Lecture 10: Image Descriptors and Representation
|
|
|
- Frank Fields
- 6 years ago
- Views:
Transcription


 Thanks to G&W")
1 I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of New York (CUNY) Thanks to G&W website, Dr. Shahram Ebadollahi for slide materials 1
2 Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that are more suitable than the image itself. Benefits: Easier to understand Require fewer memory, faster to be processed More ready to be used 2
3 Outline Image Description Shape Descriptors Region Descriptors Texture & Texture Descriptors
4 Shape Description Shape Represented by its Boundary Shape Numbers, Fourier Descriptors, Statistical Moments Shape Represented by its Interior Topological Descriptors Moment Invariants 4
5 Boundary Representation: Chain Code Why boundary? The boundary is a good representation of an object shape and also requires a few memory. Chain codes: represent an object boundary by a connected sequence of straight line segments of specified length and direction. 5
6 Boundary Representation: Chain Code Object boundary (resampling) Boundary vertices 4-directional chain code 8-directional chain code 6
7 The First Difference of a Chain Codes Problem of a chain code: a chain code sequence depends on a starting point. Solution: treat a chain code as a circular sequence and redefine the starting point so that the resulting sequence of numbers forms an integer of minimum magnitude. The first difference of a chain code: counting the number of direction change (in counterclockwise) between 2 adjacent elements of the code. 7
8 The First Difference of a Chain Codes: Example 2 Example: Example: - a chain code: The first difference = Treating a chain code as a circular sequence, we get the first difference = Chain code : The first difference (counterclockwise) The first difference is rotational invariant. 8
")
9 Chain Code: example (First difference of chain code) 9
10 Boundary Descriptors 1. Simple boundary descriptors: we can use - Length of the boundary - The size of smallest circle or box that can totally enclosing the object 2. Shape number 3. Fourier descriptor 4. Statistical moments
11 Shape Numbers Shape number of the boundary definition: the first difference of smallest magnitude The order n of the shape number: the number of digits in the sequence
12 Shape Numbers Shape numbers of order 4, 6 and 8
13 Example: Shape Numbers 2. Find the smallest rectangle that fits the shape 1. Original boundary Chain code: First difference: Create grid 4. Find the nearest Grid. Shape No
14 Boundary descriptor Fourier Fourier descriptor: view a coordinate (x,y) as a complex number (x = real part and y = imaginary part) then apply the Fourier transform to a sequence of boundary points. Let s(k) be a coordinate s( k) x( k) jy( k) of a boundary point k : Fourier descriptor : a( u) 1 K K 1 k 0 s( k) e 2 uk / K Reconstruction formula Boundary points s( k) 1 K K 1 k 0 a( u) e 2 uk / K

15 Fourier Descriptor Properties

16 Boundary Reconstruction using Fourier Descriptors 2868 descriptors Only 8 descriptors 16

17 Polygon Approximation Represent an object boundary by a polygon Minimum perimeter polygon consists of line segments that minimize distances between boundary pixels. 17
18 Polygon Approximation: Splitting Techniques 1. Find the line joining 0. Object boundary two extreme points 2. Find the farthest points from the line 3. Draw a polygon 18

19 Boundary Representation: Signatures Represent 2-D boundary shape using 1-D signature signal 19
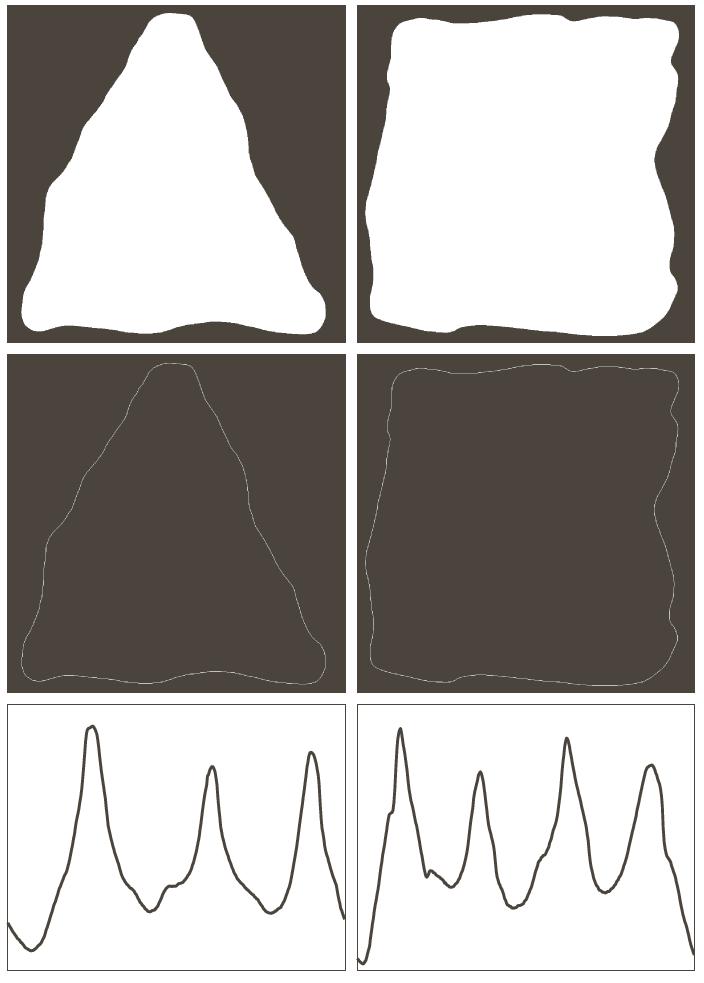
20 Boundary Representation: Signatures 20
21 Boundary Segments Concept: Partitioning an object boundary by using vertices of a convex hull. Partitioned boundary Convex hull (gray color) Object boundary 21

22 Skeletons Obtained from thinning or skeletonizing processes 22
23 Region Descriptors - Simple 23

24 Region Descriptors - Example White pixels represent light of the cities % of white pixels Region no. compared to the total white pixels % % 3 4.9% % Infrared image of America at night 24


25 Topological Region Descriptors Topological properties: Properties of image preserved under rubber-sheet distortions 25
 (Hudson river) After intensity Thresholding (1591 connected components with 39")
26 Topological Descriptors: example Original image: Infrared image Of Washington D.C. area The largest connected area (8479 Pixels) (Hudson river) After intensity Thresholding (1591 connected components with 39 holes) Euler no. = 1552 After thinning 26
27 Boundary Description: Statistical Moments Definition: the n th moment where ( r ) n m K 1 i 0 ( r K 1 i 0 i m ) r g ( i r i ) n g ( r i ) Example of moment: The first moment = mean The second moment = variance Boundary segment 1D graph 1. Convert a boundary segment into 1D graph 2. View a 1D graph as a PDF function 3. Compute the n th order moment of the graph 27
28 Geometric Moment Invariants 28
29 Central Moments 29

30 Moment Invariants (translation, scale, mirroring, rotation) 30
31 Moment Invariants (translation, scale, mirroring, rotation) 31
32 Affine Transform & Affine Moment Invariants 32
33 Affine Transform & Affine Moment Invariants 33
34 Elliptical Shape Descriptors 34

35 Texture - Definition Purpose: to describe pattern of the region. 35

36 Texture Quantification Methods 36
37 Statistical Texture Analysis 1st order statistics 37
 Cholesterol (coarse texture) Microprocessor (regular texture) 38")
38 Texture Examples: optical microscope images: B C A Superconductor (smooth texture) Cholesterol (coarse texture) Microprocessor (regular texture) 38
 A B")
39 Texture Example: The 2 nd moment = variance measure smoothness The 3 rd moment measure skewness The 4 th moment measure uniformity (flatness) A B C 39
40 Statistical Texture Analysis: 1st order statistics 40
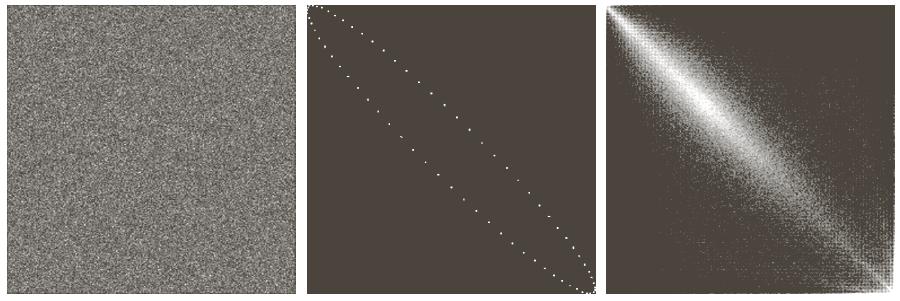
41 Statistical Texture Analysis: 2nd order statistics: Co-occurrence 41
42 Statistical Texture Analysis: 2nd order statistics: Co-occurrence 42
43 Statistical Texture Analysis: 2nd order statistics: Co-occurrence 43
44 Statistical Texture Analysis (Example) 44
45 Statistical Texture Analysis (Example) 45
46 Statistical Texture Analysis 2nd order statistics: Difference Statistics 46

47 Statistical Texture Analysis 2nd order statistics: Autocorrelation 47
48 48

49 49
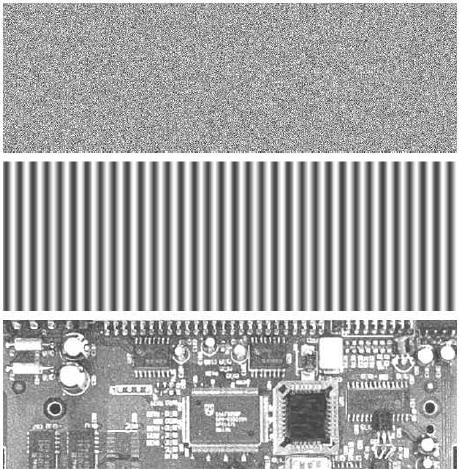
50 Fourier Approach for Texture Descriptor Concept: convert 2D spectrum into 1D graphs Original image FFT2D +FFTSHIFT Fourier coefficient image Divide into areas by angles Divide into areas by radius Sum all pixels in each area S( ) R 0 r 1 S r ( ) Sum all pixels in each area S( r) S ( r) 0 50

51 Fourier Approach for Texture Descriptor Original image 2D Spectrum (Fourier Tr.) S(r) S( ) Another image Another S( ) 51

52 Which descriptors? Image Feature Evaluation 52
53 Announcement Reading G&W Chapter 11 Next lecture: Object Recognition (Chapter 12) 53
Digital Image Processing Chapter 11: Image Description and Representation
 Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Chapter 11 Representation & Description
 Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
EECS490: Digital Image Processing. Lecture #23
 Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Lecture 18 Representation and description I. 2. Boundary descriptors
 Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Ulrik Söderström 21 Feb Representation and description
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Feature description. IE PŁ M. Strzelecki, P. Strumiłło
 Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Image representation. 1. Introduction
 Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
- Low-level image processing Image enhancement, restoration, transformation
 () Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
() Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
9 length of contour = no. of horizontal and vertical components + ( 2 no. of diagonal components) diameter of boundary B
 diameter of boundary B") 8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
Machine vision. Summary # 6: Shape descriptors
 Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Lecture 7: Morphological Image Processing
 I2200: Digital Image processing Lecture 7: Morphological Image Processing Prof. YingLi Tian Oct. 25, 2017 Department of Electrical Engineering The City College of New York The City University of New York
I2200: Digital Image processing Lecture 7: Morphological Image Processing Prof. YingLi Tian Oct. 25, 2017 Department of Electrical Engineering The City College of New York The City University of New York
Lecture 14 Shape. ch. 9, sec. 1-8, of Machine Vision by Wesley E. Snyder & Hairong Qi. Spring (CMU RI) : BioE 2630 (Pitt)
 : BioE 2630 (Pitt)") Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang
 Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
ECEN 447 Digital Image Processing
 ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
09/11/2017. Morphological image processing. Morphological image processing. Morphological image processing. Morphological image processing (binary)
") Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Anne Solberg
 INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EECS490: Digital Image Processing. Lecture #17
 Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
Digital Image Processing Lecture 7. Segmentation and labeling of objects. Methods for segmentation. Labeling, 2 different algorithms
 Digital Image Processing Lecture 7 p. Segmentation and labeling of objects p. Segmentation and labeling Region growing Region splitting and merging Labeling Watersheds MSER (extra, optional) More morphological
Digital Image Processing Lecture 7 p. Segmentation and labeling of objects p. Segmentation and labeling Region growing Region splitting and merging Labeling Watersheds MSER (extra, optional) More morphological
FROM PIXELS TO REGIONS
 Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Multimedia Information Retrieval
 Multimedia Information Retrieval Prof Stefan Rüger Multimedia and Information Systems Knowledge Media Institute The Open University http://kmi.open.ac.uk/mmis Why content-based? Actually, what is content-based
Multimedia Information Retrieval Prof Stefan Rüger Multimedia and Information Systems Knowledge Media Institute The Open University http://kmi.open.ac.uk/mmis Why content-based? Actually, what is content-based
Morphological Image Processing
 Digital Image Processing Lecture # 10 Morphological Image Processing Autumn 2012 Agenda Extraction of Connected Component Convex Hull Thinning Thickening Skeletonization Pruning Gray-scale Morphology Digital
Digital Image Processing Lecture # 10 Morphological Image Processing Autumn 2012 Agenda Extraction of Connected Component Convex Hull Thinning Thickening Skeletonization Pruning Gray-scale Morphology Digital
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
Image Processing, Analysis and Machine Vision
 Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
SUMMARY PART I. What is texture? Uses for texture analysis. Computing texture images. Using variance estimates. INF 4300 Digital Image Analysis
 INF 4 Digital Image Analysis SUMMARY PART I Fritz Albregtsen 4.. F 4.. INF 4 What is texture? Intuitively obvious, but no precise definition exists fine, coarse, grained, smooth etc Texture consists of
INF 4 Digital Image Analysis SUMMARY PART I Fritz Albregtsen 4.. F 4.. INF 4 What is texture? Intuitively obvious, but no precise definition exists fine, coarse, grained, smooth etc Texture consists of
IN5520 Digital Image Analysis. Two old exams. Practical information for any written exam Exam 4300/9305, Fritz Albregtsen
 IN5520 Digital Image Analysis Two old exams Practical information for any written exam Exam 4300/9305, 2016 Exam 4300/9305, 2017 Fritz Albregtsen 27.11.2018 F13 27.11.18 IN 5520 1 Practical information
IN5520 Digital Image Analysis Two old exams Practical information for any written exam Exam 4300/9305, 2016 Exam 4300/9305, 2017 Fritz Albregtsen 27.11.2018 F13 27.11.18 IN 5520 1 Practical information
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Computer Vision I - Basics of Image Processing Part 2
 Computer Vision I - Basics of Image Processing Part 2 Carsten Rother 07/11/2014 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Basics of Image Processing Part 2 Carsten Rother 07/11/2014 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
OBJECT DESCRIPTION - FEATURE EXTRACTION
 INF 4300 Digital Image Analysis OBJECT DESCRIPTION - FEATURE EXTRACTION Fritz Albregtsen 1.10.011 F06 1.10.011 INF 4300 1 Today We go through G&W section 11. Boundary Descriptors G&W section 11.3 Regional
INF 4300 Digital Image Analysis OBJECT DESCRIPTION - FEATURE EXTRACTION Fritz Albregtsen 1.10.011 F06 1.10.011 INF 4300 1 Today We go through G&W section 11. Boundary Descriptors G&W section 11.3 Regional
Computer Graphics and Image Processing
 Computer Graphics and Image Processing Lecture B2 Point Processing Joseph Niepce, 1826. The view from my window 1 Context How much input is used to compute an output value? Point Transforms Region Transforms
Computer Graphics and Image Processing Lecture B2 Point Processing Joseph Niepce, 1826. The view from my window 1 Context How much input is used to compute an output value? Point Transforms Region Transforms
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Image retrieval based on region shape similarity
 Image retrieval based on region shape similarity Cheng Chang Liu Wenyin Hongjiang Zhang Microsoft Research China, 49 Zhichun Road, Beijing 8, China {wyliu, hjzhang}@microsoft.com ABSTRACT This paper presents
Image retrieval based on region shape similarity Cheng Chang Liu Wenyin Hongjiang Zhang Microsoft Research China, 49 Zhichun Road, Beijing 8, China {wyliu, hjzhang}@microsoft.com ABSTRACT This paper presents
Digital Image Processing. Lecture # 15 Image Segmentation & Texture
 Digital Image Processing Lecture # 15 Image Segmentation & Texture 1 Image Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) Applications:
Digital Image Processing Lecture # 15 Image Segmentation & Texture 1 Image Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) Applications:
Geometric Transformations: Translation:
 Geometric Transformations: Translation: slide Reflection: Rotation: Dialation: mirror turn enlarge or reduce Notation: Pre-Image: original figure Image: after transformation. Use prime notation C A B C
Geometric Transformations: Translation: slide Reflection: Rotation: Dialation: mirror turn enlarge or reduce Notation: Pre-Image: original figure Image: after transformation. Use prime notation C A B C
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Lecture 5 2D Transformation
 Lecture 5 2D Transformation What is a transformation? In computer graphics an object can be transformed according to position, orientation and size. Exactly what it says - an operation that transforms
Lecture 5 2D Transformation What is a transformation? In computer graphics an object can be transformed according to position, orientation and size. Exactly what it says - an operation that transforms
Morphological Image Processing
 Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Chapter 3. Sukhwinder Singh
 Chapter 3 Sukhwinder Singh PIXEL ADDRESSING AND OBJECT GEOMETRY Object descriptions are given in a world reference frame, chosen to suit a particular application, and input world coordinates are ultimately
Chapter 3 Sukhwinder Singh PIXEL ADDRESSING AND OBJECT GEOMETRY Object descriptions are given in a world reference frame, chosen to suit a particular application, and input world coordinates are ultimately
2D Spline Curves. CS 4620 Lecture 18
 2D Spline Curves CS 4620 Lecture 18 2014 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes that is, without discontinuities So far we can make things with corners (lines,
2D Spline Curves CS 4620 Lecture 18 2014 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes that is, without discontinuities So far we can make things with corners (lines,
Morphological Image Processing
 Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
CS534 Introduction to Computer Vision Binary Image Analysis. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
Matching and Recognition in 3D. Based on slides by Tom Funkhouser and Misha Kazhdan
 Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Binary Image Processing. Introduction to Computer Vision CSE 152 Lecture 5
 Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
OCCHIO USA WHITE STONE VA TEL(866)
") PARAMETERS : 79 Weight factors: 6 Parameter Other name Symbol Definition Formula Number Volume V The volume of the particle volume model. Equivalent Volume The volume of the sphere having the same projection
PARAMETERS : 79 Weight factors: 6 Parameter Other name Symbol Definition Formula Number Volume V The volume of the particle volume model. Equivalent Volume The volume of the sphere having the same projection
COMP_4190 Artificial Intelligence Computer Vision. Computer Vision. Levels of Abstraction. Digital Images
 COMP_49 Artificial Intelligence Computer Vision Jacky Baltes Department of Computer Science University of Manitoba Winnipeg, Manitoba Canada, RT N jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
COMP_49 Artificial Intelligence Computer Vision Jacky Baltes Department of Computer Science University of Manitoba Winnipeg, Manitoba Canada, RT N jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
a triangle with all acute angles acute triangle angles that share a common side and vertex adjacent angles alternate exterior angles
 acute triangle a triangle with all acute angles adjacent angles angles that share a common side and vertex alternate exterior angles two non-adjacent exterior angles on opposite sides of the transversal;
acute triangle a triangle with all acute angles adjacent angles angles that share a common side and vertex alternate exterior angles two non-adjacent exterior angles on opposite sides of the transversal;
SUMMARY PART I. Variance, 2, is directly a measure of roughness. A bounded measure of smoothness is
 Digital Image Analsis SUMMARY PART I Fritz Albregtsen 4..6 Teture description of regions Remember: we estimate local properties (features) to be able to isolate regions which are similar in an image (segmentation),
Digital Image Analsis SUMMARY PART I Fritz Albregtsen 4..6 Teture description of regions Remember: we estimate local properties (features) to be able to isolate regions which are similar in an image (segmentation),
SI-100 Digital Microscope. User Manual
 SI-100 Digital Microscope User Manual Read this manual before use Keep for future reference Content 1 Introduction... 3 1.1 About The SI-100... 3 1.2 Advantage of SI-100... 3 1.3 Product Specification...
SI-100 Digital Microscope User Manual Read this manual before use Keep for future reference Content 1 Introduction... 3 1.1 About The SI-100... 3 1.2 Advantage of SI-100... 3 1.3 Product Specification...
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Lecture 3: Binary Subtraction, Switching Algebra, Gates, and Algebraic Expressions
 EE210: Switching Systems Lecture 3: Binary Subtraction, Switching Algebra, Gates, and Algebraic Expressions Prof. YingLi Tian Feb. 5/7, 2019 Department of Electrical Engineering The City College of New
EE210: Switching Systems Lecture 3: Binary Subtraction, Switching Algebra, Gates, and Algebraic Expressions Prof. YingLi Tian Feb. 5/7, 2019 Department of Electrical Engineering The City College of New
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Dietrich Paulus Joachim Hornegger. Pattern Recognition of Images and Speech in C++
 Dietrich Paulus Joachim Hornegger Pattern Recognition of Images and Speech in C++ To Dorothea, Belinda, and Dominik In the text we use the following names which are protected, trademarks owned by a company
Dietrich Paulus Joachim Hornegger Pattern Recognition of Images and Speech in C++ To Dorothea, Belinda, and Dominik In the text we use the following names which are protected, trademarks owned by a company
Requirements for region detection
 Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Math 7, Unit 8: Geometric Figures Notes
 Math 7, Unit 8: Geometric Figures Notes Points, Lines and Planes; Line Segments and Rays s we begin any new topic, we have to familiarize ourselves with the language and notation to be successful. My guess
Math 7, Unit 8: Geometric Figures Notes Points, Lines and Planes; Line Segments and Rays s we begin any new topic, we have to familiarize ourselves with the language and notation to be successful. My guess
6. Applications - Text recognition in videos - Semantic video analysis
 6. Applications - Text recognition in videos - Semantic video analysis Stephan Kopf 1 Motivation Goal: Segmentation and classification of characters Only few significant features are visible in these simple
6. Applications - Text recognition in videos - Semantic video analysis Stephan Kopf 1 Motivation Goal: Segmentation and classification of characters Only few significant features are visible in these simple
CSE 167: Introduction to Computer Graphics Lecture 12: Bézier Curves. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013
 CSE 167: Introduction to Computer Graphics Lecture 12: Bézier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Announcements Homework assignment 5 due tomorrow, Nov
CSE 167: Introduction to Computer Graphics Lecture 12: Bézier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Announcements Homework assignment 5 due tomorrow, Nov
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Lecture IV Bézier Curves
 Lecture IV Bézier Curves Why Curves? Why Curves? Why Curves? Why Curves? Why Curves? Linear (flat) Curved Easier More pieces Looks ugly Complicated Fewer pieces Looks smooth What is a curve? Intuitively:
Lecture IV Bézier Curves Why Curves? Why Curves? Why Curves? Why Curves? Why Curves? Linear (flat) Curved Easier More pieces Looks ugly Complicated Fewer pieces Looks smooth What is a curve? Intuitively:
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
11. Gray-Scale Morphology. Computer Engineering, i Sejong University. Dongil Han
 Computer Vision 11. Gray-Scale Morphology Computer Engineering, i Sejong University i Dongil Han Introduction Methematical morphology represents image objects as sets in a Euclidean space by Serra [1982],
Computer Vision 11. Gray-Scale Morphology Computer Engineering, i Sejong University i Dongil Han Introduction Methematical morphology represents image objects as sets in a Euclidean space by Serra [1982],
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Analytical and Computer Cartography Winter Lecture 9: Geometric Map Transformations
 Analytical and Computer Cartography Winter 2017 Lecture 9: Geometric Map Transformations Cartographic Transformations Attribute Data (e.g. classification) Locational properties (e.g. projection) Graphics
Analytical and Computer Cartography Winter 2017 Lecture 9: Geometric Map Transformations Cartographic Transformations Attribute Data (e.g. classification) Locational properties (e.g. projection) Graphics
Filtering Images. Contents
 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Problem definition Image acquisition Image segmentation Connected component analysis. Machine vision systems - 1
 Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Mathematical Morphology and Distance Transforms. Robin Strand
 Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Today s class. Geometric objects and transformations. Informationsteknologi. Wednesday, November 7, 2007 Computer Graphics - Class 5 1
 Toda s class Geometric objects and transformations Wednesda, November 7, 27 Computer Graphics - Class 5 Vector operations Review of vector operations needed for working in computer graphics adding two
Toda s class Geometric objects and transformations Wednesda, November 7, 27 Computer Graphics - Class 5 Vector operations Review of vector operations needed for working in computer graphics adding two
Lecture 4: Spatial Domain Transformations
 # Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
# Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
Image Enhancement: To improve the quality of images
 Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
Introduction. Computer Vision & Digital Image Processing. Preview. Basic Concepts from Set Theory
 Introduction Computer Vision & Digital Image Processing Morphological Image Processing I Morphology a branch of biology concerned with the form and structure of plants and animals Mathematical morphology
Introduction Computer Vision & Digital Image Processing Morphological Image Processing I Morphology a branch of biology concerned with the form and structure of plants and animals Mathematical morphology
A taxonomy of boundary descriptions
 A taxonomy of boundary descriptions (1) Model the best fit of a simple mathematical object Conics, conic splines, log-spirals, and other geometric objects Polynomials Circular functions (2) Redescribe
A taxonomy of boundary descriptions (1) Model the best fit of a simple mathematical object Conics, conic splines, log-spirals, and other geometric objects Polynomials Circular functions (2) Redescribe
CPSC 695. Geometric Algorithms in Biometrics. Dr. Marina L. Gavrilova
 CPSC 695 Geometric Algorithms in Biometrics Dr. Marina L. Gavrilova Biometric goals Verify users Identify users Synthesis - recently Biometric identifiers Courtesy of Bromba GmbH Classification of identifiers
CPSC 695 Geometric Algorithms in Biometrics Dr. Marina L. Gavrilova Biometric goals Verify users Identify users Synthesis - recently Biometric identifiers Courtesy of Bromba GmbH Classification of identifiers
CURVES OF CONSTANT WIDTH AND THEIR SHADOWS. Have you ever wondered why a manhole cover is in the shape of a circle? This
 CURVES OF CONSTANT WIDTH AND THEIR SHADOWS LUCIE PACIOTTI Abstract. In this paper we will investigate curves of constant width and the shadows that they cast. We will compute shadow functions for the circle,
CURVES OF CONSTANT WIDTH AND THEIR SHADOWS LUCIE PACIOTTI Abstract. In this paper we will investigate curves of constant width and the shadows that they cast. We will compute shadow functions for the circle,
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 24 Solid Modelling
 Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 24 Solid Modelling Welcome to the lectures on computer graphics. We have
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 24 Solid Modelling Welcome to the lectures on computer graphics. We have
CSE 167: Introduction to Computer Graphics Lecture #11: Bezier Curves. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016
 CSE 167: Introduction to Computer Graphics Lecture #11: Bezier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Project 3 due tomorrow Midterm 2 next
CSE 167: Introduction to Computer Graphics Lecture #11: Bezier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Project 3 due tomorrow Midterm 2 next
1/60. Geometric Algorithms. Lecture 1: Introduction. Convex Hulls
 1/60 Geometric Algorithms Lecture 1: Introduction Convex Hulls Geometric algorithms scope 2/60 Geometry algorithms (practice): Study of geometric problems that arise in various applications and how algorithms
1/60 Geometric Algorithms Lecture 1: Introduction Convex Hulls Geometric algorithms scope 2/60 Geometry algorithms (practice): Study of geometric problems that arise in various applications and how algorithms
Math 7, Unit 08: Geometric Figures Notes
 Math 7, Unit 08: Geometric Figures Notes Points, Lines and Planes; Line Segments and Rays s we begin any new topic, we have to familiarize ourselves with the language and notation to be successful. My
Math 7, Unit 08: Geometric Figures Notes Points, Lines and Planes; Line Segments and Rays s we begin any new topic, we have to familiarize ourselves with the language and notation to be successful. My
Raghuraman Gopalan Center for Automation Research University of Maryland, College Park
 2D Shape Matching (and Object Recognition) Raghuraman Gopalan Center for Automation Research University of Maryland, College Park 1 Outline What is a shape? Part 1: Matching/ Recognition Shape contexts
2D Shape Matching (and Object Recognition) Raghuraman Gopalan Center for Automation Research University of Maryland, College Park 1 Outline What is a shape? Part 1: Matching/ Recognition Shape contexts
Glossary of dictionary terms in the AP geometry units
 Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
2D Spline Curves. CS 4620 Lecture 13
 2D Spline Curves CS 4620 Lecture 13 2008 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes [Boeing] that is, without discontinuities So far we can make things with corners
2D Spline Curves CS 4620 Lecture 13 2008 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes [Boeing] that is, without discontinuities So far we can make things with corners
Course Number: Course Title: Geometry
 Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
CSCI 4620/8626. Coordinate Reference Frames
 CSCI 4620/8626 Computer Graphics Graphics Output Primitives Last update: 2014-02-03 Coordinate Reference Frames To describe a picture, the world-coordinate reference frame (2D or 3D) must be selected.
CSCI 4620/8626 Computer Graphics Graphics Output Primitives Last update: 2014-02-03 Coordinate Reference Frames To describe a picture, the world-coordinate reference frame (2D or 3D) must be selected.