,M) - M] < for all M; p. < p. so p. -p. < and L > K so (L-K+t.) > 0; J 1 J 1 1 t. < t. and p. > so p.(t.-t.) < 0, CASE III L < d. < - d.](/docs-images/74/70718252/images/105-0.jpg "1 - J AP = p. max (0,L+t.-d.) + p. max (0,K-t.+t.-d. 3 1 J 1 J 1 1 - p.(0) - p. max (0,L+t.-d.) = p. [max (0,L+t.-d.) - max (0,L+t.-d.) J 1 J 11' + (p.")
 - max (0, L+t.-d.) <_ 0; p. <^ p. so (p. -p.) <^ and max (0,M) >^ for all M; K < d. and t. < t. so max (0,K-d.+t.-t. ) = -X i-j ^'llj' 0.")
105 51 [max (0,M) - M] < for all M; p. < p. so p. -p. < and L > K so (L-K+t.) > 0; J 1 J 1 1 t. < t. and p. > so p.(t.-t.) < 0, CASE III L < d. < - d. 1 - J AP = p. max (0,L+t.-d.) + p. max (0,K-t.+t.-d. 3 1 J 1 J p.(0) - p. max (0,L+t.-d.) = p. [max (0,L+t.-d.) - max (0,L+t.-d.) J 1 J 11' + (p. -p.) max (0,L+t.-d.) + p. max (0,K-t.+t.-d 1 J 1 i But AP is a sum of terms each not greater than since d. > d^ so L+t.-d. < L+t.-d. therefore j-i ij- 11 max (0,L+t -d.) - max (0, L+t.-d.) <_ 0; p. <^ p. so (p. -p.) <^ and max (0,M) >^ for all M; K < d. and t. < t. so max (0,K-d.+t.-t. ) = -X i-j ^'llj' 0.
106



107 52 Appendix II Data Used in the Sample Problem for Development Stage Testing Problem 1 Job 1 t. 3 d^ 2 « Problem 2 Job 1 t. 80 fi Problem Job Problem Job Problem Job t, dj P^ Problem Job i
108
, pp. 105-108. 3. Elmaghraby, S. W.")
109 53 BIBLIOGRAPHY 1. Conway, R. W., W. L. Maxwell, and L. W. Miller, Theory of Scheduling, Addison Wesley, Reading, Mass., Elmaghraby, S. E., "The One Machine Sequencing Problem with Delay Costs," Journal of Industrial Engineering, Vol. XIX, No. 2 (February 1968), pp Elmaghraby, S. W., "The Machine Sequencing Problem Review and Extensions," Naval Research Logistics Quarterly, Vol. 15, No. 2 (June 1968), pp Elmaghraby, S. E., private communication, September 8, Emmons, H., "One-Machine Sequencing to Minimize Certain Functions of Job Tardiness," Operations Research, Vol. 17, No. 4 (July-August 1969), pp Held, M., and R. M. Karp, "A Dynamic Programming Approach to Sequencing Problems," Journal of the Society for Industrial and Applied Mathematics, Vol. 10, No. 1 (March 1962), pp Jackson, J. R., "Scheduling a Production Line to Minimize Maximum Tardiness," Management Sciences Research Project, Research Report No. 43, UCLA, July Lawler, E., "On Scheduling Problems with Deferral Costs," Management Science, Vol. 11, No. 2 (October 1964), pp Maxwell, W. L., "The Scheduling of Single Machine Systems: A Review," The International Journal of Production Research, Vol. 3, No. 3 (1964), pp McNaughton, R., "Scheduling with Deadlines and Loss Functions," Management Science, Vol. 6, No. 1 (September 1959), pp Moore, J. M., "An N Job, One Machine Sequencing Algorithm for Minimizing the Number of Late Jobs," Management Science, Vol. 15, No. 1 (September 1968), pp Schild, A., and I. J. Fredman, "On Scheduling Tasks with Associated Linear Loss Functions," Management Science, Vol. 7, No. 3 (November 1961), pp Schild, A., and I. J. Fredman, "Scheduling Tasks with Deadlines and Non-linear Loss Functions," Management Science, Vol. 9, No. 1 (September 1962), pp
110


111 54 BIBLIOGRAPHY (continued) 14. Smith, W., "Various Optimizers for Single Stage Production," Naval Research Logistics Quarterly, Vol. 3, Nos. 1 and 2 (March and June 1956), pp
112
113

114 Mr^m

115
116

![Nos.V N0S.U6; im:i' 'f]ii ip 3 TDfiD DD3 TDb b71 ^?](/docs-images/74/70718252/images/117-1.jpg "9' 70 3 T06D DD3 fivs bse V^f-y^ 3 TOfiD D03 TOb beh W^0-7C'")

117 3 TOaO D bbo ^' TOfiD DOB TQb bb3 '/?'-.-/.'/i? ^'j'fe- 3 TDfiD DD3 TDb b3d 3 TDSD D03 TDb bdb ^;7'7d HD2 Nos.V N0S.U6; im:i' 'f]ii ip 3 TDfiD DD3 TDb b71 ^?9' 70 3 T06D DD3 fivs bse V^f-y^ 3 TOfiD D03 TOb beh W^0-7C' t/^z-r.?? bll ^62-7^ 3 TDfiD DD3 675 b37 4i,'i'70 3 IDflD 0D3 675 b76 qi^'7q 3 TDaO DD3 675 b45 3 TDSD DD3 TOb S6D ^b^'7o


118
Applied Algorithm Design Lecture 3
 Applied Algorithm Design Lecture 3 Pietro Michiardi Eurecom Pietro Michiardi (Eurecom) Applied Algorithm Design Lecture 3 1 / 75 PART I : GREEDY ALGORITHMS Pietro Michiardi (Eurecom) Applied Algorithm
Applied Algorithm Design Lecture 3 Pietro Michiardi Eurecom Pietro Michiardi (Eurecom) Applied Algorithm Design Lecture 3 1 / 75 PART I : GREEDY ALGORITHMS Pietro Michiardi (Eurecom) Applied Algorithm
3 No-Wait Job Shops with Variable Processing Times
 3 No-Wait Job Shops with Variable Processing Times In this chapter we assume that, on top of the classical no-wait job shop setting, we are given a set of processing times for each operation. We may select
3 No-Wait Job Shops with Variable Processing Times In this chapter we assume that, on top of the classical no-wait job shop setting, we are given a set of processing times for each operation. We may select
Framework for Design of Dynamic Programming Algorithms
 CSE 441T/541T Advanced Algorithms September 22, 2010 Framework for Design of Dynamic Programming Algorithms Dynamic programming algorithms for combinatorial optimization generalize the strategy we studied
CSE 441T/541T Advanced Algorithms September 22, 2010 Framework for Design of Dynamic Programming Algorithms Dynamic programming algorithms for combinatorial optimization generalize the strategy we studied
Advanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madras
 Advanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madras Lecture 18 All-Integer Dual Algorithm We continue the discussion on the all integer
Advanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madras Lecture 18 All-Integer Dual Algorithm We continue the discussion on the all integer
CSE 417 Branch & Bound (pt 4) Branch & Bound
 Branch & Bound") CSE 417 Branch & Bound (pt 4) Branch & Bound Reminders > HW8 due today > HW9 will be posted tomorrow start early program will be slow, so debugging will be slow... Review of previous lectures > Complexity
CSE 417 Branch & Bound (pt 4) Branch & Bound Reminders > HW8 due today > HW9 will be posted tomorrow start early program will be slow, so debugging will be slow... Review of previous lectures > Complexity
Admissible Search Methods for Minimum Penalty Sequencing of Jobs with Setup Times on One and Two Machines
 Admissible Search Methods for Minimum Penalty Sequencing of Jobs with Setup Times on One and Two Machines Anup K. Sen, A. Bagchi and Bani K. Sinha Indian Institute of Management Calcutta Joka, Diamond
Admissible Search Methods for Minimum Penalty Sequencing of Jobs with Setup Times on One and Two Machines Anup K. Sen, A. Bagchi and Bani K. Sinha Indian Institute of Management Calcutta Joka, Diamond
Methods and Models for Combinatorial Optimization Exact methods for the Traveling Salesman Problem
 Methods and Models for Combinatorial Optimization Exact methods for the Traveling Salesman Problem L. De Giovanni M. Di Summa The Traveling Salesman Problem (TSP) is an optimization problem on a directed
Methods and Models for Combinatorial Optimization Exact methods for the Traveling Salesman Problem L. De Giovanni M. Di Summa The Traveling Salesman Problem (TSP) is an optimization problem on a directed
Instituto Nacional de Pesquisas Espaciais - INPE/LAC Av. dos Astronautas, 1758 Jd. da Granja. CEP São José dos Campos S.P.
 XXXIV THE MINIMIZATION OF TOOL SWITCHES PROBLEM AS A NETWORK FLOW PROBLEM WITH SIDE CONSTRAINTS Horacio Hideki Yanasse Instituto Nacional de Pesquisas Espaciais - INPE/LAC Av. dos Astronautas, 1758 Jd.
XXXIV THE MINIMIZATION OF TOOL SWITCHES PROBLEM AS A NETWORK FLOW PROBLEM WITH SIDE CONSTRAINTS Horacio Hideki Yanasse Instituto Nacional de Pesquisas Espaciais - INPE/LAC Av. dos Astronautas, 1758 Jd.
Generalized Network Flow Programming
 Appendix C Page Generalized Network Flow Programming This chapter adapts the bounded variable primal simplex method to the generalized minimum cost flow problem. Generalized networks are far more useful
Appendix C Page Generalized Network Flow Programming This chapter adapts the bounded variable primal simplex method to the generalized minimum cost flow problem. Generalized networks are far more useful
Multi-Way Number Partitioning
 Proceedings of the Twenty-First International Joint Conference on Artificial Intelligence (IJCAI-09) Multi-Way Number Partitioning Richard E. Korf Computer Science Department University of California,
Proceedings of the Twenty-First International Joint Conference on Artificial Intelligence (IJCAI-09) Multi-Way Number Partitioning Richard E. Korf Computer Science Department University of California,
Single Machine Scheduling with Interfering Job Sets. Arizona State University PO Box Tempe, AZ
 Single Machine Scheduling with Interfering Job Sets Ketan Khowala 1,3, John Fowler 1,3, Ahmet Keha 1* and Hari Balasubramanian 2 1 Department of Industrial Engineering Arizona State University PO Box 875906
Single Machine Scheduling with Interfering Job Sets Ketan Khowala 1,3, John Fowler 1,3, Ahmet Keha 1* and Hari Balasubramanian 2 1 Department of Industrial Engineering Arizona State University PO Box 875906
Distributed minimum spanning tree problem
 Distributed minimum spanning tree problem Juho-Kustaa Kangas 24th November 2012 Abstract Given a connected weighted undirected graph, the minimum spanning tree problem asks for a spanning subtree with
Distributed minimum spanning tree problem Juho-Kustaa Kangas 24th November 2012 Abstract Given a connected weighted undirected graph, the minimum spanning tree problem asks for a spanning subtree with
Integer Programming. Xi Chen. Department of Management Science and Engineering International Business School Beijing Foreign Studies University
 Integer Programming Xi Chen Department of Management Science and Engineering International Business School Beijing Foreign Studies University Xi Chen (chenxi0109@bfsu.edu.cn) Integer Programming 1 / 42
Integer Programming Xi Chen Department of Management Science and Engineering International Business School Beijing Foreign Studies University Xi Chen (chenxi0109@bfsu.edu.cn) Integer Programming 1 / 42
We have already seen the transportation problem and the assignment problem. Let us take the transportation problem, first.
 Advanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madras Lecture 19 Network Models In this lecture, we will discuss network models. (Refer
Advanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madras Lecture 19 Network Models In this lecture, we will discuss network models. (Refer
H. W. Kuhn. Bryn Mawr College
 VARIANTS OF THE HUNGARIAN METHOD FOR ASSIGNMENT PROBLEMS' H. W. Kuhn Bryn Mawr College The author presents a geometrical modelwhich illuminates variants of the Hungarian method for the solution of the
VARIANTS OF THE HUNGARIAN METHOD FOR ASSIGNMENT PROBLEMS' H. W. Kuhn Bryn Mawr College The author presents a geometrical modelwhich illuminates variants of the Hungarian method for the solution of the
Algorithms for Integer Programming
 Algorithms for Integer Programming Laura Galli November 9, 2016 Unlike linear programming problems, integer programming problems are very difficult to solve. In fact, no efficient general algorithm is
Algorithms for Integer Programming Laura Galli November 9, 2016 Unlike linear programming problems, integer programming problems are very difficult to solve. In fact, no efficient general algorithm is
Splitter Placement in All-Optical WDM Networks
 plitter Placement in All-Optical WDM Networks Hwa-Chun Lin Department of Computer cience National Tsing Hua University Hsinchu 3003, TAIWAN heng-wei Wang Institute of Communications Engineering National
plitter Placement in All-Optical WDM Networks Hwa-Chun Lin Department of Computer cience National Tsing Hua University Hsinchu 3003, TAIWAN heng-wei Wang Institute of Communications Engineering National
Optimization of fuzzy multi-company workers assignment problem with penalty using genetic algorithm
 Optimization of fuzzy multi-company workers assignment problem with penalty using genetic algorithm N. Shahsavari Pour Department of Industrial Engineering, Science and Research Branch, Islamic Azad University,
Optimization of fuzzy multi-company workers assignment problem with penalty using genetic algorithm N. Shahsavari Pour Department of Industrial Engineering, Science and Research Branch, Islamic Azad University,
Reload Cost Trees and Network Design
 Reload Cost Trees and Network Design Ioannis Gamvros, ILOG, Inc., 1080 Linda Vista Avenue, Mountain View, CA 94043, USA Luis Gouveia, Faculdade de Ciencias da Universidade de Lisboa, Portugal S. Raghavan,
Reload Cost Trees and Network Design Ioannis Gamvros, ILOG, Inc., 1080 Linda Vista Avenue, Mountain View, CA 94043, USA Luis Gouveia, Faculdade de Ciencias da Universidade de Lisboa, Portugal S. Raghavan,
Applied Lagrange Duality for Constrained Optimization
 Applied Lagrange Duality for Constrained Optimization Robert M. Freund February 10, 2004 c 2004 Massachusetts Institute of Technology. 1 1 Overview The Practical Importance of Duality Review of Convexity
Applied Lagrange Duality for Constrained Optimization Robert M. Freund February 10, 2004 c 2004 Massachusetts Institute of Technology. 1 1 Overview The Practical Importance of Duality Review of Convexity
Fundamentals of Operations Research. Prof. G. Srinivasan. Department of Management Studies. Indian Institute of Technology, Madras. Lecture No.
 Fundamentals of Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madras Lecture No. # 13 Transportation Problem, Methods for Initial Basic Feasible
Fundamentals of Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madras Lecture No. # 13 Transportation Problem, Methods for Initial Basic Feasible
A Reduction of Conway s Thrackle Conjecture
 A Reduction of Conway s Thrackle Conjecture Wei Li, Karen Daniels, and Konstantin Rybnikov Department of Computer Science and Department of Mathematical Sciences University of Massachusetts, Lowell 01854
A Reduction of Conway s Thrackle Conjecture Wei Li, Karen Daniels, and Konstantin Rybnikov Department of Computer Science and Department of Mathematical Sciences University of Massachusetts, Lowell 01854
Theorem 2.9: nearest addition algorithm
 There are severe limits on our ability to compute near-optimal tours It is NP-complete to decide whether a given undirected =(,)has a Hamiltonian cycle An approximation algorithm for the TSP can be used
There are severe limits on our ability to compute near-optimal tours It is NP-complete to decide whether a given undirected =(,)has a Hamiltonian cycle An approximation algorithm for the TSP can be used
Computational Complexity and Implications for Security DRAFT Notes on Infeasible Computation for MA/CS 109 Leo Reyzin with the help of Nick Benes
 Computational Complexity and Implications for Security DRAFT Notes on Infeasible Computation for MA/CS 109 Leo Reyzin with the help of Nick Benes The Study of Computational Complexity Let s summarize what
Computational Complexity and Implications for Security DRAFT Notes on Infeasible Computation for MA/CS 109 Leo Reyzin with the help of Nick Benes The Study of Computational Complexity Let s summarize what
Online Facility Location
 Online Facility Location Adam Meyerson Abstract We consider the online variant of facility location, in which demand points arrive one at a time and we must maintain a set of facilities to service these
Online Facility Location Adam Meyerson Abstract We consider the online variant of facility location, in which demand points arrive one at a time and we must maintain a set of facilities to service these
Statistics Case Study 2000 M. J. Clancy and M. C. Linn
 Statistics Case Study 2000 M. J. Clancy and M. C. Linn Problem Write and test functions to compute the following statistics for a nonempty list of numeric values: The mean, or average value, is computed
Statistics Case Study 2000 M. J. Clancy and M. C. Linn Problem Write and test functions to compute the following statistics for a nonempty list of numeric values: The mean, or average value, is computed
MVE165/MMG630, Applied Optimization Lecture 8 Integer linear programming algorithms. Ann-Brith Strömberg
 MVE165/MMG630, Integer linear programming algorithms Ann-Brith Strömberg 2009 04 15 Methods for ILP: Overview (Ch. 14.1) Enumeration Implicit enumeration: Branch and bound Relaxations Decomposition methods:
MVE165/MMG630, Integer linear programming algorithms Ann-Brith Strömberg 2009 04 15 Methods for ILP: Overview (Ch. 14.1) Enumeration Implicit enumeration: Branch and bound Relaxations Decomposition methods:
AN ALGORITHM WHICH GENERATES THE HAMILTONIAN CIRCUITS OF A CUBIC PLANAR MAP
 AN ALGORITHM WHICH GENERATES THE HAMILTONIAN CIRCUITS OF A CUBIC PLANAR MAP W. L. PRICE ABSTRACT The paper describes an algorithm which generates those Hamiltonian circuits of a given cubic planar map
AN ALGORITHM WHICH GENERATES THE HAMILTONIAN CIRCUITS OF A CUBIC PLANAR MAP W. L. PRICE ABSTRACT The paper describes an algorithm which generates those Hamiltonian circuits of a given cubic planar map
Integer Programming Theory
 Integer Programming Theory Laura Galli October 24, 2016 In the following we assume all functions are linear, hence we often drop the term linear. In discrete optimization, we seek to find a solution x
Integer Programming Theory Laura Galli October 24, 2016 In the following we assume all functions are linear, hence we often drop the term linear. In discrete optimization, we seek to find a solution x
Parallel Auction Algorithm for Linear Assignment Problem
 Parallel Auction Algorithm for Linear Assignment Problem Xin Jin 1 Introduction The (linear) assignment problem is one of classic combinatorial optimization problems, first appearing in the studies on
Parallel Auction Algorithm for Linear Assignment Problem Xin Jin 1 Introduction The (linear) assignment problem is one of classic combinatorial optimization problems, first appearing in the studies on
A NEW SIMPLEX TYPE ALGORITHM FOR THE MINIMUM COST NETWORK FLOW PROBLEM
 A NEW SIMPLEX TYPE ALGORITHM FOR THE MINIMUM COST NETWORK FLOW PROBLEM KARAGIANNIS PANAGIOTIS PAPARRIZOS KONSTANTINOS SAMARAS NIKOLAOS SIFALERAS ANGELO * Department of Applied Informatics, University of
A NEW SIMPLEX TYPE ALGORITHM FOR THE MINIMUM COST NETWORK FLOW PROBLEM KARAGIANNIS PANAGIOTIS PAPARRIZOS KONSTANTINOS SAMARAS NIKOLAOS SIFALERAS ANGELO * Department of Applied Informatics, University of
Lecture notes on Transportation and Assignment Problem (BBE (H) QTM paper of Delhi University)
 QTM paper of Delhi University)") Transportation and Assignment Problems The transportation model is a special class of linear programs. It received this name because many of its applications involve determining how to optimally transport
Transportation and Assignment Problems The transportation model is a special class of linear programs. It received this name because many of its applications involve determining how to optimally transport
Advanced Algorithms Class Notes for Monday, October 23, 2012 Min Ye, Mingfu Shao, and Bernard Moret
 Advanced Algorithms Class Notes for Monday, October 23, 2012 Min Ye, Mingfu Shao, and Bernard Moret Greedy Algorithms (continued) The best known application where the greedy algorithm is optimal is surely
Advanced Algorithms Class Notes for Monday, October 23, 2012 Min Ye, Mingfu Shao, and Bernard Moret Greedy Algorithms (continued) The best known application where the greedy algorithm is optimal is surely
Star Decompositions of the Complete Split Graph
 University of Dayton ecommons Honors Theses University Honors Program 4-016 Star Decompositions of the Complete Split Graph Adam C. Volk Follow this and additional works at: https://ecommons.udayton.edu/uhp_theses
University of Dayton ecommons Honors Theses University Honors Program 4-016 Star Decompositions of the Complete Split Graph Adam C. Volk Follow this and additional works at: https://ecommons.udayton.edu/uhp_theses
Hashing. Hashing Procedures
 Hashing Hashing Procedures Let us denote the set of all possible key values (i.e., the universe of keys) used in a dictionary application by U. Suppose an application requires a dictionary in which elements
Hashing Hashing Procedures Let us denote the set of all possible key values (i.e., the universe of keys) used in a dictionary application by U. Suppose an application requires a dictionary in which elements
February 24, :52 World Scientific Book - 9in x 6in soltys alg. Chapter 3. Greedy Algorithms
 Chapter 3 Greedy Algorithms Greedy algorithms are algorithms prone to instant gratification. Without looking too far ahead, at each step they make a locally optimum choice, with the hope that it will lead
Chapter 3 Greedy Algorithms Greedy algorithms are algorithms prone to instant gratification. Without looking too far ahead, at each step they make a locally optimum choice, with the hope that it will lead
Discrete Optimization. Lecture Notes 2
 Discrete Optimization. Lecture Notes 2 Disjunctive Constraints Defining variables and formulating linear constraints can be straightforward or more sophisticated, depending on the problem structure. The
Discrete Optimization. Lecture Notes 2 Disjunctive Constraints Defining variables and formulating linear constraints can be straightforward or more sophisticated, depending on the problem structure. The
Seminar on. A Coarse-Grain Parallel Formulation of Multilevel k-way Graph Partitioning Algorithm
 Seminar on A Coarse-Grain Parallel Formulation of Multilevel k-way Graph Partitioning Algorithm Mohammad Iftakher Uddin & Mohammad Mahfuzur Rahman Matrikel Nr: 9003357 Matrikel Nr : 9003358 Masters of
Seminar on A Coarse-Grain Parallel Formulation of Multilevel k-way Graph Partitioning Algorithm Mohammad Iftakher Uddin & Mohammad Mahfuzur Rahman Matrikel Nr: 9003357 Matrikel Nr : 9003358 Masters of
Rollout Algorithms for Discrete Optimization: A Survey
 Rollout Algorithms for Discrete Optimization: A Survey by Dimitri P. Bertsekas Massachusetts Institute of Technology Cambridge, MA 02139 dimitrib@mit.edu August 2010 Abstract This chapter discusses rollout
Rollout Algorithms for Discrete Optimization: A Survey by Dimitri P. Bertsekas Massachusetts Institute of Technology Cambridge, MA 02139 dimitrib@mit.edu August 2010 Abstract This chapter discusses rollout
12.1 Formulation of General Perfect Matching
 CSC5160: Combinatorial Optimization and Approximation Algorithms Topic: Perfect Matching Polytope Date: 22/02/2008 Lecturer: Lap Chi Lau Scribe: Yuk Hei Chan, Ling Ding and Xiaobing Wu In this lecture,
CSC5160: Combinatorial Optimization and Approximation Algorithms Topic: Perfect Matching Polytope Date: 22/02/2008 Lecturer: Lap Chi Lau Scribe: Yuk Hei Chan, Ling Ding and Xiaobing Wu In this lecture,
6. Concluding Remarks
 [8] K. J. Supowit, The relative neighborhood graph with an application to minimum spanning trees, Tech. Rept., Department of Computer Science, University of Illinois, Urbana-Champaign, August 1980, also
[8] K. J. Supowit, The relative neighborhood graph with an application to minimum spanning trees, Tech. Rept., Department of Computer Science, University of Illinois, Urbana-Champaign, August 1980, also
Lecture Notes on Contracts
 Lecture Notes on Contracts 15-122: Principles of Imperative Computation Frank Pfenning Lecture 2 August 30, 2012 1 Introduction For an overview the course goals and the mechanics and schedule of the course,
Lecture Notes on Contracts 15-122: Principles of Imperative Computation Frank Pfenning Lecture 2 August 30, 2012 1 Introduction For an overview the course goals and the mechanics and schedule of the course,
Chapter S:II. II. Search Space Representation
 Chapter S:II II. Search Space Representation Systematic Search Encoding of Problems State-Space Representation Problem-Reduction Representation Choosing a Representation S:II-1 Search Space Representation
Chapter S:II II. Search Space Representation Systematic Search Encoding of Problems State-Space Representation Problem-Reduction Representation Choosing a Representation S:II-1 Search Space Representation
Advanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madras
 Advanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madras Lecture 28 Chinese Postman Problem In this lecture we study the Chinese postman
Advanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madras Lecture 28 Chinese Postman Problem In this lecture we study the Chinese postman
Interleaving Schemes on Circulant Graphs with Two Offsets
 Interleaving Schemes on Circulant raphs with Two Offsets Aleksandrs Slivkins Department of Computer Science Cornell University Ithaca, NY 14853 slivkins@cs.cornell.edu Jehoshua Bruck Department of Electrical
Interleaving Schemes on Circulant raphs with Two Offsets Aleksandrs Slivkins Department of Computer Science Cornell University Ithaca, NY 14853 slivkins@cs.cornell.edu Jehoshua Bruck Department of Electrical
Research Notes for Chapter 2 *
 Research Notes for Chapter 2 * Scientific developments can always be made logical and rational with sufficient hindsight. It is amazing, however, how clouded the crystal ball looks beforehand. We all wear
Research Notes for Chapter 2 * Scientific developments can always be made logical and rational with sufficient hindsight. It is amazing, however, how clouded the crystal ball looks beforehand. We all wear
Optimal Detector Locations for OD Matrix Estimation
 Optimal Detector Locations for OD Matrix Estimation Ying Liu 1, Xiaorong Lai, Gang-len Chang 3 Abstract This paper has investigated critical issues associated with Optimal Detector Locations for OD matrix
Optimal Detector Locations for OD Matrix Estimation Ying Liu 1, Xiaorong Lai, Gang-len Chang 3 Abstract This paper has investigated critical issues associated with Optimal Detector Locations for OD matrix
Dartmouth Computer Science Technical Report TR Chain Match: An Algorithm for Finding a Perfect Matching of a Regular Bipartite Multigraph
 Dartmouth Computer Science Technical Report TR2014-753 Chain Match: An Algorithm for Finding a Perfect Matching of a Regular Bipartite Multigraph Stefanie Ostrowski May 28, 2014 Abstract We consider the
Dartmouth Computer Science Technical Report TR2014-753 Chain Match: An Algorithm for Finding a Perfect Matching of a Regular Bipartite Multigraph Stefanie Ostrowski May 28, 2014 Abstract We consider the
AN ABSTRACTION-BASED METHODOLOGY FOR MECHANICAL CONFIGURATION DESIGN
 AN ABSTRACTION-BASED METHODOLOGY FOR MECHANICAL CONFIGURATION DESIGN by Gary Lee Snavely A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Mechanical
AN ABSTRACTION-BASED METHODOLOGY FOR MECHANICAL CONFIGURATION DESIGN by Gary Lee Snavely A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Mechanical
Pincer-Search: An Efficient Algorithm. for Discovering the Maximum Frequent Set
 Pincer-Search: An Efficient Algorithm for Discovering the Maximum Frequent Set Dao-I Lin Telcordia Technologies, Inc. Zvi M. Kedem New York University July 15, 1999 Abstract Discovering frequent itemsets
Pincer-Search: An Efficient Algorithm for Discovering the Maximum Frequent Set Dao-I Lin Telcordia Technologies, Inc. Zvi M. Kedem New York University July 15, 1999 Abstract Discovering frequent itemsets
A Hybrid Recursive Multi-Way Number Partitioning Algorithm
 Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence A Hybrid Recursive Multi-Way Number Partitioning Algorithm Richard E. Korf Computer Science Department University
Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence A Hybrid Recursive Multi-Way Number Partitioning Algorithm Richard E. Korf Computer Science Department University
On total domination and support vertices of a tree
 On total domination and support vertices of a tree Ermelinda DeLaViña, Craig E. Larson, Ryan Pepper and Bill Waller University of Houston-Downtown, Houston, Texas 7700 delavinae@uhd.edu, pepperr@uhd.edu,
On total domination and support vertices of a tree Ermelinda DeLaViña, Craig E. Larson, Ryan Pepper and Bill Waller University of Houston-Downtown, Houston, Texas 7700 delavinae@uhd.edu, pepperr@uhd.edu,
MASS Modified Assignment Algorithm in Facilities Layout Planning
 International Journal of Tomography & Statistics (IJTS), June-July 2005, Vol. 3, No. JJ05, 19-29 ISSN 0972-9976; Copyright 2005 IJTS, ISDER MASS Modified Assignment Algorithm in Facilities Layout Planning
International Journal of Tomography & Statistics (IJTS), June-July 2005, Vol. 3, No. JJ05, 19-29 ISSN 0972-9976; Copyright 2005 IJTS, ISDER MASS Modified Assignment Algorithm in Facilities Layout Planning
Comparison of TSP Algorithms
 Comparison of TSP Algorithms Project for Models in Facilities Planning and Materials Handling December 1998 Participants: Byung-In Kim Jae-Ik Shim Min Zhang Executive Summary Our purpose in this term project
Comparison of TSP Algorithms Project for Models in Facilities Planning and Materials Handling December 1998 Participants: Byung-In Kim Jae-Ik Shim Min Zhang Executive Summary Our purpose in this term project
Overview. H. R. Alvarez A., Ph. D.
 Network Modeling Overview Networks arise in numerous settings: transportation, electrical, and communication networks, for example. Network representations also are widely used for problems in such diverse
Network Modeling Overview Networks arise in numerous settings: transportation, electrical, and communication networks, for example. Network representations also are widely used for problems in such diverse
An Improved Upper Bound for the Sum-free Subset Constant
 1 2 3 47 6 23 11 Journal of Integer Sequences, Vol. 13 (2010), Article 10.8.3 An Improved Upper Bound for the Sum-free Subset Constant Mark Lewko Department of Mathematics University of Texas at Austin
1 2 3 47 6 23 11 Journal of Integer Sequences, Vol. 13 (2010), Article 10.8.3 An Improved Upper Bound for the Sum-free Subset Constant Mark Lewko Department of Mathematics University of Texas at Austin
CS 580: Algorithm Design and Analysis. Jeremiah Blocki Purdue University Spring 2018
 CS 580: Algorithm Design and Analysis Jeremiah Blocki Purdue University Spring 2018 Chapter 11 Approximation Algorithms Slides by Kevin Wayne. Copyright @ 2005 Pearson-Addison Wesley. All rights reserved.
CS 580: Algorithm Design and Analysis Jeremiah Blocki Purdue University Spring 2018 Chapter 11 Approximation Algorithms Slides by Kevin Wayne. Copyright @ 2005 Pearson-Addison Wesley. All rights reserved.
The Probabilistic Method
 The Probabilistic Method Po-Shen Loh June 2010 1 Warm-up 1. (Russia 1996/4 In the Duma there are 1600 delegates, who have formed 16000 committees of 80 persons each. Prove that one can find two committees
The Probabilistic Method Po-Shen Loh June 2010 1 Warm-up 1. (Russia 1996/4 In the Duma there are 1600 delegates, who have formed 16000 committees of 80 persons each. Prove that one can find two committees
INFORMS is collaborating with JSTOR to digitize, preserve and extend access to Operations Research.
 Order-Picking in a Rectangular Warehouse: A Solvable Case of the Traveling Salesman Problem Author(s): H. Donald Ratliff and Arnon S. Rosenthal Source: Operations Research, Vol. 31, No. 3 (May - Jun.,
Order-Picking in a Rectangular Warehouse: A Solvable Case of the Traveling Salesman Problem Author(s): H. Donald Ratliff and Arnon S. Rosenthal Source: Operations Research, Vol. 31, No. 3 (May - Jun.,
A Fuzzy Logic Approach to Assembly Line Balancing
 Mathware & Soft Computing 12 (2005), 57-74 A Fuzzy Logic Approach to Assembly Line Balancing D.J. Fonseca 1, C.L. Guest 1, M. Elam 1, and C.L. Karr 2 1 Department of Industrial Engineering 2 Department
Mathware & Soft Computing 12 (2005), 57-74 A Fuzzy Logic Approach to Assembly Line Balancing D.J. Fonseca 1, C.L. Guest 1, M. Elam 1, and C.L. Karr 2 1 Department of Industrial Engineering 2 Department
FUTURE communication networks are expected to support
 1146 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL 13, NO 5, OCTOBER 2005 A Scalable Approach to the Partition of QoS Requirements in Unicast and Multicast Ariel Orda, Senior Member, IEEE, and Alexander Sprintson,
1146 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL 13, NO 5, OCTOBER 2005 A Scalable Approach to the Partition of QoS Requirements in Unicast and Multicast Ariel Orda, Senior Member, IEEE, and Alexander Sprintson,
UNIT 3. Greedy Method. Design and Analysis of Algorithms GENERAL METHOD
 UNIT 3 Greedy Method GENERAL METHOD Greedy is the most straight forward design technique. Most of the problems have n inputs and require us to obtain a subset that satisfies some constraints. Any subset
UNIT 3 Greedy Method GENERAL METHOD Greedy is the most straight forward design technique. Most of the problems have n inputs and require us to obtain a subset that satisfies some constraints. Any subset
The Encoding Complexity of Network Coding
 The Encoding Complexity of Network Coding Michael Langberg Alexander Sprintson Jehoshua Bruck California Institute of Technology Email: mikel,spalex,bruck @caltech.edu Abstract In the multicast network
The Encoding Complexity of Network Coding Michael Langberg Alexander Sprintson Jehoshua Bruck California Institute of Technology Email: mikel,spalex,bruck @caltech.edu Abstract In the multicast network
3 INTEGER LINEAR PROGRAMMING
 3 INTEGER LINEAR PROGRAMMING PROBLEM DEFINITION Integer linear programming problem (ILP) of the decision variables x 1,..,x n : (ILP) subject to minimize c x j j n j= 1 a ij x j x j 0 x j integer n j=
3 INTEGER LINEAR PROGRAMMING PROBLEM DEFINITION Integer linear programming problem (ILP) of the decision variables x 1,..,x n : (ILP) subject to minimize c x j j n j= 1 a ij x j x j 0 x j integer n j=
Chapter 3. Set Theory. 3.1 What is a Set?
 Chapter 3 Set Theory 3.1 What is a Set? A set is a well-defined collection of objects called elements or members of the set. Here, well-defined means accurately and unambiguously stated or described. Any
Chapter 3 Set Theory 3.1 What is a Set? A set is a well-defined collection of objects called elements or members of the set. Here, well-defined means accurately and unambiguously stated or described. Any
Integrating Error Detection into Arithmetic Coding
 Integrating Error Detection into Arithmetic Coding Colin Boyd Λ, John G. Cleary, Sean A. Irvine, Ingrid Rinsma-Melchert, Ian H. Witten Department of Computer Science University of Waikato Hamilton New
Integrating Error Detection into Arithmetic Coding Colin Boyd Λ, John G. Cleary, Sean A. Irvine, Ingrid Rinsma-Melchert, Ian H. Witten Department of Computer Science University of Waikato Hamilton New
Crew Scheduling Problem: A Column Generation Approach Improved by a Genetic Algorithm. Santos and Mateus (2007)
") In the name of God Crew Scheduling Problem: A Column Generation Approach Improved by a Genetic Algorithm Spring 2009 Instructor: Dr. Masoud Yaghini Outlines Problem Definition Modeling As A Set Partitioning
In the name of God Crew Scheduling Problem: A Column Generation Approach Improved by a Genetic Algorithm Spring 2009 Instructor: Dr. Masoud Yaghini Outlines Problem Definition Modeling As A Set Partitioning
GT HEURISTIC FOR SOLVING MULTI OBJECTIVE JOB SHOP SCHEDULING PROBLEMS
 GT HEURISTIC FOR SOLVING MULTI OBJECTIVE JOB SHOP SCHEDULING PROBLEMS M. Chandrasekaran 1, D. Lakshmipathy 1 and P. Sriramya 2 1 Department of Mechanical Engineering, Vels University, Chennai, India 2
GT HEURISTIC FOR SOLVING MULTI OBJECTIVE JOB SHOP SCHEDULING PROBLEMS M. Chandrasekaran 1, D. Lakshmipathy 1 and P. Sriramya 2 1 Department of Mechanical Engineering, Vels University, Chennai, India 2
2386 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 52, NO. 6, JUNE 2006
 2386 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 52, NO. 6, JUNE 2006 The Encoding Complexity of Network Coding Michael Langberg, Member, IEEE, Alexander Sprintson, Member, IEEE, and Jehoshua Bruck,
2386 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 52, NO. 6, JUNE 2006 The Encoding Complexity of Network Coding Michael Langberg, Member, IEEE, Alexander Sprintson, Member, IEEE, and Jehoshua Bruck,
Information Theory and Coding Prof. S. N. Merchant Department of Electrical Engineering Indian Institute of Technology, Bombay
 Information Theory and Coding Prof. S. N. Merchant Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 11 Coding Strategies and Introduction to Huffman Coding The Fundamental
Information Theory and Coding Prof. S. N. Merchant Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 11 Coding Strategies and Introduction to Huffman Coding The Fundamental
6 Distributed data management I Hashing
 6 Distributed data management I Hashing There are two major approaches for the management of data in distributed systems: hashing and caching. The hashing approach tries to minimize the use of communication
6 Distributed data management I Hashing There are two major approaches for the management of data in distributed systems: hashing and caching. The hashing approach tries to minimize the use of communication
Search for an Immobile Entity on a Unit Graph: A Mathematical Programming Approach
 Search for an Immobile Entity on a Unit Graph: A Mathematical Programming Approach by Wanyan Yu and Rajan Batta Department of Industrial and Systems Engineering, 438 Bell Hall University at Buffalo (SUNY),
Search for an Immobile Entity on a Unit Graph: A Mathematical Programming Approach by Wanyan Yu and Rajan Batta Department of Industrial and Systems Engineering, 438 Bell Hall University at Buffalo (SUNY),
BCN Decision and Risk Analysis. Syed M. Ahmed, Ph.D.
 Linear Programming Module Outline Introduction The Linear Programming Model Examples of Linear Programming Problems Developing Linear Programming Models Graphical Solution to LP Problems The Simplex Method
Linear Programming Module Outline Introduction The Linear Programming Model Examples of Linear Programming Problems Developing Linear Programming Models Graphical Solution to LP Problems The Simplex Method
PCP and Hardness of Approximation
 PCP and Hardness of Approximation January 30, 2009 Our goal herein is to define and prove basic concepts regarding hardness of approximation. We will state but obviously not prove a PCP theorem as a starting
PCP and Hardness of Approximation January 30, 2009 Our goal herein is to define and prove basic concepts regarding hardness of approximation. We will state but obviously not prove a PCP theorem as a starting
of optimization problems. In this chapter, it is explained that what network design
 CHAPTER 2 Network Design Network design is one of the most important and most frequently encountered classes of optimization problems. In this chapter, it is explained that what network design is? The
CHAPTER 2 Network Design Network design is one of the most important and most frequently encountered classes of optimization problems. In this chapter, it is explained that what network design is? The
Trees. 3. (Minimally Connected) G is connected and deleting any of its edges gives rise to a disconnected graph.
 G is connected and deleting any of its edges gives rise to a disconnected graph.") Trees 1 Introduction Trees are very special kind of (undirected) graphs. Formally speaking, a tree is a connected graph that is acyclic. 1 This definition has some drawbacks: given a graph it is not trivial
Trees 1 Introduction Trees are very special kind of (undirected) graphs. Formally speaking, a tree is a connected graph that is acyclic. 1 This definition has some drawbacks: given a graph it is not trivial
APPROXIMATING A PARALLEL TASK SCHEDULE USING LONGEST PATH
 APPROXIMATING A PARALLEL TASK SCHEDULE USING LONGEST PATH Daniel Wespetal Computer Science Department University of Minnesota-Morris wesp0006@mrs.umn.edu Joel Nelson Computer Science Department University
APPROXIMATING A PARALLEL TASK SCHEDULE USING LONGEST PATH Daniel Wespetal Computer Science Department University of Minnesota-Morris wesp0006@mrs.umn.edu Joel Nelson Computer Science Department University
Approximation Algorithms
 Approximation Algorithms Given an NP-hard problem, what should be done? Theory says you're unlikely to find a poly-time algorithm. Must sacrifice one of three desired features. Solve problem to optimality.
Approximation Algorithms Given an NP-hard problem, what should be done? Theory says you're unlikely to find a poly-time algorithm. Must sacrifice one of three desired features. Solve problem to optimality.
Approximation Algorithms
 Approximation Algorithms Prof. Tapio Elomaa tapio.elomaa@tut.fi Course Basics A 4 credit unit course Part of Theoretical Computer Science courses at the Laboratory of Mathematics There will be 4 hours
Approximation Algorithms Prof. Tapio Elomaa tapio.elomaa@tut.fi Course Basics A 4 credit unit course Part of Theoretical Computer Science courses at the Laboratory of Mathematics There will be 4 hours
The Generalized Weapon Target Assignment Problem
 10th International Command and Control Research and Technology Symposium The Future of C2 June 13-16, 2005, McLean, VA The Generalized Weapon Target Assignment Problem Jay M. Rosenberger Hee Su Hwang Ratna
10th International Command and Control Research and Technology Symposium The Future of C2 June 13-16, 2005, McLean, VA The Generalized Weapon Target Assignment Problem Jay M. Rosenberger Hee Su Hwang Ratna
The Paired Assignment Problem
 Open Journal of Discrete Mathematics, 04, 4, 44-54 Published Online April 04 in SciRes http://wwwscirporg/ournal/odm http://dxdoiorg/0436/odm044007 The Paired Assignment Problem Vardges Melkonian Department
Open Journal of Discrete Mathematics, 04, 4, 44-54 Published Online April 04 in SciRes http://wwwscirporg/ournal/odm http://dxdoiorg/0436/odm044007 The Paired Assignment Problem Vardges Melkonian Department
Some Applications of Graph Bandwidth to Constraint Satisfaction Problems
 Some Applications of Graph Bandwidth to Constraint Satisfaction Problems Ramin Zabih Computer Science Department Stanford University Stanford, California 94305 Abstract Bandwidth is a fundamental concept
Some Applications of Graph Bandwidth to Constraint Satisfaction Problems Ramin Zabih Computer Science Department Stanford University Stanford, California 94305 Abstract Bandwidth is a fundamental concept
Constructing arbitrarily large graphs with a specified number of Hamiltonian cycles
 Electronic Journal of Graph Theory and Applications 4 (1) (2016), 18 25 Constructing arbitrarily large graphs with a specified number of Hamiltonian cycles Michael School of Computer Science, Engineering
Electronic Journal of Graph Theory and Applications 4 (1) (2016), 18 25 Constructing arbitrarily large graphs with a specified number of Hamiltonian cycles Michael School of Computer Science, Engineering
Lecture 7: Asymmetric K-Center
 Advanced Approximation Algorithms (CMU 18-854B, Spring 008) Lecture 7: Asymmetric K-Center February 5, 007 Lecturer: Anupam Gupta Scribe: Jeremiah Blocki In this lecture, we will consider the K-center
Advanced Approximation Algorithms (CMU 18-854B, Spring 008) Lecture 7: Asymmetric K-Center February 5, 007 Lecturer: Anupam Gupta Scribe: Jeremiah Blocki In this lecture, we will consider the K-center
Surrogate Gradient Algorithm for Lagrangian Relaxation 1,2
 Surrogate Gradient Algorithm for Lagrangian Relaxation 1,2 X. Zhao 3, P. B. Luh 4, and J. Wang 5 Communicated by W.B. Gong and D. D. Yao 1 This paper is dedicated to Professor Yu-Chi Ho for his 65th birthday.
Surrogate Gradient Algorithm for Lagrangian Relaxation 1,2 X. Zhao 3, P. B. Luh 4, and J. Wang 5 Communicated by W.B. Gong and D. D. Yao 1 This paper is dedicated to Professor Yu-Chi Ho for his 65th birthday.
Design of Flexible Assembly Line to Minimize Equipment Cost
 Design of Flexible Assembly Line to Minimize Equipment Cost Joseph Bukchin Department of Industrial Engineering Faculty of Engineering, Tel-Aviv University, Tel-Aviv 69978 ISRAEL Tel: 972-3-640794; Fax:
Design of Flexible Assembly Line to Minimize Equipment Cost Joseph Bukchin Department of Industrial Engineering Faculty of Engineering, Tel-Aviv University, Tel-Aviv 69978 ISRAEL Tel: 972-3-640794; Fax:
flow shop scheduling with multiple operations and time lags
 flow shop scheduling with multiple operations and time lags J. Riezebos and G.J.C. Gaalman Faculty of Management and Organization, University of Groningen J.N.D. Gupta Department of Management, Ball State
flow shop scheduling with multiple operations and time lags J. Riezebos and G.J.C. Gaalman Faculty of Management and Organization, University of Groningen J.N.D. Gupta Department of Management, Ball State
Chapter 2 Basic Structure of High-Dimensional Spaces
 Chapter 2 Basic Structure of High-Dimensional Spaces Data is naturally represented geometrically by associating each record with a point in the space spanned by the attributes. This idea, although simple,
Chapter 2 Basic Structure of High-Dimensional Spaces Data is naturally represented geometrically by associating each record with a point in the space spanned by the attributes. This idea, although simple,
Bits, Words, and Integers
 Computer Science 52 Bits, Words, and Integers Spring Semester, 2017 In this document, we look at how bits are organized into meaningful data. In particular, we will see the details of how integers are
Computer Science 52 Bits, Words, and Integers Spring Semester, 2017 In this document, we look at how bits are organized into meaningful data. In particular, we will see the details of how integers are
arxiv:cs/ v1 [cs.ds] 20 Feb 2003
![arxiv:cs/ v1 [cs.ds] 20 Feb 2003](/thumbs/82/85921811.jpg "arxiv:cs/ v1 [cs.ds] 20 Feb 2003") The Traveling Salesman Problem for Cubic Graphs David Eppstein School of Information & Computer Science University of California, Irvine Irvine, CA 92697-3425, USA eppstein@ics.uci.edu arxiv:cs/0302030v1
The Traveling Salesman Problem for Cubic Graphs David Eppstein School of Information & Computer Science University of California, Irvine Irvine, CA 92697-3425, USA eppstein@ics.uci.edu arxiv:cs/0302030v1
6.034 Notes: Section 3.1
 6.034 Notes: Section 3.1 Slide 3.1.1 In this presentation, we'll take a look at the class of problems called Constraint Satisfaction Problems (CSPs). CSPs arise in many application areas: they can be used
6.034 Notes: Section 3.1 Slide 3.1.1 In this presentation, we'll take a look at the class of problems called Constraint Satisfaction Problems (CSPs). CSPs arise in many application areas: they can be used
Constraint Satisfaction Problems
 Constraint Satisfaction Problems CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2013 Soleymani Course material: Artificial Intelligence: A Modern Approach, 3 rd Edition,
Constraint Satisfaction Problems CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2013 Soleymani Course material: Artificial Intelligence: A Modern Approach, 3 rd Edition,
CMPSCI611: The Simplex Algorithm Lecture 24
 CMPSCI611: The Simplex Algorithm Lecture 24 Let s first review the general situation for linear programming problems. Our problem in standard form is to choose a vector x R n, such that x 0 and Ax = b,
CMPSCI611: The Simplex Algorithm Lecture 24 Let s first review the general situation for linear programming problems. Our problem in standard form is to choose a vector x R n, such that x 0 and Ax = b,
Multiway Blockwise In-place Merging
 Multiway Blockwise In-place Merging Viliam Geffert and Jozef Gajdoš Institute of Computer Science, P.J.Šafárik University, Faculty of Science Jesenná 5, 041 54 Košice, Slovak Republic viliam.geffert@upjs.sk,
Multiway Blockwise In-place Merging Viliam Geffert and Jozef Gajdoš Institute of Computer Science, P.J.Šafárik University, Faculty of Science Jesenná 5, 041 54 Košice, Slovak Republic viliam.geffert@upjs.sk,
Metaheuristic Optimization with Evolver, Genocop and OptQuest
 Metaheuristic Optimization with Evolver, Genocop and OptQuest MANUEL LAGUNA Graduate School of Business Administration University of Colorado, Boulder, CO 80309-0419 Manuel.Laguna@Colorado.EDU Last revision:
Metaheuristic Optimization with Evolver, Genocop and OptQuest MANUEL LAGUNA Graduate School of Business Administration University of Colorado, Boulder, CO 80309-0419 Manuel.Laguna@Colorado.EDU Last revision:
Group Strategyproof Mechanisms via Primal-Dual Algorithms. Key Points to Discuss
 Group Strategyproof Mechanisms via Primal-Dual Algorithms Martin Pál and Éva Tardos (2003) Key Points to Discuss The Cost-Sharing Problem Metric Facility Location Single Source Rent-or-Buy Definition of
Group Strategyproof Mechanisms via Primal-Dual Algorithms Martin Pál and Éva Tardos (2003) Key Points to Discuss The Cost-Sharing Problem Metric Facility Location Single Source Rent-or-Buy Definition of
Switching Using Parallel Input Output Queued Switches With No Speedup
 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 10, NO. 5, OCTOBER 2002 653 Switching Using Parallel Input Output Queued Switches With No Speedup Saad Mneimneh, Vishal Sharma, Senior Member, IEEE, and Kai-Yeung
IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 10, NO. 5, OCTOBER 2002 653 Switching Using Parallel Input Output Queued Switches With No Speedup Saad Mneimneh, Vishal Sharma, Senior Member, IEEE, and Kai-Yeung
AtCoder World Tour Finals 2019
 AtCoder World Tour Finals 201 writer: rng 58 February 21st, 2018 A: Magic Suppose that the magician moved the treasure in the order y 1 y 2 y K+1. Here y i y i+1 for each i because it doesn t make sense
AtCoder World Tour Finals 201 writer: rng 58 February 21st, 2018 A: Magic Suppose that the magician moved the treasure in the order y 1 y 2 y K+1. Here y i y i+1 for each i because it doesn t make sense
Toward the joint design of electronic and optical layer protection
 Toward the joint design of electronic and optical layer protection Massachusetts Institute of Technology Slide 1 Slide 2 CHALLENGES: - SEAMLESS CONNECTIVITY - MULTI-MEDIA (FIBER,SATCOM,WIRELESS) - HETEROGENEOUS
Toward the joint design of electronic and optical layer protection Massachusetts Institute of Technology Slide 1 Slide 2 CHALLENGES: - SEAMLESS CONNECTIVITY - MULTI-MEDIA (FIBER,SATCOM,WIRELESS) - HETEROGENEOUS
Lecture 2 The k-means clustering problem
 CSE 29: Unsupervised learning Spring 2008 Lecture 2 The -means clustering problem 2. The -means cost function Last time we saw the -center problem, in which the input is a set S of data points and the
CSE 29: Unsupervised learning Spring 2008 Lecture 2 The -means clustering problem 2. The -means cost function Last time we saw the -center problem, in which the input is a set S of data points and the