Optimal Control Techniques for Dynamic Walking
|
|
|
- June Wade
- 6 years ago
- Views:
Transcription

1 Optimal Control Techniques for Dynamic Walking Optimization in Robotics & Biomechanics IWR, University of Heidelberg Presentation partly based on slides by Sebastian Sager, Moritz Diehl and Peter Riede Dynamic Walking 2011 Jena

 to optimize robot motions There is a lot more to optimal")
2 Why do we do this tutorial? There are a lot of optimal control problems in walking robots There are often statements like We use SNOPT (fmincon,... etc.) to optimize robot motions There is a lot more to optimal control than to nonlinear optimization!!
3 Introduction Katja Mombaur

4 Nonlinear Optimization Problem Famous nonlinear example function Rosenbrock function Fletcher Banana valley function

5 Important property of nonlinear optimization problems The optimization is performed in finite dimensional space The result is a point in finite dimensional space This will change for the next problem class

6 Optimal control problems Optimal control = Optimal choice of inputs for a dynamic system

7 Optimal control problems Optimization problems including dynamics e.g. optimal control problems State and control variables are functions in time (infinite-dimensional variables)
8 Optimal control methods Transformation from optimal control to nonlinear optimization problem Optimal control method Nonlinear Optimization Methods
9 MUSCOD an efficient tool for optimal control problems Developed by Bock and co-workers (IWR, University of Heidelberg) Original version Muscod I 1981 (Fortran 77) MUSCOD II developed in 1995 ( C ) Since then continuous extensions and updates (e.g. Mixed integer optimal control, NMPC,...) also contains efficient integrators with sensitivity generation Unfortunately not yet publicly available, but maybe in the near future If you are interested, contact us
10 Optimal Control
11 Optimal control problem (simplifed) Lagrange type Mayer type Objective function Process dynamics Initial and final constrainte
12 Optimal control problem (more complex) e.g. for the optimization of dynamic robot gaits: Multiphase problems with many additional constraints But we will stay with the simple problems for now
13 3 different approaches for optimal control problems Reminder Key problem: How to handle infinite dimensionality of states x(t) and controls u(t)? Dynamic Programming / Hamilton-Jacobi-Bellman equation Indirect Methods/ calculus of variations/ Pontryagin Maximum Principle Direct Methods (discretization of controls) Only approach treated in this talk
14 Direct methods for optimal control problems Common idea: replace control functions u by a discretization (= a finite-dimensional parameter vector) Are also called First-dicretize-then-optimize methods Infinite dimensionality of controls resolved But what about states x(t)?
15 Three different methods for state discretization Direct Collocation Direct Single Shooting Direct Multiple Shooting
16 Direct Single Shooting

17 NLP in Direct Single Shooting
18 Numerical example
19 Single shooting optimization for x 0 = 0.05
20 Single shooting iteration Solution
21 Direct Single Shooting: Pros and Cons + Concept easy to understand + Can use state-of-the art ODE or DAE integrators + (comparatively) Few optimization variables even for large ODE/DAE systems + Need only initial guess for controls q - Can not use knowledge of x in initialization (e.g. in tracking problems) - Often does not work when initial guesses for controls are far off trajectory explodes - Unstable systes are difficult/impossible to treat These drawbacks are adressed by Multiple Shooting Often used in enigineering applications, e.g. in packages gopt (PSE), ADOPT (Marquardt),...
22 Direct Multiple Shooting Bock, Plitt, 1981 Discretize controls piecewise on a coarse grid Use functions which have only local support, e.g. piecewise constant or piecewise linear functions
23 Direct Multiple Shooting Bock, Plitt, 1981 Split long integration interval into many shorter ones Use initial values of all integration intervals as free variables and shoot a new integration from each initial value
24 Direct Multiple Shooting Bock, Plitt, 1981 Introduce constraints to close gaps ( continuity conditions ) Also use integators to compute objective function
25 Discretized Optimal Control Problem
26 How to solve the NLP
27 The Lagrangian Function for NLP Lagrangian function of the constrained NLP equality multipliers λ i may have both signs in a solution inequality multipliers µ i cannot be negative (cf. shadow prices) for inactive constraints, multipliers µ i are zero
28 First order optimality conditions Karush-Kuhn-Tucker necessary conditions (KKT-conditions): x * feasible there exist λ *, µ * such that and it holds the complementary condition i.e. µ i* = 0 or h i (x * )= 0 for all i
29 Newton s method for unconstrained NLP Idea: calculate zeros of the equation to satisfy first order optimality constraints Taylor series: Newton Iteration: Inverse of Hessian Gradient of Lagrangian function
30 SQP - applying Newton s method to KKT Newton s method finds zeros of nonlinear equations
31 SQP sequential quadratic programming This is equivalent to solving the following quadratic programming problem (QP) in each step of the SQP Hessian of Lagrangian function use active-set-strategy to determine active inequality constraints Practical SQP: use update formula for Hessian use step size adaption




32 Example - Newton s method Behavior for banana valley function
33 Example - comparison between methods Newton s method much faster than steepest descent method convergence roughly linear for first iterations since step length α k <1 convergence roughly quadratic for last iterations with step length α k 1
34 Essential steps in NLP solution Sequential quadratic programming (SQP) methods are very efficient methods to solve nonlinear programming problems Use a QP approximation to the NLP at every iteration SQP = Newton s method applied to KKT conditions Reduction of computation times by computation of Hessians via update formula Globalization of convergence by using damped Newton steps Important to note: iterates can be infeasible, only solution must be feasible
35 Back to the optimal control problem
36 Direct multiple shooting Bock, Plitt, 1981 Simultanuous optimization and simulation Discretized optimal control problem (NLP) Variables: discretized states s i, discretized controls u i, parameters p, Phase durations h i s i, u i, p, h x e,i + sens. Initial value problem solution (Integration + derivatives) on each multiple shooting interval s i x e,i Solution by efficient SQP Solution by efficient integrators

37 Trajectory sensitivity generation: black box - a bad idea
38 Trajectory sensitivity generation: IND a good idea! IND = internal numerical differentiation (Bock, 1981)
39 Direct Multiple Shooting Result of discretization: Large-scale nonlinear programming problem (NLP) Special structure originating from discretization (in KKT matrix) Bock, Plitt, 1981 Hessian of Lagrange Fct Constraint Jacobians MUSCOD Solution with structure-exploiting, tailored sequential quadratic programming (SQP) method, special condensing techniques
40 Direct Multiple Shooting example Same example as before; same initialization : u = 0 3 iterations compared to 7 for single shooting
41 Direct Multiple Shooting: Pros and Cons
42 Demonstration of example optimal control problem solution with MUSCOD-II A simple example

43 A simple optimal control problem A car is supposed to travel 300 m in 32 seconds Its initial and final velocity are zero The acceleration can vary between -2 m/s 2 and 1m/s 2 The maximum velocity is 30 m/s Optimization goal: minimize energy in terms of accelrations squared
44 A simple optimal control problem Mathematical formulation: subject to the constraints: Objective function (Lagrange type) lfcn Dynamic process model ffcn Initial and final constraints rdfcn Bounds (data file)
45 MUSCOD-II Model file Macros # of model stages # of global parameters # coupled constraints among them, # of equaliy cnstraints # of differential state variables # of algebraic state variables # of controls # of local parameters # of start point constraints among them, # of equality constraints # of end point constraints among them, # of equality constraints
46 MUSCOD II source file Objective function: Integral term, Lagrange type Dynamical equations (right hand side)
47 MUSCOD II source file Constraint equations
48 MUSCOD-II source file // Define optimal control problem //Define model dimensions // Define model stage with index, dimensions of // state and control variables, pointers to // right hand side and objective fnctions,... etc.
49 MUSCOD-II source file // Define multipoint constraints (at start point, interior points or end point (of last phase)
50 MUSCOD-II data file Define number of multiple shooting intervals (also equals number of control intervals) Define start values, min and max values, and scaling factors for phase time flag to fix variable
51 MUSCOD-II data file Define type of state initialization: s_spec= 0: every point 1: start value generation by linear interpolation 2: start value generation by forward integration Define start values, scaling factors, min and max values for states
52 MUSCOD-II data file Type of control discretization u_ Control variable start values, scaling, min and max
53 MUSCOD-II data file Scaling of constraints: Scaling, min and max of objective function
54 Results
55 Same problem with different objective function Mathematical formulation: subject to the constraints: Objective function (Mayer type) mfcn Dynamic process model ffcn Initial and final constraints rdfcn Bounds (data file)
56 Results for time minimization
57 Demonstration of example optimal control problem solution with MUSCOD-II: A bipedal running robot

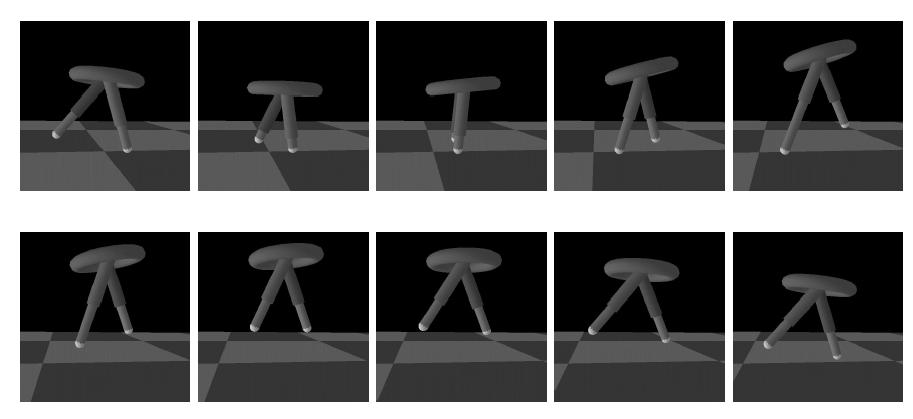
58 A bipedal running robot Running motion: alternation between single leg contact phases and flight phases Touch -down Leg1 Phase 1: Contact Takeoff Phase 2: Flight Touch -down Leg2 + Leg shift
59 A bipedal running robot 5 DOF in flight 4 DOF in contact 4 actuators : trunk Upper legs lower legs (massless) Only active in contact phase
60 Model of bipedal running robot Flight phase
61 Contact phase Spring damper forces Coupling between state variables
62 Model of bipedal running robot Contact phase
63 Form of model equations required for optimal control code MUSCOD. x = ffcn where a is the solution of see previous slides also satisfying
64 Switching functions Switching function for lift-off: Must also satisfy condition: Leg spring at rest length Positive vertical velocity (moving up) Switching function for take-off: Must also satisfy condition: Height of contact point = zero Negative vertical velocity at contact point
65 Touchdown discontinuity & Periodicity Inelastic impact: there is a jump in all model velocities at touchdown compute velocity after touchdown: Periodicity constraints on all positions (except forward direction) and velocities
66


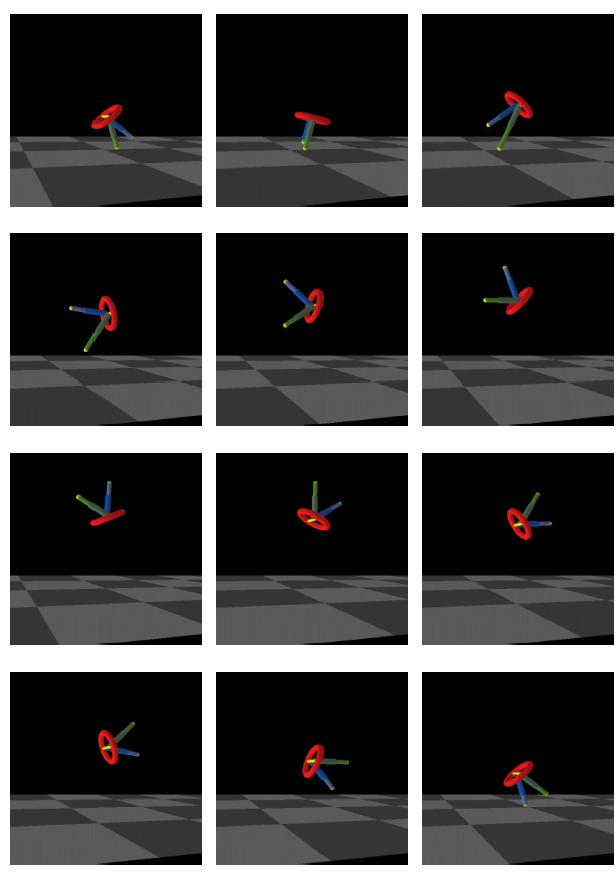
67 The same robot performing summersaults... Mombaur et al Only requires modification of periodicity constraints: in torso and leg angles per step
68

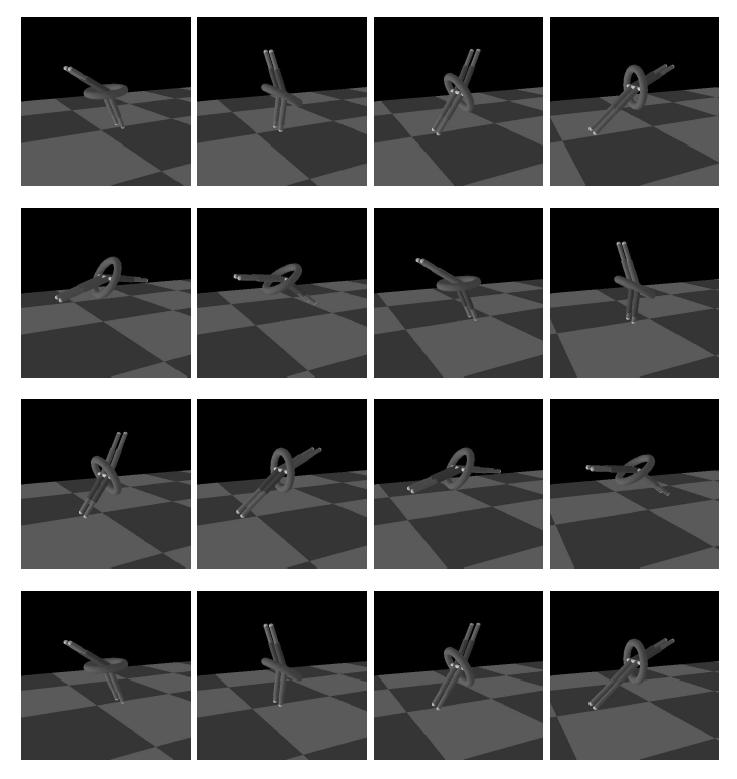
69 ... and even open-loop stable flip-flops Requires another modification of periodicity constraints: in torso and leg angles per step
70
71 Literature

72 Thank you for your attention! Katja Mombaur Pictures taken at the Musée de l Automate, Souillac
CasADi tutorial Introduction
 Lund, 6 December 2011 CasADi tutorial Introduction Joel Andersson Department of Electrical Engineering (ESAT-SCD) & Optimization in Engineering Center (OPTEC) Katholieke Universiteit Leuven OPTEC (ESAT
Lund, 6 December 2011 CasADi tutorial Introduction Joel Andersson Department of Electrical Engineering (ESAT-SCD) & Optimization in Engineering Center (OPTEC) Katholieke Universiteit Leuven OPTEC (ESAT
Real-Time Optimization for Fast Nonlinear MPC: Algorithms, Theory, and Applications
 Real-Time Optimization for Fast Nonlinear MPC: Algorithms, Theory, and Applications Moritz Diehl Optimization in Engineering Center OPTEC & ESAT, K.U. Leuven Joint work with H. J. Ferreau*, B. Houska*,
Real-Time Optimization for Fast Nonlinear MPC: Algorithms, Theory, and Applications Moritz Diehl Optimization in Engineering Center OPTEC & ESAT, K.U. Leuven Joint work with H. J. Ferreau*, B. Houska*,
Introduction to Optimization
 Introduction to Optimization Second Order Optimization Methods Marc Toussaint U Stuttgart Planned Outline Gradient-based optimization (1st order methods) plain grad., steepest descent, conjugate grad.,
Introduction to Optimization Second Order Optimization Methods Marc Toussaint U Stuttgart Planned Outline Gradient-based optimization (1st order methods) plain grad., steepest descent, conjugate grad.,
Introduction to Optimization Problems and Methods
 Introduction to Optimization Problems and Methods wjch@umich.edu December 10, 2009 Outline 1 Linear Optimization Problem Simplex Method 2 3 Cutting Plane Method 4 Discrete Dynamic Programming Problem Simplex
Introduction to Optimization Problems and Methods wjch@umich.edu December 10, 2009 Outline 1 Linear Optimization Problem Simplex Method 2 3 Cutting Plane Method 4 Discrete Dynamic Programming Problem Simplex
Fast Direct Multiple Shooting Algorithms for Optimal Robot Control
 Fast Direct Multiple Shooting Algorithms for Optimal Robot Control Moritz Diehl, Hans Georg Bock, Holger Diedam, Pierre-Brice Wieber To cite this version: Moritz Diehl, Hans Georg Bock, Holger Diedam,
Fast Direct Multiple Shooting Algorithms for Optimal Robot Control Moritz Diehl, Hans Georg Bock, Holger Diedam, Pierre-Brice Wieber To cite this version: Moritz Diehl, Hans Georg Bock, Holger Diedam,
Contents. I Basics 1. Copyright by SIAM. Unauthorized reproduction of this article is prohibited.
 page v Preface xiii I Basics 1 1 Optimization Models 3 1.1 Introduction... 3 1.2 Optimization: An Informal Introduction... 4 1.3 Linear Equations... 7 1.4 Linear Optimization... 10 Exercises... 12 1.5
page v Preface xiii I Basics 1 1 Optimization Models 3 1.1 Introduction... 3 1.2 Optimization: An Informal Introduction... 4 1.3 Linear Equations... 7 1.4 Linear Optimization... 10 Exercises... 12 1.5
Inverse KKT Motion Optimization: A Newton Method to Efficiently Extract Task Spaces and Cost Parameters from Demonstrations
 Inverse KKT Motion Optimization: A Newton Method to Efficiently Extract Task Spaces and Cost Parameters from Demonstrations Peter Englert Machine Learning and Robotics Lab Universität Stuttgart Germany
Inverse KKT Motion Optimization: A Newton Method to Efficiently Extract Task Spaces and Cost Parameters from Demonstrations Peter Englert Machine Learning and Robotics Lab Universität Stuttgart Germany
Optimization III: Constrained Optimization
 Optimization III: Constrained Optimization CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Optimization III: Constrained Optimization
Optimization III: Constrained Optimization CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Optimization III: Constrained Optimization
Programming, numerics and optimization
 Programming, numerics and optimization Lecture C-4: Constrained optimization Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428 June
Programming, numerics and optimization Lecture C-4: Constrained optimization Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428 June
LECTURE 13: SOLUTION METHODS FOR CONSTRAINED OPTIMIZATION. 1. Primal approach 2. Penalty and barrier methods 3. Dual approach 4. Primal-dual approach
 LECTURE 13: SOLUTION METHODS FOR CONSTRAINED OPTIMIZATION 1. Primal approach 2. Penalty and barrier methods 3. Dual approach 4. Primal-dual approach Basic approaches I. Primal Approach - Feasible Direction
LECTURE 13: SOLUTION METHODS FOR CONSTRAINED OPTIMIZATION 1. Primal approach 2. Penalty and barrier methods 3. Dual approach 4. Primal-dual approach Basic approaches I. Primal Approach - Feasible Direction
Department of Mathematics Oleg Burdakov of 30 October Consider the following linear programming problem (LP):
:") Linköping University Optimization TAOP3(0) Department of Mathematics Examination Oleg Burdakov of 30 October 03 Assignment Consider the following linear programming problem (LP): max z = x + x s.t. x x
Linköping University Optimization TAOP3(0) Department of Mathematics Examination Oleg Burdakov of 30 October 03 Assignment Consider the following linear programming problem (LP): max z = x + x s.t. x x
Trajectory Optimization
 C H A P T E R 12 Trajectory Optimization So far, we have discussed a number of ways to solve optimal control problems via state space search (e.g., Dijkstra s and Dynamic Programming/Value Iteration).
C H A P T E R 12 Trajectory Optimization So far, we have discussed a number of ways to solve optimal control problems via state space search (e.g., Dijkstra s and Dynamic Programming/Value Iteration).
Theoretical Concepts of Machine Learning
 Theoretical Concepts of Machine Learning Part 2 Institute of Bioinformatics Johannes Kepler University, Linz, Austria Outline 1 Introduction 2 Generalization Error 3 Maximum Likelihood 4 Noise Models 5
Theoretical Concepts of Machine Learning Part 2 Institute of Bioinformatics Johannes Kepler University, Linz, Austria Outline 1 Introduction 2 Generalization Error 3 Maximum Likelihood 4 Noise Models 5
Introduction to Optimization
 Introduction to Optimization Constrained Optimization Marc Toussaint U Stuttgart Constrained Optimization General constrained optimization problem: Let R n, f : R n R, g : R n R m, h : R n R l find min
Introduction to Optimization Constrained Optimization Marc Toussaint U Stuttgart Constrained Optimization General constrained optimization problem: Let R n, f : R n R, g : R n R m, h : R n R l find min
APPLIED OPTIMIZATION WITH MATLAB PROGRAMMING
 APPLIED OPTIMIZATION WITH MATLAB PROGRAMMING Second Edition P. Venkataraman Rochester Institute of Technology WILEY JOHN WILEY & SONS, INC. CONTENTS PREFACE xiii 1 Introduction 1 1.1. Optimization Fundamentals
APPLIED OPTIMIZATION WITH MATLAB PROGRAMMING Second Edition P. Venkataraman Rochester Institute of Technology WILEY JOHN WILEY & SONS, INC. CONTENTS PREFACE xiii 1 Introduction 1 1.1. Optimization Fundamentals
Constrained Optimization COS 323
 Constrained Optimization COS 323 Last time Introduction to optimization objective function, variables, [constraints] 1-dimensional methods Golden section, discussion of error Newton s method Multi-dimensional
Constrained Optimization COS 323 Last time Introduction to optimization objective function, variables, [constraints] 1-dimensional methods Golden section, discussion of error Newton s method Multi-dimensional
Chapter 3 Numerical Methods
 Chapter 3 Numerical Methods Part 1 3.1 Linearization and Optimization of Functions of Vectors 1 Problem Notation 2 Outline 3.1.1 Linearization 3.1.2 Optimization of Objective Functions 3.1.3 Constrained
Chapter 3 Numerical Methods Part 1 3.1 Linearization and Optimization of Functions of Vectors 1 Problem Notation 2 Outline 3.1.1 Linearization 3.1.2 Optimization of Objective Functions 3.1.3 Constrained
Unconstrained Optimization Principles of Unconstrained Optimization Search Methods
 1 Nonlinear Programming Types of Nonlinear Programs (NLP) Convexity and Convex Programs NLP Solutions Unconstrained Optimization Principles of Unconstrained Optimization Search Methods Constrained Optimization
1 Nonlinear Programming Types of Nonlinear Programs (NLP) Convexity and Convex Programs NLP Solutions Unconstrained Optimization Principles of Unconstrained Optimization Search Methods Constrained Optimization
Chapter II. Linear Programming
 1 Chapter II Linear Programming 1. Introduction 2. Simplex Method 3. Duality Theory 4. Optimality Conditions 5. Applications (QP & SLP) 6. Sensitivity Analysis 7. Interior Point Methods 1 INTRODUCTION
1 Chapter II Linear Programming 1. Introduction 2. Simplex Method 3. Duality Theory 4. Optimality Conditions 5. Applications (QP & SLP) 6. Sensitivity Analysis 7. Interior Point Methods 1 INTRODUCTION
DIRECT SEQUENTIAL DYNAMIC OPTIMIZATION WITH AUTOMATIC SWITCHING STRUCTURE DETECTION. Martin Schlegel, Wolfgang Marquardt 1
 DIRECT SEQUENTIAL DYNAMIC OPTIMIZATION WITH AUTOMATIC SWITCHING STRUCTURE DETECTION Martin Schlegel, Wolfgang Marquardt 1 Lehrstuhl für Prozesstechnik, RWTH Aachen University D 52056 Aachen, Germany Abstract:
DIRECT SEQUENTIAL DYNAMIC OPTIMIZATION WITH AUTOMATIC SWITCHING STRUCTURE DETECTION Martin Schlegel, Wolfgang Marquardt 1 Lehrstuhl für Prozesstechnik, RWTH Aachen University D 52056 Aachen, Germany Abstract:
Nonlinear Programming
 Nonlinear Programming SECOND EDITION Dimitri P. Bertsekas Massachusetts Institute of Technology WWW site for book Information and Orders http://world.std.com/~athenasc/index.html Athena Scientific, Belmont,
Nonlinear Programming SECOND EDITION Dimitri P. Bertsekas Massachusetts Institute of Technology WWW site for book Information and Orders http://world.std.com/~athenasc/index.html Athena Scientific, Belmont,
Maximizing an interpolating quadratic
 Week 11: Monday, Apr 9 Maximizing an interpolating quadratic Suppose that a function f is evaluated on a reasonably fine, uniform mesh {x i } n i=0 with spacing h = x i+1 x i. How can we find any local
Week 11: Monday, Apr 9 Maximizing an interpolating quadratic Suppose that a function f is evaluated on a reasonably fine, uniform mesh {x i } n i=0 with spacing h = x i+1 x i. How can we find any local
qpoases - Online Active Set Strategy for Fast Linear MPC
 qpoases - Online Active Set Strategy for Fast Linear MPC Moritz Diehl, Hans Joachim Ferreau, Lieboud Vanden Broeck, Jan Swevers Dept. ESAT and Center of Excellence for Optimization in Engineering OPTEC
qpoases - Online Active Set Strategy for Fast Linear MPC Moritz Diehl, Hans Joachim Ferreau, Lieboud Vanden Broeck, Jan Swevers Dept. ESAT and Center of Excellence for Optimization in Engineering OPTEC
Nonlinear Model Predictive Control Using Multiple Shooting Combined with Collocation on Finite Elements
 Nonlinear Model Predictive Control Using Multiple Shooting Combined with Collocation on Finite Elements Jasem Tamimi and Pu Li Simulation and Optimal Processes Group, Institute of Automation and Systems
Nonlinear Model Predictive Control Using Multiple Shooting Combined with Collocation on Finite Elements Jasem Tamimi and Pu Li Simulation and Optimal Processes Group, Institute of Automation and Systems
Modern Methods of Data Analysis - WS 07/08
 Modern Methods of Data Analysis Lecture XV (04.02.08) Contents: Function Minimization (see E. Lohrmann & V. Blobel) Optimization Problem Set of n independent variables Sometimes in addition some constraints
Modern Methods of Data Analysis Lecture XV (04.02.08) Contents: Function Minimization (see E. Lohrmann & V. Blobel) Optimization Problem Set of n independent variables Sometimes in addition some constraints
Preface. and Its Applications 81, ISBN , doi: / , Springer Science+Business Media New York, 2013.
 Preface This book is for all those interested in using the GAMS technology for modeling and solving complex, large-scale, continuous nonlinear optimization problems or applications. Mainly, it is a continuation
Preface This book is for all those interested in using the GAMS technology for modeling and solving complex, large-scale, continuous nonlinear optimization problems or applications. Mainly, it is a continuation
Solving Optimal Control Problems with ACADO Toolkit
 Solving Optimal Control Problems with ACADO Toolkit Boris Houska, Hans Joachim Ferreau, Moritz Diehl Electrical Engineering Department K.U. Leuven OPTEC Seminar, 2/9/2009 Electrical Engineering Department
Solving Optimal Control Problems with ACADO Toolkit Boris Houska, Hans Joachim Ferreau, Moritz Diehl Electrical Engineering Department K.U. Leuven OPTEC Seminar, 2/9/2009 Electrical Engineering Department
arxiv: v1 [math.oc] 2 Jul 2017
![arxiv: v1 [math.oc] 2 Jul 2017](/thumbs/72/67125582.jpg "arxiv: v1 [math.oc] 2 Jul 2017") Transcription Methods for Trajectory Optimization A beginners tutorial Matthew P. Kelly Cornell University mpk7@cornell.edu February 8, 5 arxiv:77.84v [math.oc] Jul 7 Abstract This report is an introduction
Transcription Methods for Trajectory Optimization A beginners tutorial Matthew P. Kelly Cornell University mpk7@cornell.edu February 8, 5 arxiv:77.84v [math.oc] Jul 7 Abstract This report is an introduction
Animation Lecture 10 Slide Fall 2003
 Animation Lecture 10 Slide 1 6.837 Fall 2003 Conventional Animation Draw each frame of the animation great control tedious Reduce burden with cel animation layer keyframe inbetween cel panoramas (Disney
Animation Lecture 10 Slide 1 6.837 Fall 2003 Conventional Animation Draw each frame of the animation great control tedious Reduce burden with cel animation layer keyframe inbetween cel panoramas (Disney
25. NLP algorithms. ˆ Overview. ˆ Local methods. ˆ Constrained optimization. ˆ Global methods. ˆ Black-box methods.
 CS/ECE/ISyE 524 Introduction to Optimization Spring 2017 18 25. NLP algorithms ˆ Overview ˆ Local methods ˆ Constrained optimization ˆ Global methods ˆ Black-box methods ˆ Course wrap-up Laurent Lessard
CS/ECE/ISyE 524 Introduction to Optimization Spring 2017 18 25. NLP algorithms ˆ Overview ˆ Local methods ˆ Constrained optimization ˆ Global methods ˆ Black-box methods ˆ Course wrap-up Laurent Lessard
Applied Lagrange Duality for Constrained Optimization
 Applied Lagrange Duality for Constrained Optimization Robert M. Freund February 10, 2004 c 2004 Massachusetts Institute of Technology. 1 1 Overview The Practical Importance of Duality Review of Convexity
Applied Lagrange Duality for Constrained Optimization Robert M. Freund February 10, 2004 c 2004 Massachusetts Institute of Technology. 1 1 Overview The Practical Importance of Duality Review of Convexity
Computational Optimization. Constrained Optimization Algorithms
 Computational Optimization Constrained Optimization Algorithms Same basic algorithms Repeat Determine descent direction Determine step size Take a step Until Optimal But now must consider feasibility,
Computational Optimization Constrained Optimization Algorithms Same basic algorithms Repeat Determine descent direction Determine step size Take a step Until Optimal But now must consider feasibility,
Constrained and Unconstrained Optimization
 Constrained and Unconstrained Optimization Carlos Hurtado Department of Economics University of Illinois at Urbana-Champaign hrtdmrt2@illinois.edu Oct 10th, 2017 C. Hurtado (UIUC - Economics) Numerical
Constrained and Unconstrained Optimization Carlos Hurtado Department of Economics University of Illinois at Urbana-Champaign hrtdmrt2@illinois.edu Oct 10th, 2017 C. Hurtado (UIUC - Economics) Numerical
Computational Methods. Constrained Optimization
 Computational Methods Constrained Optimization Manfred Huber 2010 1 Constrained Optimization Unconstrained Optimization finds a minimum of a function under the assumption that the parameters can take on
Computational Methods Constrained Optimization Manfred Huber 2010 1 Constrained Optimization Unconstrained Optimization finds a minimum of a function under the assumption that the parameters can take on
Linear methods for supervised learning
 Linear methods for supervised learning LDA Logistic regression Naïve Bayes PLA Maximum margin hyperplanes Soft-margin hyperplanes Least squares resgression Ridge regression Nonlinear feature maps Sometimes
Linear methods for supervised learning LDA Logistic regression Naïve Bayes PLA Maximum margin hyperplanes Soft-margin hyperplanes Least squares resgression Ridge regression Nonlinear feature maps Sometimes
Local and Global Minimum
 Local and Global Minimum Stationary Point. From elementary calculus, a single variable function has a stationary point at if the derivative vanishes at, i.e., 0. Graphically, the slope of the function
Local and Global Minimum Stationary Point. From elementary calculus, a single variable function has a stationary point at if the derivative vanishes at, i.e., 0. Graphically, the slope of the function
A Short SVM (Support Vector Machine) Tutorial
 Tutorial") A Short SVM (Support Vector Machine) Tutorial j.p.lewis CGIT Lab / IMSC U. Southern California version 0.zz dec 004 This tutorial assumes you are familiar with linear algebra and equality-constrained optimization/lagrange
A Short SVM (Support Vector Machine) Tutorial j.p.lewis CGIT Lab / IMSC U. Southern California version 0.zz dec 004 This tutorial assumes you are familiar with linear algebra and equality-constrained optimization/lagrange
Data Mining Chapter 8: Search and Optimization Methods Fall 2011 Ming Li Department of Computer Science and Technology Nanjing University
 Data Mining Chapter 8: Search and Optimization Methods Fall 2011 Ming Li Department of Computer Science and Technology Nanjing University Search & Optimization Search and Optimization method deals with
Data Mining Chapter 8: Search and Optimization Methods Fall 2011 Ming Li Department of Computer Science and Technology Nanjing University Search & Optimization Search and Optimization method deals with
Programs. Introduction
 16 Interior Point I: Linear Programs Lab Objective: For decades after its invention, the Simplex algorithm was the only competitive method for linear programming. The past 30 years, however, have seen
16 Interior Point I: Linear Programs Lab Objective: For decades after its invention, the Simplex algorithm was the only competitive method for linear programming. The past 30 years, however, have seen
Ellipsoid Algorithm :Algorithms in the Real World. Ellipsoid Algorithm. Reduction from general case
 Ellipsoid Algorithm 15-853:Algorithms in the Real World Linear and Integer Programming II Ellipsoid algorithm Interior point methods First polynomial-time algorithm for linear programming (Khachian 79)
Ellipsoid Algorithm 15-853:Algorithms in the Real World Linear and Integer Programming II Ellipsoid algorithm Interior point methods First polynomial-time algorithm for linear programming (Khachian 79)
Introduction to Linear Programming. Algorithmic and Geometric Foundations of Optimization
 Introduction to Linear Programming Algorithmic and Geometric Foundations of Optimization Optimization and Linear Programming Mathematical programming is a class of methods for solving problems which ask
Introduction to Linear Programming Algorithmic and Geometric Foundations of Optimization Optimization and Linear Programming Mathematical programming is a class of methods for solving problems which ask
Module 1 Lecture Notes 2. Optimization Problem and Model Formulation
 Optimization Methods: Introduction and Basic concepts 1 Module 1 Lecture Notes 2 Optimization Problem and Model Formulation Introduction In the previous lecture we studied the evolution of optimization
Optimization Methods: Introduction and Basic concepts 1 Module 1 Lecture Notes 2 Optimization Problem and Model Formulation Introduction In the previous lecture we studied the evolution of optimization
Convex Optimization. Lijun Zhang Modification of
 Convex Optimization Lijun Zhang zlj@nju.edu.cn http://cs.nju.edu.cn/zlj Modification of http://stanford.edu/~boyd/cvxbook/bv_cvxslides.pdf Outline Introduction Convex Sets & Functions Convex Optimization
Convex Optimization Lijun Zhang zlj@nju.edu.cn http://cs.nju.edu.cn/zlj Modification of http://stanford.edu/~boyd/cvxbook/bv_cvxslides.pdf Outline Introduction Convex Sets & Functions Convex Optimization
Lagrange multipliers. Contents. Introduction. From Wikipedia, the free encyclopedia
 Lagrange multipliers From Wikipedia, the free encyclopedia In mathematical optimization problems, Lagrange multipliers, named after Joseph Louis Lagrange, is a method for finding the local extrema of a
Lagrange multipliers From Wikipedia, the free encyclopedia In mathematical optimization problems, Lagrange multipliers, named after Joseph Louis Lagrange, is a method for finding the local extrema of a
Problem characteristics. Dynamic Optimization. Examples. Policies vs. Trajectories. Planning using dynamic optimization. Dynamic Optimization Issues
 Problem characteristics Planning using dynamic optimization Chris Atkeson 2004 Want optimal plan, not just feasible plan We will minimize a cost function C(execution). Some examples: C() = c T (x T ) +
Problem characteristics Planning using dynamic optimization Chris Atkeson 2004 Want optimal plan, not just feasible plan We will minimize a cost function C(execution). Some examples: C() = c T (x T ) +
Today. Golden section, discussion of error Newton s method. Newton s method, steepest descent, conjugate gradient
 Optimization Last time Root finding: definition, motivation Algorithms: Bisection, false position, secant, Newton-Raphson Convergence & tradeoffs Example applications of Newton s method Root finding in
Optimization Last time Root finding: definition, motivation Algorithms: Bisection, false position, secant, Newton-Raphson Convergence & tradeoffs Example applications of Newton s method Root finding in
Lecture VI: Constraints and Controllers. Parts Based on Erin Catto s Box2D Tutorial
 Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
A Brief Look at Optimization
 A Brief Look at Optimization CSC 412/2506 Tutorial David Madras January 18, 2018 Slides adapted from last year s version Overview Introduction Classes of optimization problems Linear programming Steepest
A Brief Look at Optimization CSC 412/2506 Tutorial David Madras January 18, 2018 Slides adapted from last year s version Overview Introduction Classes of optimization problems Linear programming Steepest
Panagiotis Tsiotras. Dynamics and Control Systems Laboratory Daniel Guggenheim School of Aerospace Engineering Georgia Institute of Technology
 Panagiotis Tsiotras Dynamics and Control Systems Laboratory Daniel Guggenheim School of Aerospace Engineering Georgia Institute of Technology ICRAT 12 Tutotial on Methods for Optimal Trajectory Design
Panagiotis Tsiotras Dynamics and Control Systems Laboratory Daniel Guggenheim School of Aerospace Engineering Georgia Institute of Technology ICRAT 12 Tutotial on Methods for Optimal Trajectory Design
5 Machine Learning Abstractions and Numerical Optimization
 Machine Learning Abstractions and Numerical Optimization 25 5 Machine Learning Abstractions and Numerical Optimization ML ABSTRACTIONS [some meta comments on machine learning] [When you write a large computer
Machine Learning Abstractions and Numerical Optimization 25 5 Machine Learning Abstractions and Numerical Optimization ML ABSTRACTIONS [some meta comments on machine learning] [When you write a large computer
CS 395T Lecture 12: Feature Matching and Bundle Adjustment. Qixing Huang October 10 st 2018
 CS 395T Lecture 12: Feature Matching and Bundle Adjustment Qixing Huang October 10 st 2018 Lecture Overview Dense Feature Correspondences Bundle Adjustment in Structure-from-Motion Image Matching Algorithm
CS 395T Lecture 12: Feature Matching and Bundle Adjustment Qixing Huang October 10 st 2018 Lecture Overview Dense Feature Correspondences Bundle Adjustment in Structure-from-Motion Image Matching Algorithm
Problem Set #3 (With Corrections)
") IC-32 Optimal Control Winter 2006 Benoît Chachuat ME C2 401, Ph: 33844, benoit.chachuat@epfl.ch Problem Set #3 (With Corrections) 1. Consider the following NLP problem: min x IR 3 f(x) := x2 1 + x 1 x
IC-32 Optimal Control Winter 2006 Benoît Chachuat ME C2 401, Ph: 33844, benoit.chachuat@epfl.ch Problem Set #3 (With Corrections) 1. Consider the following NLP problem: min x IR 3 f(x) := x2 1 + x 1 x
David G. Luenberger Yinyu Ye. Linear and Nonlinear. Programming. Fourth Edition. ö Springer
 David G. Luenberger Yinyu Ye Linear and Nonlinear Programming Fourth Edition ö Springer Contents 1 Introduction 1 1.1 Optimization 1 1.2 Types of Problems 2 1.3 Size of Problems 5 1.4 Iterative Algorithms
David G. Luenberger Yinyu Ye Linear and Nonlinear Programming Fourth Edition ö Springer Contents 1 Introduction 1 1.1 Optimization 1 1.2 Types of Problems 2 1.3 Size of Problems 5 1.4 Iterative Algorithms
Trajectory Optimization for. Robots
 LA (x0, U ; µ, ) = `f (xn ) + N X 1 2 k=0 N X1 `(xk, uk ) + k=0 Trajectory Optimization for @c(x, u) @c(x, u) ˆ Q =Q + I Underactuated @x @x (and other) @c(x, u) @c(x, u) ˆ =Q + Q I + I Robots @u @u c(xk,uk
LA (x0, U ; µ, ) = `f (xn ) + N X 1 2 k=0 N X1 `(xk, uk ) + k=0 Trajectory Optimization for @c(x, u) @c(x, u) ˆ Q =Q + I Underactuated @x @x (and other) @c(x, u) @c(x, u) ˆ =Q + Q I + I Robots @u @u c(xk,uk
OPTIMIZATION METHODS
 D. Nagesh Kumar Associate Professor Department of Civil Engineering, Indian Institute of Science, Bangalore - 50 0 Email : nagesh@civil.iisc.ernet.in URL: http://www.civil.iisc.ernet.in/~nagesh Brief Contents
D. Nagesh Kumar Associate Professor Department of Civil Engineering, Indian Institute of Science, Bangalore - 50 0 Email : nagesh@civil.iisc.ernet.in URL: http://www.civil.iisc.ernet.in/~nagesh Brief Contents
A FACTOR GRAPH APPROACH TO CONSTRAINED OPTIMIZATION. A Thesis Presented to The Academic Faculty. Ivan Dario Jimenez
 A FACTOR GRAPH APPROACH TO CONSTRAINED OPTIMIZATION A Thesis Presented to The Academic Faculty By Ivan Dario Jimenez In Partial Fulfillment of the Requirements for the Degree B.S. in Computer Science with
A FACTOR GRAPH APPROACH TO CONSTRAINED OPTIMIZATION A Thesis Presented to The Academic Faculty By Ivan Dario Jimenez In Partial Fulfillment of the Requirements for the Degree B.S. in Computer Science with
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Introduction to Multi-body Dynamics
 division Graduate Course ME 244) Tentative Draft Syllabus 1. Basic concepts in 3-D rigid-body mechanics 1. Rigid body vs flexible body 2. Spatial kinematics (3-D rotation transformations) and Euler theorem
division Graduate Course ME 244) Tentative Draft Syllabus 1. Basic concepts in 3-D rigid-body mechanics 1. Rigid body vs flexible body 2. Spatial kinematics (3-D rotation transformations) and Euler theorem
Convex Programs. COMPSCI 371D Machine Learning. COMPSCI 371D Machine Learning Convex Programs 1 / 21
 Convex Programs COMPSCI 371D Machine Learning COMPSCI 371D Machine Learning Convex Programs 1 / 21 Logistic Regression! Support Vector Machines Support Vector Machines (SVMs) and Convex Programs SVMs are
Convex Programs COMPSCI 371D Machine Learning COMPSCI 371D Machine Learning Convex Programs 1 / 21 Logistic Regression! Support Vector Machines Support Vector Machines (SVMs) and Convex Programs SVMs are
In other words, we want to find the domain points that yield the maximum or minimum values (extrema) of the function.
 of the function.") 1 The Lagrange multipliers is a mathematical method for performing constrained optimization of differentiable functions. Recall unconstrained optimization of differentiable functions, in which we want
1 The Lagrange multipliers is a mathematical method for performing constrained optimization of differentiable functions. Recall unconstrained optimization of differentiable functions, in which we want
A coupling of discrete and continuous optimization to solve kinodynamic motion planning problems 1
 A coupling of discrete and continuous optimization to solve kinodynamic motion planning problems 1 Chantal Landry Weierstrass Institute Mohrenstr. 39, 10117 Berlin, Germany chantal.landry@wias-berlin.de
A coupling of discrete and continuous optimization to solve kinodynamic motion planning problems 1 Chantal Landry Weierstrass Institute Mohrenstr. 39, 10117 Berlin, Germany chantal.landry@wias-berlin.de
Augmented Lagrangian Methods
 Augmented Lagrangian Methods Stephen J. Wright 1 2 Computer Sciences Department, University of Wisconsin-Madison. IMA, August 2016 Stephen Wright (UW-Madison) Augmented Lagrangian IMA, August 2016 1 /
Augmented Lagrangian Methods Stephen J. Wright 1 2 Computer Sciences Department, University of Wisconsin-Madison. IMA, August 2016 Stephen Wright (UW-Madison) Augmented Lagrangian IMA, August 2016 1 /
From Theory to Application (Optimization and Optimal Control in Space Applications)
") From Theory to Application (Optimization and Optimal Control in Space Applications) Christof Büskens Optimierung & Optimale Steuerung 02.02.2012 The paradox of mathematics If mathematics refer to reality,
From Theory to Application (Optimization and Optimal Control in Space Applications) Christof Büskens Optimierung & Optimale Steuerung 02.02.2012 The paradox of mathematics If mathematics refer to reality,
Virtual Manikin Controller Calculating the movement of a human model Master s thesis in Complex Adaptive Systems DANIEL GLEESON
 Virtual Manikin Controller Calculating the movement of a human model Master s thesis in Complex Adaptive Systems DANIEL GLEESON Department of Applied Mechanics Division of Vehicle Engineering and Autonomous
Virtual Manikin Controller Calculating the movement of a human model Master s thesis in Complex Adaptive Systems DANIEL GLEESON Department of Applied Mechanics Division of Vehicle Engineering and Autonomous
USING OPTIMIZATION TECHNIQUES FOR THE DESIGN AND CONTROL OF FAST BIPEDS
 1 USING OPTIMIZATION TECHNIQUES FOR THE DESIGN AND CONTROL OF FAST BIPEDS T. LUKSCH and K. BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, Germany E-mail: t.luksch@informatik.uni-kl.de
1 USING OPTIMIZATION TECHNIQUES FOR THE DESIGN AND CONTROL OF FAST BIPEDS T. LUKSCH and K. BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, Germany E-mail: t.luksch@informatik.uni-kl.de
Chapter Multidimensional Gradient Method
 Chapter 09.04 Multidimensional Gradient Method After reading this chapter, you should be able to: 1. Understand how multi-dimensional gradient methods are different from direct search methods. Understand
Chapter 09.04 Multidimensional Gradient Method After reading this chapter, you should be able to: 1. Understand how multi-dimensional gradient methods are different from direct search methods. Understand
Kinematics. Why inverse? The study of motion without regard to the forces that cause it. Forward kinematics. Inverse kinematics
 Kinematics Inverse kinematics The study of motion without regard to the forces that cause it Forward kinematics Given a joint configuration, what is the osition of an end oint on the structure? Inverse
Kinematics Inverse kinematics The study of motion without regard to the forces that cause it Forward kinematics Given a joint configuration, what is the osition of an end oint on the structure? Inverse
Demo 1: KKT conditions with inequality constraints
 MS-C5 Introduction to Optimization Solutions 9 Ehtamo Demo : KKT conditions with inequality constraints Using the Karush-Kuhn-Tucker conditions, see if the points x (x, x ) (, 4) or x (x, x ) (6, ) are
MS-C5 Introduction to Optimization Solutions 9 Ehtamo Demo : KKT conditions with inequality constraints Using the Karush-Kuhn-Tucker conditions, see if the points x (x, x ) (, 4) or x (x, x ) (6, ) are
Trajectory Optimization
 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Numerical Method in Optimization as a Multi-stage Decision Control System
 Numerical Method in Optimization as a Multi-stage Decision Control System B.S. GOH Institute of Mathematical Sciences University of Malaya 50603 Kuala Lumpur MLYSI gohoptimum@gmail.com bstract: - Numerical
Numerical Method in Optimization as a Multi-stage Decision Control System B.S. GOH Institute of Mathematical Sciences University of Malaya 50603 Kuala Lumpur MLYSI gohoptimum@gmail.com bstract: - Numerical
Advanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madras
 Advanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madras Lecture - 35 Quadratic Programming In this lecture, we continue our discussion on
Advanced Operations Research Prof. G. Srinivasan Department of Management Studies Indian Institute of Technology, Madras Lecture - 35 Quadratic Programming In this lecture, we continue our discussion on
Lecture Notes: Constraint Optimization
 Lecture Notes: Constraint Optimization Gerhard Neumann January 6, 2015 1 Constraint Optimization Problems In constraint optimization we want to maximize a function f(x) under the constraints that g i (x)
Lecture Notes: Constraint Optimization Gerhard Neumann January 6, 2015 1 Constraint Optimization Problems In constraint optimization we want to maximize a function f(x) under the constraints that g i (x)
Sequential Coordinate-wise Algorithm for Non-negative Least Squares Problem
 CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY Sequential Coordinate-wise Algorithm for Non-negative Least Squares Problem Woring document of the EU project COSPAL IST-004176 Vojtěch Franc, Miro
CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY Sequential Coordinate-wise Algorithm for Non-negative Least Squares Problem Woring document of the EU project COSPAL IST-004176 Vojtěch Franc, Miro
Characterizing Improving Directions Unconstrained Optimization
 Final Review IE417 In the Beginning... In the beginning, Weierstrass's theorem said that a continuous function achieves a minimum on a compact set. Using this, we showed that for a convex set S and y not
Final Review IE417 In the Beginning... In the beginning, Weierstrass's theorem said that a continuous function achieves a minimum on a compact set. Using this, we showed that for a convex set S and y not
PRIMAL-DUAL INTERIOR POINT METHOD FOR LINEAR PROGRAMMING. 1. Introduction
 PRIMAL-DUAL INTERIOR POINT METHOD FOR LINEAR PROGRAMMING KELLER VANDEBOGERT AND CHARLES LANNING 1. Introduction Interior point methods are, put simply, a technique of optimization where, given a problem
PRIMAL-DUAL INTERIOR POINT METHOD FOR LINEAR PROGRAMMING KELLER VANDEBOGERT AND CHARLES LANNING 1. Introduction Interior point methods are, put simply, a technique of optimization where, given a problem
New features in dynamic optimization with EcosimPro
 Journal of Engineering and Technology for Industrial Applications, 2018. Edition. 13.Vol: 04 https://www.itegam-jetia.org ISSN ONLINE: 2447-0228 DOI: https://dx.doi.org/10.5935/2447-0228.20180001 New features
Journal of Engineering and Technology for Industrial Applications, 2018. Edition. 13.Vol: 04 https://www.itegam-jetia.org ISSN ONLINE: 2447-0228 DOI: https://dx.doi.org/10.5935/2447-0228.20180001 New features
A convex, smooth and invertible contact model for trajectory optimization
 A convex, smooth and invertible contact model for trajectory optimization Emanuel Todorov Departments of Applied Mathematics and Computer Science and Engineering University of Washington Abstract Trajectory
A convex, smooth and invertible contact model for trajectory optimization Emanuel Todorov Departments of Applied Mathematics and Computer Science and Engineering University of Washington Abstract Trajectory
Parameter Estimation in Differential Equations: A Numerical Study of Shooting Methods
 Parameter Estimation in Differential Equations: A Numerical Study of Shooting Methods Franz Hamilton Faculty Advisor: Dr Timothy Sauer January 5, 2011 Abstract Differential equation modeling is central
Parameter Estimation in Differential Equations: A Numerical Study of Shooting Methods Franz Hamilton Faculty Advisor: Dr Timothy Sauer January 5, 2011 Abstract Differential equation modeling is central
Sensitivity computation based on CasADi for dynamic optimization problems
 Sensitivity computation based on CasADi for dynamic optimization problems 16 th European Workshop on Automatic Differentiation 8 9 December 2014, Jena, Germany Evgeny Lazutkin, Abebe Geletu, Siegbert Hopfgarten,
Sensitivity computation based on CasADi for dynamic optimization problems 16 th European Workshop on Automatic Differentiation 8 9 December 2014, Jena, Germany Evgeny Lazutkin, Abebe Geletu, Siegbert Hopfgarten,
Augmented Lagrangian Methods
 Augmented Lagrangian Methods Mário A. T. Figueiredo 1 and Stephen J. Wright 2 1 Instituto de Telecomunicações, Instituto Superior Técnico, Lisboa, Portugal 2 Computer Sciences Department, University of
Augmented Lagrangian Methods Mário A. T. Figueiredo 1 and Stephen J. Wright 2 1 Instituto de Telecomunicações, Instituto Superior Técnico, Lisboa, Portugal 2 Computer Sciences Department, University of
Convex Optimization and Machine Learning
 Convex Optimization and Machine Learning Mengliu Zhao Machine Learning Reading Group School of Computing Science Simon Fraser University March 12, 2014 Mengliu Zhao SFU-MLRG March 12, 2014 1 / 25 Introduction
Convex Optimization and Machine Learning Mengliu Zhao Machine Learning Reading Group School of Computing Science Simon Fraser University March 12, 2014 Mengliu Zhao SFU-MLRG March 12, 2014 1 / 25 Introduction
Introduction to optimization methods and line search
 Introduction to optimization methods and line search Jussi Hakanen Post-doctoral researcher jussi.hakanen@jyu.fi How to find optimal solutions? Trial and error widely used in practice, not efficient and
Introduction to optimization methods and line search Jussi Hakanen Post-doctoral researcher jussi.hakanen@jyu.fi How to find optimal solutions? Trial and error widely used in practice, not efficient and
Recent developments in simulation, optimization and control of flexible multibody systems
 Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Structure and Synthesis of Robot Motion
 Structure and Synthesis of Robot Motion Dynamics: Constraints, Continua, etc. Subramanian Ramamoorthy School of Informatics 5 February, 2009 Recap Last time, we discussed two major approaches to describing
Structure and Synthesis of Robot Motion Dynamics: Constraints, Continua, etc. Subramanian Ramamoorthy School of Informatics 5 February, 2009 Recap Last time, we discussed two major approaches to describing
Dynamic Optimization in JModelica.org
 Dynamic Optimization in JModelica.org Magnusson, Fredrik; Åkesson, Johan Published in: Processes DOI: 10.3390/pr3020471 2015 Document Version: Publisher's PDF, also known as Version of record Link to publication
Dynamic Optimization in JModelica.org Magnusson, Fredrik; Åkesson, Johan Published in: Processes DOI: 10.3390/pr3020471 2015 Document Version: Publisher's PDF, also known as Version of record Link to publication
CS205b/CME306. Lecture 9
 CS205b/CME306 Lecture 9 1 Convection Supplementary Reading: Osher and Fedkiw, Sections 3.3 and 3.5; Leveque, Sections 6.7, 8.3, 10.2, 10.4. For a reference on Newton polynomial interpolation via divided
CS205b/CME306 Lecture 9 1 Convection Supplementary Reading: Osher and Fedkiw, Sections 3.3 and 3.5; Leveque, Sections 6.7, 8.3, 10.2, 10.4. For a reference on Newton polynomial interpolation via divided
SIMULTANEOUS PERTURBATION STOCHASTIC APPROXIMATION FOR REAL-TIME OPTIMIZATION OF MODEL PREDICTIVE CONTROL
 SIMULTANEOUS PERTURBATION STOCHASTIC APPROXIMATION FOR REAL-TIME OPTIMIZATION OF MODEL PREDICTIVE CONTROL Irina Baltcheva Felisa J.Vázquez-Abad ½ (member of GERAD) Université de Montréal DIRO, CP 6128
SIMULTANEOUS PERTURBATION STOCHASTIC APPROXIMATION FOR REAL-TIME OPTIMIZATION OF MODEL PREDICTIVE CONTROL Irina Baltcheva Felisa J.Vázquez-Abad ½ (member of GERAD) Université de Montréal DIRO, CP 6128
VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G.
 VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G. Satheesh Kumar, Y. G. Srinivasa and T. Nagarajan Precision Engineering and Instrumentation Laboratory Department of Mechanical Engineering Indian
VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G. Satheesh Kumar, Y. G. Srinivasa and T. Nagarajan Precision Engineering and Instrumentation Laboratory Department of Mechanical Engineering Indian
Lecture VI: Constraints and Controllers
 Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Introduction to Constrained Optimization
 Introduction to Constrained Optimization Duality and KKT Conditions Pratik Shah {pratik.shah [at] lnmiit.ac.in} The LNM Institute of Information Technology www.lnmiit.ac.in February 13, 2013 LNMIIT MLPR
Introduction to Constrained Optimization Duality and KKT Conditions Pratik Shah {pratik.shah [at] lnmiit.ac.in} The LNM Institute of Information Technology www.lnmiit.ac.in February 13, 2013 LNMIIT MLPR
Can we quantify the hardness of learning manipulation? Kris Hauser Department of Electrical and Computer Engineering Duke University
 Can we quantify the hardness of learning manipulation? Kris Hauser Department of Electrical and Computer Engineering Duke University Robot Learning! Robot Learning! Google used 14 identical robots 800,000
Can we quantify the hardness of learning manipulation? Kris Hauser Department of Electrical and Computer Engineering Duke University Robot Learning! Robot Learning! Google used 14 identical robots 800,000
15.082J and 6.855J. Lagrangian Relaxation 2 Algorithms Application to LPs
 15.082J and 6.855J Lagrangian Relaxation 2 Algorithms Application to LPs 1 The Constrained Shortest Path Problem (1,10) 2 (1,1) 4 (2,3) (1,7) 1 (10,3) (1,2) (10,1) (5,7) 3 (12,3) 5 (2,2) 6 Find the shortest
15.082J and 6.855J Lagrangian Relaxation 2 Algorithms Application to LPs 1 The Constrained Shortest Path Problem (1,10) 2 (1,1) 4 (2,3) (1,7) 1 (10,3) (1,2) (10,1) (5,7) 3 (12,3) 5 (2,2) 6 Find the shortest
Convex Optimization CMU-10725
 Convex Optimization CMU-10725 Conjugate Direction Methods Barnabás Póczos & Ryan Tibshirani Conjugate Direction Methods 2 Books to Read David G. Luenberger, Yinyu Ye: Linear and Nonlinear Programming Nesterov:
Convex Optimization CMU-10725 Conjugate Direction Methods Barnabás Póczos & Ryan Tibshirani Conjugate Direction Methods 2 Books to Read David G. Luenberger, Yinyu Ye: Linear and Nonlinear Programming Nesterov:
Interior Point I. Lab 21. Introduction
 Lab 21 Interior Point I Lab Objective: For decades after its invention, the Simplex algorithm was the only competitive method for linear programming. The past 30 years, however, have seen the discovery
Lab 21 Interior Point I Lab Objective: For decades after its invention, the Simplex algorithm was the only competitive method for linear programming. The past 30 years, however, have seen the discovery
Robot Mapping. TORO Gradient Descent for SLAM. Cyrill Stachniss
 Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
ACADO TOOLKIT - AUTOMATIC CONTROL AND DYNAMIC OPTIMIZATION
 ACADO Toolkit - Automatic Control and Dynamic Optimization p. 1/24 ACADO TOOLKIT - AUTOMATIC CONTROL AND DYNAMIC OPTIMIZATION Moritz Diehl, Boris Houska, Hans Joachim Ferreau Optimization in Engineering
ACADO Toolkit - Automatic Control and Dynamic Optimization p. 1/24 ACADO TOOLKIT - AUTOMATIC CONTROL AND DYNAMIC OPTIMIZATION Moritz Diehl, Boris Houska, Hans Joachim Ferreau Optimization in Engineering
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Lagrangian Relaxation: An overview
 Discrete Math for Bioinformatics WS 11/12:, by A. Bockmayr/K. Reinert, 22. Januar 2013, 13:27 4001 Lagrangian Relaxation: An overview Sources for this lecture: D. Bertsimas and J. Tsitsiklis: Introduction
Discrete Math for Bioinformatics WS 11/12:, by A. Bockmayr/K. Reinert, 22. Januar 2013, 13:27 4001 Lagrangian Relaxation: An overview Sources for this lecture: D. Bertsimas and J. Tsitsiklis: Introduction
CS321 Introduction To Numerical Methods
 CS3 Introduction To Numerical Methods Fuhua (Frank) Cheng Department of Computer Science University of Kentucky Lexington KY 456-46 - - Table of Contents Errors and Number Representations 3 Error Types
CS3 Introduction To Numerical Methods Fuhua (Frank) Cheng Department of Computer Science University of Kentucky Lexington KY 456-46 - - Table of Contents Errors and Number Representations 3 Error Types
arxiv: v2 [math.oc] 12 Feb 2019
![arxiv: v2 [math.oc] 12 Feb 2019](/thumbs/88/116293924.jpg "arxiv: v2 [math.oc] 12 Feb 2019") A CENTRAL PATH FOLLOWING METHOD USING THE NORMALIZED GRADIENTS Long Chen 1, Wenyi Chen 2, and Kai-Uwe Bletzinger 1 arxiv:1902.04040v2 [math.oc] 12 Feb 2019 1 Chair of Structural Analysis, Technical University
A CENTRAL PATH FOLLOWING METHOD USING THE NORMALIZED GRADIENTS Long Chen 1, Wenyi Chen 2, and Kai-Uwe Bletzinger 1 arxiv:1902.04040v2 [math.oc] 12 Feb 2019 1 Chair of Structural Analysis, Technical University