KINEMATICS FOR ANIMATION. Rémi Ronfard, Animation, M2R MOSIG
|
|
|
- Gerard Warren
- 6 years ago
- Views:
Transcription
1 KINEMATICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG
2 Direct and inverse kinematics in animation Fast numerical methods for inverse kinematics by Bill Baxter My Adventures with Inverse Kinematics by Chris Hecker


3 Fast numerical methods for inverse kinematics by Bill Baxter


4 Fast numerical methods for inverse kinematics by Bill Baxter


5 Fast numerical methods for inverse kinematics by Bill Baxter


6 Fast numerical methods for inverse kinematics by Bill Baxter


7 Fast numerical methods for inverse kinematics by Bill Baxter


8 Fast numerical methods for inverse kinematics by Bill Baxter


9 Fast numerical methods for inverse kinematics by Bill Baxter
10 Fast numerical methods for inverse kinematics by Bill Baxter


11 Fast numerical methods for inverse kinematics by Bill Baxter


12 Fast numerical methods for inverse kinematics by Bill Baxter


13 Fast numerical methods for inverse kinematics by Bill Baxter


14 Fast numerical methods for inverse kinematics by Bill Baxter


15 Fast numerical methods for inverse kinematics by Bill Baxter


16 Fast numerical methods for inverse kinematics by Bill Baxter


17 Fast numerical methods for inverse kinematics by Bill Baxter
18

19


20 My Adventure with Inverse Kinematics Chris Hecker definition six, inc.
21 What is this lecture about? the path I took while solving a problem with inverse kinematics how I use math to model and [sometimes] solve problems decisions I made, both good and bad learn from my successes and failures work in progress!
22 What isn t this lecture about? not an IK tutorial or introduction not going to give you the One True Way to do IK has nothing to do with graphics not about my rock climbing game
23 Takeaway You will get insight into how IK on a whole human body is different from IK on a single arm. You will see how IK is a building block, but not a complete solution to character animation.
24 Prerequisites must be very comfortable with math doesn t mean you know tons of math does mean you follow quickly and aren t afraid of it probably best if you ve implemented a simple IK system foot placement, arm grabbing door, etc.
25 Talk Structure (linear with occasional branches)... attempted solution problem statement and discussion related theory attempted solution problem statement and discussion related theory...
26 Problem: How to move a guy with the mouse? move like a [rock climbing] human interactive direct body/limb control did not want to use physics
27 Theory: How to move a guy with the mouse? inverse kinematics vs. forward kinematics FK: p=f(q) IK: q = f -1 (p) p = (x, y) q = (θ 1, θ 2 ) p θ 2 g p is Euclidean, angles q is configuration space θ 1
28 Theory: How to move a guy with the mouse? (cont.) degrees of freedom (DOF) n incredibly important concept ways in which system can change n configuration space find DOF of system to understand it control & constrain DOF to control it examples n physical system, polynomial, etc. fundamental task of IK is to control degrees of freedom to attain goal p θ 1 p = (x, y) q = (θ 1, θ 2 ) θ 2
29 Solution: How to move a guy with the mouse? analytical IK invert p = f(q) to get q from p relatively easy for the 2D arm inverse trig, some vector algebra gets complicated as n increases
30 Problem: Analytical IK can t handle human. human has lots of DOF even 2D arm with shoulder has more DOF than needed to reach goal θ 3 θ 2 p g solving p = f(q) requires certain characteristics θ 1 p = (x, y) q = (θ 1, θ 2, θ 3 )
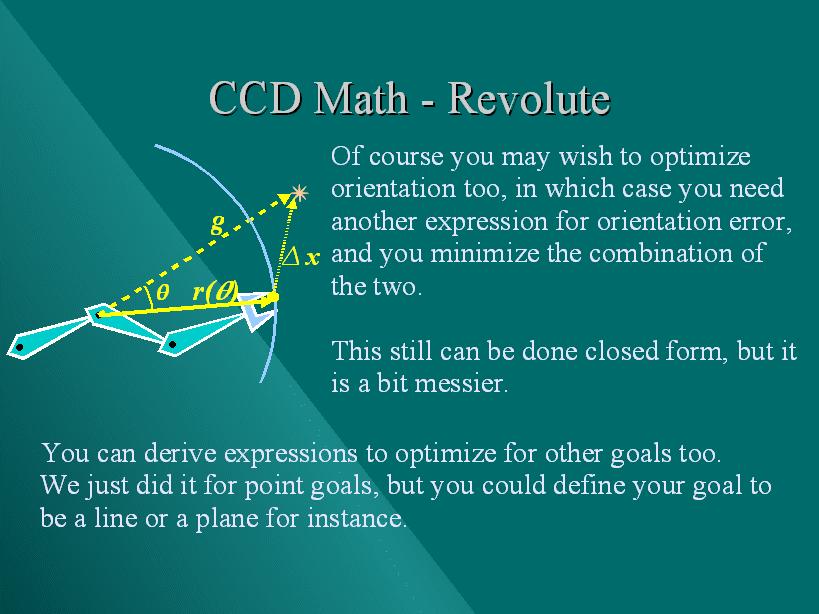
31 Theory: Analytical IK can t handle human. p = f(q) is a set of nonlinear equations generally no closed forms must iterate numerically θ 3 p must be square, n DOF = n goal over-, under-constrained system redundant manipulator ex. human reaching for point and/or orientation vast literature on solving f(q) = p θ 1 θ 2 p = (x, y) q = (θ 1, θ 2, θ 3 )
32 Solution: Analytical IK can t handle human. use Cyclic Coordinate Descent (CCD) to solve arms iterative, recursive position-space algorithm fast, easy, robust start from last position n not path independent, but faster I draw every outside iteration n looks like animation, but it s not θ 3 θ 1 θ 2 p = (x, y) q = (θ 1, θ 2, θ 3 ) p g
33 Problem: CCD only handles serial chains. multiple goals are necessary for human stack up vectors in p=f(q) coupled at branches g 2 θ 5 p 2 θ 3 θ 4 θ 2 θ 1 p 1 g 1 p = (x 1, y 1, x 2, y 2 ) q = (θ 1, θ 2, θ 3, θ 4, θ 5 )
34 Theory: CCD only handles serial chains. coupling between goals either solvable alone, neither solvable together how to distribute desired-angle error? g 2 θ 5 p 2 θ 4 θ 3 θ 1 θ 2 p = (x 1, y 1, x 2, y 2 ) q = (θ 1, θ 2, θ 3, θ 4, θ 5 ) p 1 g 1
35 Solution: CCD only handles serial chains. simply average desired angles at branch parents to attain multiple goals and distribute error θ 5 p 2 θ 4 θ 3 θ 2 p 1 θ 1 in example, imagine p 1, p 2 pulled in opposite directions θ 1 p = (x 1, y 1, x 2, y 2 ) q = (θ 1, θ 2, θ 3, θ 4, θ 5 )
36 Problem: Drift on multiple goals. average can t satisfy all goals or even prioritize them I specifically want to drag climber hand with mouse and have other end effectors stay on holds θ
37 Theory: Drift on multiple goals. want a rigid constraint at end effectors closed loops are hard, CCD doesn t handle them, nor do common IK algorithms must solve simultaneously not hierarchical anymore closed loops don t have local behavior θ
38 Solution: Drift on multiple goals. attempt to Gram-Schmidt off any movement that would result in error b c a
39 Problem: Gram-Schmidt removes the wrong direction sometimes. could have tried real Jacobian force mapping Gram-Schmidt
40 Problem: Human is not rooted tree. Which end effector (hand, foot) is the root? There is no persistent fixed root in a rock climber or walking person CCD must start at a fixed root
41 Theory: Human is not rooted tree. switching root is basically a datastructure problem relative angles must change joint limits (see below) behavior will change slightly as well, since CCD isn t symmetric with respect to the root
42 Solution: Human is not rooted tree. just type it in invert tree to new root Caml is pretty good at this sort of thing see last year s GDC talk dragging torso is done by inverting to a torso node, then changing the root position the hands and feet are all end-effectors hack!
43 Problem: Joint limits elbow can t bend backwards should lend believability and intuition
44 Theory: Joint limits inequality constraints: θ θ min abandon all (most) hope of analytical solution these inequalities are axis aligned planes in configuration space θ max θ θ min
45 Solution: Joint limits CCD makes parent-child limits easy do min/max clamp in CCD inner iteration easy, and rest of system compensates issue: CCD doesn t know about the joint limits often compensates, but doesn t know to avoid them
46 Problem: Child-child limits parent-child not enough with moving root pelvis example: left foot root right foot root chest root
47 Problem: Child-child limits parent-child not enough with moving root pelvis example: left foot root right foot root chest root
48 Problem: Child-child limits parent-child not enough with moving root pelvis example: left foot root right foot root chest root?
49 Theory: Child-child limits both angles are dependent on each other, coupled parent is fixed in CCD constraints are now non-axis aligned planes in C-space simultaneous solution necessary at branches with child-child limits
50 Solution: Child-child limits Good solution should: satisfy constraints always have zero error in goals if possible have least squares error if not possible Nonlinear Least Squares with Linear Inequalities: minimize (θ 1 - d 1 ) 2 + (θ 2 - d 2 ) 2 w.r.t. θ min12 θ 1 - θ 2 θ max12 lots of literature on NLSLI I convert to LCP and use Lemke s algorithm works great!
51 Accomplishments We extended CCD to handle: multiple end effector goals dynamically changing root node arbitrary joint limits
52 Problems drift on multi-goals is still a problem CCD doesn t know about joint limits sometimes non-physical movement CCD isn t doing physics, not conserving energy, or anything else for that matter rooted hierarchies are inconvenient how to control redundant DOF?
53 Body Knowledge System system to manage movement and keep it natural situation & reaction ex. joint limits handled in body knowledge huge rules system allocates redundant DOF this is the key to natural movement!
54 Body Knowledge System (cont.) IK just a rough initial guess for body knowledge system; should be: physically plausible n no added energy, etc. easy to layer conflicting goals able to cope with over-constrained goals don t know enough about this yet, but I think it will be more important than IK for good dynamic animation
55 What I Didn t Talk About development process stuff developing on lower dimensional subproblems using visualizations to help debug math Mathematica and Matlab for development and debugging running multiple techniques on top of each other physics-based techniques I tried
56 What I Didn t Try I should have done a weighted average based on error for multi-goals, duh. even weighted average wouldn t be rigid n although could make weight very big... n similar to a stiff system Wrong: CCD must have fixed root now that I understand better, this isn t actualy true n the root s position is just more DOF n CCD probably wouldn t deal with this very well?
57 What I Didn t Try (cont.) pseudo-inverse methods n give explicit control over redundant DOF data-based methods (model-based) n functions as lookup tables totally ad-hoc methods
Articulated Characters
 Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Kinematics and Orientations
 Kinematics and Orientations Hierarchies Forward Kinematics Transformations (review) Euler angles Quaternions Yaw and evaluation function for assignment 2 Building a character Just translate, rotate, and
Kinematics and Orientations Hierarchies Forward Kinematics Transformations (review) Euler angles Quaternions Yaw and evaluation function for assignment 2 Building a character Just translate, rotate, and
Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018
 CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018") Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018 Welman, 1993 Inverse Kinematics and Geometric Constraints for Articulated Figure Manipulation, Chris
Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018 Welman, 1993 Inverse Kinematics and Geometric Constraints for Articulated Figure Manipulation, Chris
Computer Animation. Rick Parent
 Algorithms and Techniques Kinematic Linkages Hierarchical Modeling Relative motion Parent-child relationship Simplifies motion specification Constrains motion Reduces dimensionality Modeling & animating
Algorithms and Techniques Kinematic Linkages Hierarchical Modeling Relative motion Parent-child relationship Simplifies motion specification Constrains motion Reduces dimensionality Modeling & animating
SM2231 :: 3D Animation I :: Basic. Rigging
 SM2231 :: 3D Animation I :: Basic Rigging Object arrangements Hierarchical Hierarchical Separate parts arranged in a hierarchy can be animated without a skeleton Flat Flat Flat hierarchy is usually preferred,
SM2231 :: 3D Animation I :: Basic Rigging Object arrangements Hierarchical Hierarchical Separate parts arranged in a hierarchy can be animated without a skeleton Flat Flat Flat hierarchy is usually preferred,
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute What are the DH parameters for describing the relative pose of the two frames?
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute What are the DH parameters for describing the relative pose of the two frames?
BONE CONTROLLER ASSET VERSION 0.1 REV 1
 Foreword Thank you for purchasing the Bone Controller! I m an independent developer and your feedback and support really means a lot to me. Please don t ever hesitate to contact me if you have a question,
Foreword Thank you for purchasing the Bone Controller! I m an independent developer and your feedback and support really means a lot to me. Please don t ever hesitate to contact me if you have a question,
Maya Lesson 8 Notes - Animated Adjustable Desk Lamp
 Maya Lesson 8 Notes - Animated Adjustable Desk Lamp To Model the Lamp: 1. Research: Google images - adjustable desk lamp. 2. Print several images of lamps for ideas to model. 3. Make a sketch of the lamp
Maya Lesson 8 Notes - Animated Adjustable Desk Lamp To Model the Lamp: 1. Research: Google images - adjustable desk lamp. 2. Print several images of lamps for ideas to model. 3. Make a sketch of the lamp
CS-184: Computer Graphics. Today. Forward kinematics Inverse kinematics. Wednesday, November 12, Pin joints Ball joints Prismatic joints
 CS-184: Computer Graphics Lecture #18: Forward and Prof. James O Brien University of California, Berkeley V2008-F-18-1.0 1 Today Forward kinematics Inverse kinematics Pin joints Ball joints Prismatic joints
CS-184: Computer Graphics Lecture #18: Forward and Prof. James O Brien University of California, Berkeley V2008-F-18-1.0 1 Today Forward kinematics Inverse kinematics Pin joints Ball joints Prismatic joints
4 Kinematic Linkages. Chapter 4. Kinematic Linkages. Department of Computer Science and Engineering 4-1
 Kinematic Linkages 4-1 Introduction In describing an object s motion, it is often useful to relate it to another object. Consider, for eample a coordinate system centered at our sun in which the moon s
Kinematic Linkages 4-1 Introduction In describing an object s motion, it is often useful to relate it to another object. Consider, for eample a coordinate system centered at our sun in which the moon s
autorob.github.io Inverse Kinematics UM EECS 398/598 - autorob.github.io
 autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
Kinematics. CS 448D: Character Animation Prof. Vladlen Koltun Stanford University
 Kinematics CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Kinematics Kinematics: The science of pure motion, considered without reference to the matter of objects moved, or to the
Kinematics CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Kinematics Kinematics: The science of pure motion, considered without reference to the matter of objects moved, or to the
CS 231. Inverse Kinematics Intro to Motion Capture. 3D characters. Representation. 1) Skeleton Origin (root) Joint centers/ bones lengths
 Skeleton Origin (root) Joint centers/ bones lengths") CS Inverse Kinematics Intro to Motion Capture Representation D characters ) Skeleton Origin (root) Joint centers/ bones lengths ) Keyframes Pos/Rot Root (x) Joint Angles (q) Kinematics study of static
CS Inverse Kinematics Intro to Motion Capture Representation D characters ) Skeleton Origin (root) Joint centers/ bones lengths ) Keyframes Pos/Rot Root (x) Joint Angles (q) Kinematics study of static
Kinematics: Intro. Kinematics is study of motion
 Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
IntroductionToRobotics-Lecture02
 IntroductionToRobotics-Lecture02 Instructor (Oussama Khatib):Okay. Let's get started. So as always, the lecture starts with a video segment, and today's video segment comes from 1991, and from the group
IntroductionToRobotics-Lecture02 Instructor (Oussama Khatib):Okay. Let's get started. So as always, the lecture starts with a video segment, and today's video segment comes from 1991, and from the group
TIEA311 Tietokonegrafiikan perusteet kevät 2018
 TIEA311 Tietokonegrafiikan perusteet kevät 2018 ( Principles of Computer Graphics Spring 2018) Copyright and Fair Use Notice: The lecture videos of this course are made available for registered students
TIEA311 Tietokonegrafiikan perusteet kevät 2018 ( Principles of Computer Graphics Spring 2018) Copyright and Fair Use Notice: The lecture videos of this course are made available for registered students
Animator Friendly Rigging Part 3b
 Animator Friendly Rigging Part 3b Creating animation rigs which solve problems, are fun to use, and don t cause nervous breakdowns. - 1- CONTENTS Biped Arms... 6 Why Are Arms Important?... 7 Requirements
Animator Friendly Rigging Part 3b Creating animation rigs which solve problems, are fun to use, and don t cause nervous breakdowns. - 1- CONTENTS Biped Arms... 6 Why Are Arms Important?... 7 Requirements
CS 231. Inverse Kinematics Intro to Motion Capture
 CS 231 Inverse Kinematics Intro to Motion Capture Representation 1) Skeleton Origin (root) Joint centers/ bones lengths 2) Keyframes Pos/Rot Root (x) Joint Angles (q) 3D characters Kinematics study of
CS 231 Inverse Kinematics Intro to Motion Capture Representation 1) Skeleton Origin (root) Joint centers/ bones lengths 2) Keyframes Pos/Rot Root (x) Joint Angles (q) 3D characters Kinematics study of
Lecture 3: Linear Classification
 Lecture 3: Linear Classification Roger Grosse 1 Introduction Last week, we saw an example of a learning task called regression. There, the goal was to predict a scalar-valued target from a set of features.
Lecture 3: Linear Classification Roger Grosse 1 Introduction Last week, we saw an example of a learning task called regression. There, the goal was to predict a scalar-valued target from a set of features.
Control of industrial robots. Kinematic redundancy
 Control of industrial robots Kinematic redundancy Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Kinematic redundancy Direct kinematics
Control of industrial robots Kinematic redundancy Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Kinematic redundancy Direct kinematics
Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps
 Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps Oliver Cardwell, Ramakrishnan Mukundan Department of Computer Science and Software Engineering University of Canterbury
Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps Oliver Cardwell, Ramakrishnan Mukundan Department of Computer Science and Software Engineering University of Canterbury
Triangulation: A new algorithm for Inverse Kinematics
 Triangulation: A new algorithm for Inverse Kinematics R. Müller-Cajar 1, R. Mukundan 1, 1 University of Canterbury, Dept. Computer Science & Software Engineering. Email: rdc32@student.canterbury.ac.nz
Triangulation: A new algorithm for Inverse Kinematics R. Müller-Cajar 1, R. Mukundan 1, 1 University of Canterbury, Dept. Computer Science & Software Engineering. Email: rdc32@student.canterbury.ac.nz
Lecture 18 Kinematic Chains
 CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
Lecture VI: Constraints and Controllers. Parts Based on Erin Catto s Box2D Tutorial
 Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
CS 775: Advanced Computer Graphics. Lecture 3 : Kinematics
 CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
#$ % $ $& "$%% " $ '$ " '
 ! " This section of the course covers techniques for pairwise (i.e., scanto-scan) and global (i.e., involving more than 2 scans) alignment, given that the algorithms are constrained to obtain a rigid-body
! " This section of the course covers techniques for pairwise (i.e., scanto-scan) and global (i.e., involving more than 2 scans) alignment, given that the algorithms are constrained to obtain a rigid-body
2D/3D Geometric Transformations and Scene Graphs
 2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Research Subject. Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group)
") Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Use of multilayer perceptrons as Inverse Kinematics solvers
 Use of multilayer perceptrons as Inverse Kinematics solvers Nathan Mitchell University of Wisconsin, Madison December 14, 2010 1 of 12 Introduction 1. Scope 2. Background 3. Methodology 4. Expected Results
Use of multilayer perceptrons as Inverse Kinematics solvers Nathan Mitchell University of Wisconsin, Madison December 14, 2010 1 of 12 Introduction 1. Scope 2. Background 3. Methodology 4. Expected Results
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
/633 Introduction to Algorithms Lecturer: Michael Dinitz Topic: Priority Queues / Heaps Date: 9/27/17
 01.433/33 Introduction to Algorithms Lecturer: Michael Dinitz Topic: Priority Queues / Heaps Date: 9/2/1.1 Introduction In this lecture we ll talk about a useful abstraction, priority queues, which are
01.433/33 Introduction to Algorithms Lecturer: Michael Dinitz Topic: Priority Queues / Heaps Date: 9/2/1.1 Introduction In this lecture we ll talk about a useful abstraction, priority queues, which are
Optimization of a two-link Robotic Manipulator
 Optimization of a two-link Robotic Manipulator Zachary Renwick, Yalım Yıldırım April 22, 2016 Abstract Although robots are used in many processes in research and industry, they are generally not customized
Optimization of a two-link Robotic Manipulator Zachary Renwick, Yalım Yıldırım April 22, 2016 Abstract Although robots are used in many processes in research and industry, they are generally not customized
animation projects in digital art animation 2009 fabio pellacini 1
 animation projects in digital art animation 2009 fabio pellacini 1 animation shape specification as a function of time projects in digital art animation 2009 fabio pellacini 2 how animation works? flip
animation projects in digital art animation 2009 fabio pellacini 1 animation shape specification as a function of time projects in digital art animation 2009 fabio pellacini 2 how animation works? flip
Last Time? Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
The University of Missouri - Columbia Electrical & Computer Engineering Department EE4330 Robotic Control and Intelligence
 The University of Missouri - Columbia Final Exam 1) Clear your desk top of all handwritten papers and personal notes. You may keep only your textbook, a cheat sheet, the test paper, a calculator and a
The University of Missouri - Columbia Final Exam 1) Clear your desk top of all handwritten papers and personal notes. You may keep only your textbook, a cheat sheet, the test paper, a calculator and a
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Announcements: Quiz. Animation, Motion Capture, & Inverse Kinematics. Last Time? Today: How do we Animate? Keyframing. Procedural Animation
 Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Advanced Graphics and Animation
 Advanced Graphics and Animation Character Marco Gillies and Dan Jones Goldsmiths Aims and objectives By the end of the lecture you will be able to describe How 3D characters are animated Skeletal animation
Advanced Graphics and Animation Character Marco Gillies and Dan Jones Goldsmiths Aims and objectives By the end of the lecture you will be able to describe How 3D characters are animated Skeletal animation
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics. Velocity Interpolation. Handing Free Surface with MAC
 Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
Lecture VI: Constraints and Controllers
 Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Animation, Motion Capture, & Inverse Kinematics. Announcements: Quiz
 Animation, Motion Capture, & Inverse Kinematics Announcements: Quiz On Tuesday (3/10), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Animation, Motion Capture, & Inverse Kinematics Announcements: Quiz On Tuesday (3/10), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Motion Capture & Simulation
 Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
CNM 190 Advanced Digital Animation Lec 10 : Inverse Kinematics & Automating Animation
 A ski-jumping Luxo, Jr.. from Spacetime Constraints, 1988 CNM 190 Advanced Digital Animation Lec 10 : Inverse Kinematics & Automating Animation Dan Garcia,, EECS (co-instructor) Greg Niemeyer, Art (co-instructor)
A ski-jumping Luxo, Jr.. from Spacetime Constraints, 1988 CNM 190 Advanced Digital Animation Lec 10 : Inverse Kinematics & Automating Animation Dan Garcia,, EECS (co-instructor) Greg Niemeyer, Art (co-instructor)
Data-driven Approaches to Simulation (Motion Capture)
") 1 Data-driven Approaches to Simulation (Motion Capture) Ting-Chun Sun tingchun.sun@usc.edu Preface The lecture slides [1] are made by Jessica Hodgins [2], who is a professor in Computer Science Department
1 Data-driven Approaches to Simulation (Motion Capture) Ting-Chun Sun tingchun.sun@usc.edu Preface The lecture slides [1] are made by Jessica Hodgins [2], who is a professor in Computer Science Department
Kinematics of the Stewart Platform (Reality Check 1: page 67)
") MATH 5: Computer Project # - Due on September 7, Kinematics of the Stewart Platform (Reality Check : page 7) A Stewart platform consists of six variable length struts, or prismatic joints, supporting a
MATH 5: Computer Project # - Due on September 7, Kinematics of the Stewart Platform (Reality Check : page 7) A Stewart platform consists of six variable length struts, or prismatic joints, supporting a
Keyframing an IK Skeleton Maya 2012
 2002-2012 Michael O'Rourke Keyframing an IK Skeleton Maya 2012 (This tutorial assumes you have done the Creating an Inverse Kinematic Skeleton tutorial in this set) Concepts Once you have built an Inverse
2002-2012 Michael O'Rourke Keyframing an IK Skeleton Maya 2012 (This tutorial assumes you have done the Creating an Inverse Kinematic Skeleton tutorial in this set) Concepts Once you have built an Inverse
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
Planar Robot Kinematics
 V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
A 12-DOF Analytic Inverse Kinematics Solver for Human Motion Control
 Journal of Information & Computational Science 1: 1 (2004) 137 141 Available at http://www.joics.com A 12-DOF Analytic Inverse Kinematics Solver for Human Motion Control Xiaomao Wu, Lizhuang Ma, Zhihua
Journal of Information & Computational Science 1: 1 (2004) 137 141 Available at http://www.joics.com A 12-DOF Analytic Inverse Kinematics Solver for Human Motion Control Xiaomao Wu, Lizhuang Ma, Zhihua
Animation Lecture 10 Slide Fall 2003
 Animation Lecture 10 Slide 1 6.837 Fall 2003 Conventional Animation Draw each frame of the animation great control tedious Reduce burden with cel animation layer keyframe inbetween cel panoramas (Disney
Animation Lecture 10 Slide 1 6.837 Fall 2003 Conventional Animation Draw each frame of the animation great control tedious Reduce burden with cel animation layer keyframe inbetween cel panoramas (Disney
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
6.837 Computer Graphics Hierarchical Modeling Wojciech Matusik, MIT EECS Some slides from BarbCutler & Jaakko Lehtinen
 6.837 Computer Graphics Hierarchical Modeling Wojciech Matusik, MIT EECS Some slides from BarbCutler & Jaakko Lehtinen Image courtesy of BrokenSphere on Wikimedia Commons. License: CC-BY-SA. This content
6.837 Computer Graphics Hierarchical Modeling Wojciech Matusik, MIT EECS Some slides from BarbCutler & Jaakko Lehtinen Image courtesy of BrokenSphere on Wikimedia Commons. License: CC-BY-SA. This content
Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots
 15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
Creating joints for the NovodeX MAX exporter
 Creating joints for the NovodeX MAX exporter (a step-by-step tutorial by Pierre Terdiman) p.terdiman@wanadoo.fr Version 0.3 I) Creating a hinge Here we'll see how to create a hinge joint compatible with
Creating joints for the NovodeX MAX exporter (a step-by-step tutorial by Pierre Terdiman) p.terdiman@wanadoo.fr Version 0.3 I) Creating a hinge Here we'll see how to create a hinge joint compatible with
Self Assembly of Modular Manipulators with Active and Passive Modules
 Self Assembly of Modular Manipulators with Active and Passive Modules Seung-kook Yun and Daniela Rus Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology, Cambridge,
Self Assembly of Modular Manipulators with Active and Passive Modules Seung-kook Yun and Daniela Rus Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology, Cambridge,
Grade 6 Math Circles November 6 & Relations, Functions, and Morphisms
 Faculty of Mathematics Waterloo, Ontario N2L 3G1 Centre for Education in Mathematics and Computing Relations Let s talk about relations! Grade 6 Math Circles November 6 & 7 2018 Relations, Functions, and
Faculty of Mathematics Waterloo, Ontario N2L 3G1 Centre for Education in Mathematics and Computing Relations Let s talk about relations! Grade 6 Math Circles November 6 & 7 2018 Relations, Functions, and
Math 5320, 3/28/18 Worksheet 26: Ruler and compass constructions. 1. Use your ruler and compass to construct a line perpendicular to the line below:
 Math 5320, 3/28/18 Worksheet 26: Ruler and compass constructions Name: 1. Use your ruler and compass to construct a line perpendicular to the line below: 2. Suppose the following two points are spaced
Math 5320, 3/28/18 Worksheet 26: Ruler and compass constructions Name: 1. Use your ruler and compass to construct a line perpendicular to the line below: 2. Suppose the following two points are spaced
Synthesis by Example. Connecting Motion Planning and Example based Movement. Michael Gleicher
 Synthesis by Example Connecting Motion Planning and Example based Movement Michael Gleicher Dept of Computer Sciences University of Wisconsin Madison Case Study 1 Part I. Michael Gleicher 1 What is Motion
Synthesis by Example Connecting Motion Planning and Example based Movement Michael Gleicher Dept of Computer Sciences University of Wisconsin Madison Case Study 1 Part I. Michael Gleicher 1 What is Motion
CS545 Contents IX. Inverse Kinematics. Reading Assignment for Next Class. Analytical Methods Iterative (Differential) Methods
 Methods") CS545 Contents IX Inverse Kinematics Analytical Methods Iterative (Differential) Methods Geometric and Analytical Jacobian Jacobian Transpose Method Pseudo-Inverse Pseudo-Inverse with Optimization Extended
CS545 Contents IX Inverse Kinematics Analytical Methods Iterative (Differential) Methods Geometric and Analytical Jacobian Jacobian Transpose Method Pseudo-Inverse Pseudo-Inverse with Optimization Extended
Animation by Adaptation Tutorial 1: Animation Basics
 Animation by Adaptation Tutorial 1: Animation Basics Michael Gleicher Graphics Group Department of Computer Sciences University of Wisconsin Madison http://www.cs.wisc.edu/graphics Outline Talk #1: Basics
Animation by Adaptation Tutorial 1: Animation Basics Michael Gleicher Graphics Group Department of Computer Sciences University of Wisconsin Madison http://www.cs.wisc.edu/graphics Outline Talk #1: Basics
Section 05: Solutions
 Section 05: Solutions 1. Asymptotic Analysis (a) Applying definitions For each of the following, choose a c and n 0 which show f(n) O(g(n)). Explain why your values of c and n 0 work. (i) f(n) = 5000n
Section 05: Solutions 1. Asymptotic Analysis (a) Applying definitions For each of the following, choose a c and n 0 which show f(n) O(g(n)). Explain why your values of c and n 0 work. (i) f(n) = 5000n
Game Programming. Bing-Yu Chen National Taiwan University
 Game Programming Bing-Yu Chen National Taiwan University Character Motion Hierarchical Modeling Character Animation Motion Editing 1 Hierarchical Modeling Connected primitives 2 3D Example: A robot arm
Game Programming Bing-Yu Chen National Taiwan University Character Motion Hierarchical Modeling Character Animation Motion Editing 1 Hierarchical Modeling Connected primitives 2 3D Example: A robot arm
Creating animation rigs that solve problems, are fun to use, and don t cause nervous breakdowns.
 Animator Friendly Rigging Creating animation rigs that solve problems, are fun to use, and don t cause nervous breakdowns. - 1- CONTENTS Finishing The Rig... 6 Matching Controls... 7 Matching the position
Animator Friendly Rigging Creating animation rigs that solve problems, are fun to use, and don t cause nervous breakdowns. - 1- CONTENTS Finishing The Rig... 6 Matching Controls... 7 Matching the position
Inverse Kinematics Programming Assignment
 Inverse Kinematics Programming Assignment CS 448D: Character Animation Due: Wednesday, April 29 th 11:59PM 1 Logistics In this programming assignment, you will implement a simple inverse kinematics solver
Inverse Kinematics Programming Assignment CS 448D: Character Animation Due: Wednesday, April 29 th 11:59PM 1 Logistics In this programming assignment, you will implement a simple inverse kinematics solver
Presets are the heart of Genoma. They can be added to so you can build up a library of reusable rig parts or even complete rigs to suit your
 Genoma 1 Genoma 1 Presets Presets are the heart of Genoma. They can be added to so you can build up a library of reusable rig parts or even complete rigs to suit your needs. Opening the Genoma Presets
Genoma 1 Genoma 1 Presets Presets are the heart of Genoma. They can be added to so you can build up a library of reusable rig parts or even complete rigs to suit your needs. Opening the Genoma Presets
Chapter 3 : Computer Animation
 Chapter 3 : Computer Animation Histor First animation films (Disne) 30 drawings / second animator in chief : ke frames others : secondar drawings Use the computer to interpolate? positions orientations
Chapter 3 : Computer Animation Histor First animation films (Disne) 30 drawings / second animator in chief : ke frames others : secondar drawings Use the computer to interpolate? positions orientations
Rigging / Skinning. based on Taku Komura, Jehee Lee and Charles B.Own's slides
 Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
The name of our class will be Yo. Type that in where it says Class Name. Don t hit the OK button yet.
 Mr G s Java Jive #2: Yo! Our First Program With this handout you ll write your first program, which we ll call Yo. Programs, Classes, and Objects, Oh My! People regularly refer to Java as a language that
Mr G s Java Jive #2: Yo! Our First Program With this handout you ll write your first program, which we ll call Yo. Programs, Classes, and Objects, Oh My! People regularly refer to Java as a language that
Inverse Kinematics II and Motion Capture
 Mathematical Foundations of Computer Graphics and Vision Inverse Kinematics II and Motion Capture Luca Ballan Institute of Visual Computing Comparison 0 1 A B 2 C 3 Fake exponential map Real exponential
Mathematical Foundations of Computer Graphics and Vision Inverse Kinematics II and Motion Capture Luca Ballan Institute of Visual Computing Comparison 0 1 A B 2 C 3 Fake exponential map Real exponential
Character Animation 1
 Character Animation 1 Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character
Character Animation 1 Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character
Solving IK problems for open chains using optimization methods
 Proceedings of the International Multiconference on Computer Science and Information Technology pp. 933 937 ISBN 978-83-60810-14-9 ISSN 1896-7094 Solving IK problems for open chains using optimization
Proceedings of the International Multiconference on Computer Science and Information Technology pp. 933 937 ISBN 978-83-60810-14-9 ISSN 1896-7094 Solving IK problems for open chains using optimization
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
we now have a good understanding of 3d representations, rigid body transforms, camera projections, and the fixed function steps in graphics
 big picture goals we now have a good understanding of 3d representations, rigid body transforms, camera projections, and the fixed function steps in graphics now we are going to add higher level structure
big picture goals we now have a good understanding of 3d representations, rigid body transforms, camera projections, and the fixed function steps in graphics now we are going to add higher level structure
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Lesson 1: Introduction to Pro/MECHANICA Motion
 Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
(Refer Slide Time 3:31)
") Digital Circuits and Systems Prof. S. Srinivasan Department of Electrical Engineering Indian Institute of Technology Madras Lecture - 5 Logic Simplification In the last lecture we talked about logic functions
Digital Circuits and Systems Prof. S. Srinivasan Department of Electrical Engineering Indian Institute of Technology Madras Lecture - 5 Logic Simplification In the last lecture we talked about logic functions
Computer Animation Fundamentals. Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics
 Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Motion for Computer Animation. Michael Gleicher Department of Computer Sciences University of Wisconsin, Madison
 Motion for Computer Animation Michael Gleicher Department of Computer Sciences University of Wisconsin, Madison Outline A brief history of computer animation (animation appreciation) Video! Techniques
Motion for Computer Animation Michael Gleicher Department of Computer Sciences University of Wisconsin, Madison Outline A brief history of computer animation (animation appreciation) Video! Techniques
Overview. Animation is a big topic We will concentrate on character animation as is used in many games today. humans, animals, monsters, robots, etc.
 ANIMATION Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character is represented
ANIMATION Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character is represented
Chapter 5.2 Character Animation
 Chapter 5.2 Character Animation Overview Fundamental Concepts Animation Storage Playing Animations Blending Animations Motion Extraction Mesh Deformation Inverse Kinematics Attachments & Collision Detection
Chapter 5.2 Character Animation Overview Fundamental Concepts Animation Storage Playing Animations Blending Animations Motion Extraction Mesh Deformation Inverse Kinematics Attachments & Collision Detection
3. Manipulator Kinematics. Division of Electronic Engineering Prof. Jaebyung Park
 3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
Inverse Kinematics Software Design and Trajectory Control Programming of SCARA Manipulator robot
 International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
ÉCOLE POLYTECHNIQUE DE MONTRÉAL
 ÉCOLE POLYTECHNIQUE DE MONTRÉAL MODELIZATION OF A 3-PSP 3-DOF PARALLEL MANIPULATOR USED AS FLIGHT SIMULATOR MOVING SEAT. MASTER IN ENGINEERING PROJET III MEC693 SUBMITTED TO: Luc Baron Ph.D. Mechanical
ÉCOLE POLYTECHNIQUE DE MONTRÉAL MODELIZATION OF A 3-PSP 3-DOF PARALLEL MANIPULATOR USED AS FLIGHT SIMULATOR MOVING SEAT. MASTER IN ENGINEERING PROJET III MEC693 SUBMITTED TO: Luc Baron Ph.D. Mechanical
02/22/02. Assignment 1 on the web page: Announcements. Test login procedure NOW!
 Announcements Assignment on the web page: www.cs.cmu.edu/~jkh/anim_class.html est login procedure NOW! 0//0 Forward and Inverse Kinematics Parent: Chapter 4. Girard and Maciejewski 985 Zhao and Badler
Announcements Assignment on the web page: www.cs.cmu.edu/~jkh/anim_class.html est login procedure NOW! 0//0 Forward and Inverse Kinematics Parent: Chapter 4. Girard and Maciejewski 985 Zhao and Badler
Retargetting Motion to New Characters. Retargetting Motion to New Characters. Page 1. Motion Retargetting. Motion Retargetting
 Left right Retargetting Motion to New Characters Michael Gleicher Vision Technology Center Autodesk Mountain View, CA Retargetting Motion to New Characters Michael Gleicher Department of Computer Science
Left right Retargetting Motion to New Characters Michael Gleicher Vision Technology Center Autodesk Mountain View, CA Retargetting Motion to New Characters Michael Gleicher Department of Computer Science
Animation. CS 4620 Lecture 33. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Shade tutorial: Shoes for Poser.
 Shade tutorial: Shoes for Poser www.oscillator.se/3d Notes Welcome to the Shade tutorial: Shoes for Poser. This is my first tutorial for Shade. I was inspired by the friendly and generous people at Shader
Shade tutorial: Shoes for Poser www.oscillator.se/3d Notes Welcome to the Shade tutorial: Shoes for Poser. This is my first tutorial for Shade. I was inspired by the friendly and generous people at Shader
Animation. CS 4620 Lecture 32. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Over-determinate Kinematic Analysis
 The webcast will start in a few minutes. Over-determinate Kinematic Analysis FOR M USCULOSKELETAL M ODELING Date 14 th 2017 Outline General introduction to the modeling system The math over-determinate
The webcast will start in a few minutes. Over-determinate Kinematic Analysis FOR M USCULOSKELETAL M ODELING Date 14 th 2017 Outline General introduction to the modeling system The math over-determinate
COMP 175 COMPUTER GRAPHICS. Lecture 10: Animation. COMP 175: Computer Graphics March 12, Erik Anderson 08 Animation
 Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
What's the Slope of a Line?
 What's the Slope of a Line? These lines look pretty different, don't they? Lines are used to keep track of lots of info -- like how much money a company makes. Just off the top of your head, which of the
What's the Slope of a Line? These lines look pretty different, don't they? Lines are used to keep track of lots of info -- like how much money a company makes. Just off the top of your head, which of the
Polar Coordinates. 2, π and ( )
") Polar Coordinates Up to this point we ve dealt exclusively with the Cartesian (or Rectangular, or x-y) coordinate system. However, as we will see, this is not always the easiest coordinate system to work
Polar Coordinates Up to this point we ve dealt exclusively with the Cartesian (or Rectangular, or x-y) coordinate system. However, as we will see, this is not always the easiest coordinate system to work