Computational Photography and Video: Intrinsic Images. Prof. Marc Pollefeys Dr. Gabriel Brostow
|
|
|
- Clinton Page
- 6 years ago
- Views:
Transcription

1 Computational Photography and Video: Intrinsic Images Prof. Marc Pollefeys Dr. Gabriel Brostow
2 Last Week
3 Schedule Computational Photography and Video Exercises 18 Feb Introduction to Computational Photography 25 Feb More on Cameras, Sensors and Color Assignment 1: Color 4 Mar Warping, morphing and mosaics Assignment 2: Alignment 11 Mar Image pyramids, Graphcuts Assignment 3: Blending 18 Mar Dynamic Range, HDR imaging, tone mapping Assignment 4: HDR 25 Mar Video Synthesis I Papers 1 Apr Video Synthesis II Papers 8 Apr Intrinsic Images Project proposals 15 Apr Easter holiday no classes 22 Apr Vectorizing Rasters Papers 29 Apr Non-photorealistic Rendering & Animation Project updates 6 May Time-Lapse Video Papers 13 May (Re)Coloring Papers 20 May Video Based Rendering Optional team meetings 27 May Final Project Presentations I Project Presentations II

4 Example Problem: Background Normalization
5 When taking a picture, what color is a (Lambertian) surface?


6

7 Region lit by skylight only Region lit by sunlight and skylight
8 What great things could we do if we could easily find shadows?


9

10

11

12 An Intrinsic Image What effect is the lighting having, irrespective of surface materials? What is the surface reflectance, irrespective of lighting? Tappen et al. PAMI 05 Original Lighting/Shading Reflectance

13 Pursuit of Intrinsic Images (1) Lightness and Retinex Theory Land & McCann 71 Recovering Intrinsic Scene Characteristics From Images Barrow & Tenenbaum 78
14 Pursuit of Intrinsic Images (2) Painted Polyhedra - ICCV 93 Image Sequences - ICCV 01 Single Image - NIPS 03 Entropy Minimization - ECCV 04
15 Pursuit of Intrinsic Images (2) Painted Polyhedra - ICCV 93 (Generative) Image Sequences - ICCV 01 (Discriminative) Single Image - NIPS 03 (Discriminative) Entropy Minimization - ECCV 04 (Generative)
16 I

17 Painted Polyhedra Recovering Reflectance and Illumination in a World of Painted Polyhedra Sinha & Adelson, ICCV 93

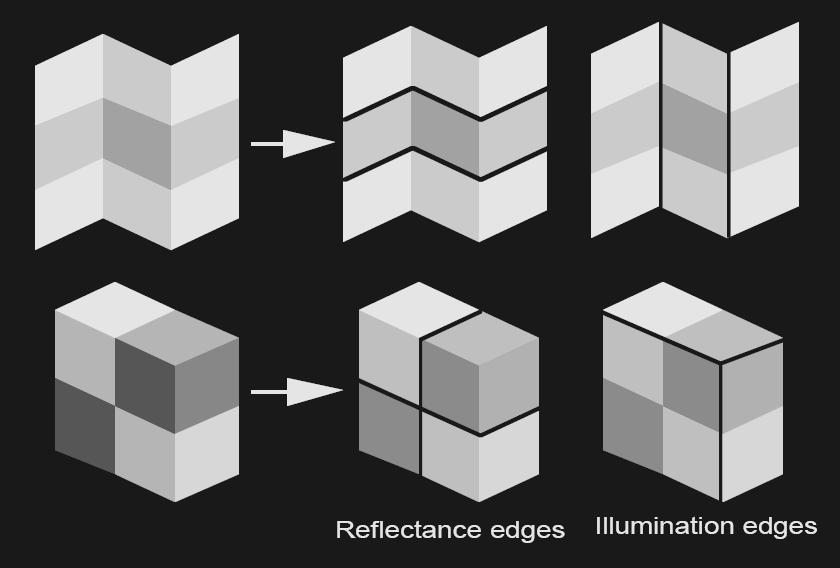
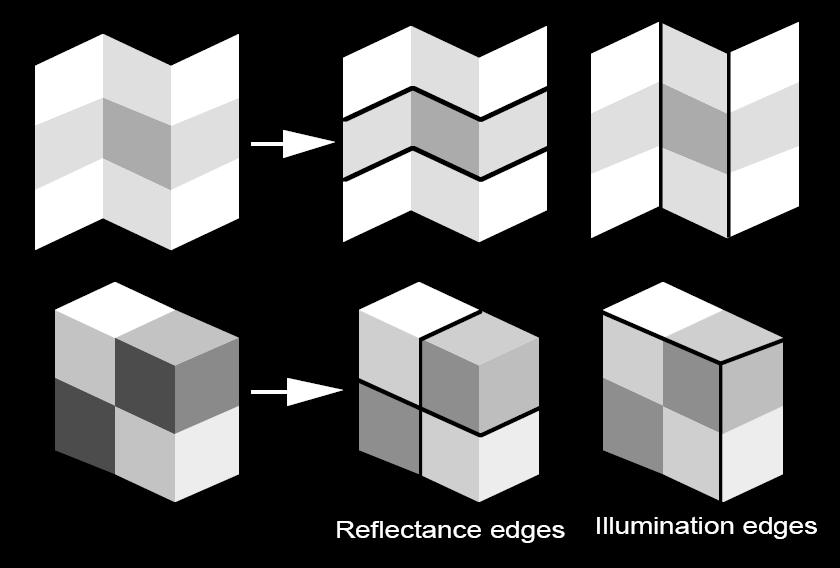
18 Not All Edges are Equal

19 Local Edges are a Hint?

20 Edge Junctions are Useful
21 Junction Catalog Y, arrow, and psi junctions T junctions
22 Examples
23 Examples
24 Examples
25 Examples
26 Examples
27 Examples

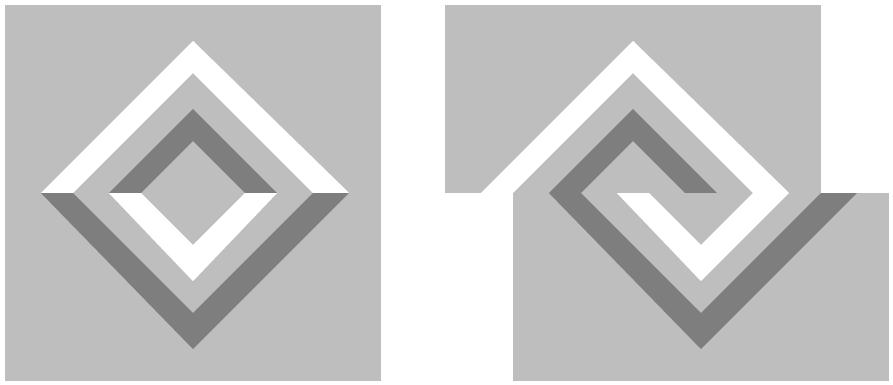
28 Junction Analysis of the Impossible Object


29
30 Counter-Example
31 Consistency Check
32 Global Measures of Correctness Low variance of angles Planarity of faces Overall compactness Consistency with light source
33 Global Measures of Correctness Low variance of angles Planarity of faces Overall compactness Consistency with light source

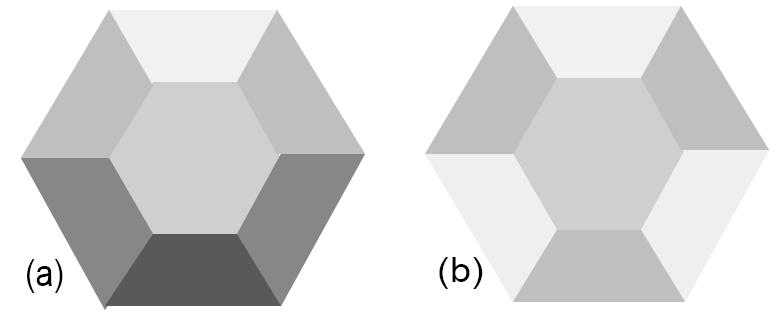
34 Possibility of Consistent Lighting

35 Global Analysis Confirms Local Analysis

36 Global Analysis Trumps Local Analysis
37 II

38 Image Sequences Deriving Intrinsic Images from Image Sequences Weiss ICCV 01 For static objects, multiple frames
 = L( x, y) R( x, y) reflectance image and T T T { I( x, y, t)} { L( x, y, t)} 1 1 = t = t= R( x, y) Still")
39 Problem Formulation Given a sequence of T images I( x, y, t)} in which reflectance is constant over T Illumination images L( x, y, t)}? { t= 1 T { t= 1 time and only the illumination changes, can we solve for a single I ( x, y) = L( x, y) R( x, y) reflectance image and T T T { I( x, y, t)} { L( x, y, t)} 1 1 = t = t= R( x, y) Still completely ill-posed : at every pixel there are T equations and T+1 unknowns.
,, ( ), ( ),, ( t y x l y x r t y x i + = (move to log-space) n f n t y x i t y x o = ),, ( ),, ( f n = one of N filters like 1-1")
40 Prior based on intuition: derivative-like filter outputs of L tend to be sparse ), ( )},, ( { )},, ( { 1 1 y x R t y x L t y x I T t T t = = = ),, ( ), ( ),, ( t y x l y x r t y x i + = (move to log-space) n f n t y x i t y x o = ),, ( ),, ( f n = one of N filters like 1-1

41 rˆ n = median t ( o n ( x, y, t)) o ( x, y, t) = i( x, y, t) n f n Variety of responses has Laplacian-shaped distribution

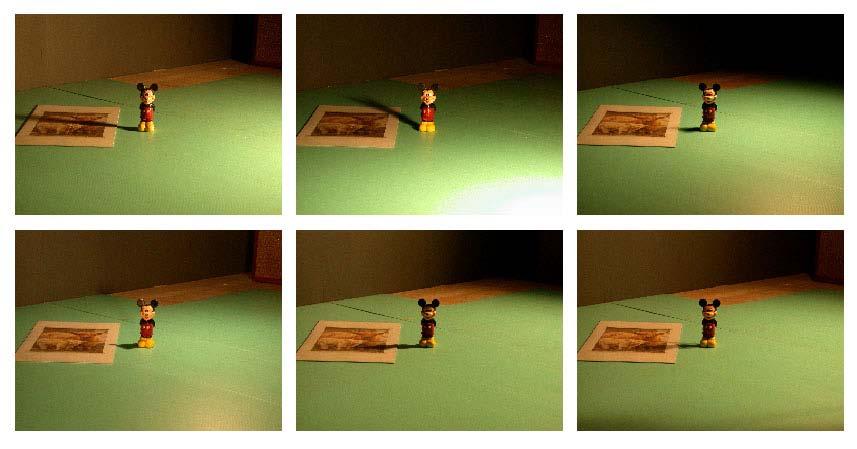
42 Toy Example

43 Example Result 1 Einstein image is translated diagonally 4 pixels per frame

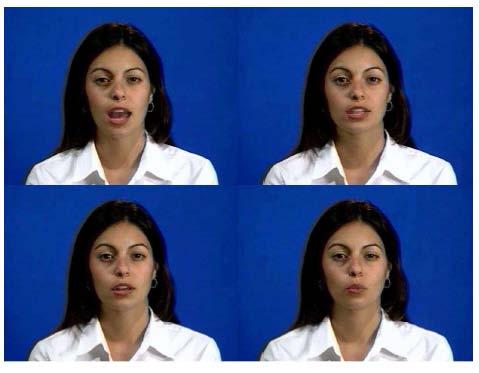
44 Example Result 2 64 images with variable lighting from Yale Face Database
45 III

46 Single Image Recovering Intrinsic Images from a Single Image Tappen, Freeman, Adelson NIPS 03 & PAMI 05

47 Assumption Each derivative is caused either by Shading or Reflectance Reduces to a binary classification problem Image Derivative w.r.t. x and y
48 Classifying Derivatives 4 Basic phases: 1. Compute image derivatives 2. Classify each derivative as caused by shading or reflectance 3. Invert derivatives classified as shading to find shading images 4. Reflectance image is found the same way
49 1. Color information Classification - changes due to shading should affect R,G and B proportionally C = α 1 C 2 If C1 α C 2 the changes are caused by reflectance


50 Color Information - examples Black on white may be interpreted as intensity change. Resulting in misclassification
51 1. Color information Classification - changes due to shading should affect R,G and B proportionally C = α 1 C 2 If C1 α C 2 the changes are caused by reflectance




52 1. Color information Classification - changes due to shading should affect R,G and B proportionally C = α 1 C 2 If C1 α C 2 the changes are caused by reflectance 2. Statistical regularities of surfaces


53 GrayScale Information - examples Misclassification of the cheeks due to weak gradients

54 Combing Information (Assuming Statistical Indep.)


55 Handling Ambiguities Ambiguities - for example center of the mouth Shading example Input image Reflectance example
56 Handling Ambiguities Derivatives that lie on the same contour should have the same classification The mouth corners are well classified as reflectance Propagate evidence from conclusive areas to ambiguous ones using MRF


57 Unpropagated Final Results



58 Final Results


59 Final Results

60 Final Results
61 IV

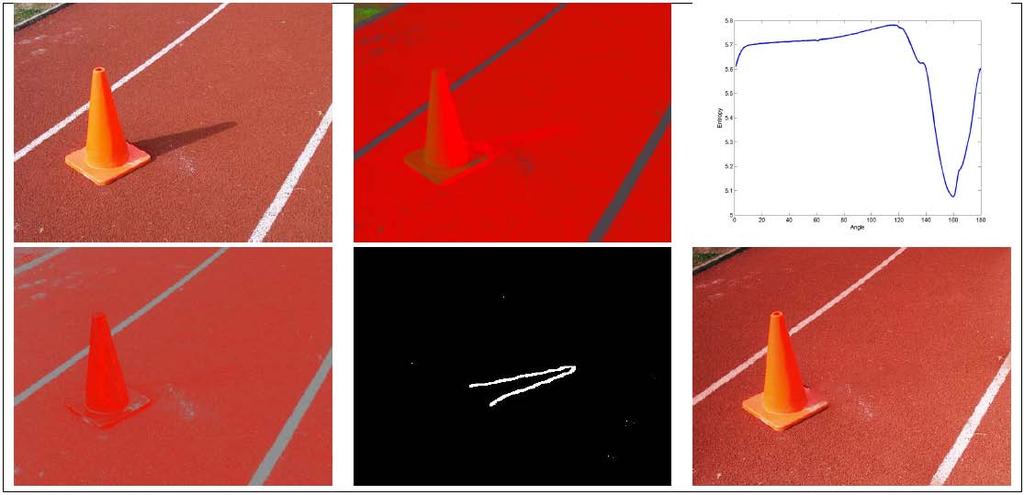
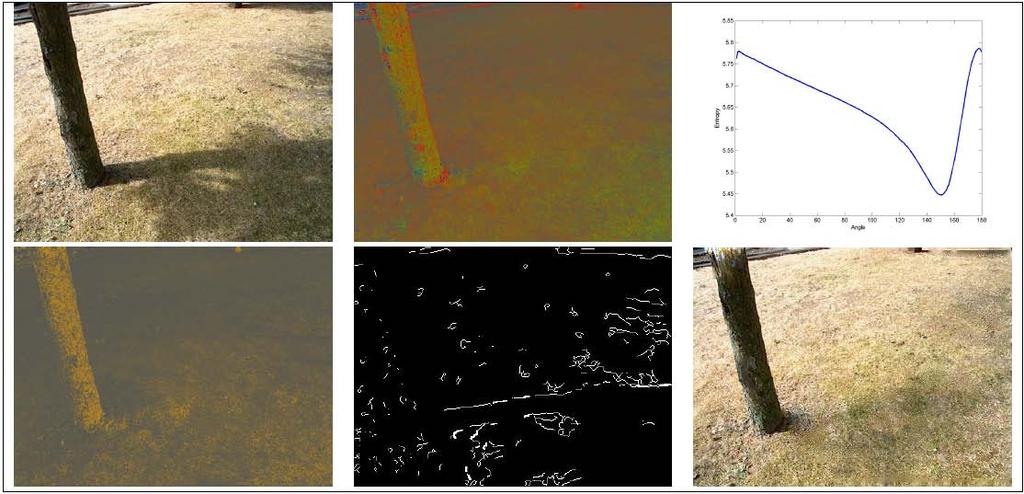
62 Entropy Minimization Intrinsic Images by Entropy Minimization Finlayson, Drew, Lu, ECCV 04
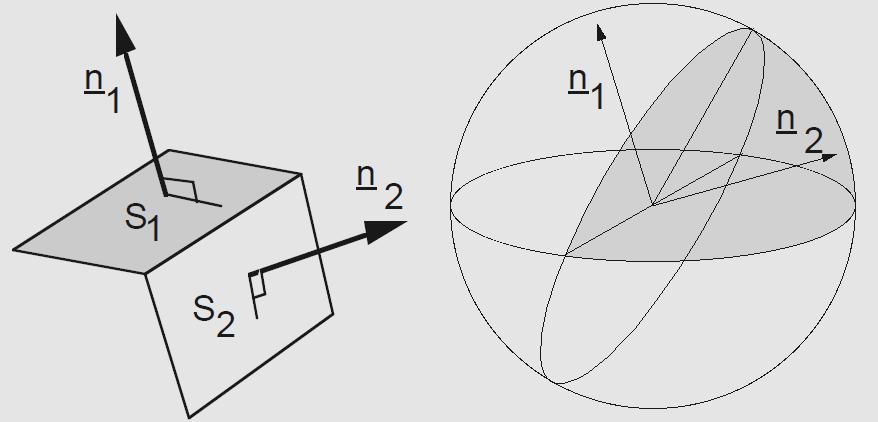
63 Sensor Response at a Pixel p = R( λ) L( λ) S ( λ) d k k λ λ R = Reflectance L = Illumination S = Sensor Sensitivity
64 Best When Sensors are Narrow Band
65 Best When Sensors are Narrow Band S k ( λ) = δ ( λ λ ) k k { R, G, B}
66 Just Reflectance & Illumination = λ λ λ λ λ d S L R p k k ) ( ) ( ) ( = λ λ λ λ δ λ λ d L R p k k ) ( ) ( ) ( ) ( ) ( k k k L R p λ λ =
67 Chromaticity for 7 Surfaces for 10 Illuminants

68 Macbeth Chart Under Changing Illumination
69 Entropy Minimization Correct Projection Incorrect Projection
70 Entropy Minimization More spread-out distribution would produce a larger entropy, hence the projection direction that produces the minimum entropy is the correct projection direction

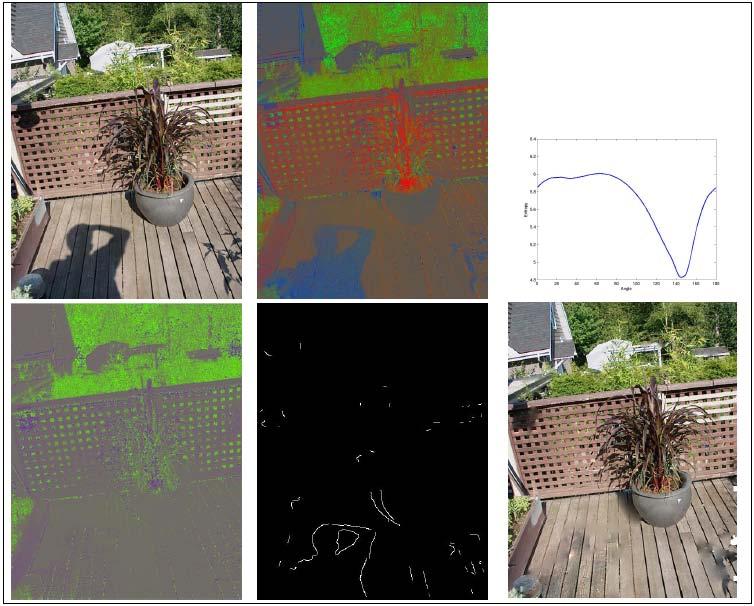
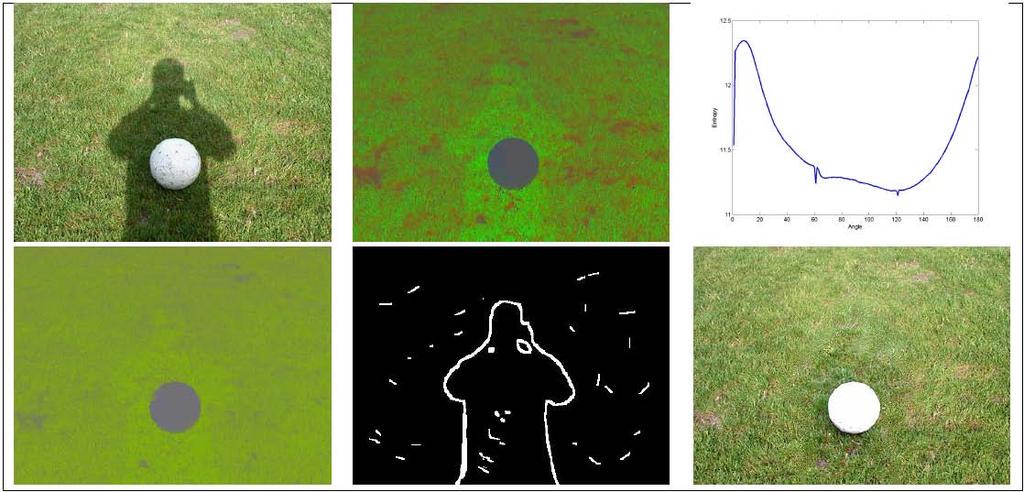
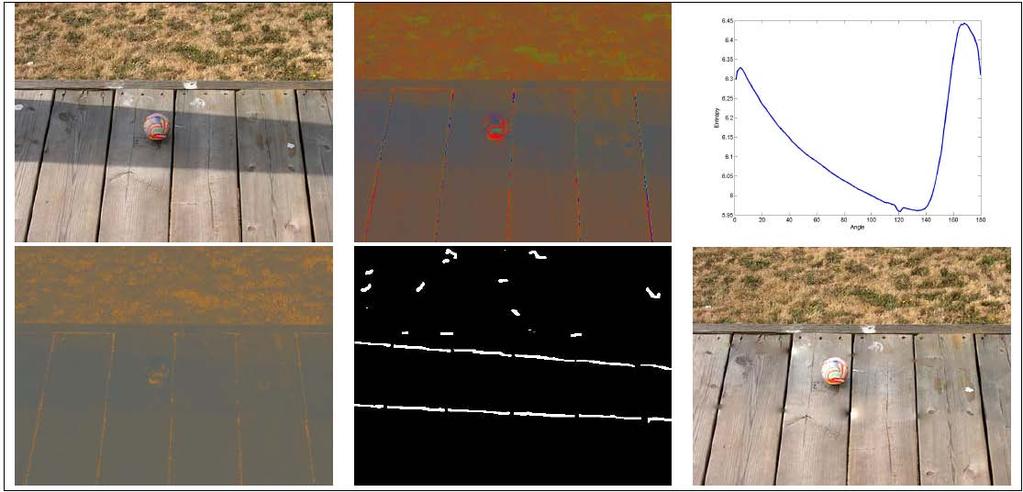
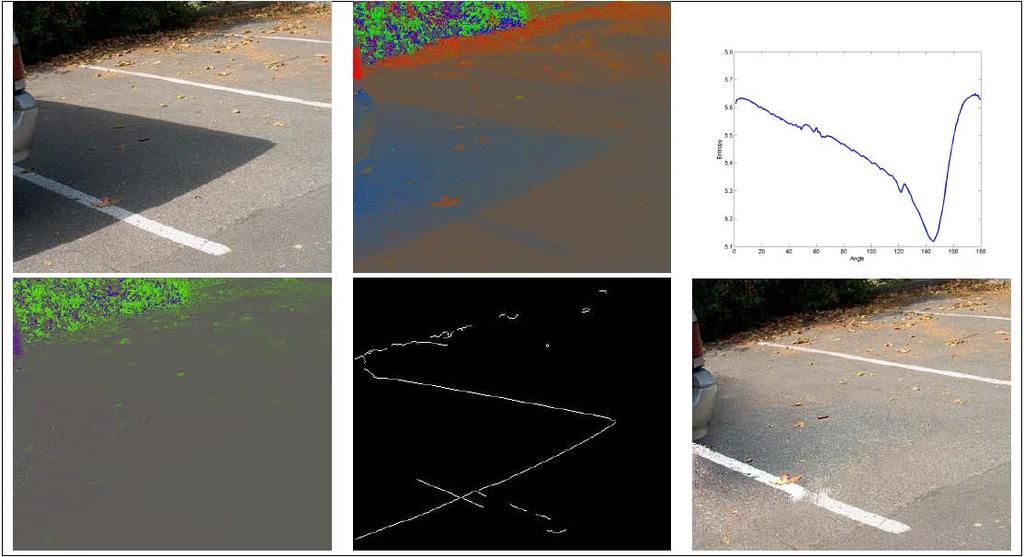
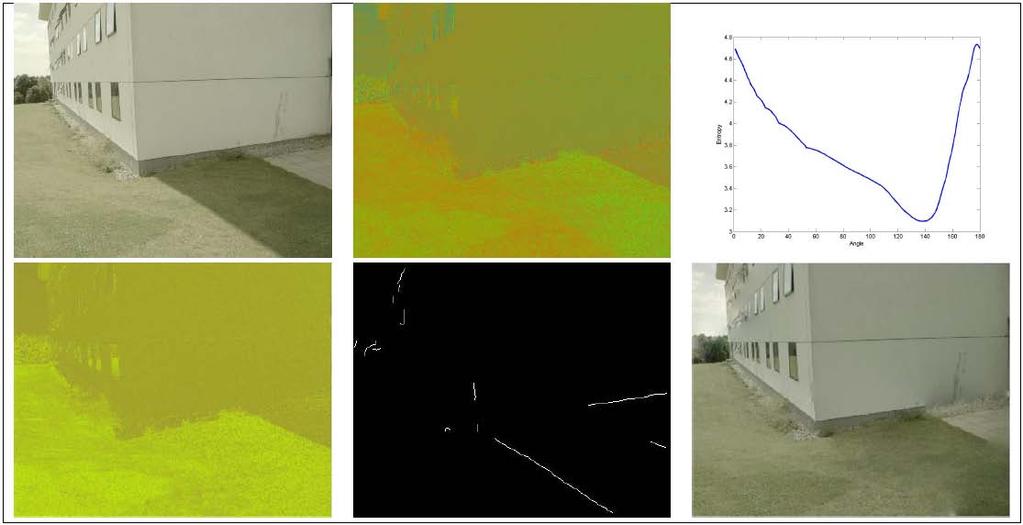
71 Sweep Angle of Projection


72 Entropy Plot Image Chromaticity Recovered Chromaticity
73

74

75

76

77

78

79
80 Limitations of Shadow Removal Only Hard shadows can be removed No overlapping of object and shadow boundaries Planckian light sources Narrow band cameras are idealized Reconstruction methods are texture-dumb
81 Discussion
82
83
84 Assumptions for Both Entropy Min. & Image Seq. Each edge can be a shadow border OR a change in the reflectance image Remove the shadow edges and get the reflectance image Both algorithms uses the same reconstruction method In real life there are soft shadow and vague shadow edges. In many cases there will be mixed edges so the separation can not be easily done The second algorithm is more sensitive because it is has less redundancy (one image only!)
85 Modern Intrinsic Images Refs Recovering Reflectance and Illumination in a World of Painted Polyhedra Sinha & Adelson ICCV 93 Deriving Intrinsic Images from Image Sequences Weiss ICCV 01 Recovering Intrinsic Images from a Single Image Tappen, Freeman, Adelson NIPS 03 Intrinsic Images by Entropy Minimization Finlayson, Drew, Lu, ECCV 04
86
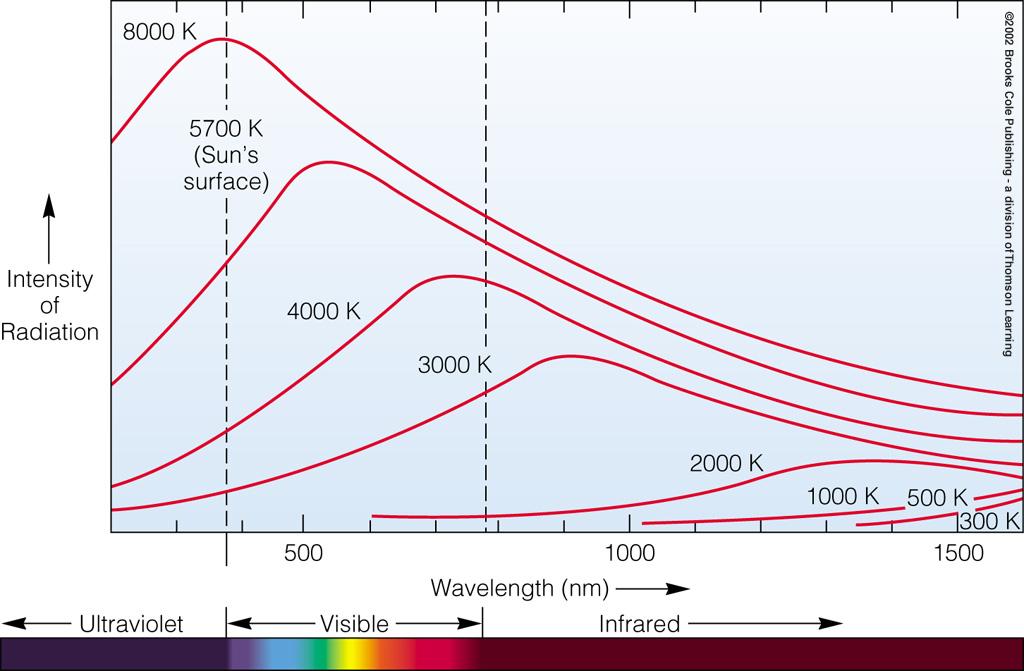
87 Property of illuminator: Planck s Law Planck s Law defines the energy emission rate of a blackbody illuminator, in unit of watts per square meter per wavelength interval, as a function of wavelength λ (in meters) and temperature T (in degrees Kelvin). c2 5 T Pr ( λ) = c1λ e λ 1 Spectral power: 1 Where c 1 = Wm -2 c 1 = mk c 1 5 T 5 1 λ λt E( λ) = I Pr = Ic λ e 1 Ic λ e ; c and are constants. I is the illumination intensity
88
89 Calibration results Nikon CoolPix 995 Nikon D-100
Lecture 24: More on Reflectance CAP 5415
 Lecture 24: More on Reflectance CAP 5415 Recovering Shape We ve talked about photometric stereo, where we assumed that a surface was diffuse Could calculate surface normals and albedo What if the surface
Lecture 24: More on Reflectance CAP 5415 Recovering Shape We ve talked about photometric stereo, where we assumed that a surface was diffuse Could calculate surface normals and albedo What if the surface
Recovering Intrinsic Images from a Single Image
 Recovering Intrinsic Images from a Single Image Marshall F Tappen William T Freeman Edward H Adelson MIT Artificial Intelligence Laboratory Cambridge, MA 02139 mtappen@ai.mit.edu, wtf@ai.mit.edu, adelson@ai.mit.edu
Recovering Intrinsic Images from a Single Image Marshall F Tappen William T Freeman Edward H Adelson MIT Artificial Intelligence Laboratory Cambridge, MA 02139 mtappen@ai.mit.edu, wtf@ai.mit.edu, adelson@ai.mit.edu
Estimating the wavelength composition of scene illumination from image data is an
 Chapter 3 The Principle and Improvement for AWB in DSC 3.1 Introduction Estimating the wavelength composition of scene illumination from image data is an important topics in color engineering. Solutions
Chapter 3 The Principle and Improvement for AWB in DSC 3.1 Introduction Estimating the wavelength composition of scene illumination from image data is an important topics in color engineering. Solutions
Intrinsic Image Decomposition with Non-Local Texture Cues
 Intrinsic Image Decomposition with Non-Local Texture Cues Li Shen Microsoft Research Asia Ping Tan National University of Singapore Stephen Lin Microsoft Research Asia Abstract We present a method for
Intrinsic Image Decomposition with Non-Local Texture Cues Li Shen Microsoft Research Asia Ping Tan National University of Singapore Stephen Lin Microsoft Research Asia Abstract We present a method for
Removing Shadows from Images
 Removing Shadows from Images Zeinab Sadeghipour Kermani School of Computing Science Simon Fraser University Burnaby, BC, V5A 1S6 Mark S. Drew School of Computing Science Simon Fraser University Burnaby,
Removing Shadows from Images Zeinab Sadeghipour Kermani School of Computing Science Simon Fraser University Burnaby, BC, V5A 1S6 Mark S. Drew School of Computing Science Simon Fraser University Burnaby,
Color Constancy from Illumination Changes
 (MIRU2004) 2004 7 153-8505 4-6-1 E E-mail: {rei,robby,ki}@cvl.iis.u-tokyo.ac.jp Finlayson [10] Color Constancy from Illumination Changes Rei KAWAKAMI,RobbyT.TAN, and Katsushi IKEUCHI Institute of Industrial
(MIRU2004) 2004 7 153-8505 4-6-1 E E-mail: {rei,robby,ki}@cvl.iis.u-tokyo.ac.jp Finlayson [10] Color Constancy from Illumination Changes Rei KAWAKAMI,RobbyT.TAN, and Katsushi IKEUCHI Institute of Industrial
Computational Photography and Capture: (Re)Coloring. Gabriel Brostow & Tim Weyrich TA: Frederic Besse
Coloring. Gabriel Brostow & Tim Weyrich TA: Frederic Besse") Computational Photography and Capture: (Re)Coloring Gabriel Brostow & Tim Weyrich TA: Frederic Besse Week Date Topic Hours 1 12-Jan Introduction to Computational Photography and Capture 1 1 14-Jan Intro
Computational Photography and Capture: (Re)Coloring Gabriel Brostow & Tim Weyrich TA: Frederic Besse Week Date Topic Hours 1 12-Jan Introduction to Computational Photography and Capture 1 1 14-Jan Intro
Shadow Removal from a Single Image
 Shadow Removal from a Single Image Li Xu Feihu Qi Renjie Jiang Department of Computer Science and Engineering, Shanghai JiaoTong University, P.R. China E-mail {nathan.xu, fhqi, blizard1982}@sjtu.edu.cn
Shadow Removal from a Single Image Li Xu Feihu Qi Renjie Jiang Department of Computer Science and Engineering, Shanghai JiaoTong University, P.R. China E-mail {nathan.xu, fhqi, blizard1982}@sjtu.edu.cn
Geometric and Photometric Restoration of Distorted Documents
 Geometric and Photometric Restoration of Distorted Documents Mingxuan Sun, Ruigang Yang, Lin Yun, George Landon, Brent Seales University of Kentucky Lexington, KY Michael S. Brown Cal State - Monterey
Geometric and Photometric Restoration of Distorted Documents Mingxuan Sun, Ruigang Yang, Lin Yun, George Landon, Brent Seales University of Kentucky Lexington, KY Michael S. Brown Cal State - Monterey
Physics-based Vision: an Introduction
 Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Estimating Intrinsic Images from Image Sequences with Biased Illumination
 Estimating Intrinsic Images from Image Sequences with Biased Illumination Yasuyuki Matsushita 1, Stephen Lin 1, Sing Bing Kang 2, and Heung-Yeung Shum 1 1 Microsoft Research Asia 3F, Beijing Sigma Center,
Estimating Intrinsic Images from Image Sequences with Biased Illumination Yasuyuki Matsushita 1, Stephen Lin 1, Sing Bing Kang 2, and Heung-Yeung Shum 1 1 Microsoft Research Asia 3F, Beijing Sigma Center,
INTRINSIC IMAGE DECOMPOSITION BY HIERARCHICAL L 0 SPARSITY
 INTRINSIC IMAGE DECOMPOSITION BY HIERARCHICAL L 0 SPARSITY Xuecheng Nie 1,2, Wei Feng 1,3,, Liang Wan 2,3, Haipeng Dai 1, Chi-Man Pun 4 1 School of Computer Science and Technology, Tianjin University,
INTRINSIC IMAGE DECOMPOSITION BY HIERARCHICAL L 0 SPARSITY Xuecheng Nie 1,2, Wei Feng 1,3,, Liang Wan 2,3, Haipeng Dai 1, Chi-Man Pun 4 1 School of Computer Science and Technology, Tianjin University,
Image Compositing and Blending
 Computational Photography and Capture: Image Compositing and Blending Gabriel Brostow & Tim Weyrich TA: Frederic Besse Vignetting 3 Figure from http://www.vanwalree.com/optics/vignetting.html Radial Distortion
Computational Photography and Capture: Image Compositing and Blending Gabriel Brostow & Tim Weyrich TA: Frederic Besse Vignetting 3 Figure from http://www.vanwalree.com/optics/vignetting.html Radial Distortion
INTRINSIC IMAGE EVALUATION ON SYNTHETIC COMPLEX SCENES
 INTRINSIC IMAGE EVALUATION ON SYNTHETIC COMPLEX SCENES S. Beigpour, M. Serra, J. van de Weijer, R. Benavente, M. Vanrell, O. Penacchio, D. Samaras Computer Vision Center, Universitat Auto noma de Barcelona,
INTRINSIC IMAGE EVALUATION ON SYNTHETIC COMPLEX SCENES S. Beigpour, M. Serra, J. van de Weijer, R. Benavente, M. Vanrell, O. Penacchio, D. Samaras Computer Vision Center, Universitat Auto noma de Barcelona,
Introduction to Computer Vision. Week 8, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Learning Continuous Models for Estimating Intrinsic Component Images. Marshall Friend Tappen
 Learning Continuous Models for Estimating Intrinsic Component Images by Marshall Friend Tappen B.S. Computer Science, Brigham Young University, 2000 S.M. Electrical Engineering and Computer Science, Massachusetts
Learning Continuous Models for Estimating Intrinsic Component Images by Marshall Friend Tappen B.S. Computer Science, Brigham Young University, 2000 S.M. Electrical Engineering and Computer Science, Massachusetts
Deriving intrinsic images from image sequences
 Deriving intrinsic images from image sequences Yair Weiss Computer Science Division UC Berkeley Berkeley, CA 94720-1776 yweiss@cs.berkeley.edu Abstract Intrinsic images are a useful midlevel description
Deriving intrinsic images from image sequences Yair Weiss Computer Science Division UC Berkeley Berkeley, CA 94720-1776 yweiss@cs.berkeley.edu Abstract Intrinsic images are a useful midlevel description
Ground truth dataset and baseline evaluations for intrinsic image algorithms
 Ground truth dataset and baseline evaluations for intrinsic image algorithms Roger Grosse Micah K. Johnson Edward H. Adelson William T. Freeman Massachusetts Institute of Technology Cambridge, MA 02139
Ground truth dataset and baseline evaluations for intrinsic image algorithms Roger Grosse Micah K. Johnson Edward H. Adelson William T. Freeman Massachusetts Institute of Technology Cambridge, MA 02139
Abstract. 1. Introduction
 Recovery of Chromaticity Image Free from Shadows via Illumination Invariance Mark S. Drew School of Computing Science Simon Fraser University Vancouver, British Columbia Canada V5A 1S6 mark@cs.sfu.ca Graham
Recovery of Chromaticity Image Free from Shadows via Illumination Invariance Mark S. Drew School of Computing Science Simon Fraser University Vancouver, British Columbia Canada V5A 1S6 mark@cs.sfu.ca Graham
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Recollection. Models Pixels. Model transformation Viewport transformation Clipping Rasterization Texturing + Lights & shadows
 Recollection Models Pixels Model transformation Viewport transformation Clipping Rasterization Texturing + Lights & shadows Can be computed in different stages 1 So far we came to Geometry model 3 Surface
Recollection Models Pixels Model transformation Viewport transformation Clipping Rasterization Texturing + Lights & shadows Can be computed in different stages 1 So far we came to Geometry model 3 Surface
Shadow detection and removal from a single image
 Shadow detection and removal from a single image Corina BLAJOVICI, Babes-Bolyai University, Romania Peter Jozsef KISS, University of Pannonia, Hungary Zoltan BONUS, Obuda University, Hungary Laszlo VARGA,
Shadow detection and removal from a single image Corina BLAJOVICI, Babes-Bolyai University, Romania Peter Jozsef KISS, University of Pannonia, Hungary Zoltan BONUS, Obuda University, Hungary Laszlo VARGA,
Radiance. Pixels measure radiance. This pixel Measures radiance along this ray
 Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
CS 5625 Lec 2: Shading Models
 CS 5625 Lec 2: Shading Models Kavita Bala Spring 2013 Shading Models Chapter 7 Next few weeks Textures Graphics Pipeline Light Emission To compute images What are the light sources? Light Propagation Fog/Clear?
CS 5625 Lec 2: Shading Models Kavita Bala Spring 2013 Shading Models Chapter 7 Next few weeks Textures Graphics Pipeline Light Emission To compute images What are the light sources? Light Propagation Fog/Clear?
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Targil 10 : Why Mosaic? Why is this a challenge? Exposure differences Scene illumination Miss-registration Moving objects
 Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 5 x 35 Targil : Panoramas - Stitching and Blending Some slides from Alexei Efros 2 Slide from Brown & Lowe Why Mosaic? Are you getting
Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 5 x 35 Targil : Panoramas - Stitching and Blending Some slides from Alexei Efros 2 Slide from Brown & Lowe Why Mosaic? Are you getting
Image Blending and Compositing NASA
 Image Blending and Compositing NASA CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016 Image Compositing Compositing Procedure 1. Extract Sprites (e.g using Intelligent
Image Blending and Compositing NASA CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016 Image Compositing Compositing Procedure 1. Extract Sprites (e.g using Intelligent
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
Robust Tracking and Stereo Matching under Variable Illumination
 Robust Tracking and Stereo Matching under Variable Illumination Jingdan Zhang Leonard McMillan UNC Chapel Hill Chapel Hill, NC 27599 {zhangjd,mcmillan}@cs.unc.edu Jingyi Yu University of Delaware Newark,
Robust Tracking and Stereo Matching under Variable Illumination Jingdan Zhang Leonard McMillan UNC Chapel Hill Chapel Hill, NC 27599 {zhangjd,mcmillan}@cs.unc.edu Jingyi Yu University of Delaware Newark,
Color. making some recognition problems easy. is 400nm (blue) to 700 nm (red) more; ex. X-rays, infrared, radio waves. n Used heavily in human vision
 to 700 nm (red) more; ex. X-rays, infrared, radio waves. n Used heavily in human vision") Color n Used heavily in human vision n Color is a pixel property, making some recognition problems easy n Visible spectrum for humans is 400nm (blue) to 700 nm (red) n Machines can see much more; ex. X-rays,
Color n Used heavily in human vision n Color is a pixel property, making some recognition problems easy n Visible spectrum for humans is 400nm (blue) to 700 nm (red) n Machines can see much more; ex. X-rays,
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Color Constancy from Hyper-Spectral Data
 Color Constancy from Hyper-Spectral Data Th. Gevers, H. M. G. Stokman, J. van de Weijer Faculty of Science, University of Amsterdam, The Netherlands fgevers, stokman, joostwg@wins.uva.nl Abstract This
Color Constancy from Hyper-Spectral Data Th. Gevers, H. M. G. Stokman, J. van de Weijer Faculty of Science, University of Amsterdam, The Netherlands fgevers, stokman, joostwg@wins.uva.nl Abstract This
Colour Reading: Chapter 6. Black body radiators
 Colour Reading: Chapter 6 Light is produced in different amounts at different wavelengths by each light source Light is differentially reflected at each wavelength, which gives objects their natural colours
Colour Reading: Chapter 6 Light is produced in different amounts at different wavelengths by each light source Light is differentially reflected at each wavelength, which gives objects their natural colours
Overview. Video. Overview 4/7/2008. Optical flow. Why estimate motion? Motion estimation: Optical flow. Motion Magnification Colorization.
 Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Multispectral Image Invariant to Illumination Colour, Strength, and Shading
 Digital Photography VII, San Francisco, 23-27 January 2011. http://www.cs.sfu.ca/~mark/ftp/ei2011/ei2011.pdf Multispectral Image Invariant to Illumination Colour, Strength, and Shading Mark S. Drew and
Digital Photography VII, San Francisco, 23-27 January 2011. http://www.cs.sfu.ca/~mark/ftp/ei2011/ei2011.pdf Multispectral Image Invariant to Illumination Colour, Strength, and Shading Mark S. Drew and
Supplementary Material: Specular Highlight Removal in Facial Images
 Supplementary Material: Specular Highlight Removal in Facial Images Chen Li 1 Stephen Lin 2 Kun Zhou 1 Katsushi Ikeuchi 2 1 State Key Lab of CAD&CG, Zhejiang University 2 Microsoft Research 1. Computation
Supplementary Material: Specular Highlight Removal in Facial Images Chen Li 1 Stephen Lin 2 Kun Zhou 1 Katsushi Ikeuchi 2 1 State Key Lab of CAD&CG, Zhejiang University 2 Microsoft Research 1. Computation
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Pop Quiz 1 [10 mins]
![Pop Quiz 1 [10 mins]](/thumbs/77/76612064.jpg "Pop Quiz 1 [10 mins]") Pop Quiz 1 [10 mins] 1. An audio signal makes 250 cycles in its span (or has a frequency of 250Hz). How many samples do you need, at a minimum, to sample it correctly? [1] 2. If the number of bits is reduced,
Pop Quiz 1 [10 mins] 1. An audio signal makes 250 cycles in its span (or has a frequency of 250Hz). How many samples do you need, at a minimum, to sample it correctly? [1] 2. If the number of bits is reduced,
Warping, Morphing and Mosaics
 Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
Photometric stereo. Recovering the surface f(x,y) Three Source Photometric stereo: Step1. Reflectance Map of Lambertian Surface
 Three Source Photometric stereo: Step1. Reflectance Map of Lambertian Surface") Photometric stereo Illumination Cones and Uncalibrated Photometric Stereo Single viewpoint, multiple images under different lighting. 1. Arbitrary known BRDF, known lighting 2. Lambertian BRDF, known lighting
Photometric stereo Illumination Cones and Uncalibrated Photometric Stereo Single viewpoint, multiple images under different lighting. 1. Arbitrary known BRDF, known lighting 2. Lambertian BRDF, known lighting
Illumination Decomposition for Material Editing with Consistent Interreflections
 Illumination Decomposition for Material Editing with Consistent Interreflections Robert Carroll Maneesh Agrawala Ravi Ramamoorthi University of California, Berkeley Presented by Wesley Willett Computational
Illumination Decomposition for Material Editing with Consistent Interreflections Robert Carroll Maneesh Agrawala Ravi Ramamoorthi University of California, Berkeley Presented by Wesley Willett Computational
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
Automatic Colorization of Grayscale Images
 Automatic Colorization of Grayscale Images Austin Sousa Rasoul Kabirzadeh Patrick Blaes Department of Electrical Engineering, Stanford University 1 Introduction ere exists a wealth of photographic images,
Automatic Colorization of Grayscale Images Austin Sousa Rasoul Kabirzadeh Patrick Blaes Department of Electrical Engineering, Stanford University 1 Introduction ere exists a wealth of photographic images,
Specular Reflection Separation using Dark Channel Prior
 2013 IEEE Conference on Computer Vision and Pattern Recognition Specular Reflection Separation using Dark Channel Prior Hyeongwoo Kim KAIST hyeongwoo.kim@kaist.ac.kr Hailin Jin Adobe Research hljin@adobe.com
2013 IEEE Conference on Computer Vision and Pattern Recognition Specular Reflection Separation using Dark Channel Prior Hyeongwoo Kim KAIST hyeongwoo.kim@kaist.ac.kr Hailin Jin Adobe Research hljin@adobe.com
Texture. Texture. 2) Synthesis. Objectives: 1) Discrimination/Analysis
 Synthesis. Objectives: 1) Discrimination/Analysis") Texture Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Key issue: How do we represent texture? Topics: Texture segmentation Texture-based matching Texture
Texture Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Key issue: How do we represent texture? Topics: Texture segmentation Texture-based matching Texture
Dealing with Multi-Scale Depth Changes and Motion in Depth Edge Detection
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Dealing with Multi-Scale Depth Changes and Motion in Depth Edge Detection Rogerio Feris, Matthew Turk, Ramesh Raskar TR2006-110 October 2006
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Dealing with Multi-Scale Depth Changes and Motion in Depth Edge Detection Rogerio Feris, Matthew Turk, Ramesh Raskar TR2006-110 October 2006
What is an Image? Image Acquisition. Image Processing - Lesson 2. An image is a projection of a 3D scene into a 2D projection plane.
 mage Processing - Lesson 2 mage Acquisition mage Characteristics mage Acquisition mage Digitization Sampling Quantization mage Histogram What is an mage? An image is a projection of a 3D scene into a 2D
mage Processing - Lesson 2 mage Acquisition mage Characteristics mage Acquisition mage Digitization Sampling Quantization mage Histogram What is an mage? An image is a projection of a 3D scene into a 2D
General Principles of 3D Image Analysis
 General Principles of 3D Image Analysis high-level interpretations objects scene elements Extraction of 3D information from an image (sequence) is important for - vision in general (= scene reconstruction)
General Principles of 3D Image Analysis high-level interpretations objects scene elements Extraction of 3D information from an image (sequence) is important for - vision in general (= scene reconstruction)
Automatic Photo Popup
 Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Learning local evidence for shading and reflectance
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Learning local evidence for shading and reflectance Matt Bell, William T. Freeman TR2001-04 December 2001 Abstract A fundamental, unsolved
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Learning local evidence for shading and reflectance Matt Bell, William T. Freeman TR2001-04 December 2001 Abstract A fundamental, unsolved
Lecture 16: Computer Vision
 CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
The Photometry of Intrinsic Images
 The Photometry of Intrinsic Images Marc Serra1, Olivier Penacchio1,3, Robert Benavente1, Maria Vanrell1, Dimitris Samaras2 1 Computer Vision Center / Computer Science Dept., Universitat Auto noma de Barcelona
The Photometry of Intrinsic Images Marc Serra1, Olivier Penacchio1,3, Robert Benavente1, Maria Vanrell1, Dimitris Samaras2 1 Computer Vision Center / Computer Science Dept., Universitat Auto noma de Barcelona
Panoramic Image Stitching
 Mcgill University Panoramic Image Stitching by Kai Wang Pengbo Li A report submitted in fulfillment for the COMP 558 Final project in the Faculty of Computer Science April 2013 Mcgill University Abstract
Mcgill University Panoramic Image Stitching by Kai Wang Pengbo Li A report submitted in fulfillment for the COMP 558 Final project in the Faculty of Computer Science April 2013 Mcgill University Abstract
Full-Colour, Computational Ghost Video. Miles Padgett Kelvin Chair of Natural Philosophy
 Full-Colour, Computational Ghost Video Miles Padgett Kelvin Chair of Natural Philosophy A Quantum Ghost Imager! Generate random photon pairs, illuminate both object and camera SPDC CCD Identical copies
Full-Colour, Computational Ghost Video Miles Padgett Kelvin Chair of Natural Philosophy A Quantum Ghost Imager! Generate random photon pairs, illuminate both object and camera SPDC CCD Identical copies
Textureless Layers CMU-RI-TR Qifa Ke, Simon Baker, and Takeo Kanade
 Textureless Layers CMU-RI-TR-04-17 Qifa Ke, Simon Baker, and Takeo Kanade The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA 15213 Abstract Layers are one of the most well
Textureless Layers CMU-RI-TR-04-17 Qifa Ke, Simon Baker, and Takeo Kanade The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA 15213 Abstract Layers are one of the most well
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
Color and Shading. Color. Shapiro and Stockman, Chapter 6. Color and Machine Vision. Color and Perception
 Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Estimation of Reflection Properties of Silk Textile with Multi-band Camera
 Estimation of Reflection Properties of Silk Textile with Multi-band Camera Kosuke MOCHIZUKI*, Norihiro TANAKA**, Hideaki MORIKAWA* *Graduate School of Shinshu University, 12st116a@shinshu-u.ac.jp ** Faculty
Estimation of Reflection Properties of Silk Textile with Multi-band Camera Kosuke MOCHIZUKI*, Norihiro TANAKA**, Hideaki MORIKAWA* *Graduate School of Shinshu University, 12st116a@shinshu-u.ac.jp ** Faculty
w Foley, Section16.1 Reading
 Shading w Foley, Section16.1 Reading Introduction So far, we ve talked exclusively about geometry. w What is the shape of an object? w How do I place it in a virtual 3D space? w How do I know which pixels
Shading w Foley, Section16.1 Reading Introduction So far, we ve talked exclusively about geometry. w What is the shape of an object? w How do I place it in a virtual 3D space? w How do I know which pixels
Photometric Processing
 Photometric Processing 1 Histogram Probability distribution of the different grays in an image 2 Contrast Enhancement Limited gray levels are used Hence, low contrast Enhance contrast 3 Histogram Stretching
Photometric Processing 1 Histogram Probability distribution of the different grays in an image 2 Contrast Enhancement Limited gray levels are used Hence, low contrast Enhance contrast 3 Histogram Stretching
ams AG TAOS Inc. is now The technical content of this TAOS document is still valid. Contact information:
 TAOS Inc. is now ams AG The technical content of this TAOS document is still valid. Contact information: Headquarters: ams AG Tobelbader Strasse 30 8141 Premstaetten, Austria Tel: +43 (0) 3136 500 0 e-mail:
TAOS Inc. is now ams AG The technical content of this TAOS document is still valid. Contact information: Headquarters: ams AG Tobelbader Strasse 30 8141 Premstaetten, Austria Tel: +43 (0) 3136 500 0 e-mail:
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows
 ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Rendering: Reality. Eye acts as pinhole camera. Photons from light hit objects
 Basic Ray Tracing Rendering: Reality Eye acts as pinhole camera Photons from light hit objects Rendering: Reality Eye acts as pinhole camera Photons from light hit objects Rendering: Reality Eye acts as
Basic Ray Tracing Rendering: Reality Eye acts as pinhole camera Photons from light hit objects Rendering: Reality Eye acts as pinhole camera Photons from light hit objects Rendering: Reality Eye acts as
Recap. DoF Constraint Solver. translation. affine. homography. 3D rotation
 Image Blending Recap DoF Constraint Solver translation affine homography 3D rotation Recap DoF Constraint Solver translation 2 affine homography 3D rotation Recap DoF Constraint Solver translation 2 affine
Image Blending Recap DoF Constraint Solver translation affine homography 3D rotation Recap DoF Constraint Solver translation 2 affine homography 3D rotation Recap DoF Constraint Solver translation 2 affine
Optical flow and tracking
 EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
A Novel Approach for Shadow Removal Based on Intensity Surface Approximation
 A Novel Approach for Shadow Removal Based on Intensity Surface Approximation Eli Arbel THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE MASTER DEGREE University of Haifa Faculty of Social
A Novel Approach for Shadow Removal Based on Intensity Surface Approximation Eli Arbel THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE MASTER DEGREE University of Haifa Faculty of Social
Image Acquisition + Histograms
 Image Processing - Lesson 1 Image Acquisition + Histograms Image Characteristics Image Acquisition Image Digitization Sampling Quantization Histograms Histogram Equalization What is an Image? An image
Image Processing - Lesson 1 Image Acquisition + Histograms Image Characteristics Image Acquisition Image Digitization Sampling Quantization Histograms Histogram Equalization What is an Image? An image
DECOMPOSING and editing the illumination of a photograph
 IEEE TRANSACTIONS ON IMAGE PROCESSING, 2017 1 Illumination Decomposition for Photograph with Multiple Light Sources Ling Zhang, Qingan Yan, Zheng Liu, Hua Zou, and Chunxia Xiao, Member, IEEE Abstract Illumination
IEEE TRANSACTIONS ON IMAGE PROCESSING, 2017 1 Illumination Decomposition for Photograph with Multiple Light Sources Ling Zhang, Qingan Yan, Zheng Liu, Hua Zou, and Chunxia Xiao, Member, IEEE Abstract Illumination
dependent intensity function - the spectral distribution function (SPD) E( ). The surface reflectance is the proportion of incident light which is ref
 E( ). The surface reflectance is the proportion of incident light which is ref") Object-Based Illumination Classification H. Z. Hel-Or B. A. Wandell Dept. of Computer Science Haifa University Haifa 395, Israel Dept. Of Psychology Stanford University Stanford, CA 9435, USA Abstract
Object-Based Illumination Classification H. Z. Hel-Or B. A. Wandell Dept. of Computer Science Haifa University Haifa 395, Israel Dept. Of Psychology Stanford University Stanford, CA 9435, USA Abstract
Announcements. Lighting. Camera s sensor. HW1 has been posted See links on web page for readings on color. Intro Computer Vision.
 Announcements HW1 has been posted See links on web page for readings on color. Introduction to Computer Vision CSE 152 Lecture 6 Deviations from the lens model Deviations from this ideal are aberrations
Announcements HW1 has been posted See links on web page for readings on color. Introduction to Computer Vision CSE 152 Lecture 6 Deviations from the lens model Deviations from this ideal are aberrations
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Lecture 17: Recursive Ray Tracing. Where is the way where light dwelleth? Job 38:19
 Lecture 17: Recursive Ray Tracing Where is the way where light dwelleth? Job 38:19 1. Raster Graphics Typical graphics terminals today are raster displays. A raster display renders a picture scan line
Lecture 17: Recursive Ray Tracing Where is the way where light dwelleth? Job 38:19 1. Raster Graphics Typical graphics terminals today are raster displays. A raster display renders a picture scan line
Understanding Variability
 Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
CS Illumination and Shading. Slide 1
 CS 112 - Illumination and Shading Slide 1 Illumination/Lighting Interaction between light and surfaces Physics of optics and thermal radiation Very complex: Light bounces off several surface before reaching
CS 112 - Illumination and Shading Slide 1 Illumination/Lighting Interaction between light and surfaces Physics of optics and thermal radiation Very complex: Light bounces off several surface before reaching
Video Alignment. Literature Survey. Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin
 Literature Survey Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin Omer Shakil Abstract This literature survey compares various methods
Literature Survey Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin Omer Shakil Abstract This literature survey compares various methods
Overview of Active Vision Techniques
 SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
Motion. 1 Introduction. 2 Optical Flow. Sohaib A Khan. 2.1 Brightness Constancy Equation
 Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Illumination Estimation from Shadow Borders
 Illumination Estimation from Shadow Borders Alexandros Panagopoulos, Tomás F. Yago Vicente, Dimitris Samaras Stony Brook University Stony Brook, NY, USA {apanagop, tyagovicente, samaras}@cs.stonybrook.edu
Illumination Estimation from Shadow Borders Alexandros Panagopoulos, Tomás F. Yago Vicente, Dimitris Samaras Stony Brook University Stony Brook, NY, USA {apanagop, tyagovicente, samaras}@cs.stonybrook.edu
A Simple Vision System
 Chapter 1 A Simple Vision System 1.1 Introduction In 1966, Seymour Papert wrote a proposal for building a vision system as a summer project [4]. The abstract of the proposal starts stating a simple goal:
Chapter 1 A Simple Vision System 1.1 Introduction In 1966, Seymour Papert wrote a proposal for building a vision system as a summer project [4]. The abstract of the proposal starts stating a simple goal:
Estimation of Intrinsic Image Sequences from Image+Depth Video
 Estimation of Intrinsic Image Sequences from Image+Depth Video Kyong Joon Lee 1,2 Qi Zhao 3 Xin Tong 1 Minmin Gong 1 Shahram Izadi 4 Sang Uk Lee 2 Ping Tan 5 Stephen Lin 1 1 Microsoft Research Asia 2 Seoul
Estimation of Intrinsic Image Sequences from Image+Depth Video Kyong Joon Lee 1,2 Qi Zhao 3 Xin Tong 1 Minmin Gong 1 Shahram Izadi 4 Sang Uk Lee 2 Ping Tan 5 Stephen Lin 1 1 Microsoft Research Asia 2 Seoul
Question 2: Linear algebra and transformations matrices rotation vectors linear transformation T=U*D*VT
 You must answer all questions. For full credit, an answer must be both correct and well-presented (clear and concise). If you feel a question is ambiguous, state any assumptions that you need to make.
You must answer all questions. For full credit, an answer must be both correct and well-presented (clear and concise). If you feel a question is ambiguous, state any assumptions that you need to make.
CENG 477 Introduction to Computer Graphics. Ray Tracing: Shading
 CENG 477 Introduction to Computer Graphics Ray Tracing: Shading Last Week Until now we learned: How to create the primary rays from the given camera and image plane parameters How to intersect these rays
CENG 477 Introduction to Computer Graphics Ray Tracing: Shading Last Week Until now we learned: How to create the primary rays from the given camera and image plane parameters How to intersect these rays
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Constructing a 3D Object Model from Multiple Visual Features
 Constructing a 3D Object Model from Multiple Visual Features Jiang Yu Zheng Faculty of Computer Science and Systems Engineering Kyushu Institute of Technology Iizuka, Fukuoka 820, Japan Abstract This work
Constructing a 3D Object Model from Multiple Visual Features Jiang Yu Zheng Faculty of Computer Science and Systems Engineering Kyushu Institute of Technology Iizuka, Fukuoka 820, Japan Abstract This work
Lighting. Figure 10.1
 We have learned to build three-dimensional graphical models and to display them. However, if you render one of our models, you might be disappointed to see images that look flat and thus fail to show the
We have learned to build three-dimensional graphical models and to display them. However, if you render one of our models, you might be disappointed to see images that look flat and thus fail to show the
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein. Lecture 23: Photometric Stereo
 CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
CS201 Computer Vision Lect 4 - Image Formation
 CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
Lucas-Kanade Motion Estimation. Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides.
 Lucas-Kanade Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Lucas-Kanade Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Simpler Soft Shadow Mapping Lee Salzman September 20, 2007
 Simpler Soft Shadow Mapping Lee Salzman September 20, 2007 Lightmaps, as do other precomputed lighting methods, provide an efficient and pleasing solution for lighting and shadowing of relatively static
Simpler Soft Shadow Mapping Lee Salzman September 20, 2007 Lightmaps, as do other precomputed lighting methods, provide an efficient and pleasing solution for lighting and shadowing of relatively static