Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I)
|
|
|
- Roberta Hall
- 6 years ago
- Views:
Transcription
1 Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I) Fred Park UCI icamp 2011
2 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching, Warping, Shape Prior Segmentation 5. Cell Movement in 3D Matrix Overview and Set-up
3 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching, Warping, Shape Prior Segmentation 5. Cell Movement in 3D Matrix Overview and Set-up

4 Shape The term Shape is commonly used to describe the overall appearance of an object
5 Shape Humans: Understanding and learning shapes requires cognitive perception and some good old trial and error Child with Shape Sorter

6 Example of unsuccessful shape sorting Note:

7 What is the notion of Shape?
8 Example: Airplanes

9 Example: Biology


10 Example: Biology Bacterial Shapes

11 Example: Biology



12 Example: Biology Dolphins: raked fin Sharks: more upright fin

13 Example: Biology Shark or Dolphin?

14 Shape Classes
15 Computer Vision: MPEG-7 Vehicle shape classes: (a) Sedan, (b) Pickup, (c) Minivan, (d) SUV. Airplane shape classes: (a) Mirage, (b) Eurofighter, (c) F-14 wings closed, (d) F-14 wings opened, (e) Harrier, (f) F-22, (g) F-15

16 Shape Definition Mathematician and Statistician David George Kendall defined shape as: Shape is all the geometric information that remains when location, scale, and rotational effects are filtered out from an object Silhouette of Hand Four exact copies of the same shape, but under different Euclidean transformations
17 Shape Definition cont d. Shape is geometrical information that remains when location, scale, and rotational effects are filtered out from an object.
18 Scale Issues Dryden&Mardia/Kendall: Sometimes we are also interested in retaining scale as well as shape Filtering out rotation and translation: Shape and Size Information remains
19 Also known as shape matching or Shape alignment Shape Registration
20 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching, Warping, Shape Prior Segmentation 5. Cell Movement in 3D Matrix Overview and Set-up
21 Shape Representation in 2D Implict: View Shape as zero level set of a 3D function (surface) Explicit: View Parametric Representation of Shape In General, in either case, should be able to view shape as a binary function (image)
22 Shape Descriptors How Does one Mathematically Quantify Shape? What are the Challenges? What are the Tools?
23 Geometric Information: Edges Corners Lines Curves Areas Distances Etc.. Shape Descriptors
24 Useful Descriptor Properties Invariance to translation Invariance to rotation Scalability


25 Simply connected, convex and nonconvex shapes Simply Connected Shapes Non Simply Connected Shape
26 Useful Descriptor Properties Cont d. Unique Identification of certain types of shapes. E.g. Convex Shapes/Polygons. In general non-convex/non-simply connected shapes are more challenging. Easy and natural incorporation into classification, matching, warping, or segmentation models
27 Non-uniqueness of Descriptor Example
28 Descriptor Examples Fourier: shape info in low freq. components Moments: mean, variance, skew, kurtosis Centered/Centroid Distance Cliques: Intervertex Distances Inner Distance Landmarks and Statistical Signatures Many others, still very active research topic
29 Descriptor Examples Fourier Moments Centered/Centroid Distance Inner Distance Cliques Landmarks and Statistical Signatures Many others, still very active research topic
30 Given a 1D discrete function f(x) Statistical Moments First moment: mean Second moment: variance how spread out is function Third moment: skew how symmetric is function n-th moment about mean: n-th central moment
31 Statistical Moments Fourth central moment : Kurtosis how peaky is the function Kurtosis =
32 Statistical Moments in 2D

33 2D Second Order Moments By Finding the Eigenvalues and Eigenvectors of C, we can determine how elongated a shape is (eccentricity) by looking at the ratio of the eigenvalues. Direction of this eccentricity is given by the eigenvector with largest absolute value eigenvalue
34 Centroid Distance Signature Centroid-based time series representation All extracted time series are further standardised and resampled to the same length Distance to boundary along ray 34 Angle
35 Cliques Invariant Signature r 3 r 2 r 1 Motivatation: Bending Invariant Signatures Elad and Kimmel r n Intervertex Distances r n-1 i, j ( pi p j ri rj r i : pts. lying on reference shape p i : pts. lying on evolving contour 2 2 ) 2 Incorporation into: Geodesic Active Contours (Snakes) Polygonal Implementation of the P.W. Constant Mumford Shah Segmentation Model
36 Landmarks (Dryden & Mardia) Landmark is a pt. of correspondence on each object that matches between and within populations An Anatomical Landmark is a pt. assigned by an expert that corresponds between objects of study in a way of meaningful in the context of the disciplinary context Mathematical Landmarks are points located on an object according to some mathematical or geometrical property of the figure

37 Landmarks Much Shape Information is Embedded in Landmarks Basis for Statistical Shape Descriptors
38 Landmarks Three landmark points along a line for simple shape comparison Cf. G. Small, The Statistical Theory of Shape
39 Inner Distance Inner Distance Definition: x and y are landmark points Dashed line shows shortest path between x and y

40 Inner Distance
41 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching, Warping, Shape Prior Segmentation 5. Cell Movement in 3D Matrix Overview and Set-up

42 Shape Classification Definition Shape Classification: What are the shapes of a given type up to equivalence
43 Shape Classification: 2 Parts Shape Classification (1) Shape Descriptors (2) Classification from Descriptors (Learning Algorithms)

44 Problem formulation Object recognition systems dependent heavily on the accurate identification of shapes Learning the shapes without supervision is essential when large image collections are available 44

45 What is Unsupervised Learning? In supervised learning we were given attributes & targets (e.g. class labels). In unsupervised learning we are only given attributes. Our task is to discover structure in the data. Example I: the data may be structured in clusters: Example II: the data may live on a lower dimensional manifold:

46 Why Discover Structure? Data compression: If you have a good model you can encode the data more cheaply. Example PCA: To encode the data I have to encode the x and y position of each data-case. However, I could also encode the offset and angle of the line plus the deviations from the line. Small numbers can be encoded more cheaply than large numbers with the same precision. This idea is the basis for model selection: The complexity of your model (e.g. the number of parameters) should be such that you can encode the data-set with the fewest number of bits (up to a certain precision). Clustering: represent every data-case by a cluster representative plus deviations. ML is often trying to find semantically meaningful representations (abstractions). These are good as a basis for making new predictions.
47 Bullseye Test for shape clustering There is a frequently used test in shape retrieval and enables us to compare our algorithm against many of the best performing ones. A single shape is presented as a query and the top forty matches are retrieved. The task is to repeated for each shape and the number of correct matches (out of a maximum possible 20)are noted, a perfect performance results in 1400*20 matches 47 47
48 Manifold clustering of shapes Vision data often reside on a nonlinear embedding that linear projections fail to reconstruct We apply Isomap to detect the intrinsic dimensionality of the shapes data. Isomap moves further apart different clusters, preserving their convexity 48
49 Manifold Learning Assume data lives on low level manifold Two very different objects may have smaller Euclidean distance than geodesic distance pear Closest in Geodesic Distance apple Smaller Euclidean Distance mushroom orange
50 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching, Shape Warping, Shape Prior Segmentation 5. Cell Movement in 3D Matrix Overview and Set-up
51 Shape Warping Definition: Deformation of one given shape to another Often done through some sort of gradient flow of an associated energy Move a curve according to some normal velocity that minimizes a shape comparison energy (standard practice)
52 Shape Warping Example Min over functions Á Ã: reference shape Á: evolving contour/surface Implicit Shape Descriptors

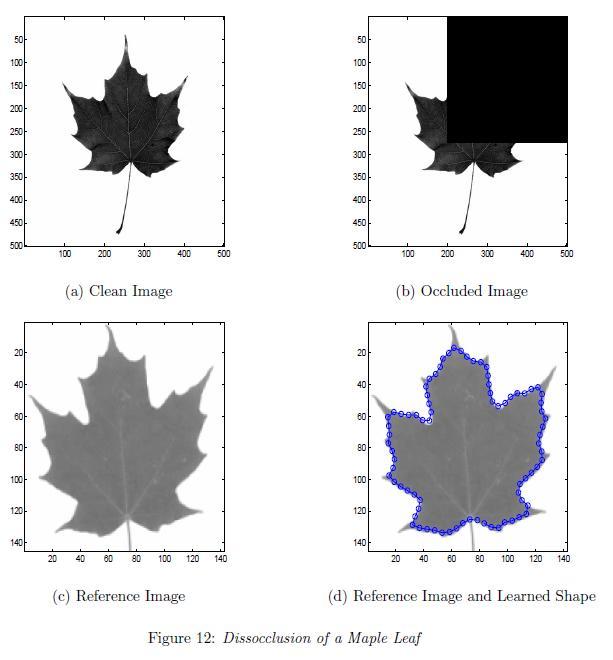
53 Implicit shape warping: disocclusion

54 Implicit shape warping: disocclusion
55 Shape Prior Segmentation and Again cliques Disocclusion r 3 r 2 r 1 r n Intervertex Distances 2 2 r n-1 i, j ( pi p j ri rj r i : pts. lying on reference shape p i : pts. lying on evolving contour 2 )
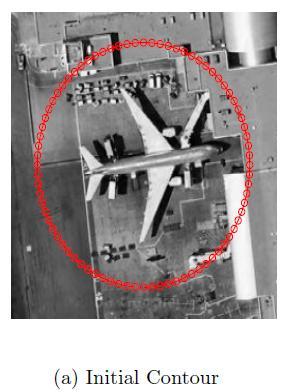
56 Shape Prior Segmentation

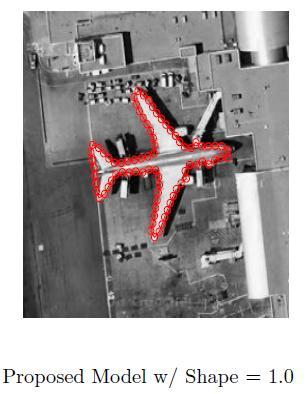
57 Shape Prior Segmentation
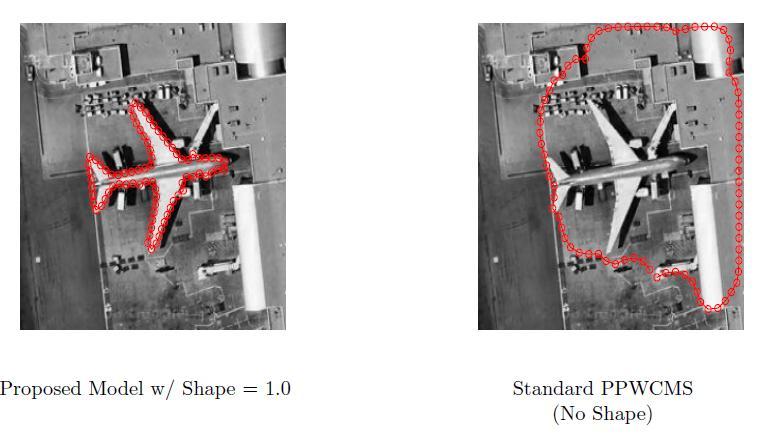
58 Shape Prior Segmentation
59

60
61 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching, Warping, Shape Prior Segmentation 5. Cell Movement in 3D Matrix Overview and Set-up
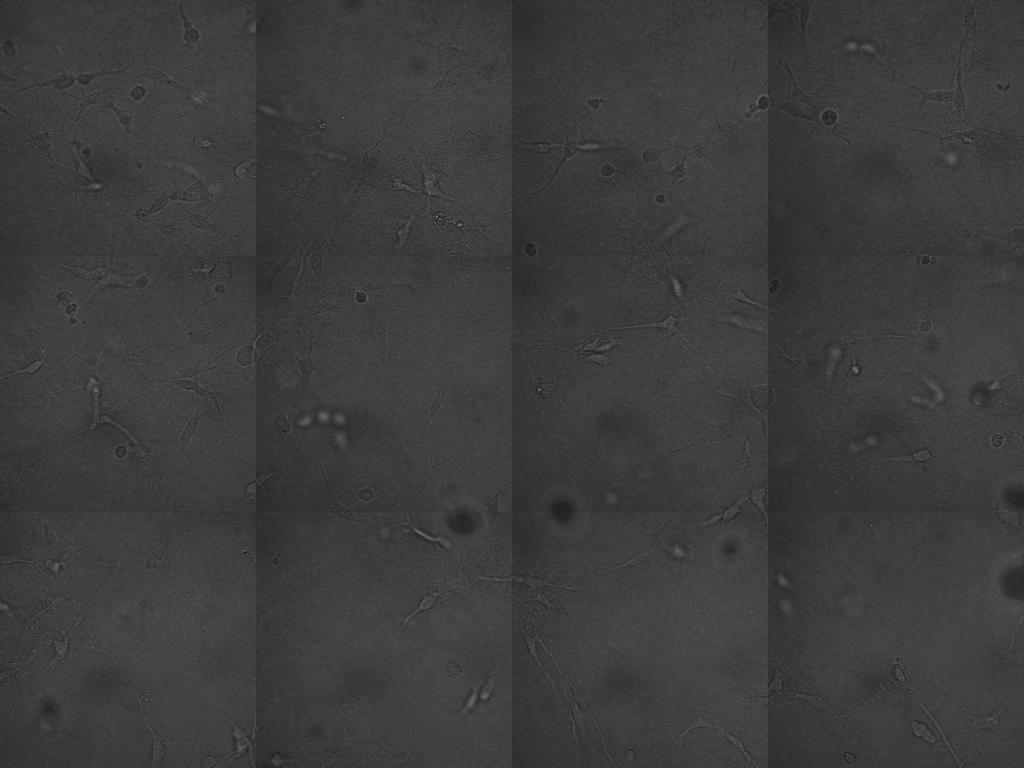
62 Cells
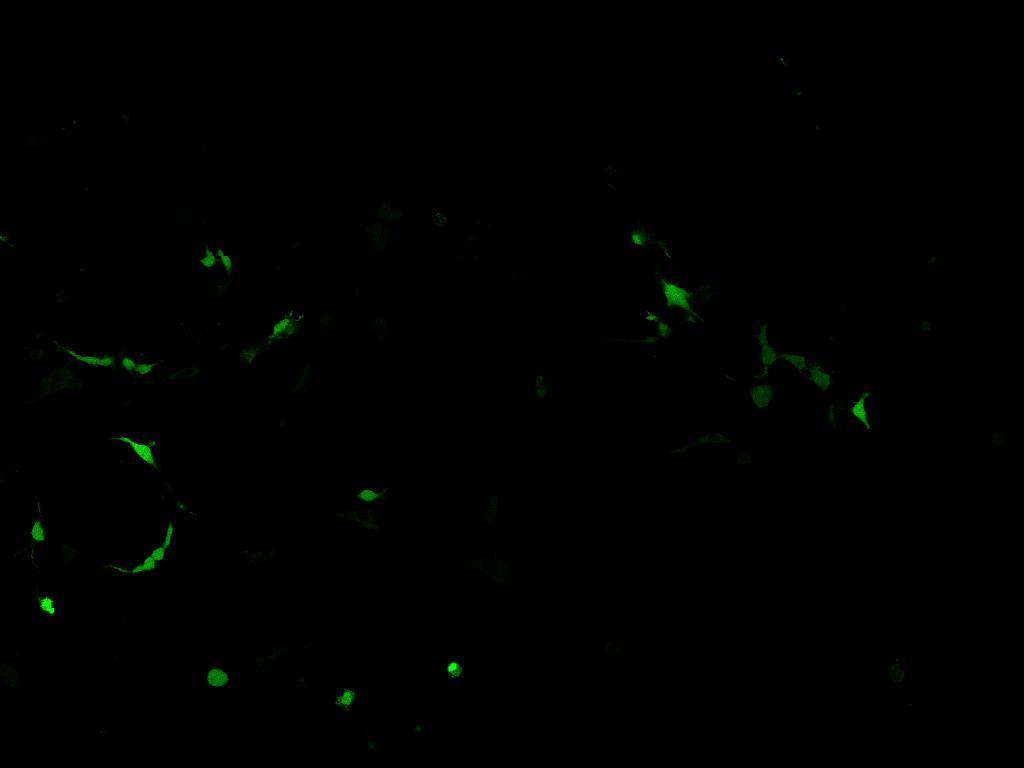
63 cells
64 Bio Apps Viable Project: Segmenting 2-D Cell slice data with possibly shape priors Long term calculate velocity field both inside cell and boundary as well as outside (ECM) in 3-D Long Term also 3D segmentation of volumetric cells
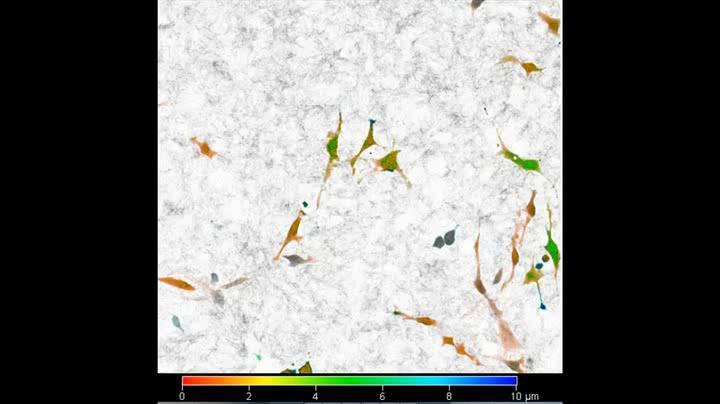
65 Cell Protrusion
Clustering & Dimensionality Reduction. 273A Intro Machine Learning
 Clustering & Dimensionality Reduction 273A Intro Machine Learning What is Unsupervised Learning? In supervised learning we were given attributes & targets (e.g. class labels). In unsupervised learning
Clustering & Dimensionality Reduction 273A Intro Machine Learning What is Unsupervised Learning? In supervised learning we were given attributes & targets (e.g. class labels). In unsupervised learning
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Dimension Reduction CS534
 Dimension Reduction CS534 Why dimension reduction? High dimensionality large number of features E.g., documents represented by thousands of words, millions of bigrams Images represented by thousands of
Dimension Reduction CS534 Why dimension reduction? High dimensionality large number of features E.g., documents represented by thousands of words, millions of bigrams Images represented by thousands of
Preparation Meeting. Recent Advances in the Analysis of 3D Shapes. Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers
 Preparation Meeting Recent Advances in the Analysis of 3D Shapes Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers What You Will Learn in the Seminar Get an overview on state of the art
Preparation Meeting Recent Advances in the Analysis of 3D Shapes Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers What You Will Learn in the Seminar Get an overview on state of the art
Non-linear dimension reduction
 Sta306b May 23, 2011 Dimension Reduction: 1 Non-linear dimension reduction ISOMAP: Tenenbaum, de Silva & Langford (2000) Local linear embedding: Roweis & Saul (2000) Local MDS: Chen (2006) all three methods
Sta306b May 23, 2011 Dimension Reduction: 1 Non-linear dimension reduction ISOMAP: Tenenbaum, de Silva & Langford (2000) Local linear embedding: Roweis & Saul (2000) Local MDS: Chen (2006) all three methods
Lecture 14 Shape. ch. 9, sec. 1-8, of Machine Vision by Wesley E. Snyder & Hairong Qi. Spring (CMU RI) : BioE 2630 (Pitt)
 : BioE 2630 (Pitt)") Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Improving Shape retrieval by Spectral Matching and Meta Similarity
 1 / 21 Improving Shape retrieval by Spectral Matching and Meta Similarity Amir Egozi (BGU), Yosi Keller (BIU) and Hugo Guterman (BGU) Department of Electrical and Computer Engineering, Ben-Gurion University
1 / 21 Improving Shape retrieval by Spectral Matching and Meta Similarity Amir Egozi (BGU), Yosi Keller (BIU) and Hugo Guterman (BGU) Department of Electrical and Computer Engineering, Ben-Gurion University
STATISTICS AND ANALYSIS OF SHAPE
 Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
Raghuraman Gopalan Center for Automation Research University of Maryland, College Park
 2D Shape Matching (and Object Recognition) Raghuraman Gopalan Center for Automation Research University of Maryland, College Park 1 Outline What is a shape? Part 1: Matching/ Recognition Shape contexts
2D Shape Matching (and Object Recognition) Raghuraman Gopalan Center for Automation Research University of Maryland, College Park 1 Outline What is a shape? Part 1: Matching/ Recognition Shape contexts
Shape description and modelling
 COMP3204/COMP6223: Computer Vision Shape description and modelling Jonathon Hare jsh2@ecs.soton.ac.uk Extracting features from shapes represented by connected components Recap: Connected Component A connected
COMP3204/COMP6223: Computer Vision Shape description and modelling Jonathon Hare jsh2@ecs.soton.ac.uk Extracting features from shapes represented by connected components Recap: Connected Component A connected
Guidelines for proper use of Plate elements
 Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Clustering and Visualisation of Data
 Clustering and Visualisation of Data Hiroshi Shimodaira January-March 28 Cluster analysis aims to partition a data set into meaningful or useful groups, based on distances between data points. In some
Clustering and Visualisation of Data Hiroshi Shimodaira January-March 28 Cluster analysis aims to partition a data set into meaningful or useful groups, based on distances between data points. In some
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
A Computer Vision System for Graphical Pattern Recognition and Semantic Object Detection
 A Computer Vision System for Graphical Pattern Recognition and Semantic Object Detection Tudor Barbu Institute of Computer Science, Iaşi, Romania Abstract We have focused on a set of problems related to
A Computer Vision System for Graphical Pattern Recognition and Semantic Object Detection Tudor Barbu Institute of Computer Science, Iaşi, Romania Abstract We have focused on a set of problems related to
Network Traffic Measurements and Analysis
 DEIB - Politecnico di Milano Fall, 2017 Introduction Often, we have only a set of features x = x 1, x 2,, x n, but no associated response y. Therefore we are not interested in prediction nor classification,
DEIB - Politecnico di Milano Fall, 2017 Introduction Often, we have only a set of features x = x 1, x 2,, x n, but no associated response y. Therefore we are not interested in prediction nor classification,
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
CIE L*a*b* color model
 CIE L*a*b* color model To further strengthen the correlation between the color model and human perception, we apply the following non-linear transformation: with where (X n,y n,z n ) are the tristimulus
CIE L*a*b* color model To further strengthen the correlation between the color model and human perception, we apply the following non-linear transformation: with where (X n,y n,z n ) are the tristimulus
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Object Recognition. Lecture 11, April 21 st, Lexing Xie. EE4830 Digital Image Processing
 Object Recognition Lecture 11, April 21 st, 2008 Lexing Xie EE4830 Digital Image Processing http://www.ee.columbia.edu/~xlx/ee4830/ 1 Announcements 2 HW#5 due today HW#6 last HW of the semester Due May
Object Recognition Lecture 11, April 21 st, 2008 Lexing Xie EE4830 Digital Image Processing http://www.ee.columbia.edu/~xlx/ee4830/ 1 Announcements 2 HW#5 due today HW#6 last HW of the semester Due May
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
3D Shape Representation and Analysis of the Human Body and Ontology for Anthropometric Landmarks
 3D Shape Representation and Analysis of the Human Body and Ontology for Anthropometric Landmarks Afzal Godil National Institute of Standards and Technology, USA WEAR conference, Banff, Canada 2007 Introduction
3D Shape Representation and Analysis of the Human Body and Ontology for Anthropometric Landmarks Afzal Godil National Institute of Standards and Technology, USA WEAR conference, Banff, Canada 2007 Introduction
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Data Mining: Data. Lecture Notes for Chapter 2. Introduction to Data Mining
 Data Mining: Data Lecture Notes for Chapter 2 Introduction to Data Mining by Tan, Steinbach, Kumar Data Preprocessing Aggregation Sampling Dimensionality Reduction Feature subset selection Feature creation
Data Mining: Data Lecture Notes for Chapter 2 Introduction to Data Mining by Tan, Steinbach, Kumar Data Preprocessing Aggregation Sampling Dimensionality Reduction Feature subset selection Feature creation
MAURICIO CERDA LAB BIO-RELATED : IMAGE PROCESSING METHODS FOR MICROSCOPY IMAGING
 MAURICIO CERDA LAB BIO-RELATED : IMAGE PROCESSING METHODS FOR MICROSCOPY IMAGING - La Serena, 8/24/2017 - OUTLINE Image processing? Segmentation (clustering) Shape description (PCA) Lab: challenge! IMAGE
MAURICIO CERDA LAB BIO-RELATED : IMAGE PROCESSING METHODS FOR MICROSCOPY IMAGING - La Serena, 8/24/2017 - OUTLINE Image processing? Segmentation (clustering) Shape description (PCA) Lab: challenge! IMAGE
Data Mining Chapter 3: Visualizing and Exploring Data Fall 2011 Ming Li Department of Computer Science and Technology Nanjing University
 Data Mining Chapter 3: Visualizing and Exploring Data Fall 2011 Ming Li Department of Computer Science and Technology Nanjing University Exploratory data analysis tasks Examine the data, in search of structures
Data Mining Chapter 3: Visualizing and Exploring Data Fall 2011 Ming Li Department of Computer Science and Technology Nanjing University Exploratory data analysis tasks Examine the data, in search of structures
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Digital Image Processing Chapter 11: Image Description and Representation
 Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Lecture overview. Visualisatie BMT. Vector algorithms. Vector algorithms. Time animation. Time animation
 Visualisatie BMT Lecture overview Vector algorithms Tensor algorithms Modeling algorithms Algorithms - 2 Arjan Kok a.j.f.kok@tue.nl 1 2 Vector algorithms Vector 2 or 3 dimensional representation of direction
Visualisatie BMT Lecture overview Vector algorithms Tensor algorithms Modeling algorithms Algorithms - 2 Arjan Kok a.j.f.kok@tue.nl 1 2 Vector algorithms Vector 2 or 3 dimensional representation of direction
Challenges motivating deep learning. Sargur N. Srihari
 Challenges motivating deep learning Sargur N. srihari@cedar.buffalo.edu 1 Topics In Machine Learning Basics 1. Learning Algorithms 2. Capacity, Overfitting and Underfitting 3. Hyperparameters and Validation
Challenges motivating deep learning Sargur N. srihari@cedar.buffalo.edu 1 Topics In Machine Learning Basics 1. Learning Algorithms 2. Capacity, Overfitting and Underfitting 3. Hyperparameters and Validation
Selecting Models from Videos for Appearance-Based Face Recognition
 Selecting Models from Videos for Appearance-Based Face Recognition Abdenour Hadid and Matti Pietikäinen Machine Vision Group Infotech Oulu and Department of Electrical and Information Engineering P.O.
Selecting Models from Videos for Appearance-Based Face Recognition Abdenour Hadid and Matti Pietikäinen Machine Vision Group Infotech Oulu and Department of Electrical and Information Engineering P.O.
Statistical Shape Analysis
 Statistical Shape Analysis I. L. Dryden and K. V. Mardia University ofleeds, UK JOHN WILEY& SONS Chichester New York Weinheim Brisbane Singapore Toronto Contents Preface Acknowledgements xv xix 1 Introduction
Statistical Shape Analysis I. L. Dryden and K. V. Mardia University ofleeds, UK JOHN WILEY& SONS Chichester New York Weinheim Brisbane Singapore Toronto Contents Preface Acknowledgements xv xix 1 Introduction
MULTIVARIATE TEXTURE DISCRIMINATION USING A PRINCIPAL GEODESIC CLASSIFIER
 MULTIVARIATE TEXTURE DISCRIMINATION USING A PRINCIPAL GEODESIC CLASSIFIER A.Shabbir 1, 2 and G.Verdoolaege 1, 3 1 Department of Applied Physics, Ghent University, B-9000 Ghent, Belgium 2 Max Planck Institute
MULTIVARIATE TEXTURE DISCRIMINATION USING A PRINCIPAL GEODESIC CLASSIFIER A.Shabbir 1, 2 and G.Verdoolaege 1, 3 1 Department of Applied Physics, Ghent University, B-9000 Ghent, Belgium 2 Max Planck Institute
Robust Pose Estimation using the SwissRanger SR-3000 Camera
 Robust Pose Estimation using the SwissRanger SR- Camera Sigurjón Árni Guðmundsson, Rasmus Larsen and Bjarne K. Ersbøll Technical University of Denmark, Informatics and Mathematical Modelling. Building,
Robust Pose Estimation using the SwissRanger SR- Camera Sigurjón Árni Guðmundsson, Rasmus Larsen and Bjarne K. Ersbøll Technical University of Denmark, Informatics and Mathematical Modelling. Building,
Head Frontal-View Identification Using Extended LLE
 Head Frontal-View Identification Using Extended LLE Chao Wang Center for Spoken Language Understanding, Oregon Health and Science University Abstract Automatic head frontal-view identification is challenging
Head Frontal-View Identification Using Extended LLE Chao Wang Center for Spoken Language Understanding, Oregon Health and Science University Abstract Automatic head frontal-view identification is challenging
An Introduction to Pattern Recognition
 An Introduction to Pattern Recognition Speaker : Wei lun Chao Advisor : Prof. Jian-jiun Ding DISP Lab Graduate Institute of Communication Engineering 1 Abstract Not a new research field Wide range included
An Introduction to Pattern Recognition Speaker : Wei lun Chao Advisor : Prof. Jian-jiun Ding DISP Lab Graduate Institute of Communication Engineering 1 Abstract Not a new research field Wide range included
Nonlinear projections. Motivation. High-dimensional. data are. Perceptron) ) or RBFN. Multi-Layer. Example: : MLP (Multi(
 ) or RBFN. Multi-Layer. Example: : MLP (Multi(") Nonlinear projections Université catholique de Louvain (Belgium) Machine Learning Group http://www.dice.ucl ucl.ac.be/.ac.be/mlg/ 1 Motivation High-dimensional data are difficult to represent difficult
Nonlinear projections Université catholique de Louvain (Belgium) Machine Learning Group http://www.dice.ucl ucl.ac.be/.ac.be/mlg/ 1 Motivation High-dimensional data are difficult to represent difficult
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Fundamentals of Digital Image Processing
 \L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
\L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Machine vision. Summary # 6: Shape descriptors
 Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Geometric Representations. Stelian Coros
 Geometric Representations Stelian Coros Geometric Representations Languages for describing shape Boundary representations Polygonal meshes Subdivision surfaces Implicit surfaces Volumetric models Parametric
Geometric Representations Stelian Coros Geometric Representations Languages for describing shape Boundary representations Polygonal meshes Subdivision surfaces Implicit surfaces Volumetric models Parametric
THREE-DIMENSIONA L ELECTRON MICROSCOP Y OF MACROMOLECULAR ASSEMBLIE S. Visualization of Biological Molecules in Their Native Stat e.
 THREE-DIMENSIONA L ELECTRON MICROSCOP Y OF MACROMOLECULAR ASSEMBLIE S Visualization of Biological Molecules in Their Native Stat e Joachim Frank CHAPTER 1 Introduction 1 1 The Electron Microscope and
THREE-DIMENSIONA L ELECTRON MICROSCOP Y OF MACROMOLECULAR ASSEMBLIE S Visualization of Biological Molecules in Their Native Stat e Joachim Frank CHAPTER 1 Introduction 1 1 The Electron Microscope and
Modelling and Visualization of High Dimensional Data. Sample Examination Paper
 Duration not specified UNIVERSITY OF MANCHESTER SCHOOL OF COMPUTER SCIENCE Modelling and Visualization of High Dimensional Data Sample Examination Paper Examination date not specified Time: Examination
Duration not specified UNIVERSITY OF MANCHESTER SCHOOL OF COMPUTER SCIENCE Modelling and Visualization of High Dimensional Data Sample Examination Paper Examination date not specified Time: Examination
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Statistical Models for Shape and Appearance Note some material for these slides came from Algorithms
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Statistical Models for Shape and Appearance Note some material for these slides came from Algorithms
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
HAND-GESTURE BASED FILM RESTORATION
 HAND-GESTURE BASED FILM RESTORATION Attila Licsár University of Veszprém, Department of Image Processing and Neurocomputing,H-8200 Veszprém, Egyetem u. 0, Hungary Email: licsara@freemail.hu Tamás Szirányi
HAND-GESTURE BASED FILM RESTORATION Attila Licsár University of Veszprém, Department of Image Processing and Neurocomputing,H-8200 Veszprém, Egyetem u. 0, Hungary Email: licsara@freemail.hu Tamás Szirányi
GLOBAL SAMPLING OF IMAGE EDGES. Demetrios P. Gerogiannis, Christophoros Nikou, Aristidis Likas
 GLOBAL SAMPLING OF IMAGE EDGES Demetrios P. Gerogiannis, Christophoros Nikou, Aristidis Likas Department of Computer Science and Engineering, University of Ioannina, 45110 Ioannina, Greece {dgerogia,cnikou,arly}@cs.uoi.gr
GLOBAL SAMPLING OF IMAGE EDGES Demetrios P. Gerogiannis, Christophoros Nikou, Aristidis Likas Department of Computer Science and Engineering, University of Ioannina, 45110 Ioannina, Greece {dgerogia,cnikou,arly}@cs.uoi.gr
Case-Based Reasoning. CS 188: Artificial Intelligence Fall Nearest-Neighbor Classification. Parametric / Non-parametric.
 CS 188: Artificial Intelligence Fall 2008 Lecture 25: Kernels and Clustering 12/2/2008 Dan Klein UC Berkeley Case-Based Reasoning Similarity for classification Case-based reasoning Predict an instance
CS 188: Artificial Intelligence Fall 2008 Lecture 25: Kernels and Clustering 12/2/2008 Dan Klein UC Berkeley Case-Based Reasoning Similarity for classification Case-based reasoning Predict an instance
CS 188: Artificial Intelligence Fall 2008
 CS 188: Artificial Intelligence Fall 2008 Lecture 25: Kernels and Clustering 12/2/2008 Dan Klein UC Berkeley 1 1 Case-Based Reasoning Similarity for classification Case-based reasoning Predict an instance
CS 188: Artificial Intelligence Fall 2008 Lecture 25: Kernels and Clustering 12/2/2008 Dan Klein UC Berkeley 1 1 Case-Based Reasoning Similarity for classification Case-based reasoning Predict an instance
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
CSE 6242 A / CX 4242 DVA. March 6, Dimension Reduction. Guest Lecturer: Jaegul Choo
 CSE 6242 A / CX 4242 DVA March 6, 2014 Dimension Reduction Guest Lecturer: Jaegul Choo Data is Too Big To Analyze! Limited memory size! Data may not be fitted to the memory of your machine! Slow computation!
CSE 6242 A / CX 4242 DVA March 6, 2014 Dimension Reduction Guest Lecturer: Jaegul Choo Data is Too Big To Analyze! Limited memory size! Data may not be fitted to the memory of your machine! Slow computation!
10/14/2017. Dejan Sarka. Anomaly Detection. Sponsors
 Dejan Sarka Anomaly Detection Sponsors About me SQL Server MVP (17 years) and MCT (20 years) 25 years working with SQL Server Authoring 16 th book Authoring many courses, articles Agenda Introduction Simple
Dejan Sarka Anomaly Detection Sponsors About me SQL Server MVP (17 years) and MCT (20 years) 25 years working with SQL Server Authoring 16 th book Authoring many courses, articles Agenda Introduction Simple
22 October, 2012 MVA ENS Cachan. Lecture 5: Introduction to generative models Iasonas Kokkinos
 Machine Learning for Computer Vision 1 22 October, 2012 MVA ENS Cachan Lecture 5: Introduction to generative models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Machine Learning for Computer Vision 1 22 October, 2012 MVA ENS Cachan Lecture 5: Introduction to generative models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
CSE 6242 / CX October 9, Dimension Reduction. Guest Lecturer: Jaegul Choo
 CSE 6242 / CX 4242 October 9, 2014 Dimension Reduction Guest Lecturer: Jaegul Choo Volume Variety Big Data Era 2 Velocity Veracity 3 Big Data are High-Dimensional Examples of High-Dimensional Data Image
CSE 6242 / CX 4242 October 9, 2014 Dimension Reduction Guest Lecturer: Jaegul Choo Volume Variety Big Data Era 2 Velocity Veracity 3 Big Data are High-Dimensional Examples of High-Dimensional Data Image
9 length of contour = no. of horizontal and vertical components + ( 2 no. of diagonal components) diameter of boundary B
 diameter of boundary B") 8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS.
 SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Human pose estimation using Active Shape Models
 Human pose estimation using Active Shape Models Changhyuk Jang and Keechul Jung Abstract Human pose estimation can be executed using Active Shape Models. The existing techniques for applying to human-body
Human pose estimation using Active Shape Models Changhyuk Jang and Keechul Jung Abstract Human pose estimation can be executed using Active Shape Models. The existing techniques for applying to human-body
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Figure 1: Workflow of object-based classification
 Technical Specifications Object Analyst Object Analyst is an add-on package for Geomatica that provides tools for segmentation, classification, and feature extraction. Object Analyst includes an all-in-one
Technical Specifications Object Analyst Object Analyst is an add-on package for Geomatica that provides tools for segmentation, classification, and feature extraction. Object Analyst includes an all-in-one
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Cell Clustering Using Shape and Cell Context. Descriptor
 Cell Clustering Using Shape and Cell Context Descriptor Allison Mok: 55596627 F. Park E. Esser UC Irvine August 11, 2011 Abstract Given a set of boundary points from a 2-D image, the shape context captures
Cell Clustering Using Shape and Cell Context Descriptor Allison Mok: 55596627 F. Park E. Esser UC Irvine August 11, 2011 Abstract Given a set of boundary points from a 2-D image, the shape context captures
DI TRANSFORM. The regressive analyses. identify relationships
 July 2, 2015 DI TRANSFORM MVstats TM Algorithm Overview Summary The DI Transform Multivariate Statistics (MVstats TM ) package includes five algorithm options that operate on most types of geologic, geophysical,
July 2, 2015 DI TRANSFORM MVstats TM Algorithm Overview Summary The DI Transform Multivariate Statistics (MVstats TM ) package includes five algorithm options that operate on most types of geologic, geophysical,
CPSC 340: Machine Learning and Data Mining. Multi-Dimensional Scaling Fall 2017
 CPSC 340: Machine Learning and Data Mining Multi-Dimensional Scaling Fall 2017 Assignment 4: Admin 1 late day for tonight, 2 late days for Wednesday. Assignment 5: Due Monday of next week. Final: Details
CPSC 340: Machine Learning and Data Mining Multi-Dimensional Scaling Fall 2017 Assignment 4: Admin 1 late day for tonight, 2 late days for Wednesday. Assignment 5: Due Monday of next week. Final: Details
Free-Form Deformation and Other Deformation Techniques
 Free-Form Deformation and Other Deformation Techniques Deformation Deformation Basic Definition Deformation: A transformation/mapping of the positions of every particle in the original object to those
Free-Form Deformation and Other Deformation Techniques Deformation Deformation Basic Definition Deformation: A transformation/mapping of the positions of every particle in the original object to those
Shape Classification Using Regional Descriptors and Tangent Function
 Shape Classification Using Regional Descriptors and Tangent Function Meetal Kalantri meetalkalantri4@gmail.com Rahul Dhuture Amit Fulsunge Abstract In this paper three novel hybrid regional descriptor
Shape Classification Using Regional Descriptors and Tangent Function Meetal Kalantri meetalkalantri4@gmail.com Rahul Dhuture Amit Fulsunge Abstract In this paper three novel hybrid regional descriptor
Computational QC Geometry: A tool for Medical Morphometry, Computer Graphics & Vision
 Computational QC Geometry: A tool for Medical Morphometry, Computer Graphics & Vision Part II of the sequel of 2 talks. Computation C/QC geometry was presented by Tony F. Chan Ronald Lok Ming Lui Department
Computational QC Geometry: A tool for Medical Morphometry, Computer Graphics & Vision Part II of the sequel of 2 talks. Computation C/QC geometry was presented by Tony F. Chan Ronald Lok Ming Lui Department
Large-Scale 3D Point Cloud Processing Tutorial 2013
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Features The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in Prof.
Large-Scale 3D Point Cloud Processing Tutorial 2013 Features The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in Prof.
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Feature Extractors. CS 188: Artificial Intelligence Fall Nearest-Neighbor Classification. The Perceptron Update Rule.
 CS 188: Artificial Intelligence Fall 2007 Lecture 26: Kernels 11/29/2007 Dan Klein UC Berkeley Feature Extractors A feature extractor maps inputs to feature vectors Dear Sir. First, I must solicit your
CS 188: Artificial Intelligence Fall 2007 Lecture 26: Kernels 11/29/2007 Dan Klein UC Berkeley Feature Extractors A feature extractor maps inputs to feature vectors Dear Sir. First, I must solicit your
Overview. Efficient Simplification of Point-sampled Surfaces. Introduction. Introduction. Neighborhood. Local Surface Analysis
 Overview Efficient Simplification of Pointsampled Surfaces Introduction Local surface analysis Simplification methods Error measurement Comparison PointBased Computer Graphics Mark Pauly PointBased Computer
Overview Efficient Simplification of Pointsampled Surfaces Introduction Local surface analysis Simplification methods Error measurement Comparison PointBased Computer Graphics Mark Pauly PointBased Computer
Accommodation Assessments for Vehicle Occupants using Augmented Reality
 Accommodation Assessments for Vehicle Occupants using Augmented Reality Byoung-keon Daniel Park 1 and Matthew P. Reed 1 1 University of Michigan, Ann Arbor, MI 48109, USA keonpark@umich.edu Abstract. This
Accommodation Assessments for Vehicle Occupants using Augmented Reality Byoung-keon Daniel Park 1 and Matthew P. Reed 1 1 University of Michigan, Ann Arbor, MI 48109, USA keonpark@umich.edu Abstract. This
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
Locally Linear Landmarks for large-scale manifold learning
 Locally Linear Landmarks for large-scale manifold learning Max Vladymyrov and Miguel Á. Carreira-Perpiñán Electrical Engineering and Computer Science University of California, Merced http://eecs.ucmerced.edu
Locally Linear Landmarks for large-scale manifold learning Max Vladymyrov and Miguel Á. Carreira-Perpiñán Electrical Engineering and Computer Science University of California, Merced http://eecs.ucmerced.edu
Dimension Reduction of Image Manifolds
 Dimension Reduction of Image Manifolds Arian Maleki Department of Electrical Engineering Stanford University Stanford, CA, 9435, USA E-mail: arianm@stanford.edu I. INTRODUCTION Dimension reduction of datasets
Dimension Reduction of Image Manifolds Arian Maleki Department of Electrical Engineering Stanford University Stanford, CA, 9435, USA E-mail: arianm@stanford.edu I. INTRODUCTION Dimension reduction of datasets
Image Similarities for Learning Video Manifolds. Selen Atasoy MICCAI 2011 Tutorial
 Image Similarities for Learning Video Manifolds Selen Atasoy MICCAI 2011 Tutorial Image Spaces Image Manifolds Tenenbaum2000 Roweis2000 Tenenbaum2000 [Tenenbaum2000: J. B. Tenenbaum, V. Silva, J. C. Langford:
Image Similarities for Learning Video Manifolds Selen Atasoy MICCAI 2011 Tutorial Image Spaces Image Manifolds Tenenbaum2000 Roweis2000 Tenenbaum2000 [Tenenbaum2000: J. B. Tenenbaum, V. Silva, J. C. Langford:
An Adaptive Eigenshape Model
 An Adaptive Eigenshape Model Adam Baumberg and David Hogg School of Computer Studies University of Leeds, Leeds LS2 9JT, U.K. amb@scs.leeds.ac.uk Abstract There has been a great deal of recent interest
An Adaptive Eigenshape Model Adam Baumberg and David Hogg School of Computer Studies University of Leeds, Leeds LS2 9JT, U.K. amb@scs.leeds.ac.uk Abstract There has been a great deal of recent interest
Kernels and Clustering
 Kernels and Clustering Robert Platt Northeastern University All slides in this file are adapted from CS188 UC Berkeley Case-Based Learning Non-Separable Data Case-Based Reasoning Classification from similarity
Kernels and Clustering Robert Platt Northeastern University All slides in this file are adapted from CS188 UC Berkeley Case-Based Learning Non-Separable Data Case-Based Reasoning Classification from similarity
Multimedia Information Retrieval
 Multimedia Information Retrieval Prof Stefan Rüger Multimedia and Information Systems Knowledge Media Institute The Open University http://kmi.open.ac.uk/mmis Why content-based? Actually, what is content-based
Multimedia Information Retrieval Prof Stefan Rüger Multimedia and Information Systems Knowledge Media Institute The Open University http://kmi.open.ac.uk/mmis Why content-based? Actually, what is content-based
A Content Based Image Retrieval System Based on Color Features
 A Content Based Image Retrieval System Based on Features Irena Valova, University of Rousse Angel Kanchev, Department of Computer Systems and Technologies, Rousse, Bulgaria, Irena@ecs.ru.acad.bg Boris
A Content Based Image Retrieval System Based on Features Irena Valova, University of Rousse Angel Kanchev, Department of Computer Systems and Technologies, Rousse, Bulgaria, Irena@ecs.ru.acad.bg Boris
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces.
 weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces. joint work with (S. Osher, R. Fedkiw and M. Kang) Desired properties for surface reconstruction:
weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces. joint work with (S. Osher, R. Fedkiw and M. Kang) Desired properties for surface reconstruction:
Discrete geometry. Lecture 2. Alexander & Michael Bronstein tosca.cs.technion.ac.il/book
 Discrete geometry Lecture 2 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 The world is continuous, but the mind is discrete
Discrete geometry Lecture 2 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 The world is continuous, but the mind is discrete
Su et al. Shape Descriptors - III
 Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
IMAGE ANALYSIS, CLASSIFICATION, and CHANGE DETECTION in REMOTE SENSING
 SECOND EDITION IMAGE ANALYSIS, CLASSIFICATION, and CHANGE DETECTION in REMOTE SENSING ith Algorithms for ENVI/IDL Morton J. Canty с*' Q\ CRC Press Taylor &. Francis Group Boca Raton London New York CRC
SECOND EDITION IMAGE ANALYSIS, CLASSIFICATION, and CHANGE DETECTION in REMOTE SENSING ith Algorithms for ENVI/IDL Morton J. Canty с*' Q\ CRC Press Taylor &. Francis Group Boca Raton London New York CRC
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Indian Institute of Technology Kanpur. Visuomotor Learning Using Image Manifolds: ST-GK Problem
 Indian Institute of Technology Kanpur Introduction to Cognitive Science SE367A Visuomotor Learning Using Image Manifolds: ST-GK Problem Author: Anurag Misra Department of Computer Science and Engineering
Indian Institute of Technology Kanpur Introduction to Cognitive Science SE367A Visuomotor Learning Using Image Manifolds: ST-GK Problem Author: Anurag Misra Department of Computer Science and Engineering
Polygonal representation of 3D urban terrain point-cloud data
 Polygonal representation of 3D urban terrain point-cloud data part I Borislav Karaivanov The research is supported by ARO MURI 23 February 2011 USC 1 Description of problem Assumptions: unstructured 3D
Polygonal representation of 3D urban terrain point-cloud data part I Borislav Karaivanov The research is supported by ARO MURI 23 February 2011 USC 1 Description of problem Assumptions: unstructured 3D
Week 7 Picturing Network. Vahe and Bethany
 Week 7 Picturing Network Vahe and Bethany Freeman (2005) - Graphic Techniques for Exploring Social Network Data The two main goals of analyzing social network data are identification of cohesive groups
Week 7 Picturing Network Vahe and Bethany Freeman (2005) - Graphic Techniques for Exploring Social Network Data The two main goals of analyzing social network data are identification of cohesive groups
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching
 Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
L1 - Introduction. Contents. Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming
 L1 - Introduction Contents Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming 1 Definitions Computer-Aided Design (CAD) The technology concerned with the
L1 - Introduction Contents Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming 1 Definitions Computer-Aided Design (CAD) The technology concerned with the
Image Processing, Analysis and Machine Vision
 Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University