Advanced Digital Sensors/Photography Geometry Capture Lecture #10 September 21, 2017 Donald P. Greenberg
|
|
|
- Elijah Samuel Alexander
- 6 years ago
- Views:
Transcription
1 Visual Imaging in the Electronic Age Advanced Digital Sensors/Photography Geometry Capture Lecture #10 September 21, 2017 Donald P. Greenberg
2 Digital Geometry Capture Photographic methods Laser scanning Time of Flight Sensors

3 Camera Definition Camera View direction Model The camera location, view direction, and frustum must be defined relative to the object.
4 Donald P. Greenberg - Cornell Program of Computer Graphics Mapping a Viewing Frustum to a Standard Viewbox Z e Y e Y s Z s X s X e z e = D Frustum of vision z e = F Screen coordinate system
5 In general, what are the unknown variables? Unknown observer position- Xe, Ye, Ze Unknown viewer direction- Φ, θ, Ψ Unknown focal length- f

6 Early Work
7 Computer Vision The science and technology of machines that see Can the machine extract desired information from an image? What did I see?
8 Simple case Known camera positions (x e, y e, z e ), camera optics, Identify corresponding points in each image. Jeremiah Fairbank. View dependent perspective images. Master's thesis, Cornell University, August 2005.

9 Sagan House

10 Sagan House

11 ReMake Autodesk

12 ReMake Autodesk
13 Reconstructing Rome 1 The advent of digital photography and the recent growth of photo-sharing websites ( ) have brought about the seismic change in photography and the use of photo collections. 1 A search for the word Rome on returns two million photos. This collection, or others like it, capture every popular site, facade, statue, fountain, interior, café, etc.
14 Characteristics of Typical Photo Sets The photos are unstructured No particular order or distribution of camera viewpoints The photos are uncalibrated Nothing is known about the camera settings (exposure, focal length, etc.) The scale is enormous (millions, not thousands of photos) and We need to do this fast!

15 Correspondence and 3D Structure from Different Camera Positions Note: The pictures are in correspondence 2D dots with same color correspond to the same 3D points.
16 3D Structure from Different Camera Positions Camera 1 Camera 2 Camera 3

17 3D Structure from Different Camera Positions Camera 3 Camera 1 Camera 2 Assuming the position of the red dot is known, there is reprojection error in Camera 3.
18 Change the Problem to an optimization problem Minimize the sum of the squares of the reprojection errors. This non-linear least squares problem is difficult to solve due to local minima and maxima. Authors selectively started with a few choice cameras and points and grew scenes incrementally (a process known as bundle adjustment).

19 Trevi Fountain, Rome Italy

20 Feature Detection and Matching A track corresponding to a point on the face of the central statue of Oceanus at the Trevi Fountain, the embodiment of a river encircling the world in Greek mythology. Sameer Agarwal, Yasutaka Furukawa, Naoh Snavely, Brian Curless, Steve M. Seitz, Richard Szeliski. Reconstructing Rome, IEEE Computer, June 2010.

21 Colosseum The Colosseum (Rome) Reconstructed dense 3D point models. For places with many available images, reconstruction quality is very high. Sameer Agarwal, Yasutaka Furukawa, Naoh Snavely, Brian Curless, Steve M. Seitz, Richard Szeliski. Reconstructing Rome, IEEE Computer, June 2010.

22 Cornell Campus, McGraw Hall - Noah Snavely
23 Digital Geometry Capture Photographic methods Laser scanning Time of Flight Sensors


24 Cyberware Scanner

25 Cyberware Scanner Diagram

26 Cyberware Scanner

27 Uncle Don

28 Cyberware vs Catch
29 Digital Geometry Capture Photographic methods Laser scanning Time of Flight Sensors
30 Pulsed Modulation

31 Kinect for xbox 360

32 Matterport 2016
33 Google Street View The world contains roughly 50 million miles of roads, paved and unpaved, across 219 countries (ref.) This is equivalent to circumnavigating the globe 1250 times. To date, hundreds of cities in many countries across four continents have been captured. Google has developed several vehicular platforms and texture information in the project s seven year history. Drafomir Anguelov, Carole Dulong, Daniel Filip, Christian Frueh, Stepheane Lafon, Richard Lyon, Abhijit Ogale, Luc Vincent, Josh Weaver. Google Street View: Capturing The World At Street Level, IEEE Computer, June 2010.
34 Google Street View and Google Maps In 2007, Larry Page requests Thrun and Levandowski to create a virtual map of the U.S. Engineers jury-rigged some vans with GPS and rooftop cameras which shot 360 panoramas for any address. They equipped 100 cars which were sent around the U.S. Data was put together with a program written by Marc Levoy. In 2011, Google announced it would start charging (large) commercial sites In 2012, Google allows users to post photos and reviews of locations By October 2012, Google will have updated 250,000 miles of U.S. roads Note: They have also added Google Moon and Google Mars

35 R7 Street View Camera System The system is a rosette of 15 small, outward-looking cameras using 5-megapixel CMOS image sensors and custom, low-flare, controlled-distortion lenses. Drafomir Anguelov, Carole Dulong, Daniel Filip, Christian Frueh, Stepheane Lafon, Richard Lyon, Abhijit Ogale, Luc Vincent, Josh Weaver. Google Street View: Capturing The World At Street Level, IEEE Computer, June 2010.

36 Google Street View Car Fleet October 15, 2012
37 Will We Have Autonomous Driving Vehicles? Every decade another bit of automation is introduced: 1950s Power steering 1970s Cruise control 1980s Anti-lock brakes 1990s Electronic stability control 2000s The first self-parking cars Now Detection of lane lines Distance from car ahead Night vision Blind spot detection Stereo cameras to identify pedestrians
38 Autonomous Driving Vehicles Pre-2000 There was no way, before 2000, to make something interesting The sensors weren t there The computers weren t there The mapping wasn t there Radar was a device on a hilltop that cost $200M Sebastian Thrun Founder of the Google Car Project
39 Digital Geometry Capture Photographic methods Laser scanning Sonar Time of Flight All of the Above
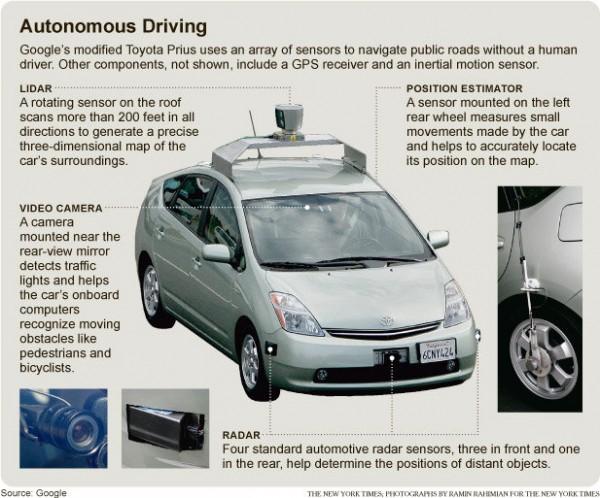
40 Google s Autonomous Driving Vehicle
41 Google s Autonomous Driving Vehicle 2013 Uses multiple sensors, each with a different view of the world Laser revolutions/second scanning 1.3 million points in concentric waves starting 8 feet from the car It can spot a 14 object at a distance of 160 feet Radar Has twice the range of the Laser, but much less precision Photography Excellent at identifying road signs, turn signals, colors and lights
42 Google s Autonomous Driving Vehicle New laser sensors 2 X range 30 X 300 can spot a metal plate <2 thick Size of a coffee mug Cost $10,000 (less than current $80,000)

43 Data from Sensors on Google s ADV
44 Google Street View The world contains roughly 50 million miles of roads, paved and unpaved, across 219 countries (ref.) This is equivalent to circumnavigating the globe 1250 times. To date, hundreds of cities in many countries across four continents have been captured. Google has developed several vehicular platforms and texture information in the project s seven year history. Drafomir Anguelov, Carole Dulong, Daniel Filip, Christian Frueh, Stepheane Lafon, Richard Lyon, Abhijit Ogale, Luc Vincent, Josh Weaver. Google Street View: Capturing The World At Street Level, IEEE Computer, June 2010.
45 Google Street View Google announced it would start charging (large) commercial sites 2012 Google allows users to post photos and reviews of locations By October 2012, Google will have updated 250,000 miles of U.S. roads Note: They have also added Google Moon and Google Mars

46 Lombard Street, San Francisco

47 Google Camel View

48 Google Street View Acquisition Map 2012

49 Google Street View Acquisition Map 2016


50 Using Street View data to enhance user walk-through experiences in Google Earth. Original 3D models of a New York City scene from airborne data only. Fused 3D model with high-resolution facades. The visual quality is considerably higher, and many storefronts and signs can now be easily identified and recognized. Drafomir Anguelov, Carole Dulong, Daniel Filip, Christian Frueh, Stepheane Lafon, Richard Lyon, Abhijit Ogale, Luc Vincent, Josh Weaver. Google Street View: Capturing The World At Street Level, IEEE Computer, June 2010.

51 Imagery from new Street View Vehicle is accompanied by laser range data - which is aggregated and simplified by robustly fitting it in a coarse mesh that models the dominant scene surfaces. Drafomir Anguelov, Carole Dulong, Daniel Filip, Christian Frueh, Stepheane Lafon, Richard Lyon, Abhijit Ogale, Luc Vincent, Josh Weaver. Google Street View: Capturing The World At Street Level, IEEE Computer, June 2010.

52 Uber 2016

53

54
55 Velodyne s Lidar Sensors (VLP-16) 2016 $8,000 (single mode) Range: 100 meters Depth Accuracy ±3cm Field of View Horizontal 360 Vertical ±15 Data Rate Rotates 20x/sec. (64 laser/detector pairs) Angular Resolution Horizontal Vertical 2 Data Rate.3M (single mode) 1.3M (quad mode) points/second

56 Time of Flight Point Cloud

57 Meshes from Point Clouds
58 Autodesk ReCap 360

59 The Game of Drones Science Magazine, 30.Jan.2015 The End of Privacy
60 End
Advanced Digital Photography Geometry and Motion Capture Lecture #11 September 29, 2015 Donald P. Greenberg
 Visual Imaging in the Electronic Age Advanced Digital Photography Geometry and Motion Capture Lecture #11 September 29, 2015 Donald P. Greenberg Google Street View Car Fleet October 15, 2012 Google s Autonomous
Visual Imaging in the Electronic Age Advanced Digital Photography Geometry and Motion Capture Lecture #11 September 29, 2015 Donald P. Greenberg Google Street View Car Fleet October 15, 2012 Google s Autonomous
Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Visual Imaging in the Electronic Age Assignment #3 Draft Geometry Capture
 Visual Imaging in the Electronic Age Assignment #3 Draft Geometry Capture Assigned: October 5, 2017 Due Date: TBA (October 2017) The above image is of the sculpture by James Mahoney, which was demonstrated
Visual Imaging in the Electronic Age Assignment #3 Draft Geometry Capture Assigned: October 5, 2017 Due Date: TBA (October 2017) The above image is of the sculpture by James Mahoney, which was demonstrated
Amateur photography was once largely a personal RECONSTRUCTING ROME
 COVER FE ATURE RECONSTRUCTING ROME Sameer Agarwal and Yasutaka Furukawa, Google Noah Snavely, Cornell University Brian Curless, University of Washington Steven M. Seitz, Google and University of Washington
COVER FE ATURE RECONSTRUCTING ROME Sameer Agarwal and Yasutaka Furukawa, Google Noah Snavely, Cornell University Brian Curless, University of Washington Steven M. Seitz, Google and University of Washington
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects
 Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley Systems White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud Keriven
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley Systems White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud Keriven
Introduction to Computer Vision. Srikumar Ramalingam School of Computing University of Utah
 Introduction to Computer Vision Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Course Website http://www.eng.utah.edu/~cs6320/ What is computer vision? Light source 3D
Introduction to Computer Vision Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Course Website http://www.eng.utah.edu/~cs6320/ What is computer vision? Light source 3D
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects
 www.bentley.com Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud
www.bentley.com Comparing Aerial Photogrammetry and 3D Laser Scanning Methods for Creating 3D Models of Complex Objects A Bentley White Paper Cyril Novel Senior Software Engineer, Bentley Systems Renaud
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Solid-State Hybrid LiDAR for Autonomous Driving Product Description
 Solid-State Hybrid LiDAR for Autonomous Driving Product Description What is LiDAR Sensor Who is Using LiDARs How does LiDAR Work Hesai LiDAR Demo Features Terminologies Specifications What is LiDAR A LiDAR
Solid-State Hybrid LiDAR for Autonomous Driving Product Description What is LiDAR Sensor Who is Using LiDARs How does LiDAR Work Hesai LiDAR Demo Features Terminologies Specifications What is LiDAR A LiDAR
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
The raycloud A Vision Beyond the Point Cloud
 The raycloud A Vision Beyond the Point Cloud Christoph STRECHA, Switzerland Key words: Photogrammetry, Aerial triangulation, Multi-view stereo, 3D vectorisation, Bundle Block Adjustment SUMMARY Measuring
The raycloud A Vision Beyond the Point Cloud Christoph STRECHA, Switzerland Key words: Photogrammetry, Aerial triangulation, Multi-view stereo, 3D vectorisation, Bundle Block Adjustment SUMMARY Measuring
AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS
 AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS Ioannis Stamos Department of Computer Science Hunter College, City University of New York 695 Park Avenue, New York NY 10065 istamos@hunter.cuny.edu http://www.cs.hunter.cuny.edu/
AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS Ioannis Stamos Department of Computer Science Hunter College, City University of New York 695 Park Avenue, New York NY 10065 istamos@hunter.cuny.edu http://www.cs.hunter.cuny.edu/
CSc Topics in Computer Graphics 3D Photography
 CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Optical Sensors: Key Technology for the Autonomous Car
 Optical Sensors: Key Technology for the Autonomous Car Rajeev Thakur, P.E., Product Marketing Manager, Infrared Business Unit, Osram Opto Semiconductors Autonomously driven cars will combine a variety
Optical Sensors: Key Technology for the Autonomous Car Rajeev Thakur, P.E., Product Marketing Manager, Infrared Business Unit, Osram Opto Semiconductors Autonomously driven cars will combine a variety
High Definition Modeling of Calw, Badstrasse and its Google Earth Integration
 Master Thesis Yuanting LI High Definition Modeling of Calw, Badstrasse and its Google Earth Integration Duration of the Thesis: 6 months Completion: July, 2014 Supervisors: Prof.Dr.-Ing.Dieter Fritsch
Master Thesis Yuanting LI High Definition Modeling of Calw, Badstrasse and its Google Earth Integration Duration of the Thesis: 6 months Completion: July, 2014 Supervisors: Prof.Dr.-Ing.Dieter Fritsch
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Introduction to 3D Machine Vision
 Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
EVOLUTION OF POINT CLOUD
 Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
LASER SCANNING AND PHOTOGRAMMETRY: A HYBRID APPROACH FOR HERITAGE DOCUMENTATION
 LASER SCANNING AND PHOTOGRAMMETRY: A HYBRID APPROACH FOR HERITAGE DOCUMENTATION Yahya Alshawabkeh, Norbert Haala Institute for Photogrammetry (ifp), University of Stuttgart, Germany Geschwister-Scholl-Strasse
LASER SCANNING AND PHOTOGRAMMETRY: A HYBRID APPROACH FOR HERITAGE DOCUMENTATION Yahya Alshawabkeh, Norbert Haala Institute for Photogrammetry (ifp), University of Stuttgart, Germany Geschwister-Scholl-Strasse
DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS
 DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS Tsunetake Kanatani,, Hideyuki Kume, Takafumi Taketomi, Tomokazu Sato and Naokazu Yokoya Hyogo Prefectural
DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS Tsunetake Kanatani,, Hideyuki Kume, Takafumi Taketomi, Tomokazu Sato and Naokazu Yokoya Hyogo Prefectural
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots
 3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Photo Tourism: Exploring Photo Collections in 3D
 Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29,
 Variations on the Hermann grid: an extinction illusion. Perception, 29,") Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Trimble Engineering & Construction Group, 5475 Kellenburger Road, Dayton, OH , USA
 Trimble VISION Ken Joyce Martin Koehler Michael Vogel Trimble Engineering and Construction Group Westminster, Colorado, USA April 2012 Trimble Engineering & Construction Group, 5475 Kellenburger Road,
Trimble VISION Ken Joyce Martin Koehler Michael Vogel Trimble Engineering and Construction Group Westminster, Colorado, USA April 2012 Trimble Engineering & Construction Group, 5475 Kellenburger Road,
Mobile Mapping and Navigation. Brad Kohlmeyer NAVTEQ Research
 Mobile Mapping and Navigation Brad Kohlmeyer NAVTEQ Research Mobile Mapping & Navigation Markets Automotive Enterprise Internet & Wireless Mobile Devices 2 Local Knowledge & Presence Used to Create Most
Mobile Mapping and Navigation Brad Kohlmeyer NAVTEQ Research Mobile Mapping & Navigation Markets Automotive Enterprise Internet & Wireless Mobile Devices 2 Local Knowledge & Presence Used to Create Most
The Light Field and Image-Based Rendering
 Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Noah Snavely Steven M. Seitz. Richard Szeliski. University of Washington. Microsoft Research. Modified from authors slides
 Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Modified from authors slides
Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Modified from authors slides
Image-Based Modeling and Rendering
 Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware
 Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Collaborative Mapping with Streetlevel Images in the Wild. Yubin Kuang Co-founder and Computer Vision Lead
 Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
Collaborative Mapping with Streetlevel Images in the Wild Yubin Kuang Co-founder and Computer Vision Lead Mapillary Mapillary is a street-level imagery platform, powered by collaboration and computer vision.
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES
 COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
COMPARISON OF LASER SCANNING, PHOTOGRAMMETRY AND SfM-MVS PIPELINE APPLIED IN STRUCTURES AND ARTIFICIAL SURFACES 2012 ISPRS Melbourne, Com III/4, S.Kiparissi Cyprus University of Technology 1 / 28 Structure
A Whole New World of Mapping and Sensing: Uses from Asset to Management to In Vehicle Sensing for Collision Avoidance
 A Whole New World of Mapping and Sensing: Uses from Asset to Management to In Vehicle Sensing for Collision Avoidance Charles Toth, Dorota A Grejner-Brzezinska, Carla Bailo and Joanna Pinkerton Satellite
A Whole New World of Mapping and Sensing: Uses from Asset to Management to In Vehicle Sensing for Collision Avoidance Charles Toth, Dorota A Grejner-Brzezinska, Carla Bailo and Joanna Pinkerton Satellite
Pattern Recognition for Autonomous. Pattern Recognition for Autonomous. Driving. Freie Universität t Berlin. Raul Rojas
 Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
Image-Based Rendering
 Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
AUTOMOTIVE ENVIRONMENT SENSORS
 AUTOMOTIVE ENVIRONMENT SENSORS Lecture 3. LIDARs Dr. Szilárd Aradi BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG LIDAR intro Light Detection and Ranging
AUTOMOTIVE ENVIRONMENT SENSORS Lecture 3. LIDARs Dr. Szilárd Aradi BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG LIDAR intro Light Detection and Ranging
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Photo Tourism: Exploring Photo Collections in 3D
 Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 15,464 37,383 76,389 2006 Noah Snavely 15,464 37,383 76,389 Reproduced
Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 15,464 37,383 76,389 2006 Noah Snavely 15,464 37,383 76,389 Reproduced
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Large Scale 3D Reconstruction (50 mins) Yasutaka Washington University in St. Louis
 Yasutaka Washington University in St. Louis") Large Scale 3D Reconstruction (50 mins) Yasutaka Furukawa @ Washington University in St. Louis Outline 1. Large scale MVS for organized photos (Aerial photos) 2. Large scale MVS for unorganized photos
Large Scale 3D Reconstruction (50 mins) Yasutaka Furukawa @ Washington University in St. Louis Outline 1. Large scale MVS for organized photos (Aerial photos) 2. Large scale MVS for unorganized photos
Image-Based Modeling and Rendering
 Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Overview of Active Vision Techniques
 SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, September 23 rd, 2016 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO GSA, October 20 th, 2017 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Course Outline (1) #6 Data Acquisition for Built Environment. Fumio YAMAZAKI
 #6 Data Acquisition for Built Environment. Fumio YAMAZAKI") AT09.98 Applied GIS and Remote Sensing for Disaster Mitigation #6 Data Acquisition for Built Environment 9 October, 2002 Fumio YAMAZAKI yamazaki@ait.ac.th http://www.star.ait.ac.th/~yamazaki/ Course Outline
AT09.98 Applied GIS and Remote Sensing for Disaster Mitigation #6 Data Acquisition for Built Environment 9 October, 2002 Fumio YAMAZAKI yamazaki@ait.ac.th http://www.star.ait.ac.th/~yamazaki/ Course Outline
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
Photogrammetry: DTM Extraction & Editing
 Photogrammetry: DTM Extraction & Editing Review of terms Vertical aerial photograph Perspective center Exposure station Fiducial marks Principle point Air base (Exposure Station) Digital Photogrammetry:
Photogrammetry: DTM Extraction & Editing Review of terms Vertical aerial photograph Perspective center Exposure station Fiducial marks Principle point Air base (Exposure Station) Digital Photogrammetry:
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
12/3/2009. What is Computer Vision? Applications. Application: Assisted driving Pedestrian and car detection. Application: Improving online search
 Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Acoustic/Lidar Sensor Fusion for Car Tracking in City Traffic Scenarios
 Sensor Fusion for Car Tracking Acoustic/Lidar Sensor Fusion for Car Tracking in City Traffic Scenarios, Daniel Goehring 1 Motivation Direction to Object-Detection: What is possible with costefficient microphone
Sensor Fusion for Car Tracking Acoustic/Lidar Sensor Fusion for Car Tracking in City Traffic Scenarios, Daniel Goehring 1 Motivation Direction to Object-Detection: What is possible with costefficient microphone
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry
 CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Advanced Driver Assistance: Modular Image Sensor Concept
 Vision Advanced Driver Assistance: Modular Image Sensor Concept Supplying value. Integrated Passive and Active Safety Systems Active Safety Passive Safety Scope Reduction of accident probability Get ready
Vision Advanced Driver Assistance: Modular Image Sensor Concept Supplying value. Integrated Passive and Active Safety Systems Active Safety Passive Safety Scope Reduction of accident probability Get ready
Leica Systems Overview
 RC30 AERIAL CAMERA SYSTEM Leica Systems Overview The Leica RC30 aerial film camera is the culmination of decades of development, started with Wild's first aerial camera in the 1920s. Beautifully engineered
RC30 AERIAL CAMERA SYSTEM Leica Systems Overview The Leica RC30 aerial film camera is the culmination of decades of development, started with Wild's first aerial camera in the 1920s. Beautifully engineered
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
3D BUILDINGS MODELLING BASED ON A COMBINATION OF TECHNIQUES AND METHODOLOGIES
 3D BUILDINGS MODELLING BASED ON A COMBINATION OF TECHNIQUES AND METHODOLOGIES Georgeta Pop (Manea), Alexander Bucksch, Ben Gorte Delft Technical University, Department of Earth Observation and Space Systems,
3D BUILDINGS MODELLING BASED ON A COMBINATION OF TECHNIQUES AND METHODOLOGIES Georgeta Pop (Manea), Alexander Bucksch, Ben Gorte Delft Technical University, Department of Earth Observation and Space Systems,
Photo Tourism: Exploring Photo Collections in 3D
 Click! Click! Oooo!! Click! Zoom click! Click! Some other camera noise!! Photo Tourism: Exploring Photo Collections in 3D Click! Click! Ahhh! Click! Click! Overview of Research at Microsoft, 2007 Jeremy
Click! Click! Oooo!! Click! Zoom click! Click! Some other camera noise!! Photo Tourism: Exploring Photo Collections in 3D Click! Click! Ahhh! Click! Click! Overview of Research at Microsoft, 2007 Jeremy
An Introduction to Lidar & Forestry May 2013
 An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
Applications of Mobile LiDAR and UAV Sourced Photogrammetry
 Applications of Mobile LiDAR and UAV Sourced Photogrammetry Thomas J. Pingel and Earle W. Isibue Northern Illinois University 2017 Illinois GIS Association (ILGISA) Annual Meeting October 2-4, 2017 tpingel.org
Applications of Mobile LiDAR and UAV Sourced Photogrammetry Thomas J. Pingel and Earle W. Isibue Northern Illinois University 2017 Illinois GIS Association (ILGISA) Annual Meeting October 2-4, 2017 tpingel.org
Solid State LiDAR for Ubiquitous 3D Sensing
 April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
April 6, 2016 Solid State LiDAR for Ubiquitous 3D Sensing Louay Eldada, Ph.D. CEO, Co-founder Quanergy Systems New Paradigm in 3D Sensing Disruptive Technologies: Solid State 3D LiDAR sensors Embedded
Camera Drones Lecture 3 3D data generation
 Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Option Driver Assistance. Product Information
 Product Information Table of Contents 1 Overview... 3 1.1 Introduction... 3 1.2 Features and Advantages... 3 1.3 Application Areas... 4 1.4 Further Information... 5 2 Functions... 5 3 Creating the Configuration
Product Information Table of Contents 1 Overview... 3 1.1 Introduction... 3 1.2 Features and Advantages... 3 1.3 Application Areas... 4 1.4 Further Information... 5 2 Functions... 5 3 Creating the Configuration
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday