Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
|
|
|
- Ophelia Miller
- 6 years ago
- Views:
Transcription
1 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010


2 Overall Goal Given two shapes, find correspondences between them.



3 Overall Goal Given two shapes, find correspondences between them. Finding the best map between a pair of shapes.
4 Applications Manufacturing: One shape is a model and the other is a scan of a product. Finding defects. Medicine: Finding correspondences between 3D MRI scans of the same person or different people. Animation Reconstruction & 3D Video. Statistical Shape Analysis: Building models for a collection of shapes.
5 Applications Statistical Analysis Scan many people. Learn the deformation model (e.g. PCA) Find the principal variation create new random instances. Requires correspondences. female, 65kg A Statistical Model of Human Pose and Body Shape, Hasler et al. Eurographics 09
6 Method Taxonomy Local vs. Global refinement ei e e (e.g. ICP) alignment aig (search).. Rigid vs. Deformable rotation, translation general deformation. Pair vs. Collection two shapes multiple shapes
7 Method Taxonomy Local vs. Global refinement ei e e (e.g. ICP) alignment aig (search).. Solved Rigid vs. Deformable rotation, translation general deformation. Pair vs. Collection two shapes multiple shapes
8 Method Taxonomy Local vs. Global refinement ei e e (e.g. ICP) alignment aig (search).. Rigid vs. Deformable rotation, translation general deformation. Pair vs. Collection two shapes multiple shapes
9 Pairwise Rigid Correspondence Remember ICP: Given a pair of shapes, X and Y, iterate: 1. For each find nearest neighbor. 2. Find deformation minimizing:


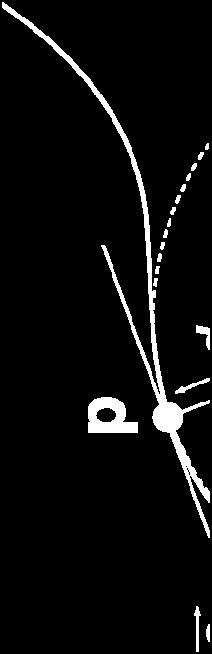


10 Pairwise Rigid Correspondence Geometry of the square distance function Ψ For a curve Ψ, around point. x 1 x 2 To second order: in the Frenet frame at p [ Pottmann and Hofer 2003]
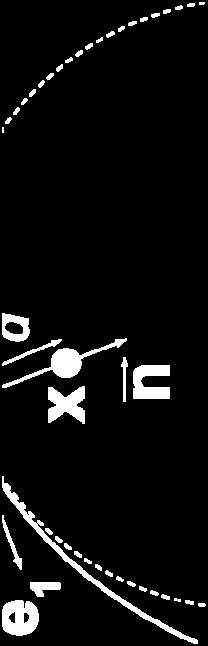
11 Approximate Squared Distance For a curve Ψ, to second order: For a surface Φ, to second order: and are inverse principal curvatures [ Pottmann and Hofer 2003 ]
12 Approximate Squared Distance For a surface Φ, to second order: and are inverse principal curvatures Note that as point to plane point to point to In general neither metric guarantees second order consistency it







13 d 2 (y, Φ P ) Using d2tree Partition the space into cells where each cell stores a quadratic approximant of the squared distance function. 2D 3D LEOPOLDSEDER S et al. d2 tree: A hierarchical representation of the squared distance function
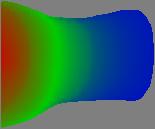
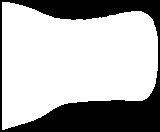
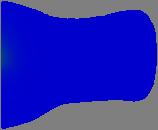
14 Registration using d2tree Build using bottom up approach: fit a quadratic approximation to a fine grid. Merge cells if they have similar approximations. Funnel of Convergence: Translation in x z plane. Rotation about y axis. Converges Does not Does not converge
15 Matching the Bunny to itself point to plane d2tree Registration of Point Cloud Data from a Geometric Optimization Perspective Mitra et al., SGP 2004
16 Matching the Bunny to itself Registration of Point Cloud Data from a Geometric Optimization Perspective Mitra et al., SGP 2004
17 Local Rigid Matching ICP The upshot is that Locally, the point to plane to plane metric provides a second order approximation to the squared distance function. Optimization based on point to plane will converge quadraticaly to the local minimum. Convergence funnel can be narrow, but can improve it with either d2tree or point to point. to What if we are outside the convergence funnel?



18 Global Matching Given shapes in arbitrary positions, find their alignment: Robust Global Registration Gelfand et al. SGP 2005 Can be approximate, since will refine later using e.g. ICP
19 Global Matching Approaches Several classes of approaches: 1. Exhaustive Search 2. Normalization 3. Random Sampling 4. Invariance
20 Exhaustive Search: Compare at all alignments Sample the space of possible initial alignments. Correspondence is determined by the alignment at which models are closest. ICP result angle Very common in biology: e.g., protein docking
21 Exhaustive Search: Compare at all alignments Sample the space of possible initial alignments. Correspondence is determined by the alignment at which models are closest. Provides optimal result Can be unnecessarily slow. Does not generalize to non rigid deformations.







22 Normalization There are only a handful of initial configurations that are important. Can center all shapes at the origin and use PCA to find the principal p directions of the shape. In addition io sometimes e try to all permutations of x y z.



23 Normalization There are only a handful of initial configurations that are important. Works well if we have complete shapes and no noise. Fails for partial scans, outliers, high noise, etc.
24 Random Sampling (RANSAC) ICP only needs 3 point pairs! Robust and Simple approach. Iterate between: 1. Pick a random pair of 3 points on model & scan 2. Estimate alignment, and check for error. Guess and verify




25 Random Sampling (RANSAC) ICP only needs 3 point pairs! Robust and Simple approach. Iterate between: 1. Pick a random pair of 3 points on model & scan 2. Estimate alignment, and check for error. Guess and verify


26 Random Sampling (RANSAC) ICP only needs 3 point pairs! Robust and Simple approach. Iterate between: 1. Pick a random pair of 3 points on model & scan 2. Estimate alignment, and check for error. Guess and verify



27 Random Sampling (RANSAC) ICP only needs 3 point pairs! Robust and Simple approach. Iterate between: 1. Pick a random pair of 3 points on model & scan 2. Estimate alignment, and check for error. Guess and verify
28 Random Sampling (RANSAC) ICP only needs 3 point pairs! Robust and Simple approach. Iterate between: 1. Pick a random pair of 3 points on model & scan 2. Estimate alignment, and check for error. Can also refine the final result. Picks don t have to be exact. Guess and verify
29 Random Sampling (RANSAC) A pair of triples (from P and Q) are enough to determine a rigid transform, resulting in RANSAC. Surprisingly, a special set of 4 points, congruent sets, makes the problem simpler leading to! Co planar points remain coplanar 4 points Congruent Sets for Robust Surface Registration, Aiger et al., SIGGRAPH 2008


30 Method Overview On the source shape, pick 4 (approx.) coplanar points. Compute For every pair destination compute of points on the Those pairs, for which are a good candidate correspondence for. Under mild assumptions the procedure runs in time. 4 points Congruent Sets for Robust Surface Registration, Aiger et al., SIGGRAPH 2008



31 Method Overview Can pick a few base points for partial matching. Random sampling and outliers handles noise 4 points Congruent Sets for Robust Surface Registration, Aiger et al., SIGGRAPH 2008




32 Method Overview Can pick a few base points for partial matching. Partial matches 4 points Congruent Sets for Robust Surface Registration, Aiger et al., SIGGRAPH 2008


33 Method Overview Very robust to noise, fast global alignment. Can further improve efficiency. Still need to local refinement. Can further reduce the number of candidates. Not all points are created equal. Find salient, feature points. 4 points Congruent Sets for Robust Surface Registration, Aiger et al., SIGGRAPH 2008
34 Global Matching Approaches Several classes of approaches: 1. Exhaustive Search 2. Normalization 3. Random Sampling 4. Invariance


35 Global Matching Invariance Try to characterize the shape using properties that are invariant under the desired set of transformations. Conflicting interests invariance vs. informativeness. The most common pipeline: 1. identify salient feature points 2. compute informative and commensurable descriptors.

 Partially Overlapping")
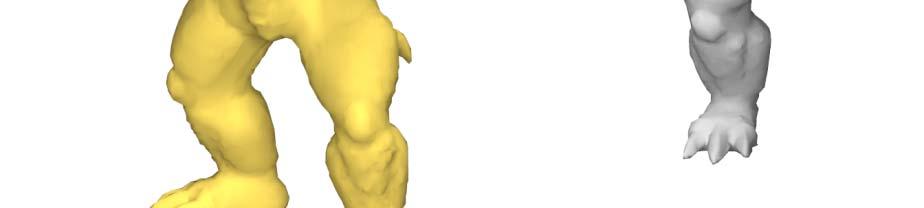
36 Matching Using Feature Points 1. Find feature points on the two scans (we ll come back to that issue) Partially Overlapping Scans 36
37 Approach 1. (Find feature points on the two scans) p 2. Establish correspondences Partially Overlapping Scans
38 Approach 1. (Find feature points on the two scans) p 2. Establish correspondences 3. Compute the aligning transformation Partially Overlapping Scans Aligned Scans
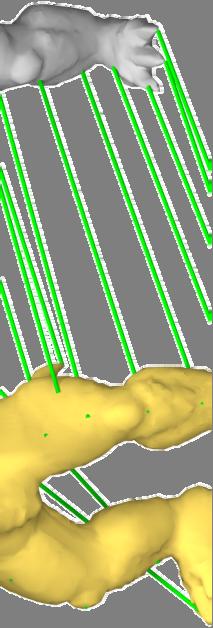
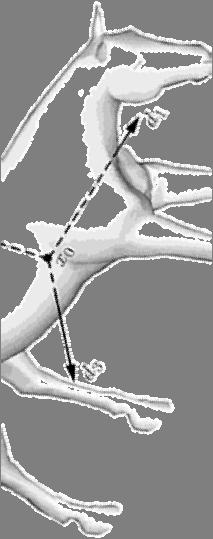
39 Correspondence Goal: y when two p points on different scans Identify represent the same feature?
40 Correspondence Goal: y when two p points on different scans Identify represent the same feature: Are the surrounding regions similar??
41 Correspondence Goal: y when two p points on different scans Identify represent the same feature: Are the surrounding regions similar??
42 Main Question How to compare regions on the shape in an invariant manner? A large variety of descriptors have been suggested. To give an example, I ll describe two. table by Will Chang








43 Spin Images Creates an image associated with a neighborhood of a point. Compare points by comparing their spin images (2D). Given a point and a normal, every other point is indexed d by two parameters: distance to tangent plane distance to normal line Using Spin Images for Efficient Object Recognition in Cluttered 3D Scenes Johnson et al, PAMI 99
44 Integral Volume Descriptor Integral invariant signatures, Manay et al. ECCV 2004 Integral Invariants for Robust Geometry Processing, Pottmann et al Robust Global Registration, Gelfand et al. 2005
45 Feature Based Methods Once we have a feature descriptor, we can find the most unusual one: feature detection. Establish correspondences by first finding reliable ones. Propagate the matches everywhere. To backtrack use branch and bound. Robust Global Registration, Gelfand et al. 2005
46 Method Taxonomy Local vs. Global refinement ei e e (e.g. ICP) alignment aig (search).. Rigid vs. Deformable rotation, translation general deformation. Pair vs. Collection two shapes multiple shapes






47 Deformable Shape Matching No shape is completely l df deformable. Every df deformable shape matching method uses some deformation model. Local Deformable Matching: Wand et al. SGP 07 Li et al. SGP 08 Each coordinate becomes an unknown. Use smoothness, elasticity constraints. Resulting problem is always non linear.


48 Deformable Shape Matching Global/Local Deformable Matching Models: Most common deformation model: intrinsic isometries. A deformation that preserves geodesic distances. Recall that rigid deformations preserve extrinsic distances. Isometric deformation model is useful in matching humans, animals, cloth, some molecular data, etc.
49 Related Work Most global deformable matching methods use isometric deformation model. GMDS Bronstein et al. PNAS 06 Optimization is non convex, performed on a small subset of points. Need an initial guess.


50 Related Work Most global deformable matching methods use isometric deformation model. GMDS Bronstein et al. PNAS 06 Huang et al. SGP 08 Find a few landmark correspondences, extend them using geodesic coordinates.
51 Deformable Shape Matching To define descriptors identify what is preserved under the given class of deformations. Isometric deformations preserve geodesic distances. And: 1. Gaussian Curvature at each point. 2. Laplace Beltrami Operator and its properties p (eigenvalues, eigenvectors). 3. Heat Diffusion process.



52 Heat Equation on a Manifold Heat kernel : amount of heat transferred from to in time.
53 Heat Kernel Signature HKS(p) = : amount of heat lft left at p at time t. Signature of a point is a function of one variable. Invariant to isometric deformations. Moreover complete: Any continuous map between shapes that preserves HKS must preserve all distances. A Concise and Provably Informative, Sun et al., SGP 2009
54 Conclusion Shape Mthi Matching is an active area of research. Local rigid id matching works well. Many approaches to global matching. Work well depending on the domain. Non rigid matching is much harder. Isometric deformation model is common, and useful but limiting. Research problems: other deformation models, consistent p matching with many shapes, robust deformable matching.
INFO0948 Fitting and Shape Matching
 INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Computing and Processing Correspondences with Functional Maps
 Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Registration of Dynamic Range Images
 Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Global Shape Matching
 Global Shape Matching Section 3.2: Extrinsic Key Point Detection and Feature Descriptors 1 The story so far Problem statement Given pair of shapes/scans, find correspondences between the shapes Local shape
Global Shape Matching Section 3.2: Extrinsic Key Point Detection and Feature Descriptors 1 The story so far Problem statement Given pair of shapes/scans, find correspondences between the shapes Local shape
Geometric Registration for Deformable Shapes 1.1 Introduction
 Geometric Registration for Deformable Shapes 1.1 Introduction Overview Data Sources and Applications Problem Statement Overview Presenters Will Chang University of California at San Diego, USA Hao Li ETH
Geometric Registration for Deformable Shapes 1.1 Introduction Overview Data Sources and Applications Problem Statement Overview Presenters Will Chang University of California at San Diego, USA Hao Li ETH
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching
 Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
04 - Normal Estimation, Curves
 04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
Geometric Registration for Deformable Shapes 2.2 Deformable Registration
 Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Posture Invariant Surface Description and Feature Extraction
 Posture Invariant Surface Description and Feature Extraction Stefanie Wuhrer 1 Zouhour Ben Azouz 2 Chang Shu 1 Abstract We propose a posture invariant surface descriptor for triangular meshes. Using intrinsic
Posture Invariant Surface Description and Feature Extraction Stefanie Wuhrer 1 Zouhour Ben Azouz 2 Chang Shu 1 Abstract We propose a posture invariant surface descriptor for triangular meshes. Using intrinsic
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Algorithm research of 3D point cloud registration based on iterative closest point 1
 Acta Technica 62, No. 3B/2017, 189 196 c 2017 Institute of Thermomechanics CAS, v.v.i. Algorithm research of 3D point cloud registration based on iterative closest point 1 Qian Gao 2, Yujian Wang 2,3,
Acta Technica 62, No. 3B/2017, 189 196 c 2017 Institute of Thermomechanics CAS, v.v.i. Algorithm research of 3D point cloud registration based on iterative closest point 1 Qian Gao 2, Yujian Wang 2,3,
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
Tracking system. Danica Kragic. Object Recognition & Model Based Tracking
 Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
5.2 Surface Registration
 Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Stochastic Optimization for Rigid Point Set Registration
 Stochastic Optimization for Rigid Point Set Registration Chavdar Papazov and Darius Burschka Machine Vision and Perception Group (MVP) Department of Computer Science Technische Universität München, Germany
Stochastic Optimization for Rigid Point Set Registration Chavdar Papazov and Darius Burschka Machine Vision and Perception Group (MVP) Department of Computer Science Technische Universität München, Germany
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Geometric Modeling Summer Semester 2012 Point-Based Modeling
 Geometric Modeling Summer Semester 2012 Point-Based Modeling 3D Scanning MLS-Surfaces Reconstruction & Registration Overview... Topics: Subdivision Surfaces Implicit Functions Variational Modeling Point-Based
Geometric Modeling Summer Semester 2012 Point-Based Modeling 3D Scanning MLS-Surfaces Reconstruction & Registration Overview... Topics: Subdivision Surfaces Implicit Functions Variational Modeling Point-Based
Algorithms for 3D Isometric Shape Correspondence
 Algorithms for 3D Isometric Shape Correspondence Yusuf Sahillioğlu Computer Eng. Dept., Koç University, Istanbul, Turkey (PhD) Computer Eng. Dept., METU, Ankara, Turkey (Asst. Prof.) 2 / 53 Problem Definition
Algorithms for 3D Isometric Shape Correspondence Yusuf Sahillioğlu Computer Eng. Dept., Koç University, Istanbul, Turkey (PhD) Computer Eng. Dept., METU, Ankara, Turkey (Asst. Prof.) 2 / 53 Problem Definition
Introduction to geometry
 1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
Non-rigid shape correspondence by matching semi-local spectral features and global geodesic structures
 Non-rigid shape correspondence by matching semi-local spectral features and global geodesic structures Anastasia Dubrovina Technion Israel Institute of Technology Introduction Correspondence detection
Non-rigid shape correspondence by matching semi-local spectral features and global geodesic structures Anastasia Dubrovina Technion Israel Institute of Technology Introduction Correspondence detection
Surface Reconstruction. Gianpaolo Palma
 Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
Surface Reconstruction Gianpaolo Palma Surface reconstruction Input Point cloud With or without normals Examples: multi-view stereo, union of range scan vertices Range scans Each scan is a triangular mesh
RELATIVE SCALE ESTIMATION AND 3D REGISTRATION OF MULTI-MODAL GEOMETRY USING GROWING LEAST SQUARES
 RELATIVE SCALE ESTIMATION AND 3D REGISTRATION OF MULTI-MODAL GEOMETRY USING GROWING LEAST SQUARES Nicolas Mellado Matteo Dellepiane Université de Toulouse University College London Visual Computing Lab,
RELATIVE SCALE ESTIMATION AND 3D REGISTRATION OF MULTI-MODAL GEOMETRY USING GROWING LEAST SQUARES Nicolas Mellado Matteo Dellepiane Université de Toulouse University College London Visual Computing Lab,
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
Def De orma f tion orma Disney/Pixar
 Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Graphics. Automatic Efficient to compute Smooth Low-distortion Defined for every point Aligns semantic features. Other disciplines
 Goal: Find a map between surfaces Blended Intrinsic Maps Vladimir G. Kim Yaron Lipman Thomas Funkhouser Princeton University Goal: Find a map between surfaces Automatic Efficient to compute Smooth Low-distortion
Goal: Find a map between surfaces Blended Intrinsic Maps Vladimir G. Kim Yaron Lipman Thomas Funkhouser Princeton University Goal: Find a map between surfaces Automatic Efficient to compute Smooth Low-distortion
Invariant shape similarity. Invariant shape similarity. Invariant similarity. Equivalence. Equivalence. Equivalence. Equal SIMILARITY TRANSFORMATION
 1 Invariant shape similarity Alexer & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book 2 Invariant shape similarity 048921 Advanced topics in vision Processing Analysis
1 Invariant shape similarity Alexer & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book 2 Invariant shape similarity 048921 Advanced topics in vision Processing Analysis
Dynamic Geometry Processing
 Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
Compu&ng Correspondences in Geometric Datasets. 4.2 Symmetry & Symmetriza/on
 Compu&ng Correspondences in Geometric Datasets 4.2 Symmetry & Symmetriza/on Symmetry Invariance under a class of transformations Reflection Translation Rotation Reflection + Translation + global vs. partial
Compu&ng Correspondences in Geometric Datasets 4.2 Symmetry & Symmetriza/on Symmetry Invariance under a class of transformations Reflection Translation Rotation Reflection + Translation + global vs. partial
Topology-Invariant Similarity and Diffusion Geometry
 1 Topology-Invariant Similarity and Diffusion Geometry Lecture 7 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Intrinsic
1 Topology-Invariant Similarity and Diffusion Geometry Lecture 7 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Intrinsic
Multidimensional scaling
 Multidimensional scaling Lecture 5 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Cinderella 2.0 2 If it doesn t fit,
Multidimensional scaling Lecture 5 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Cinderella 2.0 2 If it doesn t fit,
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Recognizing Deformable Shapes. Salvador Ruiz Correa UW Ph.D. Graduate Researcher at Children s Hospital
 Recognizing Deformable Shapes Salvador Ruiz Correa UW Ph.D. Graduate Researcher at Children s Hospital Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable
Recognizing Deformable Shapes Salvador Ruiz Correa UW Ph.D. Graduate Researcher at Children s Hospital Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable
Geometric Modeling and Processing
 Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 4. Geometric Registration 4.1 Rigid Registration Range Scanning: Reconstruction Set of raw scans Reconstructed
Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 4. Geometric Registration 4.1 Rigid Registration Range Scanning: Reconstruction Set of raw scans Reconstructed
Mathematical Tools for 3D Shape Analysis and Description
 outline Mathematical Tools for 3D Shape Analysis and Description SGP 2013 Graduate School Silvia Biasotti, Andrea Cerri, Michela Spagnuolo Istituto di Matematica Applicata e Tecnologie Informatiche E.
outline Mathematical Tools for 3D Shape Analysis and Description SGP 2013 Graduate School Silvia Biasotti, Andrea Cerri, Michela Spagnuolo Istituto di Matematica Applicata e Tecnologie Informatiche E.
How Much Geometry Lies in The Laplacian?
 How Much Geometry Lies in The Laplacian? Encoding and recovering the discrete metric on triangle meshes Distance Geometry Workshop in Bad Honnef, November 23, 2017 Maks Ovsjanikov Joint with: E. Corman,
How Much Geometry Lies in The Laplacian? Encoding and recovering the discrete metric on triangle meshes Distance Geometry Workshop in Bad Honnef, November 23, 2017 Maks Ovsjanikov Joint with: E. Corman,
Shape Matching for 3D Retrieval and Recognition. Agenda. 3D collections. Ivan Sipiran and Benjamin Bustos
 Shape Matching for 3D Retrieval and Recognition Ivan Sipiran and Benjamin Bustos PRISMA Research Group Department of Computer Science University of Chile Agenda Introduction Applications Datasets Shape
Shape Matching for 3D Retrieval and Recognition Ivan Sipiran and Benjamin Bustos PRISMA Research Group Department of Computer Science University of Chile Agenda Introduction Applications Datasets Shape
Distance Functions 1
 Distance Functions 1 Distance function Given: geometric object F (curve, surface, solid, ) Assigns to each point the shortest distance from F Level sets of the distance function are trimmed offsets F p
Distance Functions 1 Distance function Given: geometric object F (curve, surface, solid, ) Assigns to each point the shortest distance from F Level sets of the distance function are trimmed offsets F p
Recognizing Deformable Shapes. Salvador Ruiz Correa Ph.D. UW EE
 Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. UW EE Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes from range data.
Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. UW EE Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes from range data.
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Recognizing Deformable Shapes. Salvador Ruiz Correa (CSE/EE576 Computer Vision I)
") Recognizing Deformable Shapes Salvador Ruiz Correa (CSE/EE576 Computer Vision I) Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes
Recognizing Deformable Shapes Salvador Ruiz Correa (CSE/EE576 Computer Vision I) Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes
CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018
 CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018 Homework #3 v4: Shape correspondences, shape matching, multi-way alignments. [100
CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018 Homework #3 v4: Shape correspondences, shape matching, multi-way alignments. [100
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Easy modeling generate new shapes by deforming existing ones
 Deformation I Deformation Motivation Easy modeling generate new shapes by deforming existing ones Motivation Easy modeling generate new shapes by deforming existing ones Motivation Character posing for
Deformation I Deformation Motivation Easy modeling generate new shapes by deforming existing ones Motivation Easy modeling generate new shapes by deforming existing ones Motivation Character posing for
Digital Geometry Processing
 Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Geometric Data. Goal: describe the structure of the geometry underlying the data, for interpretation or summary
 Geometric Data - ma recherche s inscrit dans le contexte de l analyse exploratoire des donnees, dont l obj Input: point cloud equipped with a metric or (dis-)similarity measure data point image/patch,
Geometric Data - ma recherche s inscrit dans le contexte de l analyse exploratoire des donnees, dont l obj Input: point cloud equipped with a metric or (dis-)similarity measure data point image/patch,
Matching and Recognition in 3D. Based on slides by Tom Funkhouser and Misha Kazhdan
 Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Hierarchical matching of non-rigid shapes
 Hierarchical matching of non-rigid shapes Dan Raviv, Anastasia Dubrovina, and Ron Kimmel Technion - Israel Institute of Technology Abstract. Detecting similarity between non-rigid shapes is one of the
Hierarchical matching of non-rigid shapes Dan Raviv, Anastasia Dubrovina, and Ron Kimmel Technion - Israel Institute of Technology Abstract. Detecting similarity between non-rigid shapes is one of the
Research in Computational Differential Geomet
 Research in Computational Differential Geometry November 5, 2014 Approximations Often we have a series of approximations which we think are getting close to looking like some shape. Approximations Often
Research in Computational Differential Geometry November 5, 2014 Approximations Often we have a series of approximations which we think are getting close to looking like some shape. Approximations Often
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Semi-Automatic Prediction of Landmarks on Human Models in Varying Poses
 Semi-Automatic Prediction of Landmarks on Human Models in Varying Poses Stefanie Wuhrer Zouhour Ben Azouz Chang Shu National Research Council of Canada, Ottawa, Ontario, Canada {stefanie.wuhrer, zouhour.benazouz,
Semi-Automatic Prediction of Landmarks on Human Models in Varying Poses Stefanie Wuhrer Zouhour Ben Azouz Chang Shu National Research Council of Canada, Ottawa, Ontario, Canada {stefanie.wuhrer, zouhour.benazouz,
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Perception. CS 4495 Computer Vision K. Hawkins. CS 4495 Computer Vision. 3D Perception. Kelsey Hawkins Robotics
 CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
Topological Mapping. Discrete Bayes Filter
 Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Discovering Similarities in 3D Data
 Discovering Similarities in 3D Data Vladimir Kim, Tianqiang Liu, Sid Chaudhuri, Steve Diverdi, Wilmot Li, Niloy Mitra, Yaron Lipman, Thomas Funkhouser Motivation 3D data is widely available Medicine Mechanical
Discovering Similarities in 3D Data Vladimir Kim, Tianqiang Liu, Sid Chaudhuri, Steve Diverdi, Wilmot Li, Niloy Mitra, Yaron Lipman, Thomas Funkhouser Motivation 3D data is widely available Medicine Mechanical
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
Preparation Meeting. Recent Advances in the Analysis of 3D Shapes. Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers
 Preparation Meeting Recent Advances in the Analysis of 3D Shapes Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers What You Will Learn in the Seminar Get an overview on state of the art
Preparation Meeting Recent Advances in the Analysis of 3D Shapes Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers What You Will Learn in the Seminar Get an overview on state of the art
CS 468 Data-driven Shape Analysis. Shape Descriptors
 CS 468 Data-driven Shape Analysis Shape Descriptors April 1, 2014 What Is A Shape Descriptor? Shapes Shape Descriptor F1=[f1, f2,.., fn] F2=[f1, f2,.., fn] F3=[f1, f2,.., fn] What Is A Shape Descriptor?
CS 468 Data-driven Shape Analysis Shape Descriptors April 1, 2014 What Is A Shape Descriptor? Shapes Shape Descriptor F1=[f1, f2,.., fn] F2=[f1, f2,.., fn] F3=[f1, f2,.., fn] What Is A Shape Descriptor?
Justin Solomon MIT, Spring Numerical Geometry of Nonrigid Shapes
 Justin Solomon MIT, Spring 2017 Numerical Geometry of Nonrigid Shapes Intrinsically far Extrinsically close Geodesic distance [jee-uh-des-ik dis-tuh-ns]: Length of the shortest path, constrained not to
Justin Solomon MIT, Spring 2017 Numerical Geometry of Nonrigid Shapes Intrinsically far Extrinsically close Geodesic distance [jee-uh-des-ik dis-tuh-ns]: Length of the shortest path, constrained not to
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Mesh Processing Pipeline
 Mesh Smoothing 1 Mesh Processing Pipeline... Scan Reconstruct Clean Remesh 2 Mesh Quality Visual inspection of sensitive attributes Specular shading Flat Shading Gouraud Shading Phong Shading 3 Mesh Quality
Mesh Smoothing 1 Mesh Processing Pipeline... Scan Reconstruct Clean Remesh 2 Mesh Quality Visual inspection of sensitive attributes Specular shading Flat Shading Gouraud Shading Phong Shading 3 Mesh Quality
Geodesics in heat: A new approach to computing distance
 Geodesics in heat: A new approach to computing distance based on heat flow Diana Papyan Faculty of Informatics - Technische Universität München Abstract In this report we are going to introduce new method
Geodesics in heat: A new approach to computing distance based on heat flow Diana Papyan Faculty of Informatics - Technische Universität München Abstract In this report we are going to introduce new method
The correspondence problem. A classic problem. A classic problem. Deformation-Drive Shape Correspondence. Fundamental to geometry processing
 The correspondence problem Deformation-Drive Shape Correspondence Hao (Richard) Zhang 1, Alla Sheffer 2, Daniel Cohen-Or 3, Qingnan Zhou 2, Oliver van Kaick 1, and Andrea Tagliasacchi 1 July 3, 2008 1
The correspondence problem Deformation-Drive Shape Correspondence Hao (Richard) Zhang 1, Alla Sheffer 2, Daniel Cohen-Or 3, Qingnan Zhou 2, Oliver van Kaick 1, and Andrea Tagliasacchi 1 July 3, 2008 1
Geometric Modeling in Graphics
 Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
What is Computer Vision?
 Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Fast marching methods
 1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Towards Multi-scale Heat Kernel Signatures for Point Cloud Models of Engineering Artifacts
 Towards Multi-scale Heat Kernel Signatures for Point Cloud Models of Engineering Artifacts Reed M. Williams and Horea T. Ilieş Department of Mechanical Engineering University of Connecticut Storrs, CT
Towards Multi-scale Heat Kernel Signatures for Point Cloud Models of Engineering Artifacts Reed M. Williams and Horea T. Ilieş Department of Mechanical Engineering University of Connecticut Storrs, CT
Numerical Geometry of Nonrigid Shapes. CS 468, Spring 2013 Differential Geometry for Computer Science Justin Solomon and Adrian Butscher
 Numerical Geometry of Nonrigid Shapes CS 468, Spring 2013 Differential Geometry for Computer Science Justin Solomon and Adrian Butscher Intrinsically far Extrinsically close Straightest Geodesics on Polyhedral
Numerical Geometry of Nonrigid Shapes CS 468, Spring 2013 Differential Geometry for Computer Science Justin Solomon and Adrian Butscher Intrinsically far Extrinsically close Straightest Geodesics on Polyhedral
#$ % $ $& "$%% " $ '$ " '
 ! " This section of the course covers techniques for pairwise (i.e., scanto-scan) and global (i.e., involving more than 2 scans) alignment, given that the algorithms are constrained to obtain a rigid-body
! " This section of the course covers techniques for pairwise (i.e., scanto-scan) and global (i.e., involving more than 2 scans) alignment, given that the algorithms are constrained to obtain a rigid-body
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
A Segmentation of Non-rigid Shape with Heat Diffuse
 2012 4th International Conference on Signal Processing Systems (ICSPS 2012) IPCSIT vol. 58 (2012) (2012) IACSIT Press, Singapore DOI: 10.7763/IPCSIT.2012.V58.6 A Segmentation of Non-rigid Shape with Heat
2012 4th International Conference on Signal Processing Systems (ICSPS 2012) IPCSIT vol. 58 (2012) (2012) IACSIT Press, Singapore DOI: 10.7763/IPCSIT.2012.V58.6 A Segmentation of Non-rigid Shape with Heat
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
3D Shape Registration using Regularized Medial Scaffolds
 3D Shape Registration using Regularized Medial Scaffolds 3DPVT 2004 Thessaloniki, Greece Sep. 6-9, 2004 Ming-Ching Chang Frederic F. Leymarie Benjamin B. Kimia LEMS, Division of Engineering, Brown University
3D Shape Registration using Regularized Medial Scaffolds 3DPVT 2004 Thessaloniki, Greece Sep. 6-9, 2004 Ming-Ching Chang Frederic F. Leymarie Benjamin B. Kimia LEMS, Division of Engineering, Brown University
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Template Matching Rigid Motion. Find transformation to align two images. Focus on geometric features
 Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Greedy Routing with Guaranteed Delivery Using Ricci Flow
 Greedy Routing with Guaranteed Delivery Using Ricci Flow Jie Gao Stony Brook University Joint work with Rik Sarkar, Xiaotian Yin, Wei Zeng, Feng Luo, Xianfeng David Gu Greedy Routing Assign coordinatesto
Greedy Routing with Guaranteed Delivery Using Ricci Flow Jie Gao Stony Brook University Joint work with Rik Sarkar, Xiaotian Yin, Wei Zeng, Feng Luo, Xianfeng David Gu Greedy Routing Assign coordinatesto
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Motivation. Parametric Curves (later Surfaces) Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)
 Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)") Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/fa10 Motivation Moving from rendering to simulation,
Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/fa10 Motivation Moving from rendering to simulation,
Mirror-symmetry in images and 3D shapes
 Journées de Géométrie Algorithmique CIRM Luminy 2013 Mirror-symmetry in images and 3D shapes Viorica Pătrăucean Geometrica, Inria Saclay Symmetry is all around... In nature: mirror, rotational, helical,
Journées de Géométrie Algorithmique CIRM Luminy 2013 Mirror-symmetry in images and 3D shapes Viorica Pătrăucean Geometrica, Inria Saclay Symmetry is all around... In nature: mirror, rotational, helical,
A Multi-Resolution ICP with Heuristic Closest Point Search for Fast and Robust 3D Registration of Range Images
 A Multi-Resolution ICP with Heuristic Closest Point Search for Fast and Robust 3D Registration of Range Images Timothée Jost and Heinz Hügli Institute of Microtechnology, University of Neuchâtel, Breguet
A Multi-Resolution ICP with Heuristic Closest Point Search for Fast and Robust 3D Registration of Range Images Timothée Jost and Heinz Hügli Institute of Microtechnology, University of Neuchâtel, Breguet
Finding Structure in Large Collections of 3D Models
 Finding Structure in Large Collections of 3D Models Vladimir Kim Adobe Research Motivation Explore, Analyze, and Create Geometric Data Real Virtual Motivation Explore, Analyze, and Create Geometric Data
Finding Structure in Large Collections of 3D Models Vladimir Kim Adobe Research Motivation Explore, Analyze, and Create Geometric Data Real Virtual Motivation Explore, Analyze, and Create Geometric Data
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Exploring Collections of 3D Models using Fuzzy Correspondences
 Exploring Collections of 3D Models using Fuzzy Correspondences Vladimir G. Kim Wilmot Li Niloy J. Mitra Princeton University Adobe UCL Stephen DiVerdi Adobe Thomas Funkhouser Princeton University Motivating
Exploring Collections of 3D Models using Fuzzy Correspondences Vladimir G. Kim Wilmot Li Niloy J. Mitra Princeton University Adobe UCL Stephen DiVerdi Adobe Thomas Funkhouser Princeton University Motivating
Efficient regularization of functional map computations
 Efficient regularization of functional map computations Flows, mappings and shapes VMVW03 Workshop December 12 th, 2017 Maks Ovsjanikov Joint with: E. Corman, D. Nogneng, R. Huang, M. Ben-Chen, J. Solomon,
Efficient regularization of functional map computations Flows, mappings and shapes VMVW03 Workshop December 12 th, 2017 Maks Ovsjanikov Joint with: E. Corman, D. Nogneng, R. Huang, M. Ben-Chen, J. Solomon,
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Stable and Multiscale Topological Signatures
 Stable and Multiscale Topological Signatures Mathieu Carrière, Steve Oudot, Maks Ovsjanikov Inria Saclay Geometrica April 21, 2015 1 / 31 Shape = point cloud in R d (d = 3) 2 / 31 Signature = mathematical
Stable and Multiscale Topological Signatures Mathieu Carrière, Steve Oudot, Maks Ovsjanikov Inria Saclay Geometrica April 21, 2015 1 / 31 Shape = point cloud in R d (d = 3) 2 / 31 Signature = mathematical