Applications of Image Motion Estimation I
|
|
|
- Estella Sanders
- 6 years ago
- Views:
Transcription


1 Applications of Image Motion Estimation I Mosaicing Princeton University COS 429 Lecture Oct. 16, 2007 Harpreet S. Sawhney hsawhney@sarnoff.com
2 Visual Motion Estimation : Recapitulation
3 Plan Explain optical flow equations Show inclusion of multiple constraints for solution Another way to solve is to use global parametric models
4 Brightness Constancy Assumption I 1 (p ) p u(p) I 2 (p) p Model image transformation as : I ( p ) = I1( p - u( p )) = I1( p 2 ) Brightness Constancy Reference Coordinate Optical Flow Corresponding Coordinate
5 How do we solve for the flow? I ( p ) = I1( p - u( p )) = I1( p 2 Use Taylor Series Expansion ) T I2 ( p ) = I1( p ) - I 1 u( p ) + O(2 ) Image Gradient Convert constraint into an objective function E T 2 SSD (u ) = ( I1 u( p ) + δi( p )) p R I ( p ) I1( 2 - p )
6 Optical Flow Constraint Equation At a Single Pixel T I2 ( p ) = I1( p ) - I 1 u( p ) + O(2 ) Leads to I T 1 u( p ) + δi( p ) 0 x y Ix u + Iyu + It = 0 - It I Normal Flow
7 Multiple Constraints in a Region E T 2 SSD (u ) = ( I1 u( p ) + I( p )) p R δ X
8 E Solution T 2 SSD (u ) = ( I1 u( p ) + I( p )) p R δ p R E SSD (u ) = 0 u T I ( I u( p ) + δi( p )) = 1 0 p R [ I I - δ T 1 ]u = I I p R Au = b
9 Solution Au = b ] I I I I I I [ A R 2 y R y x R y x R 2 x = δ δ = ] I I I I [ b R y R x - - Observations: A is a sum of outer products of the gradient vector A is positive semi-definite A is non-singular if two or more linearly independent gradients are available Singular value decomposition of A can be used to compute a solution for u
10 Another way to provide unique solution Global Parametric Models E T 2 SSD (u ) = ( I1 u( p ) + δi( p )) p R u(p) is described using an affine transformation valid within the whole region R u (p) = x [ 0 h11 h12 u (p) = Ηp + t H = [ ] h21 h22 y 0 0 x 0 y E SSD (u ) = 0 u ][h 1 E T 11 h12 h21 h22 t1 t2] T 2 SSD (u) = ( I1B(p) β + δi(p)) p R T T B(p) I I B(p)] β = p R p R t1 t = [ ] t2 u(p) = Β(p) β T [ - B(p) IδI 1 A β = b
11 Affine Motion Good approximation for : Small motions Small Camera rotations Narrow field of view camera When depth variation in the scene is small compared to the average depth and small motion Affine camera images a planar scene
12 Affine Motion X X Affine camera: p = s[ ] p s [ ] Y = Y 3D Motion: P = RP + T p = r s [ r T 1 T 2 P P + + T T x y ] = s R T 22 p + r s [ r ]Z + s T xy A 3D Plane: Z 1 = αx + βy + η = [ α β] p s + η p = s R r 1 T 13 22p + s [ ] [ α β]p + η + s Txy r23 s u (p) = p - p = Hp + t
13 Two More Ingredients for Success Iterative solution through image warping Linearization of the BCE is valid only when u(p) is small Warping brings the second image closer to the reference Coarse-to-fine motion estimation for estimating a wider range of image displacements Coarse levels provide a convex function with unique local minima Finer levels track the minima for a globally optimum solution
) I (k) I1(p - u (p)) I w 1 (p) (p - w 2 1 1 δ u(p)) Source Image : Filled Target Image : Empty p - u (k)")
14 Image Warping I (p) = I1(p 2 - u(p)) (k) Express u(p) as: u(p) = u (p) + δu(p) I (p) (k) = I (p - u (p) - δu(p)) I (k) I1(p - u (p)) I w 1 (p) (p - w δ u(p)) Source Image : Filled Target Image : Empty p - u (k) (p) p
15 Coarse-to-fine Image Alignment : A Primer d(p) - Warper I (p) I (p+ u(p; Θ)) min ( Θ 1 2 ) p { R, T, d(p) } { H, e, k(p) } { dx(p), dy(p) } 2

16 Mosaics In Art combine individual chips to create a big picture... Part of the Byzantine mosaic floor that has been preserved in the Church of Multiplication in Tabkha (near the Sea of Galilee).
17 Image Mosaics Chips are images. May or may not be captured from known locations of the camera.

18 OUTPUT IS A SEAMLESS MOSAIC

19 VIDEOBRUSH IN ACTION
20 WHAT MAKES MOSAICING POSSIBBLE the simplest geometry... Single Center of Projection for all Images Projection Surfaces COP Images
21 Planar Mosaic Construction Align Pairwise: 1:2, 2:3, 3:4,... Select a Reference Frame Align all Images to the Reference Frame Combine into a Single Mosaic Virtual Camera (Pan) Image Surface - Plane Projection - Perspective
22 Key Problem What Is the Mapping From Image Rays to the Mosaic Coordinates? COP P ',P Images Rotations/Homographies Plane Projective Transformations K P ' = RP ' ' pc Rp c p p ' ' p ' RKp K H ' 1 RKp p




23 IMAGE ALIGNMENT IS A BASIC REQUIREMENT


24 PYRAMID BASED COARSE-TO-FINE ALIGNMENT a core technology... Coarse levels reduce search. Models of image motion reduce modeling complexity. Image warping allows model estimation without discrete feature extraction. Model parameters are estimated using iterative nonlinear optimization. Coarse level parameters guide optimization at finer levels.
25 ITERATIVE SOLUTION OF THE ALIGNMENT MODEL Assume that at the kth iteration, I (p ) = I (p ) = I (Ρ w w ( k ) p w ) ( k ) Ρ, is available model the residual transformation between the coordinate systems, p w [I + D]p w T w w w w w p I (p (p;d)) I (p (p;0)) + I D= 0 D w p D D= 0 p w (1+ d11)x + d12y + d d31x + d32y + 1 = d21x + (1+ d22 )y + d d31x + d32y D = I(p) w p D x = 0 y w p and p, as: x xy xy y D= x 0 y Ρ (k+ 1) Ρ (k) [I + D]
26 ITERATIVE REWEIGHTED SUM OF SQUARES Given a solution l i ρ(r & i) r i (m) Θ r θ i k ri θ at the mth iteration, find δθ by solving : l θ l = ρ(r & i r i ) r i r θ i k k w i wi acts as a soft outlier rejecter : ρ& (r) r SS = 1 σ 2 ρ& (r) r GM = 2 2σ 2 (σ + r 2 ) 2
27 PROGRESSIVE MODEL COMPLEXITY combining real-time capture with accurate alignment... Provide user feedback by coarsely aligning incoming frames with a low order model robust matching that covers a wide search range achieve about 6-8 frames a sec. on a Pentium 200 Use the coarse alignment parameters to seed the fine alignment increase model complexity from similarity, to affine, to projective parameters coarse-to-fine alignment for wide range of motions and managing computational complexity
")
 d")
 warp Iˆ (")
28 COARSE-TO-FINE ALIGNMENT I(t) estimate global shift d r (t) d r (t) delay I (t 1) warp Iˆ ( t 1)

29 VIDEO MOSAIC EXAMPLE Princeton Chapel Video Sequence 54 frames

30 UNBLENDED CHAPEL MOSAIC
31 Image Merging withlaplacian Pyramids Image 1 Image Combined Seamless Image

32 VORONOI TESSELATIONS W/ L1 NORM
33 BLENDED CHAPEL MOSAIC
34 1D vs. 2D SCANNING 1D : The topology of frames is a ribbon or a string. Frames overlap only with their temporal neighbors. (A 300x332 mosaic captured by mosaicing a 1D sequence of 6 frames) 2D : The topology of frames is a 2D graph Frames overlap with neighbors on many sides

35 1D vs. 2D SCANNING The 1D scan scaled by 2 to 600x692 A 2D scanned mosaic of size 600x692
36 CHOICE OF 1D/2D MANIFOLD Plane Cylinder Cone Sphere Arbitrary
37
38

39 THE DESMILEY ALGORITHM Compute 2D rotation and translation between successive frames Compute L by intersecting central lines of each frame Fill each pixel [l y] in the rectified planar mosaic by mapping it to the appropriate video frame

40
41 2D MOSAICING THROUGH TOPOLOGY INFERENCE & LOCAL TO GLOBAL ALIGNMENT automatic solution to two key problems... Inference of 2D neighborhood relations (topology) between frames Input video just provides a temporal 1D ordering of frames Need to infer 2D neighborhood relations so that local constraints may be setup between pairs of frames Globally consistent alignment and mosaic creation Choose appropriate alignment model Local constraints incorporated in a global optimization
 Like an MDL measure : Create a compact appearance while being geometrically consistent")
42 PROBLEM FORMULATION Given an arbitrary scan of a scene Create a globally aligned mosaic by minimizing min { P i } E = ij G E ij + E i i 2 + σ (Area of the mosaic) Like an MDL measure : Create a compact appearance while being geometrically consistent
43 ERROR MEASURE min { P i } E = ij G E ij + E i i 2 + σ (Area of the mosaic) where Pi : Reference - to - image mapping, ui = PX i E : Any measure of alignment error between neighbors i G E ij i : Graph that represents the neighborhood relations : Frame to reference error term to allow for a priori criterion like least distortion transformation and j
44 ALGORITHMIC APPROACH From a 1D ordered collection of frames to A Globally consistent set of alignment parameters 1. Graph Topology Determination Iterate through Given: pose of all frames Establish neighborhood relations min(area of Mosaic) Graph G 2. Local Pairwise Alignment Given: G Quality measure validates hypothesized arcs Provides pairwise constraints 3. Globally Consistent Alignment Given: pairwise constraints Compute reference-to-frame pose parameters min Eij
45 * Initialize using low order frame-to-frame mosaic algorithm on a plane GRAPH TOPOLOGY DETERMINATION Given: Current estimate of pose* Lay out each frame on the 2D manifold (plane, sphere, etc.) Hypothesize new neighbors based on proximity predictability of relative pose non redundancy w.r.t. current G d ij D ij Specifically, try arc (i,j) if Normalized Euclidean dist d ij << Path distance D ij Validate hypothesis by local registration Add arc to G if good quality registration
46 LOCAL COARSE & FINE ALIGNMENT Given: a frame pair to be registered Coarse alignment Low order parametric model e.g. shift, or 2D R & T Majority consensus among subimage estimates Fine alignment [Bergen, ECCV 92] Coarse to fine over Laplacian pyramid Progressive model complexity, up to projective Incrementally adjust motion parameters to minimize SSD Quality measure Normalized correlation helps reject invalid registrations
47 GLOBALLY CONSISTENT ALIGNMENT Given: arcs ij in graph G of neighbors The local alignment parameters, Qij, help establish feature correspondence between i and j If uil and ujl are corresponding points in frames i,j, then ui uj E ij = 1 1 Pi ( uil) Pj ( ujl ) 2 Eij Incrementally adjust poses P i to minimize min { P i } E = ij G E ij + E i i
48 SPECIFIC EXAMPLES : 1. PLANAR MOSAICS Mosaic to frame transformation model: u P i X Local Registration Coarse 2D translation & fine 2D projective alignment Topology : Neighborhood graph defined over a plane Initial graph topology computed with the 2D T estimates Iterative refinement using arcs based on projective alignment Global Alignment E ij = k 2 ( Aiuik ) ( A jujk ) Pair Wise Alignment Error Ei = 2 k= 1 ( ( A α ) ( A i k β )) ( α j k k 2 β ) k Minimum Distortion Error

49 PLANAR TOPOLOGY EVOLUTION Whiteboard Video Sequence 75 frames

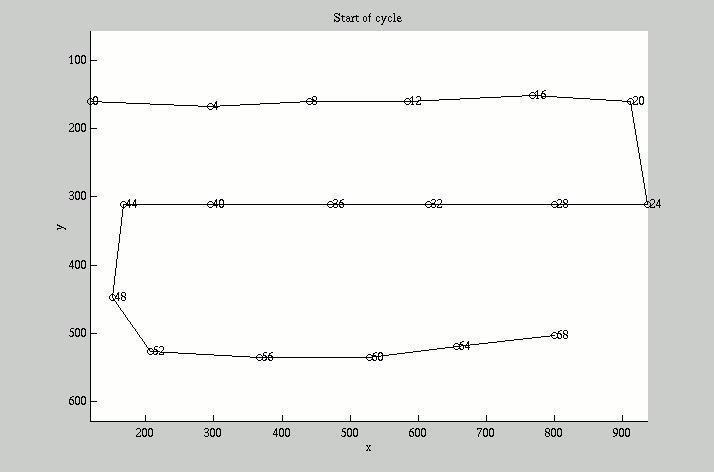
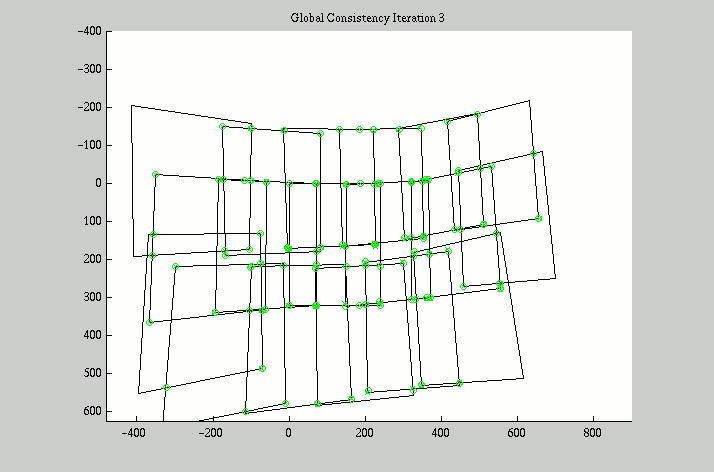
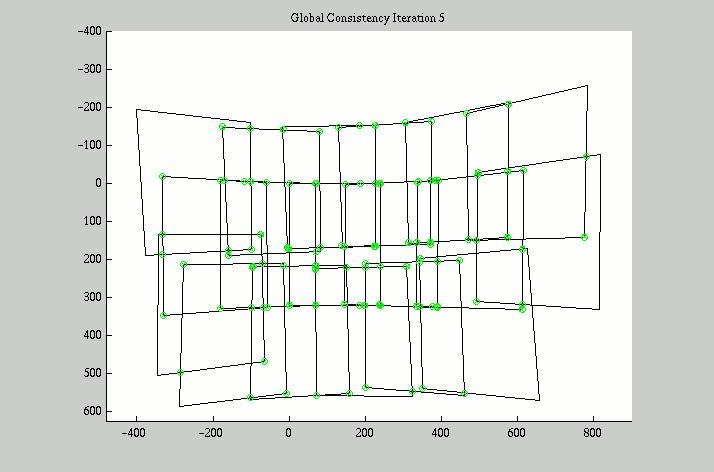
50 PLANAR TOPOLOGY EVOLUTION

51 FINAL MOSAIC
52 SPECIFIC EXAMPLES : 2. SPHERICAL MOSAICS Frame to mosaic transformation model: u FR T i X Local Registration Coarse 2D translation & fine 2D projective alignment Parameter Initialization Compute F and R s from the 2D projective matrices Topology : Initial graph topology computed with the 2D R & T estimates on a plane Subsequently the topology defined on a sphere Iterative refinement using arcs based on alignment with F and R s Global Alignment E ij = k 1 1 R if uik R jf ujk 2

53 SPHERICAL MOSAICS Sarnoff Library Video Captures almost the complete sphere with 380 frames

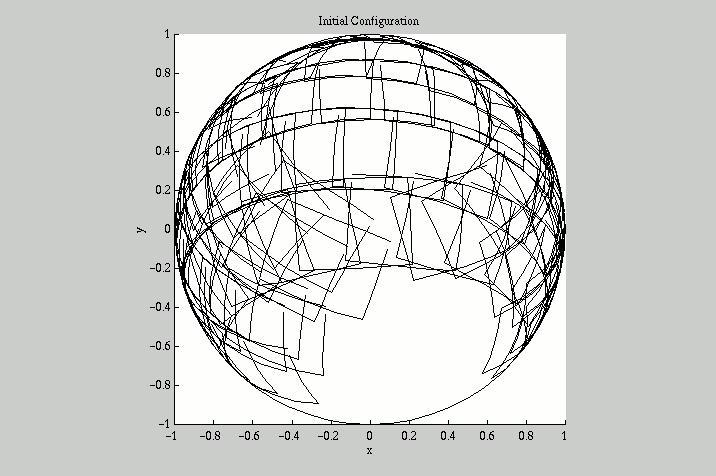
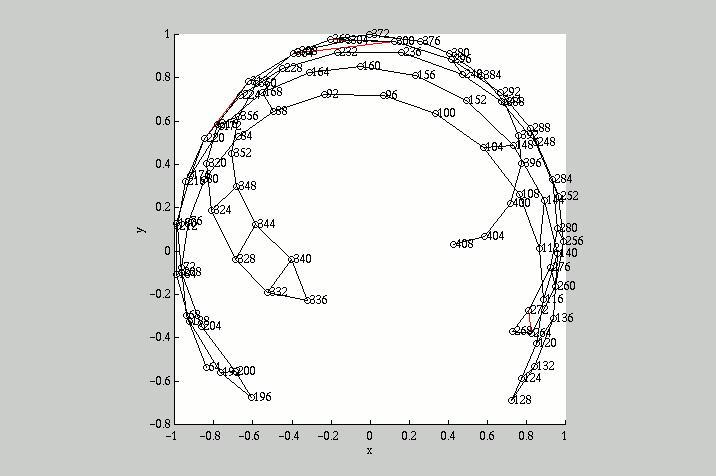
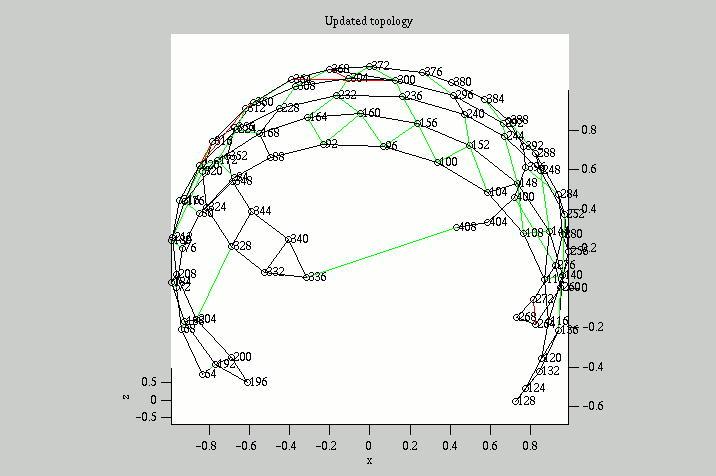
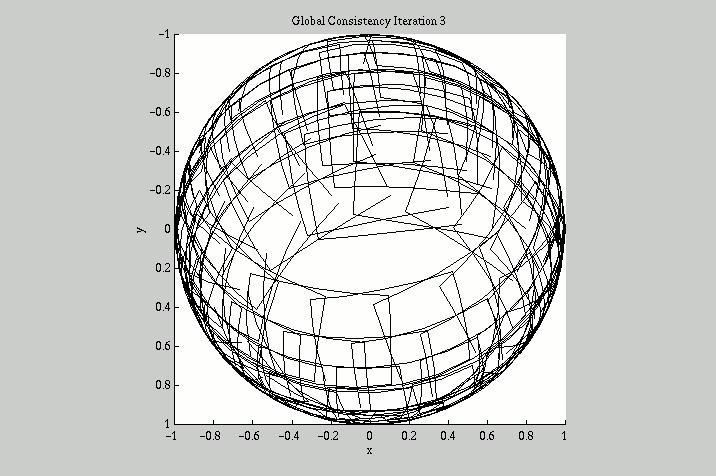
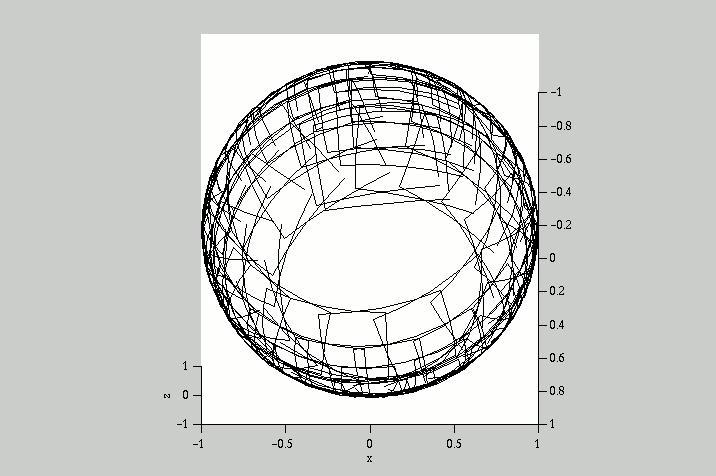
54 SPHERICAL TOPOLOGY EVOLUTION

55 SPHERICAL MOSAIC Sarnoff Library

56 SPHERICAL MOSAIC Sarnoff Library


57 NEW SYNTHESIZED VIEWS

58 FINAL MOSAIC Princeton University Courtyard
59 Mosaicing from Strips Image 1 Image 2 Image 3 Image 4 Image 5 Mosaic from center strips

60 Problem: Forward Translation
61 General Camera Motion Strip Perpendicular to Optical Flow Cut/Paste Strip (warp to make Optical Flow parallel) Parallel Flow: Straight Strip Radial Flow (FOE): Circular Strip
62 Mosaic Construction Mosaic
63 Simple Cases ax + M = 0 0 ) ( = + + M y x b = 0 a v u = by bx v u Horizontal Translation Zoom (M determines displacement) (M determines radius)
64 Manifold for Forward Motion Stationary (but rotating) Camera Viewing Sphere Translating Camera Sphere carves a Pipe in space
65 Pipe Projection One Image Sequence
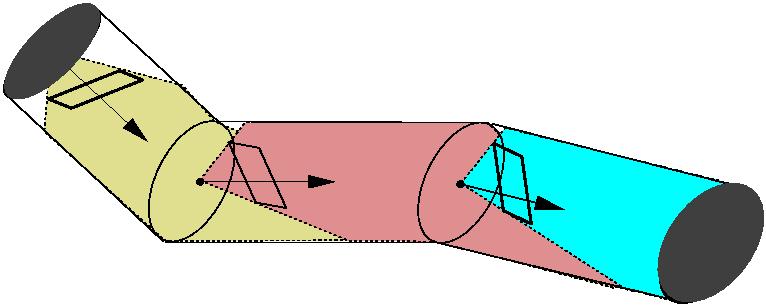
66 Concatenation of Pipes

67 Forward Motion Mosaicing




68 Example: Forward Motion

69 Side View of Mosaic


70 Forward Mosaicing II

71 Mosaic Construction

72 OmniStereo: Stereo in Full 360 o Two Panoramas: One for Each Eye Each panorama can be mapped on a cylinder
73 Paradigm: A Rotating Stereo Pair of Slit Cameras Rays are tangent to viewing circle (Gives 360 o stereo) Image planes are radial (Makes mosaicing difficult)
74 Panoramic Projections of Slit Cameras Image Surface Regular panorama (single viewpoint): Projection rays orthogonal to cylinder Directional Viewpoints Left Eye panorama (viewing circle) Projection rays tilted right Right Eye panorama (viewing circle) Projection rays tilted left
75 Slit Camera Model Center Strip: Rays perpendicular to image plane Side Strip: Rays tilted from image plane Pinhole Aperture Vertical Slit (a) (b) Center Strip Image Plane (c) Side Strip
76 Stereo Panorama from Strips Left-eye-Panorama from right strips Image 1 Image 2 Image 3 Image 4 Image 5 Right-eye-Panorama from left strips

77 MultiView Panoramas Right-Eye Panorama Left-Eye Panorama 360 ο 180 ο 0 ο Regular Panorama

78 Stereo Panorama from Video Stereo viewing with Red/Blue Glasses


79 Viewing Panoramic Stereo Printed Cylindrical Surfaces Print panorama on a cylinder No computation needed!!!
80
Multiple Model Estimation : The EM Algorithm & Applications
 Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Nov. 13, 2007 Harpreet S. Sawhney hsawhney@sarnoff.com Recapitulation Problem of motion estimation Parametric
Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Nov. 13, 2007 Harpreet S. Sawhney hsawhney@sarnoff.com Recapitulation Problem of motion estimation Parametric
Multiple Model Estimation : The EM Algorithm & Applications
 Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Dec. 4, 2008 Harpreet S. Sawhney hsawhney@sarnoff.com Plan IBR / Rendering applications of motion / pose
Multiple Model Estimation : The EM Algorithm & Applications Princeton University COS 429 Lecture Dec. 4, 2008 Harpreet S. Sawhney hsawhney@sarnoff.com Plan IBR / Rendering applications of motion / pose
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Video Mosaics for Virtual Environments, R. Szeliski. Review by: Christopher Rasmussen
 Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Announcements. Mosaics. Image Mosaics. How to do it? Basic Procedure Take a sequence of images from the same position =
 Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Announcements. Mosaics. How to do it? Image Mosaics
 Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Image warping and stitching
 Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
Image stitching. Announcements. Outline. Image stitching
 Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Today s lecture. Image Alignment and Stitching. Readings. Motion models
 Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Image Stitching. Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi
 Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Comparison between Motion Analysis and Stereo
 MOTION ESTIMATION The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Octavia Camps (Northeastern); including their own slides. Comparison between Motion Analysis
MOTION ESTIMATION The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Octavia Camps (Northeastern); including their own slides. Comparison between Motion Analysis
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Lecture 16: Computer Vision
 CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Global Flow Estimation. Lecture 9
 Motion Models Image Transformations to relate two images 3D Rigid motion Perspective & Orthographic Transformation Planar Scene Assumption Transformations Translation Rotation Rigid Affine Homography Pseudo
Motion Models Image Transformations to relate two images 3D Rigid motion Perspective & Orthographic Transformation Planar Scene Assumption Transformations Translation Rotation Rigid Affine Homography Pseudo
CS664 Lecture #18: Motion
 CS664 Lecture #18: Motion Announcements Most paper choices were fine Please be sure to email me for approval, if you haven t already This is intended to help you, especially with the final project Use
CS664 Lecture #18: Motion Announcements Most paper choices were fine Please be sure to email me for approval, if you haven t already This is intended to help you, especially with the final project Use
Optical Flow Estimation
 Optical Flow Estimation Goal: Introduction to image motion and 2D optical flow estimation. Motivation: Motion is a rich source of information about the world: segmentation surface structure from parallax
Optical Flow Estimation Goal: Introduction to image motion and 2D optical flow estimation. Motivation: Motion is a rich source of information about the world: segmentation surface structure from parallax
Targil 10 : Why Mosaic? Why is this a challenge? Exposure differences Scene illumination Miss-registration Moving objects
 Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 5 x 35 Targil : Panoramas - Stitching and Blending Some slides from Alexei Efros 2 Slide from Brown & Lowe Why Mosaic? Are you getting
Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 5 x 35 Targil : Panoramas - Stitching and Blending Some slides from Alexei Efros 2 Slide from Brown & Lowe Why Mosaic? Are you getting
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Image Warping and Mosacing
 Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
Optical flow and tracking
 EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Q-warping: Direct Computation of Quadratic Reference Surfaces
 Q-warping: Direct Computation of Quadratic Reference Surfaces Y. Wexler A. Shashua wexler@cs.umd.edu Center for Automation Research University of Maryland College Park, MD 20742-3275 shashua@cs.huji.ac.il
Q-warping: Direct Computation of Quadratic Reference Surfaces Y. Wexler A. Shashua wexler@cs.umd.edu Center for Automation Research University of Maryland College Park, MD 20742-3275 shashua@cs.huji.ac.il
Motion. 1 Introduction. 2 Optical Flow. Sohaib A Khan. 2.1 Brightness Constancy Equation
 Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]
![Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]](/thumbs/80/81283374.jpg "Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]") Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Massachusetts Institute of Technology. Department of Computer Science and Electrical Engineering /6.866 Machine Vision Quiz I
 Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision Quiz I Handed out: 2004 Oct. 21st Due on: 2003 Oct. 28th Problem 1: Uniform reflecting
Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision Quiz I Handed out: 2004 Oct. 21st Due on: 2003 Oct. 28th Problem 1: Uniform reflecting
Using Subspace Constraints to Improve Feature Tracking Presented by Bryan Poling. Based on work by Bryan Poling, Gilad Lerman, and Arthur Szlam
 Presented by Based on work by, Gilad Lerman, and Arthur Szlam What is Tracking? Broad Definition Tracking, or Object tracking, is a general term for following some thing through multiple frames of a video
Presented by Based on work by, Gilad Lerman, and Arthur Szlam What is Tracking? Broad Definition Tracking, or Object tracking, is a general term for following some thing through multiple frames of a video
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India
 A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
Robert Collins CSE598G. Intro to Template Matching and the Lucas-Kanade Method
 Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Stereo imaging ideal geometry
 Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Spatial track: motion modeling
 Spatial track: motion modeling Virginio Cantoni Computer Vision and Multimedia Lab Università di Pavia Via A. Ferrata 1, 27100 Pavia virginio.cantoni@unipv.it http://vision.unipv.it/va 1 Comparison between
Spatial track: motion modeling Virginio Cantoni Computer Vision and Multimedia Lab Università di Pavia Via A. Ferrata 1, 27100 Pavia virginio.cantoni@unipv.it http://vision.unipv.it/va 1 Comparison between
Towards a visual perception system for LNG pipe inspection
 Towards a visual perception system for LNG pipe inspection LPV Project Team: Brett Browning (PI), Peter Rander (co PI), Peter Hansen Hatem Alismail, Mohamed Mustafa, Joey Gannon Qri8 Lab A Brief Overview
Towards a visual perception system for LNG pipe inspection LPV Project Team: Brett Browning (PI), Peter Rander (co PI), Peter Hansen Hatem Alismail, Mohamed Mustafa, Joey Gannon Qri8 Lab A Brief Overview
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Omni Stereo Vision of Cooperative Mobile Robots
 Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Real-Time Stereo Mosaicing using Feature Tracking
 2011 IEEE International Symposium on Multimedia Real- Stereo Mosaicing using Feature Tracking Marc Vivet Computer Science Department Universitat Autònoma de Barcelona Barcelona, Spain Shmuel Peleg School
2011 IEEE International Symposium on Multimedia Real- Stereo Mosaicing using Feature Tracking Marc Vivet Computer Science Department Universitat Autònoma de Barcelona Barcelona, Spain Shmuel Peleg School
Visual Tracking (1) Feature Point Tracking and Block Matching
 Feature Point Tracking and Block Matching") Intelligent Control Systems Visual Tracking (1) Feature Point Tracking and Block Matching Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Feature Point Tracking and Block Matching Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
360 Full View Spherical Mosaic
 360 Full View Spherical Mosaic Huang Wenfan Huang Yehui Rong Nan U017865B U017844X U018274R Objective Full spherical mosaic 360 x 180. All images are taken with camera mounted on a tripod. Registration
360 Full View Spherical Mosaic Huang Wenfan Huang Yehui Rong Nan U017865B U017844X U018274R Objective Full spherical mosaic 360 x 180. All images are taken with camera mounted on a tripod. Registration
Structure from Motion. Prof. Marco Marcon
 Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Lecture 20: Tracking. Tuesday, Nov 27
 Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
Multi-View Omni-Directional Imaging
 Multi-View Omni-Directional Imaging Tuesday, December 19, 2000 Moshe Ben-Ezra, Shmuel Peleg Abstract This paper describes a novel camera design or the creation o multiple panoramic images, such that each
Multi-View Omni-Directional Imaging Tuesday, December 19, 2000 Moshe Ben-Ezra, Shmuel Peleg Abstract This paper describes a novel camera design or the creation o multiple panoramic images, such that each
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Representing Moving Images with Layers. J. Y. Wang and E. H. Adelson MIT Media Lab
 Representing Moving Images with Layers J. Y. Wang and E. H. Adelson MIT Media Lab Goal Represent moving images with sets of overlapping layers Layers are ordered in depth and occlude each other Velocity
Representing Moving Images with Layers J. Y. Wang and E. H. Adelson MIT Media Lab Goal Represent moving images with sets of overlapping layers Layers are ordered in depth and occlude each other Velocity
More Mosaic Madness. CS194: Image Manipulation & Computational Photography. Steve Seitz and Rick Szeliski. Jeffrey Martin (jeffrey-martin.
 More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Marcel Worring Intelligent Sensory Information Systems
 Marcel Worring worring@science.uva.nl Intelligent Sensory Information Systems University of Amsterdam Information and Communication Technology archives of documentaries, film, or training material, video
Marcel Worring worring@science.uva.nl Intelligent Sensory Information Systems University of Amsterdam Information and Communication Technology archives of documentaries, film, or training material, video
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Local Image Registration: An Adaptive Filtering Framework
 Local Image Registration: An Adaptive Filtering Framework Gulcin Caner a,a.murattekalp a,b, Gaurav Sharma a and Wendi Heinzelman a a Electrical and Computer Engineering Dept.,University of Rochester, Rochester,
Local Image Registration: An Adaptive Filtering Framework Gulcin Caner a,a.murattekalp a,b, Gaurav Sharma a and Wendi Heinzelman a a Electrical and Computer Engineering Dept.,University of Rochester, Rochester,
Image-based Modeling and Rendering: 8. Image Transformation and Panorama
 Image-based Modeling and Rendering: 8. Image Transformation and Panorama I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung Univ, Taiwan Outline Image transformation How to represent the
Image-based Modeling and Rendering: 8. Image Transformation and Panorama I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung Univ, Taiwan Outline Image transformation How to represent the
Computer Science 426 Midterm 3/11/04, 1:30PM-2:50PM
 NAME: Login name: Computer Science 46 Midterm 3//4, :3PM-:5PM This test is 5 questions, of equal weight. Do all of your work on these pages (use the back for scratch space), giving the answer in the space
NAME: Login name: Computer Science 46 Midterm 3//4, :3PM-:5PM This test is 5 questions, of equal weight. Do all of your work on these pages (use the back for scratch space), giving the answer in the space
ROBUST LINE-BASED CALIBRATION OF LENS DISTORTION FROM A SINGLE VIEW
 ROBUST LINE-BASED CALIBRATION OF LENS DISTORTION FROM A SINGLE VIEW Thorsten Thormählen, Hellward Broszio, Ingolf Wassermann thormae@tnt.uni-hannover.de University of Hannover, Information Technology Laboratory,
ROBUST LINE-BASED CALIBRATION OF LENS DISTORTION FROM A SINGLE VIEW Thorsten Thormählen, Hellward Broszio, Ingolf Wassermann thormae@tnt.uni-hannover.de University of Hannover, Information Technology Laboratory,
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Improved Video Mosaic Construction by Accumulated Alignment Error Distribution
 Improved Video Mosaic Construction by Accumulated Alignment Error Distribution Manuel Guillén González, Phil Holifield and Martin Varley Department of Engineering and Product Design University of Central
Improved Video Mosaic Construction by Accumulated Alignment Error Distribution Manuel Guillén González, Phil Holifield and Martin Varley Department of Engineering and Product Design University of Central
Optic Flow and Basics Towards Horn-Schunck 1
 Optic Flow and Basics Towards Horn-Schunck 1 Lecture 7 See Section 4.1 and Beginning of 4.2 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information.
Optic Flow and Basics Towards Horn-Schunck 1 Lecture 7 See Section 4.1 and Beginning of 4.2 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information.
Computer Vision for HCI. Motion. Motion
 Computer Vision for HCI Motion Motion Changing scene may be observed in a sequence of images Changing pixels in image sequence provide important features for object detection and activity recognition 2
Computer Vision for HCI Motion Motion Changing scene may be observed in a sequence of images Changing pixels in image sequence provide important features for object detection and activity recognition 2
Final Exam Study Guide CSE/EE 486 Fall 2007
 Final Exam Study Guide CSE/EE 486 Fall 2007 Lecture 2 Intensity Sufaces and Gradients Image visualized as surface. Terrain concepts. Gradient of functions in 1D and 2D Numerical derivatives. Taylor series.
Final Exam Study Guide CSE/EE 486 Fall 2007 Lecture 2 Intensity Sufaces and Gradients Image visualized as surface. Terrain concepts. Gradient of functions in 1D and 2D Numerical derivatives. Taylor series.
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Global Flow Estimation. Lecture 9
 Global Flow Estimation Lecture 9 Global Motion Estimate motion using all pixels in the image. Parametric flow gives an equation, which describes optical flow for each pixel. Affine Projective Global motion
Global Flow Estimation Lecture 9 Global Motion Estimate motion using all pixels in the image. Parametric flow gives an equation, which describes optical flow for each pixel. Affine Projective Global motion
Robust Geometry Estimation from two Images
 Robust Geometry Estimation from two Images Carsten Rother 09/12/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation Process 09/12/2016 2 Appearance-based
Robust Geometry Estimation from two Images Carsten Rother 09/12/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation Process 09/12/2016 2 Appearance-based
Texture. Texture Mapping. Texture Mapping. CS 475 / CS 675 Computer Graphics. Lecture 11 : Texture
 Texture CS 475 / CS 675 Computer Graphics Add surface detail Paste a photograph over a surface to provide detail. Texture can change surface colour or modulate surface colour. Lecture 11 : Texture http://en.wikipedia.org/wiki/uv_mapping
Texture CS 475 / CS 675 Computer Graphics Add surface detail Paste a photograph over a surface to provide detail. Texture can change surface colour or modulate surface colour. Lecture 11 : Texture http://en.wikipedia.org/wiki/uv_mapping
CS 475 / CS 675 Computer Graphics. Lecture 11 : Texture
 CS 475 / CS 675 Computer Graphics Lecture 11 : Texture Texture Add surface detail Paste a photograph over a surface to provide detail. Texture can change surface colour or modulate surface colour. http://en.wikipedia.org/wiki/uv_mapping
CS 475 / CS 675 Computer Graphics Lecture 11 : Texture Texture Add surface detail Paste a photograph over a surface to provide detail. Texture can change surface colour or modulate surface colour. http://en.wikipedia.org/wiki/uv_mapping
An introduction to 3D image reconstruction and understanding concepts and ideas
 Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Image-Based Modeling and Rendering. Image-Based Modeling and Rendering. Final projects IBMR. What we have learnt so far. What IBMR is about
 Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Lecture 8 Fitting and Matching
 Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation