Chapter 2 - Fundamentals. Comunicação Visual Interactiva
|
|
|
- Melina Ward
- 6 years ago
- Views:
Transcription
1 Chapter - Fundamentals Comunicação Visual Interactiva
")
2 Structure of the human eye (1) CVI

3 Structure of the human eye () Celular structure of the retina. On the right we can see one cone between two groups of rods. CVI 3

 CVI 4")
4 Structure of the human eye (3) CVI 4
 CVI")
5 Structure of the human eye (4) CVI 5
6 Photometric model source of light object on the surface sensor (camera) x, y ix, yrx y f, x y x, y 1 f x 0, y i, Amount of illumination that strikes the object 0 r l MIN L MAX Amount of illumination reflected by the object L MIN l L MAX L, Interval variation of the light intensity 0, L where Normalization, where 0 corresponds to black and L-1 to white CVI 6

7 Artificial Systems for Image acquisition (1) Three main configurations of the sensors to transform illumination energy into digital images Cameras CCD (Charge-coupled devices) Typical dimensions: 6.4mm x 4.8mm ½ (640x480 ou 51x51 pixels) For each new image, the electric charges are cleaned and then the received light is integrated in a given time interval (controlled by the shutter) CVI In the final stage, the image plane (array D) is scaned. This process is accomplished line by 7 line.

8 Artificial systems for image acquisition () CCD vs CMOS Established technology; Specific technology; High production costs; High consumption; Higher sensibility; Sequential read; Recent technology; Standard IC technology; Cheaper; Less consumption; Lower sensibility; Pixel amplification; Random acess to pixels; Integration of other components in the same chip; CVI 8


9 Artificial systems for image acquisition (3) CVI 9


10 Bayer Filter (i) An example: CVI 10

11 RGB Filter at different time instants (ii) Original image Imagem chromatic distortion CVI 11

12 Artificial systems for image acquisition (4) CVI 1
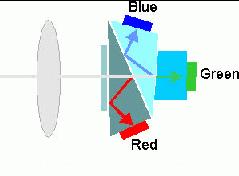
13 Artificial systems for image acquisition (5) CVI 13
 ) Translucent material")
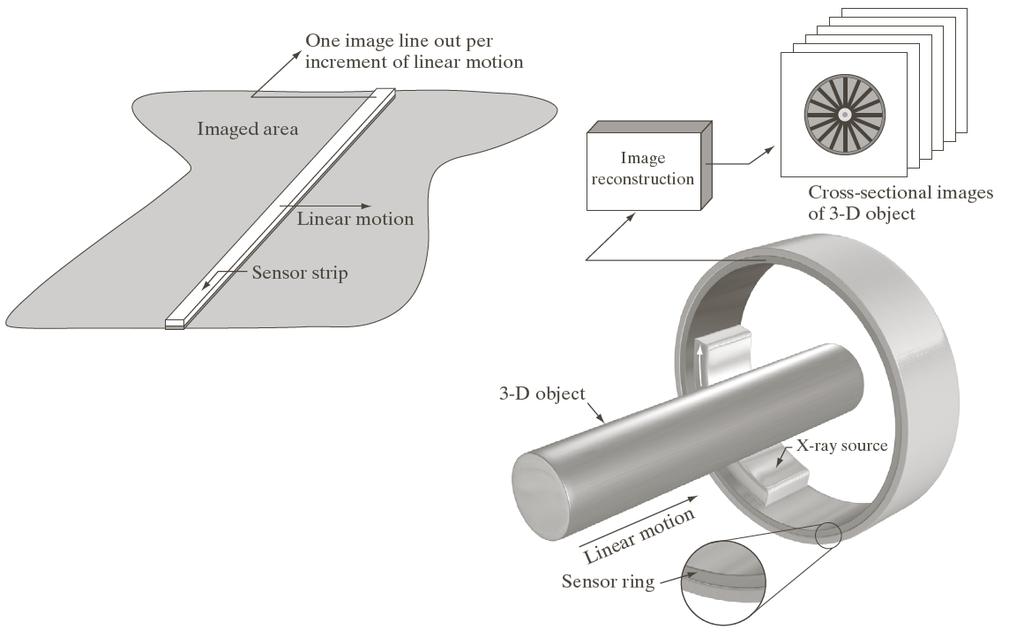
14 Image formation pin-hole Model perspective projection Dark camera ( câmara escura (século XVI) ) Translucent material CVI 14
 CVI")
15 Perspective effects The apparent size of the object depends on its distance Retina plan (inverted image) The projection of two parallel straight lines seems to converge to a point Virtual plan (non-inverted image) CVI 15
16 Perspective projection Mathematical model x y f f x z y z How to correlate the coordinates of a point in the real world, P, with the corresponding coordinates in the retina, P? ( x, y, z Confirmations: The points P, P and O (optical center) are collinear P ) P ( x, y, z) OP The point is projected on the sensor plan that is located at a distance f (focal distance) of the optical center z OP f CVI 16
17 Perspective Projection (II) When the pin-hole model is used, the relation between the Cartezian coordinates ( x, y, z) of a point in the reference of the camera C and the coordinates of the corresponding projection ( x', y') to the plan of the image is given by x f x z y' f With the assumption that the origin of the reference camera is coincident with the optical center of the camera, and the image origin is the main point From the expressions of x and y', it can be shown that the distance R between two points located in the plane at the distance z to the camera and the distance r, between the projection of these points in the image plan is given as r f R z y z CVI 17

18 Perspective Projection (III) From the expressions of x and y', it can be shown that the distance R between two located points in the plane at the distance z to the camera and the distance r, between the projection of these points in the image plan is given as R r f z CVI 18
 Diffraction phenomena optical axis CVI f f z")
19 Image plane Cameras with lenses (1) In practice we need to use lenses It acts as light collector Allows to adjust the focus of objects (changing f) Diffraction phenomena optical axis CVI f f z 19

20 Difraction Example CVI 0


21 Cameras with lenses () Deviations from the model Imperfections in the lens lead to a circle of confusion Sensor with discrete units; spatial integration leads to a blurring effect; limitation of the observed detail. Other problems Chromatic distortion wrap-around blooming Geometric distortion blooming CVI 1
22 Focal distance of the lens (1) Magnification factor m f z ' x x y y m Field of view space of the scene projected by the sensor It depends not only the focal distânce, f, but also of the sensor dimensions (usually 1/4, 1/3 ou 1/ ) When is large, the lens is said a wide angle lens When small the lens is telescopic H Sensor area L H H L 1 tan 1 tan H f L f CVI
23 Image plane Focal distance of the lens () Depth-of-field (profundidade de campo) P P optical axis p p' f f z CVI 3
24 CVI 4

25 Image plane Focal distance of the lens (3) Change of the depth-of-field Distance change between the lens and the image plan Deformation of the lens P P optical axis p p' f f z CVI 5
")
26 Sampling and quantization (1) CVI 6
")
27 Sampling and quantization () CVI 7

28 Representation of the digital images (1) f x, y f f f 0,0 f 0,1 f 0, N 1 1,0 f 1,1 f 1, N 1 M 1,0 f M 1,1 f M 1, N 1 CVI 8

29 Representation of the digital images () Gray level or number of colors k L Number of bits b M N k CVI 9

30 Spatial and gray level resolution CVI 30
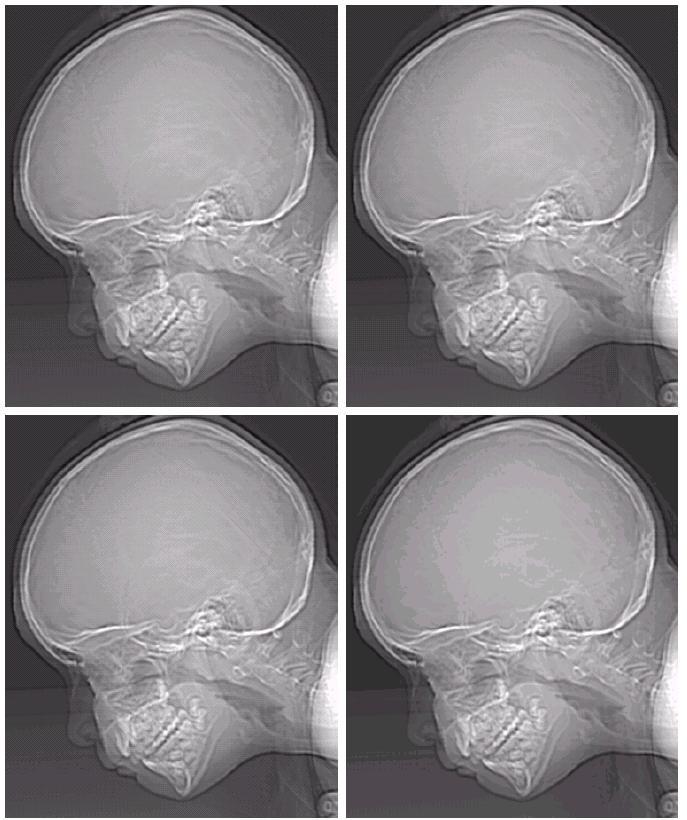
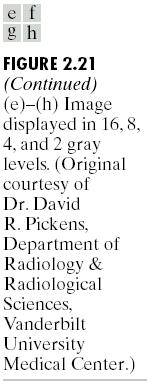
31 Number of quantification levels CVI 31



32 Image interpolation (1)? Nearest neighbor Bilinear interpolation???? Bicubic interpolation v x y ax by cxy d, vx, y CVI 3 3 i0 3 j0 a ij x i y j

33 Image interpolation () CVI 33
34 Relationships between pixels (1) Neighborhood of a pixel Neighborhood 4 x y X X? X X N 4 x 1, y, x 1, y, x, y 1, x, y 1 Neighborhood 8 X X X X? X X X X N 8 x 1, y 1, x 1, y 1, x 1, y 1, x 1, y 1 CVI 34

35 Relationships between pixels () Path between x y e q s, t p, x 0, y0, x1, y1,, x n, y n where x 0, y0 x, y, xn, yn s, t x y, x y i 1,,, and i, i i1, i1 are neighbors, for n Connectivity Two pixels are connected if there exists a path that links them Region Set of connected pixels. CVI 35
36 Relationships between pixels(3) Euclidian distance City-block or D4 distance Chessboard or D8 distance y x p, t s q, w v z, 0, q p D p D q q p D,, z D q q p D z p D,,, Distance metrics for pixels, t y s x q p D e t y s x q p D, 4 t y s x q p D, max, CVI
37 Arithmetic operations (1) Operations that are performed between corresponding pixels pairs (point-by-point operations) x, y f x, y gx y s, x, y f x, y gx y d, x, y f x, y gx y p, x, y f x, y gx y v, CVI 37
")
38 Arithmetic operations () CVI 38
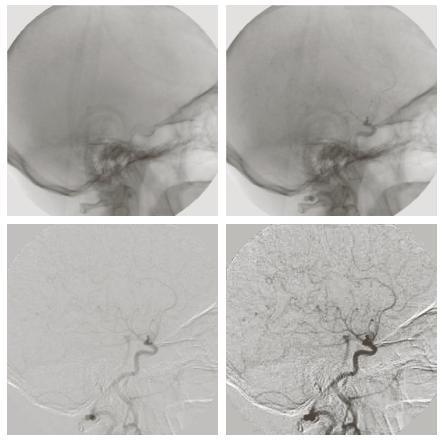
39 Arithmetic operations (3) CVI 39
")
40 Arithmetic operations (4) CVI 40
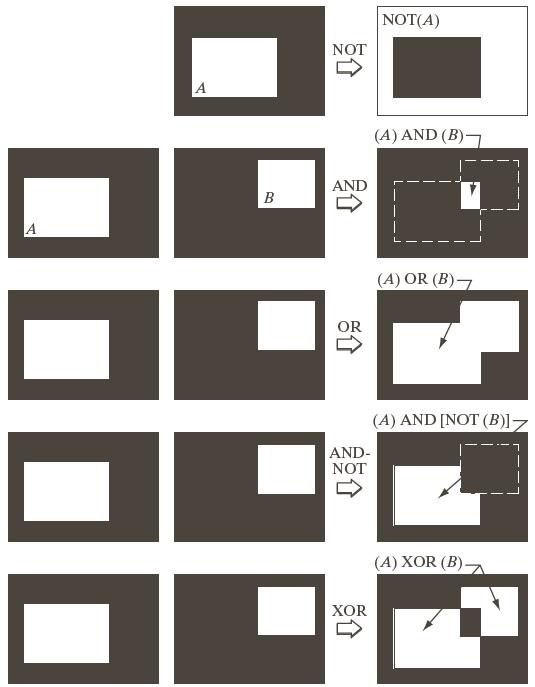
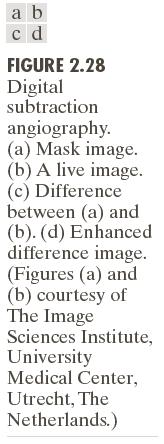
41 Logical operations and sets (1) CVI 41
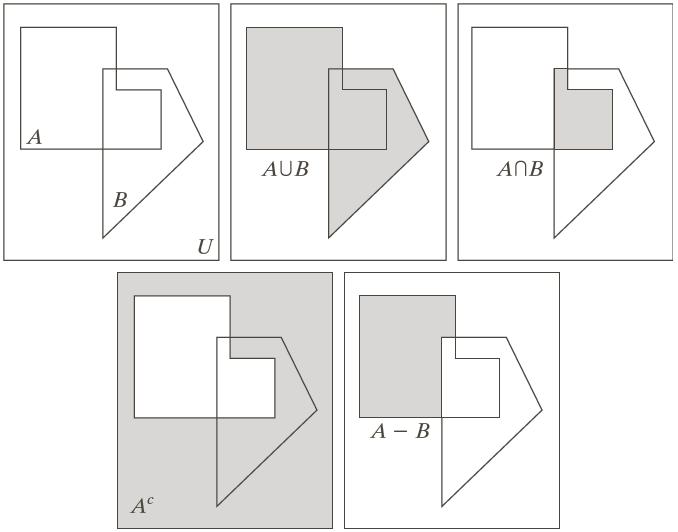

42 Logical operations and sets () CVI 4
43 Spatial operations (1) 1. Operation based on one pxel s T z. Operation based on neighbors S Neighbors of the pixel p x, y xy 3. Geometric transformations x, y T v, w CVI 43
 Negative")
44 Spatial operations Examples (1) Negative image CVI 44

 Mean")
45 Spatial operations Examples () Mean CVI 45
46 Spatial operations Examples (3) Afine transform x y 1 v w1t v w1 t t t t t t CVI 46
47 Types of Images Definition: a monochromatic image (gray level), I[r,c], assigns for each pixel one scalar value (intensity) Definition: a multiespectral imagem, M[r,c], assigns for each pixel one N-dimensional vector. In the case of color images, we have N=3 (RGB) Definition: a binary image, B[r,c], assigns each pixel the values of 0 or 1 Definition a label image (classes), L[r,c], assigns each pixel to a given label, that is chosen from a pre-defined alphabet of labels CVI 47

 Example of a")
48 Image formats Header Data Use (or not) data compression algorithms. Compression without losses (lossless) or with losses (lossy) Example of a format CVI 48
49 Readings Chapter 1 e de R. Gonzalez, R. Woods, Digital Image Processing, 3ª edição, 008. Chapter de L. Shapiro, G. Stockman, Computer Vision, 001. CVI 49
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
Laser sensors. Transmitter. Receiver. Basilio Bona ROBOTICA 03CFIOR
 Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Introduction to Computer Vision. Introduction CMPSCI 591A/691A CMPSCI 570/670. Image Formation
 Introduction CMPSCI 591A/691A CMPSCI 570/670 Image Formation Lecture Outline Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic
Introduction CMPSCI 591A/691A CMPSCI 570/670 Image Formation Lecture Outline Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic
IMAGING. Images are stored by capturing the binary data using some electronic devices (SENSORS)
") IMAGING Film photography Digital photography Images are stored by capturing the binary data using some electronic devices (SENSORS) Sensors: Charge Coupled Device (CCD) Photo multiplier tube (PMT) The
IMAGING Film photography Digital photography Images are stored by capturing the binary data using some electronic devices (SENSORS) Sensors: Charge Coupled Device (CCD) Photo multiplier tube (PMT) The
Lecture 2 Image Processing and Filtering
 Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Computer Vision. The image formation process
 Computer Vision The image formation process Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 The image
Computer Vision The image formation process Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 The image
Basilio Bona DAUIN Politecnico di Torino
 ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The
ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The
Digital Image Processing. Introduction
 Digital Image Processing Introduction Digital Image Definition An image can be defined as a twodimensional function f(x,y) x,y: Spatial coordinate F: the amplitude of any pair of coordinate x,y, which
Digital Image Processing Introduction Digital Image Definition An image can be defined as a twodimensional function f(x,y) x,y: Spatial coordinate F: the amplitude of any pair of coordinate x,y, which
Digital Image Processing
 Digital Image Processing Lecture # 4 Digital Image Fundamentals - II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Presentation Outline
Digital Image Processing Lecture # 4 Digital Image Fundamentals - II ALI JAVED Lecturer SOFTWARE ENGINEERING DEPARTMENT U.E.T TAXILA Email:: ali.javed@uettaxila.edu.pk Office Room #:: 7 Presentation Outline
Image Formation. Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico
 Image Formation Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico 1 Objectives Fundamental imaging notions Physical basis for image formation
Image Formation Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico 1 Objectives Fundamental imaging notions Physical basis for image formation
Understanding Variability
 Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
Introduction to Computer Vision. Human Eye Sampling
 Human Eye Sampling Sampling Rough Idea: Ideal Case 23 "Digitized Image" "Continuous Image" Dirac Delta Function 2D "Comb" δ(x,y) = 0 for x = 0, y= 0 s δ(x,y) dx dy = 1 f(x,y)δ(x-a,y-b) dx dy = f(a,b) δ(x-ns,y-ns)
Human Eye Sampling Sampling Rough Idea: Ideal Case 23 "Digitized Image" "Continuous Image" Dirac Delta Function 2D "Comb" δ(x,y) = 0 for x = 0, y= 0 s δ(x,y) dx dy = 1 f(x,y)δ(x-a,y-b) dx dy = f(a,b) δ(x-ns,y-ns)
Introduction to Computer Graphics with WebGL
 Introduction to Computer Graphics with WebGL Ed Angel Professor Emeritus of Computer Science Founding Director, Arts, Research, Technology and Science Laboratory University of New Mexico Image Formation
Introduction to Computer Graphics with WebGL Ed Angel Professor Emeritus of Computer Science Founding Director, Arts, Research, Technology and Science Laboratory University of New Mexico Image Formation
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Representing the World
 Table of Contents Representing the World...1 Sensory Transducers...1 The Lateral Geniculate Nucleus (LGN)... 2 Areas V1 to V5 the Visual Cortex... 2 Computer Vision... 3 Intensity Images... 3 Image Focusing...
Table of Contents Representing the World...1 Sensory Transducers...1 The Lateral Geniculate Nucleus (LGN)... 2 Areas V1 to V5 the Visual Cortex... 2 Computer Vision... 3 Intensity Images... 3 Image Focusing...
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
CS 548: Computer Vision and Image Processing Digital Image Basics. Spring 2016 Dr. Michael J. Reale
 CS 548: Computer Vision and Image Processing Digital Image Basics Spring 2016 Dr. Michael J. Reale HUMAN VISION Introduction In Computer Vision, we are ultimately trying to equal (or surpass) the human
CS 548: Computer Vision and Image Processing Digital Image Basics Spring 2016 Dr. Michael J. Reale HUMAN VISION Introduction In Computer Vision, we are ultimately trying to equal (or surpass) the human
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Minimizing Noise and Bias in 3D DIC. Correlated Solutions, Inc.
 Minimizing Noise and Bias in 3D DIC Correlated Solutions, Inc. Overview Overview of Noise and Bias Digital Image Correlation Background/Tracking Function Minimizing Noise Focus Contrast/Lighting Glare
Minimizing Noise and Bias in 3D DIC Correlated Solutions, Inc. Overview Overview of Noise and Bias Digital Image Correlation Background/Tracking Function Minimizing Noise Focus Contrast/Lighting Glare
3D graphics, raster and colors CS312 Fall 2010
 Computer Graphics 3D graphics, raster and colors CS312 Fall 2010 Shift in CG Application Markets 1989-2000 2000 1989 3D Graphics Object description 3D graphics model Visualization 2D projection that simulates
Computer Graphics 3D graphics, raster and colors CS312 Fall 2010 Shift in CG Application Markets 1989-2000 2000 1989 3D Graphics Object description 3D graphics model Visualization 2D projection that simulates
Miniaturized Camera Systems for Microfactories
 Miniaturized Camera Systems for Microfactories Timo Prusi, Petri Rokka, and Reijo Tuokko Tampere University of Technology, Department of Production Engineering, Korkeakoulunkatu 6, 33720 Tampere, Finland
Miniaturized Camera Systems for Microfactories Timo Prusi, Petri Rokka, and Reijo Tuokko Tampere University of Technology, Department of Production Engineering, Korkeakoulunkatu 6, 33720 Tampere, Finland
ECE-161C Cameras. Nuno Vasconcelos ECE Department, UCSD
 ECE-161C Cameras Nuno Vasconcelos ECE Department, UCSD Image formation all image understanding starts with understanding of image formation: projection of a scene from 3D world into image on 2D plane 2
ECE-161C Cameras Nuno Vasconcelos ECE Department, UCSD Image formation all image understanding starts with understanding of image formation: projection of a scene from 3D world into image on 2D plane 2
CS201 Computer Vision Lect 4 - Image Formation
 CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
Computer Graphics. Bing-Yu Chen National Taiwan University The University of Tokyo
 Computer Graphics Bing-Yu Chen National Taiwan University The University of Tokyo Introduction The Graphics Process Color Models Triangle Meshes The Rendering Pipeline 1 What is Computer Graphics? modeling
Computer Graphics Bing-Yu Chen National Taiwan University The University of Tokyo Introduction The Graphics Process Color Models Triangle Meshes The Rendering Pipeline 1 What is Computer Graphics? modeling
What is an Image? Image Acquisition. Image Processing - Lesson 2. An image is a projection of a 3D scene into a 2D projection plane.
 mage Processing - Lesson 2 mage Acquisition mage Characteristics mage Acquisition mage Digitization Sampling Quantization mage Histogram What is an mage? An image is a projection of a 3D scene into a 2D
mage Processing - Lesson 2 mage Acquisition mage Characteristics mage Acquisition mage Digitization Sampling Quantization mage Histogram What is an mage? An image is a projection of a 3D scene into a 2D
CS 563 Advanced Topics in Computer Graphics Camera Models. by Kevin Kardian
 CS 563 Advanced Topics in Computer Graphics Camera Models by Kevin Kardian Introduction Pinhole camera is insufficient Everything in perfect focus Less realistic Different camera models are possible Create
CS 563 Advanced Topics in Computer Graphics Camera Models by Kevin Kardian Introduction Pinhole camera is insufficient Everything in perfect focus Less realistic Different camera models are possible Create
VC 16/17 TP5 Single Pixel Manipulation
 VC 16/17 TP5 Single Pixel Manipulation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Dynamic Range Manipulation
VC 16/17 TP5 Single Pixel Manipulation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Dynamic Range Manipulation
Robotics - Projective Geometry and Camera model. Marcello Restelli
 Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
NAME :... Signature :... Desk no. :... Question Answer
 Written test Tuesday 19th of December 2000. Aids allowed : All usual aids Weighting : All questions are equally weighted. NAME :................................................... Signature :...................................................
Written test Tuesday 19th of December 2000. Aids allowed : All usual aids Weighting : All questions are equally weighted. NAME :................................................... Signature :...................................................
Robot Vision: Camera calibration
 Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
EC-433 Digital Image Processing
 EC-433 Digital Image Processing Lecture 4 Digital Image Fundamentals Dr. Arslan Shaukat Acknowledgement: Lecture slides material from Dr. Rehan Hafiz, Gonzalez and Woods Interpolation Required in image
EC-433 Digital Image Processing Lecture 4 Digital Image Fundamentals Dr. Arslan Shaukat Acknowledgement: Lecture slides material from Dr. Rehan Hafiz, Gonzalez and Woods Interpolation Required in image
UNIT-2 IMAGE REPRESENTATION IMAGE REPRESENTATION IMAGE SENSORS IMAGE SENSORS- FLEX CIRCUIT ASSEMBLY
 18-08-2016 UNIT-2 In the following slides we will consider what is involved in capturing a digital image of a real-world scene Image sensing and representation Image Acquisition Sampling and quantisation
18-08-2016 UNIT-2 In the following slides we will consider what is involved in capturing a digital image of a real-world scene Image sensing and representation Image Acquisition Sampling and quantisation
Motivation. Gray Levels
 Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Computer Vision Project-1
 University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
Computer Vision Course Lecture 02. Image Formation Light and Color. Ceyhun Burak Akgül, PhD cba-research.com. Spring 2015 Last updated 04/03/2015
 Computer Vision Course Lecture 02 Image Formation Light and Color Ceyhun Burak Akgül, PhD cba-research.com Spring 2015 Last updated 04/03/2015 Photo credit: Olivier Teboul vision.mas.ecp.fr/personnel/teboul
Computer Vision Course Lecture 02 Image Formation Light and Color Ceyhun Burak Akgül, PhD cba-research.com Spring 2015 Last updated 04/03/2015 Photo credit: Olivier Teboul vision.mas.ecp.fr/personnel/teboul
Reflectance & Lighting
 Reflectance & Lighting Computer Vision I CSE5A Lecture 6 Last lecture in a nutshell Need for lenses (blur from pinhole) Thin lens equation Distortion and aberrations Vignetting CS5A, Winter 007 Computer
Reflectance & Lighting Computer Vision I CSE5A Lecture 6 Last lecture in a nutshell Need for lenses (blur from pinhole) Thin lens equation Distortion and aberrations Vignetting CS5A, Winter 007 Computer
General Physics II. Mirrors & Lenses
 General Physics II Mirrors & Lenses Nothing New! For the next several lectures we will be studying geometrical optics. You already know the fundamentals of what is going on!!! Reflection: θ 1 = θ r incident
General Physics II Mirrors & Lenses Nothing New! For the next several lectures we will be studying geometrical optics. You already know the fundamentals of what is going on!!! Reflection: θ 1 = θ r incident
Lecture 1 Image Formation.
 Lecture 1 Image Formation peimt@bit.edu.cn 1 Part 3 Color 2 Color v The light coming out of sources or reflected from surfaces has more or less energy at different wavelengths v The visual system responds
Lecture 1 Image Formation peimt@bit.edu.cn 1 Part 3 Color 2 Color v The light coming out of sources or reflected from surfaces has more or less energy at different wavelengths v The visual system responds
Chapter 36. Image Formation
 Chapter 36 Image Formation Apr 22, 2012 Light from distant things We learn about a distant thing from the light it generates or redirects. The lenses in our eyes create images of objects our brains can
Chapter 36 Image Formation Apr 22, 2012 Light from distant things We learn about a distant thing from the light it generates or redirects. The lenses in our eyes create images of objects our brains can
Computational Photography
 Computational Photography Photography and Imaging Michael S. Brown Brown - 1 Part 1 Overview Photography Preliminaries Traditional Film Imaging (Camera) Part 2 General Imaging 5D Plenoptic Function (McMillan)
Computational Photography Photography and Imaging Michael S. Brown Brown - 1 Part 1 Overview Photography Preliminaries Traditional Film Imaging (Camera) Part 2 General Imaging 5D Plenoptic Function (McMillan)
Lecture #5. Point transformations (cont.) Histogram transformations. Intro to neighborhoods and spatial filtering
 Histogram transformations. Intro to neighborhoods and spatial filtering") Lecture #5 Point transformations (cont.) Histogram transformations Equalization Specification Local vs. global operations Intro to neighborhoods and spatial filtering Brightness & Contrast 2002 R. C. Gonzalez
Lecture #5 Point transformations (cont.) Histogram transformations Equalization Specification Local vs. global operations Intro to neighborhoods and spatial filtering Brightness & Contrast 2002 R. C. Gonzalez
AP Physics: Curved Mirrors and Lenses
 The Ray Model of Light Light often travels in straight lines. We represent light using rays, which are straight lines emanating from an object. This is an idealization, but is very useful for geometric
The Ray Model of Light Light often travels in straight lines. We represent light using rays, which are straight lines emanating from an object. This is an idealization, but is very useful for geometric
LIGHT & OPTICS. Fundamentals of Physics 2112 Chapter 34 1
 LIGHT & OPTICS Fundamentals of Physics 22 Chapter 34 Chapter 34 Images. Two Types of Images 2. Plane Mirrors 3. Spherical Mirrors 4. Images from Spherical Mirrors 5. Spherical Refracting Surfaces 6. Thin
LIGHT & OPTICS Fundamentals of Physics 22 Chapter 34 Chapter 34 Images. Two Types of Images 2. Plane Mirrors 3. Spherical Mirrors 4. Images from Spherical Mirrors 5. Spherical Refracting Surfaces 6. Thin
Sampling and Reconstruction
 Sampling and Reconstruction Sampling and Reconstruction Sampling and Spatial Resolution Spatial Aliasing Problem: Spatial aliasing is insufficient sampling of data along the space axis, which occurs because
Sampling and Reconstruction Sampling and Reconstruction Sampling and Spatial Resolution Spatial Aliasing Problem: Spatial aliasing is insufficient sampling of data along the space axis, which occurs because
Ulrik Söderström 17 Jan Image Processing. Introduction
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 17 Jan 2017 Image Processing Introduction Image Processsing Typical goals: Improve images for human interpretation Image processing Processing of images for
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 17 Jan 2017 Image Processing Introduction Image Processsing Typical goals: Improve images for human interpretation Image processing Processing of images for
Computer Graphics - Chapter 1 Graphics Systems and Models
 Computer Graphics - Chapter 1 Graphics Systems and Models Objectives are to learn about: Applications of Computer Graphics Graphics Systems Images: Physical and Synthetic The Human Visual System The Pinhole
Computer Graphics - Chapter 1 Graphics Systems and Models Objectives are to learn about: Applications of Computer Graphics Graphics Systems Images: Physical and Synthetic The Human Visual System The Pinhole
The Lens. Refraction and The Lens. Figure 1a:
 Lenses are used in many different optical devices. They are found in telescopes, binoculars, cameras, camcorders and eyeglasses. Even your eye contains a lens that helps you see objects at different distances.
Lenses are used in many different optical devices. They are found in telescopes, binoculars, cameras, camcorders and eyeglasses. Even your eye contains a lens that helps you see objects at different distances.
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
Fotonic E-series User Manual
 Fotonic E-series User Manual Document number 402660 Rev F 24/06/2015 WARNING! Do not under any circumstances use the camera without first reading the entire Quick Start Guide and User Manual. 1. Introduction...
Fotonic E-series User Manual Document number 402660 Rev F 24/06/2015 WARNING! Do not under any circumstances use the camera without first reading the entire Quick Start Guide and User Manual. 1. Introduction...
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Introduction to Computer Vision. Week 3, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
Preparatory School to the Winter College on Optics in Imaging Science January Selected Topics of Fourier Optics Tutorial
 2222-11 Preparatory School to the Winter College on Optics in Imaging Science 24-28 January 2011 Selected Topics of Fourier Optics Tutorial William T. Rhodes Florida Atlantic University Boca Raton USA
2222-11 Preparatory School to the Winter College on Optics in Imaging Science 24-28 January 2011 Selected Topics of Fourier Optics Tutorial William T. Rhodes Florida Atlantic University Boca Raton USA
Full Field Displacement and Strain Measurement. On a Charpy Specimen. Using Digital Image Correlation.
 Full Field Displacement and Strain Measurement On a Charpy Specimen Using Digital Image Correlation. Chapter 1: Introduction to Digital Image Correlation D.I.C. The method of 3-D DIGITAL IMAGE CORRELATION
Full Field Displacement and Strain Measurement On a Charpy Specimen Using Digital Image Correlation. Chapter 1: Introduction to Digital Image Correlation D.I.C. The method of 3-D DIGITAL IMAGE CORRELATION
Motivation. Intensity Levels
 Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Lecture PowerPoint. Chapter 25 Physics: Principles with Applications, 6 th edition Giancoli
 Lecture PowerPoint Chapter 25 Physics: Principles with Applications, 6 th edition Giancoli 2005 Pearson Prentice Hall This work is protected by United States copyright laws and is provided solely for the
Lecture PowerPoint Chapter 25 Physics: Principles with Applications, 6 th edition Giancoli 2005 Pearson Prentice Hall This work is protected by United States copyright laws and is provided solely for the
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections.
 Image Interpolation 48 Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections. Fundamentally, interpolation is the process of using known
Image Interpolation 48 Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections. Fundamentally, interpolation is the process of using known
Image formation. Thanks to Peter Corke and Chuck Dyer for the use of some slides
 Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Ray Optics. Ray model Reflection Refraction, total internal reflection Color dispersion Lenses Image formation Magnification Spherical mirrors
 Ray Optics Ray model Reflection Refraction, total internal reflection Color dispersion Lenses Image formation Magnification Spherical mirrors 1 Ray optics Optical imaging and color in medicine Integral
Ray Optics Ray model Reflection Refraction, total internal reflection Color dispersion Lenses Image formation Magnification Spherical mirrors 1 Ray optics Optical imaging and color in medicine Integral
RASNIK Image Processing with a Steepest Ascent Algorithm
 ATLAS Internal Note MUON-No-092 RASNIK Image Processing with a Steepest Ascent Algorithm Kevan S. Hashemi and James R. Bensinger Brandeis University August 1995 Introduction The RASNIK alignment instrument
ATLAS Internal Note MUON-No-092 RASNIK Image Processing with a Steepest Ascent Algorithm Kevan S. Hashemi and James R. Bensinger Brandeis University August 1995 Introduction The RASNIK alignment instrument
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
How to achieve this goal? (1) Cameras
 Cameras") How to achieve this goal? (1) Cameras History, progression and comparisons of different Cameras and optics. Geometry, Linear Algebra Images Image from Chris Jaynes, U. Kentucky Discrete vs. Continuous
How to achieve this goal? (1) Cameras History, progression and comparisons of different Cameras and optics. Geometry, Linear Algebra Images Image from Chris Jaynes, U. Kentucky Discrete vs. Continuous
The image is virtual and erect. When a mirror is rotated through a certain angle, the reflected ray is rotated through twice this angle.
 1 Class XII: Physics Chapter 9: Ray optics and Optical Instruments Top Concepts 1. Laws of Reflection. The reflection at a plane surface always takes place in accordance with the following two laws: (i)
1 Class XII: Physics Chapter 9: Ray optics and Optical Instruments Top Concepts 1. Laws of Reflection. The reflection at a plane surface always takes place in accordance with the following two laws: (i)
Image Acquisition Image Digitization Spatial domain Intensity domain Image Characteristics
 Image Acquisition Image Digitization Spatial domain Intensity domain Image Characteristics 1 What is an Image? An image is a projection of a 3D scene into a 2D projection plane. An image can be defined
Image Acquisition Image Digitization Spatial domain Intensity domain Image Characteristics 1 What is an Image? An image is a projection of a 3D scene into a 2D projection plane. An image can be defined
Lenses: Focus and Defocus
 Lenses: Focus and Defocus circle of confusion A lens focuses light onto the film There is a specific distance at which objects are in focus other points project to a circle of confusion in the image Changing
Lenses: Focus and Defocus circle of confusion A lens focuses light onto the film There is a specific distance at which objects are in focus other points project to a circle of confusion in the image Changing
2012 Imaging Science Ph.D. Comprehensive Examination June 15, :00AM to 1:00PM IMPORTANT INSTRUCTIONS
 2012 Imaging Science Ph.D. Comprehensive Examination June 15, 2012 9:00AM to 1:00PM IMPORTANT INSTRUCTIONS You must complete two (2) of the three (3) questions given for each of the core graduate classes.
2012 Imaging Science Ph.D. Comprehensive Examination June 15, 2012 9:00AM to 1:00PM IMPORTANT INSTRUCTIONS You must complete two (2) of the three (3) questions given for each of the core graduate classes.
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Modeling Light. On Simulating the Visual Experience
 Modeling Light 15-463: Rendering and Image Processing Alexei Efros On Simulating the Visual Experience Just feed the eyes the right data No one will know the difference! Philosophy: Ancient question: Does
Modeling Light 15-463: Rendering and Image Processing Alexei Efros On Simulating the Visual Experience Just feed the eyes the right data No one will know the difference! Philosophy: Ancient question: Does
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
An introduction to 3D image reconstruction and understanding concepts and ideas
 Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
And. Modal Analysis. Using. VIC-3D-HS, High Speed 3D Digital Image Correlation System. Indian Institute of Technology New Delhi
 Full Field Displacement And Strain Measurement And Modal Analysis Using VIC-3D-HS, High Speed 3D Digital Image Correlation System At Indian Institute of Technology New Delhi VIC-3D, 3D Digital Image Correlation
Full Field Displacement And Strain Measurement And Modal Analysis Using VIC-3D-HS, High Speed 3D Digital Image Correlation System At Indian Institute of Technology New Delhi VIC-3D, 3D Digital Image Correlation
Chapter 23. Geometrical Optics: Mirrors and Lenses and other Instruments
 Chapter 23 Geometrical Optics: Mirrors and Lenses and other Instruments HITT1 A small underwater pool light is 1 m below the surface of a swimming pool. What is the radius of the circle of light on the
Chapter 23 Geometrical Optics: Mirrors and Lenses and other Instruments HITT1 A small underwater pool light is 1 m below the surface of a swimming pool. What is the radius of the circle of light on the
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Cameras and Stereo CSE 455. Linda Shapiro
 Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Image Analysis. 1. A First Look at Image Classification
 Image Analysis Image Analysis 1. A First Look at Image Classification Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Business Economics and Information Systems &
Image Analysis Image Analysis 1. A First Look at Image Classification Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Business Economics and Information Systems &
2D Image Processing INFORMATIK. Kaiserlautern University. DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
 2D Image Processing - Filtering Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 What is image filtering?
2D Image Processing - Filtering Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 What is image filtering?
Image Acquisition + Histograms
 Image Processing - Lesson 1 Image Acquisition + Histograms Image Characteristics Image Acquisition Image Digitization Sampling Quantization Histograms Histogram Equalization What is an Image? An image
Image Processing - Lesson 1 Image Acquisition + Histograms Image Characteristics Image Acquisition Image Digitization Sampling Quantization Histograms Histogram Equalization What is an Image? An image
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Motion. 1 Introduction. 2 Optical Flow. Sohaib A Khan. 2.1 Brightness Constancy Equation
 Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
EXAM SOLUTIONS. Computer Vision Course 2D1420 Thursday, 11 th of march 2003,
 Numerical Analysis and Computer Science, KTH Danica Kragic EXAM SOLUTIONS Computer Vision Course 2D1420 Thursday, 11 th of march 2003, 8.00 13.00 Exercise 1 (5*2=10 credits) Answer at most 5 of the following
Numerical Analysis and Computer Science, KTH Danica Kragic EXAM SOLUTIONS Computer Vision Course 2D1420 Thursday, 11 th of march 2003, 8.00 13.00 Exercise 1 (5*2=10 credits) Answer at most 5 of the following
COMPUTER VISION. Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai
 COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
IMAGE ENHANCEMENT in SPATIAL DOMAIN by Intensity Transformations
 It makes all the difference whether one sees darkness through the light or brightness through the shadows David Lindsay IMAGE ENHANCEMENT in SPATIAL DOMAIN by Intensity Transformations Kalyan Kumar Barik
It makes all the difference whether one sees darkness through the light or brightness through the shadows David Lindsay IMAGE ENHANCEMENT in SPATIAL DOMAIN by Intensity Transformations Kalyan Kumar Barik
CONSISTENT COLOR RESAMPLE IN DIGITAL ORTHOPHOTO PRODUCTION INTRODUCTION
 CONSISTENT COLOR RESAMPLE IN DIGITAL ORTHOPHOTO PRODUCTION Yaron Katzil 1, Yerach Doytsher 2 Mapping and Geo-Information Engineering Faculty of Civil and Environmental Engineering Technion - Israel Institute
CONSISTENT COLOR RESAMPLE IN DIGITAL ORTHOPHOTO PRODUCTION Yaron Katzil 1, Yerach Doytsher 2 Mapping and Geo-Information Engineering Faculty of Civil and Environmental Engineering Technion - Israel Institute
Image Processing using LabVIEW. By, Sandip Nair sandipnair.hpage.com
 Image Processing using LabVIEW By, Sandip Nair sandipnair06@yahoomail.com sandipnair.hpage.com What is image? An image is two dimensional function, f(x,y), where x and y are spatial coordinates, and the
Image Processing using LabVIEW By, Sandip Nair sandipnair06@yahoomail.com sandipnair.hpage.com What is image? An image is two dimensional function, f(x,y), where x and y are spatial coordinates, and the
UNIT VI OPTICS ALL THE POSSIBLE FORMULAE
 58 UNIT VI OPTICS ALL THE POSSIBLE FORMULAE Relation between focal length and radius of curvature of a mirror/lens, f = R/2 Mirror formula: Magnification produced by a mirror: m = - = - Snell s law: 1
58 UNIT VI OPTICS ALL THE POSSIBLE FORMULAE Relation between focal length and radius of curvature of a mirror/lens, f = R/2 Mirror formula: Magnification produced by a mirror: m = - = - Snell s law: 1
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Unit - I Computer vision Fundamentals
 Unit - I Computer vision Fundamentals It is an area which concentrates on mimicking human vision systems. As a scientific discipline, computer vision is concerned with the theory behind artificial systems
Unit - I Computer vision Fundamentals It is an area which concentrates on mimicking human vision systems. As a scientific discipline, computer vision is concerned with the theory behind artificial systems
Computer Graphics. Texture Filtering & Sampling Theory. Hendrik Lensch. Computer Graphics WS07/08 Texturing
 Computer Graphics Texture Filtering & Sampling Theory Hendrik Lensch Overview Last time Texture Parameterization Procedural Shading Today Texturing Filtering 2D Texture Mapping Forward mapping Object surface
Computer Graphics Texture Filtering & Sampling Theory Hendrik Lensch Overview Last time Texture Parameterization Procedural Shading Today Texturing Filtering 2D Texture Mapping Forward mapping Object surface
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
IMPORTANT INSTRUCTIONS
 2017 Imaging Science Ph.D. Qualifying Examination June 9, 2017 9:00AM to 12:00PM IMPORTANT INSTRUCTIONS You must complete two (2) of the three (3) questions given for each of the core graduate classes.
2017 Imaging Science Ph.D. Qualifying Examination June 9, 2017 9:00AM to 12:00PM IMPORTANT INSTRUCTIONS You must complete two (2) of the three (3) questions given for each of the core graduate classes.
Chapter 5 Extraction of color and texture Comunicação Visual Interactiva. image labeled by cluster index
 Chapter 5 Extraction of color and texture Comunicação Visual Interactiva image labeled by cluster index Color images Many images obtained with CCD are in color. This issue raises the following issue ->
Chapter 5 Extraction of color and texture Comunicação Visual Interactiva image labeled by cluster index Color images Many images obtained with CCD are in color. This issue raises the following issue ->
INTRODUCTION TO IMAGE PROCESSING (COMPUTER VISION)
") INTRODUCTION TO IMAGE PROCESSING (COMPUTER VISION) Revision: 1.4, dated: November 10, 2005 Tomáš Svoboda Czech Technical University, Faculty of Electrical Engineering Center for Machine Perception, Prague,
INTRODUCTION TO IMAGE PROCESSING (COMPUTER VISION) Revision: 1.4, dated: November 10, 2005 Tomáš Svoboda Czech Technical University, Faculty of Electrical Engineering Center for Machine Perception, Prague,
Topic 5 Image Compression
 Topic 5 Image Compression Introduction Data Compression: The process of reducing the amount of data required to represent a given quantity of information. Purpose of Image Compression: the reduction of
Topic 5 Image Compression Introduction Data Compression: The process of reducing the amount of data required to represent a given quantity of information. Purpose of Image Compression: the reduction of