Three-dimensional nondestructive evaluation of cylindrical objects (pipe) using an infrared camera coupled to a 3D scanner
|
|
|
- Lindsay Lawrence
- 6 years ago
- Views:
Transcription
1 Three-dimensional nondestructive evaluation of cylindrical objects (pipe) using an infrared camera coupled to a 3D scanner F. B. Djupkep Dizeu, S. Hesabi, D. Laurendeau, A. Bendada Computer Vision and Systems Laboratory, Laval University 1065, avenue de la Médecine, Québec City (QC), G1V 0A6, Canada Tel : (418) , Fax: (418) dizeubilly@yahoo.fr, s.hesabi12@gmail.com,{denis.laurendeau, hakim.bendada}@gel.ulaval.ca Abstract On the basis of its thermal behavior, the state of an object can be evaluated, without damages and without contact, using infrared thermography. The result of the nondestructive evaluation of an object can be qualitative (location of areas with defects) or quantitative (determination of the defects depth and size). In this paper, we use infrared thermography for the quantitative nondestructive evaluation of a long cylindrical object. In order to improve the results accuracy and for visual rendering, a three-dimensional formulation of the thermal nondestructive evaluation is adopted. The acquisition system is comprised of an infrared camera and a 3D scanner. Both instruments are registered to each other after a calibration procedure. The infrared camera records the time-dependent temperature of the inspected object while it is subjected to an external thermal stimulus, and the 3D scanner provides a set of 3D points representing the surface of the object. These experimental data (temperature and point cloud) are used to reconstruct the internal geometry of the object, i.e., to locate the defects and determine their depth and size, after solving an inverse geometry problem. Because the infrared camera cannot capture the whole object once, acquisition system is moved along the object. All the partial inspection results are put together to form the defects map. An efficient visual rendering is then obtained after that the mesh of the object is textured by the defects map. Keywords: Infrared thermography, nondestructive testing, surface reconstruction, mapping, temporal tracking of the thermal front, 3D scanner. 1/ Introduction Infrared thermography (IRT) has been widely used for qualitative nondestructive testing (NDT) of objects (metallic, non-metallic, composite, etc.) [1]. Qualitative NDT using IRT aims to locate regions of the inspected object where defects may exist. Quantitative NDT is performed when quantitative information such as the size and depth of defects are needed. Current thermal methods implemented for quantitative NDT use a one-dimensional model which make them accurate enough only for planar and almost planar objects with defects of simple geometry [2]. For object with a rather complex geometry, a three-dimensional formulation is necessary to satisfy the requirement of accuracy during quantitative NDT; an inverse geometry problem can then be solved to reconstruct the internal geometry of the inspected object [3-4]. Such an approach is very convenient to monitor the time-evolution of the degradation, due to corrosion for example, of the state of the objects. In this paper we present the results of the quantitative inspection of a cylindrical metallic object 1
2 (pipe). We use a new algorithm, the rear surface reconstruction by temporal tracking of the thermal front (RSR3TF) to determine the actual geometry of the object using the temperature history and the 3D point cloud of its frontal surface [4]. The thermographic data are recorded by an infrared camera, whereas, the point cloud is captured by a 3D scanner. These two devices are calibrated and for a visual rendering; the temperature map as well as the defect map can be used to texture the 3D point cloud. This is particularly appealing for the inspection of a long pipe because the inspecting system (IR camera and 3D scanner) can be moved along the pipe and the inspection results registered in a unique coordinate system. In section 2 we describe the 3D thermal model which forms the direct problem of the inverse geometry problem considered. This inverse problem is solved using the RSR3TF algorithm which is described in section 3. In section 4 we present an overview of the process used to calibrate the IR camera and the 3D scanner. In section 5 the results of the quantitative inspection of a pipe by IRT are presented. We end the paper with a conclusion. 2/ Three-dimensional thermal model for NDT using IRT Figure 1 shows the experimental setup for the three-dimensional NDT using IRT. The internal domain which is actually the object itself is separated from the external domain by two boundaries: the frontal boundary which is observed by the IR camera while it is submitted to an external stimulus and the rear boundary which is unknowns and has to be reconstructed. For an isotropic object the temperature measured on the frontal surface using the IR camera can be numerically computed by solving the heat equation (1) associated to Neumann s boundary conditions (2) and (3) on boundary and respectively. The initial condition is given by equation (4). = + +, (1) $ =,+h +!" # $, $ =h +!" # $,,=0= &, In equations (1) to (4), =(,,) * is the vector of Cartesian coordinates, =, is the temperature at point at time, =, -,., / 0 * is the outward-pointing normal vector at point on the boundary (superscript 1 is the transpose operator), is the thermal diffusivity of the material, h is the convective heat transfer coefficient, " is the emissivity, is the thermal conductivity, is the ambient temperature, # is the mean radiant temperature, & is the initial temperature and, is the heat flux density resulting from the external stimulus which can be a pulsed heating, a step- heating or a periodic heating. (2) (3) (4) 2
3 Due to its ease of coding and implementing, its flexibility, its small computational cost and its great capability to handle complex and changing geometries, a meshless solver is used to find the numerical solution of the 3D thermal model (1)-(4) after the discretization of the domain 468 into a set of 2 nodes generated using the 3D point cloud of frontal surface and the corresponding normal directions (refer to [5] for more details). Figure 1. Setup for the three-dimensional NDT using IRT. 3/ Rear surface reconstruction by temporal tracking of the thermal front Recently a new algorithm, the temporal tracking of the thermal front, has been proposed for defect characterization in NDT using IRT [4]. The basic idea is to consider NDT using IRT as an inverse geometry problem which consists in determining the internal geometry and the rear surface of an object only from the 3D point cloud and the time-dependent temperature of its frontal surface. To achieve this task two steps are necessary: the parametrization of the unknown rear surface and the update of internal geometry while the temporal tracking of the thermal front is performed. Figure 2. Parametrization of the unknown rear surface. Figure 2 shows the parameters allowing the reconstruction of the rear surface. First of all, the frontal surface is represented by its discretized version as a set of 2 nodes 9 :,;=1,2,,2 obtained after resampling its 3D point cloud with given spatial step sizes. Using the discretized version of the frontal surface, the unknown rear surface is parametrized by a set of 2 depths? :,;=1,2,,2 such that: =? : : (5) 3
4 In (5) :,;=1,2,,2 is the outward-pointing normal vector at node 9 : and A :,;= 1,2,,2 are the nodes of the rear surface. The thermal front resulting from the external thermal stimulus has a propagation speed which depends on the thermal diffusivity of the material and a principal propagation direction which is the same as the normal direction to the frontal surface. In an isotropic object, each instant, the penetration depth of the thermal front is the same along the normal direction at each node of the frontal surface. This is summarized in Figure 3a. For each node 9 :,;=1,2,,2, at time 4, the thermal front reaches depth? 4 measured from node 9 : in the direction :. For < 4, there is no temperature change at depth? 4 inside the object. The temperature at depth? 4 starts to increase at time 4. All points situated at the same depth along the normal directions are reached at the same time by the thermal front. For example, Figure 3b shows the typical temperature changes at different depths. At time 7, the thermal front reaches the points C 7, D 7 and E 7 situated at depth? 7. Points C, D and E situated at depth? >? 7 are reached at time > 7, etc. Temperature a b c 0 0 t1 t2 Time t3 (a) (b) Figure 3. Propagation of the thermal front. (a) Possible positions of the rear surface. (b) Temperature history at different depths Let us consider the generic case presented in Figure 4a. At pixel G the rear surface is situated at depth? H. The tracking of the thermal front consists in following the thermal front while it propagates inside the object. In order to move from time to space and reversely from space to time, we use the following relation between time and penetration depth:?= J [6,7]. In the RSR3TF algorithm we first assume that the rear surface is situated at depth? 7 and we verify that the partial error K L, which is the root mean square of the difference between the theoretical temperature of the frontal surface provided by the meshless solver and its real temperature recorded by the IR camera for 0<< 7, is minimal. If it is the case, i.e., K L is minimal, the size of the rear surface is determined by selecting among the pixels of the direct neighborhood of pixel G those for which K L is also minimal. If for pixel G K L is not minimal, the rear surface is situated at a depth greater than? 7 ; the depth? >? 7 is considered and the previous steps is repeated. The typical temperature curves at pixel G for different positions of rear surface are presented in Figure 4
 log( T) d1 d2 d3 d4 d5 log(t) (b) (c) Figure 4. Estimation of the depth of rear surface. (a) Temperature history at pixel G in case of pulsed thermography. (b) Partial error.")
5 4b for a pulsed heating. The corresponding partial error is presented in Figure 4c. It takes a minimal value when the rear surface is assume to be at depth? H. (a) log( T) d1 d2 d3 d4 d5 log(t) (b) (c) Figure 4. Estimation of the depth of rear surface. (a) Temperature history at pixel G in case of pulsed thermography. (b) Partial error. 4/ Mapping IR Information on 3D data 0 E p d1 d2 d3 d4 d5 Depth Figure 5. Acquiring IR data at leapfrog positions of the photogrammetric tracking system 5
 is moved along the pipe and the IR images recorded at the successive positions are such that there is an overlapping between them.")
 after performing the intrinsic calibration of the IR camera followed by the extrinsic calibration of the two sensors.")
 with circular markers to accurately determine the intrinsic parameters.")
6 Figure 5 shows the different steps of the inspection. The acquisition system (3D scanner and IR camera) is moved along the pipe and the IR images recorded at the successive positions are such that there is an overlapping between them. The procedure used to map the IR information (location, size and depth of subsurface defects) onto the 3D point cloud of the inspected object consists in defining the relationship between the coordinate systems of the sensors (3D scanner and IR sensor) after performing the intrinsic calibration of the IR camera followed by the extrinsic calibration of the two sensors. The intrinsic parameters allow building the relationship between the 2D coordinates of a point in the IR image and the coordinates of that point in the sensor 3D coordinates system. We use a 2D planar target (Figure 6) with circular markers to accurately determine the intrinsic parameters. When the 2D planar target is placed close to a large object having a temperature greater/smaller than ambient temperature, the markers becomes visible to the IR camera as they reflect the radiation coming from that object. The coordinates of the centers of the markers in the IR image and in the camera 3D coordinates system are used to determine the intrinsic parameter of the camera [8]. Figure 6. 2D Calibration target for finding intrinsic parameters Figure 7. Non-coplanar tracking model 6 Figure 8. 3D calibration target for finding the calibration matrix M. The extrinsic parameters represent the camera pose in the scene which is a rigid transformation consisting in a rotation and a translation. It is a transformation from the points in the global reference 3D coordinates system of the calibration target to the local reference 3D coordinates system of the camera. By installing retro-reflective markers on the camera that are visible from the photogrammetric tracker, we are able to track the camera and define the transformation between the camera case and the coordinate system of the tracker (see Figure 5). Since the configuration of markers (called the tracking model) has a significant effect on the accuracy of tracking and projection, we built a tracking model as presented in Figure 7 which consists of a planar plate with posts of different lengths in order to improve the accuracy of 3D tracking. However, the transformation matrix form the tracking model attached to the camera case to the camera coordinate system is still unknown. The problem of estimating this calibration matrix is called the tracker-camera calibration problem. Using a precise 3D target (Figure 8) with a known geometry in 3D space that is visible in both sensors, we can close the loop of transformation matrices

 calibration.")
7 MNO=P, as illustrated in Figure 9. The matrix M represents the markers transformation from tracker and is directly available from the tracker. The matrix O represents the extrinsic parameters of camera with respect to the 3D target. It is determined by detecting the white circular points at the top of the posts in a given IR image of the 3D target. The matrix P represents the 3D target s transformation from the tracker. It is determined by scanning the surface of the posts and defining a 3D coordinate system on the 3D target. The calibration matrix is then N = M Q7 PO Q7. Figure 9. Tracker-Camera (2D/IR) calibration. The setup to calibrate the tracker (C-Track) with the camera. The setup consists of the tracker (C-Track), the IR camera and the 3D target. Figure 10. The reprojection error of calibration matrix N. The ellipses detected in the image are presented in red. The circles fitted to the 3D points acquired from the surface of posts are projected on the image which are illustrated in blue for these posts. The error is measured in pixels. The accuracy of mapping the IR information on 3D point cloud is highly dependent on the accuracy of the estimation of the calibration matrix N. This accuracy can be evaluated using the 7
 object inspected.")
; among them we have two flat-bottom defects [ 7 (width:13.5xx; length: 174XX; depth: 3XX) and [ (width:13.")
, [`H (maximal width:7xx; length: 130XX ; minimal depth: 6XX ) and [`$ (maximal width:3xx; Length: 70XX; minimal depth: 7XX).")
: frontal surface. (b): rear surface with defects. (c): 3D point cloud of frontal surface. (d): 3D point cloud of rear surface Figure 12 presents the experimental setup used.")
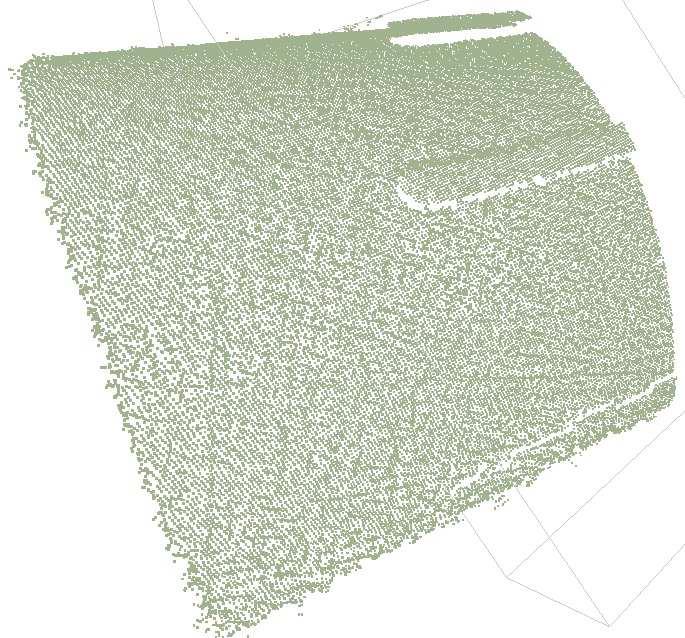
8 reprojection error which can be smaller than 1.06T;UV or 1.17XX (Figure 10). These results indicate that the calibration procedure is efficient and accurate for pipeline inspection. 5/ Experimental results Figure 11 shows the aluminum cylindrical (external radius: 217XX, thickness: 8XX, Heigth: 300XX) object inspected. A thin layer of high emissivity paint has been applied on its frontal surface for accurate temperature measurement with the IR camera (Figure 11a). Several defects have been created on its rear surface (Figure 11b); among them we have two flat-bottom defects [ 7 (width:13.5xx; length: 174XX; depth: 3XX) and [ (width:13.5xx; length: 80XX; depth: 2.5XX), and four triangular defects [`7 (maximal width:9xx; Length: 180XX; minimal depth: 4XX ), [` (maximal width:3xx; Length: 140XX ; minimal depth: 7.5XX ), [`H (maximal width:7xx; length: 130XX ; minimal depth: 6XX ) and [`$ (maximal width:3xx; Length: 70XX; minimal depth: 7XX). The 3D point cloud of the frontal surface and that of the rear surface are presented in Figure 11c and Figure 11d respectively. (a) (b) (c) (d) Figure 11. The inspected cylindrical object. (a): frontal surface. (b): rear surface with defects. (c): 3D point cloud of frontal surface. (d): 3D point cloud of rear surface Figure 12 presents the experimental setup used. The handheld 3D scanner was used to capture the geometry of the frontal surface. The Stimulus source was configured to provide a short pulsed heating (b~10xd. Three positions of the acquisition system were necessary to entirely cover the cylinder. At each position, the thermographic data has been recorded with an acquisition frequency of 574e during 1.5d. 8


: second position of the acquisition system.")


9 Figure 12. Experimental setup used Figure 13 shows the results of the mapping of temperature on frontal surface. (a) (b) (c) (d) Figure 13. Results of the mapping of the temperature on the 3D point cloud of frontal surface. (a): first position of the acquisition system. (b): second position of the acquisition system. (c): third position of the acquisition system. (d): final mapping. The measured temperature history on frontal surface is used to reconstruct the rear surface using the RSR3TF algorithm. The results of the mapping of defects on the frontal surface are presented in Figure 14. Figure 15 shows the same results but with an emphasis on the three-dimensional geometry of the reconstructed rear surface. 9



: third position of the")
 (b) (c) (d) Figure 15.")

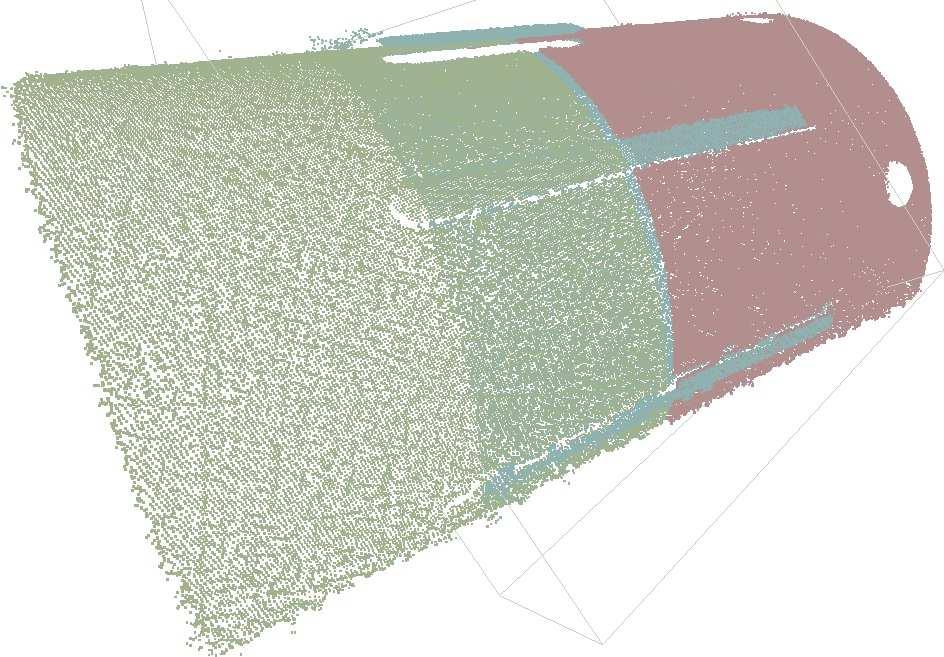
10 (a) (b) (c) (d) Figure 14. Results of the mapping of defects on the 3D point cloud of the frontal surface. (a): first position of the acquisition system. (b): second position of the acquisition system. (c): third position of the acquisition system. (d): final mapping. (a) (b) (c) (d) Figure 15. 3D point cloud of the reconstructed rear surface. (a): first position of the acquisition system. (b): second position of the acquisition system. (c): third position of the acquisition system. (d): final mapping. 10
11 6/ Conclusion We have presented the results of the three-dimensional NDT of a cylindrical object (pipe) using an IR camera coupled to a 3D scanner. The results presented as the mapping of defects on the 3D point cloud of frontal surface are very interesting in terms of reconstruction of the internal geometry of the inspected object as well as for visual rendering of the inspections results. References 1 X. Maldague, Theory and Practice of Infrared Technology for Non Destructive Testing, John-Wiley & Sons, Y. Liu, X. Guo and G. Guo, A comparison between 3D and 1D numerical simulation models for infrared thermographic, NDT Proc. 10th European Conference on Non-Destructive Testing Vol 2, pp , june F. B. Djupkep Dizeu, D. Laurendeau, A. Bendada, An approach for the 3D characterization of internal defects of objects by pulsed infrared thermography, Proc ASNT annual conference, Salt Lake City, USA, pp 28-33, October F. B. Djupkep Dizeu, D. Laurendeau, A. Bendada, Nondestructive testing of objects of complex shape using infrared thermography: rear surface reconstruction by temporal tracking of the thermal front, Inverse Problems (In press). 5F. B. Djupkep Dizeu, D. Laurendeau, A. Bendada, A localized radial basis function meshless method for modeling the nondestructive testing of complex shape objects using infrared thermography, Internal report, Computer Vision and Systems Laboratory, Laval University. 6 S. M. Shepard, J.R. Lhota, B. A. Rubadeux, D. Wang and T. Ahmed, Reconstruction and enhancement of active thermographic image sequences Optical Engineering , J. G. Sun, Analysis of pulsed thermography methods for defect depth prediction Journal of Heat Transfer , Z. Zhang, A flexible new technique for camera calibration, IEEE Trans. Anal. Mach. Intell. Vol 22, pp ,
A Defect Detection Approach in Thermal Images
 More Info at Open Access Database www.ndt.net/?id=17715 A Defect Detection Approach in Thermal Images Abstract by P. Hedayati Vahid, S. Hesabi, D. Lauredndeau, and X. Maldaque * * Département de génie
More Info at Open Access Database www.ndt.net/?id=17715 A Defect Detection Approach in Thermal Images Abstract by P. Hedayati Vahid, S. Hesabi, D. Lauredndeau, and X. Maldaque * * Département de génie
Mapping Non-Destructive Testing Data on the 3D Geometry of Objects with Complex Shapes
 More Info at Open Access Database www.ndt.net/?id=17670 Mapping Non-Destructive Testing Data on the 3D Geometry of Objects with Complex Shapes Abstract by S. Soldan*, D. Ouellet**, P.Hedayati**, A. Bendada**,
More Info at Open Access Database www.ndt.net/?id=17670 Mapping Non-Destructive Testing Data on the 3D Geometry of Objects with Complex Shapes Abstract by S. Soldan*, D. Ouellet**, P.Hedayati**, A. Bendada**,
Validation of Heat Conduction 2D Analytical Model in Spherical Geometries using infrared Thermography.*
 11 th International Conference on Quantitative InfraRed Thermography Validation of Heat Conduction 2D Analytical Model in Spherical Geometries using infrared Thermography.* by C. San Martín 1,2, C. Torres
11 th International Conference on Quantitative InfraRed Thermography Validation of Heat Conduction 2D Analytical Model in Spherical Geometries using infrared Thermography.* by C. San Martín 1,2, C. Torres
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
THERMOGRAPHIC IMAGING OF DEFECTS IN ANISOTROPIC COMPOSITES
 THERMOGRAPHIC IMAGING OF DEFECTS IN ANISOTROPIC COMPOSITES Y.A. Plotnikov and W.P. Winfree M.S. 231 NASA Langley Research Center Hampton, VA 23681-000 1 INTRODUCTION Composite materials are of increasing
THERMOGRAPHIC IMAGING OF DEFECTS IN ANISOTROPIC COMPOSITES Y.A. Plotnikov and W.P. Winfree M.S. 231 NASA Langley Research Center Hampton, VA 23681-000 1 INTRODUCTION Composite materials are of increasing
M I V I M Multipolar Infrared Vision
 Automatic IRNDT Inspection Applying Sparse PCA-based Clustering Bardia Yousefi Hossein Memarzadeh Sharifipour* Clemente Ibarra-Castanedo Xavier P. V. Maldague Canada Research Chair in Multipolar Infrared
Automatic IRNDT Inspection Applying Sparse PCA-based Clustering Bardia Yousefi Hossein Memarzadeh Sharifipour* Clemente Ibarra-Castanedo Xavier P. V. Maldague Canada Research Chair in Multipolar Infrared
An Overview of Matchmoving using Structure from Motion Methods
 An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
Shape and uneven heating correction for NOT on cylinders by thermal methods
 Shape and uneven heating correction for NOT on cylinders by thermal methods by J.F. Pelletier 1, E. Grinzato 2, R. Dess1 2, X. Maldague 1 'Universite Laval. Cite Universitaire, Quebec, Canada. GIK 7P4
Shape and uneven heating correction for NOT on cylinders by thermal methods by J.F. Pelletier 1, E. Grinzato 2, R. Dess1 2, X. Maldague 1 'Universite Laval. Cite Universitaire, Quebec, Canada. GIK 7P4
A 3-D Scanner Capturing Range and Color for the Robotics Applications
 J.Haverinen & J.Röning, A 3-D Scanner Capturing Range and Color for the Robotics Applications, 24th Workshop of the AAPR - Applications of 3D-Imaging and Graph-based Modeling, May 25-26, Villach, Carinthia,
J.Haverinen & J.Röning, A 3-D Scanner Capturing Range and Color for the Robotics Applications, 24th Workshop of the AAPR - Applications of 3D-Imaging and Graph-based Modeling, May 25-26, Villach, Carinthia,
Statistical analysis of IR thermographic sequences by PCA
 Infrared Physics & Technology 46 (2004) 85 91 www.elsevier.com/locate/infrared Statistical analysis of IR thermographic sequences by PCA S. Marinetti a, *, E. Grinzato a, P.G. Bison a, E. Bozzi b, M. Chimenti
Infrared Physics & Technology 46 (2004) 85 91 www.elsevier.com/locate/infrared Statistical analysis of IR thermographic sequences by PCA S. Marinetti a, *, E. Grinzato a, P.G. Bison a, E. Bozzi b, M. Chimenti
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES
 FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
Ultrasonic Multi-Skip Tomography for Pipe Inspection
 18 th World Conference on Non destructive Testing, 16-2 April 212, Durban, South Africa Ultrasonic Multi-Skip Tomography for Pipe Inspection Arno VOLKER 1, Rik VOS 1 Alan HUNTER 1 1 TNO, Stieltjesweg 1,
18 th World Conference on Non destructive Testing, 16-2 April 212, Durban, South Africa Ultrasonic Multi-Skip Tomography for Pipe Inspection Arno VOLKER 1, Rik VOS 1 Alan HUNTER 1 1 TNO, Stieltjesweg 1,
And. Modal Analysis. Using. VIC-3D-HS, High Speed 3D Digital Image Correlation System. Indian Institute of Technology New Delhi
 Full Field Displacement And Strain Measurement And Modal Analysis Using VIC-3D-HS, High Speed 3D Digital Image Correlation System At Indian Institute of Technology New Delhi VIC-3D, 3D Digital Image Correlation
Full Field Displacement And Strain Measurement And Modal Analysis Using VIC-3D-HS, High Speed 3D Digital Image Correlation System At Indian Institute of Technology New Delhi VIC-3D, 3D Digital Image Correlation
Thermal experimental investigation of radiative heat transfer for the validation of radiation models
 Computational Methods and Experimental Measurements XII 251 Thermal experimental investigation of radiative heat transfer for the validation of radiation models N. P. Lavery, M. R. Vujičić & S. G. R. Brown
Computational Methods and Experimental Measurements XII 251 Thermal experimental investigation of radiative heat transfer for the validation of radiation models N. P. Lavery, M. R. Vujičić & S. G. R. Brown
IMPROVEMENT OF AIRCRAFT MECHANICAL DAMAGE INSPECTION WITH ADVANCED 3D IMAGING TECHNOLOGIES
 IMPROVEMENT OF AIRCRAFT MECHANICAL DAMAGE INSPECTION WITH ADVANCED 3D IMAGING TECHNOLOGIES MARK MAIZONNASSE 60TH A4A NDT FORUM SEPTEMBER 2017, FORT LAUDERDALE, FL, USA BRIDGING PHYSICAL AND DIGITAL WORLDS
IMPROVEMENT OF AIRCRAFT MECHANICAL DAMAGE INSPECTION WITH ADVANCED 3D IMAGING TECHNOLOGIES MARK MAIZONNASSE 60TH A4A NDT FORUM SEPTEMBER 2017, FORT LAUDERDALE, FL, USA BRIDGING PHYSICAL AND DIGITAL WORLDS
An explicit feature control approach in structural topology optimization
 th World Congress on Structural and Multidisciplinary Optimisation 07 th -2 th, June 205, Sydney Australia An explicit feature control approach in structural topology optimization Weisheng Zhang, Xu Guo
th World Congress on Structural and Multidisciplinary Optimisation 07 th -2 th, June 205, Sydney Australia An explicit feature control approach in structural topology optimization Weisheng Zhang, Xu Guo
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Infrared Camera Calibration in the 3D Temperature Field Reconstruction
 , pp.27-34 http://dx.doi.org/10.14257/ijmue.2016.11.6.03 Infrared Camera Calibration in the 3D Temperature Field Reconstruction Sun Xiaoming, Wu Haibin, Wang Wei, Liubo and Cui Guoguang The higher Educational
, pp.27-34 http://dx.doi.org/10.14257/ijmue.2016.11.6.03 Infrared Camera Calibration in the 3D Temperature Field Reconstruction Sun Xiaoming, Wu Haibin, Wang Wei, Liubo and Cui Guoguang The higher Educational
A Transmission Line Matrix Model for Shielding Effects in Stents
 A Transmission Line Matrix Model for hielding Effects in tents Razvan Ciocan (1), Nathan Ida (2) (1) Clemson University Physics and Astronomy Department Clemson University, C 29634-0978 ciocan@clemon.edu
A Transmission Line Matrix Model for hielding Effects in tents Razvan Ciocan (1), Nathan Ida (2) (1) Clemson University Physics and Astronomy Department Clemson University, C 29634-0978 ciocan@clemon.edu
Pattern Feature Detection for Camera Calibration Using Circular Sample
 Pattern Feature Detection for Camera Calibration Using Circular Sample Dong-Won Shin and Yo-Sung Ho (&) Gwangju Institute of Science and Technology (GIST), 13 Cheomdan-gwagiro, Buk-gu, Gwangju 500-71,
Pattern Feature Detection for Camera Calibration Using Circular Sample Dong-Won Shin and Yo-Sung Ho (&) Gwangju Institute of Science and Technology (GIST), 13 Cheomdan-gwagiro, Buk-gu, Gwangju 500-71,
Planar pattern for automatic camera calibration
 Planar pattern for automatic camera calibration Beiwei Zhang Y. F. Li City University of Hong Kong Department of Manufacturing Engineering and Engineering Management Kowloon, Hong Kong Fu-Chao Wu Institute
Planar pattern for automatic camera calibration Beiwei Zhang Y. F. Li City University of Hong Kong Department of Manufacturing Engineering and Engineering Management Kowloon, Hong Kong Fu-Chao Wu Institute
Application of a 3D Laser Inspection Method for Surface Corrosion on a Spherical Pressure Vessel
 More Info at Open Access Database www.ndt.net/?id=15076 Application of a 3D Laser Inspection Method for Surface Corrosion on a Spherical Pressure Vessel Jean-Simon Fraser, Pierre-Hugues Allard, Patrice
More Info at Open Access Database www.ndt.net/?id=15076 Application of a 3D Laser Inspection Method for Surface Corrosion on a Spherical Pressure Vessel Jean-Simon Fraser, Pierre-Hugues Allard, Patrice
Impact of 3D Laser Data Resolution and Accuracy on Pipeline Dents Strain Analysis
 More Info at Open Access Database www.ndt.net/?id=15137 Impact of 3D Laser Data Resolution and Accuracy on Pipeline Dents Strain Analysis Jean-Simon Fraser, Pierre-Hugues Allard Creaform, 5825 rue St-Georges,
More Info at Open Access Database www.ndt.net/?id=15137 Impact of 3D Laser Data Resolution and Accuracy on Pipeline Dents Strain Analysis Jean-Simon Fraser, Pierre-Hugues Allard Creaform, 5825 rue St-Georges,
Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera
 Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera Michael P. Cutter University of California at Santa Cruz Baskin School of Engineering (Computer Engineering department) Santa Cruz,
Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera Michael P. Cutter University of California at Santa Cruz Baskin School of Engineering (Computer Engineering department) Santa Cruz,
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Ultrasonic imaging of steel-adhesive and aluminum-adhesive joints using two dimensional array
 14th Int. Symposium on Nondestructive Characterization of Materials (NDCM 2015) June 2226, 2015, Marina Del Rey, CA, USA More Info at Open Access Database www.ndt.net/?id=18133 Ultrasonic imaging of steel-adhesive
14th Int. Symposium on Nondestructive Characterization of Materials (NDCM 2015) June 2226, 2015, Marina Del Rey, CA, USA More Info at Open Access Database www.ndt.net/?id=18133 Ultrasonic imaging of steel-adhesive
Tomographic Algorithm for Industrial Plasmas
 Tomographic Algorithm for Industrial Plasmas More info about this article: http://www.ndt.net/?id=22342 1 Sudhir K. Chaudhary, 1 Kavita Rathore, 2 Sudeep Bhattacharjee, 1 Prabhat Munshi 1 Nuclear Engineering
Tomographic Algorithm for Industrial Plasmas More info about this article: http://www.ndt.net/?id=22342 1 Sudhir K. Chaudhary, 1 Kavita Rathore, 2 Sudeep Bhattacharjee, 1 Prabhat Munshi 1 Nuclear Engineering
ScienceDirect. The use of Optical Methods for Leak Testing Dampers
 Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 69 ( 2014 ) 788 794 24th DAAAM International Symposium on Intelligent Manufacturing and Automation, 2013 The use of Optical
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 69 ( 2014 ) 788 794 24th DAAAM International Symposium on Intelligent Manufacturing and Automation, 2013 The use of Optical
3D Models from Range Sensors. Gianpaolo Palma
 3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
3D Models from Range Sensors Gianpaolo Palma Who Gianpaolo Palma Researcher at Visual Computing Laboratory (ISTI-CNR) Expertise: 3D scanning, Mesh Processing, Computer Graphics E-mail: gianpaolo.palma@isti.cnr.it
ADVANCED IMAGE PROCESSING METHODS FOR ULTRASONIC NDE RESEARCH C. H. Chen, University of Massachusetts Dartmouth, N.
 ADVANCED IMAGE PROCESSING METHODS FOR ULTRASONIC NDE RESEARCH C. H. Chen, University of Massachusetts Dartmouth, N. Dartmouth, MA USA Abstract: The significant progress in ultrasonic NDE systems has now
ADVANCED IMAGE PROCESSING METHODS FOR ULTRASONIC NDE RESEARCH C. H. Chen, University of Massachusetts Dartmouth, N. Dartmouth, MA USA Abstract: The significant progress in ultrasonic NDE systems has now
Projector Calibration for Pattern Projection Systems
 Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
Dedicated Software Algorithms for 3D Clouds of Points
 Dedicated Software Algorithms for 3D Clouds of Points Introduction AQSENSE develops and commercializes 3D image acquisition and processing technologies that allow high speed in-line 100% production inspection,
Dedicated Software Algorithms for 3D Clouds of Points Introduction AQSENSE develops and commercializes 3D image acquisition and processing technologies that allow high speed in-line 100% production inspection,
A three-step system calibration procedure with error compensation for 3D shape measurement
 January 10, 2010 / Vol. 8, No. 1 / CHINESE OPTICS LETTERS 33 A three-step system calibration procedure with error compensation for 3D shape measurement Haihua Cui ( ), Wenhe Liao ( ), Xiaosheng Cheng (
January 10, 2010 / Vol. 8, No. 1 / CHINESE OPTICS LETTERS 33 A three-step system calibration procedure with error compensation for 3D shape measurement Haihua Cui ( ), Wenhe Liao ( ), Xiaosheng Cheng (
3D Reconstruction of Thermal Images
 3D Reconstruction of Thermal Images L. Acampora SUN, Second University of Naples, Aversa, Italy F. De Filippis, A. Martucci, L. Sorgi CIRA, Italian Centre of Aerospace Research, Capua, Italy ABSTRACT Infrared
3D Reconstruction of Thermal Images L. Acampora SUN, Second University of Naples, Aversa, Italy F. De Filippis, A. Martucci, L. Sorgi CIRA, Italian Centre of Aerospace Research, Capua, Italy ABSTRACT Infrared
Precise laser-based optical 3D measurement of welding seams under water
 Precise laser-based optical 3D measurement of welding seams under water ISPRS/CIPA Workshop Underwater 3D Recording & Modeling" Piano di Sorrento (Napoli), Italy 16. 17. April 2015 Tanja Ekkel (M.Sc.)
Precise laser-based optical 3D measurement of welding seams under water ISPRS/CIPA Workshop Underwater 3D Recording & Modeling" Piano di Sorrento (Napoli), Italy 16. 17. April 2015 Tanja Ekkel (M.Sc.)
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Integrated three-dimensional reconstruction using reflectance fields
 www.ijcsi.org 32 Integrated three-dimensional reconstruction using reflectance fields Maria-Luisa Rosas 1 and Miguel-Octavio Arias 2 1,2 Computer Science Department, National Institute of Astrophysics,
www.ijcsi.org 32 Integrated three-dimensional reconstruction using reflectance fields Maria-Luisa Rosas 1 and Miguel-Octavio Arias 2 1,2 Computer Science Department, National Institute of Astrophysics,
inter.noise 2000 The 29th International Congress and Exhibition on Noise Control Engineering August 2000, Nice, FRANCE
 Copyright SFA - InterNoise 2000 1 inter.noise 2000 The 29th International Congress and Exhibition on Noise Control Engineering 27-30 August 2000, Nice, FRANCE I-INCE Classification: 4.7 A HYBRID TOOL FOR
Copyright SFA - InterNoise 2000 1 inter.noise 2000 The 29th International Congress and Exhibition on Noise Control Engineering 27-30 August 2000, Nice, FRANCE I-INCE Classification: 4.7 A HYBRID TOOL FOR
Coke Drum Laser Profiling
 International Workshop on SMART MATERIALS, STRUCTURES NDT in Canada 2013Conference & NDT for the Energy Industry October 7-10, 2013 Calgary, Alberta, CANADA Coke Drum Laser Profiling Mike Bazzi 1, Gilbert
International Workshop on SMART MATERIALS, STRUCTURES NDT in Canada 2013Conference & NDT for the Energy Industry October 7-10, 2013 Calgary, Alberta, CANADA Coke Drum Laser Profiling Mike Bazzi 1, Gilbert
A MODELING METHOD OF CURING DEFORMATION FOR CFRP COMPOSITE STIFFENED PANEL WANG Yang 1, GAO Jubin 1 BO Ma 1 LIU Chuanjun 1
 21 st International Conference on Composite Materials Xi an, 20-25 th August 2017 A MODELING METHOD OF CURING DEFORMATION FOR CFRP COMPOSITE STIFFENED PANEL WANG Yang 1, GAO Jubin 1 BO Ma 1 LIU Chuanjun
21 st International Conference on Composite Materials Xi an, 20-25 th August 2017 A MODELING METHOD OF CURING DEFORMATION FOR CFRP COMPOSITE STIFFENED PANEL WANG Yang 1, GAO Jubin 1 BO Ma 1 LIU Chuanjun
Study on Gear Chamfering Method based on Vision Measurement
 International Conference on Informatization in Education, Management and Business (IEMB 2015) Study on Gear Chamfering Method based on Vision Measurement Jun Sun College of Civil Engineering and Architecture,
International Conference on Informatization in Education, Management and Business (IEMB 2015) Study on Gear Chamfering Method based on Vision Measurement Jun Sun College of Civil Engineering and Architecture,
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows
 ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
5LSH0 Advanced Topics Video & Analysis
 1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
3D DEFORMATION MEASUREMENT USING STEREO- CORRELATION APPLIED TO EXPERIMENTAL MECHANICS
 3D DEFORMATION MEASUREMENT USING STEREO- CORRELATION APPLIED TO EXPERIMENTAL MECHANICS Dorian Garcia, Jean-José Orteu École des Mines d Albi, F-81013 ALBI CT Cedex 09, France Dorian.Garcia@enstimac.fr,
3D DEFORMATION MEASUREMENT USING STEREO- CORRELATION APPLIED TO EXPERIMENTAL MECHANICS Dorian Garcia, Jean-José Orteu École des Mines d Albi, F-81013 ALBI CT Cedex 09, France Dorian.Garcia@enstimac.fr,
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Active Infrared Imaging For 3D Control of Multi-Layer Transparent Objects
 More Info at Open Access Database www.ndt.net/?id=17730 Abstract Active Infrared Imaging For 3D Control of Multi-Layer Transparent Objects by O.Aubreton*, A. Bajard*, B. Verney*. M. Belckacemi*, F. Truchetet*
More Info at Open Access Database www.ndt.net/?id=17730 Abstract Active Infrared Imaging For 3D Control of Multi-Layer Transparent Objects by O.Aubreton*, A. Bajard*, B. Verney*. M. Belckacemi*, F. Truchetet*
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
Digital Image Processing COSC 6380/4393 Lecture 4 Jan. 24 th, 2019 Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Digital Image Processing COSC 6380/4393 TA - Office: PGH 231 (Update) Shikha
Model-based segmentation and recognition from range data
 Model-based segmentation and recognition from range data Jan Boehm Institute for Photogrammetry Universität Stuttgart Germany Keywords: range image, segmentation, object recognition, CAD ABSTRACT This
Model-based segmentation and recognition from range data Jan Boehm Institute for Photogrammetry Universität Stuttgart Germany Keywords: range image, segmentation, object recognition, CAD ABSTRACT This
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
0. Introduction: What is Computer Graphics? 1. Basics of scan conversion (line drawing) 2. Representing 2D curves
 2. Representing 2D curves") CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~elf Instructor: Eugene Fiume Office: BA 5266 Phone: 416 978 5472 (not a reliable way) Email:
CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~elf Instructor: Eugene Fiume Office: BA 5266 Phone: 416 978 5472 (not a reliable way) Email:
Color and Range Sensing for Hypermedia and Interactivity in Museums
 Color and Range Sensing for Hypermedia and Interactivity in Museums R Baribeau and J.M. Taylor Analytical Research Services Canadian Conservation Institute Department of Communications Ottawa, Canada KIA
Color and Range Sensing for Hypermedia and Interactivity in Museums R Baribeau and J.M. Taylor Analytical Research Services Canadian Conservation Institute Department of Communications Ottawa, Canada KIA
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction
 Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Scanner Parameter Estimation Using Bilevel Scans of Star Charts
 ICDAR, Seattle WA September Scanner Parameter Estimation Using Bilevel Scans of Star Charts Elisa H. Barney Smith Electrical and Computer Engineering Department Boise State University, Boise, Idaho 8375
ICDAR, Seattle WA September Scanner Parameter Estimation Using Bilevel Scans of Star Charts Elisa H. Barney Smith Electrical and Computer Engineering Department Boise State University, Boise, Idaho 8375
Advanced Image Reconstruction Methods for Photoacoustic Tomography
 Advanced Image Reconstruction Methods for Photoacoustic Tomography Mark A. Anastasio, Kun Wang, and Robert Schoonover Department of Biomedical Engineering Washington University in St. Louis 1 Outline Photoacoustic/thermoacoustic
Advanced Image Reconstruction Methods for Photoacoustic Tomography Mark A. Anastasio, Kun Wang, and Robert Schoonover Department of Biomedical Engineering Washington University in St. Louis 1 Outline Photoacoustic/thermoacoustic
Epipolar Geometry in Stereo, Motion and Object Recognition
 Epipolar Geometry in Stereo, Motion and Object Recognition A Unified Approach by GangXu Department of Computer Science, Ritsumeikan University, Kusatsu, Japan and Zhengyou Zhang INRIA Sophia-Antipolis,
Epipolar Geometry in Stereo, Motion and Object Recognition A Unified Approach by GangXu Department of Computer Science, Ritsumeikan University, Kusatsu, Japan and Zhengyou Zhang INRIA Sophia-Antipolis,
Microbolometer matrix gain non-uniformity determination and correction with the aid of ring and spot infrared emitters
 th International Conference on Quantitative InfraRed Thermography Microbolometer matrix gain non-uniformity determination and correction with the aid of ring and spot infrared emitters *Institute of Electronics,
th International Conference on Quantitative InfraRed Thermography Microbolometer matrix gain non-uniformity determination and correction with the aid of ring and spot infrared emitters *Institute of Electronics,
Low Cost Motion Capture
 Low Cost Motion Capture R. Budiman M. Bennamoun D.Q. Huynh School of Computer Science and Software Engineering The University of Western Australia Crawley WA 6009 AUSTRALIA Email: budimr01@tartarus.uwa.edu.au,
Low Cost Motion Capture R. Budiman M. Bennamoun D.Q. Huynh School of Computer Science and Software Engineering The University of Western Australia Crawley WA 6009 AUSTRALIA Email: budimr01@tartarus.uwa.edu.au,
From thermal inspection to updating a numerical model of a race bicycle
 From thermal inspection to updating a numerical model of a race bicycle by G. Steenackers*, **, J. Peeters*, B. Ribbens*, J. Vanwalleghem***, S. Verwulgen + and E. Louarroudi* More info about this article:
From thermal inspection to updating a numerical model of a race bicycle by G. Steenackers*, **, J. Peeters*, B. Ribbens*, J. Vanwalleghem***, S. Verwulgen + and E. Louarroudi* More info about this article:
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
IMPROVEMENT OF BACKGROUND SUBTRACTION METHOD FOR REAL TIME MOVING OBJECT DETECTION INTRODUCTION
 IMPROVEMENT OF BACKGROUND SUBTRACTION METHOD FOR REAL TIME MOVING OBJECT DETECTION Sina Adham Khiabani and Yun Zhang University of New Brunswick, Department of Geodesy and Geomatics Fredericton, Canada
IMPROVEMENT OF BACKGROUND SUBTRACTION METHOD FOR REAL TIME MOVING OBJECT DETECTION Sina Adham Khiabani and Yun Zhang University of New Brunswick, Department of Geodesy and Geomatics Fredericton, Canada
 Set No. 1 IV B.Tech. I Semester Regular Examinations, November 2010 FINITE ELEMENT METHODS (Mechanical Engineering) Time: 3 Hours Max Marks: 80 Answer any FIVE Questions All Questions carry equal marks
Set No. 1 IV B.Tech. I Semester Regular Examinations, November 2010 FINITE ELEMENT METHODS (Mechanical Engineering) Time: 3 Hours Max Marks: 80 Answer any FIVE Questions All Questions carry equal marks
DEVELOPMENT OF PREVENTIVE MAINTENANCE SYSTEM ARISING IN ADVANCED EDDY CURRENT TESTING USING NETWORK TOMOGRAPHY
 DEVELOPMENT OF PREVENTIVE MAINTENANCE SYSTEM ARISING IN ADVANCED EDDY CURRENT TESTING USING NETWORK TOMOGRAPHY F. Kojima 1, F.Kobayashi 1, A. Nishimizu 2, M. Koike 2, T. Matsui 2, H. Endo 3, T. Uchimoto
DEVELOPMENT OF PREVENTIVE MAINTENANCE SYSTEM ARISING IN ADVANCED EDDY CURRENT TESTING USING NETWORK TOMOGRAPHY F. Kojima 1, F.Kobayashi 1, A. Nishimizu 2, M. Koike 2, T. Matsui 2, H. Endo 3, T. Uchimoto
Predicting the mechanical behaviour of large composite rocket motor cases
 High Performance Structures and Materials III 73 Predicting the mechanical behaviour of large composite rocket motor cases N. Couroneau DGA/CAEPE, St Médard en Jalles, France Abstract A method to develop
High Performance Structures and Materials III 73 Predicting the mechanical behaviour of large composite rocket motor cases N. Couroneau DGA/CAEPE, St Médard en Jalles, France Abstract A method to develop
ULTRAVISION 3.7R21. Product Bulletin. UltraVision, a complete UT and Phased Array inspection package!
 ULTRAVISION 3.7R21 Product Bulletin UltraVision, a complete UT and Phased Array inspection package! www.zetec.com Table of Content Table of Content... 2 Purpose of UltraVision 3.7R21... 3 Corrosion...
ULTRAVISION 3.7R21 Product Bulletin UltraVision, a complete UT and Phased Array inspection package! www.zetec.com Table of Content Table of Content... 2 Purpose of UltraVision 3.7R21... 3 Corrosion...
Non-Destructive Failure Analysis and Measurement for Molded Devices and Complex Assemblies with X-ray CT and 3D Image Processing Techniques
 SINCE2013 Singapore International NDT Conference & Exhibition 2013, 19-20 July 2013 Non-Destructive Failure Analysis and Measurement for Molded Devices and Complex Assemblies with X-ray CT and 3D Image
SINCE2013 Singapore International NDT Conference & Exhibition 2013, 19-20 July 2013 Non-Destructive Failure Analysis and Measurement for Molded Devices and Complex Assemblies with X-ray CT and 3D Image
Investigation on reconstruction methods applied to 3D terahertz computed Tomography
 Investigation on reconstruction methods applied to 3D terahertz computed Tomography B. Recur, 3 A. Younus, 1, P. Mounaix 1, S. Salort, 2 B. Chassagne, 2 P. Desbarats, 3 J-P. Caumes, 2 and E. Abraham 1
Investigation on reconstruction methods applied to 3D terahertz computed Tomography B. Recur, 3 A. Younus, 1, P. Mounaix 1, S. Salort, 2 B. Chassagne, 2 P. Desbarats, 3 J-P. Caumes, 2 and E. Abraham 1
ENGN D Photography / Spring 2018 / SYLLABUS
 ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
MATHEMATICAL ANALYSIS, MODELING AND OPTIMIZATION OF COMPLEX HEAT TRANSFER PROCESSES
 MATHEMATICAL ANALYSIS, MODELING AND OPTIMIZATION OF COMPLEX HEAT TRANSFER PROCESSES Goals of research Dr. Uldis Raitums, Dr. Kārlis Birģelis To develop and investigate mathematical properties of algorithms
MATHEMATICAL ANALYSIS, MODELING AND OPTIMIZATION OF COMPLEX HEAT TRANSFER PROCESSES Goals of research Dr. Uldis Raitums, Dr. Kārlis Birģelis To develop and investigate mathematical properties of algorithms
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
MULTIPLE-SENSOR INTEGRATION FOR EFFICIENT REVERSE ENGINEERING OF GEOMETRY
 Proceedings of the 11 th International Conference on Manufacturing Research (ICMR2013) MULTIPLE-SENSOR INTEGRATION FOR EFFICIENT REVERSE ENGINEERING OF GEOMETRY Feng Li, Andrew Longstaff, Simon Fletcher,
Proceedings of the 11 th International Conference on Manufacturing Research (ICMR2013) MULTIPLE-SENSOR INTEGRATION FOR EFFICIENT REVERSE ENGINEERING OF GEOMETRY Feng Li, Andrew Longstaff, Simon Fletcher,
Surround Structured Lighting for Full Object Scanning
 Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
STEREO VISION AND LASER STRIPERS FOR THREE-DIMENSIONAL SURFACE MEASUREMENTS
 XVI CONGRESO INTERNACIONAL DE INGENIERÍA GRÁFICA STEREO VISION AND LASER STRIPERS FOR THREE-DIMENSIONAL SURFACE MEASUREMENTS BARONE, Sandro; BRUNO, Andrea University of Pisa Dipartimento di Ingegneria
XVI CONGRESO INTERNACIONAL DE INGENIERÍA GRÁFICA STEREO VISION AND LASER STRIPERS FOR THREE-DIMENSIONAL SURFACE MEASUREMENTS BARONE, Sandro; BRUNO, Andrea University of Pisa Dipartimento di Ingegneria
AUTOMATED CALIBRATION TECHNIQUE FOR PHOTOGRAMMETRIC SYSTEM BASED ON A MULTI-MEDIA PROJECTOR AND A CCD CAMERA
 AUTOMATED CALIBRATION TECHNIQUE FOR PHOTOGRAMMETRIC SYSTEM BASED ON A MULTI-MEDIA PROJECTOR AND A CCD CAMERA V. A. Knyaz * GosNIIAS, State Research Institute of Aviation System, 539 Moscow, Russia knyaz@gosniias.ru
AUTOMATED CALIBRATION TECHNIQUE FOR PHOTOGRAMMETRIC SYSTEM BASED ON A MULTI-MEDIA PROJECTOR AND A CCD CAMERA V. A. Knyaz * GosNIIAS, State Research Institute of Aviation System, 539 Moscow, Russia knyaz@gosniias.ru
LASer Cavity Analysis and Design
 The unique combination of simulation tools for LASer Cavity Analysis and Design During the last 15 years LASCAD has become industry-leading so ware for LASer Cavity Analysis and Design. The feedback from
The unique combination of simulation tools for LASer Cavity Analysis and Design During the last 15 years LASCAD has become industry-leading so ware for LASer Cavity Analysis and Design. The feedback from
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Novel evaluation method of low contrast resolution performance of dimensional X-ray CT
 More Info at Open Access Database www.ndt.net/?id=18754 Novel evaluation method of low contrast resolution performance of dimensional X-ray CT Makoto Abe 1, Hiroyuki Fujimoto 1, Osamu Sato 1, Kazuya Matsuzaki
More Info at Open Access Database www.ndt.net/?id=18754 Novel evaluation method of low contrast resolution performance of dimensional X-ray CT Makoto Abe 1, Hiroyuki Fujimoto 1, Osamu Sato 1, Kazuya Matsuzaki
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras
 Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
3D FACE RECONSTRUCTION BASED ON EPIPOLAR GEOMETRY
 IJDW Volume 4 Number January-June 202 pp. 45-50 3D FACE RECONSRUCION BASED ON EPIPOLAR GEOMERY aher Khadhraoui, Faouzi Benzarti 2 and Hamid Amiri 3,2,3 Signal, Image Processing and Patterns Recognition
IJDW Volume 4 Number January-June 202 pp. 45-50 3D FACE RECONSRUCION BASED ON EPIPOLAR GEOMERY aher Khadhraoui, Faouzi Benzarti 2 and Hamid Amiri 3,2,3 Signal, Image Processing and Patterns Recognition
Saurabh GUPTA and Prabhu RAJAGOPAL *
 8 th International Symposium on NDT in Aerospace, November 3-5, 2016 More info about this article: http://www.ndt.net/?id=20609 Interaction of Fundamental Symmetric Lamb Mode with Delaminations in Composite
8 th International Symposium on NDT in Aerospace, November 3-5, 2016 More info about this article: http://www.ndt.net/?id=20609 Interaction of Fundamental Symmetric Lamb Mode with Delaminations in Composite
CALIBRATION BETWEEN DEPTH AND COLOR SENSORS FOR COMMODITY DEPTH CAMERAS. Cha Zhang and Zhengyou Zhang
 CALIBRATION BETWEEN DEPTH AND COLOR SENSORS FOR COMMODITY DEPTH CAMERAS Cha Zhang and Zhengyou Zhang Communication and Collaboration Systems Group, Microsoft Research {chazhang, zhang}@microsoft.com ABSTRACT
CALIBRATION BETWEEN DEPTH AND COLOR SENSORS FOR COMMODITY DEPTH CAMERAS Cha Zhang and Zhengyou Zhang Communication and Collaboration Systems Group, Microsoft Research {chazhang, zhang}@microsoft.com ABSTRACT
SIMULATION OF A TIRE INSPECTION SYSTEM
 SIMULATION OF A TIRE INSPECTION SYSTEM W. H. GRAY 1, C. DUMONT 1,2, and M. A. ABIDI 1 1 IRIS Laboratory, University of Tennessee, Knoxville, TN, 37996 U.S.A. 2 Le2I laboratory, IUT Le Creusot, University
SIMULATION OF A TIRE INSPECTION SYSTEM W. H. GRAY 1, C. DUMONT 1,2, and M. A. ABIDI 1 1 IRIS Laboratory, University of Tennessee, Knoxville, TN, 37996 U.S.A. 2 Le2I laboratory, IUT Le Creusot, University
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Comparison of Experimental and Model Based POD in a Simplified Eddy Current Procedure
 18th World Conference on Nondestructive Testing, 16-2 April 212, Durban, South Africa Comparison of Experimental and Model Based POD in a Simplified Eddy Current Procedure Anders ROSELL 1, Gert PERSSON
18th World Conference on Nondestructive Testing, 16-2 April 212, Durban, South Africa Comparison of Experimental and Model Based POD in a Simplified Eddy Current Procedure Anders ROSELL 1, Gert PERSSON
THE USE OF OPTICAL METHODS FOR LEAK TESTING DAMPERS
 DAAAM INTERNATIONAL SCIENTIFIC BOOK 2013 pp. 787-794 CHAPTER 47 THE USE OF OPTICAL METHODS FOR LEAK TESTING DAMPERS TOMASIAK, J. Abstract: The present paper presents the possible use of a portable structural
DAAAM INTERNATIONAL SCIENTIFIC BOOK 2013 pp. 787-794 CHAPTER 47 THE USE OF OPTICAL METHODS FOR LEAK TESTING DAMPERS TOMASIAK, J. Abstract: The present paper presents the possible use of a portable structural
Lecture 14: Basic Multi-View Geometry
 Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Model Based Perspective Inversion
 Model Based Perspective Inversion A. D. Worrall, K. D. Baker & G. D. Sullivan Intelligent Systems Group, Department of Computer Science, University of Reading, RG6 2AX, UK. Anthony.Worrall@reading.ac.uk
Model Based Perspective Inversion A. D. Worrall, K. D. Baker & G. D. Sullivan Intelligent Systems Group, Department of Computer Science, University of Reading, RG6 2AX, UK. Anthony.Worrall@reading.ac.uk
Computer Vision: Lecture 3
 Computer Vision: Lecture 3 Carl Olsson 2019-01-29 Carl Olsson Computer Vision: Lecture 3 2019-01-29 1 / 28 Todays Lecture Camera Calibration The inner parameters - K. Projective vs. Euclidean Reconstruction.
Computer Vision: Lecture 3 Carl Olsson 2019-01-29 Carl Olsson Computer Vision: Lecture 3 2019-01-29 1 / 28 Todays Lecture Camera Calibration The inner parameters - K. Projective vs. Euclidean Reconstruction.
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Abstract. Die Geometry. Introduction. Mesh Partitioning Technique for Coextrusion Simulation
 OPTIMIZATION OF A PROFILE COEXTRUSION DIE USING A THREE-DIMENSIONAL FLOW SIMULATION SOFTWARE Kim Ryckebosh 1 and Mahesh Gupta 2, 3 1. Deceuninck nv, BE-8830 Hooglede-Gits, Belgium 2. Michigan Technological
OPTIMIZATION OF A PROFILE COEXTRUSION DIE USING A THREE-DIMENSIONAL FLOW SIMULATION SOFTWARE Kim Ryckebosh 1 and Mahesh Gupta 2, 3 1. Deceuninck nv, BE-8830 Hooglede-Gits, Belgium 2. Michigan Technological
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Numerical and Experimental Modeling of a T-joint Fillet Welding Process
 11 th International onference on Quantitative InfraRed Thermography Numerical and Experimental Modeling of a T-joint Fillet Welding Process by Z. Tonković*, M. Perić**, M. Surjak*, I. Garašić*, I. oras*,.
11 th International onference on Quantitative InfraRed Thermography Numerical and Experimental Modeling of a T-joint Fillet Welding Process by Z. Tonković*, M. Perić**, M. Surjak*, I. Garašić*, I. oras*,.
Two-View Geometry (Course 23, Lecture D)
") Two-View Geometry (Course 23, Lecture D) Jana Kosecka Department of Computer Science George Mason University http://www.cs.gmu.edu/~kosecka General Formulation Given two views of the scene recover the
Two-View Geometry (Course 23, Lecture D) Jana Kosecka Department of Computer Science George Mason University http://www.cs.gmu.edu/~kosecka General Formulation Given two views of the scene recover the
Ray tracing based fast refraction method for an object seen through a cylindrical glass
 20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Ray tracing based fast refraction method for an object seen through a cylindrical
20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Ray tracing based fast refraction method for an object seen through a cylindrical
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize