Probabilistic Robotics
|
|
|
- Ethelbert Goodman
- 6 years ago
- Views:
Transcription
1 Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1

2 Probabilistic Localization 2

3 Piecewise Constant 3
4 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter( Bel(x),d ): 2. η=0 3. If d is a perceptual data item z then 4. For all x do For all x do Else if d is an action data item u then 10. For all x do Return Bel (x) 4
5 Piecewise Constant Representation 5
6 Implementation (1) To update the belief upon sensory input and to carry out the normalization one has to iterate over all cells of the grid. Especially when the belief is peaked (which is generally the case during position tracking), one wants to avoid updating irrelevant aspects of the state space. One approach is not to update entire sub-spaces of the state space. This, however, requires to monitor whether the robot is de-localized or not. To achieve this, one can consider the likelihood of the observations given the active components of the state space. 6
7 Implementation (2) To efficiently update the belief upon robot motions, one typically assumes a bounded Gaussian model for the motion uncertainty. This reduces the update cost from O(n 2 ) to O(n), where n is the number of states. The update can also be realized by shifting the data in the grid according to the measured motion. In a second step, the grid is then convolved using a separable Gaussian Kernel. Two-dimensional example: 1/16 1/8 1/16 1/4 1/8 1/4 1/8 1/2 + 1/4 1/2 1/4 1/16 1/8 1/16 1/4 Fewer arithmetic operations Easier to implement 7



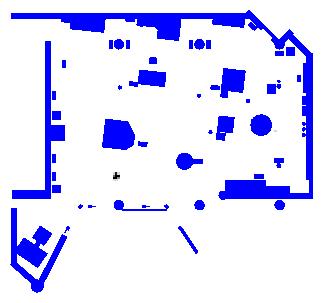

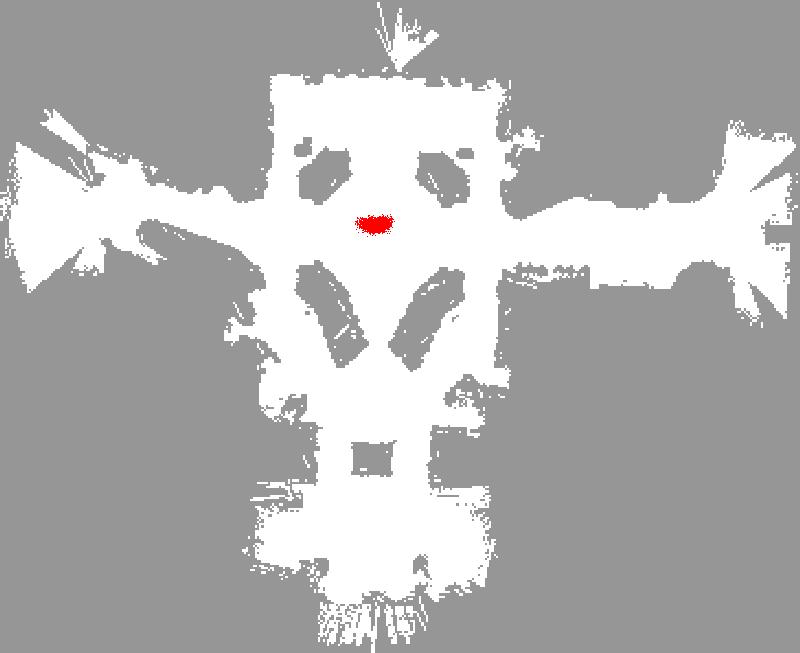
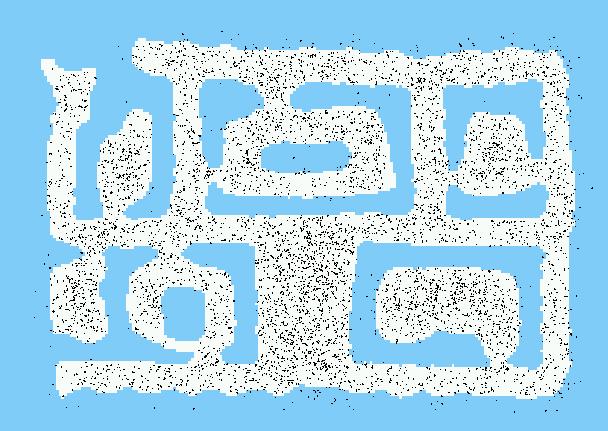
8 Grid-based Localization 8

9 Application Example: Rhino 9


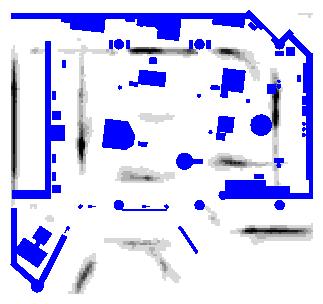
10 Sonars and Occupancy Grid Map 10
11 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity Fixed resolution (does not adapt to the belief) Particle filters are a way to efficiently represent non-gaussian distribution Basic principle Set of state hypotheses ( particles ) Survival-of-the-fittest 14
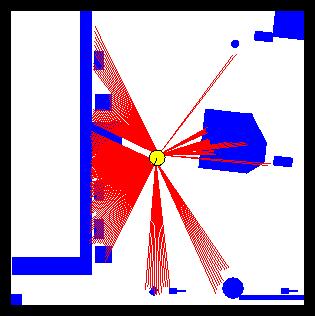
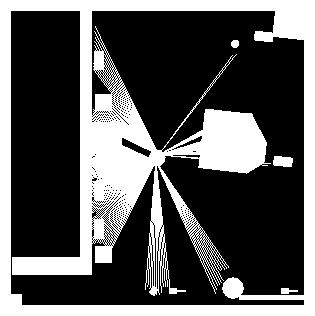
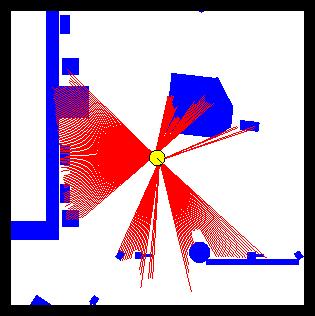
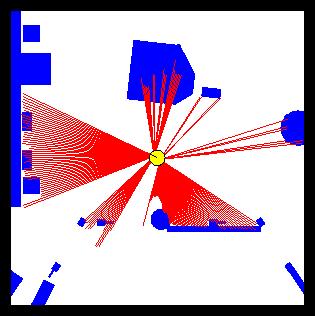
12 Sample-based Localization (sonar)
13 Mathematical Description Set of weighted samples State hypothesis Importance weight The samples represent the posterior 16
14 Function Approximation Particle sets can be used to approximate functions The more particles fall into an interval, the higher the probability of that interval How to draw samples form a function/distribution? 17
15 Rejection Sampling Let us assume that f(x)<1 for all x Sample x from a uniform distribution Sample c from [0,1] if f(x) > c keep the sample otherwise reject the sampe c x f(x) x f(x ) c OK 18
16 Importance Sampling Principle We can even use a different distribution g to generate samples from f By introducing an importance weight w, we can account for the differences between g and f w = f / g f is often called target g is often called proposal Pre-condition: f(x)>0 g(x)>0 19
17 Particle Filters
18 Sensor Information: Importance Sampling
19 Robot Motion

20 Sensor Information: Importance Sampling
21 Robot Motion
22 Particle Filter Algorithm Sample the next generation for particles using the proposal distribution Compute the importance weights : weight = target distribution / proposal distribution Resampling: Replace unlikely samples by more likely ones [Derivation of the MCL equations on the blackboard] 31
23 Particle Filter Algorithm 1. Algorithm particle_filter( S t-1, u t-1 z t ): For Generate new samples 4. Sample index j(i) from the discrete distribution given by w t-1 5. Sample from using and 6. Compute importance weight 7. Update normalization factor 8. Insert 9. For 10. Normalize weights 32
24 Particle Filter Algorithm Importance factor for x i t : draw x i t 1 from Bel(x t 1 ) draw x i t from p(x t xi t 1,u t 1 )
25 Resampling Given: Set S of weighted samples. Wanted : Random sample, where the probability of drawing x i is given by w i. Typically done n times with replacement to generate new sample set S.
26 Resampling W n-1 w n w 1 w 2 W n-1 w n w 1 w 2 w 3 w 3 Roulette wheel Binary search, n log n Stochastic universal sampling Systematic resampling Linear time complexity Easy to implement, low variance
27 Resampling Algorithm 1. Algorithm systematic_resampling(s,n): For Generate cdf u 1 ~ U[0,n 1 ], i =1 Initialize threshold 6. For Draw samples 7. While ( ) Skip until next threshold reached Insert 10. Increment threshold 11. Return S Also called stochastic universal sampling
28 Mobile Robot Localization Each particle is a potential pose of the robot Proposal distribution is the motion model of the robot (prediction step) The observation model is used to compute the importance weight (correction step) [For details, see PDF file on the lecture web page] 37
29 Motion Model Reminder Start
30 Proximity Sensor Model Reminder Laser sensor Sonar sensor
31 40
32 41
33 42
34 43
35 44
36 45
37 46
38 47
39 48
40 49
41 50
42 51
43 52
44 53
45 54
46 55
47 56
48 57

49 Sample-based Localization (sonar) 58
50 Initial Distribution 59

51 After Incorporating Ten Ultrasound Scans 60
52 After Incorporating 65 Ultrasound Scans 61

53 Estimated Path 62


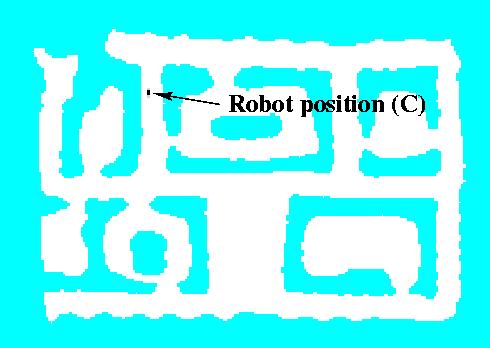
54 Vision-based Localization z P(z x) h(x)


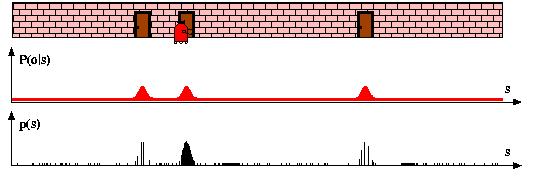
55 Under a Light Measurement z: P(z x):

56 Next to a Light Measurement z: P(z x):
57 Elsewhere Measurement z: P(z x):

58 Global Localization Using Vision
59 Limitations The approach described so far is able to track the pose of a mobile robot and to globally localize the robot. How can we deal with localization errors (i.e., the kidnapped robot problem)? 70
60 Approaches Randomly insert samples (the robot can be teleported at any point in time). Insert random samples proportional to the average likelihood of the particles (the robot has been teleported with higher probability when the likelihood of its observations drops). 71
61 Summary Particle Filters Particle filters are an implementation of recursive Bayesian filtering They represent the posterior by a set of weighted samples They can model non-gaussian distributions Proposal to draw new samples Weight to account for the differences between the proposal and the target Monte Carlo filter, Survival of the fittest, Condensation, Bootstrap filter 72
62 Summary PF Localization In the context of localization, the particles are propagated according to the motion model. They are then weighted according to the likelihood of the observations. In a re-sampling step, new particles are drawn with a probability proportional to the likelihood of the observation. 73
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization. Wolfram Burgard
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
AUTONOMOUS SYSTEMS. PROBABILISTIC LOCALIZATION Monte Carlo Localization
 AUTONOMOUS SYSTEMS PROBABILISTIC LOCALIZATION Monte Carlo Localization Maria Isabel Ribeiro Pedro Lima With revisions introduced by Rodrigo Ventura Instituto Superior Técnico/Instituto de Sistemas e Robótica
AUTONOMOUS SYSTEMS PROBABILISTIC LOCALIZATION Monte Carlo Localization Maria Isabel Ribeiro Pedro Lima With revisions introduced by Rodrigo Ventura Instituto Superior Técnico/Instituto de Sistemas e Robótica
This chapter explains two techniques which are frequently used throughout
 Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Introduction to Mobile Robotics SLAM Grid-based FastSLAM. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Monte Carlo Localization using Dynamically Expanding Occupancy Grids. Karan M. Gupta
 1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Monte Carlo Localization for Mobile Robots
 Monte Carlo Localization for Mobile Robots Frank Dellaert 1, Dieter Fox 2, Wolfram Burgard 3, Sebastian Thrun 4 1 Georgia Institute of Technology 2 University of Washington 3 University of Bonn 4 Carnegie
Monte Carlo Localization for Mobile Robots Frank Dellaert 1, Dieter Fox 2, Wolfram Burgard 3, Sebastian Thrun 4 1 Georgia Institute of Technology 2 University of Washington 3 University of Bonn 4 Carnegie
Adapting the Sample Size in Particle Filters Through KLD-Sampling
 Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Particle Filter in Brief. Robot Mapping. FastSLAM Feature-based SLAM with Particle Filters. Particle Representation. Particle Filter Algorithm
 Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM
 Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Adapting the Sample Size in Particle Filters Through KLD-Sampling
 Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Monte Carlo Localization
 Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM
 CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
Tracking Multiple Moving Objects with a Mobile Robot
 Tracking Multiple Moving Objects with a Mobile Robot Dirk Schulz 1 Wolfram Burgard 2 Dieter Fox 3 Armin B. Cremers 1 1 University of Bonn, Computer Science Department, Germany 2 University of Freiburg,
Tracking Multiple Moving Objects with a Mobile Robot Dirk Schulz 1 Wolfram Burgard 2 Dieter Fox 3 Armin B. Cremers 1 1 University of Bonn, Computer Science Department, Germany 2 University of Freiburg,
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Final project: 45% of the grade, 10% presentation, 35% write-up. Presentations: in lecture Dec 1 and schedule:
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Announcements. Recap Landmark based SLAM. Types of SLAM-Problems. Occupancy Grid Maps. Grid-based SLAM. Page 1. CS 287: Advanced Robotics Fall 2009
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Robust Monte Carlo Localization for Mobile Robots
 To appear in Artificial Intelligence, Summer 2001 Robust Monte Carlo Localization for Mobile Robots Sebastian Thrun, Dieter Fox y, Wolfram Burgard z, and Frank Dellaert School of Computer Science, Carnegie
To appear in Artificial Intelligence, Summer 2001 Robust Monte Carlo Localization for Mobile Robots Sebastian Thrun, Dieter Fox y, Wolfram Burgard z, and Frank Dellaert School of Computer Science, Carnegie
Robot Mapping. Grid Maps. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Computer Vision 2 Lecture 8
 Computer Vision 2 Lecture 8 Multi-Object Tracking (30.05.2016) leibe@vision.rwth-aachen.de, stueckler@vision.rwth-aachen.de RWTH Aachen University, Computer Vision Group http://www.vision.rwth-aachen.de
Computer Vision 2 Lecture 8 Multi-Object Tracking (30.05.2016) leibe@vision.rwth-aachen.de, stueckler@vision.rwth-aachen.de RWTH Aachen University, Computer Vision Group http://www.vision.rwth-aachen.de
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Artificial Intelligence for Robotics: A Brief Summary
 Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Mobile Robot Mapping and Localization in Non-Static Environments
 Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares. Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz
 Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Localization, Mapping and Exploration with Multiple Robots. Dr. Daisy Tang
 Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Introduction to Mobile Robotics Gaussian Processes Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann SS08, University of Freiburg, Department for Computer Science Announcement
Introduction to Mobile Robotics Path Planning and Collision Avoidance
 Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Motion Planning Latombe (1991): eminently necessary
Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Motion Planning Latombe (1991): eminently necessary
Introduction to Mobile Robotics Multi-Robot Exploration
 Introduction to Mobile Robotics Multi-Robot Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras Exploration The approaches seen so far are purely passive. Given an unknown environment,
Introduction to Mobile Robotics Multi-Robot Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras Exploration The approaches seen so far are purely passive. Given an unknown environment,
7630 Autonomous Robotics Probabilities for Robotics
 7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
Markov Localization for Mobile Robots in Dynaic Environments
 Markov Localization for Mobile Robots in Dynaic Environments http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume11/fox99a-html/jair-localize.html Next: Introduction Journal of Artificial Intelligence
Markov Localization for Mobile Robots in Dynaic Environments http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume11/fox99a-html/jair-localize.html Next: Introduction Journal of Artificial Intelligence
SLAM: Robotic Simultaneous Location and Mapping
 SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT. Full Paper
 USING DIFFERENTIAL DRIVE MOBILE ROBOT. Full Paper") Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT Norhidayah Mohamad Yatim a,b, Norlida Buniyamin a a Faculty of Engineering, Universiti
Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT Norhidayah Mohamad Yatim a,b, Norlida Buniyamin a a Faculty of Engineering, Universiti
Statistical Techniques in Robotics (16-831, F10) Lecture #02 (Thursday, August 28) Bayes Filtering
 Lecture #02 (Thursday, August 28) Bayes Filtering") Statistical Techniques in Robotics (16-831, F10) Lecture #02 (Thursday, August 28) Bayes Filtering Lecturer: Drew Bagnell Scribes: Pranay Agrawal, Trevor Decker, and Humphrey Hu 1 1 A Brief Example Let
Statistical Techniques in Robotics (16-831, F10) Lecture #02 (Thursday, August 28) Bayes Filtering Lecturer: Drew Bagnell Scribes: Pranay Agrawal, Trevor Decker, and Humphrey Hu 1 1 A Brief Example Let
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Clustering Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann Clustering (1) Common technique for statistical data analysis (machine learning,
Introduction to Mobile Robotics Clustering Wolfram Burgard Cyrill Stachniss Giorgio Grisetti Maren Bennewitz Christian Plagemann Clustering (1) Common technique for statistical data analysis (machine learning,
Introduction to Mobile Robotics Probabilistic Motion Models
 Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? Dynamic
Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? Dynamic
Fox, Burgard & Thrun problem they attack. Tracking or local techniques aim at compensating odometric errors occurring during robot navigation. They re
 Journal of Artificial Intelligence Research 11 (1999) 391-427 Submitted 1/99; published 11/99 Markov Localization for Mobile Robots in Dynamic Environments Dieter Fox Computer Science Department and Robotics
Journal of Artificial Intelligence Research 11 (1999) 391-427 Submitted 1/99; published 11/99 Markov Localization for Mobile Robots in Dynamic Environments Dieter Fox Computer Science Department and Robotics
Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping
 Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Motivation: Analogy to Documents O f a l l t h e s e
Advanced Techniques for Mobile Robotics Bag-of-Words Models & Appearance-Based Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Motivation: Analogy to Documents O f a l l t h e s e
Monte Carlo Localization for Mobile Robots
 Monte Carlo Localization for Mobile Robots Frank Dellaert y Dieter Fox y Wolfram Burgard z Sebastian Thrun y y Computer Science Department, Carnegie Mellon University, Pittsburgh PA 15213 z Institute of
Monte Carlo Localization for Mobile Robots Frank Dellaert y Dieter Fox y Wolfram Burgard z Sebastian Thrun y y Computer Science Department, Carnegie Mellon University, Pittsburgh PA 15213 z Institute of
Robust Monte-Carlo Localization using Adaptive Likelihood Models
 Robust Monte-Carlo Localization using Adaptive Likelihood Models Patrick Pfaff 1, Wolfram Burgard 1, and Dieter Fox 2 1 Department of Computer Science, University of Freiburg, Germany, {pfaff,burgard}@informatik.uni-freiburg.de
Robust Monte-Carlo Localization using Adaptive Likelihood Models Patrick Pfaff 1, Wolfram Burgard 1, and Dieter Fox 2 1 Department of Computer Science, University of Freiburg, Germany, {pfaff,burgard}@informatik.uni-freiburg.de
Tracking Algorithms. Lecture16: Visual Tracking I. Probabilistic Tracking. Joint Probability and Graphical Model. Deterministic methods
 Tracking Algorithms CSED441:Introduction to Computer Vision (2017F) Lecture16: Visual Tracking I Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Deterministic methods Given input video and current state,
Tracking Algorithms CSED441:Introduction to Computer Vision (2017F) Lecture16: Visual Tracking I Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Deterministic methods Given input video and current state,
Robotics. Chapter 25-b. Chapter 25-b 1
 Robotics Chapter 25-b Chapter 25-b 1 Particle Filtering Particle filtering uses a population of particles (each particle is a state estimate) to localize a robot s position. This is called Monte Carlo
Robotics Chapter 25-b Chapter 25-b 1 Particle Filtering Particle filtering uses a population of particles (each particle is a state estimate) to localize a robot s position. This is called Monte Carlo
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
Overview. Monte Carlo Methods. Statistics & Bayesian Inference Lecture 3. Situation At End Of Last Week
 Statistics & Bayesian Inference Lecture 3 Joe Zuntz Overview Overview & Motivation Metropolis Hastings Monte Carlo Methods Importance sampling Direct sampling Gibbs sampling Monte-Carlo Markov Chains Emcee
Statistics & Bayesian Inference Lecture 3 Joe Zuntz Overview Overview & Motivation Metropolis Hastings Monte Carlo Methods Importance sampling Direct sampling Gibbs sampling Monte-Carlo Markov Chains Emcee
GT "Calcul Ensembliste"
 GT "Calcul Ensembliste" Beyond the bounded error framework for non linear state estimation Fahed Abdallah Université de Technologie de Compiègne 9 Décembre 2010 Fahed Abdallah GT "Calcul Ensembliste" 9
GT "Calcul Ensembliste" Beyond the bounded error framework for non linear state estimation Fahed Abdallah Université de Technologie de Compiègne 9 Décembre 2010 Fahed Abdallah GT "Calcul Ensembliste" 9
Mini-Project II. Monte Carlo Localisation for mobile robots
 The University of Birmingham School of Computer Science MSc in Advanced Computer Science Mini-Project II Monte Carlo Localisation for mobile robots Marek Kopicki Supervisor: Dr Jeremy Wyatt April 26, 2004
The University of Birmingham School of Computer Science MSc in Advanced Computer Science Mini-Project II Monte Carlo Localisation for mobile robots Marek Kopicki Supervisor: Dr Jeremy Wyatt April 26, 2004
From Par(cle Filters to Malliavin Filtering with Applica(on to Target Tracking Sérgio Pequito Phd Student
 From Par(cle Filters to Malliavin Filtering with Applica(on to Target Tracking Sérgio Pequito Phd Student Final project of Detection, Estimation and Filtering course July 7th, 2010 Guidelines Mo(va(on
From Par(cle Filters to Malliavin Filtering with Applica(on to Target Tracking Sérgio Pequito Phd Student Final project of Detection, Estimation and Filtering course July 7th, 2010 Guidelines Mo(va(on
AUTONOMOUS SYSTEMS. LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping
 AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
Evaluation of Moving Object Tracking Techniques for Video Surveillance Applications
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
Using Artificial Landmarks to Reduce the Ambiguity in the Environment of a Mobile Robot
 Using Artificial Landmarks to Reduce the Ambiguity in the Environment of a Mobile Robot Daniel Meyer-Delius Maximilian Beinhofer Alexander Kleiner Wolfram Burgard Abstract Robust and reliable localization
Using Artificial Landmarks to Reduce the Ambiguity in the Environment of a Mobile Robot Daniel Meyer-Delius Maximilian Beinhofer Alexander Kleiner Wolfram Burgard Abstract Robust and reliable localization
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
Particle Filters for Visual Tracking
 Particle Filters for Visual Tracking T. Chateau, Pascal Institute, Clermont-Ferrand 1 Content Particle filtering: a probabilistic framework SIR particle filter MCMC particle filter RJMCMC particle filter
Particle Filters for Visual Tracking T. Chateau, Pascal Institute, Clermont-Ferrand 1 Content Particle filtering: a probabilistic framework SIR particle filter MCMC particle filter RJMCMC particle filter
Modeling and Reasoning with Bayesian Networks. Adnan Darwiche University of California Los Angeles, CA
 Modeling and Reasoning with Bayesian Networks Adnan Darwiche University of California Los Angeles, CA darwiche@cs.ucla.edu June 24, 2008 Contents Preface 1 1 Introduction 1 1.1 Automated Reasoning........................
Modeling and Reasoning with Bayesian Networks Adnan Darwiche University of California Los Angeles, CA darwiche@cs.ucla.edu June 24, 2008 Contents Preface 1 1 Introduction 1 1.1 Automated Reasoning........................
Navigation methods and systems
 Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Gaussian Processes for Robotics. McGill COMP 765 Oct 24 th, 2017
 Gaussian Processes for Robotics McGill COMP 765 Oct 24 th, 2017 A robot must learn Modeling the environment is sometimes an end goal: Space exploration Disaster recovery Environmental monitoring Other
Gaussian Processes for Robotics McGill COMP 765 Oct 24 th, 2017 A robot must learn Modeling the environment is sometimes an end goal: Space exploration Disaster recovery Environmental monitoring Other
Simulation: Solving Dynamic Models ABE 5646 Week 12, Spring 2009
 Simulation: Solving Dynamic Models ABE 5646 Week 12, Spring 2009 Week Description Reading Material 12 Mar 23- Mar 27 Uncertainty and Sensitivity Analysis Two forms of crop models Random sampling for stochastic
Simulation: Solving Dynamic Models ABE 5646 Week 12, Spring 2009 Week Description Reading Material 12 Mar 23- Mar 27 Uncertainty and Sensitivity Analysis Two forms of crop models Random sampling for stochastic
Obstacle Avoidance (Local Path Planning)
") 6.2.2 Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
6.2.2 Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
THE classical approach to multiple target tracking (MTT) is
 is") IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 55, NO. 5, MAY 2007 1589 A Bayesian Approach to Multiple Target Detection and Tracking Mark R. Morelande, Christopher M. Kreucher, and Keith Kastella Abstract
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 55, NO. 5, MAY 2007 1589 A Bayesian Approach to Multiple Target Detection and Tracking Mark R. Morelande, Christopher M. Kreucher, and Keith Kastella Abstract
Obstacle Avoidance (Local Path Planning)
") Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Robust Monte Carlo Localization for Mobile Robots
 Robust Monte Carlo Localization for Mobile Robots Sebastian Thrun, Dieter Fox, Wolfram Burgard, and Frank Dellaert April 2000 CMU-CS-00-125 School of Computer Science Carnegie Mellon University Pittsburgh,
Robust Monte Carlo Localization for Mobile Robots Sebastian Thrun, Dieter Fox, Wolfram Burgard, and Frank Dellaert April 2000 CMU-CS-00-125 School of Computer Science Carnegie Mellon University Pittsburgh,
Practical Extensions to Vision-Based Monte Carlo Localization Methods for Robot Soccer Domain
 Practical Extensions to Vision-Based Monte Carlo Localization Methods for Robot Soccer Domain Kemal Kaplan 1, Buluç Çelik 1, Tekin Meriçli 2, Çetin Meriçli 1 and H. Levent Akın 1 1 Boğaziçi University
Practical Extensions to Vision-Based Monte Carlo Localization Methods for Robot Soccer Domain Kemal Kaplan 1, Buluç Çelik 1, Tekin Meriçli 2, Çetin Meriçli 1 and H. Levent Akın 1 1 Boğaziçi University
What is the SLAM problem?
 SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
Particle Attraction Localisation
 Particle Attraction Localisation Damien George (dpgeorge@students.cs.mu.oz.au) Nick Barnes (nmb@cs.mu.oz.au) Dept. Computer Science and Software Engineering The University of Melbourne, Vic, 31, AUSTRALIA
Particle Attraction Localisation Damien George (dpgeorge@students.cs.mu.oz.au) Nick Barnes (nmb@cs.mu.oz.au) Dept. Computer Science and Software Engineering The University of Melbourne, Vic, 31, AUSTRALIA
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching
 Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Introduction to Mobile Robotics Path Planning and Collision Avoidance. Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): is eminently necessary since, by
Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): is eminently necessary since, by
Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping
 Lecture#05 (Wednesday, September 12) Mapping") Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping Lecturer: Alex Styler (in for Drew Bagnell) Scribe: Victor Hwang 1 1 Occupancy Mapping When solving the localization
Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping Lecturer: Alex Styler (in for Drew Bagnell) Scribe: Victor Hwang 1 1 Occupancy Mapping When solving the localization
Monte Carlo Integration
 Lecture 11: Monte Carlo Integration Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2016 Reminder: Quadrature-Based Numerical Integration f(x) Z b a f(x)dx x 0 = a x 1 x 2 x 3 x 4 = b E.g.
Lecture 11: Monte Carlo Integration Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2016 Reminder: Quadrature-Based Numerical Integration f(x) Z b a f(x)dx x 0 = a x 1 x 2 x 3 x 4 = b E.g.
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS. Oliver Wulf, Bernardo Wagner
 USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
USING 3D DATA FOR MONTE CARLO LOCALIZATION IN COMPLEX INDOOR ENVIRONMENTS Oliver Wulf, Bernardo Wagner Institute for Systems Engineering (RTS/ISE), University of Hannover, Germany Mohamed Khalaf-Allah
Humanoid Robotics. Least Squares. Maren Bennewitz
 Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
Grid-Based Models for Dynamic Environments
 Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map
 Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Exploring Unknown Environments with Mobile Robots using Coverage Maps
 Exploring Unknown Environments with Mobile Robots using Coverage Maps Cyrill Stachniss Wolfram Burgard University of Freiburg Department of Computer Science D-79110 Freiburg, Germany * Abstract In this
Exploring Unknown Environments with Mobile Robots using Coverage Maps Cyrill Stachniss Wolfram Burgard University of Freiburg Department of Computer Science D-79110 Freiburg, Germany * Abstract In this
Robotic Mapping. Outline. Introduction (Tom)
") Outline Robotic Mapping 6.834 Student Lecture Itamar Kahn, Thomas Lin, Yuval Mazor Introduction (Tom) Kalman Filtering (Itamar) J.J. Leonard and H.J.S. Feder. A computationally efficient method for large-scale
Outline Robotic Mapping 6.834 Student Lecture Itamar Kahn, Thomas Lin, Yuval Mazor Introduction (Tom) Kalman Filtering (Itamar) J.J. Leonard and H.J.S. Feder. A computationally efficient method for large-scale
Lesson 3: Particle Filters
 Artificial Intelligence for Robotics Lesson 3: Particle Filters Three Types of Filters Particle Filters are a sequence of algorithms for estimating the state of a system. Of the filters we cover in this
Artificial Intelligence for Robotics Lesson 3: Particle Filters Three Types of Filters Particle Filters are a sequence of algorithms for estimating the state of a system. Of the filters we cover in this
Voronoi Tracking: Location Estimation Using Sparse and Noisy Sensor Data
 Voronoi Tracking: Location Estimation Using Sparse and Noisy Sensor Data Lin Liao, Dieter Fox, Jeffrey Hightower, Henry Kautz, and Dirk Schulz Deptartment of Computer Science & Engineering University of
Voronoi Tracking: Location Estimation Using Sparse and Noisy Sensor Data Lin Liao, Dieter Fox, Jeffrey Hightower, Henry Kautz, and Dirk Schulz Deptartment of Computer Science & Engineering University of
Voronoi Tracking: Location Estimation Using Sparse and Noisy Sensor Data
 Voronoi Tracking: Location Estimation Using Sparse and Noisy Sensor Data Lin Liao, Dieter Fox, Jeffrey Hightower, Henry Kautz, and Dirk Schulz Deptartment of Computer Science & Engineering University of
Voronoi Tracking: Location Estimation Using Sparse and Noisy Sensor Data Lin Liao, Dieter Fox, Jeffrey Hightower, Henry Kautz, and Dirk Schulz Deptartment of Computer Science & Engineering University of
Object Tracking with an Adaptive Color-Based Particle Filter
 Object Tracking with an Adaptive Color-Based Particle Filter Katja Nummiaro 1, Esther Koller-Meier 2, and Luc Van Gool 1,2 1 Katholieke Universiteit Leuven, ESAT/VISICS, Belgium {knummiar,vangool}@esat.kuleuven.ac.be
Object Tracking with an Adaptive Color-Based Particle Filter Katja Nummiaro 1, Esther Koller-Meier 2, and Luc Van Gool 1,2 1 Katholieke Universiteit Leuven, ESAT/VISICS, Belgium {knummiar,vangool}@esat.kuleuven.ac.be
Mobile Robot Map Learning from Range Data in Dynamic Environments
 1 Mobile Robot Map Learning from Range Data in Dynamic Environments Wolfram Burgard 1 Cyrill Stachniss 1,2 Dirk Hähnel 1,3 1 University of Freiburg, Dept. of Computer Science, 79110 Freiburg, Germany 2
1 Mobile Robot Map Learning from Range Data in Dynamic Environments Wolfram Burgard 1 Cyrill Stachniss 1,2 Dirk Hähnel 1,3 1 University of Freiburg, Dept. of Computer Science, 79110 Freiburg, Germany 2
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Mapping and Exploration with Mobile Robots using Coverage Maps
 Mapping and Exploration with Mobile Robots using Coverage Maps Cyrill Stachniss Wolfram Burgard University of Freiburg Department of Computer Science D-79110 Freiburg, Germany {stachnis burgard}@informatik.uni-freiburg.de
Mapping and Exploration with Mobile Robots using Coverage Maps Cyrill Stachniss Wolfram Burgard University of Freiburg Department of Computer Science D-79110 Freiburg, Germany {stachnis burgard}@informatik.uni-freiburg.de
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where