Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
|
|
|
- Kristian Harrington
- 6 years ago
- Views:
Transcription


1 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1 2 NVIDIA TU Munich 3 Stanford University International Conference on Computer Vision 2017
2 Overview Motivation & State-of-the-art Approach Results Conclusion 2
3 Overview Motivation & State-of-the-art Approach Results Conclusion 3
4 Motivation Recent progress in Augmented Reality (AR) / Virtual Reality (VR) Microsoft HoloLens HTC Vive 4
5 Motivation Recent progress in Augmented Reality (AR) / Virtual Reality (VR) Requirement of high-quality 3D content for AR, VR, Gaming Microsoft HoloLens HTC Vive NVIDIA VR Funhouse 5
6 Motivation Recent progress in Augmented Reality (AR) / Virtual Reality (VR) Requirement of high-quality 3D content for AR, VR, Gaming Usually: manual modelling (e.g. Maya) Microsoft HoloLens HTC Vive NVIDIA VR Funhouse 6

7 Motivation Recent progress in Augmented Reality (AR) / Virtual Reality (VR) Requirement of high-quality 3D content for AR, VR, Gaming Usually: manual modelling (e.g. Maya) Wide availability of commodity RGB-D sensors: efficient methods for 3D reconstruction Microsoft HoloLens HTC Vive NVIDIA VR Funhouse Asus Xtion 7
8 Motivation Recent progress in Augmented Reality (AR) / Virtual Reality (VR) Requirement of high-quality 3D content for AR, VR, Gaming Usually: manual modelling (e.g. Maya) Wide availability of commodity RGB-D sensors: efficient methods for 3D reconstruction Microsoft HoloLens HTC Vive Challenge: how to reconstruct high-quality 3D models with best-possible geometry and color from low-cost depth sensors? NVIDIA VR Funhouse Asus Xtion 8
9 State-of-the-art RGB-D based 3D Reconstruction Goal: stream of RGB-D frames of a scene 3D shape that maximizes the geometric consistency 9
10 State-of-the-art RGB-D based 3D Reconstruction Goal: stream of RGB-D frames of a scene 3D shape that maximizes the geometric consistency Real-time, robust, fairly accurate geometric reconstructions KinectFusion, 2011 KinectFusion: Real-time Dense Surface Mapping and Tracking, Newcombe et al., ISMAR
11 State-of-the-art RGB-D based 3D Reconstruction Goal: stream of RGB-D frames of a scene 3D shape that maximizes the geometric consistency Real-time, robust, fairly accurate geometric reconstructions KinectFusion, 2011 KinectFusion: Real-time Dense Surface Mapping and Tracking, Newcombe et al., ISMAR DynamicFusion, 2015 DynamicFusion: Reconstruction and Tracking of Non-rigid Scenes in Real-time, Newcombe et al., CVPR



12 State-of-the-art RGB-D based 3D Reconstruction Goal: stream of RGB-D frames of a scene 3D shape that maximizes the geometric consistency Real-time, robust, fairly accurate geometric reconstructions KinectFusion, 2011 KinectFusion: Real-time Dense Surface Mapping and Tracking, Newcombe et al., ISMAR DynamicFusion, 2015 DynamicFusion: Reconstruction and Tracking of Non-rigid Scenes in Real-time, Newcombe et al., CVPR BundleFusion, 2017 BundleFusion: Real-time Globally Consistent 3D Reconstruction using On-the-fly Surface Re-integration, Dai et al., ToG
13 State-of-the-art Voxel Hashing Baseline RGB-D based 3D reconstruction framework initial camera poses sparse SDF reconstruction Real-time 3D Reconstruction at Scale using Voxel Hashing, Nießner et al., ToG
 inaccurate and over-smoothed geometry Real-time 3D Reconstruction at Scale using Voxel Hashing, Nießner et al.")
14 State-of-the-art Voxel Hashing Baseline RGB-D based 3D reconstruction framework initial camera poses sparse SDF reconstruction Challenges: (Slightly) inaccurate and over-smoothed geometry Real-time 3D Reconstruction at Scale using Voxel Hashing, Nießner et al., ToG
15 State-of-the-art Voxel Hashing Baseline RGB-D based 3D reconstruction framework initial camera poses sparse SDF reconstruction Challenges: (Slightly) inaccurate and over-smoothed geometry Bad colors Real-time 3D Reconstruction at Scale using Voxel Hashing, Nießner et al., ToG

16 State-of-the-art Voxel Hashing Baseline RGB-D based 3D reconstruction framework initial camera poses sparse SDF reconstruction Challenges: (Slightly) inaccurate and over-smoothed geometry Bad colors Inaccurate camera pose estimation Real-time 3D Reconstruction at Scale using Voxel Hashing, Nießner et al., ToG
 Real-time 3D Reconstruction at Scale using Voxel Hashing, Nießner et al.")
17 State-of-the-art Voxel Hashing Baseline RGB-D based 3D reconstruction framework initial camera poses sparse SDF reconstruction Challenges: (Slightly) inaccurate and over-smoothed geometry Bad colors Inaccurate camera pose estimation Input data quality (e.g. motion blur, sensor noise) Real-time 3D Reconstruction at Scale using Voxel Hashing, Nießner et al., ToG
18 State-of-the-art Voxel Hashing Baseline RGB-D based 3D reconstruction framework initial camera poses sparse SDF reconstruction Challenges: (Slightly) inaccurate and over-smoothed geometry Bad colors Inaccurate camera pose estimation Input data quality (e.g. motion blur, sensor noise) Real-time 3D Reconstruction at Scale using Voxel Hashing, Nießner et al., ToG

19 State-of-the-art Voxel Hashing Baseline RGB-D based 3D reconstruction framework initial camera poses sparse SDF reconstruction Challenges: (Slightly) inaccurate and over-smoothed geometry Bad colors Inaccurate camera pose estimation Input data quality (e.g. motion blur, sensor noise) Goal: High-Quality Reconstruction of Geometry and Color Real-time 3D Reconstruction at Scale using Voxel Hashing, Nießner et al., ToG
20 State-of-the-art 20
21 State-of-the-art High-Quality Colors [Zhou2014] Optimize camera poses and image deformations to optimally fit initial (maybe wrong) reconstruction But: HQ images required, no geometry refinement involved Color Map Optimization for 3D Reconstruction with Consumer Depth Cameras, Zhou and Koltun, ToG
22 State-of-the-art High-Quality Colors [Zhou2014] High-Quality Geometry [Zollhöfer2015] Optimize camera poses and image deformations to optimally fit initial (maybe wrong) reconstruction But: HQ images required, no geometry refinement involved Color Map Optimization for 3D Reconstruction with Consumer Depth Cameras, Zhou and Koltun, ToG 2014 Adjust camera poses in advance (bundle adjustment) to improve color Use shading cues (RGB) to refine geometry (shading based refinement of surface & albedo) But: RGB is fixed (no color refinement based on refined geometry) Shading-based Refinement on Volumetric Signed Distance Functions, Zollhöfer et al., ToG
![State-of-the-art High-Quality Colors [Zhou2014] High-Quality](/docs-images/75/72681473/images/23-0.jpg "Geometry [Zollhöfer2015] Optimize camera poses and image")


 But: RGB")


23 State-of-the-art High-Quality Colors [Zhou2014] High-Quality Geometry [Zollhöfer2015] Optimize camera poses and image deformations to optimally fit initial (maybe wrong) reconstruction But: HQ images required, no geometry refinement involved Color Map Optimization for 3D Reconstruction with Consumer Depth Cameras, Zhou and Koltun, ToG 2014 Adjust camera poses in advance (bundle adjustment) to improve color Use shading cues (RGB) to refine geometry (shading based refinement of surface & albedo) But: RGB is fixed (no color refinement based on refined geometry) Shading-based Refinement on Volumetric Signed Distance Functions, Zollhöfer et al., ToG 2015 Idea: jointly optimize for geometry, albedo and image formation model to simultaneously obtain high-quality geometry and appearance! 23
24 Our Method 24


25 Our Method Temporal view sampling & filtering techniques (input frames) 25
 image formation model")
26 Our Method Temporal view sampling & filtering techniques (input frames) Joint optimization of surface & albedo (Signed Distance Field) image formation model 26
 image formation model")
27 Our Method Temporal view sampling & filtering techniques (input frames) Joint optimization of surface & albedo (Signed Distance Field) image formation model 27
 image formation model Lighting estimation using Spatially- Varying Spherical Harmonics")
28 Our Method Temporal view sampling & filtering techniques (input frames) Joint optimization of surface & albedo (Signed Distance Field) image formation model Lighting estimation using Spatially- Varying Spherical Harmonics (SVSH) 28
29 Our Method Temporal view sampling & filtering techniques (input frames) Joint optimization of surface & albedo (Signed Distance Field) image formation model Lighting estimation using Spatially- Varying Spherical Harmonics (SVSH) Optimized colors (by-product) 29
30 Overview Motivation & State-of-the-art Approach Results Conclusion 30
31 Approach Overview RGB-D 31
32 Approach Overview RGB-D SDF Fusion 32
33 Approach Overview RGB-D SDF Fusion Shading-based Refinement (Shape-from-Shading) 33
34 Approach Overview RGB-D SDF Fusion Shading-based Refinement (Shape-from-Shading) Temporal view sampling / filtering 34
35 Approach Overview RGB-D SDF Fusion Shading-based Refinement (Shape-from-Shading) Spatially-Varying Lighting Estimation Temporal view sampling / filtering 35
36 Approach Overview RGB-D SDF Fusion Shading-based Refinement (Shape-from-Shading) Spatially-Varying Lighting Estimation Joint Appearance and Geometry Optimization surface albedo image formation model Temporal view sampling / filtering 36
37 Approach Overview RGB-D SDF Fusion Shading-based Refinement (Shape-from-Shading) High-Quality 3D Reconstruction Spatially-Varying Lighting Estimation Joint Appearance and Geometry Optimization surface albedo image formation model Temporal view sampling / filtering 37
38 Approach Overview RGB-D 38


39 RGB-D Data Example: Fountain dataset 1086 RGB-D frames Sensor: Depth 640x480px Color 1280x1024px ~10 Hz Primesense Poses estimated using Voxel Hashing Source: 39
40 Approach Overview SDF Fusion 40
41 Signed Distance Fields Volumetric 3D model representation Voxel grid: dense (e.g. KinectFusion) or sparse (e.g. Voxel Hashing) A volumetric method for building complex models from range images, Curless and Levoy, SIGGRAPH
 Each voxel stores: Signed Distance Function (SDF): signed distance")

42 Signed Distance Fields Volumetric 3D model representation Voxel grid: dense (e.g. KinectFusion) or sparse (e.g. Voxel Hashing) Each voxel stores: Signed Distance Function (SDF): signed distance to closest surface Color values Weights A volumetric method for building complex models from range images, Curless and Levoy, SIGGRAPH
43 Signed Distance Fields Fusion of depth maps Integrate depth maps into SDF with their estimated camera poses 43
44 Signed Distance Fields Fusion of depth maps Integrate depth maps into SDF with their estimated camera poses Voxel updates using weighted average 44
45 Signed Distance Fields Fusion of depth maps Integrate depth maps into SDF with their estimated camera poses Voxel updates using weighted average 45
46 Signed Distance Fields Fusion of depth maps Integrate depth maps into SDF with their estimated camera poses Voxel updates using weighted average 46
47 Signed Distance Fields Fusion of depth maps Integrate depth maps into SDF with their estimated camera poses Voxel updates using weighted average 47
48 Signed Distance Fields Fusion of depth maps Integrate depth maps into SDF with their estimated camera poses Voxel updates using weighted average Extract ISO-surface with Marching Cubes (triangle mesh) Marching cubes: A high resolution 3D surface construction algorithm, Lorensen and Cline, SIGGRAPH
49 Approach Overview Temporal view sampling / filtering 49


50 Keyframe Selection Compute per-frame blur score (for color image) Frame 81 Frame 84 Select frame with best score within a fixed size window as keyframe The blur effect: perception and estimation with a new no-reference perceptual blur metric, Crete et al., SPIE
51 Sampling / Filtering Sampling of voxel observations Sample from selected keyframes only Input keyframes Collect observations for voxel in input views: Reconstruction 51
52 Sampling / Filtering Sampling of voxel observations Sample from selected keyframes only Input keyframes Collect observations for voxel in input views: Voxel center transformed and projected into input view Reconstruction 52
53 Sampling / Filtering Sampling of voxel observations Sample from selected keyframes only Input keyframes Collect observations for voxel in input views: Voxel center transformed and projected into input view Observation weights: view-dependent on normal and depth Filter observations: keep only best 5 observations by weight Reconstruction 53
54 Approach Overview Double-hierarchical (coarse-to-fine: SDF Volume / RGB-D) Shading-based Refinement (Shape-from-Shading) Spatially-Varying Lighting Estimation Joint Appearance and Geometry Optimization surface albedo image formation model 54
55 Shape-from-Shading Shading equation: 55
56 Shape-from-Shading Shading equation: surface normal 56
57 Shape-from-Shading Shading equation: lighting surface normal 57
58 Shape-from-Shading Shading equation: albedo lighting surface normal 58
59 Shape-from-Shading Shading equation: Shading albedo lighting surface normal 59
60 Shape-from-Shading Shading equation: Shading albedo lighting surface normal Shading-based refinement: Intuition: high-frequency changes in surface geometry shading cues in input images 60
61 Shape-from-Shading Shading equation: Shading albedo lighting surface normal Shading-based refinement: Intuition: high-frequency changes in surface geometry shading cues in input images Estimate lighting given surface and albedo (intrinsic material properties) 61
62 Shape-from-Shading Shading equation: Shading albedo lighting surface normal - Shading-based refinement: Intuition: high-frequency changes in surface geometry shading cues in input images Estimate lighting given surface and albedo (intrinsic material properties) Estimate surface and albedo given the lighting: minimize difference between estimated shading and input luminance 62
63 Approach Overview Spatially-Varying Lighting Estimation 63
64 Lighting Estimation Spherical Harmonics (SH) Encode incident lighting for a given surface point Smooth for Lambertian surfaces 64
65 Lighting Estimation Spherical Harmonics (SH) Encode incident lighting for a given surface point Smooth for Lambertian surfaces SH Basis functions H m parametrized by unit normal n 65
66 Lighting Estimation Spherical Harmonics (SH) Encode incident lighting for a given surface point Smooth for Lambertian surfaces SH Basis functions H m parametrized by unit normal n Good approx. using only 9 SH basis functions (2nd order) 66
67 Lighting Estimation Spherical Harmonics (SH) Encode incident lighting for a given surface point Smooth for Lambertian surfaces SH Basis functions H m parametrized by unit normal n Good approx. using only 9 SH basis functions (2nd order) Estimate SH coefficients: 67

68 Lighting Estimation Spherical Harmonics (SH) Encode incident lighting for a given surface point Smooth for Lambertian surfaces SH Basis functions H m parametrized by unit normal n Good approx. using only 9 SH basis functions (2nd order) Estimate SH coefficients: Shortcoming: purely directional cannot represent scene lighting for all surface points simultaneously 68
69 Spatially-Varying Lighting Subvolume Partitioning 69
70 Spatially-Varying Lighting Subvolume Partitioning Partition SDF volume into subvolumes 70
71 Spatially-Varying Lighting Subvolume Partitioning Partition SDF volume into subvolumes Estimate independent SH coefficients for each subvolume 71


72 Spatially-Varying Lighting Subvolume Partitioning Partition SDF volume into subvolumes Estimate independent SH coefficients for each subvolume Obtain per-voxel SH coefficients through tri-linear interpolation 72
73 Spatially-Varying Lighting Joint Optimization 73
74 Spatially-Varying Lighting Joint Optimization Estimate SVSH coefficients for all subvolumes jointly: 74
75 Spatially-Varying Lighting Joint Optimization Estimate SVSH coefficients for all subvolumes jointly: Data term: Similarity between estimated shading and input luminance 75
76 Spatially-Varying Lighting Joint Optimization Estimate SVSH coefficients for all subvolumes jointly: Data term: Similarity between estimated shading and input luminance Laplacian regularizer: Smooth illumination changes 76



77 Approach Overview Joint Appearance and Geometry Optimization surface albedo image formation model 77
78 Joint Optimization Shading-based SDF optimization Joint optimization of geometry, albedo and image formation model (camera poses and camera intrinsics): with 78
79 Joint Optimization Shading-based SDF optimization Joint optimization of geometry, albedo and image formation model (camera poses and camera intrinsics): with Gradient-based shading constraint (data term) 79
80 Joint Optimization Shading-based SDF optimization Joint optimization of geometry, albedo and image formation model (camera poses and camera intrinsics): with Gradient-based shading constraint (data term) Volumetric regularizer: smoothness in distance values (Laplacian) 80
81 Joint Optimization Shading-based SDF optimization Joint optimization of geometry, albedo and image formation model (camera poses and camera intrinsics): with Gradient-based shading constraint (data term) Volumetric regularizer: smoothness in distance values (Laplacian) Surface Stabilization constraint: stay close to initial distance values 81
82 Joint Optimization Shading-based SDF optimization Joint optimization of geometry, albedo and image formation model (camera poses and camera intrinsics): with Gradient-based shading constraint (data term) Volumetric regularizer: smoothness in distance values (Laplacian) Surface Stabilization constraint: stay close to initial distance values Albedo regularizer: constrain albedo changes based on chromaticity (Laplacian) 82
83 Joint Optimization Shading Constraint (data term) Idea: maximize consistency between estimated voxel shading and sampled intensities in input luminance images (gradient for robustness) 83
84 Joint Optimization Shading Constraint (data term) Idea: maximize consistency between estimated voxel shading and sampled intensities in input luminance images (gradient for robustness) Best views for voxel and respective view-dependent weights 84
85 Joint Optimization Shading Constraint (data term) Idea: maximize consistency between estimated voxel shading and sampled intensities in input luminance images (gradient for robustness) Best views for voxel and respective view-dependent weights Shading: allows for optimization of surface (through normal) and albedo 85
86 Joint Optimization Shading Constraint (data term) Idea: maximize consistency between estimated voxel shading and sampled intensities in input luminance images (gradient for robustness) Best views for voxel and respective view-dependent weights Shading: allows for optimization of surface (through normal) and albedo Voxel center transformed and projected into input view 86
87 Joint Optimization Shading Constraint (data term) Idea: maximize consistency between estimated voxel shading and sampled intensities in input luminance images (gradient for robustness) Best views for voxel and respective view-dependent weights Shading: allows for optimization of surface (through normal) and albedo Voxel center transformed and projected into input view Sampling: allows for optimization of camera poses and camera intrinsics 87
88 Recolorization Optimal colors Recompute voxel colors after optimization at each level 88
89 Recolorization Optimal colors Recompute voxel colors after optimization at each level Sampling Sample from keyframes only Collect, weight and filter observations 89
90 Recolorization Optimal colors Recompute voxel colors after optimization at each level Sampling Sample from keyframes only Collect, weight and filter observations Weighted average of observations: 90
91 Overview Motivation & State-of-the-art Approach Results Conclusion 91
92 Ground Truth: Geometry Frog (synthetic) Ours Fusion Ground truth 92
93 Ground Truth: Geometry Frog (synthetic) Ours Fusion Ground truth Zollhöfer et al




94 Ground Truth: Geometry Frog (synthetic) Ours Fusion Ground truth Zollhöfer et al. 15 Ours 94
95 Ground Truth: Quantitative Results Frog (synthetic) Zollhöfer et al. 15 Generated synthetic RGB-D dataset (noise on depth and camera poses) Quantitative surface accuracy evaluation Color coding: absolute distances (ground truth) 95
96 Ground Truth: Quantitative Results Frog (synthetic) Generated synthetic RGB-D dataset (noise on depth and camera poses) Quantitative surface accuracy evaluation Color coding: absolute distances (ground truth) Ours Zollhöfer et al

 Ours")
 Zollhöfer et al: 0.278mm (std.dev. 0.299mm) 20.")
97 Ground Truth: Quantitative Results Frog (synthetic) Generated synthetic RGB-D dataset (noise on depth and camera poses) Quantitative surface accuracy evaluation Color coding: absolute distances (ground truth) Ours Zollhöfer et al. 15 Mean absolute deviation: Ours: 0.222mm (std.dev mm) Zollhöfer et al: 0.278mm (std.dev mm) 20.14% more accurate 97







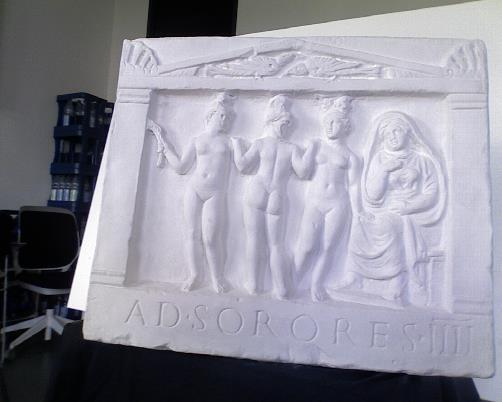
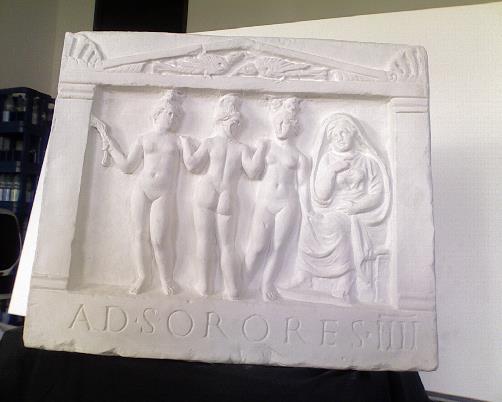
98 Qualitative Results Relief (geometry) Fusion Input Color Ours Zollhöfer et al. 15 Ours 98







99 Qualitative Results Fountain (appearance) Fusion Input Color Ours Zollhöfer et al. 15 Ours 99


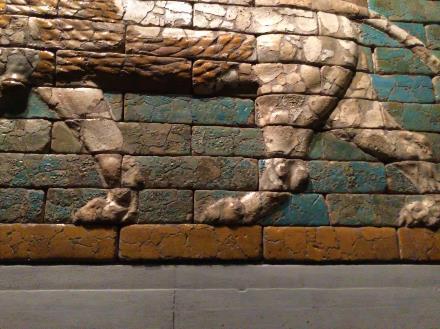







100 Qualitative Results Lion Input Color Geometry (ours) Appearance (ours) Fusion Ours Fusion Ours 100






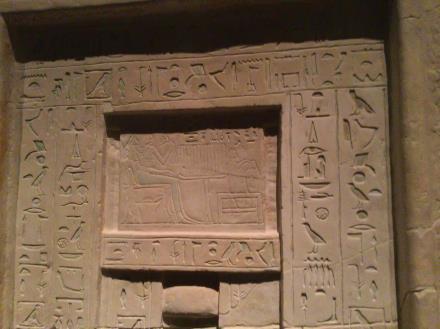
101 Qualitative Results Tomb Statuary Input Color Geometry (ours) Appearance (ours) Fusion Ours Fusion Ours 101
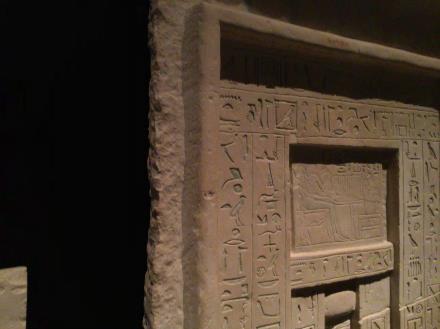





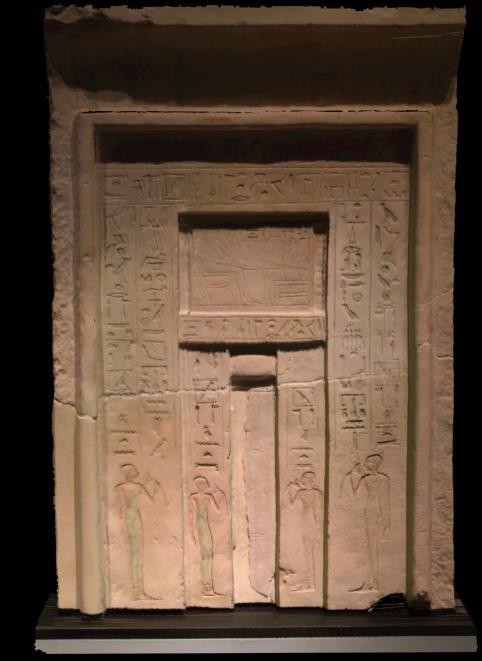







102 Qualitative Results Gate Input Color Geometry (ours) Appearance (ours) Fusion Ours Fusion Ours 102












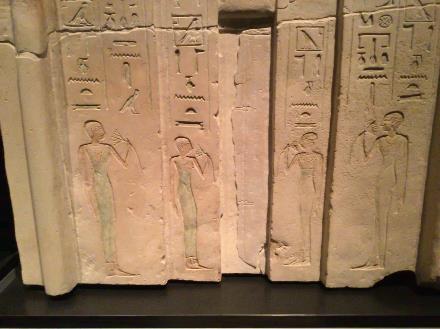
103 Qualitative Results Hieroglyphics Input Color Geometry (ours) Appearance (ours) Fusion Ours Fusion Ours 103









104 Qualitative Results Bricks Input Color Geometry (ours) Appearance (ours) Ours Fusion 104
105 Shading: Global SH vs. SVSH Fountain Luminance 105
106 Shading: Global SH vs. SVSH Fountain Luminance Albedo 106
107 Shading: Global SH vs. SVSH Fountain Global SH Luminance Shading Difference Albedo 107



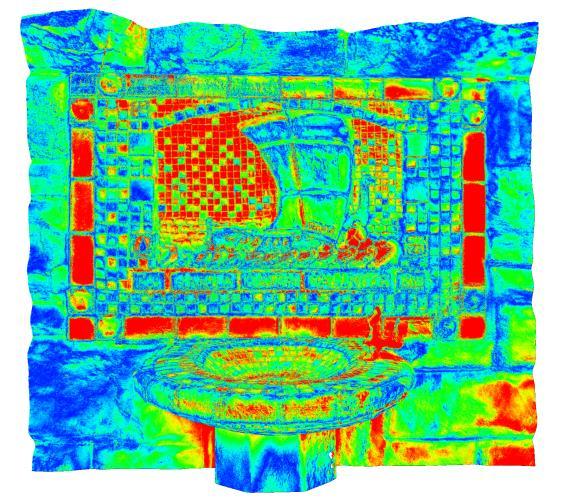


108 Shading: Global SH vs. SVSH Fountain Global SH Luminance Shading Difference SVSH Albedo Shading Difference 108
109 Overview Motivation & State-of-the-art Approach Results Conclusion 109
110 Conclusion High-Quality 3D Reconstruction of Geometry and Appearance Temporal view sampling & filtering techniques Spatially-Varying Lighting estimation Joint optimization of surface & albedo (SDF) and image formation model Optimized texture as by-product 110
111 Conclusion High-Quality 3D Reconstruction of Geometry and Appearance Temporal view sampling & filtering techniques Spatially-Varying Lighting estimation Joint optimization of surface & albedo (SDF) and image formation model Optimized texture as by-product Thank you! Questions? Robert Maier Technical University of Munich Computer Vision Group 111
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting Robert Maier 1,2 Kihwan Kim 1 Daniel Cremers 2 Jan Kautz 1 Matthias Nießner 2,3
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting Robert Maier 1,2 Kihwan Kim 1 Daniel Cremers 2 Jan Kautz 1 Matthias Nießner 2,3
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures
 Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures Robert Maier, Jörg Stückler, Daniel Cremers International Conference on 3D Vision (3DV) October 2015, Lyon, France Motivation
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures Robert Maier, Jörg Stückler, Daniel Cremers International Conference on 3D Vision (3DV) October 2015, Lyon, France Motivation
3D Reconstruction with Tango. Ivan Dryanovski, Google Inc.
 3D Reconstruction with Tango Ivan Dryanovski, Google Inc. Contents Problem statement and motivation The Tango SDK 3D reconstruction - data structures & algorithms Applications Developer tools Problem formulation
3D Reconstruction with Tango Ivan Dryanovski, Google Inc. Contents Problem statement and motivation The Tango SDK 3D reconstruction - data structures & algorithms Applications Developer tools Problem formulation
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Efficient Online Surface Correction for Real-time Large-Scale 3D Reconstruction
 MAIER ET AL.: EFFICIENT LARGE-SCALE ONLINE SURFACE CORRECTION 1 Efficient Online Surface Correction for Real-time Large-Scale 3D Reconstruction Robert Maier maierr@in.tum.de Raphael Schaller schaller@in.tum.de
MAIER ET AL.: EFFICIENT LARGE-SCALE ONLINE SURFACE CORRECTION 1 Efficient Online Surface Correction for Real-time Large-Scale 3D Reconstruction Robert Maier maierr@in.tum.de Raphael Schaller schaller@in.tum.de
Combining Depth Fusion and Photometric Stereo for Fine-Detailed 3D Models
 Combining Depth Fusion and Photometric Stereo for Fine-Detailed 3D Models Erik Bylow 1[0000 0002 6665 1637], Robert Maier 2[0000 0003 4428 1089], Fredrik Kahl 3[0000 0001 9835 3020], and Carl Olsson 1,3[0000
Combining Depth Fusion and Photometric Stereo for Fine-Detailed 3D Models Erik Bylow 1[0000 0002 6665 1637], Robert Maier 2[0000 0003 4428 1089], Fredrik Kahl 3[0000 0001 9835 3020], and Carl Olsson 1,3[0000
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Monocular Tracking and Reconstruction in Non-Rigid Environments
 Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
3D Editing System for Captured Real Scenes
 3D Editing System for Captured Real Scenes Inwoo Ha, Yong Beom Lee and James D.K. Kim Samsung Advanced Institute of Technology, Youngin, South Korea E-mail: {iw.ha, leey, jamesdk.kim}@samsung.com Tel:
3D Editing System for Captured Real Scenes Inwoo Ha, Yong Beom Lee and James D.K. Kim Samsung Advanced Institute of Technology, Youngin, South Korea E-mail: {iw.ha, leey, jamesdk.kim}@samsung.com Tel:
Colored Point Cloud Registration Revisited Supplementary Material
 Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Deep Models for 3D Reconstruction
 Deep Models for 3D Reconstruction Andreas Geiger Autonomous Vision Group, MPI for Intelligent Systems, Tübingen Computer Vision and Geometry Group, ETH Zürich October 12, 2017 Max Planck Institute for
Deep Models for 3D Reconstruction Andreas Geiger Autonomous Vision Group, MPI for Intelligent Systems, Tübingen Computer Vision and Geometry Group, ETH Zürich October 12, 2017 Max Planck Institute for
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Scanning and Printing Objects in 3D
 Scanning and Printing Objects in 3D Dr. Jürgen Sturm metaio GmbH (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects
Scanning and Printing Objects in 3D Dr. Jürgen Sturm metaio GmbH (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Computing 3D Geometry Directly From Range Images
 Computing 3D Geometry Directly From Range Images Sarah F. Frisken and Ronald N. Perry Mitsubishi Electric Research Laboratories Geometry from Range Data A Classic Approach Subject Range images Range surfaces
Computing 3D Geometry Directly From Range Images Sarah F. Frisken and Ronald N. Perry Mitsubishi Electric Research Laboratories Geometry from Range Data A Classic Approach Subject Range images Range surfaces
Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction. CVPR 2017 Tutorial Christian Häne UC Berkeley
 Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction CVPR 2017 Tutorial Christian Häne UC Berkeley Dense Multi-View Reconstruction Goal: 3D Model from Images (Depth
Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction CVPR 2017 Tutorial Christian Häne UC Berkeley Dense Multi-View Reconstruction Goal: 3D Model from Images (Depth
Outline. 1 Why we re interested in Real-Time tracking and mapping. 3 Kinect Fusion System Overview. 4 Real-time Surface Mapping
 Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction
 Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction Atul Kanaujia, CBIM, Rutgers Cristian Sminchisescu, TTI-C Dimitris Metaxas,CBIM, Rutgers 3D Human Pose Inference Difficulties Towards
Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction Atul Kanaujia, CBIM, Rutgers Cristian Sminchisescu, TTI-C Dimitris Metaxas,CBIM, Rutgers 3D Human Pose Inference Difficulties Towards
Lecture 10 Dense 3D Reconstruction
 Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Multi-View Image Coding in 3-D Space Based on 3-D Reconstruction
 Multi-View Image Coding in 3-D Space Based on 3-D Reconstruction Yongying Gao and Hayder Radha Department of Electrical and Computer Engineering, Michigan State University, East Lansing, MI 48823 email:
Multi-View Image Coding in 3-D Space Based on 3-D Reconstruction Yongying Gao and Hayder Radha Department of Electrical and Computer Engineering, Michigan State University, East Lansing, MI 48823 email:
Augmented Reality. Sung-eui Yoon
 Augmented Reality Sung-eui Yoon 1 Project Guidelines: Project Topics Any topics related to the course theme are okay You can find topics by browsing recent papers 2 Expectations Mid-term project presentation
Augmented Reality Sung-eui Yoon 1 Project Guidelines: Project Topics Any topics related to the course theme are okay You can find topics by browsing recent papers 2 Expectations Mid-term project presentation
KinectFusion: Real-Time Dense Surface Mapping and Tracking
 KinectFusion: Real-Time Dense Surface Mapping and Tracking Gabriele Bleser Thanks to Richard Newcombe for providing the ISMAR slides Overview General: scientific papers (structure, category) KinectFusion:
KinectFusion: Real-Time Dense Surface Mapping and Tracking Gabriele Bleser Thanks to Richard Newcombe for providing the ISMAR slides Overview General: scientific papers (structure, category) KinectFusion:
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Scanning and Printing Objects in 3D Jürgen Sturm
 Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Non-rigid Reconstruction with a Single Moving RGB-D Camera
 Non-rigid Reconstruction with a Single Moving RGB-D Camera Shafeeq Elanattil 1,2, Peyman Moghadam 1,2, Sridha Sridharan 2, Clinton Fookes 2, Mark Cox 1 1 Autonomous Systems Laboratory, CSIRO Data61, Brisbane,
Non-rigid Reconstruction with a Single Moving RGB-D Camera Shafeeq Elanattil 1,2, Peyman Moghadam 1,2, Sridha Sridharan 2, Clinton Fookes 2, Mark Cox 1 1 Autonomous Systems Laboratory, CSIRO Data61, Brisbane,
Modeling, Combining, and Rendering Dynamic Real-World Events From Image Sequences
 Modeling, Combining, and Rendering Dynamic Real-World Events From Image s Sundar Vedula, Peter Rander, Hideo Saito, and Takeo Kanade The Robotics Institute Carnegie Mellon University Abstract Virtualized
Modeling, Combining, and Rendering Dynamic Real-World Events From Image s Sundar Vedula, Peter Rander, Hideo Saito, and Takeo Kanade The Robotics Institute Carnegie Mellon University Abstract Virtualized
CVPR 2014 Visual SLAM Tutorial Kintinuous
 CVPR 2014 Visual SLAM Tutorial Kintinuous kaess@cmu.edu The Robotics Institute Carnegie Mellon University Recap: KinectFusion [Newcombe et al., ISMAR 2011] RGB-D camera GPU 3D/color model RGB TSDF (volumetric
CVPR 2014 Visual SLAM Tutorial Kintinuous kaess@cmu.edu The Robotics Institute Carnegie Mellon University Recap: KinectFusion [Newcombe et al., ISMAR 2011] RGB-D camera GPU 3D/color model RGB TSDF (volumetric
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza
 Davide Scaramuzza") Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Video based Animation Synthesis with the Essential Graph. Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes
 Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Signed Distance Function Representation, Tracking, and Mapping. Tanner Schmidt
 Signed Distance Function Representation, Tracking, and Mapping Tanner Schmidt Overview - Explicit and implicit surface representations SDF fusion SDF tracking Related research - KinectFusion Patch Volumes
Signed Distance Function Representation, Tracking, and Mapping Tanner Schmidt Overview - Explicit and implicit surface representations SDF fusion SDF tracking Related research - KinectFusion Patch Volumes
Robust Articulated ICP for Real-Time Hand Tracking
 Robust Articulated-ICP for Real-Time Hand Tracking Andrea Tagliasacchi* Sofien Bouaziz Matthias Schröder* Mario Botsch Anastasia Tkach Mark Pauly * equal contribution 1/36 Real-Time Tracking Setup Data
Robust Articulated-ICP for Real-Time Hand Tracking Andrea Tagliasacchi* Sofien Bouaziz Matthias Schröder* Mario Botsch Anastasia Tkach Mark Pauly * equal contribution 1/36 Real-Time Tracking Setup Data
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Dense 3D Reconstruction from Autonomous Quadrocopters
 Dense 3D Reconstruction from Autonomous Quadrocopters Computer Science & Mathematics TU Munich Martin Oswald, Jakob Engel, Christian Kerl, Frank Steinbrücker, Jan Stühmer & Jürgen Sturm Autonomous Quadrocopters
Dense 3D Reconstruction from Autonomous Quadrocopters Computer Science & Mathematics TU Munich Martin Oswald, Jakob Engel, Christian Kerl, Frank Steinbrücker, Jan Stühmer & Jürgen Sturm Autonomous Quadrocopters
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Overview of 3D Object Representations
 Overview of 3D Object Representations Thomas Funkhouser Princeton University C0S 597D, Fall 2003 3D Object Representations What makes a good 3D object representation? Stanford and Hearn & Baker 1 3D Object
Overview of 3D Object Representations Thomas Funkhouser Princeton University C0S 597D, Fall 2003 3D Object Representations What makes a good 3D object representation? Stanford and Hearn & Baker 1 3D Object
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Learning to generate 3D shapes
 Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
SPURRED by the ready availability of depth sensors and
 IEEE ROBOTICS AND AUTOMATION LETTERS. PREPRINT VERSION. ACCEPTED DECEMBER, 2015 1 Hierarchical Hashing for Efficient Integration of Depth Images Olaf Kähler, Victor Prisacariu, Julien Valentin and David
IEEE ROBOTICS AND AUTOMATION LETTERS. PREPRINT VERSION. ACCEPTED DECEMBER, 2015 1 Hierarchical Hashing for Efficient Integration of Depth Images Olaf Kähler, Victor Prisacariu, Julien Valentin and David
Multi-Volume High Resolution RGB-D Mapping with Dynamic Volume Placement. Michael Salvato
 Multi-Volume High Resolution RGB-D Mapping with Dynamic Volume Placement by Michael Salvato S.B. Massachusetts Institute of Technology (2013) Submitted to the Department of Electrical Engineering and Computer
Multi-Volume High Resolution RGB-D Mapping with Dynamic Volume Placement by Michael Salvato S.B. Massachusetts Institute of Technology (2013) Submitted to the Department of Electrical Engineering and Computer
Other Reconstruction Techniques
 Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material
 Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material Ayush Tewari 1,2 Michael Zollhöfer 1,2,3 Pablo Garrido 1,2 Florian Bernard 1,2 Hyeongwoo
Self-supervised Multi-level Face Model Learning for Monocular Reconstruction at over 250 Hz Supplemental Material Ayush Tewari 1,2 Michael Zollhöfer 1,2,3 Pablo Garrido 1,2 Florian Bernard 1,2 Hyeongwoo
Level of Details in Computer Rendering
 Level of Details in Computer Rendering Ariel Shamir Overview 1. Photo realism vs. Non photo realism (NPR) 2. Objects representations 3. Level of details Photo Realism Vs. Non Pixar Demonstrations Sketching,
Level of Details in Computer Rendering Ariel Shamir Overview 1. Photo realism vs. Non photo realism (NPR) 2. Objects representations 3. Level of details Photo Realism Vs. Non Pixar Demonstrations Sketching,
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Synthesizing Realistic Facial Expressions from Photographs
 Synthesizing Realistic Facial Expressions from Photographs 1998 F. Pighin, J Hecker, D. Lischinskiy, R. Szeliskiz and D. H. Salesin University of Washington, The Hebrew University Microsoft Research 1
Synthesizing Realistic Facial Expressions from Photographs 1998 F. Pighin, J Hecker, D. Lischinskiy, R. Szeliskiz and D. H. Salesin University of Washington, The Hebrew University Microsoft Research 1
03 - Reconstruction. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Spring 17 - Daniele Panozzo
 3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
3D Reconstruction from Multi-View Stereo: Implementation Verification via Oculus Virtual Reality
 3D Reconstruction from Multi-View Stereo: Implementation Verification via Oculus Virtual Reality Andrew Moran MIT, Class of 2014 andrewmo@mit.edu Ben Eysenbach MIT, Class of 2017 bce@mit.edu Abstract We
3D Reconstruction from Multi-View Stereo: Implementation Verification via Oculus Virtual Reality Andrew Moran MIT, Class of 2014 andrewmo@mit.edu Ben Eysenbach MIT, Class of 2017 bce@mit.edu Abstract We
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Self-supervised CNN for Unconstrained 3D Facial Performance Capture from an RGB-D Camera
 1 Self-supervised CNN for Unconstrained 3D Facial Performance Capture from an RGB-D Camera Yudong Guo, Juyong Zhang, Lin Cai, Jianfei Cai and Jianmin Zheng arxiv:1808.05323v2 [cs.cv] 17 Aug 2018 Abstract
1 Self-supervised CNN for Unconstrained 3D Facial Performance Capture from an RGB-D Camera Yudong Guo, Juyong Zhang, Lin Cai, Jianfei Cai and Jianmin Zheng arxiv:1808.05323v2 [cs.cv] 17 Aug 2018 Abstract
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Mesh from Depth Images Using GR 2 T
 Mesh from Depth Images Using GR 2 T Mairead Grogan & Rozenn Dahyot School of Computer Science and Statistics Trinity College Dublin Dublin, Ireland mgrogan@tcd.ie, Rozenn.Dahyot@tcd.ie www.scss.tcd.ie/
Mesh from Depth Images Using GR 2 T Mairead Grogan & Rozenn Dahyot School of Computer Science and Statistics Trinity College Dublin Dublin, Ireland mgrogan@tcd.ie, Rozenn.Dahyot@tcd.ie www.scss.tcd.ie/
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich. LSD-SLAM: Large-Scale Direct Monocular SLAM
 Computer Vision Group Technical University of Munich Jakob Engel LSD-SLAM: Large-Scale Direct Monocular SLAM Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich Monocular Video Engel,
Computer Vision Group Technical University of Munich Jakob Engel LSD-SLAM: Large-Scale Direct Monocular SLAM Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich Monocular Video Engel,
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
3D Shape Analysis with Multi-view Convolutional Networks. Evangelos Kalogerakis
 3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
Surface Reconstruction. Gianpaolo Palma
 Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
On-line and Off-line 3D Reconstruction for Crisis Management Applications
 On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
Outline of Presentation. Introduction to Overwatch Geospatial Software Feature Analyst and LIDAR Analyst Software
 Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond
 High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
Reconstruction of complete 3D object model from multi-view range images.
 Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Header for SPIE use Reconstruction of complete 3D object model from multi-view range images. Yi-Ping Hung *, Chu-Song Chen, Ing-Bor Hsieh, Chiou-Shann Fuh Institute of Information Science, Academia Sinica,
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Fast Guided Global Interpolation for Depth and. Yu Li, Dongbo Min, Minh N. Do, Jiangbo Lu
 Fast Guided Global Interpolation for Depth and Yu Li, Dongbo Min, Minh N. Do, Jiangbo Lu Introduction Depth upsampling and motion interpolation are often required to generate a dense, high-quality, and
Fast Guided Global Interpolation for Depth and Yu Li, Dongbo Min, Minh N. Do, Jiangbo Lu Introduction Depth upsampling and motion interpolation are often required to generate a dense, high-quality, and
Animation of 3D surfaces.
 Animation of 3D surfaces Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible =
Animation of 3D surfaces Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible =
Simultaneous Localization and Calibration: Self-Calibration of Consumer Depth Cameras
 Simultaneous Localization and Calibration: Self-Calibration of Consumer Depth Cameras Qian-Yi Zhou Vladlen Koltun Abstract We describe an approach for simultaneous localization and calibration of a stream
Simultaneous Localization and Calibration: Self-Calibration of Consumer Depth Cameras Qian-Yi Zhou Vladlen Koltun Abstract We describe an approach for simultaneous localization and calibration of a stream
Local Readjustment for High-Resolution 3D Reconstruction: Supplementary Material
 Local Readjustment for High-Resolution 3D Reconstruction: Supplementary Material Siyu Zhu 1, Tian Fang 2, Jianxiong Xiao 3, and Long Quan 4 1,2,4 The Hong Kong University of Science and Technology 3 Princeton
Local Readjustment for High-Resolution 3D Reconstruction: Supplementary Material Siyu Zhu 1, Tian Fang 2, Jianxiong Xiao 3, and Long Quan 4 1,2,4 The Hong Kong University of Science and Technology 3 Princeton
Light, Color, and Surface Reflectance. Shida Beigpour
 Light, Color, and Surface Reflectance Shida Beigpour Overview Introduction Multi-illuminant Intrinsic Image Estimation Multi-illuminant Scene Datasets Multi-illuminant Color Constancy Conclusions 2 Introduction
Light, Color, and Surface Reflectance Shida Beigpour Overview Introduction Multi-illuminant Intrinsic Image Estimation Multi-illuminant Scene Datasets Multi-illuminant Color Constancy Conclusions 2 Introduction
Real-time Geometry, Albedo and Motion Reconstruction Using a Single RGBD Camera
 Real-time Geometry, Albedo and Motion Reconstruction Using a Single RGBD Camera KAIWEN GUO and FENG XU, Tsinghua University TAO YU, Beihang University and Tsinghua University XIAOYANG LIU, QIONGHAI DAI,
Real-time Geometry, Albedo and Motion Reconstruction Using a Single RGBD Camera KAIWEN GUO and FENG XU, Tsinghua University TAO YU, Beihang University and Tsinghua University XIAOYANG LIU, QIONGHAI DAI,
Hybrid Textons: Modeling Surfaces with Reflectance and Geometry
 Hybrid Textons: Modeling Surfaces with Reflectance and Geometry Jing Wang and Kristin J. Dana Electrical and Computer Engineering Department Rutgers University Piscataway, NJ, USA {jingwang,kdana}@caip.rutgers.edu
Hybrid Textons: Modeling Surfaces with Reflectance and Geometry Jing Wang and Kristin J. Dana Electrical and Computer Engineering Department Rutgers University Piscataway, NJ, USA {jingwang,kdana}@caip.rutgers.edu
Georgios (George) Papaioannou
 Papaioannou") Georgios (George) Papaioannou Dept. of Computer Science Athens University of Economics & Business HPG 2011 Motivation Why build yet another RTGI method? Significant number of existing techniques RSM, CLPV,
Georgios (George) Papaioannou Dept. of Computer Science Athens University of Economics & Business HPG 2011 Motivation Why build yet another RTGI method? Significant number of existing techniques RSM, CLPV,
Overview. Augmented reality and applications Marker-based augmented reality. Camera model. Binary markers Textured planar markers
 Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
3D Modeling from Multiple Images
 3D Modeling from Multiple Images Wei Zhang 1,JianYao 2, and Wai-Kuen Cham 1 1 Department of Electronic Engineering, The Chinese University of Hong Kong, Shatin, N.T., Hong Kong SAR, China 2 College of
3D Modeling from Multiple Images Wei Zhang 1,JianYao 2, and Wai-Kuen Cham 1 1 Department of Electronic Engineering, The Chinese University of Hong Kong, Shatin, N.T., Hong Kong SAR, China 2 College of
VIDEO FOR VIRTUAL REALITY LIGHT FIELD BASICS JAMES TOMPKIN
 VIDEO FOR VIRTUAL REALITY LIGHT FIELD BASICS JAMES TOMPKIN WHAT IS A LIGHT FIELD? Light field seems to have turned into a catch-all term for many advanced camera/display technologies. WHAT IS A LIGHT FIELD?
VIDEO FOR VIRTUAL REALITY LIGHT FIELD BASICS JAMES TOMPKIN WHAT IS A LIGHT FIELD? Light field seems to have turned into a catch-all term for many advanced camera/display technologies. WHAT IS A LIGHT FIELD?
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Geometric Modeling. Bing-Yu Chen National Taiwan University The University of Tokyo
 Geometric Modeling Bing-Yu Chen National Taiwan University The University of Tokyo What are 3D Objects? 3D Object Representations What are 3D objects? The Graphics Process 3D Object Representations Raw
Geometric Modeling Bing-Yu Chen National Taiwan University The University of Tokyo What are 3D Objects? 3D Object Representations What are 3D objects? The Graphics Process 3D Object Representations Raw
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Dense 3D Modelling and Monocular Reconstruction of Deformable Objects
 Dense 3D Modelling and Monocular Reconstruction of Deformable Objects Anastasios (Tassos) Roussos Lecturer in Computer Science, University of Exeter Research Associate, Imperial College London Overview
Dense 3D Modelling and Monocular Reconstruction of Deformable Objects Anastasios (Tassos) Roussos Lecturer in Computer Science, University of Exeter Research Associate, Imperial College London Overview
Chapter 7. Conclusions and Future Work
 Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between