Introduction to Computer Vision. Week 3, Fall 2010 Instructor: Prof. Ko Nishino
|
|
|
- Christian Carr
- 6 years ago
- Views:
Transcription
1 Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino
2 Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective Geometry/Camera Calibration " Projection models: perspective, orthographic, weakperspective, and affine " Homogeneous coordinates (to and from) " Camera parameters: intrinsic and extrinsic " Camera calibration " Direct Linear Calibration: Total Least Square " Non-linear calibration

3 Measurements on Planes Approach: unwarp then measure What kind of warp is this? 2 3 4
4 Image Rectification p p To unwarp (rectify) an image solve for homography H given p and p solve equations of the form: wp = Hp linear in unknowns: w and coefficients of H H is defined up to an arbitrary scale factor how many points are necessary to solve for H?
5 Solving for Homographies
6 Solving for Homographies! Total least squares A h 0 " Since h is only defined up to scale, solve for unit vector! " Minimize 2n " 9 9 2n " Solution:! = eigenvector of A T A with smallest eigenvalue " Works with 4 or more points (more points more accurate)
7 Homography! Homography is a singular case of the Fundamental Matrix " Two views of coplanar points " Two views that share the same center of projection
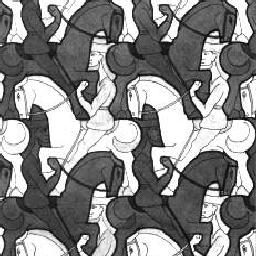
8 Project #1: Homography! Rectification " Take two images of an object with a planar surface " Make a fronto-parallel image of one of the planar surfaces " Submit results for three images including the test! Compositing " Take two images " Composite the entire or part of one image into another using the homography of corresponding regions " Submit results for three images including the test! Planar Mosaic (Extra Credit)

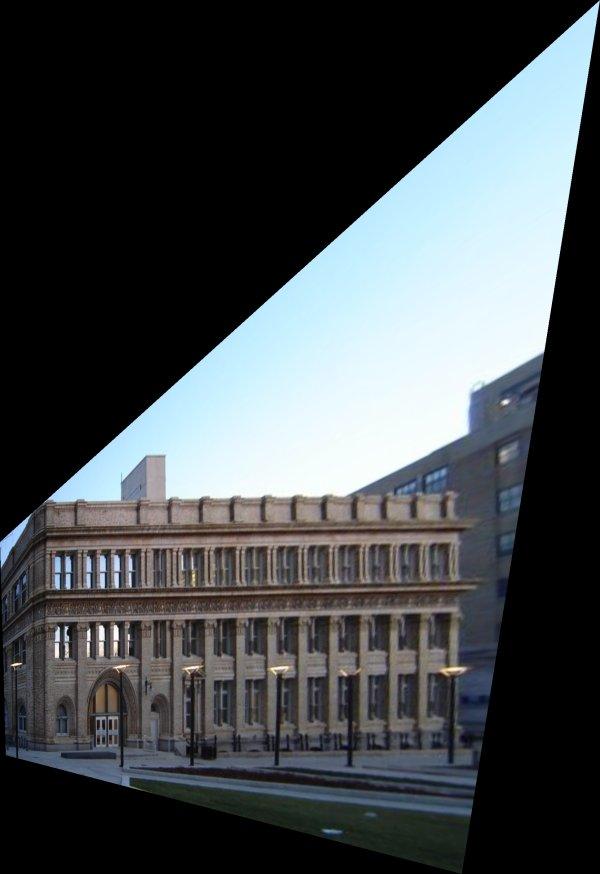
9 Example! Rectification This is your test image


10 Example! Rectification


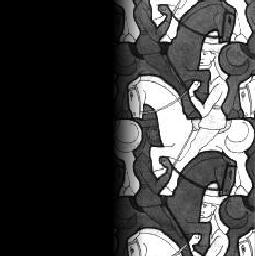
11 Example! Compositing This is your test image set


12 Example! Composite " Need not be rectangular " Masking and Blending




13 Example! Planar Mosaic (Extra Credit) Note that the COP is the same

14


15 by I. Zoghlami
16 Ingredients! Take good images! Specify correspondences (manual)! Compute homography " Solve with eigen decomposition! Apply homography " Warping " Interpolation " Masking " Blending
17 Image Warping h(x,y) y y x f(x,y) x g(x,y )! Given a coordinate transform (x,y ) = h(x,y) and a source image f(x,y), how do we compute a transformed image g(x,y ) = f(h(x,y))?
18 Forward Warping h(x,y) y y x f(x,y) x g(x,y )! Send each pixel f(x,y) to its corresponding location (x,y ) = h(x,y) in the second image Q: what if pixel lands between two pixels?
19 Forward Warping h(x,y) y y x f(x,y) x g(x,y )! Send each pixel f(x,y) to its corresponding location (x,y ) = h(x,y) in the second image Q: what if pixel lands between two pixels? A: distribute color among neighboring pixels (x,y ) Known as splatting
 x g(x,y )!")


20 Inverse Warping y h -1 (x,y) y x f(x,y) x g(x,y )! Get each pixel g(x,y ) from its corresponding location! (x,y) = h -1 (x,y ) in the first image Q: what if pixel comes from between two pixels?
21 Inverse Warping y h -1 (x,y) y x f(x,y) x g(x,y )! Get each pixel g(x,y ) from its corresponding location (x,y) = h -1 (x,y ) in the first image Q: what if pixel comes from between two pixels? A: resample color value
22 Forward vs. Inverse Warping! Q: which is better?! A: usually inverse eliminates holes " however, it requires an invertible warp function not always possible...
23 Bilinear Interpolation! A simple method for resampling images (i, j) a b


24 Image Blending

25 Feathering =
26 Effect of Window Size 1 left 1 0 right 0
27 Effect of Window Size
28 Good Window Size 1! Optimal window: smooth but not ghosted " Doesn t always work... 0



29 Pyramid Blending! Create a Laplacian pyramid, blend each level Burt, P. J. and Adelson, E. H., A multiresolution spline with applications to image mosaics, ACM Transactions on Graphics, 42(4), October 1983,
30 Alpha Blending I 3 p I 1 I 2 Encoding blend weights: I(x,y) = (!R,!G,!B,!) color at p = Implement this in two steps: 1. accumulate: add up the (! premultiplied) RGB! values at each pixel 2. normalize: divide each pixel s accumulated RGB by its! value Q: what if! = 0?

31 Poisson Image Editing! For more info: Perez et al, SIGGRAPH 2003 "
32 Project #1: Homography! Due 10/17 Sunday Midnight! See the assignment web page for details (3 artifacts for each task)! Skelton Code on the web " Fill in the empty functions " Write additional functions for extra credits! Cameras!
33 Image Filtering (Continuous) Reading: Robot Vision Chapter 6

34 What is an Image?
35 Image as a Function! We can think of an image as a function, f, from R 2 to R: " f (x, y) gives the intensity at position (x, y) " Realistically, we expect the image only to be defined over a rectangle, with a finite range: " f: [a,b]x[c,d] # [0,1]! A color image is just three functions pasted together. We can write this as a vector-valued function:

 y")
36 Image as a Function f(x,y) y x
37 Image Processing! Define a new image g in terms of an existing image f " We can transform either the domain or the range of f! Range transformation: What kinds of operations can this perform?
38 Image Processing! Some operations preserve the range but change the domain of f : What kinds of operations can this perform?
39 Image Processing! Still other operations operate on both the domain and the range of f.
40 Linear Shift Invariant Systems Linearity: Shift invariance:
41 Example of LSIS Defocused image ( g ) is a processed version of the focused image ( f ) Ideal lens is a LSIS LSIS Linearity: Brightness variation Shift invariance: Scene movement (not valid for lenses with non-linear distortions)
42 Convolution LSIS is doing convolution; convolution is linear and shift invariant ( ) = f " g x $ % ( )h( x #")d" g = f &h #$ kernel h
43 Convolution Eric Weisstein s Math World
44 Example of Convolution
45 Convolution Kernel! What h will give us g = f? Dirac Delta Function (Unit Impulse Function) Sifting property: $ $ % f ( x)" ( x)dx = % f ( 0)" ( x)dx #$ % ( ) = f " g x & & $% ( )# ( x $" )d" % = "(#)h( x $# )d# $% #$ = f 0 % ( )dx = f 0 $ ( ) " x #$ ( ) = f ( x) = h( x)
46 Point Spread Function scene Optical System image Ideally, the optical system is a dirac delta function. However, optical systems are never ideal. point source Optical System point spread func. Human eyes point spread function


47 Point Spread Function normal vision myopia hyperopia astigmatism Images by Richmond Eye Associates
48 Properties of Convolution! Commutative! Associative Cascade system
h( x #\" x,y #\" y )d\" x d\"")
49 2D Convolution ( ) = f " x," y g x $ $ % #$ #$ % ( )h( x #" x,y #" y )d" x d" y

50 Jean Baptiste Joseph Fourier ( )! Had crazy idea (1807): Any periodic function can be rewritten as a weighted sum of Sines and Cosines of different frequencies.! Don t believe it? " Neither did Lagrange, Laplace, Poisson and other big wigs " Not translated into English until 1878!! But it s true! " called Fourier Series " Possibly the greatest tool used in Engineering
51 A Sum of Sinusoids! Our building block:! Add enough of them to get any signal f(x) you want!
52 Time and Frequency
53 Time and Frequency = +
54 Frequency Spectra = +
55 Frequency Spectra! Usually, frequency is more interesting than the phase
56 Frequency Spectra = + =
57 Frequency Spectra = + =
58 Frequency Spectra = + =
59 Frequency Spectra = + =
60 Frequency Spectra = + =
61 Frequency Spectra =
62 Fourier Transform Represent the signal as an infinite weighted sum of an infinite number of sinusoids (u: oscillation frequency) F u Arbitrary function Spatial Domain (x) ( ) = f x Note: phase is encoded! by sin/cos pair! % Inverse Fourier Transform (IFT) f x % $ "$ $ ( ) = F u #$ ( )e "i2#ux dx Single Analytic Expression Frequency Domain (u) (Frequency Spectrum F(u)) ( )e i2"ux dx
63 Fourier Transform (Physicists Definition) Represent the signal as an infinite weighted sum of an infinite number of sinusoids (u: angular frequency) F u ( ) = f x Note: $ # "# ( )e "iux dx Arbitrary function Spatial Domain (x) Single Analytic Expression Frequency Domain (u) (Frequency Spectrum F(u)) Inverse Fourier Transform (IFT) f ( x) = 1 2" % $ #$ F( u)e iux dx
64 Fourier Transform Pairs (I) Play with Note that these are derived using angular frequency ( )
65 Fourier Transform Pairs (II) Note that these are derived using angular frequency ( )
66 Fourier Transform and Convolution Let Then G u g = f "h % $ ( ) = g x & "$ & ( )e "i2#ux dx % % = f (")h( x #")e #i2$ux d"dx & #% & #% % % = [ f (")e #i2$u" d" ][ h( x #")e #i2$u( x #" ) dx] #% #% & [ ] & h x' % = f (")e #i2$u" d" #% = F( u)h( u) Convolution in spatial domain ( )e #i2$ux' dx' % #%[ ] Multiplication in frequency domain
67 Fourier Transform and Convolution Spatial Domain (x) g = f "h g = fh Frequency Domain (u) G = FH G = F " H So, we can find g(x) by Fourier transform IFT. FT FT
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Announcements. Mosaics. Image Mosaics. How to do it? Basic Procedure Take a sequence of images from the same position =
 Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
Announcements. Mosaics. How to do it? Image Mosaics
 Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Image Stitching. Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi
 Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Image Warping and Mosacing
 Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 9: Image alignment http://www.wired.com/gadgetlab/2010/07/camera-software-lets-you-see-into-the-past/ Szeliski: Chapter 6.1 Reading All 2D Linear Transformations
CS4670: Computer Vision Noah Snavely Lecture 9: Image alignment http://www.wired.com/gadgetlab/2010/07/camera-software-lets-you-see-into-the-past/ Szeliski: Chapter 6.1 Reading All 2D Linear Transformations
Recap. DoF Constraint Solver. translation. affine. homography. 3D rotation
 Image Blending Recap DoF Constraint Solver translation affine homography 3D rotation Recap DoF Constraint Solver translation 2 affine homography 3D rotation Recap DoF Constraint Solver translation 2 affine
Image Blending Recap DoF Constraint Solver translation affine homography 3D rotation Recap DoF Constraint Solver translation 2 affine homography 3D rotation Recap DoF Constraint Solver translation 2 affine
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Final Exam Study Guide CSE/EE 486 Fall 2007
 Final Exam Study Guide CSE/EE 486 Fall 2007 Lecture 2 Intensity Sufaces and Gradients Image visualized as surface. Terrain concepts. Gradient of functions in 1D and 2D Numerical derivatives. Taylor series.
Final Exam Study Guide CSE/EE 486 Fall 2007 Lecture 2 Intensity Sufaces and Gradients Image visualized as surface. Terrain concepts. Gradient of functions in 1D and 2D Numerical derivatives. Taylor series.
Computer Vision and Graphics (ee2031) Digital Image Processing I
 Digital Image Processing I") Computer Vision and Graphics (ee203) Digital Image Processing I Dr John Collomosse J.Collomosse@surrey.ac.uk Centre for Vision, Speech and Signal Processing University of Surrey Learning Outcomes After
Computer Vision and Graphics (ee203) Digital Image Processing I Dr John Collomosse J.Collomosse@surrey.ac.uk Centre for Vision, Speech and Signal Processing University of Surrey Learning Outcomes After
Geometric Transformations and Image Warping
 Geometric Transformations and Image Warping Ross Whitaker SCI Institute, School of Computing University of Utah Univ of Utah, CS6640 2009 1 Geometric Transformations Greyscale transformations -> operate
Geometric Transformations and Image Warping Ross Whitaker SCI Institute, School of Computing University of Utah Univ of Utah, CS6640 2009 1 Geometric Transformations Greyscale transformations -> operate
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Reading. 2. Fourier analysis and sampling theory. Required: Watt, Section 14.1 Recommended:
 Reading Required: Watt, Section 14.1 Recommended: 2. Fourier analysis and sampling theory Ron Bracewell, The Fourier Transform and Its Applications, McGraw-Hill. Don P. Mitchell and Arun N. Netravali,
Reading Required: Watt, Section 14.1 Recommended: 2. Fourier analysis and sampling theory Ron Bracewell, The Fourier Transform and Its Applications, McGraw-Hill. Don P. Mitchell and Arun N. Netravali,
Fourier analysis and sampling theory
 Reading Required: Shirley, Ch. 9 Recommended: Fourier analysis and sampling theory Ron Bracewell, The Fourier Transform and Its Applications, McGraw-Hill. Don P. Mitchell and Arun N. Netravali, Reconstruction
Reading Required: Shirley, Ch. 9 Recommended: Fourier analysis and sampling theory Ron Bracewell, The Fourier Transform and Its Applications, McGraw-Hill. Don P. Mitchell and Arun N. Netravali, Reconstruction
Video Mosaics for Virtual Environments, R. Szeliski. Review by: Christopher Rasmussen
 Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
All good things must...
 Lecture 17 Final Review All good things must... UW CSE vision faculty Course Grading Programming Projects (80%) Image scissors (20%) -DONE! Panoramas (20%) - DONE! Content-based image retrieval (20%) -
Lecture 17 Final Review All good things must... UW CSE vision faculty Course Grading Programming Projects (80%) Image scissors (20%) -DONE! Panoramas (20%) - DONE! Content-based image retrieval (20%) -
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Image warping , , Computational Photography Fall 2017, Lecture 10
 Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
Image warping and stitching
 Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Digital Image Processing. Lecture 6
 Digital Image Processing Lecture 6 (Enhancement in the Frequency domain) Bu-Ali Sina University Computer Engineering Dep. Fall 2016 Image Enhancement In The Frequency Domain Outline Jean Baptiste Joseph
Digital Image Processing Lecture 6 (Enhancement in the Frequency domain) Bu-Ali Sina University Computer Engineering Dep. Fall 2016 Image Enhancement In The Frequency Domain Outline Jean Baptiste Joseph
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Lecture 4: Image Processing
 Lecture 4: Image Processing Definitions Many graphics techniques that operate only on images Image processing: operations that take images as input, produce images as output In its most general form, an
Lecture 4: Image Processing Definitions Many graphics techniques that operate only on images Image processing: operations that take images as input, produce images as output In its most general form, an
Introduction to Computer Vision. Week 8, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
CS223b Midterm Exam, Computer Vision. Monday February 25th, Winter 2008, Prof. Jana Kosecka
 CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Introduction to Digital Image Processing
 Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Computer Graphics. Texture Filtering & Sampling Theory. Hendrik Lensch. Computer Graphics WS07/08 Texturing
 Computer Graphics Texture Filtering & Sampling Theory Hendrik Lensch Overview Last time Texture Parameterization Procedural Shading Today Texturing Filtering 2D Texture Mapping Forward mapping Object surface
Computer Graphics Texture Filtering & Sampling Theory Hendrik Lensch Overview Last time Texture Parameterization Procedural Shading Today Texturing Filtering 2D Texture Mapping Forward mapping Object surface
Targil 10 : Why Mosaic? Why is this a challenge? Exposure differences Scene illumination Miss-registration Moving objects
 Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 5 x 35 Targil : Panoramas - Stitching and Blending Some slides from Alexei Efros 2 Slide from Brown & Lowe Why Mosaic? Are you getting
Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 5 x 35 Targil : Panoramas - Stitching and Blending Some slides from Alexei Efros 2 Slide from Brown & Lowe Why Mosaic? Are you getting
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Stitching and Blending
 Stitching and Blending Kari Pulli VP Computational Imaging Light First project Build your own (basic) programs panorama HDR (really, exposure fusion) The key components register images so their features
Stitching and Blending Kari Pulli VP Computational Imaging Light First project Build your own (basic) programs panorama HDR (really, exposure fusion) The key components register images so their features
Announcements. Image Matching! Source & Destination Images. Image Transformation 2/ 3/ 16. Compare a big image to a small image
 2/3/ Announcements PA is due in week Image atching! Leave time to learn OpenCV Think of & implement something creative CS 50 Lecture #5 February 3 rd, 20 2/ 3/ 2 Compare a big image to a small image So
2/3/ Announcements PA is due in week Image atching! Leave time to learn OpenCV Think of & implement something creative CS 50 Lecture #5 February 3 rd, 20 2/ 3/ 2 Compare a big image to a small image So
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
Today s lecture. Image Alignment and Stitching. Readings. Motion models
 Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Motivation. The main goal of Computer Graphics is to generate 2D images. 2D images are continuous 2D functions (or signals)
") Motivation The main goal of Computer Graphics is to generate 2D images 2D images are continuous 2D functions (or signals) monochrome f(x,y) or color r(x,y), g(x,y), b(x,y) These functions are represented
Motivation The main goal of Computer Graphics is to generate 2D images 2D images are continuous 2D functions (or signals) monochrome f(x,y) or color r(x,y), g(x,y), b(x,y) These functions are represented
Lecture 2: 2D Fourier transforms and applications
 Lecture 2: 2D Fourier transforms and applications B14 Image Analysis Michaelmas 2017 Dr. M. Fallon Fourier transforms and spatial frequencies in 2D Definition and meaning The Convolution Theorem Applications
Lecture 2: 2D Fourier transforms and applications B14 Image Analysis Michaelmas 2017 Dr. M. Fallon Fourier transforms and spatial frequencies in 2D Definition and meaning The Convolution Theorem Applications
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Compositing a bird's eye view mosaic
 Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
An introduction to 3D image reconstruction and understanding concepts and ideas
 Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Video Alignment. Final Report. Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin
 Final Report Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin Omer Shakil Abstract This report describes a method to align two videos.
Final Report Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin Omer Shakil Abstract This report describes a method to align two videos.
The main goal of Computer Graphics is to generate 2D images 2D images are continuous 2D functions (or signals)
") Motivation The main goal of Computer Graphics is to generate 2D images 2D images are continuous 2D functions (or signals) monochrome f(x,y) or color r(x,y), g(x,y), b(x,y) These functions are represented
Motivation The main goal of Computer Graphics is to generate 2D images 2D images are continuous 2D functions (or signals) monochrome f(x,y) or color r(x,y), g(x,y), b(x,y) These functions are represented
3. Image formation, Fourier analysis and CTF theory. Paula da Fonseca
 3. Image formation, Fourier analysis and CTF theory Paula da Fonseca EM course 2017 - Agenda - Overview of: Introduction to Fourier analysis o o o o Sine waves Fourier transform (simple examples of 1D
3. Image formation, Fourier analysis and CTF theory Paula da Fonseca EM course 2017 - Agenda - Overview of: Introduction to Fourier analysis o o o o Sine waves Fourier transform (simple examples of 1D
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
CS 1674: Intro to Computer Vision. Midterm Review. Prof. Adriana Kovashka University of Pittsburgh October 10, 2016
 CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
Lecture 16: Computer Vision
 CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
Midterm Exam Solutions
 Midterm Exam Solutions Computer Vision (J. Košecká) October 27, 2009 HONOR SYSTEM: This examination is strictly individual. You are not allowed to talk, discuss, exchange solutions, etc., with other fellow
Midterm Exam Solutions Computer Vision (J. Košecká) October 27, 2009 HONOR SYSTEM: This examination is strictly individual. You are not allowed to talk, discuss, exchange solutions, etc., with other fellow
Image formation. Thanks to Peter Corke and Chuck Dyer for the use of some slides
 Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Warping, Morphing and Mosaics
 Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Warping. 12 May 2015
 Warping 12 May 2015 Warping, morphing, mosaic Slides from Durand and Freeman (MIT), Efros (CMU, Berkeley), Szeliski (MSR), Seitz (UW), Lowe (UBC) http://szeliski.org/book/ 2 Image Warping Image filtering:
Warping 12 May 2015 Warping, morphing, mosaic Slides from Durand and Freeman (MIT), Efros (CMU, Berkeley), Szeliski (MSR), Seitz (UW), Lowe (UBC) http://szeliski.org/book/ 2 Image Warping Image filtering:
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 8: Geometric transformations Szeliski: Chapter 3.6 Reading Announcements Project 2 out today, due Oct. 4 (demo at end of class today) Image alignment Why don
CS467: Computer Vision Noah Snavely Lecture 8: Geometric transformations Szeliski: Chapter 3.6 Reading Announcements Project 2 out today, due Oct. 4 (demo at end of class today) Image alignment Why don
Geometric Transformations and Image Warping Chapter 2.6.5
 Geometric Transformations and Image Warping Chapter 2.6.5 Ross Whitaker (modified by Guido Gerig) SCI Institute, School of Computing University of Utah Univ of Utah, CS6640 2010 1 Geometric Transformations
Geometric Transformations and Image Warping Chapter 2.6.5 Ross Whitaker (modified by Guido Gerig) SCI Institute, School of Computing University of Utah Univ of Utah, CS6640 2010 1 Geometric Transformations
Image Restoration. Yao Wang Polytechnic Institute of NYU, Brooklyn, NY 11201
 Image Restoration Yao Wang Polytechnic Institute of NYU, Brooklyn, NY 11201 Partly based on A. K. Jain, Fundamentals of Digital Image Processing, and Gonzalez/Woods, Digital Image Processing Figures from
Image Restoration Yao Wang Polytechnic Institute of NYU, Brooklyn, NY 11201 Partly based on A. K. Jain, Fundamentals of Digital Image Processing, and Gonzalez/Woods, Digital Image Processing Figures from
Photometric Processing
 Photometric Processing 1 Histogram Probability distribution of the different grays in an image 2 Contrast Enhancement Limited gray levels are used Hence, low contrast Enhance contrast 3 Histogram Stretching
Photometric Processing 1 Histogram Probability distribution of the different grays in an image 2 Contrast Enhancement Limited gray levels are used Hence, low contrast Enhance contrast 3 Histogram Stretching
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Perspective Projection [2 pts]
![Perspective Projection [2 pts]](/thumbs/77/75160998.jpg "Perspective Projection [2 pts]") Instructions: CSE252a Computer Vision Assignment 1 Instructor: Ben Ochoa Due: Thursday, October 23, 11:59 PM Submit your assignment electronically by email to iskwak+252a@cs.ucsd.edu with the subject line
Instructions: CSE252a Computer Vision Assignment 1 Instructor: Ben Ochoa Due: Thursday, October 23, 11:59 PM Submit your assignment electronically by email to iskwak+252a@cs.ucsd.edu with the subject line
Image preprocessing in spatial domain
 Image preprocessing in spatial domain Sampling theorem, aliasing, interpolation, geometrical transformations Revision:.4, dated: May 25, 26 Tomáš Svoboda Czech Technical University, Faculty of Electrical
Image preprocessing in spatial domain Sampling theorem, aliasing, interpolation, geometrical transformations Revision:.4, dated: May 25, 26 Tomáš Svoboda Czech Technical University, Faculty of Electrical
More Mosaic Madness. CS194: Image Manipulation & Computational Photography. Steve Seitz and Rick Szeliski. Jeffrey Martin (jeffrey-martin.
 More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
Image preprocessing in spatial domain
 Image preprocessing in spatial domain Sampling theorem, aliasing, interpolation, geometrical transformations Revision:.3, dated: December 7, 25 Tomáš Svoboda Czech Technical University, Faculty of Electrical
Image preprocessing in spatial domain Sampling theorem, aliasing, interpolation, geometrical transformations Revision:.3, dated: December 7, 25 Tomáš Svoboda Czech Technical University, Faculty of Electrical
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Image Warping: A Review. Prof. George Wolberg Dept. of Computer Science City College of New York
 Image Warping: A Review Prof. George Wolberg Dept. of Computer Science City College of New York Objectives In this lecture we review digital image warping: - Geometric transformations - Forward inverse
Image Warping: A Review Prof. George Wolberg Dept. of Computer Science City College of New York Objectives In this lecture we review digital image warping: - Geometric transformations - Forward inverse
Nonlinear Multiresolution Image Blending
 Nonlinear Multiresolution Image Blending Mark Grundland, Rahul Vohra, Gareth P. Williams and Neil A. Dodgson Computer Laboratory, University of Cambridge, United Kingdom October, 26 Abstract. We study
Nonlinear Multiresolution Image Blending Mark Grundland, Rahul Vohra, Gareth P. Williams and Neil A. Dodgson Computer Laboratory, University of Cambridge, United Kingdom October, 26 Abstract. We study
Cameras and Stereo CSE 455. Linda Shapiro
 Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Local features and image matching May 8 th, 2018
 Local features and image matcing May 8 t, 2018 Yong Jae Lee UC Davis Last time RANSAC for robust fitting Lines, translation Image mosaics Fitting a 2D transformation Homograpy 2 Today Mosaics recap: How
Local features and image matcing May 8 t, 2018 Yong Jae Lee UC Davis Last time RANSAC for robust fitting Lines, translation Image mosaics Fitting a 2D transformation Homograpy 2 Today Mosaics recap: How
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
Edge Detection. CS664 Computer Vision. 3. Edges. Several Causes of Edges. Detecting Edges. Finite Differences. The Gradient
 Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
16720: Computer Vision Homework 1
 16720: Computer Vision Homework 1 Instructor: Martial Hebert TAs: Varun Ramakrishna and Tomas Simon Instructions A complete homework submission consists of two parts. A pdf file with answers to the theory
16720: Computer Vision Homework 1 Instructor: Martial Hebert TAs: Varun Ramakrishna and Tomas Simon Instructions A complete homework submission consists of two parts. A pdf file with answers to the theory
Lecture 5: Frequency Domain Transformations
 #1 Lecture 5: Frequency Domain Transformations Saad J Bedros sbedros@umn.edu From Last Lecture Spatial Domain Transformation Point Processing for Enhancement Area/Mask Processing Transformations Image
#1 Lecture 5: Frequency Domain Transformations Saad J Bedros sbedros@umn.edu From Last Lecture Spatial Domain Transformation Point Processing for Enhancement Area/Mask Processing Transformations Image
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COMPUTER VISION > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE
 COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Computer Vision I. Announcement. Stereo Vision Outline. Stereo II. CSE252A Lecture 15
 Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
CS 664 Slides #9 Multi-Camera Geometry. Prof. Dan Huttenlocher Fall 2003
 CS 664 Slides #9 Multi-Camera Geometry Prof. Dan Huttenlocher Fall 2003 Pinhole Camera Geometric model of camera projection Image plane I, which rays intersect Camera center C, through which all rays pass
CS 664 Slides #9 Multi-Camera Geometry Prof. Dan Huttenlocher Fall 2003 Pinhole Camera Geometric model of camera projection Image plane I, which rays intersect Camera center C, through which all rays pass
Reminder: Lecture 20: The Eight-Point Algorithm. Essential/Fundamental Matrix. E/F Matrix Summary. Computing F. Computing F from Point Matches
 Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Final Review CMSC 733 Fall 2014
 Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Image Composition. COS 526 Princeton University
 Image Composition COS 526 Princeton University Modeled after lecture by Alexei Efros. Slides by Efros, Durand, Freeman, Hays, Fergus, Lazebnik, Agarwala, Shamir, and Perez. Image Composition Jurassic Park
Image Composition COS 526 Princeton University Modeled after lecture by Alexei Efros. Slides by Efros, Durand, Freeman, Hays, Fergus, Lazebnik, Agarwala, Shamir, and Perez. Image Composition Jurassic Park
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Image Compositing and Blending
 Computational Photography and Capture: Image Compositing and Blending Gabriel Brostow & Tim Weyrich TA: Frederic Besse Vignetting 3 Figure from http://www.vanwalree.com/optics/vignetting.html Radial Distortion
Computational Photography and Capture: Image Compositing and Blending Gabriel Brostow & Tim Weyrich TA: Frederic Besse Vignetting 3 Figure from http://www.vanwalree.com/optics/vignetting.html Radial Distortion