Feature-based methods for image matching
|
|
|
- Anastasia Richards
- 6 years ago
- Views:
Transcription
1 Feature-based methods for image matching Bag of Visual Words approach Feature descriptors SIFT descriptor SURF descriptor Geometric consistency check Vocabulary tree Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 1

2 A Bag of Words self-evident Liberty truths happiness endowed inalienable Creator pursuit Life Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 2
3 Representing a Text as a Bag of Words We hold these truths to be self-evident, that all men are created equal, that they are endowed by their Creator with certain unalienable Rights, that among these are Life, Liberty and the pursuit of Happiness. That to secure these rights, Governments are instituted among Men, deriving their just powers from the consent of the governed, That whenever any Form of Government becomes destructive of these ends, it is the Right of the People to alter or to abolish it, and to institute new Government, laying its foundation on such principles and organizing its powers in such form, as to them shall seem most likely to effect their Safety and Happiness. Prudence, indeed, will dictate that Governments long established should not be changed for light and transient causes; and accordingly all experience hath shewn, that mankind are more disposed to suffer, while evils are sufferable, than to right themselves by abolishing the forms to which they are accustomed. But when a long train of abuses and usurpations, pursuing invariably the same Object evinces a design to reduce them under absolute Despotism, it is their right, it is their duty, to throw off such Government, and to provide new Guards for their future security. self-evident Liberty truths happiness endowed inalienable Creator pursuit Life Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 3


4 Representing an Image as a Bag of Visual Words Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 4

5 Feature descriptors Represent local pattern around a keypoint by a vector ( feature descriptor ) Establish feature correspondences by finding the nearest neighbor in descriptor space Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 5

6 Scale/rotation invariant feature descriptors Scale invariance: extract features at scale provided by keypoint detection Rotation invariance: Detect dominant orientation Average gradient direction Peak detection in gradient direction histogram Rotate coordinate system to dominant orientation Multiple strong orientation peaks: generate second feature point Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 6
![SIFT descriptors SIFT - Scale-Invariant Feature Transform [Lowe,1999, 2004] Sample thresholded image gradients at 16x16 locations in scale space (in local coordinate system for rotation and scale](/docs-images/75/72957630/images/7-0.jpg "invariance) For each of 4x4 subregion, generate orientation histogram with 8 directions each; each observation weighted with magnitude of image gradient and a window function 128-dimensional feature")
7 SIFT descriptors SIFT - Scale-Invariant Feature Transform [Lowe,1999, 2004] Sample thresholded image gradients at 16x16 locations in scale space (in local coordinate system for rotation and scale invariance) For each of 4x4 subregion, generate orientation histogram with 8 directions each; each observation weighted with magnitude of image gradient and a window function 128-dimensional feature vector Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 7
![SURF descriptors n SURF Speeded Up Robust Features [Bay et al. 2006]!](/docs-images/75/72957630/images/8-0.jpg "n n n Compute horizontal and vertical pixel differences, dx, dy (in local coordinate system for rotation and scale invariance, window size 20σ x 20σ, where σ 2 is feature scale) Sum dx, dy, and dx,")
8 SURF descriptors n SURF Speeded Up Robust Features [Bay et al. 2006]! n n n Compute horizontal and vertical pixel differences, dx, dy (in local coordinate system for rotation and scale invariance, window size 20σ x 20σ, where σ 2 is feature scale) Sum dx, dy, and dx, dy over 4x4 subregions (SURF-64) or 3x3 subregions (SURF-36)" Normalize vector for gain invariance, but distinguish bright blobs and dark blobs based on sign of Laplacian (trace of Hessian matrix)" Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 8


9 Computing feature descriptors Gray" D xx D xy D xx D yy - (0.9D xy ) 2 D yy Filters" Blob Response" Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 9
 2 D yy Filters\" Blob Response\" Digital Image Processing: Bernd Girod, 2013 Stanford")
10 Computing feature descriptors Gray" D xx D xy D xx D yy - (0.9D xy ) 2 D yy Filters" Blob Response" Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 10
11 Computing feature descriptors Gray" D xx D xy D xx D yy - (0.9D xy ) 2 D yy Filters" Blob Response" Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 11
2 Dyy Filters\" Digital Image Processing: Bernd Girod, 2013 Stanford University")
12 Computing feature descriptors Gray" Dxx Dxy DxxDyy(0.9Dxy)2 Dyy Filters" Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 12 Blob Response"

13 Computing feature descriptors Maxima" y" x" Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 13

14 Computing feature descriptors Orient Along " Dominant Gradient" Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 14 Gradient Field for Oriented Patch"


15 Computing feature descriptors SURF Descriptor" Σ d x Σ d y Σ d x Σ d y Σ d x Σ d y Σ d x Σ d y " SIFT Descriptor" Σ Σ Σ Σ Σ Σ Σ Σ " d y d x Σ d x Σ d y Σ d x Σ d y Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 15











16 Bag of Visual Words Matching Pairwise Comparison Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 10
17 Geometric mapping Notation: Homogeneous coordinates; reference image x = x y 1 Inhomogeneous coordinates; target image x = x y Translation ( ) T ( ) T Euclidean transformation (rotation and translation) cosθ sinθ tx x= sinθ cosθ t x y Scaled rotation (similarity transform) s cosθ s sinθ tx x= s sinθ s cosθ t x y Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 12
18 Geometric mapping Affine transformation a00 a01 a02 x= a10 a11 a x 12 Motion of planar surface in 3d under orthographic projection Parallel lines are preserved Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 13

19 Geometric mapping Motion of planar surface in 3d under perspective projection Homography x Inhomogeneous coordinates (after normalization) Straight lines are preserved h h h h h h h h h x h x+ h y+ h h x+ h y+ h x = y = h x+ h y+ h h x+ h y+ h Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 14
![RANSAC RANdom Sample Consensus [Fischer, Bolles, 1981] Randomly select subset of k correspondences Compute geometric mapping parameters by linear regression Apply geometric mapping to all keypoints](/docs-images/75/72957630/images/20-1.jpg "Count no. of inliers (closer than from the corresponding keypoint, typical = 1 3 pixels) Repeat process S times, keep geometric maping with largest no.")
20 RANSAC RANdom Sample Consensus [Fischer, Bolles, 1981] Randomly select subset of k correspondences Compute geometric mapping parameters by linear regression Apply geometric mapping to all keypoints Count no. of inliers (closer than from the corresponding keypoint, typical = 1 3 pixels) Repeat process S times, keep geometric maping with largest no. of inliers Required number of trials Total probability of success Probability of valid correspondence Use small number of correspondences Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 15
21 RANSAC with Affine Model Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 16

22 RANSAC with Homography Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 17



23 SURF features & affine RANSAC Pairwise Comparison Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 18
24 Comparing Feature Histograms Speed up by comparing histograms of features: pairwise image comparison only for similar histograms Histogram intersection Query histogram Histogram of database entry ρ = n min( Q i, D i ) i=1 n D i=1 i [Swain, Ballard 1991] Equivalent to mean absolute difference, if both histograms contain same number of samples Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 20

25 Growing Vocabulary Tree Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 21 [Nistér and Stewenius, 2006]
26 Growing Vocabulary Tree Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 22 [Nistér and Stewenius, 2006]
27 Growing Vocabulary Tree Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 23 [Nistér and Stewenius, 2006]
28 Growing Vocabulary Tree k = 3 Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 24 [Nistér and Stewenius, 2006]
29 Growing Vocabulary Tree k = 3 Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 25 [Nistér and Stewenius, 2006]




30 Querying Vocabulary Tree Query Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 26
31 Querying: Hard Binning vs. Soft Binning node 1 node 1 d 1 d 1 node 2 query descriptor d d 3 2 node 3 node 2 query d d 3 2 node 3 Hard Binning [Nistér and Stewenius, CVPR 2006] Soft Binning [Philbin et al., CVPR 2008] Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 27

32 Stanford Mobile Visual Search Dataset Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 28

33 Stanford Mobile Visual Search Dataset Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 29
34 Querying: Hard Binning vs. Soft Binning SURF features 6-level tree 1M leaf nodes 3269 query images 100 top tree results Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 30


35 Digital Image Processing: Bernd Girod, 2013 Stanford University -- Image Matching 31
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: Scale Invariant Feature Transform
 1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Keypoint detection. (image registration, panorama stitching, motion estimation + tracking, recognition )
") Keypoint detection n n Many applications benefit from features localized in (x,y) (image registration, panorama stitching, motion estimation + tracking, recognition ) Edges well localized only in one direction
Keypoint detection n n Many applications benefit from features localized in (x,y) (image registration, panorama stitching, motion estimation + tracking, recognition ) Edges well localized only in one direction
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
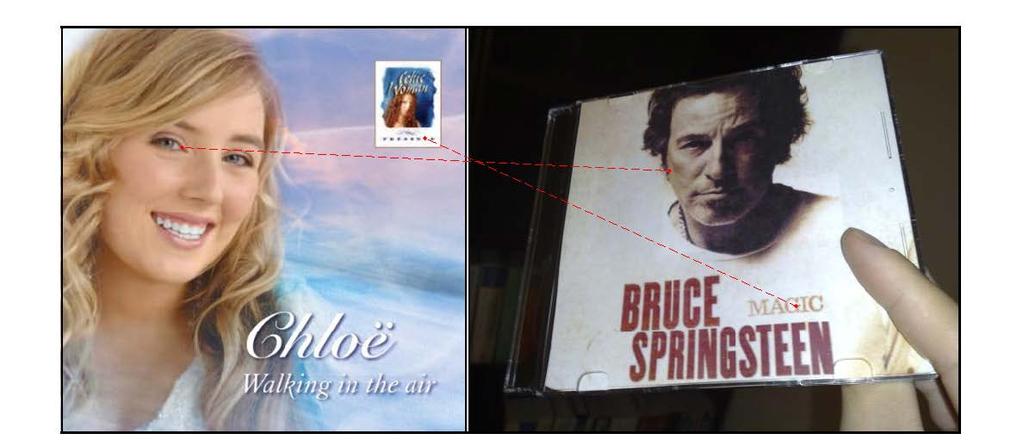
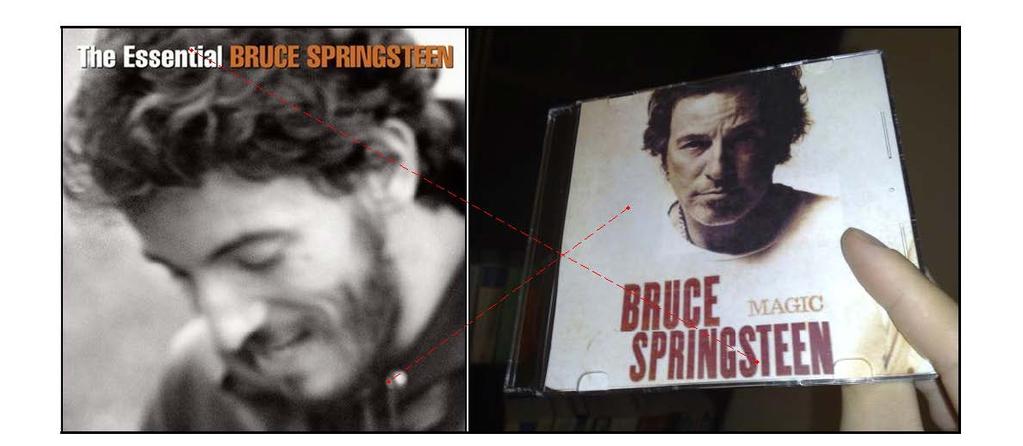
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
Scott Smith Advanced Image Processing March 15, Speeded-Up Robust Features SURF
 Scott Smith Advanced Image Processing March 15, 2011 Speeded-Up Robust Features SURF Overview Why SURF? How SURF works Feature detection Scale Space Rotational invariance Feature vectors SURF vs Sift Assumptions
Scott Smith Advanced Image Processing March 15, 2011 Speeded-Up Robust Features SURF Overview Why SURF? How SURF works Feature detection Scale Space Rotational invariance Feature vectors SURF vs Sift Assumptions
Comparison of Feature Detection and Matching Approaches: SIFT and SURF
 GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
Obtaining Feature Correspondences
 Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Implementing the Scale Invariant Feature Transform(SIFT) Method
 Method") Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Implementation and Comparison of Feature Detection Methods in Image Mosaicing
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Multi-modal Registration of Visual Data. Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy
 Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
3D Object Recognition using Multiclass SVM-KNN
 3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Perception IV: Place Recognition, Line Extraction
 Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Stitching and Blending
 Stitching and Blending Kari Pulli VP Computational Imaging Light First project Build your own (basic) programs panorama HDR (really, exposure fusion) The key components register images so their features
Stitching and Blending Kari Pulli VP Computational Imaging Light First project Build your own (basic) programs panorama HDR (really, exposure fusion) The key components register images so their features
Edge detection. Gradient-based edge operators
 Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Feature Detection and Matching
 and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Key properties of local features
 Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Lecture 24: Parallel Databases. Wednesday, November 24, 2010
 Lecture 24: Parallel Databases Wednesday, November 24, 2010 1 Overview Parallel architectures and operators: Ch. 20.1 Map- reduce: Ch. 20.2 Semijoin reducgons, full reducers: Ch. 20.4 We covered this a
Lecture 24: Parallel Databases Wednesday, November 24, 2010 1 Overview Parallel architectures and operators: Ch. 20.1 Map- reduce: Ch. 20.2 Semijoin reducgons, full reducers: Ch. 20.4 We covered this a
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM INTRODUCTION
 A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
EE368/CS232 Digital Image Processing Winter
 EE368/CS232 Digital Image Processing Winter 207-208 Lecture Review and Quizzes (Due: Wednesday, February 28, :30pm) Please review what you have learned in class and then complete the online quiz questions
EE368/CS232 Digital Image Processing Winter 207-208 Lecture Review and Quizzes (Due: Wednesday, February 28, :30pm) Please review what you have learned in class and then complete the online quiz questions
CS 231A Computer Vision (Winter 2018) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
Keypoint-based Recognition and Object Search
 03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Requirements for region detection
 Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Image Features. Work on project 1. All is Vanity, by C. Allan Gilbert,
 Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Image Stitching. Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi
 Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza http://rpg.ifi.uzh.ch/ 1 Lab exercise today replaced by Deep Learning Tutorial by Antonio Loquercio Room
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza http://rpg.ifi.uzh.ch/ 1 Lab exercise today replaced by Deep Learning Tutorial by Antonio Loquercio Room
3D Environment Reconstruction
 3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
3D Environment Reconstruction Using Modified Color ICP Algorithm by Fusion of a Camera and a 3D Laser Range Finder The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15,
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Indexing local features and instance recognition May 14 th, 2015
 Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
Local Patch Descriptors
 Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
From Pixels to Information Recent Advances in Visual Search
 From Pixels to Information Recent Advances in Visual Search Bernd Girod Stanford University bgirod@stanford.edu Augmented Reality 3 Augmented Reality 2014 2012 2015 4 Future: Smart Contact Lenses Sight:
From Pixels to Information Recent Advances in Visual Search Bernd Girod Stanford University bgirod@stanford.edu Augmented Reality 3 Augmented Reality 2014 2012 2015 4 Future: Smart Contact Lenses Sight:
Object Detection by Point Feature Matching using Matlab
 Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Modern-era mobile phones and tablets
 Anthony Vetro Mitsubishi Electric Research Labs Mobile Visual Search: Architectures, Technologies, and the Emerging MPEG Standard Bernd Girod and Vijay Chandrasekhar Stanford University Radek Grzeszczuk
Anthony Vetro Mitsubishi Electric Research Labs Mobile Visual Search: Architectures, Technologies, and the Emerging MPEG Standard Bernd Girod and Vijay Chandrasekhar Stanford University Radek Grzeszczuk
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
CS101 Lecture 12: Image Compression. What You ll Learn Today
 CS101 Lecture 12: Image Compression Vector Graphics Compression Techniques Aaron Stevens (azs@bu.edu) 11 October 2012 What You ll Learn Today Review: how big are image files? How can we make image files
CS101 Lecture 12: Image Compression Vector Graphics Compression Techniques Aaron Stevens (azs@bu.edu) 11 October 2012 What You ll Learn Today Review: how big are image files? How can we make image files
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
RANSAC and some HOUGH transform
 RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
3D Visualization through Planar Pattern Based Augmented Reality
 NATIONAL TECHNICAL UNIVERSITY OF ATHENS SCHOOL OF RURAL AND SURVEYING ENGINEERS DEPARTMENT OF TOPOGRAPHY LABORATORY OF PHOTOGRAMMETRY 3D Visualization through Planar Pattern Based Augmented Reality Dr.
NATIONAL TECHNICAL UNIVERSITY OF ATHENS SCHOOL OF RURAL AND SURVEYING ENGINEERS DEPARTMENT OF TOPOGRAPHY LABORATORY OF PHOTOGRAMMETRY 3D Visualization through Planar Pattern Based Augmented Reality Dr.
Faster-than-SIFT Object Detection
 Faster-than-SIFT Object Detection Borja Peleato and Matt Jones peleato@stanford.edu, mkjones@cs.stanford.edu March 14, 2009 1 Introduction As computers become more powerful and video processing schemes
Faster-than-SIFT Object Detection Borja Peleato and Matt Jones peleato@stanford.edu, mkjones@cs.stanford.edu March 14, 2009 1 Introduction As computers become more powerful and video processing schemes
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Hough Transform and RANSAC
 CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
Viewpoint Invariant Features from Single Images Using 3D Geometry
 Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
A Comparison of SIFT and SURF
 A Comparison of SIFT and SURF P M Panchal 1, S R Panchal 2, S K Shah 3 PG Student, Department of Electronics & Communication Engineering, SVIT, Vasad-388306, India 1 Research Scholar, Department of Electronics
A Comparison of SIFT and SURF P M Panchal 1, S R Panchal 2, S K Shah 3 PG Student, Department of Electronics & Communication Engineering, SVIT, Vasad-388306, India 1 Research Scholar, Department of Electronics
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Lecture 12 Recognition. Davide Scaramuzza
 Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
K-Means Based Matching Algorithm for Multi-Resolution Feature Descriptors
 K-Means Based Matching Algorithm for Multi-Resolution Feature Descriptors Shao-Tzu Huang, Chen-Chien Hsu, Wei-Yen Wang International Science Index, Electrical and Computer Engineering waset.org/publication/0007607
K-Means Based Matching Algorithm for Multi-Resolution Feature Descriptors Shao-Tzu Huang, Chen-Chien Hsu, Wei-Yen Wang International Science Index, Electrical and Computer Engineering waset.org/publication/0007607
Pictures at an Exhibition
 Pictures at an Exhibition Han-I Su Department of Electrical Engineering Stanford University, CA, 94305 Abstract We employ an image identification algorithm for interactive museum guide with pictures taken
Pictures at an Exhibition Han-I Su Department of Electrical Engineering Stanford University, CA, 94305 Abstract We employ an image identification algorithm for interactive museum guide with pictures taken
Visual Odometry. Features, Tracking, Essential Matrix, and RANSAC. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
Automatic Panoramic Image Stitching. Dr. Matthew Brown, University of Bath
 Automatic Panoramic Image Stitching Dr. Matthew Brown, University of Bath Automatic 2D Stitching The old days: panoramic stitchers were limited to a 1-D sweep 2005: 2-D stitchers use object recognition
Automatic Panoramic Image Stitching Dr. Matthew Brown, University of Bath Automatic 2D Stitching The old days: panoramic stitchers were limited to a 1-D sweep 2005: 2-D stitchers use object recognition
Eppur si muove ( And yet it moves )
") Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
A Novel Algorithm for Color Image matching using Wavelet-SIFT
 International Journal of Scientific and Research Publications, Volume 5, Issue 1, January 2015 1 A Novel Algorithm for Color Image matching using Wavelet-SIFT Mupuri Prasanth Babu *, P. Ravi Shankar **
International Journal of Scientific and Research Publications, Volume 5, Issue 1, January 2015 1 A Novel Algorithm for Color Image matching using Wavelet-SIFT Mupuri Prasanth Babu *, P. Ravi Shankar **