Dynamic programming. Trivial problems are solved first More complex solutions are composed from the simpler solutions already computed
|
|
|
- Camilla Elliott
- 6 years ago
- Views:
Transcription
1 Dynamic programming Solves a complex problem by breaking it down into subproblems Each subproblem is broken down recursively until a trivial problem is reached Computation itself is not recursive: problems are solved from simple to more complex Trivial problems are solved first More complex solutions are composed from the simpler solutions already computed
2 Dynamic programming Applicable efficiently when Composing more complex solutions from subproblems solutions is fast (linear time) Subproblems are overlapping: a single solution is required to solve several other subproblems Has a clear advantage over recursion Has optimal substructure Each level of subproblems is only slightly more complex than the lower level See Principle of optimality, Bellman equation etc.
3 Polynomial time algorithms Floyd-Warshall algorithm CYK algorithm Levenshtein distance Viterbi algorithm Several string algorithms
4 Exponential time algorithms Useful for many problems where search space is superexponential in the input size n Permutation problems, O*(n!) Example: Travelling salesman problem Partition problems, O*(n n) Example: Graph coloring problem Typically solved dynamically by identifying subproblems on subsets of the original problem The number of subsets is only exponential in n
5 Travelling salesman problem Given an undirected weighed graph (V, E) of n vertices, find a cycle of minimum weight that visits each vertex in V exactly once A permutation problem: brute-force search enumerates all permutations of vertices, running in time O*(n!) Associated decision problem is NP-complete With dynamic programming we can solve the problem in time O*(2 n )
6 Dynamic TSP We first choose an arbitrary starting vertex s V For each nonempty U V and e U we compute OPT[U,e], the length of the shortest tour starting in s, visiting all vertices in U and ending in e For U = {e} we trivially set OPT[U,e] = d(s,e) For U > 1, u U \ {e}, if a tour containing the edge (u,e) is optimal, the tour on U \ {e} ending in u must be optimal as well Thus, for U > 1, OPT[U,e] is the minimum of OPT[U \ {e},u] + d(u,e) over all u U \ {e}
7 Dynamic TSP
8 Dynamic TSP
9 Dynamic TSP
10 Dynamic TSP
11 Dynamic TSP
12 Dynamic TSP To compute OPT[U,e], we need the values OPT[U \ {e},u] for all u U \ {e} We compute OPT in the order of increasing size of U to ensure the values are already computed Computing a single value takes O(n) time Finally, OPT[V,s] is the solution to the problem The number of subsets is O(2 n) and for each we evaluate the recurrence O(n) times Total running time is O(2 nn 2 ) = O*(2 n )
13 TSP in bounded degree graphs Despite its age the dynamic solution is still the best we have It's unknown whether a faster algorithm exists In some interesting special cases we can can solve TSP in time O*((2 ε) n ) for some ε > 0 E.g. graphs with bounded maximum degree Δ For cubic graphs (Δ = 3) a branching algorithm solves TSP in time O*(1.251 n ) For Δ = 4 we can do it in O*(1.733 n)
14 TSP in bounded degree graphs For Δ > 4 a more recent result bounds the time by O*((2 ε) n ) where ε > 0 depends only on Δ Observation: the dynamic algorithm needs to evaluate only tours on connected sets U V is a connected set if G[U] is connected Connectedness can be checked in O(n) time This yields the running time O*( C ) where C is the family of connected sets of the graph Analysis is reduced to estimating the size of C
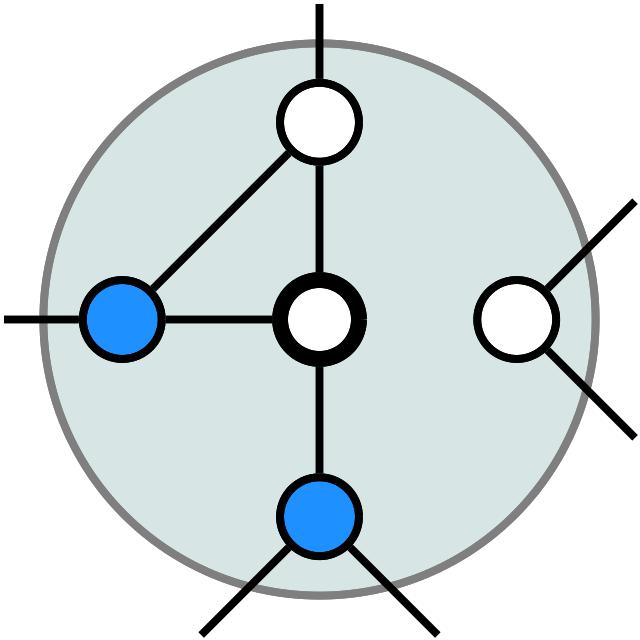
15 Connected sets
16 TSP in bounded degree graphs For an n-vertex graph of maximum degree Δ we can show that C = O((2 Δ + 1 1) n / (Δ + 1) ) A lemma derived from Shearer's inequality: Let V be a finite set with subsets A1,..., A k such that each v V is in at least δ subsets Let F be a family of subsets of V Let Fi = {S A i : S F} for all i = 1..k Then, F δ is at most the product of F i over i = 1..k
17 TSP in bounded degree graphs For each v V we (initially) define Av as the closed neighborhood of v For each u V with the degree d(u) < Δ we add u in Δ d(u) sets A v, chosen arbitrarily Now each v V is contained in Δ + 1 subsets Define C' = C \ {{v} : v V} And the projections Cv = {S A v : S C'} for each v V
18 Projection, Δ = 3
19 Projection, Δ = 3
20 Projection, Δ = 3
21 Projection, Δ = 3
22 Projection, Δ = 3
23 TSP in bounded degree graphs Observe that for each v V the set Cv does not contain {v} since all sets in C' are connected Thus, the size of Cv is at most 2 Av 1 Shearer: C' Δ + 1 is at most the product of 2 Av 1 over v V With Jensen's inequality we can bound the product (and thus C' Δ + 1 ) by (2 Δ + 1 1) n Thus, the size of C' is at most (2 Δ + 1 1) n / (Δ + 1) C = C' + n, yielding the claimed bound
24 Time-space tradeoff In practical applications space complexity is often a greater problem than time Dynamic TSP needs exponential space A recursive algorithm that finds similar subtours runs in O*(4 n n log n ) time and polynomial space By switching from recursion to dynamic programming for small subproblems we get a more balanced tradeoff Integer-TSP can also be solved in polynomial space and time within a polynomial factor of the number of connected dominating sets
25 Graph coloring A k-coloring of an undirected graph G = (V,E) assigns one of k colors to each v V such that all adjacent vertices have different colors The smallest k with a k-coloring is called the chromatic number of G and denoted by χ(g) The graph coloring problem asks for either χ(g) or an optimal coloring, using χ(g) colors A partition problem: brute-force search enumerates all partitions of vertices to color classes in O*(χ(G) n ) time In the worst case χ(g) = n and the running time is O*(n n) Dynamic programming solves the problem in O*( n)
26 Optimal coloring of Petersen graph
27 Dynamic graph coloring Recall independent sets A subset of vertices I V is an independent set if I contains no adjacent vertices I is maximal if no proper superset of I is independent Observation: A k-coloring is a partition of V into independent sets Each k-coloring can be modified so that at least one set is maximally independent (without increasing k) Consequently, there is an optimal coloring with a maximally independent set
28 Dynamic graph coloring For each U V we find OPT[U] = χ(g[u]), the chromatic number of the subgraph induced by U Trivially, OPT[Ø] = 0 For U > 0, an optimal coloring consists of a maximal independent set I and an optimal coloring on the remaining vertices in G[U \ I] Thus, OPT[U] is the minimum of 1 + OPT[U \ I] over the maximally independent sets I of G[U] By computing in the order of increasing size of U, we ensure we already have the values OPT[U \ I]
29 Dynamic graph coloring To compute OPT[U] we also need to enumerate all maximal independent sets of G[U] This can be done within a polynomial factor of the number of such sets, which for a subgraph of i vertices is at most 3 i / 3 The total number of maximal independent sets over all induced subgraphs of an n-vertex graph is at most ( / 3 ) n = O( n ), and for each we need n O(1) steps, yielding the claimed bound Finally, OPT[V] = χ(g)
30 Conclusion Dynamic programming solves a complex problem by breaking it into simpler subproblems Subproblems overlap: we compute from simpler to more complex, storing solutions in memory to avoid recomputation We can sometimes solve problems with superexponential search space in exponential time, often running on subsets of the problem (e.g. TSP, graph coloring) Sometimes we can ignore special subsets and get a more efficient exponential time solution Space complexity is often the most restrictive factor
Theorem 2.9: nearest addition algorithm
 There are severe limits on our ability to compute near-optimal tours It is NP-complete to decide whether a given undirected =(,)has a Hamiltonian cycle An approximation algorithm for the TSP can be used
There are severe limits on our ability to compute near-optimal tours It is NP-complete to decide whether a given undirected =(,)has a Hamiltonian cycle An approximation algorithm for the TSP can be used
Approximation Algorithms
 Chapter 8 Approximation Algorithms Algorithm Theory WS 2016/17 Fabian Kuhn Approximation Algorithms Optimization appears everywhere in computer science We have seen many examples, e.g.: scheduling jobs
Chapter 8 Approximation Algorithms Algorithm Theory WS 2016/17 Fabian Kuhn Approximation Algorithms Optimization appears everywhere in computer science We have seen many examples, e.g.: scheduling jobs
Exact Algorithms for NP-hard problems
 24 mai 2012 1 Why do we need exponential algorithms? 2 3 Why the P-border? 1 Practical reasons (Jack Edmonds, 1965) For practical purposes the difference between algebraic and exponential order is more
24 mai 2012 1 Why do we need exponential algorithms? 2 3 Why the P-border? 1 Practical reasons (Jack Edmonds, 1965) For practical purposes the difference between algebraic and exponential order is more
COMP 355 Advanced Algorithms Approximation Algorithms: VC and TSP Chapter 11 (KT) Section (CLRS)
 Section (CLRS)") COMP 355 Advanced Algorithms Approximation Algorithms: VC and TSP Chapter 11 (KT) Section 35.1-35.2(CLRS) 1 Coping with NP-Completeness Brute-force search: This is usually only a viable option for small
COMP 355 Advanced Algorithms Approximation Algorithms: VC and TSP Chapter 11 (KT) Section 35.1-35.2(CLRS) 1 Coping with NP-Completeness Brute-force search: This is usually only a viable option for small
val(y, I) α (9.0.2) α (9.0.3)
 α (9.0.2) α (9.0.3)") CS787: Advanced Algorithms Lecture 9: Approximation Algorithms In this lecture we will discuss some NP-complete optimization problems and give algorithms for solving them that produce a nearly optimal,
CS787: Advanced Algorithms Lecture 9: Approximation Algorithms In this lecture we will discuss some NP-complete optimization problems and give algorithms for solving them that produce a nearly optimal,
CMSC 451: Lecture 22 Approximation Algorithms: Vertex Cover and TSP Tuesday, Dec 5, 2017
 CMSC 451: Lecture 22 Approximation Algorithms: Vertex Cover and TSP Tuesday, Dec 5, 2017 Reading: Section 9.2 of DPV. Section 11.3 of KT presents a different approximation algorithm for Vertex Cover. Coping
CMSC 451: Lecture 22 Approximation Algorithms: Vertex Cover and TSP Tuesday, Dec 5, 2017 Reading: Section 9.2 of DPV. Section 11.3 of KT presents a different approximation algorithm for Vertex Cover. Coping
Module 6 NP-Complete Problems and Heuristics
 Module 6 NP-Complete Problems and Heuristics Dr. Natarajan Meghanathan Professor of Computer Science Jackson State University Jackson, MS 39217 E-mail: natarajan.meghanathan@jsums.edu P, NP-Problems Class
Module 6 NP-Complete Problems and Heuristics Dr. Natarajan Meghanathan Professor of Computer Science Jackson State University Jackson, MS 39217 E-mail: natarajan.meghanathan@jsums.edu P, NP-Problems Class
Introduction to Combinatorial Algorithms
 Fall 2009 Intro Introduction to the course What are : Combinatorial Structures? Combinatorial Algorithms? Combinatorial Problems? Combinatorial Structures Combinatorial Structures Combinatorial structures
Fall 2009 Intro Introduction to the course What are : Combinatorial Structures? Combinatorial Algorithms? Combinatorial Problems? Combinatorial Structures Combinatorial Structures Combinatorial structures
1 Variations of the Traveling Salesman Problem
 Stanford University CS26: Optimization Handout 3 Luca Trevisan January, 20 Lecture 3 In which we prove the equivalence of three versions of the Traveling Salesman Problem, we provide a 2-approximate algorithm,
Stanford University CS26: Optimization Handout 3 Luca Trevisan January, 20 Lecture 3 In which we prove the equivalence of three versions of the Traveling Salesman Problem, we provide a 2-approximate algorithm,
Better approximations for max TSP
 Information Processing Letters 75 (2000) 181 186 Better approximations for max TSP Refael Hassin,1, Shlomi Rubinstein Department of Statistics and Operations Research, School of Mathematical Sciences,
Information Processing Letters 75 (2000) 181 186 Better approximations for max TSP Refael Hassin,1, Shlomi Rubinstein Department of Statistics and Operations Research, School of Mathematical Sciences,
arxiv:cs/ v1 [cs.ds] 20 Feb 2003
![arxiv:cs/ v1 [cs.ds] 20 Feb 2003](/thumbs/82/85921811.jpg "arxiv:cs/ v1 [cs.ds] 20 Feb 2003") The Traveling Salesman Problem for Cubic Graphs David Eppstein School of Information & Computer Science University of California, Irvine Irvine, CA 92697-3425, USA eppstein@ics.uci.edu arxiv:cs/0302030v1
The Traveling Salesman Problem for Cubic Graphs David Eppstein School of Information & Computer Science University of California, Irvine Irvine, CA 92697-3425, USA eppstein@ics.uci.edu arxiv:cs/0302030v1
Dynamic Programming II
 Lecture 11 Dynamic Programming II 11.1 Overview In this lecture we continue our discussion of dynamic programming, focusing on using it for a variety of path-finding problems in graphs. Topics in this
Lecture 11 Dynamic Programming II 11.1 Overview In this lecture we continue our discussion of dynamic programming, focusing on using it for a variety of path-finding problems in graphs. Topics in this
Traveling Salesman Problem (TSP) Input: undirected graph G=(V,E), c: E R + Goal: find a tour (Hamiltonian cycle) of minimum cost
 Input: undirected graph G=(V,E), c: E R + Goal: find a tour (Hamiltonian cycle) of minimum cost") Traveling Salesman Problem (TSP) Input: undirected graph G=(V,E), c: E R + Goal: find a tour (Hamiltonian cycle) of minimum cost Traveling Salesman Problem (TSP) Input: undirected graph G=(V,E), c: E R
Traveling Salesman Problem (TSP) Input: undirected graph G=(V,E), c: E R + Goal: find a tour (Hamiltonian cycle) of minimum cost Traveling Salesman Problem (TSP) Input: undirected graph G=(V,E), c: E R
Algorithm Design and Analysis
 Algorithm Design and Analysis LECTURE 29 Approximation Algorithms Load Balancing Weighted Vertex Cover Reminder: Fill out SRTEs online Don t forget to click submit Sofya Raskhodnikova 12/7/2016 Approximation
Algorithm Design and Analysis LECTURE 29 Approximation Algorithms Load Balancing Weighted Vertex Cover Reminder: Fill out SRTEs online Don t forget to click submit Sofya Raskhodnikova 12/7/2016 Approximation
Module 6 P, NP, NP-Complete Problems and Approximation Algorithms
 Module 6 P, NP, NP-Complete Problems and Approximation Algorithms Dr. Natarajan Meghanathan Associate Professor of Computer Science Jackson State University Jackson, MS 39217 E-mail: natarajan.meghanathan@jsums.edu
Module 6 P, NP, NP-Complete Problems and Approximation Algorithms Dr. Natarajan Meghanathan Associate Professor of Computer Science Jackson State University Jackson, MS 39217 E-mail: natarajan.meghanathan@jsums.edu
Lecture 8: The Traveling Salesman Problem
 Lecture 8: The Traveling Salesman Problem Let G = (V, E) be an undirected graph. A Hamiltonian cycle of G is a cycle that visits every vertex v V exactly once. Instead of Hamiltonian cycle, we sometimes
Lecture 8: The Traveling Salesman Problem Let G = (V, E) be an undirected graph. A Hamiltonian cycle of G is a cycle that visits every vertex v V exactly once. Instead of Hamiltonian cycle, we sometimes
CAD Algorithms. Categorizing Algorithms
 CAD Algorithms Categorizing Algorithms Mohammad Tehranipoor ECE Department 2 September 2008 1 Categorizing Algorithms Greedy Algorithms Prim s Algorithm (Minimum Spanning Tree) A subgraph that is a tree
CAD Algorithms Categorizing Algorithms Mohammad Tehranipoor ECE Department 2 September 2008 1 Categorizing Algorithms Greedy Algorithms Prim s Algorithm (Minimum Spanning Tree) A subgraph that is a tree
The k-center problem Approximation Algorithms 2009 Petros Potikas
 Approximation Algorithms 2009 Petros Potikas 1 Definition: Let G=(V,E) be a complete undirected graph with edge costs satisfying the triangle inequality and k be an integer, 0 < k V. For any S V and vertex
Approximation Algorithms 2009 Petros Potikas 1 Definition: Let G=(V,E) be a complete undirected graph with edge costs satisfying the triangle inequality and k be an integer, 0 < k V. For any S V and vertex
Introduction to Graph Theory
 Introduction to Graph Theory Tandy Warnow January 20, 2017 Graphs Tandy Warnow Graphs A graph G = (V, E) is an object that contains a vertex set V and an edge set E. We also write V (G) to denote the vertex
Introduction to Graph Theory Tandy Warnow January 20, 2017 Graphs Tandy Warnow Graphs A graph G = (V, E) is an object that contains a vertex set V and an edge set E. We also write V (G) to denote the vertex
Chapter 9 Graph Algorithms
 Introduction graph theory useful in practice represent many real-life problems can be if not careful with data structures Chapter 9 Graph s 2 Definitions Definitions an undirected graph is a finite set
Introduction graph theory useful in practice represent many real-life problems can be if not careful with data structures Chapter 9 Graph s 2 Definitions Definitions an undirected graph is a finite set
Treewidth and graph minors
 Treewidth and graph minors Lectures 9 and 10, December 29, 2011, January 5, 2012 We shall touch upon the theory of Graph Minors by Robertson and Seymour. This theory gives a very general condition under
Treewidth and graph minors Lectures 9 and 10, December 29, 2011, January 5, 2012 We shall touch upon the theory of Graph Minors by Robertson and Seymour. This theory gives a very general condition under
Chapter 6. Dynamic Programming
 Chapter 6 Dynamic Programming CS 573: Algorithms, Fall 203 September 2, 203 6. Maximum Weighted Independent Set in Trees 6..0. Maximum Weight Independent Set Problem Input Graph G = (V, E) and weights
Chapter 6 Dynamic Programming CS 573: Algorithms, Fall 203 September 2, 203 6. Maximum Weighted Independent Set in Trees 6..0. Maximum Weight Independent Set Problem Input Graph G = (V, E) and weights
Unit-5 Dynamic Programming 2016
 5 Dynamic programming Overview, Applications - shortest path in graph, matrix multiplication, travelling salesman problem, Fibonacci Series. 20% 12 Origin: Richard Bellman, 1957 Programming referred to
5 Dynamic programming Overview, Applications - shortest path in graph, matrix multiplication, travelling salesman problem, Fibonacci Series. 20% 12 Origin: Richard Bellman, 1957 Programming referred to
Greedy algorithms Or Do the right thing
 Greedy algorithms Or Do the right thing March 1, 2005 1 Greedy Algorithm Basic idea: When solving a problem do locally the right thing. Problem: Usually does not work. VertexCover (Optimization Version)
Greedy algorithms Or Do the right thing March 1, 2005 1 Greedy Algorithm Basic idea: When solving a problem do locally the right thing. Problem: Usually does not work. VertexCover (Optimization Version)
Domination, Independence and Other Numbers Associated With the Intersection Graph of a Set of Half-planes
 Domination, Independence and Other Numbers Associated With the Intersection Graph of a Set of Half-planes Leonor Aquino-Ruivivar Mathematics Department, De La Salle University Leonorruivivar@dlsueduph
Domination, Independence and Other Numbers Associated With the Intersection Graph of a Set of Half-planes Leonor Aquino-Ruivivar Mathematics Department, De La Salle University Leonorruivivar@dlsueduph
The Parameterized Complexity of the Rainbow Subgraph Problem. Falk Hüffner, Christian Komusiewicz *, Rolf Niedermeier and Martin Rötzschke
 Algorithms 2015, 8, 60-81; doi:10.3390/a8010060 OPEN ACCESS algorithms ISSN 1999-4893 www.mdpi.com/journal/algorithms Article The Parameterized Complexity of the Rainbow Subgraph Problem Falk Hüffner,
Algorithms 2015, 8, 60-81; doi:10.3390/a8010060 OPEN ACCESS algorithms ISSN 1999-4893 www.mdpi.com/journal/algorithms Article The Parameterized Complexity of the Rainbow Subgraph Problem Falk Hüffner,
arxiv: v2 [cs.ds] 30 Nov 2012
![arxiv: v2 [cs.ds] 30 Nov 2012](/thumbs/91/107035964.jpg "arxiv: v2 [cs.ds] 30 Nov 2012") A New Upper Bound for the Traveling Salesman Problem in Cubic Graphs Maciej Liśkiewicz 1 and Martin R. Schuster 1 1 Institute of Theoretical Computer Science, University of Lübeck Ratzeburger Allee 160,
A New Upper Bound for the Traveling Salesman Problem in Cubic Graphs Maciej Liśkiewicz 1 and Martin R. Schuster 1 1 Institute of Theoretical Computer Science, University of Lübeck Ratzeburger Allee 160,
Department of Computer Applications. MCA 312: Design and Analysis of Algorithms. [Part I : Medium Answer Type Questions] UNIT I
![Department of Computer Applications. MCA 312: Design and Analysis of Algorithms. [Part I : Medium Answer Type Questions] UNIT I](/thumbs/94/122075835.jpg "Department of Computer Applications. MCA 312: Design and Analysis of Algorithms. [Part I : Medium Answer Type Questions] UNIT I") MCA 312: Design and Analysis of Algorithms [Part I : Medium Answer Type Questions] UNIT I 1) What is an Algorithm? What is the need to study Algorithms? 2) Define: a) Time Efficiency b) Space Efficiency
MCA 312: Design and Analysis of Algorithms [Part I : Medium Answer Type Questions] UNIT I 1) What is an Algorithm? What is the need to study Algorithms? 2) Define: a) Time Efficiency b) Space Efficiency
Chapter 9 Graph Algorithms
 Chapter 9 Graph Algorithms 2 Introduction graph theory useful in practice represent many real-life problems can be if not careful with data structures 3 Definitions an undirected graph G = (V, E) is a
Chapter 9 Graph Algorithms 2 Introduction graph theory useful in practice represent many real-life problems can be if not careful with data structures 3 Definitions an undirected graph G = (V, E) is a
Decision Problems. Observation: Many polynomial algorithms. Questions: Can we solve all problems in polynomial time? Answer: No, absolutely not.
 Decision Problems Observation: Many polynomial algorithms. Questions: Can we solve all problems in polynomial time? Answer: No, absolutely not. Definition: The class of problems that can be solved by polynomial-time
Decision Problems Observation: Many polynomial algorithms. Questions: Can we solve all problems in polynomial time? Answer: No, absolutely not. Definition: The class of problems that can be solved by polynomial-time
1 The Traveling Salesperson Problem (TSP)
") CS 598CSC: Approximation Algorithms Lecture date: January 23, 2009 Instructor: Chandra Chekuri Scribe: Sungjin Im In the previous lecture, we had a quick overview of several basic aspects of approximation
CS 598CSC: Approximation Algorithms Lecture date: January 23, 2009 Instructor: Chandra Chekuri Scribe: Sungjin Im In the previous lecture, we had a quick overview of several basic aspects of approximation
11/22/2016. Chapter 9 Graph Algorithms. Introduction. Definitions. Definitions. Definitions. Definitions
 Introduction Chapter 9 Graph Algorithms graph theory useful in practice represent many real-life problems can be slow if not careful with data structures 2 Definitions an undirected graph G = (V, E) is
Introduction Chapter 9 Graph Algorithms graph theory useful in practice represent many real-life problems can be slow if not careful with data structures 2 Definitions an undirected graph G = (V, E) is
Chapter 9 Graph Algorithms
 Chapter 9 Graph Algorithms 2 Introduction graph theory useful in practice represent many real-life problems can be slow if not careful with data structures 3 Definitions an undirected graph G = (V, E)
Chapter 9 Graph Algorithms 2 Introduction graph theory useful in practice represent many real-life problems can be slow if not careful with data structures 3 Definitions an undirected graph G = (V, E)
Algorithms for Euclidean TSP
 This week, paper [2] by Arora. See the slides for figures. See also http://www.cs.princeton.edu/~arora/pubs/arorageo.ps Algorithms for Introduction This lecture is about the polynomial time approximation
This week, paper [2] by Arora. See the slides for figures. See also http://www.cs.princeton.edu/~arora/pubs/arorageo.ps Algorithms for Introduction This lecture is about the polynomial time approximation
Assignment 4 Solutions of graph problems
 Assignment 4 Solutions of graph problems 1. Let us assume that G is not a cycle. Consider the maximal path in the graph. Let the end points of the path be denoted as v 1, v k respectively. If either of
Assignment 4 Solutions of graph problems 1. Let us assume that G is not a cycle. Consider the maximal path in the graph. Let the end points of the path be denoted as v 1, v k respectively. If either of
Traveling Salesperson Problem (TSP)
") TSP-0 Traveling Salesperson Problem (TSP) Input: Undirected edge weighted complete graph G = (V, E, W ), where W : e R +. Tour: Find a path that starts at vertex 1, visits every vertex exactly once, and
TSP-0 Traveling Salesperson Problem (TSP) Input: Undirected edge weighted complete graph G = (V, E, W ), where W : e R +. Tour: Find a path that starts at vertex 1, visits every vertex exactly once, and
P and NP CISC4080, Computer Algorithms CIS, Fordham Univ. Instructor: X. Zhang
 P and NP CISC4080, Computer Algorithms CIS, Fordham Univ. Instructor: X. Zhang Efficient Algorithms So far, we have developed algorithms for finding shortest paths in graphs, minimum spanning trees in
P and NP CISC4080, Computer Algorithms CIS, Fordham Univ. Instructor: X. Zhang Efficient Algorithms So far, we have developed algorithms for finding shortest paths in graphs, minimum spanning trees in
Best known solution time is Ω(V!) Check every permutation of vertices to see if there is a graph edge between adjacent vertices
 Check every permutation of vertices to see if there is a graph edge between adjacent vertices") Hard Problems Euler-Tour Problem Undirected graph G=(V,E) An Euler Tour is a path where every edge appears exactly once. The Euler-Tour Problem: does graph G have an Euler Path? Answerable in O(E) time.
Hard Problems Euler-Tour Problem Undirected graph G=(V,E) An Euler Tour is a path where every edge appears exactly once. The Euler-Tour Problem: does graph G have an Euler Path? Answerable in O(E) time.
Lecture Notes: Euclidean Traveling Salesman Problem
 IOE 691: Approximation Algorithms Date: 2/6/2017, 2/8/2017 ecture Notes: Euclidean Traveling Salesman Problem Instructor: Viswanath Nagarajan Scribe: Miao Yu 1 Introduction In the Euclidean Traveling Salesman
IOE 691: Approximation Algorithms Date: 2/6/2017, 2/8/2017 ecture Notes: Euclidean Traveling Salesman Problem Instructor: Viswanath Nagarajan Scribe: Miao Yu 1 Introduction In the Euclidean Traveling Salesman
CSCE 350: Chin-Tser Huang. University of South Carolina
 CSCE 350: Data Structures and Algorithms Chin-Tser Huang huangct@cse.sc.edu University of South Carolina Announcement Homework 2 will be returned on Thursday; solution will be available on class website
CSCE 350: Data Structures and Algorithms Chin-Tser Huang huangct@cse.sc.edu University of South Carolina Announcement Homework 2 will be returned on Thursday; solution will be available on class website
NP-complete Reductions
 NP-complete Reductions 1. Prove that 3SAT P DOUBLE-SAT, i.e., show DOUBLE-SAT is NP-complete by reduction from 3SAT. The 3-SAT problem consists of a conjunction of clauses over n Boolean variables, where
NP-complete Reductions 1. Prove that 3SAT P DOUBLE-SAT, i.e., show DOUBLE-SAT is NP-complete by reduction from 3SAT. The 3-SAT problem consists of a conjunction of clauses over n Boolean variables, where
Analysis of Algorithms Prof. Karen Daniels
 UMass Lowell Computer Science 91.503 Analysis of Algorithms Prof. Karen Daniels Spring, 2010 Lecture 2 Tuesday, 2/2/10 Design Patterns for Optimization Problems Greedy Algorithms Algorithmic Paradigm Context
UMass Lowell Computer Science 91.503 Analysis of Algorithms Prof. Karen Daniels Spring, 2010 Lecture 2 Tuesday, 2/2/10 Design Patterns for Optimization Problems Greedy Algorithms Algorithmic Paradigm Context
P and NP CISC5835, Algorithms for Big Data CIS, Fordham Univ. Instructor: X. Zhang
 P and NP CISC5835, Algorithms for Big Data CIS, Fordham Univ. Instructor: X. Zhang Efficient Algorithms So far, we have developed algorithms for finding shortest paths in graphs, minimum spanning trees
P and NP CISC5835, Algorithms for Big Data CIS, Fordham Univ. Instructor: X. Zhang Efficient Algorithms So far, we have developed algorithms for finding shortest paths in graphs, minimum spanning trees
Methods and Models for Combinatorial Optimization Exact methods for the Traveling Salesman Problem
 Methods and Models for Combinatorial Optimization Exact methods for the Traveling Salesman Problem L. De Giovanni M. Di Summa The Traveling Salesman Problem (TSP) is an optimization problem on a directed
Methods and Models for Combinatorial Optimization Exact methods for the Traveling Salesman Problem L. De Giovanni M. Di Summa The Traveling Salesman Problem (TSP) is an optimization problem on a directed
Faster parameterized algorithms for Minimum Fill-In
 Faster parameterized algorithms for Minimum Fill-In Hans L. Bodlaender Pinar Heggernes Yngve Villanger Abstract We present two parameterized algorithms for the Minimum Fill-In problem, also known as Chordal
Faster parameterized algorithms for Minimum Fill-In Hans L. Bodlaender Pinar Heggernes Yngve Villanger Abstract We present two parameterized algorithms for the Minimum Fill-In problem, also known as Chordal
Reference Sheet for CO142.2 Discrete Mathematics II
 Reference Sheet for CO14. Discrete Mathematics II Spring 017 1 Graphs Defintions 1. Graph: set of N nodes and A arcs such that each a A is associated with an unordered pair of nodes.. Simple graph: no
Reference Sheet for CO14. Discrete Mathematics II Spring 017 1 Graphs Defintions 1. Graph: set of N nodes and A arcs such that each a A is associated with an unordered pair of nodes.. Simple graph: no
Lecturer: Shuchi Chawla Topic: Euclidean TSP (contd.) Date: 2/8/07
 Date: 2/8/07") CS880: Approximations Algorithms Scribe: Dave Andrzejewski Lecturer: Shuchi Chawla Topic: Euclidean TSP (contd.) Date: 2/8/07 Today we continue the discussion of a dynamic programming (DP) approach to
CS880: Approximations Algorithms Scribe: Dave Andrzejewski Lecturer: Shuchi Chawla Topic: Euclidean TSP (contd.) Date: 2/8/07 Today we continue the discussion of a dynamic programming (DP) approach to
Graph Algorithms. Chromatic Polynomials. Graph Algorithms
 Graph Algorithms Chromatic Polynomials Graph Algorithms Chromatic Polynomials Definition G a simple labelled graph with n vertices and m edges. k a positive integer. P G (k) number of different ways of
Graph Algorithms Chromatic Polynomials Graph Algorithms Chromatic Polynomials Definition G a simple labelled graph with n vertices and m edges. k a positive integer. P G (k) number of different ways of
Complexity Results on Graphs with Few Cliques
 Discrete Mathematics and Theoretical Computer Science DMTCS vol. 9, 2007, 127 136 Complexity Results on Graphs with Few Cliques Bill Rosgen 1 and Lorna Stewart 2 1 Institute for Quantum Computing and School
Discrete Mathematics and Theoretical Computer Science DMTCS vol. 9, 2007, 127 136 Complexity Results on Graphs with Few Cliques Bill Rosgen 1 and Lorna Stewart 2 1 Institute for Quantum Computing and School
Graph Theory S 1 I 2 I 1 S 2 I 1 I 2
 Graph Theory S I I S S I I S Graphs Definition A graph G is a pair consisting of a vertex set V (G), and an edge set E(G) ( ) V (G). x and y are the endpoints of edge e = {x, y}. They are called adjacent
Graph Theory S I I S S I I S Graphs Definition A graph G is a pair consisting of a vertex set V (G), and an edge set E(G) ( ) V (G). x and y are the endpoints of edge e = {x, y}. They are called adjacent
1 Dynamic Programming
 CS161 Lecture 13 Dynamic Programming and Greedy Algorithms Scribe by: Eric Huang Date: May 13, 2015 1 Dynamic Programming The idea of dynamic programming is to have a table of solutions of subproblems
CS161 Lecture 13 Dynamic Programming and Greedy Algorithms Scribe by: Eric Huang Date: May 13, 2015 1 Dynamic Programming The idea of dynamic programming is to have a table of solutions of subproblems
CS6402-DESIGN AND ANALYSIS OF ALGORITHM. TWO MARK QUESTION WITH ANSWERS Unit-I. Introduction
 CS6402-DESIGN AND ANALYSIS OF ALGORITHM TWO MARK QUESTION WITH ANSWERS Unit-I Introduction Why is the need of studying algorithms? From a practical standpoint, a standard set of algorithms from different
CS6402-DESIGN AND ANALYSIS OF ALGORITHM TWO MARK QUESTION WITH ANSWERS Unit-I Introduction Why is the need of studying algorithms? From a practical standpoint, a standard set of algorithms from different
2. Optimization problems 6
 6 2.1 Examples... 7... 8 2.3 Convex sets and functions... 9 2.4 Convex optimization problems... 10 2.1 Examples 7-1 An (NP-) optimization problem P 0 is defined as follows Each instance I P 0 has a feasibility
6 2.1 Examples... 7... 8 2.3 Convex sets and functions... 9 2.4 Convex optimization problems... 10 2.1 Examples 7-1 An (NP-) optimization problem P 0 is defined as follows Each instance I P 0 has a feasibility
CS 125 Section #10 Midterm 2 Review 11/5/14
 CS 125 Section #10 Midterm 2 Review 11/5/14 1 Topics Covered This midterm covers up through NP-completeness; countability, decidability, and recognizability will not appear on this midterm. Disclaimer:
CS 125 Section #10 Midterm 2 Review 11/5/14 1 Topics Covered This midterm covers up through NP-completeness; countability, decidability, and recognizability will not appear on this midterm. Disclaimer:
PATH FINDING AND GRAPH TRAVERSAL
 GRAPH TRAVERSAL PATH FINDING AND GRAPH TRAVERSAL Path finding refers to determining the shortest path between two vertices in a graph. We discussed the Floyd Warshall algorithm previously, but you may
GRAPH TRAVERSAL PATH FINDING AND GRAPH TRAVERSAL Path finding refers to determining the shortest path between two vertices in a graph. We discussed the Floyd Warshall algorithm previously, but you may
Bipartite Roots of Graphs
 Bipartite Roots of Graphs Lap Chi Lau Department of Computer Science University of Toronto Graph H is a root of graph G if there exists a positive integer k such that x and y are adjacent in G if and only
Bipartite Roots of Graphs Lap Chi Lau Department of Computer Science University of Toronto Graph H is a root of graph G if there exists a positive integer k such that x and y are adjacent in G if and only
Lecture 7. s.t. e = (u,v) E x u + x v 1 (2) v V x v 0 (3)
 E x u + x v 1 (2) v V x v 0 (3)") COMPSCI 632: Approximation Algorithms September 18, 2017 Lecturer: Debmalya Panigrahi Lecture 7 Scribe: Xiang Wang 1 Overview In this lecture, we will use Primal-Dual method to design approximation algorithms
COMPSCI 632: Approximation Algorithms September 18, 2017 Lecturer: Debmalya Panigrahi Lecture 7 Scribe: Xiang Wang 1 Overview In this lecture, we will use Primal-Dual method to design approximation algorithms
APPROXIMATION ALGORITHMS FOR GEOMETRIC PROBLEMS
 APPROXIMATION ALGORITHMS FOR GEOMETRIC PROBLEMS Subhas C. Nandy (nandysc@isical.ac.in) Advanced Computing and Microelectronics Unit Indian Statistical Institute Kolkata 70010, India. Organization Introduction
APPROXIMATION ALGORITHMS FOR GEOMETRIC PROBLEMS Subhas C. Nandy (nandysc@isical.ac.in) Advanced Computing and Microelectronics Unit Indian Statistical Institute Kolkata 70010, India. Organization Introduction
Questions? You are given the complete graph of Facebook. What questions would you ask? (What questions could we hope to answer?)
") P vs. NP What now? Attribution These slides were prepared for the New Jersey Governor s School course The Math Behind the Machine taught in the summer of 2011 by Grant Schoenebeck Large parts of these
P vs. NP What now? Attribution These slides were prepared for the New Jersey Governor s School course The Math Behind the Machine taught in the summer of 2011 by Grant Schoenebeck Large parts of these
Modules. 6 Hamilton Graphs (4-8 lectures) Introduction Necessary conditions and sufficient conditions Exercises...
 Introduction Necessary conditions and sufficient conditions Exercises...") Modules 6 Hamilton Graphs (4-8 lectures) 135 6.1 Introduction................................ 136 6.2 Necessary conditions and sufficient conditions............. 137 Exercises..................................
Modules 6 Hamilton Graphs (4-8 lectures) 135 6.1 Introduction................................ 136 6.2 Necessary conditions and sufficient conditions............. 137 Exercises..................................
CME 305: Discrete Mathematics and Algorithms Instructor: Reza Zadeh HW#3 Due at the beginning of class Thursday 02/26/15
 CME 305: Discrete Mathematics and Algorithms Instructor: Reza Zadeh (rezab@stanford.edu) HW#3 Due at the beginning of class Thursday 02/26/15 1. Consider a model of a nonbipartite undirected graph in which
CME 305: Discrete Mathematics and Algorithms Instructor: Reza Zadeh (rezab@stanford.edu) HW#3 Due at the beginning of class Thursday 02/26/15 1. Consider a model of a nonbipartite undirected graph in which
CSE 417 Branch & Bound (pt 4) Branch & Bound
 Branch & Bound") CSE 417 Branch & Bound (pt 4) Branch & Bound Reminders > HW8 due today > HW9 will be posted tomorrow start early program will be slow, so debugging will be slow... Review of previous lectures > Complexity
CSE 417 Branch & Bound (pt 4) Branch & Bound Reminders > HW8 due today > HW9 will be posted tomorrow start early program will be slow, so debugging will be slow... Review of previous lectures > Complexity
Greedy algorithms is another useful way for solving optimization problems.
 Greedy Algorithms Greedy algorithms is another useful way for solving optimization problems. Optimization Problems For the given input, we are seeking solutions that must satisfy certain conditions. These
Greedy Algorithms Greedy algorithms is another useful way for solving optimization problems. Optimization Problems For the given input, we are seeking solutions that must satisfy certain conditions. These
Faster parameterized algorithms for Minimum Fill-In
 Faster parameterized algorithms for Minimum Fill-In Hans L. Bodlaender Pinar Heggernes Yngve Villanger Technical Report UU-CS-2008-042 December 2008 Department of Information and Computing Sciences Utrecht
Faster parameterized algorithms for Minimum Fill-In Hans L. Bodlaender Pinar Heggernes Yngve Villanger Technical Report UU-CS-2008-042 December 2008 Department of Information and Computing Sciences Utrecht
CS 598CSC: Approximation Algorithms Lecture date: March 2, 2011 Instructor: Chandra Chekuri
 CS 598CSC: Approximation Algorithms Lecture date: March, 011 Instructor: Chandra Chekuri Scribe: CC Local search is a powerful and widely used heuristic method (with various extensions). In this lecture
CS 598CSC: Approximation Algorithms Lecture date: March, 011 Instructor: Chandra Chekuri Scribe: CC Local search is a powerful and widely used heuristic method (with various extensions). In this lecture
Graph Theory. Connectivity, Coloring, Matching. Arjun Suresh 1. 1 GATE Overflow
 Graph Theory Connectivity, Coloring, Matching Arjun Suresh 1 1 GATE Overflow GO Classroom, August 2018 Thanks to Subarna/Sukanya Das for wonderful figures Arjun, Suresh (GO) Graph Theory GATE 2019 1 /
Graph Theory Connectivity, Coloring, Matching Arjun Suresh 1 1 GATE Overflow GO Classroom, August 2018 Thanks to Subarna/Sukanya Das for wonderful figures Arjun, Suresh (GO) Graph Theory GATE 2019 1 /
Part II. Graph Theory. Year
 Part II Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2017 53 Paper 3, Section II 15H Define the Ramsey numbers R(s, t) for integers s, t 2. Show that R(s, t) exists for all s,
Part II Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2017 53 Paper 3, Section II 15H Define the Ramsey numbers R(s, t) for integers s, t 2. Show that R(s, t) exists for all s,
Artificial Intelligence
 Artificial Intelligence Shortest Path Problem G. Guérard Department of Nouvelles Energies Ecole Supérieur d Ingénieurs Léonard de Vinci Lecture 3 GG A.I. 1/42 Outline 1 The Shortest Path Problem Introduction
Artificial Intelligence Shortest Path Problem G. Guérard Department of Nouvelles Energies Ecole Supérieur d Ingénieurs Léonard de Vinci Lecture 3 GG A.I. 1/42 Outline 1 The Shortest Path Problem Introduction
Graphs: Introduction. Ali Shokoufandeh, Department of Computer Science, Drexel University
 Graphs: Introduction Ali Shokoufandeh, Department of Computer Science, Drexel University Overview of this talk Introduction: Notations and Definitions Graphs and Modeling Algorithmic Graph Theory and Combinatorial
Graphs: Introduction Ali Shokoufandeh, Department of Computer Science, Drexel University Overview of this talk Introduction: Notations and Definitions Graphs and Modeling Algorithmic Graph Theory and Combinatorial
Advanced Methods in Algorithms HW 5
 Advanced Methods in Algorithms HW 5 Written by Pille Pullonen 1 Vertex-disjoint cycle cover Let G(V, E) be a finite, strongly-connected, directed graph. Let w : E R + be a positive weight function dened
Advanced Methods in Algorithms HW 5 Written by Pille Pullonen 1 Vertex-disjoint cycle cover Let G(V, E) be a finite, strongly-connected, directed graph. Let w : E R + be a positive weight function dened
Dominating Set on Bipartite Graphs
 Dominating Set on Bipartite Graphs Mathieu Liedloff Abstract Finding a dominating set of minimum cardinality is an NP-hard graph problem, even when the graph is bipartite. In this paper we are interested
Dominating Set on Bipartite Graphs Mathieu Liedloff Abstract Finding a dominating set of minimum cardinality is an NP-hard graph problem, even when the graph is bipartite. In this paper we are interested
Solutions for the Exam 6 January 2014
 Mastermath and LNMB Course: Discrete Optimization Solutions for the Exam 6 January 2014 Utrecht University, Educatorium, 13:30 16:30 The examination lasts 3 hours. Grading will be done before January 20,
Mastermath and LNMB Course: Discrete Optimization Solutions for the Exam 6 January 2014 Utrecht University, Educatorium, 13:30 16:30 The examination lasts 3 hours. Grading will be done before January 20,
HW Graph Theory SOLUTIONS (hbovik)
") Diestel 1.3: Let G be a graph containing a cycle C, and assume that G contains a path P of length at least k between two vertices of C. Show that G contains a cycle of length at least k. If C has length
Diestel 1.3: Let G be a graph containing a cycle C, and assume that G contains a path P of length at least k between two vertices of C. Show that G contains a cycle of length at least k. If C has length
Problem Set 3. MATH 776, Fall 2009, Mohr. November 30, 2009
 Problem Set 3 MATH 776, Fall 009, Mohr November 30, 009 1 Problem Proposition 1.1. Adding a new edge to a maximal planar graph of order at least 6 always produces both a T K 5 and a T K 3,3 subgraph. Proof.
Problem Set 3 MATH 776, Fall 009, Mohr November 30, 009 1 Problem Proposition 1.1. Adding a new edge to a maximal planar graph of order at least 6 always produces both a T K 5 and a T K 3,3 subgraph. Proof.
11.1. Definitions. 11. Domination in Graphs
 11. Domination in Graphs Some definitions Minimal dominating sets Bounds for the domination number. The independent domination number Other domination parameters. 11.1. Definitions A vertex v in a graph
11. Domination in Graphs Some definitions Minimal dominating sets Bounds for the domination number. The independent domination number Other domination parameters. 11.1. Definitions A vertex v in a graph
CS 311 Discrete Math for Computer Science Dr. William C. Bulko. Graphs
 CS 311 Discrete Math for Computer Science Dr. William C. Bulko Graphs 2014 Definitions Definition: A graph G = (V,E) consists of a nonempty set V of vertices (or nodes) and a set E of edges. Each edge
CS 311 Discrete Math for Computer Science Dr. William C. Bulko Graphs 2014 Definitions Definition: A graph G = (V,E) consists of a nonempty set V of vertices (or nodes) and a set E of edges. Each edge
11. APPROXIMATION ALGORITHMS
 11. APPROXIMATION ALGORITHMS load balancing center selection pricing method: vertex cover LP rounding: vertex cover generalized load balancing knapsack problem Lecture slides by Kevin Wayne Copyright 2005
11. APPROXIMATION ALGORITHMS load balancing center selection pricing method: vertex cover LP rounding: vertex cover generalized load balancing knapsack problem Lecture slides by Kevin Wayne Copyright 2005
Introduction to Algorithms
 Introduction to Algorithms 6.046J/18.401J Lecture 24 Prof. Piotr Indyk Dealing with Hard Problems What to do if: Divide and conquer Dynamic programming Greedy Linear Programming/Network Flows does not
Introduction to Algorithms 6.046J/18.401J Lecture 24 Prof. Piotr Indyk Dealing with Hard Problems What to do if: Divide and conquer Dynamic programming Greedy Linear Programming/Network Flows does not
Communication Networks I December 4, 2001 Agenda Graph theory notation Trees Shortest path algorithms Distributed, asynchronous algorithms Page 1
 Communication Networks I December, Agenda Graph theory notation Trees Shortest path algorithms Distributed, asynchronous algorithms Page Communication Networks I December, Notation G = (V,E) denotes a
Communication Networks I December, Agenda Graph theory notation Trees Shortest path algorithms Distributed, asynchronous algorithms Page Communication Networks I December, Notation G = (V,E) denotes a
Parameterized graph separation problems
 Parameterized graph separation problems Dániel Marx Department of Computer Science and Information Theory, Budapest University of Technology and Economics Budapest, H-1521, Hungary, dmarx@cs.bme.hu Abstract.
Parameterized graph separation problems Dániel Marx Department of Computer Science and Information Theory, Budapest University of Technology and Economics Budapest, H-1521, Hungary, dmarx@cs.bme.hu Abstract.
Kernelization Upper Bounds for Parameterized Graph Coloring Problems
 Kernelization Upper Bounds for Parameterized Graph Coloring Problems Pim de Weijer Master Thesis: ICA-3137910 Supervisor: Hans L. Bodlaender Computing Science, Utrecht University 1 Abstract This thesis
Kernelization Upper Bounds for Parameterized Graph Coloring Problems Pim de Weijer Master Thesis: ICA-3137910 Supervisor: Hans L. Bodlaender Computing Science, Utrecht University 1 Abstract This thesis
6. Algorithm Design Techniques
 6. Algorithm Design Techniques 6. Algorithm Design Techniques 6.1 Greedy algorithms 6.2 Divide and conquer 6.3 Dynamic Programming 6.4 Randomized Algorithms 6.5 Backtracking Algorithms Malek Mouhoub, CS340
6. Algorithm Design Techniques 6. Algorithm Design Techniques 6.1 Greedy algorithms 6.2 Divide and conquer 6.3 Dynamic Programming 6.4 Randomized Algorithms 6.5 Backtracking Algorithms Malek Mouhoub, CS340
Introduction to Approximation Algorithms
 Introduction to Approximation Algorithms Dr. Gautam K. Das Departmet of Mathematics Indian Institute of Technology Guwahati, India gkd@iitg.ernet.in February 19, 2016 Outline of the lecture Background
Introduction to Approximation Algorithms Dr. Gautam K. Das Departmet of Mathematics Indian Institute of Technology Guwahati, India gkd@iitg.ernet.in February 19, 2016 Outline of the lecture Background
Ferianakademie 2010 Course 2: Distance Problems: Theory and Praxis. Distance Labelings. Stepahn M. Günther. September 23, 2010
 Ferianakademie 00 Course : Distance Problems: Theory and Praxis Distance Labelings Stepahn M. Günther September, 00 Abstract Distance labels allow to infer the shortest distance between any two vertices
Ferianakademie 00 Course : Distance Problems: Theory and Praxis Distance Labelings Stepahn M. Günther September, 00 Abstract Distance labels allow to infer the shortest distance between any two vertices
Paths, Flowers and Vertex Cover
 Paths, Flowers and Vertex Cover Venkatesh Raman, M.S. Ramanujan, and Saket Saurabh Presenting: Hen Sender 1 Introduction 2 Abstract. It is well known that in a bipartite (and more generally in a Konig)
Paths, Flowers and Vertex Cover Venkatesh Raman, M.S. Ramanujan, and Saket Saurabh Presenting: Hen Sender 1 Introduction 2 Abstract. It is well known that in a bipartite (and more generally in a Konig)
CS6402 Design and Analysis of Algorithm. 2 Marks Question & Answer UNIT I INTRODUCTION
 CS6402 Design and Analysis of Algorithm 2 Marks Question & Answer UNIT I INTRODUCTION 1. What is performance measurement? Performance measurement is concerned with obtaining the space and the time requirements
CS6402 Design and Analysis of Algorithm 2 Marks Question & Answer UNIT I INTRODUCTION 1. What is performance measurement? Performance measurement is concerned with obtaining the space and the time requirements
Restricted Delivery Problems on a Network. December 17, Abstract
 Restricted Delivery Problems on a Network Esther M. Arkin y, Refael Hassin z and Limor Klein x December 17, 1996 Abstract We consider a delivery problem on a network one is given a network in which nodes
Restricted Delivery Problems on a Network Esther M. Arkin y, Refael Hassin z and Limor Klein x December 17, 1996 Abstract We consider a delivery problem on a network one is given a network in which nodes
A graph is finite if its vertex set and edge set are finite. We call a graph with just one vertex trivial and all other graphs nontrivial.
 2301-670 Graph theory 1.1 What is a graph? 1 st semester 2550 1 1.1. What is a graph? 1.1.2. Definition. A graph G is a triple (V(G), E(G), ψ G ) consisting of V(G) of vertices, a set E(G), disjoint from
2301-670 Graph theory 1.1 What is a graph? 1 st semester 2550 1 1.1. What is a graph? 1.1.2. Definition. A graph G is a triple (V(G), E(G), ψ G ) consisting of V(G) of vertices, a set E(G), disjoint from
Some Hardness Proofs
 Some Hardness Proofs Magnus Lie Hetland January 2011 This is a very brief overview of some well-known hard (NP Hard and NP complete) problems, and the main ideas behind their hardness proofs. The document
Some Hardness Proofs Magnus Lie Hetland January 2011 This is a very brief overview of some well-known hard (NP Hard and NP complete) problems, and the main ideas behind their hardness proofs. The document
P and NP (Millenium problem)
") CMPS 2200 Fall 2017 P and NP (Millenium problem) Carola Wenk Slides courtesy of Piotr Indyk with additions by Carola Wenk CMPS 2200 Introduction to Algorithms 1 We have seen so far Algorithms for various
CMPS 2200 Fall 2017 P and NP (Millenium problem) Carola Wenk Slides courtesy of Piotr Indyk with additions by Carola Wenk CMPS 2200 Introduction to Algorithms 1 We have seen so far Algorithms for various
CS 580: Algorithm Design and Analysis. Jeremiah Blocki Purdue University Spring 2018
 CS 580: Algorithm Design and Analysis Jeremiah Blocki Purdue University Spring 2018 Chapter 11 Approximation Algorithms Slides by Kevin Wayne. Copyright @ 2005 Pearson-Addison Wesley. All rights reserved.
CS 580: Algorithm Design and Analysis Jeremiah Blocki Purdue University Spring 2018 Chapter 11 Approximation Algorithms Slides by Kevin Wayne. Copyright @ 2005 Pearson-Addison Wesley. All rights reserved.
Important separators and parameterized algorithms
 Important separators and parameterized algorithms Dániel Marx 1 1 Institute for Computer Science and Control, Hungarian Academy of Sciences (MTA SZTAKI) Budapest, Hungary PCSS 2017 Vienna, Austria September
Important separators and parameterized algorithms Dániel Marx 1 1 Institute for Computer Science and Control, Hungarian Academy of Sciences (MTA SZTAKI) Budapest, Hungary PCSS 2017 Vienna, Austria September
Ton Kloks and Yue-Li Wang. Advances in Graph Algorithms. October 10, y X z
 Ton Kloks and Yue-Li Wang Advances in Graph Algorithms October 10, 2013 x Z Y < y X z
Ton Kloks and Yue-Li Wang Advances in Graph Algorithms October 10, 2013 x Z Y < y X z
Chapter Design Techniques for Approximation Algorithms
 Chapter 2 Design Techniques for Approximation Algorithms I N THE preceding chapter we observed that many relevant optimization problems are NP-hard, and that it is unlikely that we will ever be able to
Chapter 2 Design Techniques for Approximation Algorithms I N THE preceding chapter we observed that many relevant optimization problems are NP-hard, and that it is unlikely that we will ever be able to
Practice Final Exam 1
 Algorithm esign Techniques Practice Final xam Instructions. The exam is hours long and contains 6 questions. Write your answers clearly. You may quote any result/theorem seen in the lectures or in the
Algorithm esign Techniques Practice Final xam Instructions. The exam is hours long and contains 6 questions. Write your answers clearly. You may quote any result/theorem seen in the lectures or in the
University of New Mexico Department of Computer Science. Final Examination. CS 362 Data Structures and Algorithms Spring, 2006
 University of New Mexico Department of Computer Science Final Examination CS 6 Data Structures and Algorithms Spring, 006 Name: Email: Print your name and email, neatly in the space provided above; print
University of New Mexico Department of Computer Science Final Examination CS 6 Data Structures and Algorithms Spring, 006 Name: Email: Print your name and email, neatly in the space provided above; print
Notes for Lecture 24
 U.C. Berkeley CS170: Intro to CS Theory Handout N24 Professor Luca Trevisan December 4, 2001 Notes for Lecture 24 1 Some NP-complete Numerical Problems 1.1 Subset Sum The Subset Sum problem is defined
U.C. Berkeley CS170: Intro to CS Theory Handout N24 Professor Luca Trevisan December 4, 2001 Notes for Lecture 24 1 Some NP-complete Numerical Problems 1.1 Subset Sum The Subset Sum problem is defined
Algebraic method for Shortest Paths problems
 Lecture 1 (06.03.2013) Author: Jaros law B lasiok Algebraic method for Shortest Paths problems 1 Introduction In the following lecture we will see algebraic algorithms for various shortest-paths problems.
Lecture 1 (06.03.2013) Author: Jaros law B lasiok Algebraic method for Shortest Paths problems 1 Introduction In the following lecture we will see algebraic algorithms for various shortest-paths problems.
Module 6 NP-Complete Problems and Heuristics
 Module 6 NP-Complete Problems and Heuristics Dr. Natarajan Meghanathan Professor of Computer Science Jackson State University Jackson, MS 97 E-mail: natarajan.meghanathan@jsums.edu Optimization vs. Decision
Module 6 NP-Complete Problems and Heuristics Dr. Natarajan Meghanathan Professor of Computer Science Jackson State University Jackson, MS 97 E-mail: natarajan.meghanathan@jsums.edu Optimization vs. Decision
CME 305: Discrete Mathematics and Algorithms Instructor: Reza Zadeh HW#3 Due at the beginning of class Thursday 03/02/17
 CME 305: Discrete Mathematics and Algorithms Instructor: Reza Zadeh (rezab@stanford.edu) HW#3 Due at the beginning of class Thursday 03/02/17 1. Consider a model of a nonbipartite undirected graph in which
CME 305: Discrete Mathematics and Algorithms Instructor: Reza Zadeh (rezab@stanford.edu) HW#3 Due at the beginning of class Thursday 03/02/17 1. Consider a model of a nonbipartite undirected graph in which