A MSC Adams-Marc-EDEM Co-Simulation Framework
|
|
|
- Oswald Bates
- 6 years ago
- Views:
Transcription

1 A MSC Adams-Marc-EDEM Co-Simulation Framework Jose L. Ortiz, PhD MAGIC 2015, Madison, WI
2 Contents MSC Adams Approach to Multi-Physics Native Embedded Co-Simulation Chain simulations Co-Simulation Overview Q&A 2
3 MSC Adams Approach to Multi-Physics Three approaches: Native implementation of FEA Adams assembles the equations, Adams solves all equations. Embedded implementation of FEA FEA code assembles equations of a subsystem, Adams solves all equations. Co-simulation FEA code solves its equations, Adams solves its equations. Chain simulations Adams exports a FEA dataset 3
4 MSC Adams Approach to Multi-Physics Native implementation of FEA Distributed mass beam elements (ANCF based) Geometrically nonlinear formulation Curved isoparametric Variable cross section Contact support Expression based distributed loads Full support in dataset language In the development pipeline we have shells/plates and solid ANCF based elements, material nonlinearities. 4

5 MSC Adams Approach to Multi-Physics Native implementation of FEA 5

6 MSC Adams Approach to Multi-Physics Native implementation of FEA 6
7 MSC Adams Approach to Multi-Physics Embedded implementation of FEA Support for SOL400 (nonlinear) Distributed solution Extension of existing FLEX_BODY object. Labelled MaxFlex Full support in dataset language Contact support programmed for v

8 MSC Adams Approach to Multi-Physics Embedded implementation of FEA 8
9 MSC Adams Approach to Multi-Physics Embedded implementation of FEA 9
10 MSC Adams Approach to Multi-Physics Co-Simulation Not FMI based Algorithm base on work by Elliot et al. (2000) Adams Co-Simulation Interface (ACSI) released 2014 Extensible architecture Distributed parallel Version 2014 support for MSC Marc Version 2015 support for MSC Marc and stiffness matrix Version 2016 support for EDEM (Alpha version available now) 10

11 MSC Adams Approach to Multi-Physics Co-Simulation 11

12 MSC Adams Approach to Multi-Physics Co-Simulation 12

13 MSC Adams Approach to Multi-Physics Co-Simulation 13

14 MSC Adams Approach to Multi-Physics Co-Simulation 14

15 MSC Adams Approach to Multi-Physics Co-Simulation 15

16 MSC Adams Approach to Multi-Physics Co-Simulation 16

17 MSC Adams Approach to Multi-Physics Co-Simulation 17

18 MSC Adams Approach to Multi-Physics Co-Simulation 18
19 MSC Adams Approach to Multi-Physics Chain simulations Export a fully editable MSC Nastran model Not a dataset translation High fidelity, eigenvalues computed in Adams match eigenvalues computed in Nastran 19


20 MSC Adams Approach to Multi-Physics Chain simulations 20
21 MSC Adams Approach to Multi-Physics Chain simulations Chassis - Frequency error vs. Mode number % Error Mode number 21
22 Co-Simulation Overview 2014 First release of Adams Co-Simulation Interface (ACSI) Support for MSC Marc only 2015 Enhanced support for MSC Marc Support for stiffness matrix exchange 2016 Enhanced support for EDEM (DEM Solutions, UK) Alpha version available now 22

23 Co-Simulation Overview Co-simulation setup Assume fixed joint between Adams and other codes Adams Other code Fixed Joints 23
24 Co-Simulation Overview Co-simulation setup Extrapolated force values acting on Adams F i F j 24
 [ Kij")
25 Co-Simulation Overview Co-simulation setup Other code provides a tangent stiffness matrix to Adams (EDEM passes a zero matrix) [ Kij ] 25


 f ( t) i 0 j")
26 Co-Simulation Overview Co-simulation setup Prescribed motion on the controlled surfaces/nodes on other code i ( u) f ( t) i 0 j ( u) f ( t) j 0 26
 (b)")
27 Co-Simulation Overview Variable communication step MBD model always goes first Each code takes a step using its best settings (a) (b) 27

28 Co-Simulation Overview Impact lower control arm 28


29 Co-Simulation Overview Crankshaft torque modulator 29

30 Co-Simulation Overview Crankshaft torque modulator Comparison Marc-only vs Co-Simulation 30

31 Co-Simulation Overview Battery housing damage 31
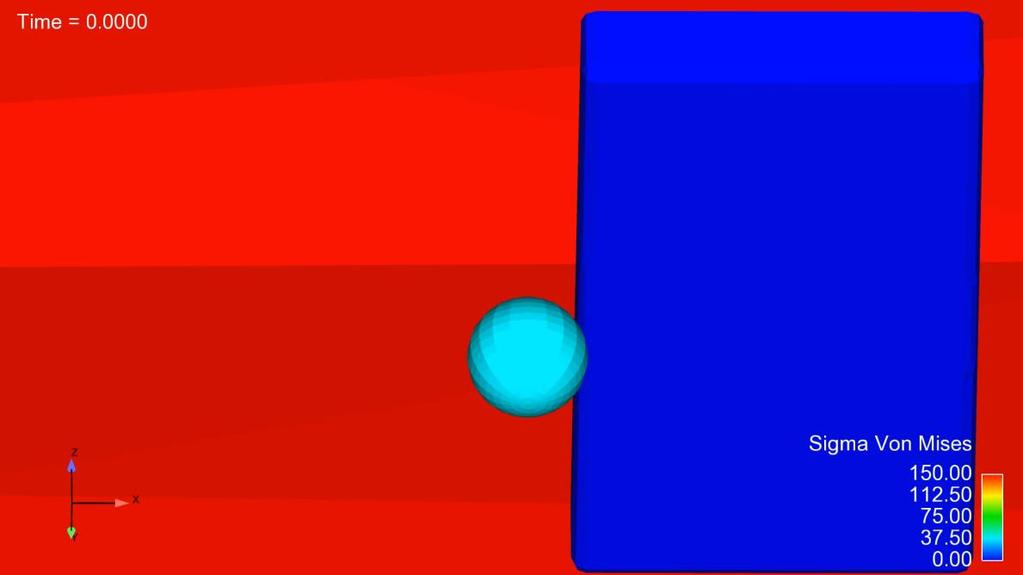
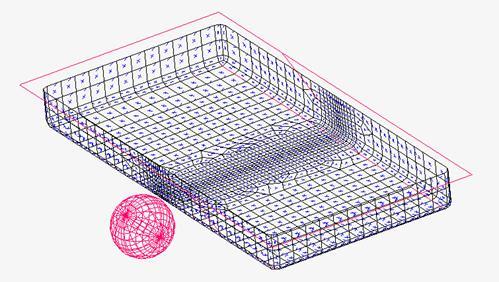
32 Co-Simulation Overview Battery housing damage 32
33 Co-Simulation Overview Advantages No limitations in Adams model Some limitations in other codes Multi-physics support in MSC Marc models Parallel computation of other codes Support for different units and reference frames TCP/IP Dynamic, static and quasi-static simulations 33
34 Co-Simulation Overview Usage User instruments the models Easy to follow instructions User writes a configuration script to define Model topology (interactions between codes) Units for each code Relative location of reference frames Model specific parameters IP location of servers Interpolation/extrapolation algorithms User launches the master code (a.k.a. glue code) Glue code prompts the user to launch the co-simulating codes. 34
35 Co-Simulation Overview Configuration script example # # Example of Adams, Marc and EDEM # cosim_ip = end_time =
36 Co-Simulation Overview Configuration script example (cont.) # Adams process process { id = 99 name = Rigid parts and springs code = adams interaction { name = gforce1 connection = Box gforce_id = 1 } 36
37 Co-Simulation Overview Configuration script example (cont.) # Marc process process { id = 3 name = Intermediate block code = marc interaction { name = Left_node connection = GFORCE_2 node_id = 1332 } 37
38 Co-Simulation Overview Configuration script example (cont.) # EDEM process process { code = edem name = Box id = 50 ip_address = } interaction { name = Box connection = gforce1 geometry_name = Box } 38
39 Co-Simulation Overview Limitations No inertia effects from other model accounted for in Adams model No simulation step rejection in the other codes Interaction points are fixed joints Only one Adams model is supported Results are visualized independently or by CEI Insight 39
40 Co-Simulation Overview Future development The ACSI (Adams Co-Simulation Interface) is an extensible framework As of 2016 it does not have a plug-in architecture In the development pipeline we plan extensions to: Chrono:: SOL700 (MSC Dytran) Custom codes 40
41 Q&A 41
Introduction to Adams/Solver C++ Jose L Ortiz, PhD. Adams User Meeting Munich - May 18, 2011
 Introduction to Adams/Solver C++ Jose L Ortiz, PhD. Adams User Meeting Munich - May 18, 2011 Agenda A Brief History of Adams/Solver C++ Advantages and Disadvantages of Adams/Solver C++ Side-to-side C++/FORTRAN
Introduction to Adams/Solver C++ Jose L Ortiz, PhD. Adams User Meeting Munich - May 18, 2011 Agenda A Brief History of Adams/Solver C++ Advantages and Disadvantages of Adams/Solver C++ Side-to-side C++/FORTRAN
Flexible Body Suspension System Modeling and Simulation Using MD Nastran SOL700 in VPG Environment
 9 th International LS-DYNA Users Conference Crash/Safety (4) Flexible Body Suspension System Modeling and Simulation Using SOL700 in VPG Environment Casey Heydari, Ted Pawela MSC.Software Corporation Santa
9 th International LS-DYNA Users Conference Crash/Safety (4) Flexible Body Suspension System Modeling and Simulation Using SOL700 in VPG Environment Casey Heydari, Ted Pawela MSC.Software Corporation Santa
Week 12 - Lecture Mechanical Event Simulation. ME Introduction to CAD/CAE Tools
 Week 12 - Lecture Mechanical Event Simulation Lecture Topics Mechanical Event Simulation Overview Additional Element Types Joint Component Description General Constraint Refresh Mesh Control Force Estimation
Week 12 - Lecture Mechanical Event Simulation Lecture Topics Mechanical Event Simulation Overview Additional Element Types Joint Component Description General Constraint Refresh Mesh Control Force Estimation
Flexible Body Suspension System Modeling and Simulation Using MD Nastran SOL700 in VPG Environment
 Flexible Body Suspension System Modeling and Simulation Using MD Nastran SOL700 in VPG Environment Casey Heydari, Ted Pawela MSC.Software Corporation Santa Ana, California Tim Palmer, Arthur Tang Engineering
Flexible Body Suspension System Modeling and Simulation Using MD Nastran SOL700 in VPG Environment Casey Heydari, Ted Pawela MSC.Software Corporation Santa Ana, California Tim Palmer, Arthur Tang Engineering
Using RecurDyn. Contents
 Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
SAMCEF MECANO FlexDyn: Market analysis
 SAMCEF MECANO FlexDyn: Market analysis Sebastien GOHY 1 - ASD Competence Center - 2011 SAMCEF Mecano Flexdyn: Market analysis SAMCEF Mecano: Reminder Mecano Structure Classical NL FEM Cf Abaqus, MSC Marc
SAMCEF MECANO FlexDyn: Market analysis Sebastien GOHY 1 - ASD Competence Center - 2011 SAMCEF Mecano Flexdyn: Market analysis SAMCEF Mecano: Reminder Mecano Structure Classical NL FEM Cf Abaqus, MSC Marc
FEM (MSC.Nastran SOL600) and Multibody (MSC.Adams flexible contact) solutions: an application example in helicopter rotor analysis
 and Multibody (MSC.Adams flexible contact) solutions: an application example in helicopter rotor analysis") FEM (MSC.Nastran SOL6) and Multibody (MSC.Adams flexible contact) solutions: an application example in helicopter rotor analysis Daniele Catelani MSC. Software - EMEA Aerospace Consultant Francesca Bianchi
FEM (MSC.Nastran SOL6) and Multibody (MSC.Adams flexible contact) solutions: an application example in helicopter rotor analysis Daniele Catelani MSC. Software - EMEA Aerospace Consultant Francesca Bianchi
LS-DYNA s Linear Solver Development Phase1: Element Validation Part II
 LS-DYNA s Linear Solver Development Phase1: Element Validation Part II Allen T. Li 1, Zhe Cui 2, Yun Huang 2 1 Ford Motor Company 2 Livermore Software Technology Corporation Abstract This paper continues
LS-DYNA s Linear Solver Development Phase1: Element Validation Part II Allen T. Li 1, Zhe Cui 2, Yun Huang 2 1 Ford Motor Company 2 Livermore Software Technology Corporation Abstract This paper continues
Support for Multi physics in Chrono
 Support for Multi physics in Chrono The Story Ahead Overview of multi physics strategy in Chrono Summary of handling rigid/flexible body dynamics using Lagrangian approach Summary of handling fluid, and
Support for Multi physics in Chrono The Story Ahead Overview of multi physics strategy in Chrono Summary of handling rigid/flexible body dynamics using Lagrangian approach Summary of handling fluid, and
The concise guide to Nastran Rigid Elements
 The concise guide to Nastran Rigid Elements The Nastran group of elements often described as the "Rigid elements" are very useful engineering analysis tools. "Rigid Element" is a slight misnomer, but the
The concise guide to Nastran Rigid Elements The Nastran group of elements often described as the "Rigid elements" are very useful engineering analysis tools. "Rigid Element" is a slight misnomer, but the
VD - Design Validation
 Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2017 295 - EEBE - Barcelona East School of Engineering 717 - EGE - Department of Engineering Presentation BACHELOR'S DEGREE IN ELECTRICAL
Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2017 295 - EEBE - Barcelona East School of Engineering 717 - EGE - Department of Engineering Presentation BACHELOR'S DEGREE IN ELECTRICAL
Recent developments in simulation, optimization and control of flexible multibody systems
 Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
course outline basic principles of numerical analysis, intro FEM
 idealization, equilibrium, solutions, interpretation of results types of numerical engineering problems continuous vs discrete systems direct stiffness approach differential & variational formulation introduction
idealization, equilibrium, solutions, interpretation of results types of numerical engineering problems continuous vs discrete systems direct stiffness approach differential & variational formulation introduction
Project Chrono. Overview, structure, capabilities
 Project Chrono Overview, structure, capabilities Project Chrono Growing ecosystem of software tools Multi physics simulation engine Open source, released under permissive BSD 3 license Provides support
Project Chrono Overview, structure, capabilities Project Chrono Growing ecosystem of software tools Multi physics simulation engine Open source, released under permissive BSD 3 license Provides support
NUMERICAL COUPLING BETWEEN DEM (DISCRETE ELEMENT METHOD) AND FEA (FINITE ELEMENTS ANALYSIS).
 AND FEA (FINITE ELEMENTS ANALYSIS).") NUMERICAL COUPLING BETWEEN DEM (DISCRETE ELEMENT METHOD) AND FEA (FINITE ELEMENTS ANALYSIS). Daniel Schiochet Nasato - ESSS Prof. Dr. José Roberto Nunhez Unicamp Dr. Nicolas Spogis - ESSS Fabiano Nunes
NUMERICAL COUPLING BETWEEN DEM (DISCRETE ELEMENT METHOD) AND FEA (FINITE ELEMENTS ANALYSIS). Daniel Schiochet Nasato - ESSS Prof. Dr. José Roberto Nunhez Unicamp Dr. Nicolas Spogis - ESSS Fabiano Nunes
LMS Virtual.Lab The Unified Environment for Functional Performance Engineering
 LMS Virtual.Lab The Unified Environment for Functional Performance Engineering LMS Imagine.Lab LMS OPTIMUS LMS Engineering and Deployment Services Technology Transfer Process Transformation & Best Practices
LMS Virtual.Lab The Unified Environment for Functional Performance Engineering LMS Imagine.Lab LMS OPTIMUS LMS Engineering and Deployment Services Technology Transfer Process Transformation & Best Practices
Engineering Center Steyr GmbH & Co KG Adams User Meeting 2011 Hocheffiziente Berücksichtigung des Fügestellenkontaktes von FEM-Modellen in Adams
 Engineering Center Steyr GmbH & Co KG Adams User Meeting 2011 Hocheffiziente Berücksichtigung des Fügestellenkontaktes von FEM-Modellen in Adams M. Breitfuss 19.05.2011 Joints everywhere? How to handle
Engineering Center Steyr GmbH & Co KG Adams User Meeting 2011 Hocheffiziente Berücksichtigung des Fügestellenkontaktes von FEM-Modellen in Adams M. Breitfuss 19.05.2011 Joints everywhere? How to handle
Modeling Bolted Connections. Marilyn Tomlin CAE COE / Siemens Corporation
 Modeling Bolted Connections Marilyn Tomlin CAE COE / Siemens Corporation Overview Bolted Connection Engineering Judgment Modeling Options Summary Typical Bolted Connection Gasket Bolt Nut Washer Technology
Modeling Bolted Connections Marilyn Tomlin CAE COE / Siemens Corporation Overview Bolted Connection Engineering Judgment Modeling Options Summary Typical Bolted Connection Gasket Bolt Nut Washer Technology
SIMPACKS s FEA Interface New Features in 8.5 and Further Development. Stefan Dietz, INTEC GmbH
 SIMPACKS s FEA Interface New Features in 8.5 and Further Development Stefan Dietz, INTEC GmbH Contents New Features in 8.5 integration into SIMPACK GUI generalised file interface between FE-codes and SIMPACK
SIMPACKS s FEA Interface New Features in 8.5 and Further Development Stefan Dietz, INTEC GmbH Contents New Features in 8.5 integration into SIMPACK GUI generalised file interface between FE-codes and SIMPACK
Introducing Adams/Machinery
 Introducing Adams/Machinery A Powerful Simulation Suite for Mechanical Drive Systems Adams/Machinery is a new Adams software solution that allows engineers to efficiently build functional virtual prototypes
Introducing Adams/Machinery A Powerful Simulation Suite for Mechanical Drive Systems Adams/Machinery is a new Adams software solution that allows engineers to efficiently build functional virtual prototypes
Guidelines for proper use of Plate elements
 Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Pointing Accuracy Analysis for a Commander s Independent Weapon Station Demonstrator
 BAE Systems Platforms & Services Pointing Accuracy Analysis for a Commander s Independent Weapon Station Demonstrator April 22, 2015 Dirk Jungquist Dan Youtt 22 April 2015 1 Introduction This presentation
BAE Systems Platforms & Services Pointing Accuracy Analysis for a Commander s Independent Weapon Station Demonstrator April 22, 2015 Dirk Jungquist Dan Youtt 22 April 2015 1 Introduction This presentation
3. Preprocessing of ABAQUS/CAE
 3.1 Create new model database 3. Preprocessing of ABAQUS/CAE A finite element analysis in ABAQUS/CAE starts from create new model database in the toolbar. Then save it with a name user defined. To build
3.1 Create new model database 3. Preprocessing of ABAQUS/CAE A finite element analysis in ABAQUS/CAE starts from create new model database in the toolbar. Then save it with a name user defined. To build
NEW FINITE ELEMENT / MULTIBODY SYSTEM ALGORITHM FOR MODELING FLEXIBLE TRACKED VEHICLES
 NEW FINITE ELEMENT / MULTIBODY SYSTEM ALGORITHM FOR MODELING FLEXIBLE TRACKED VEHICLES Paramsothy Jayakumar, Mike Letherwood US Army RDECOM TARDEC Ulysses Contreras, Ashraf M. Hamed, Abdel-Nasser A. Mohamed,
NEW FINITE ELEMENT / MULTIBODY SYSTEM ALGORITHM FOR MODELING FLEXIBLE TRACKED VEHICLES Paramsothy Jayakumar, Mike Letherwood US Army RDECOM TARDEC Ulysses Contreras, Ashraf M. Hamed, Abdel-Nasser A. Mohamed,
Using MSC.Nastran for Explicit FEM Simulations
 3. LS-DYNA Anwenderforum, Bamberg 2004 CAE / IT III Using MSC.Nastran for Explicit FEM Simulations Patrick Doelfs, Dr. Ingo Neubauer MSC.Software GmbH, D-81829 München, Patrick.Doelfs@mscsoftware.com Abstract:
3. LS-DYNA Anwenderforum, Bamberg 2004 CAE / IT III Using MSC.Nastran for Explicit FEM Simulations Patrick Doelfs, Dr. Ingo Neubauer MSC.Software GmbH, D-81829 München, Patrick.Doelfs@mscsoftware.com Abstract:
Chapter 5 Modeling and Simulation of Mechanism
 Chapter 5 Modeling and Simulation of Mechanism In the present study, KED analysis of four bar planar mechanism using MATLAB program and ANSYS software has been carried out. The analysis has also been carried
Chapter 5 Modeling and Simulation of Mechanism In the present study, KED analysis of four bar planar mechanism using MATLAB program and ANSYS software has been carried out. The analysis has also been carried
Simulation of Overhead Crane Wire Ropes Utilizing LS-DYNA
 Simulation of Overhead Crane Wire Ropes Utilizing LS-DYNA Andrew Smyth, P.E. LPI, Inc., New York, NY, USA Abstract Overhead crane wire ropes utilized within manufacturing plants are subject to extensive
Simulation of Overhead Crane Wire Ropes Utilizing LS-DYNA Andrew Smyth, P.E. LPI, Inc., New York, NY, USA Abstract Overhead crane wire ropes utilized within manufacturing plants are subject to extensive
Model Library Mechanics
 Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
A MECHATRONIC APPROACH OF THE WINDSHIELD WIPER MECHANISMS
 A MECHATRONIC APPROACH OF THE WINDSHIELD WIPER MECHANISMS Alexandru Cătălin Transilvania University of Braşov calex@unitbv.ro Keywords: windshield wiper mechanism, dynamic simulation, control system, virtual
A MECHATRONIC APPROACH OF THE WINDSHIELD WIPER MECHANISMS Alexandru Cătălin Transilvania University of Braşov calex@unitbv.ro Keywords: windshield wiper mechanism, dynamic simulation, control system, virtual
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Tech Tip. The concise guide to Nastran Rigid Elements
 Tech Tip The concise guide to Nastran Rigid Elements The Nastran group of elements often described as the "Rigid Elements" are very useful engineering analysis tools. "Rigid Element" is a slight misnomer,
Tech Tip The concise guide to Nastran Rigid Elements The Nastran group of elements often described as the "Rigid Elements" are very useful engineering analysis tools. "Rigid Element" is a slight misnomer,
Virtual Testing Methodology for TPL Lifting Capacity of Agricultural Tractor TPL
 Virtual Testing Methodology for TPL Lifting Capacity of Agricultural Tractor TPL Dheeraj Pandey AM CAE International Tractors Limited Jalandhar Road, Hoshiarpur 146001 - India dheerajpandey@sonalika.com
Virtual Testing Methodology for TPL Lifting Capacity of Agricultural Tractor TPL Dheeraj Pandey AM CAE International Tractors Limited Jalandhar Road, Hoshiarpur 146001 - India dheerajpandey@sonalika.com
Module 1: Introduction to Finite Element Analysis. Lecture 4: Steps in Finite Element Analysis
 25 Module 1: Introduction to Finite Element Analysis Lecture 4: Steps in Finite Element Analysis 1.4.1 Loading Conditions There are multiple loading conditions which may be applied to a system. The load
25 Module 1: Introduction to Finite Element Analysis Lecture 4: Steps in Finite Element Analysis 1.4.1 Loading Conditions There are multiple loading conditions which may be applied to a system. The load
Introduction to Abaqus. About this Course
 Introduction to Abaqus R 6.12 About this Course Course objectives Upon completion of this course you will be able to: Use Abaqus/CAE to create complete finite element models. Use Abaqus/CAE to submit and
Introduction to Abaqus R 6.12 About this Course Course objectives Upon completion of this course you will be able to: Use Abaqus/CAE to create complete finite element models. Use Abaqus/CAE to submit and
Overcoming Data Translation Issues Using SimDesigner Enterprise Gateway
 Overcoming Data Translation Issues Using SimDesigner Enterprise Gateway Van N. Eidom Engineer Specialist Aircraft Braking Systems Corporation Introduction This presentation demonstrates how the SimDesigner
Overcoming Data Translation Issues Using SimDesigner Enterprise Gateway Van N. Eidom Engineer Specialist Aircraft Braking Systems Corporation Introduction This presentation demonstrates how the SimDesigner
Interface with FE programs
 Page 1 of 47 Interdisciplinary > RFlex > Flexible body Interface Interface with FE programs RecurDyn/RFlex can import FE model from ANSYS, NX/NASTRAN, MSC/NASTRAN and I-DEAS. Figure 1 RecurDyn/RFlex Interface
Page 1 of 47 Interdisciplinary > RFlex > Flexible body Interface Interface with FE programs RecurDyn/RFlex can import FE model from ANSYS, NX/NASTRAN, MSC/NASTRAN and I-DEAS. Figure 1 RecurDyn/RFlex Interface
Flexible multibody systems - Relative coordinates approach
 Computer-aided analysis of multibody dynamics (part 2) Flexible multibody systems - Relative coordinates approach Paul Fisette (paul.fisette@uclouvain.be) Introduction In terms of modeling, multibody scientists
Computer-aided analysis of multibody dynamics (part 2) Flexible multibody systems - Relative coordinates approach Paul Fisette (paul.fisette@uclouvain.be) Introduction In terms of modeling, multibody scientists
Q&A on EPILYSIS. EPILYSIS is an implicit Finite Element Analysis solver for Structural static and dynamics analyses.
 Questions & Answers physics on screen 1. What is EPILYSIS?... 1 2. What does the name EPILYSIS stands for?... 1 3. Who should use EPILYSIS?... 1 4. How does EPILYSIS work?... 1 5. Which are the minimum
Questions & Answers physics on screen 1. What is EPILYSIS?... 1 2. What does the name EPILYSIS stands for?... 1 3. Who should use EPILYSIS?... 1 4. How does EPILYSIS work?... 1 5. Which are the minimum
Chapter 1 Introduction
 Chapter 1 Introduction GTU Paper Analysis (New Syllabus) Sr. No. Questions 26/10/16 11/05/16 09/05/16 08/12/15 Theory 1. What is graphic standard? Explain different CAD standards. 2. Write Bresenham s
Chapter 1 Introduction GTU Paper Analysis (New Syllabus) Sr. No. Questions 26/10/16 11/05/16 09/05/16 08/12/15 Theory 1. What is graphic standard? Explain different CAD standards. 2. Write Bresenham s
Parametric Study of Engine Rigid Body Modes
 Parametric Study of Engine Rigid Body Modes Basem Alzahabi and Samir Nashef C. S. Mott Engineering and Science Center Dept. Mechanical Engineering Kettering University 17 West Third Avenue Flint, Michigan,
Parametric Study of Engine Rigid Body Modes Basem Alzahabi and Samir Nashef C. S. Mott Engineering and Science Center Dept. Mechanical Engineering Kettering University 17 West Third Avenue Flint, Michigan,
Deployment and Latching Simulation of Large Reflectors
 Deployment and Latching Simulation of Large Reflectors Sidharth Tiwary [1], B. Lakshmi Narayana [1], B.P. Nagaraj [1], G. Nagesh [2] and C.D. Sridhara [3] [1] Engineer, SMG [2] Project Director, Chandrayaan-2,
Deployment and Latching Simulation of Large Reflectors Sidharth Tiwary [1], B. Lakshmi Narayana [1], B.P. Nagaraj [1], G. Nagesh [2] and C.D. Sridhara [3] [1] Engineer, SMG [2] Project Director, Chandrayaan-2,
DYNAMIC MODELING OF WORKING SECTIONS OF GRASSLAND OVERSOWING MACHINE MSPD-2.5
 DYNAMIC MODELING OF WORKING SECTIONS OF GRASSLAND OVERSOWING MACHINE MSPD-2.5 Florin Loghin, Simion Popescu, Florean Rus Transilvania University of Brasov, Romania loghinflorin@unitbv.ro, simipop@unitbv.ro,
DYNAMIC MODELING OF WORKING SECTIONS OF GRASSLAND OVERSOWING MACHINE MSPD-2.5 Florin Loghin, Simion Popescu, Florean Rus Transilvania University of Brasov, Romania loghinflorin@unitbv.ro, simipop@unitbv.ro,
Cloth Simulation. COMP 768 Presentation Zhen Wei
 Cloth Simulation COMP 768 Presentation Zhen Wei Outline Motivation and Application Cloth Simulation Methods Physically-based Cloth Simulation Overview Development References 2 Motivation Movies Games VR
Cloth Simulation COMP 768 Presentation Zhen Wei Outline Motivation and Application Cloth Simulation Methods Physically-based Cloth Simulation Overview Development References 2 Motivation Movies Games VR
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Basic Concepts in Planar Kinematics 3.1, 3.2 September 18, 2013 Radu Serban University of Wisconsin-Madison 2 Before we get started Last time: Velocity
ME451 Kinematics and Dynamics of Machine Systems Basic Concepts in Planar Kinematics 3.1, 3.2 September 18, 2013 Radu Serban University of Wisconsin-Madison 2 Before we get started Last time: Velocity
Vehicle Dynamics & Safety: Multibody System. Simulation tools based on MultiBody approach are widespread in vehicle design and testing
 Vehicle Dynamics & Safety: Multibody System Simulation tools based on MultiBody approach are widespread in vehicle design and testing Vehicle Dynamics & Safety: Multibody System What is a Multibody System?
Vehicle Dynamics & Safety: Multibody System Simulation tools based on MultiBody approach are widespread in vehicle design and testing Vehicle Dynamics & Safety: Multibody System What is a Multibody System?
8 Tutorial: The Slider Crank Mechanism
 8 Tutorial: The Slider Crank Mechanism Multi-Body Simulation With MotionView / MotionSolve 12.0 written by Dipl.-Ing. (FH) Markus Kriesch and Dipl.-Ing. (FH) André Wehr, Germany Note: Some MBD fundamentals
8 Tutorial: The Slider Crank Mechanism Multi-Body Simulation With MotionView / MotionSolve 12.0 written by Dipl.-Ing. (FH) Markus Kriesch and Dipl.-Ing. (FH) André Wehr, Germany Note: Some MBD fundamentals
A simple example. Assume we want to find the change in the rotation angles to get the end effector to G. Effect of changing s
 CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
SIMPACK - A Tool for Off-Line and Real- Time Simulation
 SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
ECE421: Electronics for Instrumentation
 ECE421: Electronics for Instrumentation Lecture #8: Introduction to FEA & ANSYS Mostafa Soliman, Ph.D. March 23 rd 2015 Mostafa Soliman, Ph.D. 1 Outline Introduction to Finite Element Analysis Introduction
ECE421: Electronics for Instrumentation Lecture #8: Introduction to FEA & ANSYS Mostafa Soliman, Ph.D. March 23 rd 2015 Mostafa Soliman, Ph.D. 1 Outline Introduction to Finite Element Analysis Introduction
CO-SIMULATION OF MBD MODELS WITH DEM CODE TO PREDICT MOBILITY ON SOFT SOIL
 2018 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM MODELING & SIMULATION, TESTING AND VALIDATION (MSTV) TECHNICAL SESSION AUGUST 7-9, 2018 NOVI, MICHIGAN CO-SIMULATION OF MBD MODELS
2018 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM MODELING & SIMULATION, TESTING AND VALIDATION (MSTV) TECHNICAL SESSION AUGUST 7-9, 2018 NOVI, MICHIGAN CO-SIMULATION OF MBD MODELS
Reduction of Finite Element Models for Explicit Car Crash Simulations
 Reduction of Finite Element Models for Explicit Car Crash Simulations K. Flídrová a,b), D. Lenoir a), N. Vasseur b), L. Jézéquel a) a) Laboratory of Tribology and System Dynamics UMR-CNRS 5513, Centrale
Reduction of Finite Element Models for Explicit Car Crash Simulations K. Flídrová a,b), D. Lenoir a), N. Vasseur b), L. Jézéquel a) a) Laboratory of Tribology and System Dynamics UMR-CNRS 5513, Centrale
Lesson 1: Introduction to Pro/MECHANICA Motion
 Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Introduction to Physical Modelling Rory Adams Senior Application Engineer
 Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
MSC Software Aeroelastic Tools. Mike Coleman and Fausto Gill di Vincenzo
 MSC Software Aeroelastic Tools Mike Coleman and Fausto Gill di Vincenzo MSC Software Confidential 2 MSC Software Confidential 3 MSC Software Confidential 4 MSC Software Confidential 5 MSC Flightloads An
MSC Software Aeroelastic Tools Mike Coleman and Fausto Gill di Vincenzo MSC Software Confidential 2 MSC Software Confidential 3 MSC Software Confidential 4 MSC Software Confidential 5 MSC Flightloads An
GEOMETRY-BASED VIRTUAL MODEL VARIANTS FOR SHAPE OPTIMIZATION AND CAD REFEED
 GEOMETRY-BASED VIRTUAL MODEL VARIANTS FOR SHAPE OPTIMIZATION AND CAD REFEED *Dr. Werner Pohl, ** Prof. Dr. Klemens Rother *Fast Concept Modelling & Simulation (FCMS) GmbH, Munich, Germany, **University
GEOMETRY-BASED VIRTUAL MODEL VARIANTS FOR SHAPE OPTIMIZATION AND CAD REFEED *Dr. Werner Pohl, ** Prof. Dr. Klemens Rother *Fast Concept Modelling & Simulation (FCMS) GmbH, Munich, Germany, **University
Using Classical Mechanism Concepts to Motivate Modern Mechanism Analysis and Synthesis Methods
 Using Classical Mechanism Concepts to Motivate Modern Mechanism Analysis and Synthesis Methods Robert LeMaster, Ph.D. 1 Abstract This paper describes a methodology by which fundamental concepts in the
Using Classical Mechanism Concepts to Motivate Modern Mechanism Analysis and Synthesis Methods Robert LeMaster, Ph.D. 1 Abstract This paper describes a methodology by which fundamental concepts in the
Olivier Brüls. Department of Aerospace and Mechanical Engineering University of Liège
 Fully coupled simulation of mechatronic and flexible multibody systems: An extended finite element approach Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be
Fully coupled simulation of mechatronic and flexible multibody systems: An extended finite element approach Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be
MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR
 MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR N Narayan Rao 1, T Ashok 2, Anup Kumar Tammana 3 1 Assistant Professor, Department of Mechanical Engineering, VFSTRU, Guntur, India. nandurerao@gmail.com
MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR N Narayan Rao 1, T Ashok 2, Anup Kumar Tammana 3 1 Assistant Professor, Department of Mechanical Engineering, VFSTRU, Guntur, India. nandurerao@gmail.com
Modelling of a Lock System in a Door Subject to Break-in with Crowbar. Master s thesis in Applied Mechanics BRITTA KÄLLMAN
 Modelling of a Lock System in a Door Subject to Break-in with Crowbar Master s thesis in Applied Mechanics BRITTA KÄLLMAN Department of Applied Mechanics CHALMERS UNIVERSITY OF TECHNOLOGY Göteborg, Sweden
Modelling of a Lock System in a Door Subject to Break-in with Crowbar Master s thesis in Applied Mechanics BRITTA KÄLLMAN Department of Applied Mechanics CHALMERS UNIVERSITY OF TECHNOLOGY Göteborg, Sweden
John Hsu Nate Koenig ROSCon 2012
 John Hsu Nate Koenig ROSCon 2012 Outline What is Gazebo, and why should you use it Overview and architecture Environment modeling Robot modeling Interfaces Getting Help Simulation for Robots Towards accurate
John Hsu Nate Koenig ROSCon 2012 Outline What is Gazebo, and why should you use it Overview and architecture Environment modeling Robot modeling Interfaces Getting Help Simulation for Robots Towards accurate
ROBOTICS 01PEEQW Laboratory Project #1. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated 2 Lab Simulation Project #1: Pan-Tilt (PT) structure (2dof) This system is composed by two
ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated 2 Lab Simulation Project #1: Pan-Tilt (PT) structure (2dof) This system is composed by two
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
NX Nastran Basic. The core structural analysis FEA solver used by leading product development firms for over 40 years
 NX Nastran Basic The core structural analysis FEA solver used by leading product development firms for over 40 years Benefits Reduce risk by using simulation to save time and cost compared to physical
NX Nastran Basic The core structural analysis FEA solver used by leading product development firms for over 40 years Benefits Reduce risk by using simulation to save time and cost compared to physical
Chassis Design using Composite Materials MBS-Modeling and Experiences
 Chassis Design using Composite Materials MBS-Modeling and Experiences Udo Piram Bernd Austermann Uwe Heitz Calculations and Simulations System Functions ZF Friedrichshafen AG Chassis Design using Composite
Chassis Design using Composite Materials MBS-Modeling and Experiences Udo Piram Bernd Austermann Uwe Heitz Calculations and Simulations System Functions ZF Friedrichshafen AG Chassis Design using Composite
SolidWorks Motion Study Tutorial
 SolidWorks Motion Study Tutorial By: Mohamed Hakeem Mohamed Nizar Mechanical Engineering Student- May 2015 South Dakota School of Mines & Technology August 2013 Getting Started This tutorial is for you
SolidWorks Motion Study Tutorial By: Mohamed Hakeem Mohamed Nizar Mechanical Engineering Student- May 2015 South Dakota School of Mines & Technology August 2013 Getting Started This tutorial is for you
Chrono::Irrlicht demos
 Chrono Demos Chrono::Engine demos demo_ch_archive demo_ch_buildsystem demo_ch_coords demo_ch_functions demo_ch_math demo_ch_powertrain demo_ch_solver demo_ch_stream Demonstrate archives for serialization/de-serialization
Chrono Demos Chrono::Engine demos demo_ch_archive demo_ch_buildsystem demo_ch_coords demo_ch_functions demo_ch_math demo_ch_powertrain demo_ch_solver demo_ch_stream Demonstrate archives for serialization/de-serialization
ROBOTICS 01PEEQW Laboratory Project #1. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated This structure simulates a pan-tilt camera, pointing down to a plane. It is also possible to
ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated This structure simulates a pan-tilt camera, pointing down to a plane. It is also possible to
Using the NX Nastran Cbush Spring Element
 1/ 9 Springs versus CBUSH There is no versus, the only spring element that I use is the CBUSH. Why? Take a look at the note below written by a well respected Nastran architect (Ted Rose). For example,
1/ 9 Springs versus CBUSH There is no versus, the only spring element that I use is the CBUSH. Why? Take a look at the note below written by a well respected Nastran architect (Ted Rose). For example,
DARPA Investments in GEO Robotics
 DARPA Investments in GEO Robotics Carl Glen Henshaw, Ph.D. Signe Redfield, Ph.D. Naval Center for Space Technology U.S. Naval Research Laboratory Washington, DC 20375 May 22, 2015 Introduction Program
DARPA Investments in GEO Robotics Carl Glen Henshaw, Ph.D. Signe Redfield, Ph.D. Naval Center for Space Technology U.S. Naval Research Laboratory Washington, DC 20375 May 22, 2015 Introduction Program
Paul Goossens Product Director
 Paul Goossens Product Director June 2009 Maplesoft, a division of Waterloo Maple Inc., 2009 Maplesoft and Maple are trademarks of Waterloo Maple Inc. 2009 Maplesoft, a a division of of Waterloo Maple Inc.
Paul Goossens Product Director June 2009 Maplesoft, a division of Waterloo Maple Inc., 2009 Maplesoft and Maple are trademarks of Waterloo Maple Inc. 2009 Maplesoft, a a division of of Waterloo Maple Inc.
Femap and NX Nastran Best Practices
 Femap and NX Nastran Best Practices Technical Seminar for Femap and NX Nastran Users Hosted by: George Laird, Ph.D., P.E., Principal Mechanical Engineer Adrian Jensen, EIT, Senior Staff Engineer FEA, CFD
Femap and NX Nastran Best Practices Technical Seminar for Femap and NX Nastran Users Hosted by: George Laird, Ph.D., P.E., Principal Mechanical Engineer Adrian Jensen, EIT, Senior Staff Engineer FEA, CFD
COPYRIGHTED MATERIAL INTRODUCTION CHAPTER 1
 CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Leveraging Integrated Concurrent Engineering for vehicle dynamics simulation. Manuel CHENE MSC.Software France
 Leveraging Integrated Concurrent Engineering for vehicle dynamics simulation Manuel CHENE MSC.Software France Agenda Challenge of vehicle dynamic simulation: frequency domain coverage necessity for a multi
Leveraging Integrated Concurrent Engineering for vehicle dynamics simulation Manuel CHENE MSC.Software France Agenda Challenge of vehicle dynamic simulation: frequency domain coverage necessity for a multi
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Ansys Mechanical APDL
 Ansys Mechanical APDL Day 1: FEA and ANSYS 9.00 12.00 About ANSYS, What is FEA?, Instructor Example Getting Started 12.00 1.00 Interactive Vs. Batch Mode, Starting ANSYS, Product Launcher, ANSYS Workbench,
Ansys Mechanical APDL Day 1: FEA and ANSYS 9.00 12.00 About ANSYS, What is FEA?, Instructor Example Getting Started 12.00 1.00 Interactive Vs. Batch Mode, Starting ANSYS, Product Launcher, ANSYS Workbench,
Modal and Stress Analysis of X71A Sport Motorcycle Framebody Virtual Testing Model based on Finite Element Analysis
 Modal and Stress Analysis of X71A Sport Motorcycle Framebody Virtual Testing Model based on Finite Element Analysis Andi Wibowo 1, Djoko Setyanto 2 Departement of Mechanical Engineering, Atma Jaya Catholic
Modal and Stress Analysis of X71A Sport Motorcycle Framebody Virtual Testing Model based on Finite Element Analysis Andi Wibowo 1, Djoko Setyanto 2 Departement of Mechanical Engineering, Atma Jaya Catholic
Simplified FE Simulation of Frontal Occupant Restraint Systems
 7 th European LS-DYNA Conference Simplified FE Simulation of Frontal Occupant Restraint Systems Richard Brown, David Coleman, Ian Bruce Jaguar Land Rover, Coventry, UK. Arup, Solihull, UK. Summary: The
7 th European LS-DYNA Conference Simplified FE Simulation of Frontal Occupant Restraint Systems Richard Brown, David Coleman, Ian Bruce Jaguar Land Rover, Coventry, UK. Arup, Solihull, UK. Summary: The
ME 345: Modeling & Simulation. Introduction to Finite Element Method
 ME 345: Modeling & Simulation Introduction to Finite Element Method Examples Aircraft 2D plate Crashworthiness 2 Human Heart Gears Structure Human Spine 3 F.T. Fisher, PhD Dissertation, 2002 Fluid Flow
ME 345: Modeling & Simulation Introduction to Finite Element Method Examples Aircraft 2D plate Crashworthiness 2 Human Heart Gears Structure Human Spine 3 F.T. Fisher, PhD Dissertation, 2002 Fluid Flow
Role of Kinematic Analysis in tuning the Dynamic Behavior of a Formula Car
 gopalax -International Journal of Technology And Engineering System(IJTES): Jan March 2011- Vol.2.No.3. Role of Kinematic Analysis in tuning the Dynamic Behavior of a Formula Car K. J. Prashanth 1, Ashish
gopalax -International Journal of Technology And Engineering System(IJTES): Jan March 2011- Vol.2.No.3. Role of Kinematic Analysis in tuning the Dynamic Behavior of a Formula Car K. J. Prashanth 1, Ashish
Using Adams/View to Develop a Real-Time ROV Simulator
 Using Adams/View to Develop a Real-Time ROV Simulator Marcelo Prado Gerson Brand Álvaro Costa Neto Multicorpos Engenharia John Hough MSC.Software Brazil Ricardo Capplonch Petrobrás Summary Introduction
Using Adams/View to Develop a Real-Time ROV Simulator Marcelo Prado Gerson Brand Álvaro Costa Neto Multicorpos Engenharia John Hough MSC.Software Brazil Ricardo Capplonch Petrobrás Summary Introduction
Efficient Topology, Topometry and Sizing Optimisation for LS-DYNA Analysis Problems. Coupling LS-DYNA to VR&D GENESIS
 Efficient Topology, Topometry and Sizing Optimisation for LS-DYNA Analysis Problems Coupling LS-DYNA to VR&D GENESIS Martin Gambling Managing Director GRM Consulting Ltd, Leamington Spa, UK Summary: For
Efficient Topology, Topometry and Sizing Optimisation for LS-DYNA Analysis Problems Coupling LS-DYNA to VR&D GENESIS Martin Gambling Managing Director GRM Consulting Ltd, Leamington Spa, UK Summary: For
EDEM Release Notes
 Revision 0 Copyrights and Trademarks Copyright 2015 DEM Solutions. All rights reserved. Information in this document is subject to change without notice. The software described in this document is furnished
Revision 0 Copyrights and Trademarks Copyright 2015 DEM Solutions. All rights reserved. Information in this document is subject to change without notice. The software described in this document is furnished
From direct to inverse analysis in flexible multibody dynamics
 From direct to inverse analysis in flexible multibody dynamics Olivier Brüls Department of Aerospace and Mechanical Engineering (LTAS) University of Liège, Belgium Annual GAMM Conference Darmstadt, March
From direct to inverse analysis in flexible multibody dynamics Olivier Brüls Department of Aerospace and Mechanical Engineering (LTAS) University of Liège, Belgium Annual GAMM Conference Darmstadt, March
Sensor Accuracy in Vehicle Safety
 Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
FEA Model Updating Using SDM
 FEA l Updating Using SDM Brian Schwarz & Mark Richardson Vibrant Technology, Inc. Scotts Valley, California David L. Formenti Sage Technologies Santa Cruz, California ABSTRACT In recent years, a variety
FEA l Updating Using SDM Brian Schwarz & Mark Richardson Vibrant Technology, Inc. Scotts Valley, California David L. Formenti Sage Technologies Santa Cruz, California ABSTRACT In recent years, a variety
NX Advanced FEM. Benefits
 Advanced FEM fact sheet Siemens PLM Software www.siemens.com/plm Summary Advanced FEM software is a comprehensive multi-cad finite element modeling and results visualization product that is designed to
Advanced FEM fact sheet Siemens PLM Software www.siemens.com/plm Summary Advanced FEM software is a comprehensive multi-cad finite element modeling and results visualization product that is designed to
Normal Modes Analysis of a Simply-Supported Stiffened Plate
 APPENDIX C Normal Modes Analysis of a Simply-Supported Stiffened Plate Objectives: Manually convert a Linear Static analysis (Sol 101) input file to a Normal Modes analysis (Sol 103) input file. Learn
APPENDIX C Normal Modes Analysis of a Simply-Supported Stiffened Plate Objectives: Manually convert a Linear Static analysis (Sol 101) input file to a Normal Modes analysis (Sol 103) input file. Learn
MSC Software: Release Overview - MSC Nastran MSC Nastran 2014 RELEASE OVERVIEW
 MSC Nastran 2014 Welcome to MSC Nastran 2014! Welcome to MSC Nastran 2014! The MSC Nastran 2014 release is focused on delivering new capabilities and performance required to solve multidisciplinary problems.
MSC Nastran 2014 Welcome to MSC Nastran 2014! Welcome to MSC Nastran 2014! The MSC Nastran 2014 release is focused on delivering new capabilities and performance required to solve multidisciplinary problems.
DYNAMICS MODELING OF A POWER TRANSMISSION MECHANISM WITH LINKAGE AND INERTIAL MASS
 FACULTY OF MCHANICS AND TCHNOLOGY SCINTIFIC BULLTIN AUTOMOTIV series, ear XIX, no. B DYNAMICS MODLING OF A POWR TRANSMISSION MCHANISM WITH LINKAG AND INRTIAL MASS Ion ION-GUTA Universit of Pitesti, Romania,
FACULTY OF MCHANICS AND TCHNOLOGY SCINTIFIC BULLTIN AUTOMOTIV series, ear XIX, no. B DYNAMICS MODLING OF A POWR TRANSMISSION MCHANISM WITH LINKAG AND INRTIAL MASS Ion ION-GUTA Universit of Pitesti, Romania,
KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT
 Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT Nadia Ramona CREŢESCU 1 Abstract: This
Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT Nadia Ramona CREŢESCU 1 Abstract: This
Structural Nonlinear Analysis of a Disconnector Pelikelo (a kind of hook) using ANSYS/Workbench
 using ANSYS/Workbench") Structural Nonlinear Analysis of a Disconnector Pelikelo (a kind of hook) using ANSYS/Workbench Mário Coutinho MCS Engineering LTDA. Fátima Souza, M.Sc., Gabriel Silva e Decio Paiva SOFTEC Software Technology
Structural Nonlinear Analysis of a Disconnector Pelikelo (a kind of hook) using ANSYS/Workbench Mário Coutinho MCS Engineering LTDA. Fátima Souza, M.Sc., Gabriel Silva e Decio Paiva SOFTEC Software Technology
FORMING SIMULATION USING RIGID-PLASTIC MATERIAL MODEL IN MARC
 SESSION TITLE WILL BE COMPLETED BY MSC SOFTWARE FORMING SIMULATION USING RIGID-PLASTIC MATERIAL MODEL IN MARC Gary Huang, Simufact-Americas LLC April 8, 2013 SUMMARY When simulating large deformation in
SESSION TITLE WILL BE COMPLETED BY MSC SOFTWARE FORMING SIMULATION USING RIGID-PLASTIC MATERIAL MODEL IN MARC Gary Huang, Simufact-Americas LLC April 8, 2013 SUMMARY When simulating large deformation in
Multidisciplinary System Design Optimization (MSDO)
") Multidisciplinary System Design Optimization (MSDO) Structural Optimization & Design Space Optimization Lecture 18 April 7, 2004 Il Yong Kim 1 I. Structural Optimization II. Integrated Structural Optimization
Multidisciplinary System Design Optimization (MSDO) Structural Optimization & Design Space Optimization Lecture 18 April 7, 2004 Il Yong Kim 1 I. Structural Optimization II. Integrated Structural Optimization
Efficient Shape Optimisation of an Aircraft Landing Gear Door Locking Mechanism by Coupling Abaqus to GENESIS
 Efficient Shape Optimisation of an Aircraft Landing Gear Door Locking Mechanism by Coupling Abaqus to GENESIS Mark Arnold and Martin Gambling Penso Consulting Ltd GRM Consulting Ltd Abstract: The objective
Efficient Shape Optimisation of an Aircraft Landing Gear Door Locking Mechanism by Coupling Abaqus to GENESIS Mark Arnold and Martin Gambling Penso Consulting Ltd GRM Consulting Ltd Abstract: The objective
Lesson 6: Assembly Structural Analysis
 Lesson 6: Assembly Structural Analysis In this lesson you will learn different approaches to analyze the assembly using assembly analysis connection properties between assembly components. In addition
Lesson 6: Assembly Structural Analysis In this lesson you will learn different approaches to analyze the assembly using assembly analysis connection properties between assembly components. In addition
ME Week 12 Piston Mechanical Event Simulation
 Introduction to Mechanical Event Simulation The purpose of this introduction to Mechanical Event Simulation (MES) project is to explorer the dynamic simulation environment of Autodesk Simulation. This
Introduction to Mechanical Event Simulation The purpose of this introduction to Mechanical Event Simulation (MES) project is to explorer the dynamic simulation environment of Autodesk Simulation. This
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 1: Introduction
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
Modelling of Torsion Beam Rear Suspension by Using Multibody Method
 Multibody System Dynamics 12: 303 316, 2004. C 2004 Kluwer Academic Publishers. Printed in the Netherlands. 303 Modelling of Torsion Beam Rear Suspension by Using Multibody Method G. FICHERA, M. LACAGNINA
Multibody System Dynamics 12: 303 316, 2004. C 2004 Kluwer Academic Publishers. Printed in the Netherlands. 303 Modelling of Torsion Beam Rear Suspension by Using Multibody Method G. FICHERA, M. LACAGNINA
To Do. History of Computer Animation. These Lectures. 2D and 3D Animation. Computer Animation. Foundations of Computer Graphics (Spring 2010)
") Foundations of Computer Graphics (Spring 2010) CS 184, Lecture 24: Animation http://inst.eecs.berkeley.edu/~cs184 To Do Submit HW 4 (today) Start working on HW 5 (can be simple add-on) Many slides courtesy
Foundations of Computer Graphics (Spring 2010) CS 184, Lecture 24: Animation http://inst.eecs.berkeley.edu/~cs184 To Do Submit HW 4 (today) Start working on HW 5 (can be simple add-on) Many slides courtesy