Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017
|
|
|
- Martina Harper
- 6 years ago
- Views:
Transcription

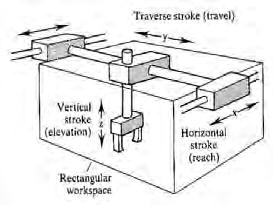
1 Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation Copyright 2017 by Robert Stengel. All rights reserved. For educational use only. 1 Assembly Robot Configurations Cartesian Cylindrical Polar Articulated Revolute McKerrow,


2 Assembly Robot Workspaces Cylindrical Articulated Revolute McKerrow, 1991 Tesla Model S Assembly watch?v=8_lfxpi5obm 3 Serial Robotic Manipulators Proximal link: closer to the base Distal link: farther from the base Serial chain of robotic links and joints! Large workspace! Low stiffness! Cumulative errors from link to link! Proximal links carry the weight and load of distal links! Actuation of proximal joints affects distal links! Limited load-carrying capability at end effecter 4







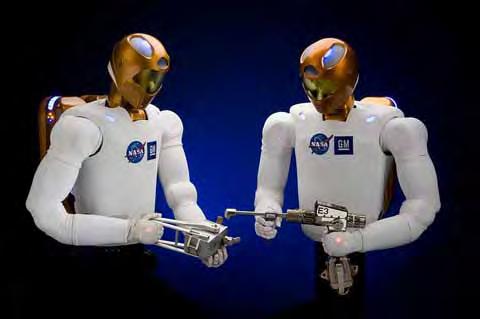
3 Humanoid Robots 5 NASA/GM Robonaut Robonaut v=g3u48t4vx7k 6





4 Disney Audio-Animatronics, Baxter, Sawyer, and the PR2 Baxter v=qhamsalhiv8 PR2 watch?v=hmx1xw2e4gg Sawyer 8




5 Parallel Robotic Mechanisms End plate is directly actuated by multiple links and joints kinematic chains! Restricted workspace! Common link-joint configuration! Light construction! Stiffness! High load-carrying capacity Stewart Platform v=qdko9pywgau Pick-and-Place Robot v=i4obexi2kiq 9 Gearing and Leverage Force multiplication Displacement ratios 10





6 Machine tools! Grinding, sanding! Inserting screws! Drilling! Hammering Paint sprayer Gripper, clamp Multi-digit hand End Effecters DARPA Prosthetic Hand v=qjg9igtnjiofeature=related 11 Links and Joints! 12


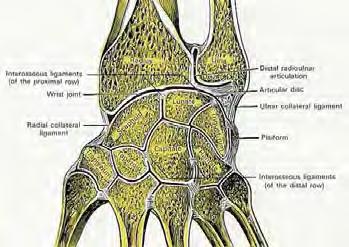
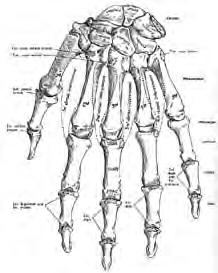




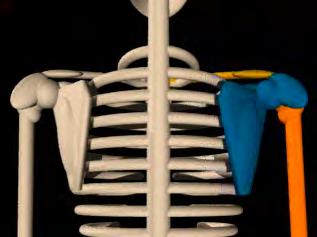
7 Human Joints Gray s Anatomy, 1858 Wrist/Hand Shoulder Elbow Hand/Fingers 13 Skeleton and Muscle- Induced Motion 14



8 Revolute Robotic Joints Rotation about a single axis Parallel to Link Perpendicular to Link 15 Prismatic Robotic Joints Sliding along a single axis 16









9 Universal Spherical or ball Other Robotic Joints Flexible Constant-Velocity Roller Screw Cylindrical sliding and turning composite Planar sliding and turning composite 17 Construction Cranes Pivoted Tower Cranes Balanced Tower Cranes Port Cranes 18





10 Four-Bar Linkage Closed-loop structure Rotational joints Planar motion Proportions of link lengths determine pattern of motion Examples! Double wishbone suspension! Pantograph! Scissor lift! Gripper 19 Characteristic Transformation of a Link Link: solid structure between two joints Each link type has a characteristic transformation matrix relating the proximal joint to the distal joint Link n has! Proximal end: Joint n, coordinate frame n 1! Distal end: Joint n + 1, coordinate frame n Distal Proximal McKerrow,
11 Links Between Revolute Joints Link: solid structure between two joints! Proximal end: closer to the base! Distal end: farther from the base Type 1 Link Two parallel revolute joints 4 Link Parameters! Length of the link between rotational axes, l, along the common normal! Twist angle between axes,!! Angle between 2 links, " revolute! Offset between links, d prismatic Joint Variable: single link parameter that is free to vary Type 2 Link Two non-parallel revolute joints McKerrow, Links Involving Prismatic Joints Type 5 Link Intersecting prismatic joints Type 6 Link Intersecting revolute and prismatic joints Link n extends along z n-1 axis Link n extends along z n-1 axis l n = 0, along x n-1 d n = length, along z n-1 variable! n = 0, about z n-1 " n = fixed orientation of n + 1 prismatic axis about x n-1 l n = 0, along x n-1 d n = length, along z n-1 fixed! n = variable joint angle n about z n-1 " n = fixed orientation of n + 1 prismatic axis about x n-1 22 McKerrow, 1991
12 Links Between Revolute Joints - 2 Type 3 Link Two revolute joints with intersecting rotational axes e.g., shoulder Type 4 Link Two perpendicular revolute joints with common origin e.g., elbow-wrist McKerrow, 1991 Link n extends along z n-1 axis l n = 0, along x n-1 d n = length, along z n-1 fixed! n = variable joint angle n about z n-1 " n = fixed orientation of n + 1 rotational axis about x n-1 Link n extends along -z n axis l n = 0, along x n-1 d n = 0, along z n-1! n = variable joint angle n about z n-1 " n = fixed orientation of n + 1 rotational axis about x n-123 Links Involving Prismatic Joints - 2 Type 7 Link Parallel prismatic and revolute joints Type 8 Link Intersecting prismatic and revolute joints Link n extends along x n-1 axis l n = length along x n-1 d n = 0, along z n-1! n = variable joint angle n about z n-1 " n = 0, orientation of n + 1 prismatic axis about x n-1 McKerrow, 1991 Link n extends along z n-1 axis l n = 0, along x n-1 d n = length, along z n-1 variable! n = 0, about z n-1 " n = fixed orientation of n + 1 rotational axis about x n-1 24



13 Two-Link/Three-Joint Manipulator Parallel Rotation Axes Manipulator in zero position Workspace McKerrow, 1991 Assignment of coordinate frames Parameters and Variables for 2-link manipulator Link lengths fixed Joint angles variable 25 Four-Joint SCARA * Manipulator Arm with Three Revolute Link Variables Joint Angles Operation sbtccyjxo McKerrow, 1991 *Selective Compliant Articulated Robot Arm 26



14 Joint Variables Must Be Actuated and Observed for Control Frames of Reference for Actuation and Control!World coordinates!actuator coordinates!joint coordinates!tool coordinates Rotary Actuators Sensors May Observe Joints Directly, Indirectly, or Not At All Linear Actuator 27 Simulink/SimMechanics Representation of Four-Bar Linkage 28

15 Recall: Homogeneous Transformation s new =! Rotation " Matrix new old! Location of Old " Origin new *,,, s old = A new old s old,, +, Transform from one joint to the next 29 Rotation Matrix can be Derived from Euler Angles or Quaternions! A = " new H old r oldnew ! = " h 11 h 12 h 13 x o h 21 h 22 h 23 y o h 31 h 32 h 33 z o Canadarm2, ISS 30
16 Series of Homogeneous Transformations Two serial transformations can be combined in a single transformation s 2 = A 1 2 A 0 1 s 0 = A 0 2 s 0 Four transformations for SCARA robot s 4 = A 3 4 A 2 3 A 1 2 A 0 1 s 0 = A 0 4 s 0 31 Transformation for a Single Robotic Joint-Link Each joint-link requires four sequential transformations:! Rotation about!! Translation along d! Translation along l! Rotation about " s n+1 = A 3 n+1 A 2 3 A 1 2 A n 1 s n = A n n+1 s n = A! A d A l A " s n = A n n+1 s n Type 2 Link... axes for each transformation along or around must be specified 4 th 3 rd 2 nd 1 st s n+1 = A z n!1," n A z n!1,d n A x n!1,l n A x n!1, n s n = A n+1 n s n 32
17 Denavit-Hartenberg Representation of Joint-Link-Joint Transformation! 33 Denavit-Hartenberg Representation of Joint-Link-Joint Transformation Like Euler angle rotation, transformational effects of the 4 link parameters are defined in a specific application sequence right to left: {", d, l,! } 4 link parameters! Angle between 2 links, " revolute! Distance offset between links, d prismatic! Length of the link between rotational axes, l, along the common normal prismatic! Twist angle between axes,! revolute A n = A z n!1," n A z n!1,d n A x n!1,l n A x n!1, n = Rotz n!1," n Transz n!1,d n Transx n!1,l n Rotx n!1, n! n T n+1 in some references e.g., McKerrow, 1991 Denavit-Hartenberg Demo 34
18 Four Transformations from One Joint to the Next Single Link Rotation of " n about the z n-1 axis cos" n!sin" n 0 0 sin" Rotz n!1," n = n cos" n Translation of l n along the x n-1 axis " l n Transx n!1,l n = Translation of d n along the z n-1 axis " Transz n!1,d n = d n Rotation of! n about the x n-1 axis cos" Rotx n!1," n = n!sin" n 0 0 sin" n cos" n Denavit-Hartenberg Representation of Joint- Link-Joint Transformation Then Then Then First cos" n!sin" n 0 0 A n!1 sin" n = n cos" n d n l n cos n!sin n 0 0 sin n cos n A n n!1 = cos" n!sin" n cos n sin" n sin n l n cos" n sin" n cos" n cos n! cos" n sin n l n sin" n 0 sin n cos n d n
19 Example: Joint-Link-Joint Transformation, Type 1 Link Joint Variable = " n! = variable d = 0 m l = 0.25 m " = 90 deg!! 30 deg d = 0 m l = 0.25 m " = 90 deg A n n!1 = cos" n!sin" n cos n sin" n sin n l n cos" n sin" n cos" n cos n! cos" n sin n l n sin" n 0 sin n cos n d n A n n!1 = A n n!1 = cos" n 0 sin" n 0.25cos" n sin" n 0! cos" n 0.25sin" n " ! Forward and Inverse Transformations Forward transformation: proximal to distal frame Expression of proximal frame in distal frame s 1 = A 0 1 s 0 ; s 2 = A 1 2 s 1 = A 1 2 A 0 1 s 0 = A 0 2 s 0 Reverse transformation: distal to proximal frame = inverse of forward transformation s 0 = A 0 2!1 s 2 = A 2 0 s 2 = A 1 0 A 2 1 s 2 38
20 Homogeneous Transformation Matrix is not Orthonormal A = A 0!1 2 " A 0 T but a useful identity makes inversion simple 39 Matrix Inverse Identity Given: a square matrix, A, and its inverse, B " A = A 1 m!m A 3 n!m A 2 m!n A 4 n!n " B ; B! A 1 1 B 2 = B 3 B 4 Then AB = AA!1 = I m+n " I m 0 = 0 I n A 1 B 2 + A 2 B 4 A 3 B 2 + A 4 B 4 " = A 1 B 1 + A 2 B 3 A 3 B 1 + A 4 B 3 Equating like parts, and solving for B i! " B 1 B 2 B 3 B 4 1 A 1 1 A 2 A 4 A 3 A 1 1 A A 4 A 3 A 1 1 A 2 1! = A 1 A 2 A 1 4 A 3 A 1 4 A 3 A 1 A 2 A 1 4 A " 3 40
21 Apply to Homogeneous Transformation Forward transformation to distal frame! A! " A 1 A 2 A 3 A 4! = " distal H proximal r oproximal Inverse transformation to proximal frame! " distal H proximal r o ! = " B 1 B 2 B 3 B 4! = " proximal H distal H proximal distal r odistal Apply to Homogeneous Transformation Forward transformation! A! " A 1 A 2 A 3 A 4! h 11 h 12 h 13 x o == h 21 h 22 h 23 y o h 31 h 32 h 33 z o " Inverse transformation! " h 11 h 12 h 13 x o h 21 h 22 h 23 y o h 31 h 32 h 33 z o ! = " h 11 h 21 h 31 h 11 x o + h 21 y o + h 31 z o h 12 h 22 h 32 h 12 x o + h 22 y o + h 32 z o h 13 h 23 h 33 h 13 x o + h 23 y o + h 33 z o
22 Next Time:! Transformations, Trajectories, and Path Planning! 43 Supplemental Material! 44

23 Multi-Bar-Linkage Gripper v=ydd6vbx9oqufeature=related 45
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
Forward kinematics and Denavit Hartenburg convention
 Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
6. Kinematics of Serial Chain Manipulators
 6. Kinematics of Serial Chain Manipulators 6.1 Assignment of reference frames In a multi-degree-of-freedom mechanical system consisting of rigid bodies, it is useful to attach reference frames to each
6. Kinematics of Serial Chain Manipulators 6.1 Assignment of reference frames In a multi-degree-of-freedom mechanical system consisting of rigid bodies, it is useful to attach reference frames to each
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
Robotics. SAAST Robotics Robot Arms
 SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
EE Kinematics & Inverse Kinematics
 Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Robotics Configuration of Robot Manipulators
 Robotics Configuration of Robot Manipulators Configurations for Robot Manipulators Cartesian Spherical Cylindrical Articulated Parallel Kinematics I. Cartesian Geometry Also called rectangular, rectilinear,
Robotics Configuration of Robot Manipulators Configurations for Robot Manipulators Cartesian Spherical Cylindrical Articulated Parallel Kinematics I. Cartesian Geometry Also called rectangular, rectilinear,
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 3: Forward and Inverse Kinematics
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
Chapter 2 Mechanisms Abstract
 Chapter 2 Mechanisms Abstract This chapter begins with a description of the different types of mechanisms that are generally used, especially in industrial robots. The parameters and variables of the mechanisms
Chapter 2 Mechanisms Abstract This chapter begins with a description of the different types of mechanisms that are generally used, especially in industrial robots. The parameters and variables of the mechanisms
3. Manipulator Kinematics. Division of Electronic Engineering Prof. Jaebyung Park
 3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
Prof. Mark Yim University of Pennsylvania
 Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions from joint
Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions from joint
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Prof. Mark Yim University of Pennsylvania
 Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom Robo1x-1.5 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions
Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom Robo1x-1.5 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Planar Robot Kinematics
 V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Ch 8 Industrial Robotics
 Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
MEAM 520. More Denavit-Hartenberg (DH)
") MEAM 520 More Denavit-Hartenberg (DH) Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 6: September
MEAM 520 More Denavit-Hartenberg (DH) Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 6: September
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Index Terms Denavit-Hartenberg Parameters, Kinematics, Pick and place robotic arm, Taper roller bearings. III. METHODOLOGY
 ISSN: 39-5967 ISO 9:8 Certified Volume 5, Issue 3, May 6 DESIGN OF A PROTOTYPE OF A PICK AND PLACE ROBOTIC ARM Amod Aboti, Sanket Acharya, Abhinav Anand, Rushikesh Chintale, Vipul Ruiwale Abstract In the
ISSN: 39-5967 ISO 9:8 Certified Volume 5, Issue 3, May 6 DESIGN OF A PROTOTYPE OF A PICK AND PLACE ROBOTIC ARM Amod Aboti, Sanket Acharya, Abhinav Anand, Rushikesh Chintale, Vipul Ruiwale Abstract In the
Mechanical structure of a robot=skeleton of human body Study of structure of a robot=physical structure of the manipulator structure
 UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Written exams of Robotics 1
 Written exams of Robotics 1 http://www.diag.uniroma1.it/~deluca/rob1_en.php All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 06.11 2 Planar
Written exams of Robotics 1 http://www.diag.uniroma1.it/~deluca/rob1_en.php All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 06.11 2 Planar
Basilio Bona ROBOTICA 03CFIOR 1
 Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Chapter 1: Introduction
 Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
[2] J. "Kinematics," in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.
![[2] J. Kinematics, in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.](/thumbs/90/102406247.jpg "[2] J. Kinematics, in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.") 92 Chapter 3 Manipulator kinematics The major expense in calculating kinematics is often the calculation of the transcendental functions (sine and cosine). When these functions are available as part of
92 Chapter 3 Manipulator kinematics The major expense in calculating kinematics is often the calculation of the transcendental functions (sine and cosine). When these functions are available as part of
Kinematic Model of Robot Manipulators
 Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Lecture 3. Planar Kinematics
 Matthew T. Mason Mechanics of Manipulation Outline Where are we? s 1. Foundations and general concepts. 2.. 3. Spherical and spatial kinematics. Readings etc. The text: By now you should have read Chapter
Matthew T. Mason Mechanics of Manipulation Outline Where are we? s 1. Foundations and general concepts. 2.. 3. Spherical and spatial kinematics. Readings etc. The text: By now you should have read Chapter
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS
 KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
MEAM 520. Denavit-Hartenberg (DH)
") MEAM 520 Denavit-Hartenberg (DH) Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 5: September
MEAM 520 Denavit-Hartenberg (DH) Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 5: September
ME/CS 133(a): Final Exam (Fall Quarter 2017/2018)
: Final Exam (Fall Quarter 2017/2018)") ME/CS 133(a): Final Exam (Fall Quarter 2017/2018) Instructions 1. Limit your total time to 5 hours. You can take a break in the middle of the exam if you need to ask a question, or go to dinner, etc. That
ME/CS 133(a): Final Exam (Fall Quarter 2017/2018) Instructions 1. Limit your total time to 5 hours. You can take a break in the middle of the exam if you need to ask a question, or go to dinner, etc. That
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS
 Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS Amit L Talli 1, B. B. Kotturshettar 2 Asst. Professor, Department of Automation & Robotics
Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS Amit L Talli 1, B. B. Kotturshettar 2 Asst. Professor, Department of Automation & Robotics
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
PPGEE Robot Dynamics I
 PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
 Industrial Sections: 1.Robot Anatomy and Related Attributes 2.Robot Control Systems 3.End Effectors 4.Sensors in 5.Industrial Robot Applications 6.Robot Programming 7.Robot Accuracy and Repeatability Industrial
Industrial Sections: 1.Robot Anatomy and Related Attributes 2.Robot Control Systems 3.End Effectors 4.Sensors in 5.Industrial Robot Applications 6.Robot Programming 7.Robot Accuracy and Repeatability Industrial
θ x Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul
 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul") θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
Chapter 4. Mechanism Design and Analysis
 Chapter 4. Mechanism Design and Analysis All mechanical devices containing moving parts are composed of some type of mechanism. A mechanism is a group of links interacting with each other through joints
Chapter 4. Mechanism Design and Analysis All mechanical devices containing moving parts are composed of some type of mechanism. A mechanism is a group of links interacting with each other through joints
Kinematics, Kinematics Chains CS 685
 Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Chapter 2 Kinematics of Mechanisms
 Chapter Kinematics of Mechanisms.1 Preamble Robot kinematics is the study of the motion (kinematics) of robotic mechanisms. In a kinematic analysis, the position, velocity, and acceleration of all the
Chapter Kinematics of Mechanisms.1 Preamble Robot kinematics is the study of the motion (kinematics) of robotic mechanisms. In a kinematic analysis, the position, velocity, and acceleration of all the
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer
 Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
Inverse Kinematics of 6 DOF Serial Manipulator. Robotics. Inverse Kinematics of 6 DOF Serial Manipulator
 Inverse Kinematics of 6 DOF Serial Manipulator Robotics Inverse Kinematics of 6 DOF Serial Manipulator Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics
Inverse Kinematics of 6 DOF Serial Manipulator Robotics Inverse Kinematics of 6 DOF Serial Manipulator Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics
MDP646: ROBOTICS ENGINEERING. Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt. Prof. Said M.
 MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
Lecture Note 6: Forward Kinematics
 ECE5463: Introduction to Robotics Lecture Note 6: Forward Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 6 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 6: Forward Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 6 (ECE5463
Structural Configurations of Manipulators
 Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Advanced Robotic - MAE 263D - Introduction
 Advanced Robotic - MAE 263D - Introduction Office: Engineering IV Rm. 37-146 Lab: Bionics Lab - Engineering IV, Rm. 18-111 E-mail: rosen@seas.ucla.edu Office Hrs: Wed 2:00-4:00 TA: Sepehr Ghassemi TA Room:
Advanced Robotic - MAE 263D - Introduction Office: Engineering IV Rm. 37-146 Lab: Bionics Lab - Engineering IV, Rm. 18-111 E-mail: rosen@seas.ucla.edu Office Hrs: Wed 2:00-4:00 TA: Sepehr Ghassemi TA Room:
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 1: Introduction
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
Theory of Robotics and Mechatronics
 Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Serial Manipulator Statics. Robotics. Serial Manipulator Statics. Vladimír Smutný
 Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Modelling of mechanical system CREATING OF KINEMATIC CHAINS
 Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
Human Motion. Session Speaker Dr. M. D. Deshpande. AML2506 Biomechanics and Flow Simulation PEMP-AML2506
 AML2506 Biomechanics and Flow Simulation Day 02A Kinematic Concepts for Analyzing Human Motion Session Speaker Dr. M. D. Deshpande 1 Session Objectives At the end of this session the delegate would have
AML2506 Biomechanics and Flow Simulation Day 02A Kinematic Concepts for Analyzing Human Motion Session Speaker Dr. M. D. Deshpande 1 Session Objectives At the end of this session the delegate would have
Module 1 : Introduction to robotics. Lecture 3 : Industrial Manipulators & AGVs. Objectives. History of robots : Main bodies and wrists
 Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Robotics (Kinematics) Winter 1393 Bonab University
 Winter 1393 Bonab University") Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
The Denavit Hartenberg Convention
 The Denavit Hartenberg Convention Ravi Balasubramanian ravib@cmu.edu Robotics Institute Carnegie Mellon University 1 Why do Denavit Hartenberg (DH)? Last class, Matt did forward kinematics for the simple
The Denavit Hartenberg Convention Ravi Balasubramanian ravib@cmu.edu Robotics Institute Carnegie Mellon University 1 Why do Denavit Hartenberg (DH)? Last class, Matt did forward kinematics for the simple
Kinematic Synthesis. October 6, 2015 Mark Plecnik
 Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Analytical and Applied Kinematics
 Analytical and Applied Kinematics Vito Moreno moreno@engr.uconn.edu 860-614-2365 (cell) http://www.engr.uconn.edu/~moreno Office EB1, hours Thursdays 10:00 to 5:00 1 This course introduces a unified and
Analytical and Applied Kinematics Vito Moreno moreno@engr.uconn.edu 860-614-2365 (cell) http://www.engr.uconn.edu/~moreno Office EB1, hours Thursdays 10:00 to 5:00 1 This course introduces a unified and
Reaching and Grasping
 Lecture 14: (06/03/14) Reaching and Grasping Reference Frames Configuration space Reaching Grasping Michael Herrmann michael.herrmann@ed.ac.uk, phone: 0131 6 517177, Informatics Forum 1.42 Robot arms Typically
Lecture 14: (06/03/14) Reaching and Grasping Reference Frames Configuration space Reaching Grasping Michael Herrmann michael.herrmann@ed.ac.uk, phone: 0131 6 517177, Informatics Forum 1.42 Robot arms Typically
Kinematics of Machines. Brown Hills College of Engineering & Technology
 Introduction: mechanism and machines, kinematic links, kinematic pairs, kinematic chains, plane and space mechanism, kinematic inversion, equivalent linkages, four link planar mechanisms, mobility and
Introduction: mechanism and machines, kinematic links, kinematic pairs, kinematic chains, plane and space mechanism, kinematic inversion, equivalent linkages, four link planar mechanisms, mobility and
What is a Manipulator? 2007 RoboJackets TE Sessions 10/16/2007. Keys to Understanding Manipulators TE Sessions Manipulators 10/16/07
 2007 TE Sessions Manipulators 10/16/07 www.robojackets.org Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages
2007 TE Sessions Manipulators 10/16/07 www.robojackets.org Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages
METR 4202: Advanced Control & Robotics
 Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
ISE 422/ME 478/ISE 522 Robotic Systems
 ISE 422/ME 478/ISE 522 Robotic Systems Overview of Course R. Van Til Industrial & Systems Engineering Dept. Oakland University 1 What kind of robots will be studied? This kind Not this kind 2 Robots Used
ISE 422/ME 478/ISE 522 Robotic Systems Overview of Course R. Van Til Industrial & Systems Engineering Dept. Oakland University 1 What kind of robots will be studied? This kind Not this kind 2 Robots Used
Kinematics - Introduction. Robotics. Kinematics - Introduction. Vladimír Smutný
 Kinematics - Introduction Robotics Kinematics - Introduction Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Kinematics - Introduction Robotics Kinematics - Introduction Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Lecture Note 2: Configuration Space
 ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
Singularities of a Manipulator with Offset Wrist
 Singularities of a Manipulator with Offset Wrist Robert L. Williams II Department of Mechanical Engineering Ohio University Athens, Ohio Journal of Mechanical Design Vol. 11, No., pp. 315-319 June, 1999
Singularities of a Manipulator with Offset Wrist Robert L. Williams II Department of Mechanical Engineering Ohio University Athens, Ohio Journal of Mechanical Design Vol. 11, No., pp. 315-319 June, 1999
Kinematics Fundamentals CREATING OF KINEMATIC CHAINS
 Kinematics Fundamentals CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies the
Kinematics Fundamentals CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies the
Kinematic Analysis of MTAB Robots and its integration with RoboAnalyzer Software
 Kinematic Analysis of MTAB Robots and its integration with RoboAnalyzer Software Ratan Sadanand O. M. Department of Mechanical Engineering Indian Institute of Technology Delhi New Delhi, India ratan.sadan@gmail.com
Kinematic Analysis of MTAB Robots and its integration with RoboAnalyzer Software Ratan Sadanand O. M. Department of Mechanical Engineering Indian Institute of Technology Delhi New Delhi, India ratan.sadan@gmail.com
Rigging / Skinning. based on Taku Komura, Jehee Lee and Charles B.Own's slides
 Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture 03 Introduction to Robot and Robotics (Contd.) (Refer Slide Time: 00:34) Now,
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture 03 Introduction to Robot and Robotics (Contd.) (Refer Slide Time: 00:34) Now,
Inverse Kinematics Software Design and Trajectory Control Programming of SCARA Manipulator robot
 International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS
 DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS ALBA PEREZ Robotics and Automation Laboratory University of California, Irvine Irvine, CA 9697 email: maperez@uci.edu AND J. MICHAEL MCCARTHY Department of Mechanical
DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS ALBA PEREZ Robotics and Automation Laboratory University of California, Irvine Irvine, CA 9697 email: maperez@uci.edu AND J. MICHAEL MCCARTHY Department of Mechanical
SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK
 ABCM Symposium Series in Mechatronics - Vol. 3 - pp.276-285 Copyright c 2008 by ABCM SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK Luiz Ribeiro, ribeiro@ime.eb.br Raul Guenther,
ABCM Symposium Series in Mechatronics - Vol. 3 - pp.276-285 Copyright c 2008 by ABCM SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK Luiz Ribeiro, ribeiro@ime.eb.br Raul Guenther,
Inverse Kinematics Solution for Trajectory Tracking using Artificial Neural Networks for SCORBOT ER-4u
 Inverse Kinematics Solution for Trajectory Tracking using Artificial Neural Networks for SCORBOT ER-4u Rahul R Kumar 1, Praneel Chand 2 School of Engineering and Physics The University of the South Pacific
Inverse Kinematics Solution for Trajectory Tracking using Artificial Neural Networks for SCORBOT ER-4u Rahul R Kumar 1, Praneel Chand 2 School of Engineering and Physics The University of the South Pacific
Spatial R-C-C-R Mechanism for a Single DOF Gripper
 NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
Using Algebraic Geometry to Study the Motions of a Robotic Arm
 Using Algebraic Geometry to Study the Motions of a Robotic Arm Addison T. Grant January 28, 206 Abstract In this study we summarize selected sections of David Cox, John Little, and Donal O Shea s Ideals,
Using Algebraic Geometry to Study the Motions of a Robotic Arm Addison T. Grant January 28, 206 Abstract In this study we summarize selected sections of David Cox, John Little, and Donal O Shea s Ideals,
DOUBLE CIRCULAR-TRIANGULAR SIX-DEGREES-OF- FREEDOM PARALLEL ROBOT
 DOUBLE CIRCULAR-TRIANGULAR SIX-DEGREES-OF- FREEDOM PARALLEL ROBOT V. BRODSKY, D. GLOZMAN AND M. SHOHAM Department of Mechanical Engineering Technion-Israel Institute of Technology Haifa, 32000 Israel E-mail:
DOUBLE CIRCULAR-TRIANGULAR SIX-DEGREES-OF- FREEDOM PARALLEL ROBOT V. BRODSKY, D. GLOZMAN AND M. SHOHAM Department of Mechanical Engineering Technion-Israel Institute of Technology Haifa, 32000 Israel E-mail:
A FRAMEWORK OF DESIGN TOOLS INTEGRATION FOR ROBOTIC MECHANISMS. A Thesis. Presented to. The Graduate Faculty of the University of Akron
 A FRAMEWORK OF DESIGN TOOLS INTEGRATION FOR ROBOTIC MECHANISMS A Thesis Presented to The Graduate Faculty of the University of Akron In Partial Fulfillment of the Requirements for the Degree Master of
A FRAMEWORK OF DESIGN TOOLS INTEGRATION FOR ROBOTIC MECHANISMS A Thesis Presented to The Graduate Faculty of the University of Akron In Partial Fulfillment of the Requirements for the Degree Master of
7-Degree-Of-Freedom (DOF) Cable-Driven Humanoid Robot Arm. A thesis presented to. the faculty of. In partial fulfillment
 Cable-Driven Humanoid Robot Arm. A thesis presented to. the faculty of. In partial fulfillment") Mechanism Design, Kinematics and Dynamics Analysis of a 7-Degree-Of-Freedom (DOF) Cable-Driven Humanoid Robot Arm A thesis presented to the faculty of the Russ College of Engineering and Technology of
Mechanism Design, Kinematics and Dynamics Analysis of a 7-Degree-Of-Freedom (DOF) Cable-Driven Humanoid Robot Arm A thesis presented to the faculty of the Russ College of Engineering and Technology of
Force control of redundant industrial robots with an approach for singularity avoidance using extended task space formulation (ETSF)
") Force control of redundant industrial robots with an approach for singularity avoidance using extended task space formulation (ETSF) MSc Audun Rønning Sanderud*, MSc Fredrik Reme**, Prof. Trygve Thomessen***
Force control of redundant industrial robots with an approach for singularity avoidance using extended task space formulation (ETSF) MSc Audun Rønning Sanderud*, MSc Fredrik Reme**, Prof. Trygve Thomessen***
Modeling and Control of Manipulators
 Modeling and Control of Manipulators Part I: Geometric and Kinematic Models Wisama KHALIL Ecole Centrale de Nantes Master I EMARO European Master on Advanced Robotics Master I ARIA Master Automatique,
Modeling and Control of Manipulators Part I: Geometric and Kinematic Models Wisama KHALIL Ecole Centrale de Nantes Master I EMARO European Master on Advanced Robotics Master I ARIA Master Automatique,
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Articulated Characters
 Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
SAMPLE STUDY MATERIAL. Mechanical Engineering. Postal Correspondence Course. Theory of Machines. GATE, IES & PSUs
 TOM - ME GATE, IES, PSU 1 SAMPLE STUDY MATERIAL Mechanical Engineering ME Postal Correspondence Course Theory of Machines GATE, IES & PSUs TOM - ME GATE, IES, PSU 2 C O N T E N T TOPIC 1. MACHANISMS AND
TOM - ME GATE, IES, PSU 1 SAMPLE STUDY MATERIAL Mechanical Engineering ME Postal Correspondence Course Theory of Machines GATE, IES & PSUs TOM - ME GATE, IES, PSU 2 C O N T E N T TOPIC 1. MACHANISMS AND
Lecture 18 Kinematic Chains
 CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble
 Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble Masoud Moeini, University of Hamburg, Oct 216 [Wearable Haptic Thimble,A Developing Guide and Tutorial,Francesco Chinello]
Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble Masoud Moeini, University of Hamburg, Oct 216 [Wearable Haptic Thimble,A Developing Guide and Tutorial,Francesco Chinello]
ADJUSTABLE GEOMETRIC CONSTRAINTS 2001 MIT PSDAM AND PERG LABS
 ADJUSTABLE GEOMETRIC CONSTRAINTS Why adjust kinematic couplings? KC Repeatability is orders of magnitude better than accuracy Accuracy = f ( manufacture and assemble ) Kinematic Coupling Accuracy Adjusted
ADJUSTABLE GEOMETRIC CONSTRAINTS Why adjust kinematic couplings? KC Repeatability is orders of magnitude better than accuracy Accuracy = f ( manufacture and assemble ) Kinematic Coupling Accuracy Adjusted
Kinematics: Intro. Kinematics is study of motion
 Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Mechanism Kinematics and Dynamics
 Mechanism Kinematics and Dynamics Final Project 1. The window shield wiper For the window wiper, (1). Select the length of all links such that the wiper tip X p (t) can cover a 120 cm window width. (2).
Mechanism Kinematics and Dynamics Final Project 1. The window shield wiper For the window wiper, (1). Select the length of all links such that the wiper tip X p (t) can cover a 120 cm window width. (2).
KINEMATIC MODELLING AND ANALYSIS OF 5 DOF ROBOTIC ARM
 International Journal of Robotics Research and Development (IJRRD) ISSN(P): 2250-1592; ISSN(E): 2278 9421 Vol. 4, Issue 2, Apr 2014, 17-24 TJPRC Pvt. Ltd. KINEMATIC MODELLING AND ANALYSIS OF 5 DOF ROBOTIC
International Journal of Robotics Research and Development (IJRRD) ISSN(P): 2250-1592; ISSN(E): 2278 9421 Vol. 4, Issue 2, Apr 2014, 17-24 TJPRC Pvt. Ltd. KINEMATIC MODELLING AND ANALYSIS OF 5 DOF ROBOTIC
Kinematics of pantograph masts
 Kinematics of pantograph masts B. P. Nagaraj, R. Pandiyan ISRO Satellite Centre, Bangalore, 560 017, India and Ashitava Ghosal Dept. of Mechanical Engineering, Indian Institute of Science, Bangalore 560
Kinematics of pantograph masts B. P. Nagaraj, R. Pandiyan ISRO Satellite Centre, Bangalore, 560 017, India and Ashitava Ghosal Dept. of Mechanical Engineering, Indian Institute of Science, Bangalore 560