Chapter3. Problem-Solving Agents. Problem Solving Agents (cont.) Well-defined Problems and Solutions. Example Problems.
|
|
|
- Aubrie Higgins
- 6 years ago
- Views:
Transcription

1 Problem-Solving Agents Chapter3 Solving Problems by Searching Reflex agents cannot work well in those environments - state/action mapping too large - take too long to learn Problem-solving agent - is one kind of goal-based agent - decides what to do by finding sequences of actions that lead to desirable states chap chap3 2 Problem Solving Agents (cont.) Formulation - Goal formulation (final state) - Problem formulation (decide what actions and states to consider) Search (look for solution i.e.action sequence) Execution (follow states in solution) Assume the environment is static, observable, discrete, deterministic chap3 3 Well-defined Problems and Solutions A problem can be defined by - Initial state In(Arad) - Possible actions (or successor function) {<Go(Sibiu), In(Sibiu)>, <Go(Timi), In(Timi)>, <Go(Zerind), In(Zerind)>} - Goal test {In(Bucharest)} - Path cost function state space of a problem Step cost: c(x, a, y) taking action a to go from state x to state y Optimal solution the lowest path cost among all solutions chap3 4 Example: Romania Example Problems Toy problems Vacuum World, 8-Puzzle, 8-Queens Problem, Cryptarithmetic, Missionaries and Cannibals Real-world problems Route finding, Touring problems Traveling salesman problem, VLSI layout, Robot navigation, Assembly sequencing, Protein Design, Internet Searching chap chap3 6 1
 States: agent location, each location might or might not contain dirt # of possible states = 2* 2 2 = 8 Initial state: any possible state Successor function: possible actions (left, Right, Suck)")


2 Vacuum World Vacuum World (cont.) States: agent location, each location might or might not contain dirt # of possible states = 2* 2 2 = 8 Initial state: any possible state Successor function: possible actions (left, Right, Suck) Goal test: check whether all the squares are clean Path cost: the number of steps, each step cost chap chap3 8 The 8-Puzzle States: location of each of the eight tiles and the blank tile # of possible states = 9!/2 = 181, !/4??? Initial state: any state Successor function: blank moves(left, Right, Up, Down) Goal test: check whether the state match as the goal configuration Path cost: the number of steps, each step cost chap3 9 The 8-Queens Incremental formulation vs. complete-state formulation States-I-1: 0-8 queens on board Successor function-i-1: add a queen to any square 14 # of possible states = (64*63* *57= 3*10 ) States-I-2: 0-8 non-attacking queens on board Successor function-i-2: add a queen to a non-attacking square in the left-most empty column # of possible states = ??? Goal test: 8 queens on board, none attacked Path cost: of no interest (since only the final state count) chap3 10 Robotic Assembly Basic Search Algorithms How do we find the solutions of previous problems? - Search the state space (remember complexity of space depends on state representation) States: real-valued coordinates of robot joint angles parts of the object to be assembled Successor function: continuous motions of robot joints Goal test : complete assembly Path cost : time to execute - Here: search through explicit tree generation ROOT= initial state. Nodes and leafs generated through successor function. - In general search generates a graph (same state through multiple paths) chap chap3 12 2


 return a solution or failure Initialize expansion according to strategy Determines search process!")


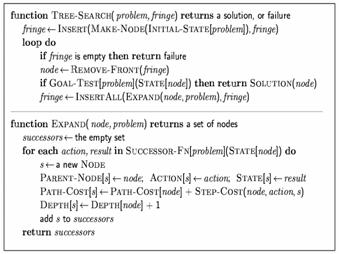
3 Tree Search Algorithms Simple Tree Search Example function TREE-SEARCH(problem, strategy) return a solution or failure Initialize search tree to the initial state of the problem loop do if no candidates for expansion then return failure choose leaf node for expansion according to strategy if node contains goal state then return solution else expand the node and add resulting nodes to the search tree end chap chap3 14 Simple tree search example Simple tree search example function TREE-SEARCH(problem, strategy) return a solution or failure Initialize search tree to the initial state of the problem loop do if no candidates for expansion then return failure choose leaf node for expansion according to strategy if node contains goal state then return solution else expand the node and add resulting nodes to the search tree end function TREE-SEARCH(problem, strategy) return a solution or failure Initialize search tree to the initial state of the problem loop do if no candidates for expansion then return failure choose leaf node for expansion according to strategy Determines search process!! if node contains goal state then return solution else expand the node and add resulting nodes to the search tree end chap chap3 16 State Space vs. Search Tree State: a (representation of) a physical configuration Node: a data structure belong to a search tree < State, Parent-Node, Action, Path-Cost, Depth> Fringe: contains generated nodes which are not yet expanded. General Tree-Search Algorithm chap chap3 18 3
4 Search Strategies A strategy is defined by picking the order of node expansion Strategies are evaluated along - Completeness --- Is it guaranteed that a solution will be found (if one exists)? - Time complexity --- How long does it take to find a solution? - Space complexity--- How much memory is needed to perform a search? - Optimality --- Is the best solution found when several solutions exist? Time and space complexity are measured in terms of b --- maximum branching factor of the search tree d --- depth of the least-cost solution m --- maximum depth of the state space (may be ) chap3 19 Uninformed Search Strategies use only the information available in the problem definition do not use state information to decide the order on which nodes are expanded Breadth-first search -Tree-Search( problem, FIFO-Queue() ) - Expand the shallowest node in the fringe. - It is both optimal and complete. Uniform-cost search Depth-first search - Expand the deepest node in the fringe. - It is neither complete nor optimal. Why? Depth-limited search Iterative deepening search - Try all possible depth limits in depth limited search. - It is both optimal and complete chap3 20 Breadth-First Search Tree-Search(problem, FIFO-Queue()) Fringe is a FIFO queue, i.e., new successors go at end Expand the shallowest unexpanded node Analysis of Breadth-First Search Complete?? Yes (if b is finite) 2 d d + 1 d + 1 Time?? 1+ b + b + L+ b + ( b b) = O( b ) expand all but the last node at level d i.e. exp. in d Space?? d +1 O( b ) keep every node in memory Optimal?? Yes (if cost = 1 per step); not optimal in general (unless actions have different cost) chap chap3 22 Analysis of Breadth-First Search (cont.) Space is the bigger problem (more than time) If d = 8, it will take 31 hours with 1 terabytes. Exponential complexity search problems cannot be solved by uninformed search methods for any but the smallest instances. DEPTH NODES TIME 0.11 seconds 11 seconds 19 minutes 31 hours 129 days 35 years 3523 years MEMORY 1 megabyte 106 megabytes 10 gigabytes 1 terabyte 101 terabytes 10 petabytes 1 exabyte chap3 23 Uniform Cost Search Each node n has a path cost g(n). Expand lowest path cost unexpanded node. Fringe is queue ordered by path cost. It will find the cheapest solution provided that n. g( Successor( n)) g( n) i.e. Every operator has a nonnegative cost. Equivalent to breadth-first search if step costs all equal chap3 24 4
 Time?")
 Optimal?")

5 Uniform Cost Search (cont.) Analysis of Uniform Cost Search Complete?? Yes (if step cost >= ε) Time?? ( C * / ε O b ) Where C * is the cost of the optimal solution Space?? ( C * / ε O b ) Optimal?? Nodes expanded in increasing order of g(n) Yes, if complete chap chap3 26 Depth-First Search Depth-First Search (cont.-1) chap chap3 28 Depth-First Search (cont.-2) Depth-First Search (cont.-3) chap chap3 30 5
 Depth-First Search (cont.-7) 20070315 chap3 33 20070315 chap3 34 Depth-First Search (cont.-8) Depth-First Search (cont.")
6 Depth-First Search (cont.-4) Depth-First Search (cont.-5) chap chap3 32 Depth-First Search (cont.-6) Depth-First Search (cont.-7) chap chap3 34 Depth-First Search (cont.-8) Depth-First Search (cont.-9) chap chap3 36 6

, i.e., linear space Optimal?? No If d = 12, b= 10, Space: 10 petabytes for BFS; 118 KB for DFS 20070315 chap3 39 Analysis of Depth-First Search (cont.")
7 Depth-First Search (cont.-10) Depth-First Search (cont.-11) chap chap3 38 Analysis of Depth-First Search Complete?? No: fails in indefinite-depth spaces, spaces with loops Modify to avoid repeated states along path Complete in finite spaces Time?? O( b m ) : terrible if m is much larger than d (m: the maximum depth of any node, d: depth of the shallowest solution) But if solutions are dense, may be much faster than breadth-first Space?? O(bm), i.e., linear space Optimal?? No If d = 12, b= 10, Space: 10 petabytes for BFS; 118 KB for DFS chap3 39 Analysis of Depth-First Search (cont.) Time requirement: - Goal at the far left: d Goal at the far right: b d 1 b 1 - Average: (How is the average derived?) + 1 b d + bd + b d 2 2( b 1) chap3 40 Depth-limited Search The unbounded trees can be alleviated by supplying depth-first search with a predetermined depth limit l. Failure (no solution) / Cutoff (no solution within the depth limit) Analysis of Depth-Limit Search Complete?? Yes, if l >= d if l <=d, the shallowest goal is beyond the depth limit. Time?? Space?? O(bl) Optimal?? No l l b + b + b b = O( b ) DFS can be viewed as a special case of depth-limit search with l = chap3 41 Diameter of state space is a better depth limit, which leads to a more efficient depth-limit search e.g. diameter = 9, for the map of Romania of 20 cities chap3 42 7
 20070315 chap3 45 20070315 chap3 46 Iterative Deepening Search (cont.-4) 20070315 chap3 47 Analysis of Iterative Deepening Search Complete?? Yes. 0 1 2 d d Time?? ( d + 1) b + db + ( d 1) b +.")

8 Iterative Deepening Search Iterative Deepening Search (cont.-1) chap chap3 44 Iterative Deepening Search (cont.-2) Iterative Deepening Search (cont.-3) chap chap3 46 Iterative Deepening Search (cont.-4) chap3 47 Analysis of Iterative Deepening Search Complete?? Yes d d Time?? ( d + 1) b + db + ( d 1) b b = O( b ) Space?? O(bd) Optimal?? Yes, if step cost = 1 Can be modified to explore uniform-cost tree. If b = 10, d = 5, N BFS = , , ,990 = 1,111,101 N DLS = , , ,000 = 111,111 N IDS = , , ,000 = 123,456 Iterative deepening is faster than breadth-first search, despite the repeated generation of states. Overhead = (123, ,111)/111,111 = 11% Iterative deepening is the preferred uninformed search when there is a large search space and the depth of the solution is not known chap3 48 8


9 Bidirectional Search Bidirectional Search (cont.-1) Search forward from the initial state. Generate successors to the current node. Search backward from the goal. Generate predecessors to the current node. Stop when two searches meet in the middle chap3 49 Two simultaneous searches from start an goal. - Motivation: b d /2 + b d /2 b d Check whether the node belongs to the other fringe before expansion. Space complexity is the most significant weakness. Complete and optimal if both searches are BF chap3 50 Bidirectional Search (cont.-2) Issues: If all operators are reversible, predecessor(n) = successor(n) Multiple goal states Cost of checking if a node exists Search strategy for each half? Comparing Uninformed Search Strategies chap3 51 b: the branching factor d: the depth of the shallowest solution m: the maximum depth of the search tree l: the depth limit chap3 52 Comparing Uninformed Search Strategies (cont.) Avoid Repeated States Issues considered in selecting search strategies: size of the search space depth of the solution solution density finite vs. infinite depth any vs. all solutions optimality? predecessors? chap3 53 Do not return to the previous state. Do not create paths with cycles. Do not generate the same state twice. - Store states in a hash table. - Check for repeated states chap3 54 9

10 Graph Search To modify Tree Search Algorithm by adding closed list --- to store every expanded node chap
Solving problems by searching. Chapter 3
 Solving problems by searching Chapter 3 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 2 Example: Romania On holiday in Romania; currently in
Solving problems by searching Chapter 3 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 2 Example: Romania On holiday in Romania; currently in
AI: problem solving and search
 : problem solving and search Stefano De Luca Slides mainly by Tom Lenaerts Outline Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search with partial information
: problem solving and search Stefano De Luca Slides mainly by Tom Lenaerts Outline Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search with partial information
Solving Problems by Searching
 Solving Problems by Searching Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 1 Introduction Problem-Solving Agents vs. Reflex Agents Problem-solving
Solving Problems by Searching Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 1 Introduction Problem-Solving Agents vs. Reflex Agents Problem-solving
Chapter 3. A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states.
 Chapter 3 A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states. A problem can be defined by four components : 1. The
Chapter 3 A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states. A problem can be defined by four components : 1. The
Artificial Intelligence
 Artificial Intelligence CSC348 Unit 3: Problem Solving and Search Syedur Rahman Lecturer, CSE Department North South University syedur.rahman@wolfson.oxon.org Artificial Intelligence: Lecture Notes The
Artificial Intelligence CSC348 Unit 3: Problem Solving and Search Syedur Rahman Lecturer, CSE Department North South University syedur.rahman@wolfson.oxon.org Artificial Intelligence: Lecture Notes The
Ar#ficial)Intelligence!!
Intelligence!!") Introduc*on! Ar#ficial)Intelligence!! Roman Barták Department of Theoretical Computer Science and Mathematical Logic Problem Solving: Uninformed Search Simple reflex agent only transfers the current percept
Introduc*on! Ar#ficial)Intelligence!! Roman Barták Department of Theoretical Computer Science and Mathematical Logic Problem Solving: Uninformed Search Simple reflex agent only transfers the current percept
Solving Problem by Searching. Chapter 3
 Solving Problem by Searching Chapter 3 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms blind search Heuristic search strategies Heuristic functions Problem-solving
Solving Problem by Searching Chapter 3 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms blind search Heuristic search strategies Heuristic functions Problem-solving
Solving problems by searching
 Solving problems by searching 1 C H A P T E R 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Outline 2 Problem-solving agents 3 Note: this is offline
Solving problems by searching 1 C H A P T E R 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Outline 2 Problem-solving agents 3 Note: this is offline
Solving problems by searching
 Solving problems by searching Chapter 3 CS 2710 1 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms CS 2710 - Blind Search 2 1 Goal-based Agents Agents that take
Solving problems by searching Chapter 3 CS 2710 1 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms CS 2710 - Blind Search 2 1 Goal-based Agents Agents that take
Chapter 3 Solving problems by searching
 1 Chapter 3 Solving problems by searching CS 461 Artificial Intelligence Pinar Duygulu Bilkent University, Slides are mostly adapted from AIMA and MIT Open Courseware 2 Introduction Simple-reflex agents
1 Chapter 3 Solving problems by searching CS 461 Artificial Intelligence Pinar Duygulu Bilkent University, Slides are mostly adapted from AIMA and MIT Open Courseware 2 Introduction Simple-reflex agents
Solving problems by searching
 Solving problems by searching Chapter 3 Systems 1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 2 Problem-solving agents Systems 3 Example:
Solving problems by searching Chapter 3 Systems 1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 2 Problem-solving agents Systems 3 Example:
Outline. Solving problems by searching. Problem-solving agents. Example: Romania
 Outline Solving problems by searching Chapter 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 1 Systems 2 Problem-solving agents Example: Romania
Outline Solving problems by searching Chapter 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 1 Systems 2 Problem-solving agents Example: Romania
Artificial Intelligence Uninformed search
 Artificial Intelligence Uninformed search A.I. Uninformed search 1 The symbols&search hypothesis for AI Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search
Artificial Intelligence Uninformed search A.I. Uninformed search 1 The symbols&search hypothesis for AI Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search
CS 380: Artificial Intelligence Lecture #3
 CS 380: Artificial Intelligence Lecture #3 William Regli Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 1 Problem-solving agents Example: Romania
CS 380: Artificial Intelligence Lecture #3 William Regli Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 1 Problem-solving agents Example: Romania
CS 8520: Artificial Intelligence
 CS 8520: Artificial Intelligence Solving Problems by Searching Paula Matuszek Spring, 2013 Slides based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are in turn based on Russell, aima.eecs.berkeley.edu/slides-pdf.
CS 8520: Artificial Intelligence Solving Problems by Searching Paula Matuszek Spring, 2013 Slides based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are in turn based on Russell, aima.eecs.berkeley.edu/slides-pdf.
CS 771 Artificial Intelligence. Problem Solving by Searching Uninformed search
 CS 771 Artificial Intelligence Problem Solving by Searching Uninformed search Complete architectures for intelligence? Search? Solve the problem of what to do. Learning? Learn what to do. Logic and inference?
CS 771 Artificial Intelligence Problem Solving by Searching Uninformed search Complete architectures for intelligence? Search? Solve the problem of what to do. Learning? Learn what to do. Logic and inference?
Chapter 2. Blind Search 8/19/2017
 Chapter 2 1 8/19/2017 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 8/19/2017 2 8/19/2017 3 On holiday in Romania; currently in Arad. Flight leaves tomorrow
Chapter 2 1 8/19/2017 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 8/19/2017 2 8/19/2017 3 On holiday in Romania; currently in Arad. Flight leaves tomorrow
Search I. slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig
 Search I slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig Problem-Solving Agents Intelligent agents can solve problems by searching a state-space State-space Model the agent s model of
Search I slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig Problem-Solving Agents Intelligent agents can solve problems by searching a state-space State-space Model the agent s model of
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems Uninformed search algorithms Informed search algorithms Chapter 3 2 Restricted
Problem solving and search Chapter 3 Chapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems Uninformed search algorithms Informed search algorithms Chapter 3 2 Restricted
Uninformed Search. Problem-solving agents. Tree search algorithms. Single-State Problems
 Uninformed Search Problem-solving agents Tree search algorithms Single-State Problems Breadth-First Search Depth-First Search Limited-Depth Search Iterative Deepening Extensions Graph search algorithms
Uninformed Search Problem-solving agents Tree search algorithms Single-State Problems Breadth-First Search Depth-First Search Limited-Depth Search Iterative Deepening Extensions Graph search algorithms
EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS
 EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS Lecture 3, 4/6/2005 University of Washington, Department of Electrical Engineering Spring 2005 Instructor: Professor Jeff A. Bilmes 4/6/2005 EE562 1 Today: Basic
EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS Lecture 3, 4/6/2005 University of Washington, Department of Electrical Engineering Spring 2005 Instructor: Professor Jeff A. Bilmes 4/6/2005 EE562 1 Today: Basic
Chapter 3: Solving Problems by Searching
 Chapter 3: Solving Problems by Searching Prepared by: Dr. Ziad Kobti 1 Problem-Solving Agent Reflex agent -> base its actions on a direct mapping from states to actions. Cannot operate well in large environments
Chapter 3: Solving Problems by Searching Prepared by: Dr. Ziad Kobti 1 Problem-Solving Agent Reflex agent -> base its actions on a direct mapping from states to actions. Cannot operate well in large environments
ITCS 6150 Intelligent Systems. Lecture 3 Uninformed Searches
 ITCS 6150 Intelligent Systems Lecture 3 Uninformed Searches Outline Problem Solving Agents Restricted form of general agent Problem Types Fully vs. partially observable, deterministic vs. stochastic Problem
ITCS 6150 Intelligent Systems Lecture 3 Uninformed Searches Outline Problem Solving Agents Restricted form of general agent Problem Types Fully vs. partially observable, deterministic vs. stochastic Problem
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 Problem formulation & examples Basic search algorithms Outline Chapter 3 2 On holiday in Romania; currently in Arad. Flight leaves tomorrow from Bucharest
Problem solving and search Chapter 3 Chapter 3 1 Problem formulation & examples Basic search algorithms Outline Chapter 3 2 On holiday in Romania; currently in Arad. Flight leaves tomorrow from Bucharest
Solving Problems by Searching
 Solving Problems by Searching CS486/686 University of Waterloo Sept 11, 2008 1 Outline Problem solving agents and search Examples Properties of search algorithms Uninformed search Breadth first Depth first
Solving Problems by Searching CS486/686 University of Waterloo Sept 11, 2008 1 Outline Problem solving agents and search Examples Properties of search algorithms Uninformed search Breadth first Depth first
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 How to Solve a (Simple) Problem 7 2 4 1 2 5 6 3 4 5 8 3 1 6 7 8 Start State Goal State Chapter 3 2 Introduction Simple goal-based agents can solve problems
Problem solving and search Chapter 3 Chapter 3 1 How to Solve a (Simple) Problem 7 2 4 1 2 5 6 3 4 5 8 3 1 6 7 8 Start State Goal State Chapter 3 2 Introduction Simple goal-based agents can solve problems
A2 Uninformed Search
 2 Uninformed Search Hantao Zhang http://www.cs.uiowa.edu/ hzhang/c145 The University of Iowa Department of omputer Science rtificial Intelligence p.1/82 Example: The 8-puzzle 2 8 3 1 7 6 4 5 It can be
2 Uninformed Search Hantao Zhang http://www.cs.uiowa.edu/ hzhang/c145 The University of Iowa Department of omputer Science rtificial Intelligence p.1/82 Example: The 8-puzzle 2 8 3 1 7 6 4 5 It can be
Example: The 8-puzzle. A2 Uninformed Search. It can be generalized to 15-puzzle, 24-puzzle, or. (n 2 1)-puzzle for n 6. Department of Computer Science
-puzzle for n 6. Department of Computer Science") 2 Uninformed Search Hantao Zhang http://www.cs.uiowa.edu/ hzhang/c145 The University of Iowa Department of omputer Science rtificial Intelligence p.1/82 Example: The 8-puzzle 2 1 7 8 3 6 4 5 It can be
2 Uninformed Search Hantao Zhang http://www.cs.uiowa.edu/ hzhang/c145 The University of Iowa Department of omputer Science rtificial Intelligence p.1/82 Example: The 8-puzzle 2 1 7 8 3 6 4 5 It can be
Problem Solving as Search. CMPSCI 383 September 15, 2011
 Problem Solving as Search CMPSCI 383 September 15, 2011 1 Today s lecture Problem-solving as search Uninformed search methods Problem abstraction Bold Claim: Many problems faced by intelligent agents,
Problem Solving as Search CMPSCI 383 September 15, 2011 1 Today s lecture Problem-solving as search Uninformed search methods Problem abstraction Bold Claim: Many problems faced by intelligent agents,
Problem Solving and Search
 Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
Solving problems by searching
 Solving problems by searching Chapter 3 Some slide credits to Hwee Tou Ng (Singapore) Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Heuristics
Solving problems by searching Chapter 3 Some slide credits to Hwee Tou Ng (Singapore) Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Heuristics
Basic Search. Fall Xin Yao. Artificial Intelligence: Basic Search
 Basic Search Xin Yao Fall 2017 Fall 2017 Artificial Intelligence: Basic Search Xin Yao Outline Motivating Examples Problem Formulation From Searching to Search Tree Uninformed Search Methods Breadth-first
Basic Search Xin Yao Fall 2017 Fall 2017 Artificial Intelligence: Basic Search Xin Yao Outline Motivating Examples Problem Formulation From Searching to Search Tree Uninformed Search Methods Breadth-first
Set 2: State-spaces and Uninformed Search. ICS 271 Fall 2015 Kalev Kask
 Set 2: State-spaces and Uninformed Search ICS 271 Fall 2015 Kalev Kask You need to know State-space based problem formulation State space (graph) Search space Nodes vs. states Tree search vs graph search
Set 2: State-spaces and Uninformed Search ICS 271 Fall 2015 Kalev Kask You need to know State-space based problem formulation State space (graph) Search space Nodes vs. states Tree search vs graph search
Artificial Intelligence Problem Solving and Uninformed Search
 Artificial Intelligence Problem Solving and Uninformed Search Maurizio Martelli, Viviana Mascardi {martelli, mascardi}@disi.unige.it University of Genoa Department of Computer and Information Science AI,
Artificial Intelligence Problem Solving and Uninformed Search Maurizio Martelli, Viviana Mascardi {martelli, mascardi}@disi.unige.it University of Genoa Department of Computer and Information Science AI,
Solving Problems by Searching
 Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching
 Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
CS486/686 Lecture Slides (c) 2014 P.Poupart
 2014 P.Poupart") 1 2 1 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: January 9, 2014 3 Outline Problem solving agents and search Examples Properties of search
1 2 1 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: January 9, 2014 3 Outline Problem solving agents and search Examples Properties of search
CAP 4630 Artificial Intelligence
 CAP 4630 Artificial Intelligence Instructor: Sam Ganzfried sganzfri@cis.fiu.edu 1 http://www.ultimateaiclass.com/ https://moodle.cis.fiu.edu/ 2 Solving problems by search 3 8-puzzle 4 8-queens 5 Search
CAP 4630 Artificial Intelligence Instructor: Sam Ganzfried sganzfri@cis.fiu.edu 1 http://www.ultimateaiclass.com/ https://moodle.cis.fiu.edu/ 2 Solving problems by search 3 8-puzzle 4 8-queens 5 Search
Multiagent Systems Problem Solving and Uninformed Search
 Multiagent Systems Problem Solving and Uninformed Search Viviana Mascardi viviana.mascardi@unige.it MAS, University of Genoa, DIBRIS Classical AI 1 / 36 Disclaimer This presentation may contain material
Multiagent Systems Problem Solving and Uninformed Search Viviana Mascardi viviana.mascardi@unige.it MAS, University of Genoa, DIBRIS Classical AI 1 / 36 Disclaimer This presentation may contain material
CS486/686 Lecture Slides (c) 2015 P.Poupart
 2015 P.Poupart") 1 2 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: May 7, 2015 3 Outline Problem solving agents and search Examples Properties of search algorithms
1 2 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: May 7, 2015 3 Outline Problem solving agents and search Examples Properties of search algorithms
Pengju XJTU 2016
 Introduction to AI Chapter03 Solving Problems by Uninformed Searching(3.1~3.4) Pengju Ren@IAIR Outline Problem-solving agents Problem types Problem formulation Search on Trees and Graphs Uninformed algorithms
Introduction to AI Chapter03 Solving Problems by Uninformed Searching(3.1~3.4) Pengju Ren@IAIR Outline Problem-solving agents Problem types Problem formulation Search on Trees and Graphs Uninformed algorithms
Goal-Based Agents Problem solving as search. Outline
 Goal-Based Agents Problem solving as search Vasant Honavar Bioinformatics and Computational Biology Program Center for Computational Intelligence, Learning, & Discovery honavar@cs.iastate.edu www.cs.iastate.edu/~honavar/
Goal-Based Agents Problem solving as search Vasant Honavar Bioinformatics and Computational Biology Program Center for Computational Intelligence, Learning, & Discovery honavar@cs.iastate.edu www.cs.iastate.edu/~honavar/
KI-Programmierung. Basic Search Algorithms
 KI-Programmierung Basic Search Algorithms Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2007/2008 B. Beckert: KI-Programmierung p.1 Example: Travelling in Romania Scenario On holiday in Romania;
KI-Programmierung Basic Search Algorithms Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2007/2008 B. Beckert: KI-Programmierung p.1 Example: Travelling in Romania Scenario On holiday in Romania;
Problem Solving. Russell and Norvig: Chapter 3
 Problem Solving Russell and Norvig: Chapter 3 Example: Route finding Example: 8-puzzle 8 2 3 4 7 6 5 6 Initial state 7 8 Goal state Example: 8-puzzle 8 2 7 8 2 3 4 5 6 3 4 7 5 6 8 2 8 2 3 4 7 3 4 7 5 6
Problem Solving Russell and Norvig: Chapter 3 Example: Route finding Example: 8-puzzle 8 2 3 4 7 6 5 6 Initial state 7 8 Goal state Example: 8-puzzle 8 2 7 8 2 3 4 5 6 3 4 7 5 6 8 2 8 2 3 4 7 3 4 7 5 6
Solving problems by searching
 Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Artificial Intelligence
 Artificial Intelligence Dr Ahmed Rafat Abas Computer Science Dept, Faculty of Computers and Informatics, Zagazig University arabas@zu.edu.eg http://www.arsaliem.faculty.zu.edu.eg/ Solving problems by searching
Artificial Intelligence Dr Ahmed Rafat Abas Computer Science Dept, Faculty of Computers and Informatics, Zagazig University arabas@zu.edu.eg http://www.arsaliem.faculty.zu.edu.eg/ Solving problems by searching
Solving Problems: Blind Search
 Solving Problems: Blind Search Instructor: B. John Oommen Chancellor s Professor Fellow: IEEE ; Fellow: IAPR School of Computer Science, Carleton University, Canada The primary source of these notes are
Solving Problems: Blind Search Instructor: B. John Oommen Chancellor s Professor Fellow: IEEE ; Fellow: IAPR School of Computer Science, Carleton University, Canada The primary source of these notes are
Uninformed Search Strategies AIMA 3.4
 Uninformed Search Strategies AIMA 3.4 CIS 391-2015 1 The Goat, Cabbage, Wolf Problem (From xkcd.com) CIS 391-2015 2 But First: Missionaries & Cannibals Three missionaries and three cannibals come to a
Uninformed Search Strategies AIMA 3.4 CIS 391-2015 1 The Goat, Cabbage, Wolf Problem (From xkcd.com) CIS 391-2015 2 But First: Missionaries & Cannibals Three missionaries and three cannibals come to a
Search EECS 395/495 Intro to Artificial Intelligence
 Search EECS 395/495 Intro to Artificial Intelligence Doug Downey (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for
Search EECS 395/495 Intro to Artificial Intelligence Doug Downey (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for
Solving problems by searching
 Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2014 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2014 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Search EECS 348 Intro to Artificial Intelligence
 Search EECS 348 Intro to Artificial Intelligence (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for systematically
Search EECS 348 Intro to Artificial Intelligence (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for systematically
Uninformed Search B. Navigating through a search tree. Navigating through a search tree. Navigating through a search tree
 Uninformed Search Russell and Norvig chap. 3 D E 1 Unexpanded s: the fringe Tree search nitial state t every point in the search process we keep track of a list of s that haven t been expanded yet: the
Uninformed Search Russell and Norvig chap. 3 D E 1 Unexpanded s: the fringe Tree search nitial state t every point in the search process we keep track of a list of s that haven t been expanded yet: the
Lecture 3. Uninformed Search
 Lecture 3 Uninformed Search 1 Uninformed search strategies Uninformed: While searching you have no clue whether one non-goal state is better than any other. Your search is blind. You don t know if your
Lecture 3 Uninformed Search 1 Uninformed search strategies Uninformed: While searching you have no clue whether one non-goal state is better than any other. Your search is blind. You don t know if your
Pengju
 Introduction to AI Chapter03 Solving Problems by Uninformed Searching(3.1~3.4) Pengju Ren@IAIR Outline Problem-solving agents Problem types Problem formulation Search on Trees and Graphs Uninformed algorithms
Introduction to AI Chapter03 Solving Problems by Uninformed Searching(3.1~3.4) Pengju Ren@IAIR Outline Problem-solving agents Problem types Problem formulation Search on Trees and Graphs Uninformed algorithms
Solving Problems by Searching
 INF5390 Kunstig intelligens Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA Chapter 3: Solving
INF5390 Kunstig intelligens Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA Chapter 3: Solving
Search Algorithms. Uninformed Blind search. Informed Heuristic search. Important concepts:
 Uninformed Search Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy search,
Uninformed Search Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy search,
Uninformed Search B. Navigating through a search tree. Navigating through a search tree. Navigating through a search tree
 Uninformed Search Russell and Norvig chap. 3 Following this, the pong paddle went on a mission to destroy tari headquarters and, due to a mixup, found himself inside the game The Matrix Reloaded. oy, was
Uninformed Search Russell and Norvig chap. 3 Following this, the pong paddle went on a mission to destroy tari headquarters and, due to a mixup, found himself inside the game The Matrix Reloaded. oy, was
CS 151: Intelligent Agents, Problem Formulation and Search
 CS 151: Intelligent Agents, Problem Formulation and Search How do we make a computer "smart?" Computer, clean the house! Um OK?? This one's got no chance How do we represent this problem? Hmmm where to
CS 151: Intelligent Agents, Problem Formulation and Search How do we make a computer "smart?" Computer, clean the house! Um OK?? This one's got no chance How do we represent this problem? Hmmm where to
Solving Problems by Searching
 INF5390 Kunstig intelligens Sony Vaio VPC-Z12 Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA
INF5390 Kunstig intelligens Sony Vaio VPC-Z12 Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA
Week 3: Path Search. COMP9414/ 9814/ 3411: Artificial Intelligence. Motivation. Example: Romania. Romania Street Map. Russell & Norvig, Chapter 3.
 COMP9414/9814/3411 17s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence Week 3: Path Search Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions based only
COMP9414/9814/3411 17s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence Week 3: Path Search Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions based only
Solving Problems by Searching (Blindly)
") Solving Problems by Searching (Blindly) R&N: Chap. 3 (many of these slides borrowed from Stanford s AI Class) Problem Solving Agents Decide what to do by finding a sequence of actions that lead to desirable
Solving Problems by Searching (Blindly) R&N: Chap. 3 (many of these slides borrowed from Stanford s AI Class) Problem Solving Agents Decide what to do by finding a sequence of actions that lead to desirable
Problem solving and search
 Problem solving and search hapter 3 hapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms hapter 3 3 Restricted form of general agent: Problem-solving
Problem solving and search hapter 3 hapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms hapter 3 3 Restricted form of general agent: Problem-solving
CS 4700: Foundations of Artificial Intelligence. Bart Selman. Search Techniques R&N: Chapter 3
 CS 4700: Foundations of Artificial Intelligence Bart Selman Search Techniques R&N: Chapter 3 Outline Search: tree search and graph search Uninformed search: very briefly (covered before in other prerequisite
CS 4700: Foundations of Artificial Intelligence Bart Selman Search Techniques R&N: Chapter 3 Outline Search: tree search and graph search Uninformed search: very briefly (covered before in other prerequisite
4. Solving Problems by Searching
 COMP9414/9814/3411 15s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence 4. Solving Problems by Searching Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions
COMP9414/9814/3411 15s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence 4. Solving Problems by Searching Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions
ARTIFICIAL INTELLIGENCE. Pathfinding and search
 INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Pathfinding and search Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Pathfinding and search Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
Problem Solving and Search. Chapter 3
 Problem olving and earch hapter 3 Outline Problem-solving agents Problem formulation Example problems asic search algorithms In the simplest case, an agent will: formulate a goal and a problem; Problem-olving
Problem olving and earch hapter 3 Outline Problem-solving agents Problem formulation Example problems asic search algorithms In the simplest case, an agent will: formulate a goal and a problem; Problem-olving
Problem solving and search
 Problem solving and search hapter 3 hapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms hapter 3 3 Example: omania On holiday in omania;
Problem solving and search hapter 3 hapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms hapter 3 3 Example: omania On holiday in omania;
Problem solving and search: Chapter 3, Sections 1 5
 Problem solving and search: hapter 3, Sections 1 5 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms 2 Problem-solving agents estricted form of
Problem solving and search: hapter 3, Sections 1 5 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms 2 Problem-solving agents estricted form of
Problem solving and search: Chapter 3, Sections 1 5
 Problem solving and search: hapter 3, Sections 1 5 S 480 2 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms Problem-solving agents estricted form
Problem solving and search: hapter 3, Sections 1 5 S 480 2 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms Problem-solving agents estricted form
Uninformed Search Methods
 Uninformed Search Methods Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy
Uninformed Search Methods Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy
Blind (Uninformed) Search (Where we systematically explore alternatives)
 Search (Where we systematically explore alternatives)") Blind (Uninformed) Search (Where we systematically explore alternatives) R&N: Chap. 3, Sect. 3.3 5 Slides from Jean-Claude Latombe at Stanford University (used with permission) Simple Problem-Solving-Agent
Blind (Uninformed) Search (Where we systematically explore alternatives) R&N: Chap. 3, Sect. 3.3 5 Slides from Jean-Claude Latombe at Stanford University (used with permission) Simple Problem-Solving-Agent
Artificial Intelligence
 Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
AGENTS AND ENVIRONMENTS. What is AI in reality?
 AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
Uninformed Search Strategies AIMA
 Uninformed Search Strategies AIMA 3.3-3.4 CIS 421/521 - Intro to AI - Fall 2017 1 Review: Formulating search problems Formulate search problem States: configurations of the puzzle (9! configurations) Actions:
Uninformed Search Strategies AIMA 3.3-3.4 CIS 421/521 - Intro to AI - Fall 2017 1 Review: Formulating search problems Formulate search problem States: configurations of the puzzle (9! configurations) Actions:
TDDC17. Physical Symbol System Hypothesis. Designation and Interpretation. Physical Symbol Systems
 Physical Symbol System Hypothesis Computer Science as Empirical Enquiry: Symbols and Search Newell and Simon (1976) TDDC17 Seminar II Search I Physical Symbol Systems Uninformed Search Newell and Simon
Physical Symbol System Hypothesis Computer Science as Empirical Enquiry: Symbols and Search Newell and Simon (1976) TDDC17 Seminar II Search I Physical Symbol Systems Uninformed Search Newell and Simon
Outline. Solving Problems by Searching. Introduction. Problem-solving agents
 Outline Solving Problems by Searching S/ University of Waterloo Sept 7, 009 Problem solving agents and search Examples Properties of search algorithms Uninformed search readth first Depth first Iterative
Outline Solving Problems by Searching S/ University of Waterloo Sept 7, 009 Problem solving agents and search Examples Properties of search algorithms Uninformed search readth first Depth first Iterative
AGENTS AND ENVIRONMENTS. What is AI in reality?
 AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
Uninformed search strategies (Section 3.4) Source: Fotolia
 Source: Fotolia") Uninformed search strategies (Section 3.4) Source: Fotolia Uninformed search strategies A search strategy is defined by picking the order of node expansion Uninformed search strategies use only the information
Uninformed search strategies (Section 3.4) Source: Fotolia Uninformed search strategies A search strategy is defined by picking the order of node expansion Uninformed search strategies use only the information
CS 331: Artificial Intelligence Uninformed Search. Real World Search Problems
 S 331: rtificial Intelligence Uninformed Search 1 Real World Search Problems 2 1 Simpler Search Problems 3 ssumptions bout Our Environment Fully Observable Deterministic Sequential Static Discrete Single-agent
S 331: rtificial Intelligence Uninformed Search 1 Real World Search Problems 2 1 Simpler Search Problems 3 ssumptions bout Our Environment Fully Observable Deterministic Sequential Static Discrete Single-agent
HW#1 due today. HW#2 due Monday, 9/09/13, in class Continue reading Chapter 3
 9-04-2013 Uninformed (blind) search algorithms Breadth-First Search (BFS) Uniform-Cost Search Depth-First Search (DFS) Depth-Limited Search Iterative Deepening Best-First Search HW#1 due today HW#2 due
9-04-2013 Uninformed (blind) search algorithms Breadth-First Search (BFS) Uniform-Cost Search Depth-First Search (DFS) Depth-Limited Search Iterative Deepening Best-First Search HW#1 due today HW#2 due
Artificial Intelligence, CS, Nanjing University Spring, 2018, Yang Yu. Lecture 2: Search 1.
 rtificial Intelligence, S, Nanjing University Spring, 2018, Yang Yu Lecture 2: Search 1 http://lamda.nju.edu.cn/yuy/course_ai18.ashx Problem in the lecture 7 2 4 51 2 3 5 6 4 5 6 8 3 1 7 8 Start State
rtificial Intelligence, S, Nanjing University Spring, 2018, Yang Yu Lecture 2: Search 1 http://lamda.nju.edu.cn/yuy/course_ai18.ashx Problem in the lecture 7 2 4 51 2 3 5 6 4 5 6 8 3 1 7 8 Start State
ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING
 LECTURES 2 AND 3: PROBLEM SOLVING") ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING BY SEARCH Gabriela Ochoa http://www.cs.stir.ac.uk/~goc/ OUTLINE Problem solving by searching Problem formulation Example problems Search
ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING BY SEARCH Gabriela Ochoa http://www.cs.stir.ac.uk/~goc/ OUTLINE Problem solving by searching Problem formulation Example problems Search
Problem solving and search
 Problem solving and search hapter 3 hapter 3 1 eminders ssignment 0 due midnight Thursday 9/8 ssignment 1 posted, due 9/20 (online or in box in 283) hapter 3 2 Outline Problem-solving agents Problem types
Problem solving and search hapter 3 hapter 3 1 eminders ssignment 0 due midnight Thursday 9/8 ssignment 1 posted, due 9/20 (online or in box in 283) hapter 3 2 Outline Problem-solving agents Problem types
3 SOLVING PROBLEMS BY SEARCHING
 48 3 SOLVING PROBLEMS BY SEARCHING A goal-based agent aims at solving problems by performing actions that lead to desirable states Let us first consider the uninformed situation in which the agent is not
48 3 SOLVING PROBLEMS BY SEARCHING A goal-based agent aims at solving problems by performing actions that lead to desirable states Let us first consider the uninformed situation in which the agent is not
Uninformed Search strategies. AIMA sections 3.4,3.5
 AIMA sections 3.4,3.5 search use only the information available in the problem denition Breadth-rst search Uniform-cost search Depth-rst search Depth-limited search Iterative deepening search Breadth-rst
AIMA sections 3.4,3.5 search use only the information available in the problem denition Breadth-rst search Uniform-cost search Depth-rst search Depth-limited search Iterative deepening search Breadth-rst
Reminders. Problem solving and search. Problem-solving agents. Outline. Assignment 0 due 5pm today
 ssignment 0 due 5pm today eminders Problem solving and search ssignment 1 posted, due 2/9 ection 105 will move to 9-10am starting next week hapter 3 hapter 3 1 hapter 3 2 Outline Problem-solving agents
ssignment 0 due 5pm today eminders Problem solving and search ssignment 1 posted, due 2/9 ection 105 will move to 9-10am starting next week hapter 3 hapter 3 1 hapter 3 2 Outline Problem-solving agents
CMU-Q Lecture 2: Search problems Uninformed search. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
Uninformed (also called blind) search algorithms
 search algorithms") Uninformed (also called blind) search algorithms First Lecture Today (Thu 30 Jun) Read Chapters 18.6.1-2, 20.3.1 Second Lecture Today (Thu 30 Jun) Read Chapter 3.1-3.4 Next Lecture (Tue 5 Jul) Chapters
Uninformed (also called blind) search algorithms First Lecture Today (Thu 30 Jun) Read Chapters 18.6.1-2, 20.3.1 Second Lecture Today (Thu 30 Jun) Read Chapter 3.1-3.4 Next Lecture (Tue 5 Jul) Chapters
Problem solving and search
 Problem solving and search Chapter 3 TB Artificial Intelligence Slides from AIMA http://aima.cs.berkeley.edu 1 /1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic
Problem solving and search Chapter 3 TB Artificial Intelligence Slides from AIMA http://aima.cs.berkeley.edu 1 /1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic
Uninformed Search. Chapter 3
 Uninformed Search Chapter 3 (Based on slides by Stuart Russell, Subbarao Kambhampati, Dan Weld, Oren Etzioni, Henry Kautz, Richard Korf, and other UW-AI faculty) Agent s Knowledge Representation Type State
Uninformed Search Chapter 3 (Based on slides by Stuart Russell, Subbarao Kambhampati, Dan Weld, Oren Etzioni, Henry Kautz, Richard Korf, and other UW-AI faculty) Agent s Knowledge Representation Type State
Lecture 4: Search 3. Victor R. Lesser. CMPSCI 683 Fall 2010
 Lecture 4: Search 3 Victor R. Lesser CMPSCI 683 Fall 2010 First Homework 1 st Programming Assignment 2 separate parts (homeworks) First part due on (9/27) at 5pm Second part due on 10/13 at 5pm Send homework
Lecture 4: Search 3 Victor R. Lesser CMPSCI 683 Fall 2010 First Homework 1 st Programming Assignment 2 separate parts (homeworks) First part due on (9/27) at 5pm Second part due on 10/13 at 5pm Send homework
Problem solving and search
 Problem solving and search hapter 3 hapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms hapter 3 2 estricted form of general agent: Problem-solving
Problem solving and search hapter 3 hapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms hapter 3 2 estricted form of general agent: Problem-solving
Uninformed Search. CS171, Winter 2018 Introduction to Artificial Intelligence Prof. Richard Lathrop. Reading: R&N
 Uninformed Search CS171, Winter 2018 Introduction to Artificial Intelligence Prof. Richard Lathrop Reading: R&N 3.1-3.4 Uninformed search strategies Uninformed (blind): You have no clue whether one non-goal
Uninformed Search CS171, Winter 2018 Introduction to Artificial Intelligence Prof. Richard Lathrop Reading: R&N 3.1-3.4 Uninformed search strategies Uninformed (blind): You have no clue whether one non-goal
Blind (Uninformed) Search (Where we systematically explore alternatives)
 Search (Where we systematically explore alternatives)") Blind (Uninformed) Search (Where we systematically explore alternatives) R&N: Chap. 3, Sect. 3.3 5 1 Simple Problem-Solving-Agent Agent Algorithm 1. s 0 sense/read initial state 2. GOAL? select/read goal
Blind (Uninformed) Search (Where we systematically explore alternatives) R&N: Chap. 3, Sect. 3.3 5 1 Simple Problem-Solving-Agent Agent Algorithm 1. s 0 sense/read initial state 2. GOAL? select/read goal
UNINFORMED SEARCH. What to do if teammates drop? Still have 3 or more? No problem keep going. Have two or fewer and want to be merged?
 UNINFORMED SEARCH EECS492 January 14, 2010 Administrative What to do if teammates drop? Still have 3 or more? No problem keep going. Have two or fewer and want to be merged? We ll do what we can. Submitting
UNINFORMED SEARCH EECS492 January 14, 2010 Administrative What to do if teammates drop? Still have 3 or more? No problem keep going. Have two or fewer and want to be merged? We ll do what we can. Submitting
Problem-solving agents. Problem solving and search. Example: Romania. Reminders. Example: Romania. Outline. Chapter 3
 Problem-solving agents Problem solving and search hapter 3 function imple-problem-olving-gent( percept) returns an action static: seq, an action sequence, initially empty state, some description of the
Problem-solving agents Problem solving and search hapter 3 function imple-problem-olving-gent( percept) returns an action static: seq, an action sequence, initially empty state, some description of the
Vorlesung Grundlagen der Künstlichen Intelligenz
 Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Robot Programming with Lisp
 6. Search Algorithms Gayane Kazhoyan (Stuart Russell, Peter Norvig) Institute for University of Bremen Contents Problem Definition Uninformed search strategies BFS Uniform-Cost DFS Depth-Limited Iterative
6. Search Algorithms Gayane Kazhoyan (Stuart Russell, Peter Norvig) Institute for University of Bremen Contents Problem Definition Uninformed search strategies BFS Uniform-Cost DFS Depth-Limited Iterative
Logistics. u AI Nugget presentations. u Project Team Wikis, pages. u PolyLearn: Does everybody have access? u Lab and Homework Assignments.
 Logistics u AI Nugget presentations u Section 1: Thomas Soria, Gagandeep Singh Kohli, Alex Ledwith u Section 3: Martin Silverio u Project Team Wikis, pages u project description refined: v Features, Requirements,
Logistics u AI Nugget presentations u Section 1: Thomas Soria, Gagandeep Singh Kohli, Alex Ledwith u Section 3: Martin Silverio u Project Team Wikis, pages u project description refined: v Features, Requirements,
CS 331: Artificial Intelligence Uninformed Search. Real World Search Problems
 S 331: rtificial Intelligence Uninformed Search 1 Real World Search Problems 2 1 Simpler Search Problems 3 Static Observable Discrete Deterministic Single-agent ssumptions bout Our Environment 4 2 Search
S 331: rtificial Intelligence Uninformed Search 1 Real World Search Problems 2 1 Simpler Search Problems 3 Static Observable Discrete Deterministic Single-agent ssumptions bout Our Environment 4 2 Search