Human pose estimation using Active Shape Models
|
|
|
- Edward Wright
- 6 years ago
- Views:
Transcription
1 Human pose estimation using Active Shape Models Changhyuk Jang and Keechul Jung Abstract Human pose estimation can be executed using Active Shape Models. The existing techniques for applying to human-body research using Active Shape Models, such as human detection, primarily take the form of silhouette of human body. This technique is not able to estimate accurately for human pose to concern two arms and legs, as the silhouette of human body represents the shape as out of round. To solve this problem, we applied the human body model as stick-figure, skeleton. The skeleton model of human body can give consideration to various shapes of human pose. To obtain effective estimation result, we applied background subtraction and deformed matching algorithm of primary Active Shape Models in the fitting process. The images which were used to make the model were 600 human bodies, and the model has 17 landmark points which indicate body junction and key features of human pose. The maximum iteration for the fitting process was 30 times and the execution time was less than.03 sec.. Keywords Active Shape Models, skeleton, pose estimation. M I. INTRODUCTION arkerless human motion analysis has been researched over the last few years. The significant research effort in this domain has been motivated that many application areas, including surveillance, Human-Computer Interaction and automatic annotation, will benefit from a robust solution. Human pose estimation is split up into model-based and model-free, depending upon whether a prior information about the object shape is employed [1]. Model-free approaches do not assume a prior human body model and this designates bottom-up or data-driven methods. The image data which includes a human pose is examined at a low level, looking for local structures such as edges or regions, which are assembled into groups in an attempt to identify objects of interest. Without a global model, this approach is difficult and prone to failure [2]. Model-based approaches make use of a prior model of what is expected in the image, and typically attempt to find the best match of the model to the data in a new image. Prior knowledge of the problem can be used to resolve the potential confusion caused by structural complexity, provide tolerance to noisy or missing data, and provide a means of labeling the recovered structures [1],[8]. In this paper, for concerning the merits of model-based method, we propose novel approach about the model-based C. Jang is with the Department of Media, Graduate school of Soongsil University, Seoul, KOREA ( luee@ ssu.ac.kr). K. Jung is with the Department of Media, Graduate school of Soongsil University, Seoul, KOREA (corresponding author to provide phone: ; fax: ; kcjung@ ssu.ac.kr). pose estimation of human body using Active Shape Models that the model was made by stick-figure, Skeleton. Model-based approaches use a human body model, which includes the kinematic structure (the skeleton), consisting of segments that are linked by joints. D.Shi et al. proposed Handwritten Chinese Radical Recognition using Active Shape Models [4]. This method considered the model as stick-figure for Chinese character which similar to body skeleton. The Active Shape Models, a representative method of model-based approaches, has been applied for many areas, including medical science and face analysis. Cootes et al. proposed Active Shape Models to capture shape variations in an iterative search procedure, capable of locating the modeled structures in noisy, cluttered images even if partially occluded [1]. The method which is proposed in this paper is divided into two processes which are the training and fitting process. The approach follows that described in Cootes et al. to which the reader is directed for details [8]. The proposed method solves the problem that the existing techniques which take the form of silhouette of human body could not estimate accurately the various human poses. We added the background subtraction for the input image that the profile normal of each landmark concerns the pixel information only for the white and black color. And the end part of the arm and leg profile normal has four directions to find the best suited position of the landmark. The maximum iteration for the matching process was 30 times and the execution time was less than.03 sec.. This paper is organized as follow. Section 2 describes the method of making the skeleton model of human body using Active Shape Models. Section 3 describes matching method of transformed primary algorithm of Active Shape Models. Section 4 describes the results of proposed method of human pose estimation. We conclude in section 5. II. SKELETON MODEL In this section we outline how our body-skeleton models are generated. Model-based approach which estimates the human body has the prior knowledge about the human body. The model which is used to the pose estimation is classed as stick-figure and volumetric ones as its application [1]. The volumetric ones which is formed body silhouette have used body tracking [3], [5]. However, this method is not suited to pose estimation purpose as the human body has two arms and legs which make manifold shape. The silhouette of human body could not recognize accurate human pose. The stick-figure one, skeleton, estimates the human body accurately than volumetric ones [6]. The pose which shows hand up or legs 530

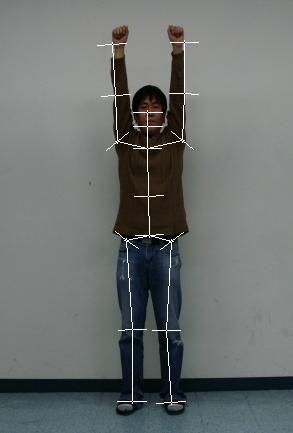
![For 2D objects, the skeleton is related to the medial-axis of the 2D picture [7]. The approach follows that described in Cootes et al. to which the reader is directed for details [8].](/docs-images/75/71999593/images/2-1.jpg "The models are generated by a model of body shape variation. The models are trained on 600 body images, each labeled with 17 landmark points representing the positions of key features. Fig.")
 shows the landmark points. (a) (b) Fig.")
2 apart can be recognized the use of skeleton. For this reason, we make the human body model like skeleton for the accurate pose estimation. The first step in the skeleton-based 2D matching is computing the skeleton. The term skeleton has many meanings. It generally refers to a stick-figure like representation of an object. For 2D objects, the skeleton is related to the medial-axis of the 2D picture [7]. The approach follows that described in Cootes et al. to which the reader is directed for details [8]. The models are generated by a model of body shape variation. The models are trained on 600 body images, each labeled with 17 landmark points representing the positions of key features. Fig.1 shows the whole landmark points and the mean shape of the model. We manually pointed each landmark to obtain the information of human body in the image. The landmark indicates the junction of the body and special position. The point of white color in the Fig. 1(a) shows the landmark points. (a) (b) Fig. 1 Making mean shape model using the position information of landmark point: (a) landmark point, (b) mean shape model. The coordinates of the skeleton points for each training image are stored and analyzed statistically, to extract characteristic shape variations. As the analysis of shape variations, the alignment of the set of training shapes is executed. The alignment is achieved by scaling, rotating and translating the training shapes so that they corresponded as closely as possible with each other. The alignment is performed in a way that minimized the sum of squared distances between equivalent points on different training shapes. Fig. 2 shows the distribution of 600 images in the same frame and the aligned whole landmark points. Fig images: landmark points and aligned form. Each of the aligned training shapes gave rise to a vector X describing the n points. We can represent the 17 landmark points,, for a single example as the 2n element vector, where, i = 1,N (1) T is the transpose operator; and N is the number of training shapes. The mean shape vector is calculated as = (2) The modes of variations, i.e. the ways in which the points of the shape tend to move together, can be found by applying a principal components analysis to the deviations from the mean (i 1,,N) (3) From these deviations, the 2n calculated as 2n covariance matrix S can be S (4) The modes of variation of the point of the shape can be described by the 2n unit eigenvectors,,, and the corresponding 2n eigenvalues,,,, of S. The principal component corresponding to the vector is defined as a weighed sum of the elements of this vector ), i=1,,n, k=1,,2n (5) The principal components represent a linear independent decomposition of the variation of the training shape. The first principal component, which is associated with the largest eigenvalue, describes the largest part of the shape variation. The proportion of the total shape variance described by the principal component is equal to the. Most of the variation can usually be represented by a small number of principal components, say t (t<2n). The value of t can be chosen in such a way that the first t principal components explain a sufficiently large proportion (98%) of the total variance of the training shapes. The total variance is defined as and the proportion of 3 principal components is obtained The shape in the aligned training set can be approximated as a sum of the mean shape: (6),,N (7) where P = ( ) is a matrix of the first t eigenvectors, and = is a vector of principal components, which is calculated as, i = 1,,N (8) 531

![In the medical science, the Active Shape Models was used to segment or find special objects [9]-[11]. Also the model is applied to the tracking system in the image process [3], [5].](/docs-images/75/71999593/images/3-1.jpg "These research applied the primary algorithm which was originally composed of the Active Shape Models.")
).")
3 Equation (8) permits the generation of a new shape example by replacing with a new vector of weight values, =. III. SKELETON MATCHING The Active Shape Models has its own algorithm to match the shape model for input image. In the various researches, we can find the application of Active Shape Models. In the medical science, the Active Shape Models was used to segment or find special objects [9]-[11]. Also the model is applied to the tracking system in the image process [3], [5]. These research applied the primary algorithm which was originally composed of the Active Shape Models. The shape model has profile normal for each landmark that it can find the best suited position of each landmark. The profile normal is a perpendicular line of the landmark which indicates pixel information to the boundary (Fig. 1 (b)). In the face research, the Active Shape Models can use the primary method to match the model for the input image [12], [13]. However, it is a laborious task for applying the pose estimation of human body that the method which is used to the case of face has regard for the pixel information of near landmark. The human body has various pixel information rather than the face as the human can put on the cloth as different color. Also, the profile normal has a limitation to find the best suited position of the landmark for the pose estimation as the skeleton model. In the face experiment, the model which forms an oval figure generally transforms one direction that the landmarks change the position for inside to out or reverse direction following the line of profile normal. Fig.3 shows the inaccurate results using the primary algorithm of Active Shape Models. In this figure, we applied the primary algorithm of Active Shape Models, and the end part of the arm and leg of the skeleton model was not accurately fitted the human body. Fig. 3 Inaccurate results. As the pose estimation, the human body has various pose (hands up and down, legs apart and stretch out, etc.). Each landmark has to be considered various directions than the case of face experiment. For this reason, we added the background subtraction for the input image that the profile normal of each landmark finds the pixel information only for the white and black color. And the end part of the arm and leg profile normal has four directions to find the best suited position of the landmark. The algorithm for fitting is: Step 1 initialize the shape parameters,, to zero (the mean skeleton model). Step 2 accord the center (background subtraction position and the mean skeleton model). Step 3 generate the model instance Step 4 find each landmark, in background subtraction region (find the pose parameters). Step 5 update the model parameters to match to Step 6 apply constraints on. Step 7 If not fitted, return to Step 4. Fig. 4 shows the fitting process of the input image using skeleton model. We did experiment background subtraction manually. Fig. 4 Fitting process. IV. EXPERIMENTAL RESULT We concerned frontal image of human body and experimented this research using Pentium(R) 4 CPU 3.00GHz, 2.00GB RAM. We made the 600 images for this research and used the implementation code to make the skeleton model in the training process [14]. In the fitting process, we did manually experiment background subtraction and made the fitting algorithm deformed to obtain effective results. From the experiment, we obtained 3 principal components. Table I shows the proportion of principal axis. TABLE I 3 PRINCIPAL COMPONENTS. Shape mode variation % (80.62%) % (93.3%) % (97.32%) 532
4 Fig. 5 shows the results of pose estimation using Active Shape Models. We made the skeleton model concerning the frontal pose images (e.g., two hands up or two legs apart in the same time ). The proposed approach has been successfully tested on the frontal human poses. Also our research does not undergo influences of the illumination as the use of background subtraction not the texture or skin color of human body in the fitting process. In the fitting process, the maximum iteration was 30 times and the execution time was less than 0.03 sec.. However, we did not concern the whole human poses that stoop down, raise one hand, and raise one leg. As this reason, the proposed method could not estimate the pose which is not included in the training process. The matching results of the model can be used for further processing, such as for measurement or classification. Ongoing work focuses on the various human poses and the different view point of human pose. V. CONCLUTION This paper proposed novel approach about the model-based pose estimation of human body using Active Shape Models that the model was made by stick-figure, Skeleton. Model-based approaches use a human body model, which includes the kinematic structure (the skeleton), consisting of segments that are linked by joints. We obtained the potentiality applying for the representative model-based method, Active Shape Models, for human pose estimation. However, our research did not experiment the various human poses. Future work will explore the various view points of human pose and more effective matching algorithm of pose estimation. REFERENCES [1] R. Poppe Vision-based human motion analysis: An overview Computer Vision and Image Understanding, vol. 108, 2007, pp [2] T. F. Cootes, C. J. Taylor, Statistical Models of Appearance for Computer Vision, _models.pdf. [3] D. Kim, V. Maik, D. Lee, J. Shin, and J. Paik, Active Shape model-based object tracking in panoramic Video, Proc. ICCS, LNCS, vol. 3994, pp , [4] D. Shi, S. R. Gumm, and R. I. Damper, Handwritten Chinese Radical Recognition Using Nonlinear Active Shape Models, IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, vol. 25, no. 2, pp , [5] A. M. Baumberg, and D. C. Hogg, An Efficient Method for Contour Tracking using Active Shape Models, Motion of Non-Rigid and Articulated Objects, Proceedings of the 1994 IEEE, pp [6] H. Sunder, D. Silver, N. Gagvani, and S. Dickinson, Skeleton Based Shape Matching and Retrieval, Shape Modeling International, pp , 2003 [7] H. Blum, A Transformation for Extracting New Descriptors of Shape, Computer Vision and Image Understanding: MIT press, pp , [8] T. F. Cootes, C. J. Taylor, D. H. Cooper, and J. Graham, Active Shape Models-Their Training and Application Computer Vision and Image Understanding, vol. 61, pp , [9] B. V. Ginneken, A. F. Frangi, J. J. Staal, B. H. Romeny, and M. A. Viergever, Active Shape Model Segmentation With Optimal Features, IEEE TRANSACTIONS ON MEDICAL IMAGING, vol. 21, no. 8, pp , 2002 [10] H. H. Thodberg, and A. Rosholm, Application of the active shape model in a commercial medical device for bone densitometry, Image and Vision Computing, vol. 21, pp , [11] T. F. Cootes, A. Hill, C. T. Taylor, and J. Haslam, The use of Active Shape Models For Locating Structures in Medical Images, Image and Vision Computing, vol. 12, no. 6, pp , [12] W. Wang, S. Shan, W. Gao, B. Cao, and B. Yin, An Improved Active Shape Model for Face Alignment, Proceedings of the Fourth IEEE International Conference on Multimodal Interfaces, pp , [13] S. Romdhani, S. Gong, and A. Psarrou, A Multi-View Nonlinear Active Shape Model Using Kernel PCA, BMVC99, pp [14] M. B. Stegmann, The AAM-API: An Open Source Active Appearance Model Implementation Informatics and Mathematical Modelling, Technical University of Denmark, 533

5 P1 P2 P3 P4 Fig. 5 Experimental results. 534
An Adaptive Eigenshape Model
 An Adaptive Eigenshape Model Adam Baumberg and David Hogg School of Computer Studies University of Leeds, Leeds LS2 9JT, U.K. amb@scs.leeds.ac.uk Abstract There has been a great deal of recent interest
An Adaptive Eigenshape Model Adam Baumberg and David Hogg School of Computer Studies University of Leeds, Leeds LS2 9JT, U.K. amb@scs.leeds.ac.uk Abstract There has been a great deal of recent interest
Sparse Shape Registration for Occluded Facial Feature Localization
 Shape Registration for Occluded Facial Feature Localization Fei Yang, Junzhou Huang and Dimitris Metaxas Abstract This paper proposes a sparsity driven shape registration method for occluded facial feature
Shape Registration for Occluded Facial Feature Localization Fei Yang, Junzhou Huang and Dimitris Metaxas Abstract This paper proposes a sparsity driven shape registration method for occluded facial feature
Nonrigid Surface Modelling. and Fast Recovery. Department of Computer Science and Engineering. Committee: Prof. Leo J. Jia and Prof. K. H.
 Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Enhanced Active Shape Models with Global Texture Constraints for Image Analysis
 Enhanced Active Shape Models with Global Texture Constraints for Image Analysis Shiguang Shan, Wen Gao, Wei Wang, Debin Zhao, Baocai Yin Institute of Computing Technology, Chinese Academy of Sciences,
Enhanced Active Shape Models with Global Texture Constraints for Image Analysis Shiguang Shan, Wen Gao, Wei Wang, Debin Zhao, Baocai Yin Institute of Computing Technology, Chinese Academy of Sciences,
A Dynamic Human Model using Hybrid 2D-3D Representations in Hierarchical PCA Space
 A Dynamic Human Model using Hybrid 2D-3D Representations in Hierarchical PCA Space Eng-Jon Ong and Shaogang Gong Department of Computer Science, Queen Mary and Westfield College, London E1 4NS, UK fongej
A Dynamic Human Model using Hybrid 2D-3D Representations in Hierarchical PCA Space Eng-Jon Ong and Shaogang Gong Department of Computer Science, Queen Mary and Westfield College, London E1 4NS, UK fongej
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Statistical Models for Shape and Appearance Note some material for these slides came from Algorithms
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Statistical Models for Shape and Appearance Note some material for these slides came from Algorithms
Generic Face Alignment Using an Improved Active Shape Model
 Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
On-line, Incremental Learning of a Robust Active Shape Model
 On-line, Incremental Learning of a Robust Active Shape Model Michael Fussenegger 1, Peter M. Roth 2, Horst Bischof 2, Axel Pinz 1 1 Institute of Electrical Measurement and Measurement Signal Processing
On-line, Incremental Learning of a Robust Active Shape Model Michael Fussenegger 1, Peter M. Roth 2, Horst Bischof 2, Axel Pinz 1 1 Institute of Electrical Measurement and Measurement Signal Processing
Automated Pivot Location for the Cartesian-Polar Hybrid Point Distribution Model
 Automated Pivot Location for the Cartesian-Polar Hybrid Point Distribution Model Tony Heap and David Hogg School of Computer Studies, University of Leeds, Leeds LS2 9JT, UK email: ajh@scs.leeds.ac.uk Abstract
Automated Pivot Location for the Cartesian-Polar Hybrid Point Distribution Model Tony Heap and David Hogg School of Computer Studies, University of Leeds, Leeds LS2 9JT, UK email: ajh@scs.leeds.ac.uk Abstract
Face Alignment Under Various Poses and Expressions
 Face Alignment Under Various Poses and Expressions Shengjun Xin and Haizhou Ai Computer Science and Technology Department, Tsinghua University, Beijing 100084, China ahz@mail.tsinghua.edu.cn Abstract.
Face Alignment Under Various Poses and Expressions Shengjun Xin and Haizhou Ai Computer Science and Technology Department, Tsinghua University, Beijing 100084, China ahz@mail.tsinghua.edu.cn Abstract.
DISTANCE MAPS: A ROBUST ILLUMINATION PREPROCESSING FOR ACTIVE APPEARANCE MODELS
 DISTANCE MAPS: A ROBUST ILLUMINATION PREPROCESSING FOR ACTIVE APPEARANCE MODELS Sylvain Le Gallou*, Gaspard Breton*, Christophe Garcia*, Renaud Séguier** * France Telecom R&D - TECH/IRIS 4 rue du clos
DISTANCE MAPS: A ROBUST ILLUMINATION PREPROCESSING FOR ACTIVE APPEARANCE MODELS Sylvain Le Gallou*, Gaspard Breton*, Christophe Garcia*, Renaud Séguier** * France Telecom R&D - TECH/IRIS 4 rue du clos
AAM Based Facial Feature Tracking with Kinect
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No 3 Sofia 2015 Print ISSN: 1311-9702; Online ISSN: 1314-4081 DOI: 10.1515/cait-2015-0046 AAM Based Facial Feature Tracking
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No 3 Sofia 2015 Print ISSN: 1311-9702; Online ISSN: 1314-4081 DOI: 10.1515/cait-2015-0046 AAM Based Facial Feature Tracking
Automatic Gait Recognition. - Karthik Sridharan
 Automatic Gait Recognition - Karthik Sridharan Gait as a Biometric Gait A person s manner of walking Webster Definition It is a non-contact, unobtrusive, perceivable at a distance and hard to disguise
Automatic Gait Recognition - Karthik Sridharan Gait as a Biometric Gait A person s manner of walking Webster Definition It is a non-contact, unobtrusive, perceivable at a distance and hard to disguise
Image Coding with Active Appearance Models
 Image Coding with Active Appearance Models Simon Baker, Iain Matthews, and Jeff Schneider CMU-RI-TR-03-13 The Robotics Institute Carnegie Mellon University Abstract Image coding is the task of representing
Image Coding with Active Appearance Models Simon Baker, Iain Matthews, and Jeff Schneider CMU-RI-TR-03-13 The Robotics Institute Carnegie Mellon University Abstract Image coding is the task of representing
Occlusion Detection of Real Objects using Contour Based Stereo Matching
 Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
ICA vs. PCA Active Appearance Models: Application to Cardiac MR Segmentation
 ICA vs. PCA Active Appearance Models: Application to Cardiac MR Segmentation M. Üzümcü 1, A.F. Frangi 2, M. Sonka 3, J.H.C. Reiber 1, B.P.F. Lelieveldt 1 1 Div. of Image Processing, Dept. of Radiology
ICA vs. PCA Active Appearance Models: Application to Cardiac MR Segmentation M. Üzümcü 1, A.F. Frangi 2, M. Sonka 3, J.H.C. Reiber 1, B.P.F. Lelieveldt 1 1 Div. of Image Processing, Dept. of Radiology
Graph-based High Level Motion Segmentation using Normalized Cuts
 Graph-based High Level Motion Segmentation using Normalized Cuts Sungju Yun, Anjin Park and Keechul Jung Abstract Motion capture devices have been utilized in producing several contents, such as movies
Graph-based High Level Motion Segmentation using Normalized Cuts Sungju Yun, Anjin Park and Keechul Jung Abstract Motion capture devices have been utilized in producing several contents, such as movies
Automatic Modelling Image Represented Objects Using a Statistic Based Approach
 Automatic Modelling Image Represented Objects Using a Statistic Based Approach Maria João M. Vasconcelos 1, João Manuel R. S. Tavares 1,2 1 FEUP Faculdade de Engenharia da Universidade do Porto 2 LOME
Automatic Modelling Image Represented Objects Using a Statistic Based Approach Maria João M. Vasconcelos 1, João Manuel R. S. Tavares 1,2 1 FEUP Faculdade de Engenharia da Universidade do Porto 2 LOME
Body Trunk Shape Estimation from Silhouettes by Using Homologous Human Body Model
 Body Trunk Shape Estimation from Silhouettes by Using Homologous Human Body Model Shunta Saito* a, Makiko Kochi b, Masaaki Mochimaru b, Yoshimitsu Aoki a a Keio University, Yokohama, Kanagawa, Japan; b
Body Trunk Shape Estimation from Silhouettes by Using Homologous Human Body Model Shunta Saito* a, Makiko Kochi b, Masaaki Mochimaru b, Yoshimitsu Aoki a a Keio University, Yokohama, Kanagawa, Japan; b
An Automatic Face Identification System Using Flexible Appearance Models
 An Automatic Face Identification System Using Flexible Appearance Models A. Lanitis, C.J.Taylor and T.F.Cootes Dpt. of Medical Biophysics, University of Manchester email: lan@wiau.mb.man.ac.uk We describe
An Automatic Face Identification System Using Flexible Appearance Models A. Lanitis, C.J.Taylor and T.F.Cootes Dpt. of Medical Biophysics, University of Manchester email: lan@wiau.mb.man.ac.uk We describe
3D Active Appearance Model for Aligning Faces in 2D Images
 3D Active Appearance Model for Aligning Faces in 2D Images Chun-Wei Chen and Chieh-Chih Wang Abstract Perceiving human faces is one of the most important functions for human robot interaction. The active
3D Active Appearance Model for Aligning Faces in 2D Images Chun-Wei Chen and Chieh-Chih Wang Abstract Perceiving human faces is one of the most important functions for human robot interaction. The active
3D Pose Estimation of Cactus Leaves using an Active Shape Model
 3D Pose Estimation of Cactus Leaves using an Active Shape Model Thomas B. Moeslund, Michael Aagaard, Dennis Lerche Laboratory of Computer Vision and Media Technology Aalborg University, Denmark E-mail:
3D Pose Estimation of Cactus Leaves using an Active Shape Model Thomas B. Moeslund, Michael Aagaard, Dennis Lerche Laboratory of Computer Vision and Media Technology Aalborg University, Denmark E-mail:
Facial Expressions Recognition from Image Sequences
 Facial Expressions Recognition from Image Sequences Zahid Riaz, Christoph Mayer, Michael Beetz and Bernd Radig Department of Informatics, Technische Universität München, D-85748 Garching, Germany Abstract.
Facial Expressions Recognition from Image Sequences Zahid Riaz, Christoph Mayer, Michael Beetz and Bernd Radig Department of Informatics, Technische Universität München, D-85748 Garching, Germany Abstract.
Coarse-to-Fine Statistical Shape Model by Bayesian Inference
 Coarse-to-Fine Statistical Shape Model by Bayesian Inference Ran He, Stan Li, Zhen Lei and ShengCai Liao Institute of Automation, Chinese Academy of Sciences, Beijing, China. {rhe@nlpr.ia.ac.cn} Abstract.
Coarse-to-Fine Statistical Shape Model by Bayesian Inference Ran He, Stan Li, Zhen Lei and ShengCai Liao Institute of Automation, Chinese Academy of Sciences, Beijing, China. {rhe@nlpr.ia.ac.cn} Abstract.
Announcements. Recognition I. Gradient Space (p,q) What is the reflectance map?
 What is the reflectance map?") Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Application of the Active Shape Model in a commercial medical device for bone densitometry
 Application of the Active Shape Model in a commercial medical device for bone densitometry H. H. Thodberg and A. Rosholm, Pronosco, Kohavevej 5, 2950 Vedbaek, Denmark hht@pronosco.com Abstract Osteoporosis
Application of the Active Shape Model in a commercial medical device for bone densitometry H. H. Thodberg and A. Rosholm, Pronosco, Kohavevej 5, 2950 Vedbaek, Denmark hht@pronosco.com Abstract Osteoporosis
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction
 Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Illumination Invariant Face Alignment Using Multi-band Active Appearance Model
 Illumination Invariant Face Alignment Using Multi-band Active Appearance Model Fatih Kahraman 1 and Muhittin Gökmen 2 1 Istanbul Technical University, Institute of Informatics, Computer Science, 80626
Illumination Invariant Face Alignment Using Multi-band Active Appearance Model Fatih Kahraman 1 and Muhittin Gökmen 2 1 Istanbul Technical University, Institute of Informatics, Computer Science, 80626
Enhance ASMs Based on AdaBoost-Based Salient Landmarks Localization and Confidence-Constraint Shape Modeling
 Enhance ASMs Based on AdaBoost-Based Salient Landmarks Localization and Confidence-Constraint Shape Modeling Zhiheng Niu 1, Shiguang Shan 2, Xilin Chen 1,2, Bingpeng Ma 2,3, and Wen Gao 1,2,3 1 Department
Enhance ASMs Based on AdaBoost-Based Salient Landmarks Localization and Confidence-Constraint Shape Modeling Zhiheng Niu 1, Shiguang Shan 2, Xilin Chen 1,2, Bingpeng Ma 2,3, and Wen Gao 1,2,3 1 Department
Extract an Essential Skeleton of a Character as a Graph from a Character Image
 Extract an Essential Skeleton of a Character as a Graph from a Character Image Kazuhisa Fujita University of Electro-Communications 1-5-1 Chofugaoka, Chofu, Tokyo, 182-8585 Japan k-z@nerve.pc.uec.ac.jp
Extract an Essential Skeleton of a Character as a Graph from a Character Image Kazuhisa Fujita University of Electro-Communications 1-5-1 Chofugaoka, Chofu, Tokyo, 182-8585 Japan k-z@nerve.pc.uec.ac.jp
Facial Feature Points Tracking Based on AAM with Optical Flow Constrained Initialization
 Journal of Pattern Recognition Research 7 (2012) 72-79 Received Oct 24, 2011. Revised Jan 16, 2012. Accepted Mar 2, 2012. Facial Feature Points Tracking Based on AAM with Optical Flow Constrained Initialization
Journal of Pattern Recognition Research 7 (2012) 72-79 Received Oct 24, 2011. Revised Jan 16, 2012. Accepted Mar 2, 2012. Facial Feature Points Tracking Based on AAM with Optical Flow Constrained Initialization
Model Based Analysis of Face Images for Facial Feature Extraction
 Model Based Analysis of Face Images for Facial Feature Extraction Zahid Riaz, Christoph Mayer, Michael Beetz, and Bernd Radig Technische Universität München, Boltzmannstr. 3, 85748 Garching, Germany {riaz,mayerc,beetz,radig}@in.tum.de
Model Based Analysis of Face Images for Facial Feature Extraction Zahid Riaz, Christoph Mayer, Michael Beetz, and Bernd Radig Technische Universität München, Boltzmannstr. 3, 85748 Garching, Germany {riaz,mayerc,beetz,radig}@in.tum.de
Object and Action Detection from a Single Example
 Object and Action Detection from a Single Example Peyman Milanfar* EE Department University of California, Santa Cruz *Joint work with Hae Jong Seo AFOSR Program Review, June 4-5, 29 Take a look at this:
Object and Action Detection from a Single Example Peyman Milanfar* EE Department University of California, Santa Cruz *Joint work with Hae Jong Seo AFOSR Program Review, June 4-5, 29 Take a look at this:
PCA Based 3D Shape Reconstruction of Human Foot Using Multiple Viewpoint Cameras
 PCA Based 3D Shape Reconstruction of Human Foot Using Multiple Viewpoint Cameras Edmée Amstutz 1, Tomoaki Teshima 1, Makoto Kimura 2, Masaaki Mochimaru 2, and Hideo Saito 1 1 Graduate School of Science
PCA Based 3D Shape Reconstruction of Human Foot Using Multiple Viewpoint Cameras Edmée Amstutz 1, Tomoaki Teshima 1, Makoto Kimura 2, Masaaki Mochimaru 2, and Hideo Saito 1 1 Graduate School of Science
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
Face detection and recognition. Many slides adapted from K. Grauman and D. Lowe
 Face detection and recognition Many slides adapted from K. Grauman and D. Lowe Face detection and recognition Detection Recognition Sally History Early face recognition systems: based on features and distances
Face detection and recognition Many slides adapted from K. Grauman and D. Lowe Face detection and recognition Detection Recognition Sally History Early face recognition systems: based on features and distances
An Automated Image-based Method for Multi-Leaf Collimator Positioning Verification in Intensity Modulated Radiation Therapy
 An Automated Image-based Method for Multi-Leaf Collimator Positioning Verification in Intensity Modulated Radiation Therapy Chenyang Xu 1, Siemens Corporate Research, Inc., Princeton, NJ, USA Xiaolei Huang,
An Automated Image-based Method for Multi-Leaf Collimator Positioning Verification in Intensity Modulated Radiation Therapy Chenyang Xu 1, Siemens Corporate Research, Inc., Princeton, NJ, USA Xiaolei Huang,
Hand Gesture Extraction by Active Shape Models
 Hand Gesture Extraction by Active Shape Models Nianjun Liu, Brian C. Lovell School of Information Technology and Electrical Engineering The University of Queensland, Brisbane 4072, Australia National ICT
Hand Gesture Extraction by Active Shape Models Nianjun Liu, Brian C. Lovell School of Information Technology and Electrical Engineering The University of Queensland, Brisbane 4072, Australia National ICT
Face Recognition Using Long Haar-like Filters
 Face Recognition Using Long Haar-like Filters Y. Higashijima 1, S. Takano 1, and K. Niijima 1 1 Department of Informatics, Kyushu University, Japan. Email: {y-higasi, takano, niijima}@i.kyushu-u.ac.jp
Face Recognition Using Long Haar-like Filters Y. Higashijima 1, S. Takano 1, and K. Niijima 1 1 Department of Informatics, Kyushu University, Japan. Email: {y-higasi, takano, niijima}@i.kyushu-u.ac.jp
Linear Discriminant Analysis in Ottoman Alphabet Character Recognition
 Linear Discriminant Analysis in Ottoman Alphabet Character Recognition ZEYNEB KURT, H. IREM TURKMEN, M. ELIF KARSLIGIL Department of Computer Engineering, Yildiz Technical University, 34349 Besiktas /
Linear Discriminant Analysis in Ottoman Alphabet Character Recognition ZEYNEB KURT, H. IREM TURKMEN, M. ELIF KARSLIGIL Department of Computer Engineering, Yildiz Technical University, 34349 Besiktas /
Computational Foundations of Cognitive Science
 Computational Foundations of Cognitive Science Lecture 16: Models of Object Recognition Frank Keller School of Informatics University of Edinburgh keller@inf.ed.ac.uk February 23, 2010 Frank Keller Computational
Computational Foundations of Cognitive Science Lecture 16: Models of Object Recognition Frank Keller School of Informatics University of Edinburgh keller@inf.ed.ac.uk February 23, 2010 Frank Keller Computational
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Face View Synthesis Across Large Angles
 Face View Synthesis Across Large Angles Jiang Ni and Henry Schneiderman Robotics Institute, Carnegie Mellon University, Pittsburgh, PA 1513, USA Abstract. Pose variations, especially large out-of-plane
Face View Synthesis Across Large Angles Jiang Ni and Henry Schneiderman Robotics Institute, Carnegie Mellon University, Pittsburgh, PA 1513, USA Abstract. Pose variations, especially large out-of-plane
An Approach for Real Time Moving Object Extraction based on Edge Region Determination
 An Approach for Real Time Moving Object Extraction based on Edge Region Determination Sabrina Hoque Tuli Department of Computer Science and Engineering, Chittagong University of Engineering and Technology,
An Approach for Real Time Moving Object Extraction based on Edge Region Determination Sabrina Hoque Tuli Department of Computer Science and Engineering, Chittagong University of Engineering and Technology,
Active Shape Models - 'Smart Snakes'
 Active Shape Models - 'Smart Snakes' T.F.Cootes and C.J.Taylor Department of Medical Biophysics University of Manchester Oxford Road Manchester M13 9PT email: bim@wiau.mb.man.ac.uk Abstract We describe
Active Shape Models - 'Smart Snakes' T.F.Cootes and C.J.Taylor Department of Medical Biophysics University of Manchester Oxford Road Manchester M13 9PT email: bim@wiau.mb.man.ac.uk Abstract We describe
Generating Different Realistic Humanoid Motion
 Generating Different Realistic Humanoid Motion Zhenbo Li,2,3, Yu Deng,2,3, and Hua Li,2,3 Key Lab. of Computer System and Architecture, Institute of Computing Technology, Chinese Academy of Sciences, Beijing
Generating Different Realistic Humanoid Motion Zhenbo Li,2,3, Yu Deng,2,3, and Hua Li,2,3 Key Lab. of Computer System and Architecture, Institute of Computing Technology, Chinese Academy of Sciences, Beijing
Flexible 3D Models from Uncalibrated Cameras
 Flexible 3D Models from Uncalibrated Cameras T.F.Cootes, E.C. Di Mauro, C.J.Taylor, AXanitis Department of Medical Biophysics, University of Manchester Manchester M13 9PT email: bim@svl.smb.man.ac.uk Abstract
Flexible 3D Models from Uncalibrated Cameras T.F.Cootes, E.C. Di Mauro, C.J.Taylor, AXanitis Department of Medical Biophysics, University of Manchester Manchester M13 9PT email: bim@svl.smb.man.ac.uk Abstract
Improving Segmentation of the Left Ventricle using a Two-Component Statistical Model
 Improving Segmentation of the Left Ventricle using a Two-Component Statistical Model Sebastian Zambal, Jiří Hladůvka, and Katja Bühler VRVis Research Center for Virtual Reality and Visualization, Donau-City-Strasse
Improving Segmentation of the Left Ventricle using a Two-Component Statistical Model Sebastian Zambal, Jiří Hladůvka, and Katja Bühler VRVis Research Center for Virtual Reality and Visualization, Donau-City-Strasse
Algorithm research of 3D point cloud registration based on iterative closest point 1
 Acta Technica 62, No. 3B/2017, 189 196 c 2017 Institute of Thermomechanics CAS, v.v.i. Algorithm research of 3D point cloud registration based on iterative closest point 1 Qian Gao 2, Yujian Wang 2,3,
Acta Technica 62, No. 3B/2017, 189 196 c 2017 Institute of Thermomechanics CAS, v.v.i. Algorithm research of 3D point cloud registration based on iterative closest point 1 Qian Gao 2, Yujian Wang 2,3,
Real-time target tracking using a Pan and Tilt platform
 Real-time target tracking using a Pan and Tilt platform Moulay A. Akhloufi Abstract In recent years, we see an increase of interest for efficient tracking systems in surveillance applications. Many of
Real-time target tracking using a Pan and Tilt platform Moulay A. Akhloufi Abstract In recent years, we see an increase of interest for efficient tracking systems in surveillance applications. Many of
Active Appearance Models
 Active Appearance Models Edwards, Taylor, and Cootes Presented by Bryan Russell Overview Overview of Appearance Models Combined Appearance Models Active Appearance Model Search Results Constrained Active
Active Appearance Models Edwards, Taylor, and Cootes Presented by Bryan Russell Overview Overview of Appearance Models Combined Appearance Models Active Appearance Model Search Results Constrained Active
Vehicle Detection Method using Haar-like Feature on Real Time System
 Vehicle Detection Method using Haar-like Feature on Real Time System Sungji Han, Youngjoon Han and Hernsoo Hahn Abstract This paper presents a robust vehicle detection approach using Haar-like feature.
Vehicle Detection Method using Haar-like Feature on Real Time System Sungji Han, Youngjoon Han and Hernsoo Hahn Abstract This paper presents a robust vehicle detection approach using Haar-like feature.
The Novel Approach for 3D Face Recognition Using Simple Preprocessing Method
 The Novel Approach for 3D Face Recognition Using Simple Preprocessing Method Parvin Aminnejad 1, Ahmad Ayatollahi 2, Siamak Aminnejad 3, Reihaneh Asghari Abstract In this work, we presented a novel approach
The Novel Approach for 3D Face Recognition Using Simple Preprocessing Method Parvin Aminnejad 1, Ahmad Ayatollahi 2, Siamak Aminnejad 3, Reihaneh Asghari Abstract In this work, we presented a novel approach
An Active Illumination and Appearance (AIA) Model for Face Alignment
 Model for Face Alignment") An Active Illumination and Appearance (AIA) Model for Face Alignment Fatih Kahraman, Muhittin Gokmen Istanbul Technical University, Computer Science Dept., Turkey {fkahraman, gokmen}@itu.edu.tr Sune Darkner,
An Active Illumination and Appearance (AIA) Model for Face Alignment Fatih Kahraman, Muhittin Gokmen Istanbul Technical University, Computer Science Dept., Turkey {fkahraman, gokmen}@itu.edu.tr Sune Darkner,
Shape Descriptor using Polar Plot for Shape Recognition.
 Shape Descriptor using Polar Plot for Shape Recognition. Brijesh Pillai ECE Graduate Student, Clemson University bpillai@clemson.edu Abstract : This paper presents my work on computing shape models that
Shape Descriptor using Polar Plot for Shape Recognition. Brijesh Pillai ECE Graduate Student, Clemson University bpillai@clemson.edu Abstract : This paper presents my work on computing shape models that
Automatic Generation of Animatable 3D Personalized Model Based on Multi-view Images
 Automatic Generation of Animatable 3D Personalized Model Based on Multi-view Images Seong-Jae Lim, Ho-Won Kim, Jin Sung Choi CG Team, Contents Division ETRI Daejeon, South Korea sjlim@etri.re.kr Bon-Ki
Automatic Generation of Animatable 3D Personalized Model Based on Multi-view Images Seong-Jae Lim, Ho-Won Kim, Jin Sung Choi CG Team, Contents Division ETRI Daejeon, South Korea sjlim@etri.re.kr Bon-Ki
Skinning Mesh Animations
 Doug L. James, Christopher D. Twigg Carnegie Mellon University presented by Johannes Schmid 1 Outline Introduction & Motivation Overview & Details Results Discussion 2 Introduction Mesh sequence: 3 General
Doug L. James, Christopher D. Twigg Carnegie Mellon University presented by Johannes Schmid 1 Outline Introduction & Motivation Overview & Details Results Discussion 2 Introduction Mesh sequence: 3 General
Speeding up the Detection of Line Drawings Using a Hash Table
 Speeding up the Detection of Line Drawings Using a Hash Table Weihan Sun, Koichi Kise 2 Graduate School of Engineering, Osaka Prefecture University, Japan sunweihan@m.cs.osakafu-u.ac.jp, 2 kise@cs.osakafu-u.ac.jp
Speeding up the Detection of Line Drawings Using a Hash Table Weihan Sun, Koichi Kise 2 Graduate School of Engineering, Osaka Prefecture University, Japan sunweihan@m.cs.osakafu-u.ac.jp, 2 kise@cs.osakafu-u.ac.jp
Linear Discriminant Analysis for 3D Face Recognition System
 Linear Discriminant Analysis for 3D Face Recognition System 3.1 Introduction Face recognition and verification have been at the top of the research agenda of the computer vision community in recent times.
Linear Discriminant Analysis for 3D Face Recognition System 3.1 Introduction Face recognition and verification have been at the top of the research agenda of the computer vision community in recent times.
Segmentation-based Disparity Plane Fitting using PSO
 , pp.141-145 http://dx.doi.org/10.14257/astl.2014.47.33 Segmentation-based Disparity Plane Fitting using PSO Hyunjung, Kim 1, Ilyong, Weon 2, Youngcheol, Jang 3, Changhun, Lee 4 1,4 Department of Computer
, pp.141-145 http://dx.doi.org/10.14257/astl.2014.47.33 Segmentation-based Disparity Plane Fitting using PSO Hyunjung, Kim 1, Ilyong, Weon 2, Youngcheol, Jang 3, Changhun, Lee 4 1,4 Department of Computer
Occluded Facial Expression Tracking
 Occluded Facial Expression Tracking Hugo Mercier 1, Julien Peyras 2, and Patrice Dalle 1 1 Institut de Recherche en Informatique de Toulouse 118, route de Narbonne, F-31062 Toulouse Cedex 9 2 Dipartimento
Occluded Facial Expression Tracking Hugo Mercier 1, Julien Peyras 2, and Patrice Dalle 1 1 Institut de Recherche en Informatique de Toulouse 118, route de Narbonne, F-31062 Toulouse Cedex 9 2 Dipartimento
In Between 3D Active Appearance Models and 3D Morphable Models
 In Between 3D Active Appearance Models and 3D Morphable Models Jingu Heo and Marios Savvides Biometrics Lab, CyLab Carnegie Mellon University Pittsburgh, PA 15213 jheo@cmu.edu, msavvid@ri.cmu.edu Abstract
In Between 3D Active Appearance Models and 3D Morphable Models Jingu Heo and Marios Savvides Biometrics Lab, CyLab Carnegie Mellon University Pittsburgh, PA 15213 jheo@cmu.edu, msavvid@ri.cmu.edu Abstract
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Cross-pose Facial Expression Recognition
 Cross-pose Facial Expression Recognition Abstract In real world facial expression recognition (FER) applications, it is not practical for a user to enroll his/her facial expressions under different pose
Cross-pose Facial Expression Recognition Abstract In real world facial expression recognition (FER) applications, it is not practical for a user to enroll his/her facial expressions under different pose
Recognition: Face Recognition. Linda Shapiro EE/CSE 576
 Recognition: Face Recognition Linda Shapiro EE/CSE 576 1 Face recognition: once you ve detected and cropped a face, try to recognize it Detection Recognition Sally 2 Face recognition: overview Typical
Recognition: Face Recognition Linda Shapiro EE/CSE 576 1 Face recognition: once you ve detected and cropped a face, try to recognize it Detection Recognition Sally 2 Face recognition: overview Typical
22 October, 2012 MVA ENS Cachan. Lecture 5: Introduction to generative models Iasonas Kokkinos
 Machine Learning for Computer Vision 1 22 October, 2012 MVA ENS Cachan Lecture 5: Introduction to generative models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Machine Learning for Computer Vision 1 22 October, 2012 MVA ENS Cachan Lecture 5: Introduction to generative models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
CSE 481C Imitation Learning in Humanoid Robots Motion capture, inverse kinematics, and dimensionality reduction
 1 CSE 481C Imitation Learning in Humanoid Robots Motion capture, inverse kinematics, and dimensionality reduction Robotic Imitation of Human Actions 2 The inverse kinematics problem Joint angles Human-robot
1 CSE 481C Imitation Learning in Humanoid Robots Motion capture, inverse kinematics, and dimensionality reduction Robotic Imitation of Human Actions 2 The inverse kinematics problem Joint angles Human-robot
Static Gesture Recognition with Restricted Boltzmann Machines
 Static Gesture Recognition with Restricted Boltzmann Machines Peter O Donovan Department of Computer Science, University of Toronto 6 Kings College Rd, M5S 3G4, Canada odonovan@dgp.toronto.edu Abstract
Static Gesture Recognition with Restricted Boltzmann Machines Peter O Donovan Department of Computer Science, University of Toronto 6 Kings College Rd, M5S 3G4, Canada odonovan@dgp.toronto.edu Abstract
Cardboard People: A Parameterized Model of Articulated Image Motion
 Cardboard People: A Parameterized Model of Articulated Image Motion Shanon X. Ju Michael J. Black y Yaser Yacoob z Department of Computer Science, University of Toronto, Toronto, Ontario M5S A4 Canada
Cardboard People: A Parameterized Model of Articulated Image Motion Shanon X. Ju Michael J. Black y Yaser Yacoob z Department of Computer Science, University of Toronto, Toronto, Ontario M5S A4 Canada
Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model
 Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model TAE IN SEOL*, SUN-TAE CHUNG*, SUNHO KI**, SEONGWON CHO**, YUN-KWANG HONG*** *School of Electronic Engineering
Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model TAE IN SEOL*, SUN-TAE CHUNG*, SUNHO KI**, SEONGWON CHO**, YUN-KWANG HONG*** *School of Electronic Engineering
Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds
 9 1th International Conference on Document Analysis and Recognition Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds Weihan Sun, Koichi Kise Graduate School
9 1th International Conference on Document Analysis and Recognition Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds Weihan Sun, Koichi Kise Graduate School
Head Frontal-View Identification Using Extended LLE
 Head Frontal-View Identification Using Extended LLE Chao Wang Center for Spoken Language Understanding, Oregon Health and Science University Abstract Automatic head frontal-view identification is challenging
Head Frontal-View Identification Using Extended LLE Chao Wang Center for Spoken Language Understanding, Oregon Health and Science University Abstract Automatic head frontal-view identification is challenging
Automatic Construction of Active Appearance Models as an Image Coding Problem
 Automatic Construction of Active Appearance Models as an Image Coding Problem Simon Baker, Iain Matthews, and Jeff Schneider The Robotics Institute Carnegie Mellon University Pittsburgh, PA 1213 Abstract
Automatic Construction of Active Appearance Models as an Image Coding Problem Simon Baker, Iain Matthews, and Jeff Schneider The Robotics Institute Carnegie Mellon University Pittsburgh, PA 1213 Abstract
Unsupervised Human Members Tracking Based on an Silhouette Detection and Analysis Scheme
 Unsupervised Human Members Tracking Based on an Silhouette Detection and Analysis Scheme Costas Panagiotakis and Anastasios Doulamis Abstract In this paper, an unsupervised, automatic video human members(human
Unsupervised Human Members Tracking Based on an Silhouette Detection and Analysis Scheme Costas Panagiotakis and Anastasios Doulamis Abstract In this paper, an unsupervised, automatic video human members(human
Raghuraman Gopalan Center for Automation Research University of Maryland, College Park
 2D Shape Matching (and Object Recognition) Raghuraman Gopalan Center for Automation Research University of Maryland, College Park 1 Outline What is a shape? Part 1: Matching/ Recognition Shape contexts
2D Shape Matching (and Object Recognition) Raghuraman Gopalan Center for Automation Research University of Maryland, College Park 1 Outline What is a shape? Part 1: Matching/ Recognition Shape contexts
Lecture 14 Shape. ch. 9, sec. 1-8, of Machine Vision by Wesley E. Snyder & Hairong Qi. Spring (CMU RI) : BioE 2630 (Pitt)
 : BioE 2630 (Pitt)") Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Low Dimensional Surface Parameterisation with Applications in Biometrics
 Low Dimensional Surface Parameterisation with Applications in Biometrics Wei Quan, Bogdan J. Matuszewski, Lik-Kwan Shark, Djamel Ait-Boudaoud Applied Digital Signal and Image Processing Centre University
Low Dimensional Surface Parameterisation with Applications in Biometrics Wei Quan, Bogdan J. Matuszewski, Lik-Kwan Shark, Djamel Ait-Boudaoud Applied Digital Signal and Image Processing Centre University
Automatically Building Appearance Models from Image Sequences using Salient Features.
 Automatically Building Appearance Models from Image Sequences using Salient Features. K.N.Walker, T.F.Cootes and C.J.Taylor Dept. Medical Biophysics, Manchester University, UK Tel: +44 (0)161 275 5130
Automatically Building Appearance Models from Image Sequences using Salient Features. K.N.Walker, T.F.Cootes and C.J.Taylor Dept. Medical Biophysics, Manchester University, UK Tel: +44 (0)161 275 5130
Ear Recognition based on 2D Images
 Ear Recognition based on 2D Images Li Yuan, Zhi-chun Mu Abstract-Research of ear recognition and its application is a new subject in the field of biometrics authentication. Ear normalization and alignment
Ear Recognition based on 2D Images Li Yuan, Zhi-chun Mu Abstract-Research of ear recognition and its application is a new subject in the field of biometrics authentication. Ear normalization and alignment
Human motion analysis: methodologies and applications
 Human motion analysis: methodologies and applications Maria João M. Vasconcelos, João Manuel R. S. Tavares maria.vasconcelos@fe.up.pt CMBBE 2008 8th International Symposium on Computer Methods in Biomechanics
Human motion analysis: methodologies and applications Maria João M. Vasconcelos, João Manuel R. S. Tavares maria.vasconcelos@fe.up.pt CMBBE 2008 8th International Symposium on Computer Methods in Biomechanics
IMPROVED FACE RECOGNITION USING ICP TECHNIQUES INCAMERA SURVEILLANCE SYSTEMS. Kirthiga, M.E-Communication system, PREC, Thanjavur
 IMPROVED FACE RECOGNITION USING ICP TECHNIQUES INCAMERA SURVEILLANCE SYSTEMS Kirthiga, M.E-Communication system, PREC, Thanjavur R.Kannan,Assistant professor,prec Abstract: Face Recognition is important
IMPROVED FACE RECOGNITION USING ICP TECHNIQUES INCAMERA SURVEILLANCE SYSTEMS Kirthiga, M.E-Communication system, PREC, Thanjavur R.Kannan,Assistant professor,prec Abstract: Face Recognition is important
Optimal Sub-Shape Models by Minimum Description Length
 Optimal Sub-Shape Models by Minimum Description Length Paper Number : 060 Abstract Active shape models are a powerful and widely used tool to interpret complex image data. By building models of shape variation
Optimal Sub-Shape Models by Minimum Description Length Paper Number : 060 Abstract Active shape models are a powerful and widely used tool to interpret complex image data. By building models of shape variation
Locating Salient Object Features
 Locating Salient Object Features K.N.Walker, T.F.Cootes and C.J.Taylor Dept. Medical Biophysics, Manchester University, UK knw@sv1.smb.man.ac.uk Abstract We present a method for locating salient object
Locating Salient Object Features K.N.Walker, T.F.Cootes and C.J.Taylor Dept. Medical Biophysics, Manchester University, UK knw@sv1.smb.man.ac.uk Abstract We present a method for locating salient object
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
arxiv: v3 [cs.cv] 31 Aug 2014
![arxiv: v3 [cs.cv] 31 Aug 2014](/thumbs/77/76060131.jpg "arxiv: v3 [cs.cv] 31 Aug 2014") Kernel Principal Component Analysis and its Applications in Face Recognition and Active Shape Models Quan Wang Rensselaer Polytechnic Institute, Eighth Street, Troy, Y 28 USA wangq@rpi.edu arxiv:27.3538v3
Kernel Principal Component Analysis and its Applications in Face Recognition and Active Shape Models Quan Wang Rensselaer Polytechnic Institute, Eighth Street, Troy, Y 28 USA wangq@rpi.edu arxiv:27.3538v3
Non-linear Point Distribution Modelling using a Multi-layer Perceptron
 Non-linear Point Distribution Modelling using a Multi-layer Perceptron P.D. Sozou, T.F. Cootes, C.J. Taylor and E.C. Di Mauro Department of Medical Biophysics University of Manchester M13 9PT email: pds@svl.smb.man.ac.uk
Non-linear Point Distribution Modelling using a Multi-layer Perceptron P.D. Sozou, T.F. Cootes, C.J. Taylor and E.C. Di Mauro Department of Medical Biophysics University of Manchester M13 9PT email: pds@svl.smb.man.ac.uk
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
An Object Detection System using Image Reconstruction with PCA
 An Object Detection System using Image Reconstruction with PCA Luis Malagón-Borja and Olac Fuentes Instituto Nacional de Astrofísica Óptica y Electrónica, Puebla, 72840 Mexico jmb@ccc.inaoep.mx, fuentes@inaoep.mx
An Object Detection System using Image Reconstruction with PCA Luis Malagón-Borja and Olac Fuentes Instituto Nacional de Astrofísica Óptica y Electrónica, Puebla, 72840 Mexico jmb@ccc.inaoep.mx, fuentes@inaoep.mx
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Image Segmentation and Registration
 Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
EigenTracking: Robust Matching and Tracking of Articulated Objects Using a View-Based Representation
 EigenTracking: Robust Matching and Tracking of Articulated Objects Using a View-Based Representation Michael J. Black and Allan D. Jepson Xerox Palo Alto Research Center, 3333 Coyote Hill Road, Palo Alto,
EigenTracking: Robust Matching and Tracking of Articulated Objects Using a View-Based Representation Michael J. Black and Allan D. Jepson Xerox Palo Alto Research Center, 3333 Coyote Hill Road, Palo Alto,
Deep Learning Shape Priors for Object Segmentation
 2013 IEEE Conference on Computer Vision and Pattern Recognition Deep Learning Shape Priors for Object Segmentation Fei Chen a,c Huimin Yu a,b Roland Hu a Xunxun Zeng d a Department of Information Science
2013 IEEE Conference on Computer Vision and Pattern Recognition Deep Learning Shape Priors for Object Segmentation Fei Chen a,c Huimin Yu a,b Roland Hu a Xunxun Zeng d a Department of Information Science
3D Posture Representation Using Meshless Parameterization with Cylindrical Virtual Boundary
 3D Posture Representation Using Meshless Parameterization with Cylindrical Virtual Boundary Yunli Lee and Keechul Jung School of Media, College of Information Technology, Soongsil University, Seoul, South
3D Posture Representation Using Meshless Parameterization with Cylindrical Virtual Boundary Yunli Lee and Keechul Jung School of Media, College of Information Technology, Soongsil University, Seoul, South
L10 Layered Depth Normal Images. Introduction Related Work Structured Point Representation Boolean Operations Conclusion
 L10 Layered Depth Normal Images Introduction Related Work Structured Point Representation Boolean Operations Conclusion 1 Introduction Purpose: using the computational power on GPU to speed up solid modeling
L10 Layered Depth Normal Images Introduction Related Work Structured Point Representation Boolean Operations Conclusion 1 Introduction Purpose: using the computational power on GPU to speed up solid modeling
Motion Interpretation and Synthesis by ICA
 Motion Interpretation and Synthesis by ICA Renqiang Min Department of Computer Science, University of Toronto, 1 King s College Road, Toronto, ON M5S3G4, Canada Abstract. It is known that high-dimensional
Motion Interpretation and Synthesis by ICA Renqiang Min Department of Computer Science, University of Toronto, 1 King s College Road, Toronto, ON M5S3G4, Canada Abstract. It is known that high-dimensional
Hierarchical Shape Statistical Model for Segmentation of Lung Fields in Chest Radiographs
 Hierarchical Shape Statistical Model for Segmentation of Lung Fields in Chest Radiographs Yonghong Shi 1 and Dinggang Shen 2,*1 1 Digital Medical Research Center, Fudan University, Shanghai, 232, China
Hierarchical Shape Statistical Model for Segmentation of Lung Fields in Chest Radiographs Yonghong Shi 1 and Dinggang Shen 2,*1 1 Digital Medical Research Center, Fudan University, Shanghai, 232, China
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Applications Video Surveillance (On-line or off-line)
") Face Face Recognition: Dimensionality Reduction Biometrics CSE 190-a Lecture 12 CSE190a Fall 06 CSE190a Fall 06 Face Recognition Face is the most common biometric used by humans Applications range from
Face Face Recognition: Dimensionality Reduction Biometrics CSE 190-a Lecture 12 CSE190a Fall 06 CSE190a Fall 06 Face Recognition Face is the most common biometric used by humans Applications range from