Introduction to Mobile Robotics. SLAM: Simultaneous Localization and Mapping
|
|
|
- Dulcie Baker
- 6 years ago
- Views:
Transcription
1 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
2 The SLAM Problem SLAM is the process by which a robot builds a map of the environment and, at the same time, uses this map to compute its location Localization: inferring location given a map Mapping: inferring a map given a location SLAM: learning a map and locating the robot simultaneously 2
3 The SLAM Problem SLAM is a chicken-or-egg problem: A map is needed for localizing a robot A good pose estimate is needed to build a map hus, SLAM is regarded as a hard problem in robotics 3
4 The SLAM Problem SLAM is considered one of the most fundamental problems for robots to become truly autonomous. A variety of different approaches to address the SLAM problem have been presented Probabilistic methods rule! History of SLAM dates back to the mid-eighties (the stone-age of robotics) 4

5 The SLAM Problem Given: The robot s controls Relative observations Wanted: Map of features Path of the robot 5

6 The SLAM Problem Absolute robot pose Absolute landmark positions But only relative measurements of landmarks 6
7 Mapping with Raw Odometry Video.. 7
8 SLAM Applications SLAM is central to a range of indoor, outdoor, in-air and underwater applications for both manned and autonomous vehicles. Examples: At home: vacuum cleaner, lawn mower Air: surveillance with unmanned air vehicles Underwater: reef monitoring Underground: exploration of abandoned mines Space: terrain mapping for localization 8
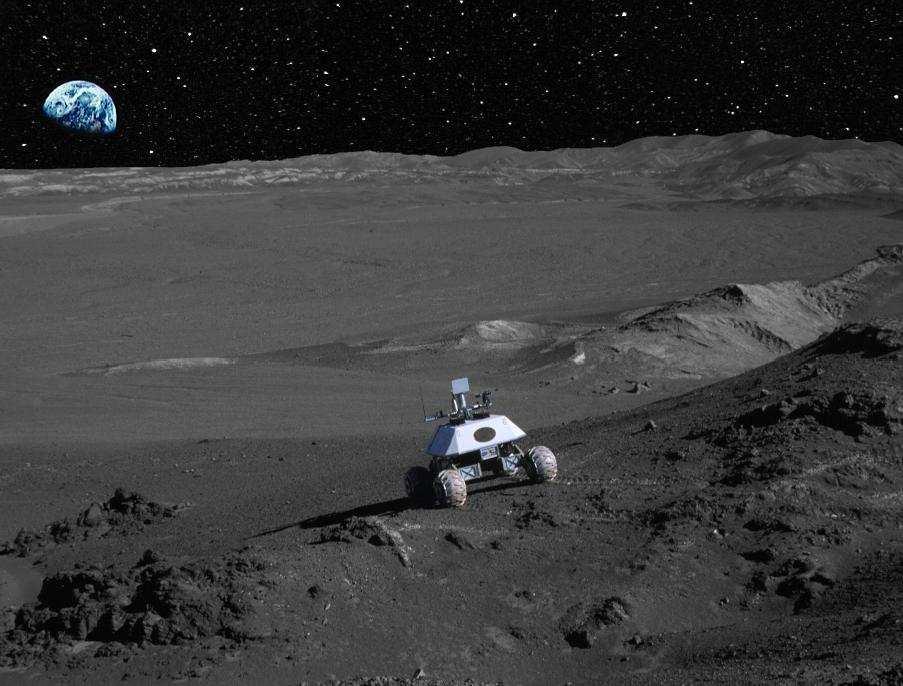


9 SLAM Applications Indoors Undersea Space Underground 9


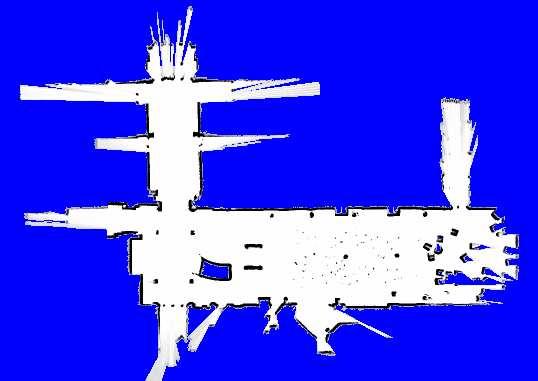
10 Map Representations Examples: Subway map, city map, landmark-based map Maps are topological and/or metric models of the environment 10



![Haehnel, 01; ]](/docs-images/74/71360557/images/11-3.jpg "Landmark-based [Leonard et")

11 Map Representations Grid maps or scans, 2d, 3d [Lu & Milios, 97; Gutmann, 98: Thrun 98; Burgard, 99; Konolige & Gutmann, 00; Thrun, 00; Arras, 99; Haehnel, 01; ] Landmark-based [Leonard et al., 98; Castelanos et al., 99: Dissanayake et al., 2001; Montemerlo et al., 2002; 11
12 Why is SLAM a hard problem? 1. Robot path and map are both unknown 2. Errors in map and pose estimates correlated 12
13 Why is SLAM a hard problem? Robot pose uncertainty In the real world, the mapping between observations and landmarks is unknown (origin uncertainty of measurements) Data Association: picking wrong data associations can have catastrophic consequences (divergence) 13
14 SLAM: Simultaneous Localization And Mapping Full SLAM: p(x 0:t,m z 1:t,u 1:t ) Estimates entire path and map! Online SLAM: p(x t,m z 1:t,u 1:t ) = K p(x 1:t,m z 1:t,u 1:t ) dx 1 dx 2...dx t 1 Integrations (marginalization) typically done recursively, one at a time Estimates most recent pose and map! 14
")
15 Graphical Model of Full SLAM p( x : t, m z1: t, u1 : 1 t ) 15
16 Graphical Model of Online SLAM p ( xt, m z1 : t, u1: t ) = Κ p( x1: t, m z1: t, u1: t ) dx1 dx2... dxt 1 16

17 Graphical Model: Models Motion model Observation model 17
18 Remember? KF Algorithm 1. Algorithm Kalman_filter(µ t-1, Σ t-1, u t, z t ): 2. Prediction: 3. µ t = A tµ t 1 + Btut T 4. Σt = A Σ A + R t 1 5. Correction: T T 6. Kt = ΣtCt ( Ct ΣtCt + Qt ) 7. µ t = µ t + K t ( zt Ct µ t ) 8. Σ = ( I K C ) Σt t 9. Return µ t, Σ t t t t t t 1 18
19 EKF SLAM: State representation Localization 3x1 pose vector 3x3 cov. matrix SLAM Landmarks are simply added to the state. Growing state vector and covariance matrix! 19
20 EKF SLAM: State representation Map with n landmarks: (3+2n)-dimensional Gaussian Bel(x t,m t ) = x y θ l 1 l 2 M l N, 2 σ x σ xy σ xθ σ xl1 σ xl2 L σ xln 2 σ xy σ y σ yθ σ yl1 σ yl2 L σ yln 2 σ xθ σ yθ σ θ σ θl1 σ θl2 L σ θln 2 σ xl1 σ yl1 σ θl1 σ l1 σ l1 l 2 L σ l1 l N 2 σ xl2 σ yl2 σ θl2 σ l1 l 2 σ l2 L σ l2 l N M M M M M O M 2 σ xln σ yln σ θln σ l1 l N σ l2 l N L σ ln Can handle hundreds of dimensions 20
21 EKF SLAM: Building The Map State Prediction Odometry: Robot-landmark crosscovariance prediction: (skipping time index k) 21
22 EKF SLAM: Building The Map Measurement Prediction Global-to-local frame transform h 22
23 EKF SLAM: Building The Map Observation (x,y)-point landmarks 23
24 EKF SLAM: Building The Map Data Association Associates predicted measurements with observation? (Gating) 24
25 EKF SLAM: Building The Map Filter Update The usual Kalman filter expressions 25
26 EKF SLAM: Building The Map Integrating New Landmarks State augmented by landmark-to-landmark cross-covariance: 26
27 EKF SLAM Map Correlation matrix 27

28 EKF SLAM Map Correlation matrix 28

29 EKF SLAM Map Correlation matrix 29
30 KF-SLAM Properties (Linear Case) The determinant of any sub-matrix of the map covariance matrix decreases monotonically as successive observations are made When a new landmark is initialized, its uncertainty is maximal Landmark uncertainty decreases monotonically with each new observation [Dissanayake et al., 2001] 30

31 KF-SLAM Properties (Linear Case) In the limit, the landmark estimates become fully correlated [Dissanayake et al., 2001] 31
32 KF-SLAM Properties (Linear Case) In the limit, the covariance associated with any single landmark location estimate is determined only by the initial covariance in the vehicle location estimate. [Dissanayake et al., 2001] 32

33 Victoria Park Data Set [courtesy by E. Nebot] 33

34 Victoria Park Data Set Vehicle [courtesy by E. Nebot] 34

35 Data Acquisition [courtesy by E. Nebot] 35
36 Estimated Trajectory [courtesy by E. Nebot] 36

37 EKF SLAM Application [courtesy by J. Leonard] 37
38 EKF SLAM Application odometry estimated trajectory [courtesy by John Leonard] 38
39 SLAM Techniques for Generating Consistent Maps EKF SLAM FastSLAM (PF) Network-Based SLAM Hybrid Approaches (combination of NW+PF, NW+EKF) Topological SLAM (mainly place recognition) Scan Matching / Visual Odometry (only locally consistent maps) 39
40 EKF-SLAM: Complexity Cost per step: quadratic in n, the number of landmarks: O(n 2 ) Total cost to build a map with n landmarks: O(n 3 ) Memory: O(n 2 ) Approaches exist that make EKF-SLAM amortized O(n) / O(n 2 ) / O(n 2 ) D&C SLAM [Paz et al., 2006] 40
41 EKF-SLAM: Summary Convergence for linear case! Can diverge if nonlinearities are large. And reality is nonlinear... Has been applied successfully in largescale environments Approximations reduce the computational complexity 41
42 Data Association for SLAM Interpretation tree 42
43 Data Association for SLAM Env. Dyn. 43
44 Data Association for SLAM Geometric Constraints Location independent constraints Unary constraint: intrinsic property of feature e.g. type, color, size Binary constraint: relative measure between features e.g. relative position, angle Location dependent constraints Rigidity constraint: "is the feature where I expect it given my position?" Visibility constraint: "is the feature visible from my position?" Extension constraint: "do the features overlap at my position?" All decisions on a significance level α 44
45 Data Association for SLAM Interpretation Tree [Grimson 1987], [Drumheller 1987], [Castellanos 1996], [Lim 2000] Algorithm backtracking depth-first recursive uses geometric constraints exponential complexity absence of feature: no info. presence of feature: info. perhaps 45
46 Data Association for SLAM Pygmalion a = 0.95, p = 2 46
47 Data Association for SLAM Pygmalion a = 0.95, p = 3 47
48 Data Association for SLAM Pygmalion t exe : 633 ms PowerPC at 300 MHz a = 0.95, p = 4 a = 0.95, p = 5 48
49 Approximations for SLAM Local submaps [Leonard et al.99, Bosse et al. 02, Newman et al. 03] Sparse links (correlations) [Lu & Milios 97, Guivant & Nebot 01] Sparse extended information filters [Frese et al. 01, Thrun et al. 02] Thin junction tree filters [Paskin 03] Rao-Blackwellisation (FastSLAM) [Murphy 99, Montemerlo et al. 02, Eliazar et al. 03, Haehnel et al. 03] 49
What is the SLAM problem?
 SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM
 Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
Announcements. Recap Landmark based SLAM. Types of SLAM-Problems. Occupancy Grid Maps. Grid-based SLAM. Page 1. CS 287: Advanced Robotics Fall 2009
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Simultaneous Localization and Mapping! SLAM
 Overview Simultaneous Localization and Mapping! SLAM What is SLAM? Qualifying Oral Examination Why do SLAM? Who, When, Where?!! A very brief literature overview Andrew Hogue hogue@cs.yorku.ca How has the
Overview Simultaneous Localization and Mapping! SLAM What is SLAM? Qualifying Oral Examination Why do SLAM? Who, When, Where?!! A very brief literature overview Andrew Hogue hogue@cs.yorku.ca How has the
Final project: 45% of the grade, 10% presentation, 35% write-up. Presentations: in lecture Dec 1 and schedule:
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Particle Filter in Brief. Robot Mapping. FastSLAM Feature-based SLAM with Particle Filters. Particle Representation. Particle Filter Algorithm
 Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
SLAM: Robotic Simultaneous Location and Mapping
 SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
ME 456: Probabilistic Robotics
 ME 456: Probabilistic Robotics Week 5, Lecture 2 SLAM Reading: Chapters 10,13 HW 2 due Oct 30, 11:59 PM Introduction In state esemaeon and Bayes filter lectures, we showed how to find robot s pose based
ME 456: Probabilistic Robotics Week 5, Lecture 2 SLAM Reading: Chapters 10,13 HW 2 due Oct 30, 11:59 PM Introduction In state esemaeon and Bayes filter lectures, we showed how to find robot s pose based
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Introduction to Mobile Robotics SLAM Grid-based FastSLAM. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
L12. EKF-SLAM: PART II. NA568 Mobile Robotics: Methods & Algorithms
 L12. EKF-SLAM: PART II NA568 Mobile Robotics: Methods & Algorithms Today s Lecture Feature-based EKF-SLAM Review Data Association Configuration Space Incremental ML (i.e., Nearest Neighbor) Joint Compatibility
L12. EKF-SLAM: PART II NA568 Mobile Robotics: Methods & Algorithms Today s Lecture Feature-based EKF-SLAM Review Data Association Configuration Space Incremental ML (i.e., Nearest Neighbor) Joint Compatibility
Robotics. Lecture 7: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
A Genetic Algorithm for Simultaneous Localization and Mapping
 A Genetic Algorithm for Simultaneous Localization and Mapping Tom Duckett Centre for Applied Autonomous Sensor Systems Dept. of Technology, Örebro University SE-70182 Örebro, Sweden http://www.aass.oru.se
A Genetic Algorithm for Simultaneous Localization and Mapping Tom Duckett Centre for Applied Autonomous Sensor Systems Dept. of Technology, Örebro University SE-70182 Örebro, Sweden http://www.aass.oru.se
Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT. Full Paper
 USING DIFFERENTIAL DRIVE MOBILE ROBOT. Full Paper") Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT Norhidayah Mohamad Yatim a,b, Norlida Buniyamin a a Faculty of Engineering, Universiti
Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT Norhidayah Mohamad Yatim a,b, Norlida Buniyamin a a Faculty of Engineering, Universiti
Robotics. Lecture 8: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 8: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 8: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Improving Simultaneous Mapping and Localization in 3D Using Global Constraints
 Improving Simultaneous Mapping and Localization in 3D Using Global Constraints Rudolph Triebel and Wolfram Burgard Department of Computer Science, University of Freiburg George-Koehler-Allee 79, 79108
Improving Simultaneous Mapping and Localization in 3D Using Global Constraints Rudolph Triebel and Wolfram Burgard Department of Computer Science, University of Freiburg George-Koehler-Allee 79, 79108
Gaussian Multi-Robot SLAM
 Submitted to NIPS*2003 Gaussian Multi-Robot SLAM Yufeng Liu and Sebastian Thrun School of Computer Science Carnegie Mellon University Abstract We present an algorithm for the multi-robot simultaneous localization
Submitted to NIPS*2003 Gaussian Multi-Robot SLAM Yufeng Liu and Sebastian Thrun School of Computer Science Carnegie Mellon University Abstract We present an algorithm for the multi-robot simultaneous localization
D-SLAM: Decoupled Localization and Mapping for Autonomous Robots
 D-SLAM: Decoupled Localization and Mapping for Autonomous Robots Zhan Wang, Shoudong Huang, and Gamini Dissanayake ARC Centre of Excellence for Autonomous Systems (CAS), Faculty of Engineering, University
D-SLAM: Decoupled Localization and Mapping for Autonomous Robots Zhan Wang, Shoudong Huang, and Gamini Dissanayake ARC Centre of Excellence for Autonomous Systems (CAS), Faculty of Engineering, University
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Kaijen Hsiao. Part A: Topics of Fascination
 Kaijen Hsiao Part A: Topics of Fascination 1) I am primarily interested in SLAM. I plan to do my project on an application of SLAM, and thus I am interested not only in the method we learned about in class,
Kaijen Hsiao Part A: Topics of Fascination 1) I am primarily interested in SLAM. I plan to do my project on an application of SLAM, and thus I am interested not only in the method we learned about in class,
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
Fast and Accurate SLAM with Rao-Blackwellized Particle Filters
 Fast and Accurate SLAM with Rao-Blackwellized Particle Filters Giorgio Grisetti a,b Gian Diego Tipaldi b Cyrill Stachniss c,a Wolfram Burgard a Daniele Nardi b a University of Freiburg, Department of Computer
Fast and Accurate SLAM with Rao-Blackwellized Particle Filters Giorgio Grisetti a,b Gian Diego Tipaldi b Cyrill Stachniss c,a Wolfram Burgard a Daniele Nardi b a University of Freiburg, Department of Computer
HybridSLAM: Combining FastSLAM and EKF-SLAM for reliable mapping
 HybridSLAM: Combining FastSLAM and EKF-SLAM for reliable mapping Alex Brooks 1 and Tim Bailey 1 Australian Centre for Field Robotics, University of Sydney {a.brooks,t.bailey}@acfr.usyd.edu.au Abstract:
HybridSLAM: Combining FastSLAM and EKF-SLAM for reliable mapping Alex Brooks 1 and Tim Bailey 1 Australian Centre for Field Robotics, University of Sydney {a.brooks,t.bailey}@acfr.usyd.edu.au Abstract:
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
TORO - Efficient Constraint Network Optimization for SLAM
 TORO - Efficient Constraint Network Optimization for SLAM Cyrill Stachniss Joint work with Giorgio Grisetti and Wolfram Burgard Special thanks to and partial slide courtesy of: Diego Tipaldi, Edwin Olson,
TORO - Efficient Constraint Network Optimization for SLAM Cyrill Stachniss Joint work with Giorgio Grisetti and Wolfram Burgard Special thanks to and partial slide courtesy of: Diego Tipaldi, Edwin Olson,
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
D-SLAM: Decoupled Localization and Mapping for Autonomous Robots
 D-SLAM: Decoupled Localization and Mapping for Autonomous Robots Zhan Wang, Shoudong Huang, and Gamini Dissanayake ARC Centre of Excellence for Autonomous Systems (CAS) Faculty of Engineering, University
D-SLAM: Decoupled Localization and Mapping for Autonomous Robots Zhan Wang, Shoudong Huang, and Gamini Dissanayake ARC Centre of Excellence for Autonomous Systems (CAS) Faculty of Engineering, University
Robotic Mapping. Outline. Introduction (Tom)
") Outline Robotic Mapping 6.834 Student Lecture Itamar Kahn, Thomas Lin, Yuval Mazor Introduction (Tom) Kalman Filtering (Itamar) J.J. Leonard and H.J.S. Feder. A computationally efficient method for large-scale
Outline Robotic Mapping 6.834 Student Lecture Itamar Kahn, Thomas Lin, Yuval Mazor Introduction (Tom) Kalman Filtering (Itamar) J.J. Leonard and H.J.S. Feder. A computationally efficient method for large-scale
Real Time Data Association for FastSLAM
 Real Time Data Association for FastSLAM Juan Nieto, Jose Guivant, Eduardo Nebot Australian Centre for Field Robotics, The University of Sydney, Australia fj.nieto,jguivant,nebotg@acfr.usyd.edu.au Sebastian
Real Time Data Association for FastSLAM Juan Nieto, Jose Guivant, Eduardo Nebot Australian Centre for Field Robotics, The University of Sydney, Australia fj.nieto,jguivant,nebotg@acfr.usyd.edu.au Sebastian
EKF Localization and EKF SLAM incorporating prior information
 EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization
 Statistical Techniques in Robotics (16-831, F11) Lecture#20 (November 21, 2011) Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization Lecturer: Drew Bagnell Scribes: Junier Oliva 1 1 Comments on
Statistical Techniques in Robotics (16-831, F11) Lecture#20 (November 21, 2011) Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization Lecturer: Drew Bagnell Scribes: Junier Oliva 1 1 Comments on
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
2005 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media,
 25 IEEE Personal use of this material is permitted Permission from IEEE must be obtained for all other uses in any current or future media including reprinting/republishing this material for advertising
25 IEEE Personal use of this material is permitted Permission from IEEE must be obtained for all other uses in any current or future media including reprinting/republishing this material for advertising
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
37. Simultaneous Localization and Mapping
 Sebastian Thrun, John J. Leonard 37. Simultaneous Localization and Mapping 871 This chapter provides a comprehensive introduction in to the simultaneous localization and mapping problem, better known in
Sebastian Thrun, John J. Leonard 37. Simultaneous Localization and Mapping 871 This chapter provides a comprehensive introduction in to the simultaneous localization and mapping problem, better known in
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Implementation of Odometry with EKF for Localization of Hector SLAM Method
 Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg
 Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg") Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
Optimization of the Simultaneous Localization and Map-Building Algorithm for Real-Time Implementation
 242 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 17, NO. 3, JUNE 2001 Optimization of the Simultaneous Localization and Map-Building Algorithm for Real-Time Implementation José E. Guivant and Eduardo
242 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 17, NO. 3, JUNE 2001 Optimization of the Simultaneous Localization and Map-Building Algorithm for Real-Time Implementation José E. Guivant and Eduardo
arxiv: v1 [cs.ro] 18 Jul 2016
![arxiv: v1 [cs.ro] 18 Jul 2016](/thumbs/94/121895554.jpg "arxiv: v1 [cs.ro] 18 Jul 2016") GENERATIVE SIMULTANEOUS LOCALIZATION AND MAPPING (G-SLAM) NIKOS ZIKOS AND VASSILIOS PETRIDIS arxiv:1607.05217v1 [cs.ro] 18 Jul 2016 Abstract. Environment perception is a crucial ability for robot s interaction
GENERATIVE SIMULTANEOUS LOCALIZATION AND MAPPING (G-SLAM) NIKOS ZIKOS AND VASSILIOS PETRIDIS arxiv:1607.05217v1 [cs.ro] 18 Jul 2016 Abstract. Environment perception is a crucial ability for robot s interaction
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
AUTONOMOUS SYSTEMS. LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping
 AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
Maritime UAVs Swarm Intelligent Robot Modelling and Simulation using Accurate SLAM method and Rao Blackwellized Particle Filters
 20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Maritime UAVs Swarm Intelligent Robot Modelling and Simulation using Accurate
20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Maritime UAVs Swarm Intelligent Robot Modelling and Simulation using Accurate
Using the Extended Information Filter for Localization of Humanoid Robots on a Soccer Field
 Using the Extended Information Filter for Localization of Humanoid Robots on a Soccer Field Tobias Garritsen University of Amsterdam Faculty of Science BSc Artificial Intelligence Using the Extended Information
Using the Extended Information Filter for Localization of Humanoid Robots on a Soccer Field Tobias Garritsen University of Amsterdam Faculty of Science BSc Artificial Intelligence Using the Extended Information
Simultaneous Localization and Mapping with Unknown Data Association Using FastSLAM
 Simultaneous Localization and Mapping with Unknown Data Association Using FastSLAM Michael Montemerlo, Sebastian Thrun Abstract The Extended Kalman Filter (EKF) has been the de facto approach to the Simultaneous
Simultaneous Localization and Mapping with Unknown Data Association Using FastSLAM Michael Montemerlo, Sebastian Thrun Abstract The Extended Kalman Filter (EKF) has been the de facto approach to the Simultaneous
IN recent years, NASA s Mars Exploration Rovers (MERs)
") Robust Landmark Estimation for SLAM in Dynamic Outdoor Environment Atsushi SAKAI, Teppei SAITOH and Yoji KURODA Meiji University, Department of Mechanical Engineering, 1-1-1 Higashimita, Tama-ku, Kawasaki,
Robust Landmark Estimation for SLAM in Dynamic Outdoor Environment Atsushi SAKAI, Teppei SAITOH and Yoji KURODA Meiji University, Department of Mechanical Engineering, 1-1-1 Higashimita, Tama-ku, Kawasaki,
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Results for Outdoor-SLAM Using Sparse Extended Information Filters
 in Proceedings of ICRA-23 Results for Outdoor-SLAM Using Sparse Extended Information Filters Yufeng Liu and Sebastian Thrun School of Computer Science Carnegie Mellon University yufeng@cs.cmu.edu, thrun@cs.cmu.edu
in Proceedings of ICRA-23 Results for Outdoor-SLAM Using Sparse Extended Information Filters Yufeng Liu and Sebastian Thrun School of Computer Science Carnegie Mellon University yufeng@cs.cmu.edu, thrun@cs.cmu.edu
Implementation of SLAM algorithms in a small-scale vehicle using model-based development
 Master of Science Thesis in Datorteknik, Fordonssystem Department of Electrical Engineering, Linköping University, 2017 Implementation of SLAM algorithms in a small-scale vehicle using model-based development
Master of Science Thesis in Datorteknik, Fordonssystem Department of Electrical Engineering, Linköping University, 2017 Implementation of SLAM algorithms in a small-scale vehicle using model-based development
Algorithms for Simultaneous Localization and Mapping
 Algorithms for Simultaneous Localization and Mapping Yuncong Chen February 3, 2013 Abstract Simultaneous Localization and Mapping (SLAM) is the problem in which a sensor-enabled mobile robot incrementally
Algorithms for Simultaneous Localization and Mapping Yuncong Chen February 3, 2013 Abstract Simultaneous Localization and Mapping (SLAM) is the problem in which a sensor-enabled mobile robot incrementally
SLAM using Visual Scan-Matching with Distinguishable 3D Points
 SLAM using Visual Scan-Matching with Distinguishable 3D Points Federico Bertolli, Patric Jensfelt, and Henrik I. Christensen Centre for Autonomous Systems Royal Institute of Technology, Stockholm, Sweden
SLAM using Visual Scan-Matching with Distinguishable 3D Points Federico Bertolli, Patric Jensfelt, and Henrik I. Christensen Centre for Autonomous Systems Royal Institute of Technology, Stockholm, Sweden
A Relative Mapping Algorithm
 A Relative Mapping Algorithm Jay Kraut Abstract This paper introduces a Relative Mapping Algorithm. This algorithm presents a new way of looking at the SLAM problem that does not use Probability, Iterative
A Relative Mapping Algorithm Jay Kraut Abstract This paper introduces a Relative Mapping Algorithm. This algorithm presents a new way of looking at the SLAM problem that does not use Probability, Iterative
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Results for Outdoor-SLAM Using Sparse Extended Information Filters
 Results for Outdoor-SLAM Using Sparse Extended Information Filters Yufeng Liu and Sebastian Thrun School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 yufeng@cs.cmu.edu, thrun@cs.cmu.edu
Results for Outdoor-SLAM Using Sparse Extended Information Filters Yufeng Liu and Sebastian Thrun School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 yufeng@cs.cmu.edu, thrun@cs.cmu.edu
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching
 Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Scalable Monocular SLAM
 Scalable Monocular SLAM Ethan Eade Tom Drummond Cambridge University {ee231, twd20}@cam.ac.uk Abstract Localization and mapping in unknown environments becomes more difficult as the complexity of the environment
Scalable Monocular SLAM Ethan Eade Tom Drummond Cambridge University {ee231, twd20}@cam.ac.uk Abstract Localization and mapping in unknown environments becomes more difficult as the complexity of the environment
7630 Autonomous Robotics Probabilities for Robotics
 7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
An Embedded Particle Filter SLAM implementation using an affordable platform
 An Embedded Particle Filter SLAM implementation using an affordable platform Martin Llofriu 1,2, Federico Andrade 1, Facundo Benavides 1, Alfredo Weitzenfeld 2 and Gonzalo Tejera 1 1 Instituto de Computación,
An Embedded Particle Filter SLAM implementation using an affordable platform Martin Llofriu 1,2, Federico Andrade 1, Facundo Benavides 1, Alfredo Weitzenfeld 2 and Gonzalo Tejera 1 1 Instituto de Computación,
Robot Mapping. Least Squares Approach to SLAM. Cyrill Stachniss
 Robot Mapping Least Squares Approach to SLAM Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for
Robot Mapping Least Squares Approach to SLAM Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for
Graphbased. Kalman filter. Particle filter. Three Main SLAM Paradigms. Robot Mapping. Least Squares Approach to SLAM. Least Squares in General
 Robot Mapping Three Main SLAM Paradigms Least Squares Approach to SLAM Kalman filter Particle filter Graphbased Cyrill Stachniss least squares approach to SLAM 1 2 Least Squares in General! Approach for
Robot Mapping Three Main SLAM Paradigms Least Squares Approach to SLAM Kalman filter Particle filter Graphbased Cyrill Stachniss least squares approach to SLAM 1 2 Least Squares in General! Approach for
Integrated systems for Mapping and Localization
 Integrated systems for Mapping and Localization Patric Jensfelt, Henrik I Christensen & Guido Zunino Centre for Autonomous Systems, Royal Institute of Technology SE 1 44 Stockholm, Sweden fpatric,hic,guidozg@nada.kth.se
Integrated systems for Mapping and Localization Patric Jensfelt, Henrik I Christensen & Guido Zunino Centre for Autonomous Systems, Royal Institute of Technology SE 1 44 Stockholm, Sweden fpatric,hic,guidozg@nada.kth.se
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Integrated Sensing Framework for 3D Mapping in Outdoor Navigation
 Integrated Sensing Framework for 3D Mapping in Outdoor Navigation R. Katz, N. Melkumyan, J. Guivant, T. Bailey, J. Nieto and E. Nebot ARC Centre of Excellence for Autonomous Systems Australian Centre for
Integrated Sensing Framework for 3D Mapping in Outdoor Navigation R. Katz, N. Melkumyan, J. Guivant, T. Bailey, J. Nieto and E. Nebot ARC Centre of Excellence for Autonomous Systems Australian Centre for
CI-Graph: An efficient approach for Large Scale SLAM
 2009 IEEE International Conference on Robotics and Automation Kobe International Conference Center Kobe, Japan, May 12-17, 2009 CI-Graph: An efficient approach for Large Scale SLAM Pedro Piniés, Lina M.
2009 IEEE International Conference on Robotics and Automation Kobe International Conference Center Kobe, Japan, May 12-17, 2009 CI-Graph: An efficient approach for Large Scale SLAM Pedro Piniés, Lina M.
Evaluation of Pose Only SLAM
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Evaluation of Pose Only SLAM Gibson Hu, Shoudong Huang and Gamini Dissanayake Abstract In
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Evaluation of Pose Only SLAM Gibson Hu, Shoudong Huang and Gamini Dissanayake Abstract In
Kalman Filter Based. Localization
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Kalman Filter Based Localization & SLAM Zürich Autonomous
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Kalman Filter Based Localization & SLAM Zürich Autonomous
Recovering Particle Diversity in a Rao-Blackwellized Particle Filter for SLAM After Actively Closing Loops
 Recovering Particle Diversity in a Rao-Blackwellized Particle Filter for SLAM After Actively Closing Loops Cyrill Stachniss University of Freiburg Department of Computer Science D-79110 Freiburg, Germany
Recovering Particle Diversity in a Rao-Blackwellized Particle Filter for SLAM After Actively Closing Loops Cyrill Stachniss University of Freiburg Department of Computer Science D-79110 Freiburg, Germany
SLAM in O(log n) with the Combined Kalman -Information Filter
 with the Combined Kalman -Information Filter") SLAM in O(log n) with the Combined Kalman -Information Filter César Cadena and José Neira Abstract In this paper we show that SLAM can be executed in as low as O(log n) per step. Our algorithm, the Combined
SLAM in O(log n) with the Combined Kalman -Information Filter César Cadena and José Neira Abstract In this paper we show that SLAM can be executed in as low as O(log n) per step. Our algorithm, the Combined
A Lightweight SLAM Algorithm for Indoor Autonomous Navigation
 A Lightweight SLAM Algorithm for Indoor Autonomous Navigation Paolo Tripicchio, Matteo Unetti, Nicola Giordani, Carlo A. Avizzano and Massimo Satler Abstract Simultaneous Localization and Mapping (SLAM)
A Lightweight SLAM Algorithm for Indoor Autonomous Navigation Paolo Tripicchio, Matteo Unetti, Nicola Giordani, Carlo A. Avizzano and Massimo Satler Abstract Simultaneous Localization and Mapping (SLAM)
Multi-Robot SLAM with Topological/Metric Maps
 Proceedings of the 007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 9 - Nov, 007 WeA1. Multi-Robot SLAM with Topological/Metric Maps H. Jacy Chang, C. S.
Proceedings of the 007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 9 - Nov, 007 WeA1. Multi-Robot SLAM with Topological/Metric Maps H. Jacy Chang, C. S.
Car park mapping with simultaneous localisation and mapping (SLAM)
") Car park mapping with simultaneous localisation and mapping (SLAM) Christopher Tay To cite this version: Christopher Tay. Car park mapping with simultaneous localisation and mapping (SLAM). [Technical
Car park mapping with simultaneous localisation and mapping (SLAM) Christopher Tay To cite this version: Christopher Tay. Car park mapping with simultaneous localisation and mapping (SLAM). [Technical
Fast Randomized Planner for SLAM Automation
 Fast Randomized Planner for SLAM Automation Amey Parulkar*, Piyush Shukla*, K Madhava Krishna+ Abstract In this paper, we automate the traditional problem of Simultaneous Localization and Mapping (SLAM)
Fast Randomized Planner for SLAM Automation Amey Parulkar*, Piyush Shukla*, K Madhava Krishna+ Abstract In this paper, we automate the traditional problem of Simultaneous Localization and Mapping (SLAM)
Introduction to SLAM Part II. Paul Robertson
 Introduction to SLAM Part II Paul Robertson Localization Review Tracking, Global Localization, Kidnapping Problem. Kalman Filter Quadratic Linear (unless EKF) SLAM Loop closing Scaling: Partition space
Introduction to SLAM Part II Paul Robertson Localization Review Tracking, Global Localization, Kidnapping Problem. Kalman Filter Quadratic Linear (unless EKF) SLAM Loop closing Scaling: Partition space
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Stereo Vision as a Sensor for EKF SLAM
 Stereo Vision as a Sensor for EKF SLAM Wikus Brink Electronic Systems Lab Electrical and Electronic Engineering University of Stellenbosch Email: 1483986@sun.ac.za Corné E. van Daalen Electronic Systems
Stereo Vision as a Sensor for EKF SLAM Wikus Brink Electronic Systems Lab Electrical and Electronic Engineering University of Stellenbosch Email: 1483986@sun.ac.za Corné E. van Daalen Electronic Systems
Combined Trajectory Planning and Gaze Direction Control for Robotic Exploration
 Combined Trajectory Planning and Gaze Direction Control for Robotic Exploration Georgios Lidoris, Kolja Kühnlenz, Dirk Wollherr and Martin Buss Institute of Automatic Control Engineering (LSR) Technische
Combined Trajectory Planning and Gaze Direction Control for Robotic Exploration Georgios Lidoris, Kolja Kühnlenz, Dirk Wollherr and Martin Buss Institute of Automatic Control Engineering (LSR) Technische
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
SLAM Part 2 and Intro to Kernel Machines
 Statistical Techniques in Robotics (16-831, F11) Lecture #21 (Nov 28, 2011) SLAM Part 2 and Intro to Kernel Machines Lecturer: Drew Bagnell Scribe: Robbie Paolini 1 1 Fast SLAM Fast SLAM is an algorithm
Statistical Techniques in Robotics (16-831, F11) Lecture #21 (Nov 28, 2011) SLAM Part 2 and Intro to Kernel Machines Lecturer: Drew Bagnell Scribe: Robbie Paolini 1 1 Fast SLAM Fast SLAM is an algorithm
Simultaneous localization and mapping (SLAM) is the
 is the") T U T O R I A L Simultaneous Localization and Mapping (SLAM): Part II BY TIM BAILEY AND HUGH DURRANT-WHYTE Simultaneous localization and mapping (SLAM) is the process by which a mobile robot can build
T U T O R I A L Simultaneous Localization and Mapping (SLAM): Part II BY TIM BAILEY AND HUGH DURRANT-WHYTE Simultaneous localization and mapping (SLAM) is the process by which a mobile robot can build
An Autonomous Robotic System for Mapping Abandoned Mines
 An Autonomous Robotic System for Mapping Abandoned Mines D. Ferguson, A. Morris, D. Hähnel, C. Baker, Z. Omohundro, C. Reverte S. Thayer, W. Whittaker, W. Whittaker, W. Burgard, S. Thrun School of Computer
An Autonomous Robotic System for Mapping Abandoned Mines D. Ferguson, A. Morris, D. Hähnel, C. Baker, Z. Omohundro, C. Reverte S. Thayer, W. Whittaker, W. Whittaker, W. Burgard, S. Thrun School of Computer
SLAM in Large-scale Cyclic Environments using the Atlas Framework
 SLAM in Large-scale Cyclic Environments using the Atlas Framework Michael Bosse Paul Newman John Leonard Seth Teller Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology
SLAM in Large-scale Cyclic Environments using the Atlas Framework Michael Bosse Paul Newman John Leonard Seth Teller Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology
Graphical SLAM using Vision and the Measurement Subspace
 Graphical SLAM using Vision and the Measurement Subspace John Folkesson, Patric Jensfelt and Henrik I. Christensen Centre for Autonomous Systems Royal Institute Technology SE-100 44 Stockholm [johnf,patric,hic]@nada.kth.se
Graphical SLAM using Vision and the Measurement Subspace John Folkesson, Patric Jensfelt and Henrik I. Christensen Centre for Autonomous Systems Royal Institute Technology SE-100 44 Stockholm [johnf,patric,hic]@nada.kth.se
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
MSc. Thesis dissertation: 3D Visual SLAM applied to large-scale underwater scenarios
 MSc. Thesis dissertation: 3D Visual SLAM applied to large-scale underwater scenarios Author: Josep Aulinas a Supervisors: Dr. Joaquim Salvi a and Dr. Yvan Petillot b a Institute of Informatics and Applications
MSc. Thesis dissertation: 3D Visual SLAM applied to large-scale underwater scenarios Author: Josep Aulinas a Supervisors: Dr. Joaquim Salvi a and Dr. Yvan Petillot b a Institute of Informatics and Applications
IPJC: The Incremental Posterior Joint Compatibility Test for Fast Feature Cloud Matching
 IPJC: The Incremental Posterior Joint Compatibility Test for Fast Feature Cloud Matching Edwin B. Olson 1 and Yangming Li 2 Abstract One of the fundamental challenges in robotics is data-association: determining
IPJC: The Incremental Posterior Joint Compatibility Test for Fast Feature Cloud Matching Edwin B. Olson 1 and Yangming Li 2 Abstract One of the fundamental challenges in robotics is data-association: determining
Computer Science and Artificial Intelligence Laboratory Technical Report. MIT-CSAIL-TR January 29, 2010
 Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2010-021 January 29, 2010 The Bayes Tree: Enabling Incremental Reordering and Fluid Relinearization for Online Mapping
Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2010-021 January 29, 2010 The Bayes Tree: Enabling Incremental Reordering and Fluid Relinearization for Online Mapping
A FastSLAM Algorithm for Omnivision
 A FastSLAM Algorithm for Omnivision Cristina Gamallo, Manuel Mucientes and Carlos V. Regueiro Abstract Omnidirectional cameras have a wide field of view, which makes them specially suitable for Simultaneous
A FastSLAM Algorithm for Omnivision Cristina Gamallo, Manuel Mucientes and Carlos V. Regueiro Abstract Omnidirectional cameras have a wide field of view, which makes them specially suitable for Simultaneous
Using the Topological Skeleton for Scalable Global Metrical Map-Building
 Using the Topological Skeleton for Scalable Global Metrical Map-Building Joseph Modayil, Patrick Beeson, and Benjamin Kuipers Intelligent Robotics Lab Department of Computer Sciences University of Texas
Using the Topological Skeleton for Scalable Global Metrical Map-Building Joseph Modayil, Patrick Beeson, and Benjamin Kuipers Intelligent Robotics Lab Department of Computer Sciences University of Texas
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Monocular SLAM as a Graph of Coalesced Observations
 Monocular SLAM as a Graph of Coalesced Observations Ethan Eade ee231@cam.ac.uk Tom Drummond twd20@cam.ac.uk Abstract We present a monocular SLAM system that avoids inconsistency by coalescing observations
Monocular SLAM as a Graph of Coalesced Observations Ethan Eade ee231@cam.ac.uk Tom Drummond twd20@cam.ac.uk Abstract We present a monocular SLAM system that avoids inconsistency by coalescing observations
High Accuracy Navigation Using Laser Range Sensors in Outdoor Applications
 Proceedings of the 2000 IEEE International Conference on Robotics & Automation San Francisco, CA April 2000 High Accuracy Navigation Using Laser Range Sensors in Outdoor Applications Jose Guivant, Eduardo
Proceedings of the 2000 IEEE International Conference on Robotics & Automation San Francisco, CA April 2000 High Accuracy Navigation Using Laser Range Sensors in Outdoor Applications Jose Guivant, Eduardo
An Atlas Framework for Scalable Mapping
 An Atlas Framework for Scalable Mapping Michael Bosse 1 Paul Newman 2 John Leonard 2 Martin Soika 3 Wendelin Feiten 3 Seth Teller 1 1 Laboratory of Computer Science and 2 Ocean Engineering Massachusetts
An Atlas Framework for Scalable Mapping Michael Bosse 1 Paul Newman 2 John Leonard 2 Martin Soika 3 Wendelin Feiten 3 Seth Teller 1 1 Laboratory of Computer Science and 2 Ocean Engineering Massachusetts