Motion estimation. Lihi Zelnik-Manor
|
|
|
- Byron Allison
- 6 years ago
- Views:
Transcription
1 Motion estimation Lihi Zelnik-Manor
2 Optical Flow Where did each piel in image 1 go to in image 2

3 Optical Flow Pierre Kornprobst's Demo

4 ntroduction Given a video sequence with camera/objects moving we can better understand the scene if we find the motions of the camera/objects.
5 Scene nterpretation How is the camera moving? How man moving objects are there? Which directions are the moving in? How fast are the moving? Can we recognize their tpe of motion (e.g. walking, running, etc.)?

6 Applications Recover camera ego-motion. Result b MobilEe (

7 Applications Motion segmentation Result b: L.Zelnik-Manor, M.Machline, M.rani Multi-bod Segmentation: Revisiting Motion Consistenc To appear, JCV


8 Applications Structure from Motion nput Reconstructed shape Result b: L. Zhang, B. Curless, A. Hertzmann, S.M. Seitz Shape and motion under varing illumination: Unifing structure from motion, photometric stereo, and multi-view stereo CCV 03




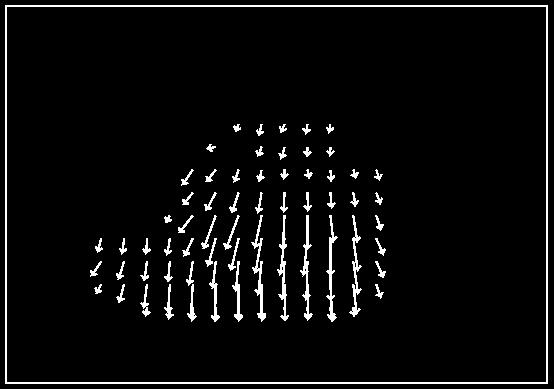
9 Eamples of Motion fields Forward motion Rotation Horizontal translation Closer objects appear to move faster!!
10 Motion Field & Optical Flow Field Motion Field = Real world 3D motion Optical Flow Field = Projection of the motion field onto the 2d image CCD 3D motion vector 2D optical flow vector u= u,v ( )
11 When does it break? The screen is stationar et displas motion Homogeneous objects generate zero optical flow. Fied sphere. Changing light source. Non-rigid teture motion
12 The Optical Flow Field Still, in man cases it does work. Goal: Find for each piel a velocit vector which sas: How quickl is the piel moving across the image n which direction it is moving u= ( u,v)
13 How do we actuall do that?
14 Estimating Optical Flow Assume the image intensit is constant Time = t Time = tdt (, ) d, d ( ), = (, t) ( d, d, t dt)
15 Brightness Constanc Equation,, t = d, d, t dt ( ) ( ) First order Talor Epansion Simplif notations: Divide b dt and denote: =, t (, t) d d dt d d dt u= u d dt v= v = t d dt = 0 t Gradient and flow are orthogonal Problem : One equation, two unknowns
16 Problem : The Aperture Problem For points on a line of fied intensit we can onl recover the normal flow Time t Time tdt? Where did the blue point move to? We need additional constraints
17 Use Local nformation Sometimes enlarging the aperture can help
18 Local smoothness Lucas Kanade (1984) Assume constant (u,v) in small neighborhood t v u = [ ] t v u = = t t v u A = b u
19 Lucas Kanade (1984) Goal: Minimize Au b 2 Method: Least-Squares A u = b A T A u = A T b 21 u = ( T ) 1 T A A A b
20 How does Lucas-Kanade behave? = 2 2 T A A We want this matri to be invertible. i.e., no zero eigenvalues ( ) b A A A T T 1 u =
21 How does Lucas-Kanade behave? Edge A T A becomes singular (, ) (, ) 2 2 = 0 0 is eigenvector with eigenvalue 0
22 How does Lucas-Kanade behave? Homogeneous ( ) 0, A T A 0 0 eigenvalues
23 How does Lucas-Kanade behave? Tetured regions two high eigenvalues ( ) 0,
24 How does Lucas-Kanade behave? Edge A T A becomes singular Homogeneous regions low gradients High teture A T A 0
25 terative Refinement Estimate velocit at each piel using one iteration of Lucas and Kanade estimation u = Warp one image toward the other using the estimated flow field (easier said than done) ( T ) 1 T A A A b Refine estimate b repeating the process

26 Optical Flow: terative Estimation estimate update û nitial guess: Estimate: u 0 = 0 1= ˆ 0 u u u 0
27 Optical Flow: terative Estimation f ( u ) 1 1 estimate update û nitial guess: Estimate: u 1 u ˆ 2 = u1 u 0
28 Optical Flow: terative Estimation f ( u ) 1 2 estimate update û nitial guess: Estimate: u 2 3 = ˆ 2 u u u 0
 f ( ) 1")
29 Optical Flow: terative Estimation f ( u ) f ( )
30 Optical Flow: terative Estimation Some mplementation ssues: Warping is not eas (ensure that errors in warping are smaller than the estimate refinement) Warp one image, take derivatives of the other so ou don t need to re-compute the gradient after each iteration. Often useful to low-pass filter the images before motion estimation (for better derivative estimation, and linear approimations to image intensit)
31 Other break-downs Brightness constanc is not satisfied Correlation based methods A point does not move like its neighbors what is the ideal window size? Regularization based methods The motion is not small (Talor epansion doesn t hold) Aliasing Use multi-scale estimation
 To overcome aliasing: coarse-to to-fine estimation. nearest match is incorrect (aliasing)")
32 Optical Flow: Aliasing Temporal aliasing causes ambiguities in optical flow because images can have man piels with the same intensit..e., how do we know which correspondence is correct? actual shift estimated shift nearest match is correct (no aliasing) To overcome aliasing: coarse-to to-fine estimation. nearest match is incorrect (aliasing)
33 Multi-Scale Flow Estimation u=1.25 piels u=2.5 piels u=5 piels image t-1 u=10 piels image t1 Gaussian pramid of image t Gaussian pramid of image t1
34 Multi-Scale Flow Estimation run Lucas-Kanade warp & upsample run Lucas-Kanade... image t-1 image t1 Gaussian pramid of image t Gaussian pramid of image t1

35 Eamples: Motion Based Segmentation nput Segmentation result Result b: L.Zelnik-Manor, M.Machline, M.rani Multi-bod Segmentation: Revisiting Motion Consistenc To appear, JCV


36 Eamples: Motion Based Segmentation nput Segmentation result Result b: L.Zelnik-Manor, M.Machline, M.rani Multi-bod Segmentation: Revisiting Motion Consistenc To appear, JCV
37 Other break-downs Brightness constanc is not satisfied Correlation based methods A point does not move like its neighbors what is the ideal window size? Regularization based methods The motion is not small (Talor epansion doesn t hold) Aliasing Use multi-scale estimation
38 Robust Estimation Sources of outliers (multiple motions): specularities / highlights jpeg artifacts / interlacing / motion blur multiple motions (occlusion boundaries, transparenc) Noise distributions are often non-gaussian, having much heavier tails. Noise samples from the tails are called outliers.
39 Regularization Horn and Schunk (1981) Add global smoothness term Smoothness error: Error in brightness constanc equation E E ( 2 2) ( 2 2 u u v v ) dd s = D ( ) 2 u v dd c = D t Minimize: E λ c E s Solve b calculus of variations
40 Robust Estimation Black & Anandan (1993) Regularization can over-smooth across edges Use smarter regularization
41 Least Squares Estimation Standard Least Squares Estimation allows too much influence for outling points ) ( ) ) ( ) ( ) ( ) ( 2 m m m E i i i i i = = = = ρ ψ ρ ρ ( nfluence
42 Robust Estimation Problem: Least-squares estimators penalize deviations between data & model with quadratic error f n (etremel sensitive to outliers) error penalt function influence function Redescending error functions (e.g., Geman-McClure) help to reduce the influence of outling measurements. error penalt function influence function
43 Robust Estimation Black & Anandan (1993) Regularization can over-smooth across edges Use smarter regularization Minimize: D ( u v ) λ[ ρ ( u u ) ( v v )] dd 1 t 2, ρ2, ρ Brightness constanc Smoothness

44 Eamples: Motion Based Segmentation nput Segmentation result Optical Flow estimation b: M. J. Black and P. Anandan, A framework for the robust estimation of optical flow, CCV 93 Segmentation b: L.Zelnik-Manor, M.Machline, M.rani Multi-bod Segmentation: Revisiting Motion Consistenc, JCV 06
45 Parametric motion estimation
46 Global (parametric) motion models 2D Models: Affine Quadratic Planar projective transform (Homograph) 3D Models: nstantaneous camera motion models Homographepipole PlaneParalla





47 Motion models Translation Affine Perspective 3D rotation 2 unknowns 6 unknowns 8 unknowns 3 unknowns
48 Affine Motion For panning camera or planar surfaces: p p p v p p p u = = t p p p p p p = ) ( ) ( [ ] t = p Onl 6 parameters to solve for Better results Least Square Minimization (over all piels): [ ] 2 = a Err ) ( [ ] t p
49 Quadratic instantaneous approimation to planar motion Other 2D Motion Models q q q q q v q q q q q u = = v u h h h h h h h h h h h h = = = = ', ' and ' ' Projective eact planar motion
50 3D Motion Models Z T T v Z T T u Z Y Z Y X Z X Z Y X ) ( ) (1 ) ( ) (1 2 2 Ω Ω Ω = Ω Ω Ω = v u t h h h t h h h t h h h t h h h = = = = ', ' : and ' ' γ γ γ γ ) ( 1 ) ( t t t v t t t u w w = = = = γ γ γ γ Local Parameter: Z Y X Z Y X T T T,,,,, Ω Ω Ω ), ( Z nstantaneous camera motion: Global parameters: Global parameters: ,,,,, t t t h h ), ( γ HomographEpipole Local Parameter: Residual Planar Paralla Motion Global parameters: 3 2 1,, t t t ), ( γ Local Parameter:

51 Segmentation of Affine Motion = nput Segmentation result Result b: L.Zelnik-Manor, M.rani Multi-frame estimation of planar motion, PAM 2000


52 Panoramas nput Motion estimation b Andrew Zisserman s group


53 Stabilization Result b: L.Zelnik-Manor, M.rani Multi-frame estimation of planar motion, PAM 2000
54 Sparse matching
 How do")


55 Patch matching (revisited) How do we determine correspondences? block matching or SSD (sum squared differences)
56 Correlation and SSD For larger displacements, do template matching Define a small area around a piel as the template Match the template against each piel within a search area in net image. Use a match measure such as correlation, normalized correlation, or sum-of-squares difference Choose the maimum (or minimum) as the match Sub-piel estimate (Lucas-Kanade)
57 Discrete Search vs. Gradient Based Consider image translated b 2 1, 0 0 2, 1 )), ( ), ( ), ( ( )), ( ), ( ( ), ( v v u u v u v u E η = = u 0,v 0 ), ( ), ( ), ( ), ( ), ( v u η = = The discrete search method simpl searches for the best estimate. The gradient method linearizes the intensit function and solves for the estimate

58 Tracking result
59 Laered Scene Representations

60 Motion representations How can we describe this scene?

61 Block-based motion prediction Break image up into square blocks Estimate translation for each block Use this to predict net frame, code difference (MPEG-2)



62 Laered motion Break image sequence up into laers : = Describe each laer s motion
63 Laered Representation For scenes with multiple affine motions Estimate dominant motion parameters Reject piels which do not fit Convergence Restart on remaining piels

64 Some Results Nebojsa Jojic and Brendan Fre, "Learning Fleible Sprites in Video Laers, CVPR 2001.
65 A bit more fun Action Recognition
66 Recognizing Actions at a Distance A.A. Efros, A.C. Berg, G. Mori, J. Malik mage frame Optical flow F, Use optical flow as a template for frame classification





67 Recognizing Actions at a Distance A.A. Efros, A.C. Berg, G. Mori, J. Malik mage frame Optical flow F, F, F F, F, F, F blurred F, F, F, F

68 Recognizing Actions at a Distance A.A. Efros, A.C. Berg, G. Mori, J. Malik Database: Test sequence: For each frame in test sequence find closest frame in database
69 Recognizing Actions at a Distance A.A. Efros, A.C. Berg, G. Mori, J. Malik Red bars show classification results
70 Recognizing Actions at a Distance A.A. Efros, A.C. Berg, G. Mori, J. Malik View Greg n World Cup video
71 References on Optical Flow Lucas-Kanade method: B.D. Lucas and T. Kanade An terative mage Registration Technique with an Application to Stereo Vision JCA '81 pp S. Baker and. Matthews Lucas-Kanade 20 Years On: A Unifing Framework JCV, Vol. 56, No. 3, March, 2004, pp (papers code) Regularization based methods: B. K. P. Horn and B. Schunck, "Determining Optical Flow," Artificial ntelligence, 17 (1981), pp Black, M. J. and Anandan, P., A framework for the robust estimation of optical flow, CCV 93, Ma, 1993, pp (papers code) Comparison of various optical flow techniques: Barron, J.L., Fleet, D.J., and Beauchemin, S. Performance of optical flow techniques. JCV, 1994, 12(1):43-77 Laered representation (affine): James R. Bergen P. Anandan Keith J. Hanna Rajesh Hingorani Hierarchical Model- Based Motion Estimation ECCV 92, pp
72 That s all for toda

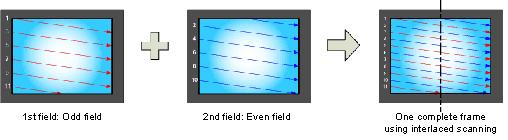

73 nterlace vs. progressive scan

74 Progressive scan

75 nterlace
76 Progressive scan vs. intelaced sensors Most camcorders are interlaced several eceptions (check the specs before ou bu!) some can be switched between progressive and interlaced Used to be true also for video cameras (interlaced) But now it s becoming the opposite man/most digital video cameras are progressive scan
Computer Vision Lecture 20
 Computer Vision Lecture 2 Motion and Optical Flow Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de 28.1.216 Man slides adapted from K. Grauman, S. Seitz, R. Szeliski,
Computer Vision Lecture 2 Motion and Optical Flow Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de 28.1.216 Man slides adapted from K. Grauman, S. Seitz, R. Szeliski,
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Optical flow. Cordelia Schmid
 Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
Optical flow. Cordelia Schmid
 Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
Optical flow Cordelia Schmid Motion field The motion field is the projection of the 3D scene motion into the image Optical flow Definition: optical flow is the apparent motion of brightness patterns in
Optical Flow-Based Motion Estimation. Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides.
 Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Lecture 19: Motion. Effect of window size 11/20/2007. Sources of error in correspondences. Review Problem set 3. Tuesday, Nov 20
 Lecture 19: Motion Review Problem set 3 Dense stereo matching Sparse stereo matching Indexing scenes Tuesda, Nov 0 Effect of window size W = 3 W = 0 Want window large enough to have sufficient intensit
Lecture 19: Motion Review Problem set 3 Dense stereo matching Sparse stereo matching Indexing scenes Tuesda, Nov 0 Effect of window size W = 3 W = 0 Want window large enough to have sufficient intensit
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Visual motion. Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys
 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes Motion and perceptual organization Sometimes, motion is the onl cue Motion and perceptual organization Sometimes, motion is the
Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes Motion and perceptual organization Sometimes, motion is the onl cue Motion and perceptual organization Sometimes, motion is the
Lecture 16: Computer Vision
 CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
Lucas-Kanade Motion Estimation. Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides.
 Lucas-Kanade Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Lucas-Kanade Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
EECS 556 Image Processing W 09
 EECS 556 Image Processing W 09 Motion estimation Global vs. Local Motion Block Motion Estimation Optical Flow Estimation (normal equation) Man slides of this lecture are courtes of prof Milanfar (UCSC)
EECS 556 Image Processing W 09 Motion estimation Global vs. Local Motion Block Motion Estimation Optical Flow Estimation (normal equation) Man slides of this lecture are courtes of prof Milanfar (UCSC)
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Computer Vision Lecture 18
 Course Outline Computer Vision Lecture 8 Motion and Optical Flow.0.009 Bastian Leibe RWTH Aachen http://www.umic.rwth-aachen.de/multimedia leibe@umic.rwth-aachen.de Man slides adapted from K. Grauman,
Course Outline Computer Vision Lecture 8 Motion and Optical Flow.0.009 Bastian Leibe RWTH Aachen http://www.umic.rwth-aachen.de/multimedia leibe@umic.rwth-aachen.de Man slides adapted from K. Grauman,
Comparison between Motion Analysis and Stereo
 MOTION ESTIMATION The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Octavia Camps (Northeastern); including their own slides. Comparison between Motion Analysis
MOTION ESTIMATION The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Octavia Camps (Northeastern); including their own slides. Comparison between Motion Analysis
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
VC 11/12 T11 Optical Flow
 VC 11/12 T11 Optical Flow Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Optical Flow Constraint Equation Aperture
VC 11/12 T11 Optical Flow Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Optical Flow Constraint Equation Aperture
Optical flow and tracking
 EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Particle Tracking. For Bulk Material Handling Systems Using DEM Models. By: Jordan Pease
 Particle Tracking For Bulk Material Handling Systems Using DEM Models By: Jordan Pease Introduction Motivation for project Particle Tracking Application to DEM models Experimental Results Future Work References
Particle Tracking For Bulk Material Handling Systems Using DEM Models By: Jordan Pease Introduction Motivation for project Particle Tracking Application to DEM models Experimental Results Future Work References
Motion and Optical Flow. Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi
 Motion and Optical Flow Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion and Optical Flow Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Optical Flow Estimation
 Optical Flow Estimation Goal: Introduction to image motion and 2D optical flow estimation. Motivation: Motion is a rich source of information about the world: segmentation surface structure from parallax
Optical Flow Estimation Goal: Introduction to image motion and 2D optical flow estimation. Motivation: Motion is a rich source of information about the world: segmentation surface structure from parallax
Overview. Video. Overview 4/7/2008. Optical flow. Why estimate motion? Motion estimation: Optical flow. Motion Magnification Colorization.
 Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Mariya Zhariy. Uttendorf Introduction to Optical Flow. Mariya Zhariy. Introduction. Determining. Optical Flow. Results. Motivation Definition
 to Constraint to Uttendorf 2005 Contents to Constraint 1 Contents to Constraint 1 2 Constraint Contents to Constraint 1 2 Constraint 3 Visual cranial reflex(vcr)(?) to Constraint Rapidly changing scene
to Constraint to Uttendorf 2005 Contents to Constraint 1 Contents to Constraint 1 2 Constraint Contents to Constraint 1 2 Constraint 3 Visual cranial reflex(vcr)(?) to Constraint Rapidly changing scene
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
SURVEY OF LOCAL AND GLOBAL OPTICAL FLOW WITH COARSE TO FINE METHOD
 SURVEY OF LOCAL AND GLOBAL OPTICAL FLOW WITH COARSE TO FINE METHOD M.E-II, Department of Computer Engineering, PICT, Pune ABSTRACT: Optical flow as an image processing technique finds its applications
SURVEY OF LOCAL AND GLOBAL OPTICAL FLOW WITH COARSE TO FINE METHOD M.E-II, Department of Computer Engineering, PICT, Pune ABSTRACT: Optical flow as an image processing technique finds its applications
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29,
 Variations on the Hermann grid: an extinction illusion. Perception, 29,") Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski
 with a lot of slides stolen from Steve Seitz and Rick Szeliski") Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Today Go over Midterm Go over Project #3
Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Today Go over Midterm Go over Project #3
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
CAP5415-Computer Vision Lecture 8-Mo8on Models, Feature Tracking, and Alignment. Ulas Bagci
 CAP545-Computer Vision Lecture 8-Mo8on Models, Feature Tracking, and Alignment Ulas Bagci bagci@ucf.edu Readings Szeliski, R. Ch. 7 Bergen et al. ECCV 92, pp. 237-252. Shi, J. and Tomasi, C. CVPR 94, pp.593-6.
CAP545-Computer Vision Lecture 8-Mo8on Models, Feature Tracking, and Alignment Ulas Bagci bagci@ucf.edu Readings Szeliski, R. Ch. 7 Bergen et al. ECCV 92, pp. 237-252. Shi, J. and Tomasi, C. CVPR 94, pp.593-6.
Notes 9: Optical Flow
 Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Lecture 20: Tracking. Tuesday, Nov 27
 Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
Motion. 1 Introduction. 2 Optical Flow. Sohaib A Khan. 2.1 Brightness Constancy Equation
 Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
EE 264: Image Processing and Reconstruction. Image Motion Estimation II. EE 264: Image Processing and Reconstruction. Outline
 Peman Milanar Image Motion Estimation II Peman Milanar Outline. Introduction to Motion. Wh Estimate Motion? 3. Global s. Local Motion 4. Block Motion Estimation 5. Optical Flow Estimation Basics 6. Optical
Peman Milanar Image Motion Estimation II Peman Milanar Outline. Introduction to Motion. Wh Estimate Motion? 3. Global s. Local Motion 4. Block Motion Estimation 5. Optical Flow Estimation Basics 6. Optical
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
COMPUTER VISION > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE
 COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
Motion and Tracking. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Last Lecture. Edge Detection. Filtering Pyramid
 Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam T. Roweis and William T.
Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam T. Roweis and William T.
Spatial track: motion modeling
 Spatial track: motion modeling Virginio Cantoni Computer Vision and Multimedia Lab Università di Pavia Via A. Ferrata 1, 27100 Pavia virginio.cantoni@unipv.it http://vision.unipv.it/va 1 Comparison between
Spatial track: motion modeling Virginio Cantoni Computer Vision and Multimedia Lab Università di Pavia Via A. Ferrata 1, 27100 Pavia virginio.cantoni@unipv.it http://vision.unipv.it/va 1 Comparison between
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Announcements. Computer Vision I. Motion Field Equation. Revisiting the small motion assumption. Visual Tracking. CSE252A Lecture 19.
 Visual Tracking CSE252A Lecture 19 Hw 4 assigned Announcements No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Motion Field Equation Measurements I x = I x, T: Components
Visual Tracking CSE252A Lecture 19 Hw 4 assigned Announcements No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Motion Field Equation Measurements I x = I x, T: Components
CS 2770: Intro to Computer Vision. Multiple Views. Prof. Adriana Kovashka University of Pittsburgh March 14, 2017
 CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
How is project #1 going?
 How is project # going? Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam
How is project # going? Last Lecture Edge Detection Filtering Pramid Toda Motion Deblur Image Transformation Removing Camera Shake from a Single Photograph Rob Fergus, Barun Singh, Aaron Hertzmann, Sam
Comparison Between The Optical Flow Computational Techniques
 Comparison Between The Optical Flow Computational Techniques Sri Devi Thota #1, Kanaka Sunanda Vemulapalli* 2, Kartheek Chintalapati* 3, Phanindra Sai Srinivas Gudipudi* 4 # Associate Professor, Dept.
Comparison Between The Optical Flow Computational Techniques Sri Devi Thota #1, Kanaka Sunanda Vemulapalli* 2, Kartheek Chintalapati* 3, Phanindra Sai Srinivas Gudipudi* 4 # Associate Professor, Dept.
Photo by Carl Warner
 Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Announcements. Recognition I. Optical Flow: Where do pixels move to? dy dt. I + y. I = x. di dt. dx dt. = t
 Announcements I Introduction to Computer Vision CSE 152 Lecture 18 Assignment 4: Due Toda Assignment 5: Posted toda Read: Trucco & Verri, Chapter 10 on recognition Final Eam: Wed, 6/9/04, 11:30-2:30, WLH
Announcements I Introduction to Computer Vision CSE 152 Lecture 18 Assignment 4: Due Toda Assignment 5: Posted toda Read: Trucco & Verri, Chapter 10 on recognition Final Eam: Wed, 6/9/04, 11:30-2:30, WLH
Visual Tracking (1) Feature Point Tracking and Block Matching
 Feature Point Tracking and Block Matching") Intelligent Control Systems Visual Tracking (1) Feature Point Tracking and Block Matching Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Feature Point Tracking and Block Matching Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
CS 565 Computer Vision. Nazar Khan PUCIT Lectures 15 and 16: Optic Flow
 CS 565 Computer Vision Nazar Khan PUCIT Lectures 15 and 16: Optic Flow Introduction Basic Problem given: image sequence f(x, y, z), where (x, y) specifies the location and z denotes time wanted: displacement
CS 565 Computer Vision Nazar Khan PUCIT Lectures 15 and 16: Optic Flow Introduction Basic Problem given: image sequence f(x, y, z), where (x, y) specifies the location and z denotes time wanted: displacement
Scale Invariant Feature Transform (SIFT) CS 763 Ajit Rajwade
 CS 763 Ajit Rajwade") Scale Invariant Feature Transform (SIFT) CS 763 Ajit Rajwade What is SIFT? It is a technique for detecting salient stable feature points in an image. For ever such point it also provides a set of features
Scale Invariant Feature Transform (SIFT) CS 763 Ajit Rajwade What is SIFT? It is a technique for detecting salient stable feature points in an image. For ever such point it also provides a set of features
Computing F class 13. Multiple View Geometry. Comp Marc Pollefeys
 Computing F class 3 Multiple View Geometr Comp 90-089 Marc Pollefes Multiple View Geometr course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective D Geometr Jan. 4, 6 (no class) Projective
Computing F class 3 Multiple View Geometr Comp 90-089 Marc Pollefes Multiple View Geometr course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective D Geometr Jan. 4, 6 (no class) Projective
Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska. Krzysztof Krawiec IDSS
 Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska. Krzysztof Krawiec IDSS") Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska 1 Krzysztof Krawiec IDSS 2 The importance of visual motion Adds entirely new (temporal) dimension to visual
Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska 1 Krzysztof Krawiec IDSS 2 The importance of visual motion Adds entirely new (temporal) dimension to visual
Robust Model-Free Tracking of Non-Rigid Shape. Abstract
 Robust Model-Free Tracking of Non-Rigid Shape Lorenzo Torresani Stanford University ltorresa@cs.stanford.edu Christoph Bregler New York University chris.bregler@nyu.edu New York University CS TR2003-840
Robust Model-Free Tracking of Non-Rigid Shape Lorenzo Torresani Stanford University ltorresa@cs.stanford.edu Christoph Bregler New York University chris.bregler@nyu.edu New York University CS TR2003-840
OPPA European Social Fund Prague & EU: We invest in your future.
 OPPA European Social Fund Prague & EU: We invest in your future. Patch tracking based on comparing its piels 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine
OPPA European Social Fund Prague & EU: We invest in your future. Patch tracking based on comparing its piels 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine
Computer Vision II Lecture 4
 Course Outline Computer Vision II Lecture 4 Single-Object Tracking Background modeling Template based tracking Color based Tracking Color based tracking Contour based tracking Tracking by online classification
Course Outline Computer Vision II Lecture 4 Single-Object Tracking Background modeling Template based tracking Color based Tracking Color based tracking Contour based tracking Tracking by online classification
CS201: Computer Vision Introduction to Tracking
 CS201: Computer Vision Introduction to Tracking John Magee 18 November 2014 Slides courtesy of: Diane H. Theriault Question of the Day How can we represent and use motion in images? 1 What is Motion? Change
CS201: Computer Vision Introduction to Tracking John Magee 18 November 2014 Slides courtesy of: Diane H. Theriault Question of the Day How can we represent and use motion in images? 1 What is Motion? Change
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
Tutorial of Motion Estimation Based on Horn-Schunk Optical Flow Algorithm in MATLAB
 AU J.T. 1(1): 8-16 (Jul. 011) Tutorial of Motion Estimation Based on Horn-Schun Optical Flow Algorithm in MATLAB Darun Kesrarat 1 and Vorapoj Patanavijit 1 Department of Information Technolog, Facult of
AU J.T. 1(1): 8-16 (Jul. 011) Tutorial of Motion Estimation Based on Horn-Schun Optical Flow Algorithm in MATLAB Darun Kesrarat 1 and Vorapoj Patanavijit 1 Department of Information Technolog, Facult of
Global Flow Estimation. Lecture 9
 Motion Models Image Transformations to relate two images 3D Rigid motion Perspective & Orthographic Transformation Planar Scene Assumption Transformations Translation Rotation Rigid Affine Homography Pseudo
Motion Models Image Transformations to relate two images 3D Rigid motion Perspective & Orthographic Transformation Planar Scene Assumption Transformations Translation Rotation Rigid Affine Homography Pseudo
Fitting a transformation: Feature-based alignment April 30 th, Yong Jae Lee UC Davis
 Fitting a transformation: Feature-based alignment April 3 th, 25 Yong Jae Lee UC Davis Announcements PS2 out toda; due 5/5 Frida at :59 pm Color quantization with k-means Circle detection with the Hough
Fitting a transformation: Feature-based alignment April 3 th, 25 Yong Jae Lee UC Davis Announcements PS2 out toda; due 5/5 Frida at :59 pm Color quantization with k-means Circle detection with the Hough
3D Photography: Epipolar geometry
 3D Photograph: Epipolar geometr Kalin Kolev, Marc Pollefes Spring 203 http://cvg.ethz.ch/teaching/203spring/3dphoto/ Schedule (tentative) Feb 8 Feb 25 Mar 4 Mar Mar 8 Mar 25 Apr Apr 8 Apr 5 Apr 22 Apr
3D Photograph: Epipolar geometr Kalin Kolev, Marc Pollefes Spring 203 http://cvg.ethz.ch/teaching/203spring/3dphoto/ Schedule (tentative) Feb 8 Feb 25 Mar 4 Mar Mar 8 Mar 25 Apr Apr 8 Apr 5 Apr 22 Apr
Multibody Motion Estimation and Segmentation from Multiple Central Panoramic Views
 Multibod Motion Estimation and Segmentation from Multiple Central Panoramic Views Omid Shakernia René Vidal Shankar Sastr Department of Electrical Engineering & Computer Sciences Universit of California
Multibod Motion Estimation and Segmentation from Multiple Central Panoramic Views Omid Shakernia René Vidal Shankar Sastr Department of Electrical Engineering & Computer Sciences Universit of California
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Global Flow Estimation. Lecture 9
 Global Flow Estimation Lecture 9 Global Motion Estimate motion using all pixels in the image. Parametric flow gives an equation, which describes optical flow for each pixel. Affine Projective Global motion
Global Flow Estimation Lecture 9 Global Motion Estimate motion using all pixels in the image. Parametric flow gives an equation, which describes optical flow for each pixel. Affine Projective Global motion
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration
 MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
Optic Flow and Basics Towards Horn-Schunck 1
 Optic Flow and Basics Towards Horn-Schunck 1 Lecture 7 See Section 4.1 and Beginning of 4.2 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information.
Optic Flow and Basics Towards Horn-Schunck 1 Lecture 7 See Section 4.1 and Beginning of 4.2 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information.
Adaptive Multi-Stage 2D Image Motion Field Estimation
 Adaptive Multi-Stage 2D Image Motion Field Estimation Ulrich Neumann and Suya You Computer Science Department Integrated Media Systems Center University of Southern California, CA 90089-0781 ABSRAC his
Adaptive Multi-Stage 2D Image Motion Field Estimation Ulrich Neumann and Suya You Computer Science Department Integrated Media Systems Center University of Southern California, CA 90089-0781 ABSRAC his
Image warping/morphing
 Image warping/morphing Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/20 with slides b Richard Szeliski, Steve Seitz, Tom Funkhouser and Aleei Efros Image warping Image formation B A Sampling
Image warping/morphing Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/20 with slides b Richard Szeliski, Steve Seitz, Tom Funkhouser and Aleei Efros Image warping Image formation B A Sampling
Computational Optical Imaging - Optique Numerique. -- Single and Multiple View Geometry, Stereo matching --
 Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Final Exam Study Guide CSE/EE 486 Fall 2007
 Final Exam Study Guide CSE/EE 486 Fall 2007 Lecture 2 Intensity Sufaces and Gradients Image visualized as surface. Terrain concepts. Gradient of functions in 1D and 2D Numerical derivatives. Taylor series.
Final Exam Study Guide CSE/EE 486 Fall 2007 Lecture 2 Intensity Sufaces and Gradients Image visualized as surface. Terrain concepts. Gradient of functions in 1D and 2D Numerical derivatives. Taylor series.
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image Warping. Computational Photography Derek Hoiem, University of Illinois 09/28/17. Photo by Sean Carroll
 Image Warping 9/28/7 Man slides from Alosha Efros + Steve Seitz Computational Photograph Derek Hoiem, Universit of Illinois Photo b Sean Carroll Reminder: Proj 2 due monda Much more difficult than project
Image Warping 9/28/7 Man slides from Alosha Efros + Steve Seitz Computational Photograph Derek Hoiem, Universit of Illinois Photo b Sean Carroll Reminder: Proj 2 due monda Much more difficult than project
Warping, Morphing and Mosaics
 Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
Visual Tracking. Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania.
 Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania 1 What is visual tracking? estimation of the target location over time 2 applications Six main areas:
Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania 1 What is visual tracking? estimation of the target location over time 2 applications Six main areas:
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
The Template Update Problem
 The Template Update Problem Iain Matthews, Takahiro Ishikawa, and Simon Baker The Robotics Institute Carnegie Mellon University Abstract Template tracking dates back to the 1981 Lucas-Kanade algorithm.
The Template Update Problem Iain Matthews, Takahiro Ishikawa, and Simon Baker The Robotics Institute Carnegie Mellon University Abstract Template tracking dates back to the 1981 Lucas-Kanade algorithm.
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Visual Tracking. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Visual Tracking Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 11 giugno 2015 What is visual tracking? estimation
Visual Tracking Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 11 giugno 2015 What is visual tracking? estimation
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Determining the 2d transformation that brings one image into alignment (registers it) with another. And
 with another. And") Last two lectures: Representing an image as a weighted combination of other images. Toda: A different kind of coordinate sstem change. Solving the biggest problem in using eigenfaces? Toda Recognition
Last two lectures: Representing an image as a weighted combination of other images. Toda: A different kind of coordinate sstem change. Solving the biggest problem in using eigenfaces? Toda Recognition
Displacement estimation
 Displacement estimation Displacement estimation by block matching" l Search strategies" l Subpixel estimation" Gradient-based displacement estimation ( optical flow )" l Lukas-Kanade" l Multi-scale coarse-to-fine"
Displacement estimation Displacement estimation by block matching" l Search strategies" l Subpixel estimation" Gradient-based displacement estimation ( optical flow )" l Lukas-Kanade" l Multi-scale coarse-to-fine"
Stereo Matching! Christian Unger 1,2, Nassir Navab 1!! Computer Aided Medical Procedures (CAMP), Technische Universität München, Germany!!
, Technische Universität München, Germany!!") Stereo Matching Christian Unger 12 Nassir Navab 1 1 Computer Aided Medical Procedures CAMP) Technische Universität München German 2 BMW Group München German Hardware Architectures. Microprocessors Pros:
Stereo Matching Christian Unger 12 Nassir Navab 1 1 Computer Aided Medical Procedures CAMP) Technische Universität München German 2 BMW Group München German Hardware Architectures. Microprocessors Pros:
Horn-Schunck and Lucas Kanade 1
 Horn-Schunck and Lucas Kanade 1 Lecture 8 See Sections 4.2 and 4.3 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 40 Where We
Horn-Schunck and Lucas Kanade 1 Lecture 8 See Sections 4.2 and 4.3 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 40 Where We
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature