FINITE ELEMENT MODEL UPDATING OF AN EXPERIMENTAL VEHICLE MODEL USING MEASURED MODAL CHARACTERISTICS
|
|
|
- Linda Morris
- 6 years ago
- Views:
Transcription
1 COMPDYN 009 ECCOMAS Thematic Confeence on Computational Methods in Stuctual Dynamics and Eathquake Engineeing M. Papadakakis, N.D. Lagaos, M. Fagiadakis (eds.) Rhodes, Geece, 4 June 009 FINITE ELEMENT MODEL UPDATING OF AN EXPERIMENTAL VEHICLE MODEL USING MEASURED MODAL CHARACTERISTICS Dimitios Giagopoulos, Evangelos Ntotsios, Costas Papadimitiou, Sotiios Natsiavas Aistotle Univesity of Thessaloniki Depatment of Mechanical Engineeing, Thessaloniki 544, Geece dgiag@auth.g, natsiava@auth.g Univesity of Thessaly Depatment of Mechanical Engineeing, Volos 38334, Geece entotsio@uth.g, costasp@uth.g Keywods: Modal Identification, Model Updating, Stuctual Identification, Multi-Objective Optimization, Stuctual Dynamics. Abstact. Methods fo modal identification and stuctual model updating ae employed to develop high fidelity finite element models of an expeimental vehicle model using acceleation measuements. The identification of modal chaacteistics of the vehicle is based on acceleation time histoies obtained fom impulse hamme tests. An available modal identification softwae is used to obtain the modal chaacteistics fom the analysis of the vaious sets of vibation measuements. A high modal density modal model is obtained. The modal chaacteistics ae then used to update an inceasingly complex set of finite element models of the vehicle. A multi-objective stuctual identification method is used fo estimating the paametes of the finite element stuctual models based on minimizing the modal esiduals. The method esults in multiple Paeto optimal stuctual models that ae consistent with the measued modal data and the modal esiduals used to measue the discepancies between the measued modal values and the modal values pedicted by the model. Single objective stuctual identification methods ae also evaluated as special cases of the poposed multiobjective identification method. The multi-objective famewok and the coesponding computational tools povide the whole spectum of optimal models and can thus be viewed as a genealization of the available conventional methods. The esults indicate that thee is wide vaiety of Paeto optimal stuctual models that tade off the fit in vaious measued quantities. These Paeto optimal models ae due to uncetainties aising fom model and measuement eos. The size of the obseved vaiations depends on the infomation contained in the measued data, as well as the size of model and measuement eos. The effectiveness of the updated models and the pedictive capabilities of the Paeto vehicle models ae assessed.
2 INTRODUCTION Stuctual model updating methods have been poposed in the past to econcile mathematical models, usually discetized finite element models, with expeimental data. The estimate of the optimal model fom a paameteized class of models is sensitive to uncetainties that ae due to limitations of the mathematical models used to epesent the behavio of the eal stuctue, the pesence of measuement and pocessing eo in the data, the numbe and type of measued modal o esponse time histoy data used in the econciling pocess, as well as the noms used to measue the fit between measued and model pedicted chaacteistics. The optimal stuctual models esulting fom such methods can be used fo impoving the model esponse and eliability pedictions [], stuctual health monitoing applications [-7] and stuctual contol [8]. Stuctual model paamete estimation poblems based on measued data, such as modal chaacteistics (e.g. [-6]) o esponse time histoy chaacteistics [9-0], ae often fomulated as weighted least-squaes poblems in which metics, measuing the esiduals between measued and model pedicted chaacteistics, ae build up into a single weighted esiduals metic fomed as a weighted aveage of the multiple individual metics using weighting factos. Standad optimization techniques ae then used to find the optimal values of the stuctual paametes that minimize the single weighted esiduals metic epesenting an oveall measue of fit between measued and model pedicted chaacteistics. Due to model eo and measuement noise, the esults of the optimization ae affected by the values assumed fo the weighting factos. The model updating poblem has also been fomulated in a multi-objective context [] that allows the simultaneous minimization of the multiple metics, eliminating the need fo using abitay weighting factos fo weighting the elative impotance of each metic in the oveall measue of fit. The multi-objective paamete estimation methodology povides multiple Paeto optimal stuctual models consistent with the data and the esiduals used in the sense that the fit each Paeto optimal model povides in a goup of measued modal popeties cannot be impoved without deteioating the fit in at least one othe modal goup. Theoetical and computational issues aising in multi-objective identification have been addessed and the coespondence between the multi-objective identification and the weighted esiduals identification has been established [-3]. Emphasis was given in addessing issues associated with solving the esulting multi-objective and single-objective optimization poblems. Fo this, efficient methods wee also poposed fo estimating the gadients and the Hessians [4] of the objective functions using the Nelson s method [5] fo finding the sensitivities of the eigenpopeties to model paametes. In this wok, the stuctual model updating poblem using modal esiduals is fomulated as single- and multi-objective optimization poblems with the objective fomed as a weighted aveage of the multiple objectives using weighting factos. Theoetical and computational issues ae then eviewed and the model updating methodologies ae applied to updating the finite element models of an expeimental vehicle model using acceleation measuements. Emphasis is given in investigating the vaiability of the Paeto optimal models and the vaiability of the esponse pedictions fom these Paeto optimal models. MODEL UPDATING BASED ON MODAL RESIDUALS ( k) ( ) 0 Let { ˆ, ˆ k N D= ω φ R, =,, m, k =,, N D} be the measued modal data fom a ( ) stuctue, consisting of modal fequencies ˆ k ( ) ω and modeshape components φ ˆ k at N 0 measued degees of feedom (DOF), whee m is the numbe of obseved modes and N D is the
3 numbe of modal data sets available. Conside a paameteized class of linea stuctual models used to model the dynamic behavio of the stuctue and let θ R θ be the set of fee N stuctual model paametes to be identified using the measued modal data. The objective in a modal-based stuctual identification methodology is to estimate the values of the paamete N set θ so that the modal data { ω ( ), ( ) d θ φ θ R, =,, m }, whee N d is the numbe of model DOF, pedicted by the linea class of models best matches, in some sense, the expeimentally obtained modal data in D. Fo this, let ( ) ( ) ˆ ( ) ˆ β θ Lφ θ φ φ ωˆ φˆ ω θ ω ε ( θ) = and ε ( θ) = ω =,, m, be the measues of fit o esiduals between the measued modal data and the model pedicted modal data fo the -th modal fequency and modeshape components, espectively, whee z = z z is the usual Euclidean nom, and ( ) ˆT β θ = φ Lφ( θ) / Lφ ( θ) T is a nomalization constant that guaanties that the measued modeshape φ ˆ at the measued DOFs is closest to the model modeshape β ( θ) Lφ ( θ ) pedicted by the paticula value of θ. N0 Nd The matix L R is an obsevation matix compised of zeos and ones that maps the Nd model DOFs to the N0 obseved DOFs. In ode to poceed with the model updating fomulation, the measued modal popeties ae gouped into two goups [3]. The fist goup contains the modal fequencies while the second goup contains the modeshape components fo all modes. Fo each goup, a nom is intoduced to measue the esiduals of the diffeence between the measued values of the modal popeties involved in the goup and the coesponding modal values pedicted fom the model class fo a paticula value of the paamete set θ. Fo the fist goup the measue of fit J ( ) θ is selected to epesent the diffeence between the measued and the model pedicted fequencies fo all modes. Fo the second goup the measue of fit J ( ) θ is selected to epesents the diffeence between the measued and the model pedicted modeshape components fo all modes. Specifically, the two measues of fit ae given by m m ω J = = () J ( θ) ε ( θ) and ( θ) = ε ( θ) () = The afoementioned gouping scheme is used in the next subsections fo demonstating the featues of the poposed model updating methodologies.. Multi-objective identification The poblem of identifying the model paamete values θ that minimize the modal o esponse time histoy esiduals can be fomulated as a multi-objective optimization poblem stated as follows [5]. Find the values of the stuctual paamete set θ that simultaneously minimizes the objectives y= J( θ) = ( J ( θ), J ( θ )) (3) subject to paamete constains θ low θ θ uppe, whee θ = ( θ,, θ Nθ ) Θ is the paamete vecto, is the paamete space, y= ( y,, y ) Y is the objective vecto, Y is the objec- Θ n φ 3
4 tive space and θ low and θ uppe ae espectively the lowe and uppe bounds of the paamete vecto. Fo conflicting objectives J ( θ ) and J ( ) θ thee is no single optimal solution, but athe a set of altenative solutions, known as Paeto optimal solutions, that ae optimal in the sense that no othe solutions in the paamete space ae supeio to them when both objectives ae consideed. The set of objective vectos y = J ( θ) coesponding to the set of Paeto optimal solutions θ is called Paeto optimal font. The chaacteistics of the Paeto solutions ae that the esiduals cannot be impoved in one goup without deteioating the esiduals in the othe goup. The multiple Paeto optimal solutions ae due to modelling and measuement eos. The level of modelling and measuement eos affect the size and the distance fom the oigin of the Paeto font in the objective space, as well as the vaiability of the Paeto optimal solutions in the paamete space. The vaiability of the Paeto optimal solutions also depends on the oveall sensitivity of the objective functions o, equivalently, the sensitivity of the modal popeties, to model paamete values θ. Such vaiabilities wee demonstated fo the case of two-dimensional objective space and one-dimensional paamete space in the wok by Chistodoulou and Papadimitiou [].. Weighted modal esiduals identification The paamete estimation poblem is taditionally solved by minimizing the single objective J( θ; w) = wj ( θ) + w J ( θ ) (4) fomed fom the multiple objectives Ji ( θ ) using the weighting factos wi 0, i =,, with w+ w =. The objective function J( θ ; w) epesents an oveall measue of fit between the measued and the model pedicted chaacteistics. The elative impotance of the esidual eos in the selection of the optimal model is eflected in the choice of the weights. The esults of the identification depend on the weight values used. Conventional weighted least squaes methods assume equal weight values, w = w =. This conventional method is efeed heein as the equally weighted modal esiduals method. The single objective is computationally attactive since conventional minimization algoithms can be applied to solve the poblem. Howeve, a sevee dawback of geneating Paeto optimal solutions by solving the seies of weighted single-objective optimization poblems by unifomly vaying the values of the weights is that this pocedue often esults in cluste of points in pats of the Paeto font that fail to povide an adequate epesentation of the entie Paeto shape. Thus, altenative algoithms dealing diectly with the multi-objective optimization poblem and geneating unifomly spead points along the entie Paeto font should be pefeed. Fomulating the paamete identification poblem as a multi-objective minimization poblem, the need fo using abitay weighting factos fo weighting the elative impotance of the esiduals Ji ( θ ) of a modal goup to an oveall weighted esiduals metic is eliminated. An advantage of the multi-objective identification methodology is that all admissible solutions in the paamete space ae obtained. Special algoithms ae available fo solving the multi-objective optimization poblem. Computational algoithms and elated issues fo solving the single-objective and the multi-objective optimization poblems ae biefly discussed in the next Section. 4
5 3 COMPUTATIONAL ISSUES IN MODEL UPDATING The poposed single and multi-objective identification poblems ae solved using available single- and multi-objective optimization algoithms. These algoithms ae biefly eviewed and vaious implementation issues ae addessed, including estimation of global optima fom multiple local/global ones, as well as convegence poblems. 3. Single-objective identification The optimization of J( θ ; w) in (4) with espect to θ fo given w can eadily be caied out numeically using any available algoithm fo optimizing a nonlinea function of seveal vaiables. These single objective optimization poblems may involve multiple local/global optima. Conventional gadient-based local optimization algoithms lack eliability in dealing with the estimation of multiple local/global optima obseved in stuctual identification poblems [,6], since convegence to the global optimum is not guaanteed. Evolution stategies (ES) [7] ae moe appopiate and effective to use in such cases. ES ae andom seach algoithms that exploe bette the paamete space fo detecting the neighbohood of the global optimum, avoiding pematue convegence to a local optimum. A disadvantage of ES is thei slow convegence at the neighbohood of an optimum since they do not exploit the gadient infomation. A hybid optimization algoithm should be used that exploits the advantages of ES and gadient-based methods. Specifically, an evolution stategy is used to exploe the paamete space and detect the neighbohood of the global optimum. Then the method switches to a gadient-based algoithm stating with the best estimate obtained fom the evolution stategy and using gadient infomation to acceleate convegence to the global optimum. 3. Multi-Objective Identification The set of Paeto optimal solutions can be obtained using available multi-objective optimization algoithms. Among them, the evolutionay algoithms, such as the stength Paeto evolutionay algoithm [8], ae well-suited to solve the multi-objective optimization poblem. The stength Paeto evolutionay algoithm, although it does not equie gadient infomation, it has the disadvantage of slow convegence fo objective vectos close to the Paeto font [5] and also it does not geneate an evenly spead Paeto font, especially fo lage diffeences in objective functions. Anothe vey efficient algoithm fo solving the multi-objective optimization poblem is the Nomal-Bounday Intesection (NBI) method [9]. It poduces an evenly spead of points along the Paeto font, even fo poblems fo which the elative scaling of the objectives ae vastly diffeent. The NBI optimization method involves the solution of constained nonlinea optimization poblems using available gadient-based constained optimization methods. The NBI uses the gadient infomation to acceleate convegence to the Paeto font. 3.3 Computations of gadients In ode to guaantee the convegence of the gadient-based optimization methods fo stuctual models involving a lage numbe of DOFs with seveal contibuting modes, the gadients of the objective functions with espect to the paamete set θ has to be estimated accuately. It has been obseved that numeical algoithms such as finite diffeence methods fo gadient evaluation does not guaantee convegence due to the fact that the eos in the numeical estimation may povide the wong diections in the seach space and convegence to the local/global minimum is not achieved, especially fo intemediate paamete values in the vicinity of a local/global optimum. Thus, the gadients of the objective functions should 5
6 be povided analytically. Moeove, gadient computations with espect to the paamete set using the finite diffeence method equies the solution of as many eigenvalue poblems as the numbe of paametes. The gadients of the modal fequencies and modeshapes, equied in the estimation of the gadient of J( θ ; w) in (4) o the gadients of the objectives Ji ( θ ) in (3) ae computed by expessing them exactly in tems of the modal fequencies, modeshapes and the gadients of the stuctual mass and stiffness matices with espect to θ using Nelson s method [5]. Special attention is given to the computation of the gadients and the Hessians of the objective functions fo the point of view of the eduction of the computational time equied. Analytical expessions fo the gadient of the modal fequencies and modeshapes ae used to ovecome the convegence poblems. In paticula, Nelson s method [5] is used fo computing analytically the fist deivatives of the eigenvalues and the eigenvectos. The advantage of the Nelson s method compaed to othe methods is that the gadient of the eigenvalue and the eigenvecto of one mode ae computed fom the eigenvalue and the eigenvecto of the same mode and thee is no need to know the eigenvalues and the eigenvectos fom othe modes. Fo each paamete in the set θ this computation is pefomed by solving a linea system of the same size as the oiginal system mass and stiffness matices. Nelson s method has also been extended to compute the second deivatives of the eigenvalues and the eigenvectos. The fomulation fo the gadient and the Hessian of the objective functions ae pesented in efeences [4, 0]. The computation of the gadients and the Hessian of the objective functions is shown to involve the solution of a single linea system, instead of N θ linea systems equied in usual computations of the gadient and N ( N + ) θ θ linea systems equied in the computation of the Hessian. This educes consideably the computational time, especially as the numbe of paametes in the set θ incease. 4 APPLICATION TO AN EXPERIMENTAL VEHICLE MODEL 4. Expeimental set up and modal identification Expeimental data fom a laboatoy small scale vehicle model, shown in Figue, ae used to demonstate the applicability of the poposed model updating methods and the pediction accuacy of the Paeto optimal models. The vehicle stuctue is housed at the Machine Dynamics Laboatoy of the Depatment of Mechanical Engineeing in Aistotle Univesity. Figue also shows an oveview of the expeimental set up. In paticula, the mechanical system tested consists of a fame substuctue (pats with ed, gay and black colo), simulating the fame of a vehicle. The main expeimental instuments used fo pefoming the expeimental measuements include the following: acceleometes Piezobeam 863C0, 8690C0, 8634B5 and K-beam 83A fom Kistle Instumente AG, load cell type 97Β50 fom Kistle Instumente AG, impulse foce hamme type 974Α5000 fom Kistle Instumente AG, analog to digital convete cads, PCI -455, PCI -455 Dynamic signal acquisition and PCI-655 E-seies fom National Instuments, data acquisition and signal pocessing softwae Labview 7.0. Moe details can be found in efeence []. Figue pesents details and the geometical dimensions of the fame subsystem alone. The fame substuctue is made of steel with Young s modulus E=. 0 N m, Poison s 6




7 Figue : Scaled vehicle model and expeimental set up. Figue : Dimensions of the fame substuctue. 7

8 3 atio ν = 0.3 and density ρ = 7850 kg m. Moeove, the measuement points ae indicated in Figue 3. Measuements ae collected fom 7 locations. Senso locations have been chosen in such a way so as to gathe as much infomation as possible about the stuctue s modal esponse. Figue 3: Measuement points on the fame substuctue. Using the available acceleation sensos, to measue the vibations induced by an applied impulse foce, the fequency esponse functions (FRF) of the measued DOFs ae estimated. These fequency esponse functions ae used to estimate the modal popeties using the Modal Identification Tool (MITool) [] developed by the System Dynamics Laboatoy in Univesity of Thessaly. The values of the modal fequencies, modal damping atios, modeshape components and modal paticipation factos wee estimated fom the softwae in the 0 to 70 Hz fequency bandwidth. Figue 4 compaes the measued FRFs with the FRFs pedicted by the identified optimal modal model fo a epesentative senso. As it is seen a high modal density modal model is obtained. Moeove, the fit of the measued FRF is vey good which validates the effectiveness of the modal identification softwae. 0 0 measued modal fit 0 0 FRF Fequency (Hz) Figue 4: Compaison between measued and optimal modal model pedicted FRF. 8
9 The identified values of the modal fequencies and the modal damping atios ae epoted in Table. Twenty modes wee clealy identified in the fequency ange 0 to 70 Hz with values of modal damping atios of the ode of 0.% to.3%. Mode Fequency Damping FEM (Hz) atio (%) (Hz) Table : Identified and nominal FE model pedicted modal fequencies and damping atios. 4. Updating of the finite element vehicle model Detailed finite element models wee ceated that coespond to the model used fo the design of the expeimental vehicle. The stuctue was fist designed in CAD envionment and then impoted in COMSOL Multiphysics [3] modelling envionment. The models wee constucted based on the mateial popeties and the geometic details of the stuctue. The finite element models fo the vehicle wee ceated using thee-dimensional tiangula shell finite elements to model the whole stuctue. In ode to investigate the sensitivity of the model eo due to the finite element discetization seveal models wee ceated deceasing the size of the elements in the finite element mesh. The esulted twelve finite element models consist of 886 to tiangula shell elements coesponding to 6 to DOF. The convegence in the fist eleven modefequencies pedicted by the finite element models with espect to the numbe of models DOF is given in Figue 5. Accoding to the esults in Figue 5, a model of 5468 finite elements having 4636 DOF was chosen fo the adequate modelling of the expeimental vehicle. This model is shown in Figue 6 and fo compaison puposes, Table lists the values of the modal fequencies pedicted by the nominal finite element models. Compaing with the identified modal fequency values it can be seen that, with the exception of the second modal fequency, the nominal FEM-based modal fequencies ae faily close to the expeimental ones. Repe- 9
 0-0 - 0-3 0-4 0 4 6 8 0 numbe of degees of feedom x 0 4 Figue 5: Relative eo of the modal fequencies pedicted by the finite element models with espect to the models numbe of")
10 sentative modeshapes pedicted by the finite element model ae shown in Figue 7 fo the fist and the fifth mode Relative eo (%) numbe of degees of feedom x 0 4 Figue 5: Relative eo of the modal fequencies pedicted by the finite element models with espect to the models numbe of degees of feedom. Figue 6: Finite element model of the expeimental vehicle consisted of 5468 tiangula shell elements and 4636 DOF. 0

, the fist paamete θ accounts fo the modulus of elasticity of the lowe pat of the expeimental vehicle, the second paamete θ accounts fo the modulus of")
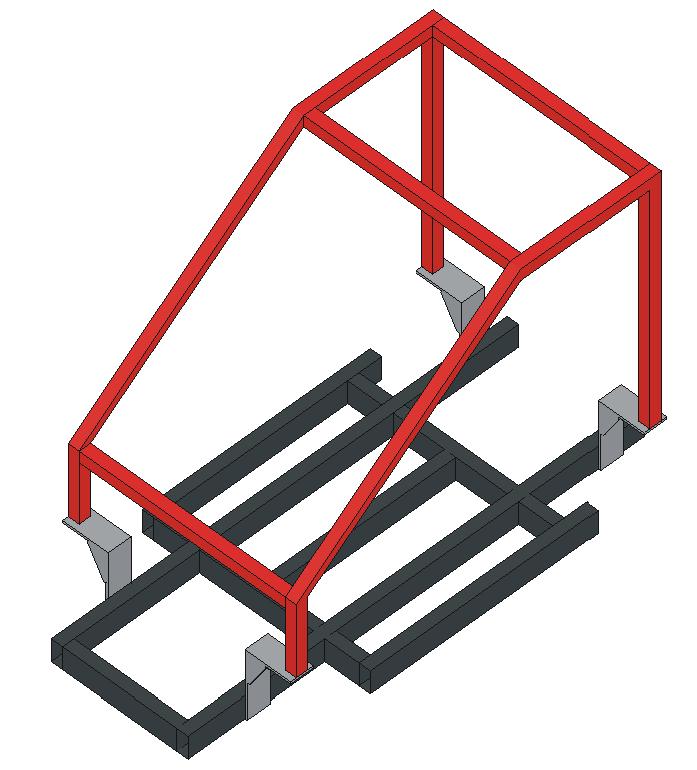
11 (a) (b) Figue 7: Modeshapes pedicted by the finite element model fo the (a) fist mode at 5.39 Hz and (b) fifth mode at Hz. Two diffeent paameteizations of the finite element model of the expeimental vehicle ae employed in ode to demonstate the applicability of the poposed finite element model updating methodologies, and point out issues associated with the multi-objective identification. The fist paameteized model consists of thee paametes, while the second paameteized model consist of six paametes. Fo the thee paamete model, shown in Figue 8(a), the fist paamete θ accounts fo the modulus of elasticity of the lowe pat of the expeimental vehicle, the second paamete θ accounts fo the modulus of elasticity of the pats (joints) that connect the lowe pat with the uppe pat (fame) of the expeimental vehicle, while the thid paamete θ 3 accounts fo the modulus of elasticity of the uppe pat of the expeimental vehicle. The nominal finite element model coesponds to values of θ= θ = θ3=. Fo the six paamete model, the fist paamete θ accounts fo the modulus of elasticity of the lowe pat of the expeimental vehicle, the second paamete θ accounts fo the modulus of elasticity of the pats (joints) that connect the lowe pat with the uppe pat of the expeimental vehicle, while the othe fou paametes θ 3, θ 4, θ 5 and θ 6 account fo the modulus of elasticity of the diffeent components of the uppe pat of the expeimental vehicle as shown in Figue 8(b). The nominal finite element model coesponds to values of θ= θ = θ3= θ4= θ5= θ 6 =. The paameteized finite element model classes ae updated using the eight lowest modal fequencies and modeshapes (modes and 3 to 9) obtained fom the modal analysis, excluding the second modal fequency and modeshape, and the two modal goups with modal esiduals given by (). The esults fom the multi-objective identification methodology fo the case of the thee paamete model ae shown in Figue 9. The nomal bounday intesection algoithm was used to estimate the Paeto solutions. Fo each model class and associated stuctual configuation, the Paeto font, giving the Paeto solutions in the two-dimensional objective space, is shown in Figue 9a. The non-zeo size of the Paeto font and the non-zeo distance of the Paeto font fom the oigin ae due to modeling and measuement eos. Specifically, the distance of the Paeto points along the Paeto font fom the oigin is an indication of the size of the oveall measuement and modeling eo. The size of the Paeto font depends on the size of the model eo and the sensitivity of the modal popeties to the paamete values θ []. Figues 9b-d show the coesponding Paeto optimal solutions in the thee-dimensional


12 paamete space. Specifically, these figues show the pojection of the Paeto solutions in the two-dimensional paamete spaces ( θ, θ), ( θ, θ3) and ( θ, θ3). It should be noted that the equally weighted solution is also computed and is shown in Figue 9. (a) (b) Figue 8: Paameteized finite element model classes of the expeimental vehicle, (a) thee paamete model and (b) six paamete model. It is obseved that a wide vaiety of Paeto optimal solutions ae obtained fo diffeent stuctual configuations that ae consistent with the measued data and the objective functions used. The Paeto optimal solutions ae concentated along a one-dimensional manifold in the thee-dimensional paamete space. Compaing the Paeto optimal solutions, it can be said that thee is no Paeto solution that impoves the fit in both modal goups simultaneously. Thus, all Paeto solutions coespond to acceptable compomise stuctual models tading-off the fit in the modal fequencies involved in the fist modal goup with the fit in the modeshape components involved in the second modal goups. The vaiability in the values of the model paametes ae of the ode of 5%, 7% and 8% fo θ, θ and θ3 espectively. It should be noted that the Paeto solutions 6 to 0 fom a one dimensional solution manifold in the paamete space that coespond to the non-identifiable solutions obtained by minimizing the second objective function. The eason fo such solutions to appea in the Paeto optimal set has been discussed in efeence [3]. Fo the case of the six paamete model, the Paeto font, giving the Paeto solutions in the two-dimensional objective space fom the multi-objective identification methodology ae shown in Figue 0(a). These esults ae compaed with the case of the thee paamete model. The six paamete model classes ae able to fit bette the expeimental esults and this is shown in Figue 0(a) obseving that the size of the Paeto font fo the case of the six paamete model classes is compaatively smalle than the thee paamete model classes and the distance fom the oigin is shote fo the six paamete model classes. The coesponding Paeto optimal solutions fo the six paamete model classes ae shown in Figue 0(b). The vaiability in the values of the model paametes ae of the ode of % fo θ, 3% fo θ, 4% fo θ3, % fo θ4, 9% fo θ5, and 0% fo θ6 espectively. It should be noted that the highest vaiability of 3% is obseved at the stiffness at the connections between the lowe and uppe pat of the vehicle. The lowest vaiability is obseved in the stiffness of the vetical membes located at the ea pat (Figue 8b) of the vehicle model.
13 J Paeto Solutions Equally weighted solution J θ θ.6.6 θ θ θ θ Figue 9: Paeto font and Paeto optimal solutions fo the thee paamete model classes in the (a) objective space and (b-d) paamete space. J Paeto Solutions fo 3 paametes Equally weighted fo 3 paametes Paeto Solutions fo 6 paametes Equally weighted fo 6 paametes Nominal model θ value θ θ θ 3 θ 4 θ 5 θ 6 θ w= J Numbe of of solution (a) (b) Figue 0: (a) Compaison of Paeto fonts between the thee paamete model classes and the six paamete model classes, (b) Paeto optimal solutions fo the six paamete model classes. The pecentage eo between the expeimental (identified) values of the modal fequencies and the values of the modal fequencies pedicted by the six paametes model fo the nominal values of the paametes, the equally weighted solution and the Paeto optimal solutions, 5, 0, 5 and 0 ae epoted in Table. Table 3 epots the MAC values between the model pedicted and the expeimental modeshapes fo the nominal, the equally weighted and the Paeto optimal models, 5, 0, 5 and 0. It is obseved that fo the modal fequencies the diffeence between the expeimental values and the values pedicted by the Paeto optimal model vay between 0.% and 5.9%. Specifically, fo the Paeto solution that coesponds to the one that minimizes the eos in the modal fequencies (fist objective function), the modal 3
14 fequency eos vay fom 0.% to.9%. Highest modal fequencies eos ae obseved as one moves towads Paeto solution 0 since such solutions ae based on minimizing a weighted measue of the esiduals in both the modal fequencies and the modeshapes. The eos fom the Paeto solutions ae significantly smalle than the eos obseved fo the nominal model which ae as high as 8.%. The MAC values between the expeimental modeshapes and the modeshapes pedicted by the Paeto optimal model vay between 0.84 and Fo the Paeto solution 0, the lowest MAC value is appoximately Relative fequency eo (%) Mode Nominal Equally Paeto solution model weighted Table : Relative eo between expeimental and model pedicted modal fequencies Mode Nominal Equally MAC value Paeto solution model weighted Table 3: MAC values between expeimental and model pedicted modeshapes The identified vaiability in Paeto optimal solutions has demonstated in [3] to consideably affect the vaiability in the esponse pedictions. Heein, the fequency esponse functions (FRF) pedicted by the Paeto optimal solutions ae compaed in Figue to the fequency esponse function computed diectly fom the measued data at senso locations 7 (see Figue 3) in the fequency ange [0Hz, 90Hz] used fo model updating. Compaed to the initial nominal model, it is obseved that the updated Paeto optimal models tend to consideably impove the fit between the model pedicted and the expeimentally obtained FRF in most fequency egions close to the esonance peaks. Also, it can be clealy seen that a elatively lage vaiability in the pedictions of the fequency esponse functions fom the diffeent Paeto optimal models is obseved which is due to the elatively lage vaiability in the identified Paeto optimal models. This vaiability is impotant to be taken into consideation 4
15 in the pedictions fom updated models in model updating techniques. It should be noted that besides fequency esponse functions, othe moe impotant esponse quantities of inteest ae the eliability of the stuctue against vaious modes of failue, as well as the fatigue accumulation and lifetime of the stuctue subjected to stochastic loads aising fom the vaiability in oad pofiles. 0 0 Expeimental Nominal model Paeto model Paeto model 5 Paeto model 0 Paeto model 5 Paeto model FRF Fequency (Hz) Figue : Compaison between measued and the pedicted FRF fom the Paeto models, 5, 0, 5, 0. The discepancies between the expeimental and the model pedicted modal fequencies as well as the deviations of the MAC values fom unity ae due to (a) the model eo, (b) the paameteization employed, and (c) the measuement eos. Specifically, the model eo aises fom the assumptions used to constuct the mathematical model of the stuctue. Fo the laboatoy vehicle model one should emphasize that the souces of model eo ae due to the assumptions used to build up the connections between the vaious pats compising the stuctue, as well as the use of shell elements to epesent the membes of the stuctue and the connections between the lowe and the uppe pat of the model. Also, elative small eos esults fom the size of the finite elements employed in the discetization scheme. Anothe souce that affects the model updating esults and the eos between the model pedictions and the measuements is the paameteization employed. An exhaustive seach fo the optimal paameteization scheme (numbe and type of paametes) has not been exploed in this wok. Howeve, intoducing moe paametes to be updated will impove the fit and educe the eos between the pedictions and the expeiment. Howeve, these eos cannot be eliminated and the emaining eos could be attibuted mainly to the model eo. The esulting eos povide guidance fo modifying the assumptions made to build the model in an effot to futhe impove modeling and obtain highe fidelity models able to adequately epesent the behavio of the expeimental vehicle stuctue in the fequency ange of inteest. 5 CONCLUSIONS Methods fo modal identification and stuctual model updating wee used to develop high fidelity finite element models of an expeimental vehicle model using acceleation measuements. A multi-objective stuctual identification method was used fo estimating the paametes of the finite element stuctual models based on minimizing two goups of modal esiduals, one associated with the modal fequencies and the othe with the modeshapes. The 5
16 constuction of high fidelity models consistent with the data depends on the assumptions made to build the mathematical model, the finite elements selected to model the diffeent pats of the stuctue, the dicetization scheme contolling the size of the finite elements, as well as the paameteization scheme used to define the numbe and type of paametes to be updated by the methodology. The multi-objective identification method esulted in multiple Paeto optimal stuctual models that ae consistent with the measued (identified) modal data and the two goups of modal esiduals used to measue the discepancies between the measued modal values and the modal values pedicted by the model. A wide vaiety of Paeto optimal stuctual models was obtained that tade off the fit in vaious measued modal quantities. These Paeto optimal models ae due to uncetainties aising fom model and measuement eos. The size of obseved vaiations in the Paeto optimal solutions depends on the infomation contained in the measued data, as well as the size of model and measuement eos. The vaiability in the Paeto optimal vehicle models esults in consideable vaiability in the pedictions of the esponse and eliability fom these stuctual models. Such vaiability should be taken into consideation when using the updated models fo pedictions. ACKNOWLEDGEMENTS This eseach was co-funded 75% fom the Euopean Union (Euopean Social Fund), 5% fom the Geek Ministy of Development (Geneal Secetaiat of Reseach and Technology) and fom the pivate secto, in the context of measue 8.3 of the Opeational Pogam Competitiveness (3 d Community Suppot Famewok Pogam) unde gant 03-ΕΔ-54 (PENED 003). This suppot is gatefully acknowledged. REFERENCES [] C. Papadimitiou, J.L. Beck, L.S. Katafygiotis, Updating obust eliability using stuctual test data. Pobabilistic Engineeing Mechanics, 6, 03-3, 00. [] C.P. Fitzen, D. Jennewein, T. Kiefe, Damage detection based on model updating methods. Mechanical Systems and Signal Pocessing, (), 63-86, 998. [3] A. Teughels, G. De Roeck, Damage detection and paamete identification by finite element model updating. Achives of Computational Methods in Engineeing, (), 3-64, 005. [4] M.W. Vanik, J.L. Beck, S.K. Au, Bayesian pobabilistic appoach to stuctual health monitoing. Jounal of Engineeing Mechanics (ASCE), 6, , 000. [5] E. Ntotsios, C. Papadimitiou, P. Panetsos, G. Kaaiskos, K. Peos, Ph. Pedikais, Bidge health monitoing system based on vibation measuements. Bulletin of Eathquake Engineeing, doi: 0.007/s , 008. [6] P. Metallidis, G. Veos, S. Natsiavas, C. Papadimitiou, Fault detection and optimal senso location in vehicle suspensions. Jounal of Vibation and Contol, 9, , 003. [7] P. Metallidis, I. Stavakis, S. Natsiavas, Paametic identification and health monitoing of complex gound vehicle models. Jounal of Vibation and Contol, 4, 0-036,
17 [8] K.V. Yuen, J.L. Beck, Reliability-based obust contol fo uncetain dynamical systems using feedback of incomplete noisy esponse measuements. Eathquake Engineeing and Stuctual Dynamics, 3 (5), , 003. [9] J.L. Beck, L.S. Katafygiotis, Updating models and thei uncetainties- I: Bayesian statistical famewok. Jounal of Engineeing Mechanics (ASCE), 4 (4), , 998. [0] D. Giagopoulos, C. Salpistis, S. Natsiavas, Effect of nonlineaities in the identification and fault detection of gea-pai systems. Intenational Jounal of Non-Linea Mechanics, 4, 3-30, 006. [] Y. Haalampidis, C. Papadimitiou, M. Pavlidou, Multi-objective famewok fo stuctual model identification. Eathquake Engineeing and Stuctual Dynamics, 34 (6), , 005. [] K. Chistodoulou, C. Papadimitiou, Stuctual identification based on optimally weighted modal esiduals. Mechanical Systems and Signal Pocessing,, 4-3, 007. [3] K. Chistodoulou, E. Ntotsios, C. Papadimitiou, P. Panetsos, Stuctual model updating and pediction vaiability using Paeto optimal models. Compute Methods in Applied Mechanics and Engineeing, 98 (), 38-49, 008. [4] E. Ntotsios, C. Papadimitiou, Multi-objective optimization algoithms fo finite element model updating. Intenational Confeence on Noise and Vibation Engineeing (ISMA008), Katholieke Univesiteit Leuven, Leuven, Belgium, Septembe 5-7, 008. [5] R.B. Nelson, Simplified calculation of eigenvecto deivatives. AIAA Jounal, 4 (9), 0-05, 976. [6] A. Teughels, G. De Roeck, J.A.K. Suykens, Global optimization by coupled local minimizes and its application to FE model updating. Computes and Stuctues, 8 (4-5), , 003. [7] H. G. Beye, The theoy of evolution stategies, Belin, Spinge-Velag, 00. [8] E. Zitzle, L. Thiele, Multi-objective evolutionay algoithms: A compaative case study and the stength Paeto appoach. IEEE Tansactions on Evolutionay Computation, 3, 57-7, 999. [9] I. Das, J.E. J. Dennis, Nomal-Bounday Intesection: A new method fo geneating the Paeto suface in nonlinea multi-citeia optimization poblems. SIAM Jounal of Optimization, 8, , 998. [0] E. Ntotsios, C. Papadimitiou, Multi-objective optimization famewok fo finite element model updating and esponse pediction vaiability. Inaugual Intenational Confeence of the Engineeing Mechanics Institute (EM08), Depatment of Civil Engineeing Univesity of Minnesota, Minneapolis, Minnesota, May 8-, 008. [] D. Giagopoulos, S. Natsiavas, Hybid (numeical-expeimental) modeling of complex stuctues with linea and nonlinea components. Nonlinea Dynamics, 47, 93-7, 007. [] E. Ntotsios, Expeimental modal analysis using ambient and eathquake vibations: Theoy, Softwae and Applications. MS Thesis Repot No. SDL-09-, Depatment of Mechanical and Industial Engineeing, Univesity of Thessaly, Volos, 008. [3] COMSOL AB, COMSOL Multiphysics use s guide, 005, [ 7
Identification of dynamic models of Metsovo (Greece) Bridge using ambient vibration measurements
 Bridge using ambient vibration measurements") Loughboough Univesity Institutional Repositoy Identification of dynamic models of Metsovo (Geece) Bidge using ambient vibation measuements This item was submitted to Loughboough Univesity's Institutional
Loughboough Univesity Institutional Repositoy Identification of dynamic models of Metsovo (Geece) Bidge using ambient vibation measuements This item was submitted to Loughboough Univesity's Institutional
Structural health monitoring of a ravine bridge of Egnatia Motorway during. construction.
 Loughboough Univesity Institutional Repositoy Stuctual health monitoing of a avine bidge of Egnatia Motoway duing constuction. This item was submitted to Loughboough Univesity's Institutional Repositoy
Loughboough Univesity Institutional Repositoy Stuctual health monitoing of a avine bidge of Egnatia Motoway duing constuction. This item was submitted to Loughboough Univesity's Institutional Repositoy
A modal estimation based multitype sensor placement method
 A modal estimation based multitype senso placement method *Xue-Yang Pei 1), Ting-Hua Yi 2) and Hong-Nan Li 3) 1),)2),3) School of Civil Engineeing, Dalian Univesity of Technology, Dalian 116023, China;
A modal estimation based multitype senso placement method *Xue-Yang Pei 1), Ting-Hua Yi 2) and Hong-Nan Li 3) 1),)2),3) School of Civil Engineeing, Dalian Univesity of Technology, Dalian 116023, China;
Optical Flow for Large Motion Using Gradient Technique
 SERBIAN JOURNAL OF ELECTRICAL ENGINEERING Vol. 3, No. 1, June 2006, 103-113 Optical Flow fo Lage Motion Using Gadient Technique Md. Moshaof Hossain Sake 1, Kamal Bechkoum 2, K.K. Islam 1 Abstact: In this
SERBIAN JOURNAL OF ELECTRICAL ENGINEERING Vol. 3, No. 1, June 2006, 103-113 Optical Flow fo Lage Motion Using Gadient Technique Md. Moshaof Hossain Sake 1, Kamal Bechkoum 2, K.K. Islam 1 Abstact: In this
Journal of World s Electrical Engineering and Technology J. World. Elect. Eng. Tech. 1(1): 12-16, 2012
: 12-16, 2012") 2011, Scienceline Publication www.science-line.com Jounal of Wold s Electical Engineeing and Technology J. Wold. Elect. Eng. Tech. 1(1): 12-16, 2012 JWEET An Efficient Algoithm fo Lip Segmentation in Colo
2011, Scienceline Publication www.science-line.com Jounal of Wold s Electical Engineeing and Technology J. Wold. Elect. Eng. Tech. 1(1): 12-16, 2012 JWEET An Efficient Algoithm fo Lip Segmentation in Colo
IP Network Design by Modified Branch Exchange Method
 Received: June 7, 207 98 IP Netwok Design by Modified Banch Method Kaiat Jaoenat Natchamol Sichumoenattana 2* Faculty of Engineeing at Kamphaeng Saen, Kasetsat Univesity, Thailand 2 Faculty of Management
Received: June 7, 207 98 IP Netwok Design by Modified Banch Method Kaiat Jaoenat Natchamol Sichumoenattana 2* Faculty of Engineeing at Kamphaeng Saen, Kasetsat Univesity, Thailand 2 Faculty of Management
Controlled Information Maximization for SOM Knowledge Induced Learning
 3 Int'l Conf. Atificial Intelligence ICAI'5 Contolled Infomation Maximization fo SOM Knowledge Induced Leaning Ryotao Kamimua IT Education Cente and Gaduate School of Science and Technology, Tokai Univeisity
3 Int'l Conf. Atificial Intelligence ICAI'5 Contolled Infomation Maximization fo SOM Knowledge Induced Leaning Ryotao Kamimua IT Education Cente and Gaduate School of Science and Technology, Tokai Univeisity
Segmentation of Casting Defects in X-Ray Images Based on Fractal Dimension
 17th Wold Confeence on Nondestuctive Testing, 25-28 Oct 2008, Shanghai, China Segmentation of Casting Defects in X-Ray Images Based on Factal Dimension Jue WANG 1, Xiaoqin HOU 2, Yufang CAI 3 ICT Reseach
17th Wold Confeence on Nondestuctive Testing, 25-28 Oct 2008, Shanghai, China Segmentation of Casting Defects in X-Ray Images Based on Factal Dimension Jue WANG 1, Xiaoqin HOU 2, Yufang CAI 3 ICT Reseach
Illumination methods for optical wear detection
 Illumination methods fo optical wea detection 1 J. Zhang, 2 P.P.L.Regtien 1 VIMEC Applied Vision Technology, Coy 43, 5653 LC Eindhoven, The Nethelands Email: jianbo.zhang@gmail.com 2 Faculty Electical
Illumination methods fo optical wea detection 1 J. Zhang, 2 P.P.L.Regtien 1 VIMEC Applied Vision Technology, Coy 43, 5653 LC Eindhoven, The Nethelands Email: jianbo.zhang@gmail.com 2 Faculty Electical
ADDING REALISM TO SOURCE CHARACTERIZATION USING A GENETIC ALGORITHM
 ADDING REALISM TO SOURCE CHARACTERIZATION USING A GENETIC ALGORITHM Luna M. Rodiguez*, Sue Ellen Haupt, and Geoge S. Young Depatment of Meteoology and Applied Reseach Laboatoy The Pennsylvania State Univesity,
ADDING REALISM TO SOURCE CHARACTERIZATION USING A GENETIC ALGORITHM Luna M. Rodiguez*, Sue Ellen Haupt, and Geoge S. Young Depatment of Meteoology and Applied Reseach Laboatoy The Pennsylvania State Univesity,
Transmission Lines Modeling Based on Vector Fitting Algorithm and RLC Active/Passive Filter Design
 Tansmission Lines Modeling Based on Vecto Fitting Algoithm and RLC Active/Passive Filte Design Ahmed Qasim Tuki a,*, Nashien Fazilah Mailah b, Mohammad Lutfi Othman c, Ahmad H. Saby d Cente fo Advanced
Tansmission Lines Modeling Based on Vecto Fitting Algoithm and RLC Active/Passive Filte Design Ahmed Qasim Tuki a,*, Nashien Fazilah Mailah b, Mohammad Lutfi Othman c, Ahmad H. Saby d Cente fo Advanced
Point-Biserial Correlation Analysis of Fuzzy Attributes
 Appl Math Inf Sci 6 No S pp 439S-444S (0 Applied Mathematics & Infomation Sciences An Intenational Jounal @ 0 NSP Natual Sciences Publishing o Point-iseial oelation Analysis of Fuzzy Attibutes Hao-En hueh
Appl Math Inf Sci 6 No S pp 439S-444S (0 Applied Mathematics & Infomation Sciences An Intenational Jounal @ 0 NSP Natual Sciences Publishing o Point-iseial oelation Analysis of Fuzzy Attibutes Hao-En hueh
Detection and Recognition of Alert Traffic Signs
 Detection and Recognition of Alet Taffic Signs Chia-Hsiung Chen, Macus Chen, and Tianshi Gao 1 Stanfod Univesity Stanfod, CA 9305 {echchen, macuscc, tianshig}@stanfod.edu Abstact Taffic signs povide dives
Detection and Recognition of Alet Taffic Signs Chia-Hsiung Chen, Macus Chen, and Tianshi Gao 1 Stanfod Univesity Stanfod, CA 9305 {echchen, macuscc, tianshig}@stanfod.edu Abstact Taffic signs povide dives
Assessment of Track Sequence Optimization based on Recorded Field Operations
 Assessment of Tack Sequence Optimization based on Recoded Field Opeations Matin A. F. Jensen 1,2,*, Claus G. Søensen 1, Dionysis Bochtis 1 1 Aahus Univesity, Faculty of Science and Technology, Depatment
Assessment of Tack Sequence Optimization based on Recoded Field Opeations Matin A. F. Jensen 1,2,*, Claus G. Søensen 1, Dionysis Bochtis 1 1 Aahus Univesity, Faculty of Science and Technology, Depatment
Adaptation of Motion Capture Data of Human Arms to a Humanoid Robot Using Optimization
 ICCAS25 June 2-5, KINTEX, Gyeonggi-Do, Koea Adaptation of Motion Captue Data of Human Ams to a Humanoid Robot Using Optimization ChangHwan Kim and Doik Kim Intelligent Robotics Reseach Cente, Koea Institute
ICCAS25 June 2-5, KINTEX, Gyeonggi-Do, Koea Adaptation of Motion Captue Data of Human Ams to a Humanoid Robot Using Optimization ChangHwan Kim and Doik Kim Intelligent Robotics Reseach Cente, Koea Institute
SYSTEM LEVEL REUSE METRICS FOR OBJECT ORIENTED SOFTWARE : AN ALTERNATIVE APPROACH
 I J C A 7(), 202 pp. 49-53 SYSTEM LEVEL REUSE METRICS FOR OBJECT ORIENTED SOFTWARE : AN ALTERNATIVE APPROACH Sushil Goel and 2 Rajesh Vema Associate Pofesso, Depatment of Compute Science, Dyal Singh College,
I J C A 7(), 202 pp. 49-53 SYSTEM LEVEL REUSE METRICS FOR OBJECT ORIENTED SOFTWARE : AN ALTERNATIVE APPROACH Sushil Goel and 2 Rajesh Vema Associate Pofesso, Depatment of Compute Science, Dyal Singh College,
Fifth Wheel Modelling and Testing
 Fifth heel Modelling and Testing en Masoy Mechanical Engineeing Depatment Floida Atlantic Univesity Boca aton, FL 4 Lois Malaptias IFMA Institut Fancais De Mechanique Advancee ampus De lemont Feand Les
Fifth heel Modelling and Testing en Masoy Mechanical Engineeing Depatment Floida Atlantic Univesity Boca aton, FL 4 Lois Malaptias IFMA Institut Fancais De Mechanique Advancee ampus De lemont Feand Les
Drag Optimization on Rear Box of a Simplified Car Model by Robust Parameter Design
 Vol.2, Issue.3, May-June 2012 pp-1253-1259 ISSN: 2249-6645 Dag Optimization on Rea Box of a Simplified Ca Model by Robust Paamete Design Sajjad Beigmoadi 1, Asgha Ramezani 2 *(Automotive Engineeing Depatment,
Vol.2, Issue.3, May-June 2012 pp-1253-1259 ISSN: 2249-6645 Dag Optimization on Rea Box of a Simplified Ca Model by Robust Paamete Design Sajjad Beigmoadi 1, Asgha Ramezani 2 *(Automotive Engineeing Depatment,
Extract Object Boundaries in Noisy Images using Level Set. Final Report
 Extact Object Boundaies in Noisy Images using Level Set by: Quming Zhou Final Repot Submitted to Pofesso Bian Evans EE381K Multidimensional Digital Signal Pocessing May 10, 003 Abstact Finding object contous
Extact Object Boundaies in Noisy Images using Level Set by: Quming Zhou Final Repot Submitted to Pofesso Bian Evans EE381K Multidimensional Digital Signal Pocessing May 10, 003 Abstact Finding object contous
A Two-stage and Parameter-free Binarization Method for Degraded Document Images
 A Two-stage and Paamete-fee Binaization Method fo Degaded Document Images Yung-Hsiang Chiu 1, Kuo-Liang Chung 1, Yong-Huai Huang 2, Wei-Ning Yang 3, Chi-Huang Liao 4 1 Depatment of Compute Science and
A Two-stage and Paamete-fee Binaization Method fo Degaded Document Images Yung-Hsiang Chiu 1, Kuo-Liang Chung 1, Yong-Huai Huang 2, Wei-Ning Yang 3, Chi-Huang Liao 4 1 Depatment of Compute Science and
Modal Parameter Identification Using Particle Swarm Optimization
 Modal Paamete Identification Using Paticle Swam Optimization M. El-Kafafy, A. Elsawaf, B. Peetes, T. Vampola, P. Guillaume Abstact In this pape, the applicability of Paticle Swam Optimization (PSO) to
Modal Paamete Identification Using Paticle Swam Optimization M. El-Kafafy, A. Elsawaf, B. Peetes, T. Vampola, P. Guillaume Abstact In this pape, the applicability of Paticle Swam Optimization (PSO) to
A ROI Focusing Mechanism for Digital Cameras
 A ROI Focusing Mechanism fo Digital Cameas Chu-Hui Lee, Meng-Feng Lin, Chun-Ming Huang, and Chun-Wei Hsu Abstact With the development and application of digital technologies, the digital camea is moe popula
A ROI Focusing Mechanism fo Digital Cameas Chu-Hui Lee, Meng-Feng Lin, Chun-Ming Huang, and Chun-Wei Hsu Abstact With the development and application of digital technologies, the digital camea is moe popula
A Novel Automatic White Balance Method For Digital Still Cameras
 A Novel Automatic White Balance Method Fo Digital Still Cameas Ching-Chih Weng 1, Home Chen 1,2, and Chiou-Shann Fuh 3 Depatment of Electical Engineeing, 2 3 Gaduate Institute of Communication Engineeing
A Novel Automatic White Balance Method Fo Digital Still Cameas Ching-Chih Weng 1, Home Chen 1,2, and Chiou-Shann Fuh 3 Depatment of Electical Engineeing, 2 3 Gaduate Institute of Communication Engineeing
New Algorithms for Daylight Harvesting in a Private Office
 18th Intenational Confeence on Infomation Fusion Washington, DC - July 6-9, 2015 New Algoithms fo Daylight Havesting in a Pivate Office Rohit Kuma Lighting Solutions and Sevices Philips Reseach Noth Ameica
18th Intenational Confeence on Infomation Fusion Washington, DC - July 6-9, 2015 New Algoithms fo Daylight Havesting in a Pivate Office Rohit Kuma Lighting Solutions and Sevices Philips Reseach Noth Ameica
An Unsupervised Segmentation Framework For Texture Image Queries
 An Unsupevised Segmentation Famewok Fo Textue Image Queies Shu-Ching Chen Distibuted Multimedia Infomation System Laboatoy School of Compute Science Floida Intenational Univesity Miami, FL 33199, USA chens@cs.fiu.edu
An Unsupevised Segmentation Famewok Fo Textue Image Queies Shu-Ching Chen Distibuted Multimedia Infomation System Laboatoy School of Compute Science Floida Intenational Univesity Miami, FL 33199, USA chens@cs.fiu.edu
Color Correction Using 3D Multiview Geometry
 Colo Coection Using 3D Multiview Geomety Dong-Won Shin and Yo-Sung Ho Gwangju Institute of Science and Technology (GIST) 13 Cheomdan-gwagio, Buk-ku, Gwangju 500-71, Republic of Koea ABSTRACT Recently,
Colo Coection Using 3D Multiview Geomety Dong-Won Shin and Yo-Sung Ho Gwangju Institute of Science and Technology (GIST) 13 Cheomdan-gwagio, Buk-ku, Gwangju 500-71, Republic of Koea ABSTRACT Recently,
A Shape-preserving Affine Takagi-Sugeno Model Based on a Piecewise Constant Nonuniform Fuzzification Transform
 A Shape-peseving Affine Takagi-Sugeno Model Based on a Piecewise Constant Nonunifom Fuzzification Tansfom Felipe Fenández, Julio Gutiéez, Juan Calos Cespo and Gacián Tiviño Dep. Tecnología Fotónica, Facultad
A Shape-peseving Affine Takagi-Sugeno Model Based on a Piecewise Constant Nonunifom Fuzzification Tansfom Felipe Fenández, Julio Gutiéez, Juan Calos Cespo and Gacián Tiviño Dep. Tecnología Fotónica, Facultad
A VECTOR PERTURBATION APPROACH TO THE GENERALIZED AIRCRAFT SPARE PARTS GROUPING PROBLEM
 Accepted fo publication Intenational Jounal of Flexible Automation and Integated Manufactuing. A VECTOR PERTURBATION APPROACH TO THE GENERALIZED AIRCRAFT SPARE PARTS GROUPING PROBLEM Nagiza F. Samatova,
Accepted fo publication Intenational Jounal of Flexible Automation and Integated Manufactuing. A VECTOR PERTURBATION APPROACH TO THE GENERALIZED AIRCRAFT SPARE PARTS GROUPING PROBLEM Nagiza F. Samatova,
Accurate Diffraction Efficiency Control for Multiplexed Volume Holographic Gratings. Xuliang Han, Gicherl Kim, and Ray T. Chen
 Accuate Diffaction Efficiency Contol fo Multiplexed Volume Hologaphic Gatings Xuliang Han, Gichel Kim, and Ray T. Chen Micoelectonic Reseach Cente Depatment of Electical and Compute Engineeing Univesity
Accuate Diffaction Efficiency Contol fo Multiplexed Volume Hologaphic Gatings Xuliang Han, Gichel Kim, and Ray T. Chen Micoelectonic Reseach Cente Depatment of Electical and Compute Engineeing Univesity
All lengths in meters. E = = 7800 kg/m 3
 Poblem desciption In this poblem, we apply the component mode synthesis (CMS) technique to a simple beam model. 2 0.02 0.02 All lengths in metes. E = 2.07 10 11 N/m 2 = 7800 kg/m 3 The beam is a fee-fee
Poblem desciption In this poblem, we apply the component mode synthesis (CMS) technique to a simple beam model. 2 0.02 0.02 All lengths in metes. E = 2.07 10 11 N/m 2 = 7800 kg/m 3 The beam is a fee-fee
IP Multicast Simulation in OPNET
 IP Multicast Simulation in OPNET Xin Wang, Chien-Ming Yu, Henning Schulzinne Paul A. Stipe Columbia Univesity Reutes Depatment of Compute Science 88 Pakway Dive South New Yok, New Yok Hauppuage, New Yok
IP Multicast Simulation in OPNET Xin Wang, Chien-Ming Yu, Henning Schulzinne Paul A. Stipe Columbia Univesity Reutes Depatment of Compute Science 88 Pakway Dive South New Yok, New Yok Hauppuage, New Yok
On Error Estimation in Runge-Kutta Methods
 Leonado Jounal of Sciences ISSN 1583-0233 Issue 18, Januay-June 2011 p. 1-10 On Eo Estimation in Runge-Kutta Methods Ochoche ABRAHAM 1,*, Gbolahan BOLARIN 2 1 Depatment of Infomation Technology, 2 Depatment
Leonado Jounal of Sciences ISSN 1583-0233 Issue 18, Januay-June 2011 p. 1-10 On Eo Estimation in Runge-Kutta Methods Ochoche ABRAHAM 1,*, Gbolahan BOLARIN 2 1 Depatment of Infomation Technology, 2 Depatment
Information Retrieval. CS630 Representing and Accessing Digital Information. IR Basics. User Task. Basic IR Processes
 CS630 Repesenting and Accessing Digital Infomation Infomation Retieval: Basics Thosten Joachims Conell Univesity Infomation Retieval Basics Retieval Models Indexing and Pepocessing Data Stuctues ~ 4 lectues
CS630 Repesenting and Accessing Digital Infomation Infomation Retieval: Basics Thosten Joachims Conell Univesity Infomation Retieval Basics Retieval Models Indexing and Pepocessing Data Stuctues ~ 4 lectues
Lecture # 04. Image Enhancement in Spatial Domain
 Digital Image Pocessing CP-7008 Lectue # 04 Image Enhancement in Spatial Domain Fall 2011 2 domains Spatial Domain : (image plane) Techniques ae based on diect manipulation of pixels in an image Fequency
Digital Image Pocessing CP-7008 Lectue # 04 Image Enhancement in Spatial Domain Fall 2011 2 domains Spatial Domain : (image plane) Techniques ae based on diect manipulation of pixels in an image Fequency
A Recommender System for Online Personalization in the WUM Applications
 A Recommende System fo Online Pesonalization in the WUM Applications Mehdad Jalali 1, Nowati Mustapha 2, Ali Mamat 2, Md. Nasi B Sulaiman 2 Abstact foeseeing of use futue movements and intentions based
A Recommende System fo Online Pesonalization in the WUM Applications Mehdad Jalali 1, Nowati Mustapha 2, Ali Mamat 2, Md. Nasi B Sulaiman 2 Abstact foeseeing of use futue movements and intentions based
Modelling, simulation, and performance analysis of a CAN FD system with SAE benchmark based message set
 Modelling, simulation, and pefomance analysis of a CAN FD system with SAE benchmak based message set Mahmut Tenuh, Panagiotis Oikonomidis, Peiklis Chachalakis, Elias Stipidis Mugla S. K. Univesity, TR;
Modelling, simulation, and pefomance analysis of a CAN FD system with SAE benchmak based message set Mahmut Tenuh, Panagiotis Oikonomidis, Peiklis Chachalakis, Elias Stipidis Mugla S. K. Univesity, TR;
Signal integrity analysis and physically based circuit extraction of a mounted
 emc design & softwae Signal integity analysis and physically based cicuit extaction of a mounted SMA connecto A poposed geneal appoach is given fo the definition of an equivalent cicuit with SMAs mounted
emc design & softwae Signal integity analysis and physically based cicuit extaction of a mounted SMA connecto A poposed geneal appoach is given fo the definition of an equivalent cicuit with SMAs mounted
Topological Characteristic of Wireless Network
 Topological Chaacteistic of Wieless Netwok Its Application to Node Placement Algoithm Husnu Sane Naman 1 Outline Backgound Motivation Papes and Contibutions Fist Pape Second Pape Thid Pape Futue Woks Refeences
Topological Chaacteistic of Wieless Netwok Its Application to Node Placement Algoithm Husnu Sane Naman 1 Outline Backgound Motivation Papes and Contibutions Fist Pape Second Pape Thid Pape Futue Woks Refeences
A New and Efficient 2D Collision Detection Method Based on Contact Theory Xiaolong CHENG, Jun XIAO a, Ying WANG, Qinghai MIAO, Jian XUE
 5th Intenational Confeence on Advanced Mateials and Compute Science (ICAMCS 2016) A New and Efficient 2D Collision Detection Method Based on Contact Theoy Xiaolong CHENG, Jun XIAO a, Ying WANG, Qinghai
5th Intenational Confeence on Advanced Mateials and Compute Science (ICAMCS 2016) A New and Efficient 2D Collision Detection Method Based on Contact Theoy Xiaolong CHENG, Jun XIAO a, Ying WANG, Qinghai
A Mathematical Implementation of a Global Human Walking Model with Real-Time Kinematic Personification by Boulic, Thalmann and Thalmann.
 A Mathematical Implementation of a Global Human Walking Model with Real-Time Kinematic Pesonification by Boulic, Thalmann and Thalmann. Mashall Badley National Cente fo Physical Acoustics Univesity of
A Mathematical Implementation of a Global Human Walking Model with Real-Time Kinematic Pesonification by Boulic, Thalmann and Thalmann. Mashall Badley National Cente fo Physical Acoustics Univesity of
Positioning of a robot based on binocular vision for hand / foot fusion Long Han
 2nd Intenational Confeence on Advances in Mechanical Engineeing and Industial Infomatics (AMEII 26) Positioning of a obot based on binocula vision fo hand / foot fusion Long Han Compute Science and Technology,
2nd Intenational Confeence on Advances in Mechanical Engineeing and Industial Infomatics (AMEII 26) Positioning of a obot based on binocula vision fo hand / foot fusion Long Han Compute Science and Technology,
Spiral Recognition Methodology and Its Application for Recognition of Chinese Bank Checks
 Spial Recognition Methodology and Its Application fo Recognition of Chinese Bank Checks Hanshen Tang 1, Emmanuel Augustin 2, Ching Y. Suen 1, Olivie Baet 2, Mohamed Cheiet 3 1 Cente fo Patten Recognition
Spial Recognition Methodology and Its Application fo Recognition of Chinese Bank Checks Hanshen Tang 1, Emmanuel Augustin 2, Ching Y. Suen 1, Olivie Baet 2, Mohamed Cheiet 3 1 Cente fo Patten Recognition
Title. Author(s)NOMURA, K.; MOROOKA, S. Issue Date Doc URL. Type. Note. File Information
NOMURA, K.; MOROOKA, S. Issue Date Doc URL. Type. Note. File Information") Title CALCULATION FORMULA FOR A MAXIMUM BENDING MOMENT AND THE TRIANGULAR SLAB WITH CONSIDERING EFFECT OF SUPPO UNIFORM LOAD Autho(s)NOMURA, K.; MOROOKA, S. Issue Date 2013-09-11 Doc URL http://hdl.handle.net/2115/54220
Title CALCULATION FORMULA FOR A MAXIMUM BENDING MOMENT AND THE TRIANGULAR SLAB WITH CONSIDERING EFFECT OF SUPPO UNIFORM LOAD Autho(s)NOMURA, K.; MOROOKA, S. Issue Date 2013-09-11 Doc URL http://hdl.handle.net/2115/54220
Experimental and numerical simulation of the flow over a spillway
 Euopean Wate 57: 253-260, 2017. 2017 E.W. Publications Expeimental and numeical simulation of the flow ove a spillway A. Seafeim *, L. Avgeis, V. Hissanthou and K. Bellos Depatment of Civil Engineeing,
Euopean Wate 57: 253-260, 2017. 2017 E.W. Publications Expeimental and numeical simulation of the flow ove a spillway A. Seafeim *, L. Avgeis, V. Hissanthou and K. Bellos Depatment of Civil Engineeing,
An Assessment of the Efficiency of Close-Range Photogrammetry for Developing a Photo-Based Scanning Systeminthe Shams Tabrizi Minaret in Khoy City
 Austalian Jounal of Basic and Applied Sciences, 5(1): 80-85, 011 ISSN 1991-8178 An Assessment of the Efficiency of Close-Range Photogammety fo Developing a Photo-Based Scanning Systeminthe Shams Tabizi
Austalian Jounal of Basic and Applied Sciences, 5(1): 80-85, 011 ISSN 1991-8178 An Assessment of the Efficiency of Close-Range Photogammety fo Developing a Photo-Based Scanning Systeminthe Shams Tabizi
Vehicle Chassis Control Using Adaptive Semi-Active Suspension
 Poceedings of the 17th Wold Congess The Intenational Fedeation of Automatic Contol Vehicle Chassis Contol Using Adaptive Semi-Active Suspension V. Sankaanaayanan, Sinan Oncu, Dince Ocan, and Levent Güvenç
Poceedings of the 17th Wold Congess The Intenational Fedeation of Automatic Contol Vehicle Chassis Contol Using Adaptive Semi-Active Suspension V. Sankaanaayanan, Sinan Oncu, Dince Ocan, and Levent Güvenç
The EigenRumor Algorithm for Ranking Blogs
 he EigenRumo Algoithm fo Ranking Blogs Ko Fujimua N Cybe Solutions Laboatoies N Copoation akafumi Inoue N Cybe Solutions Laboatoies N Copoation Masayuki Sugisaki N Resonant Inc. ABSRAC he advent of easy
he EigenRumo Algoithm fo Ranking Blogs Ko Fujimua N Cybe Solutions Laboatoies N Copoation akafumi Inoue N Cybe Solutions Laboatoies N Copoation Masayuki Sugisaki N Resonant Inc. ABSRAC he advent of easy
Tissue Classification Based on 3D Local Intensity Structures for Volume Rendering
 160 IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS, VOL. 6, NO., APRIL-JUNE 000 Tissue Classification Based on 3D Local Intensity Stuctues fo Volume Rendeing Yoshinobu Sato, Membe, IEEE, Cal-Fedik
160 IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS, VOL. 6, NO., APRIL-JUNE 000 Tissue Classification Based on 3D Local Intensity Stuctues fo Volume Rendeing Yoshinobu Sato, Membe, IEEE, Cal-Fedik
3D inspection system for manufactured machine parts
 3D inspection system fo manufactued machine pats D. Gacía a*, J. M. Sebastián a*, F. M. Sánchez a*, L. M. Jiménez b*, J. M. González a* a Dept. of System Engineeing and Automatic Contol. Polytechnic Univesity
3D inspection system fo manufactued machine pats D. Gacía a*, J. M. Sebastián a*, F. M. Sánchez a*, L. M. Jiménez b*, J. M. González a* a Dept. of System Engineeing and Automatic Contol. Polytechnic Univesity
Effects of Model Complexity on Generalization Performance of Convolutional Neural Networks
 Effects of Model Complexity on Genealization Pefomance of Convolutional Neual Netwoks Tae-Jun Kim 1, Dongsu Zhang 2, and Joon Shik Kim 3 1 Seoul National Univesity, Seoul 151-742, Koea, E-mail: tjkim@bi.snu.ac.k
Effects of Model Complexity on Genealization Pefomance of Convolutional Neual Netwoks Tae-Jun Kim 1, Dongsu Zhang 2, and Joon Shik Kim 3 1 Seoul National Univesity, Seoul 151-742, Koea, E-mail: tjkim@bi.snu.ac.k
INCORPORATION OF ADVANCED NUMERICAL FIELD ANALYSIS TECHNIQUES IN THE INDUSTRIAL TRANSFORMER DESIGN PROCESS
 INCORPORATION OF ADVANCED NUMERICAL FIELD ANALYSIS TECHNIQUES IN THE INDUSTRIAL TRANSFORMER DESIGN PROCESS M A Tsili 1, A G Kladas 1, P S Geogilakis 2, A T Souflais 3 and D G Papaigas 3 1 National Technical
INCORPORATION OF ADVANCED NUMERICAL FIELD ANALYSIS TECHNIQUES IN THE INDUSTRIAL TRANSFORMER DESIGN PROCESS M A Tsili 1, A G Kladas 1, P S Geogilakis 2, A T Souflais 3 and D G Papaigas 3 1 National Technical
a Not yet implemented in current version SPARK: Research Kit Pointer Analysis Parameters Soot Pointer analysis. Objectives
 SPARK: Soot Reseach Kit Ondřej Lhoták Objectives Spak is a modula toolkit fo flow-insensitive may points-to analyses fo Java, which enables expeimentation with: vaious paametes of pointe analyses which
SPARK: Soot Reseach Kit Ondřej Lhoták Objectives Spak is a modula toolkit fo flow-insensitive may points-to analyses fo Java, which enables expeimentation with: vaious paametes of pointe analyses which
Multi-azimuth Prestack Time Migration for General Anisotropic, Weakly Heterogeneous Media - Field Data Examples
 Multi-azimuth Pestack Time Migation fo Geneal Anisotopic, Weakly Heteogeneous Media - Field Data Examples S. Beaumont* (EOST/PGS) & W. Söllne (PGS) SUMMARY Multi-azimuth data acquisition has shown benefits
Multi-azimuth Pestack Time Migation fo Geneal Anisotopic, Weakly Heteogeneous Media - Field Data Examples S. Beaumont* (EOST/PGS) & W. Söllne (PGS) SUMMARY Multi-azimuth data acquisition has shown benefits
Haptic Glove. Chan-Su Lee. Abstract. This is a final report for the DIMACS grant of student-initiated project. I implemented Boundary
 Physically Accuate Haptic Rendeing of Elastic Object fo a Haptic Glove Chan-Su Lee Abstact This is a final epot fo the DIMACS gant of student-initiated poject. I implemented Bounday Element Method(BEM)
Physically Accuate Haptic Rendeing of Elastic Object fo a Haptic Glove Chan-Su Lee Abstact This is a final epot fo the DIMACS gant of student-initiated poject. I implemented Bounday Element Method(BEM)
Efficient Gradient Stencils for Robust Implicit Finite-Volume Solver Convergence on Distorted Grids
 Pepint accepted in Jounal of Computational Physics (oiginally submitted in August, 208). Download the jounal vesion at https://doi.og/0.06/j.jcp.209.02.026 Efficient Gadient Stencils fo Robust Implicit
Pepint accepted in Jounal of Computational Physics (oiginally submitted in August, 208). Download the jounal vesion at https://doi.og/0.06/j.jcp.209.02.026 Efficient Gadient Stencils fo Robust Implicit
vaiation than the fome. Howeve, these methods also beak down as shadowing becomes vey signicant. As we will see, the pesented algoithm based on the il
 IEEE Conf. on Compute Vision and Patten Recognition, 1998. To appea. Illumination Cones fo Recognition Unde Vaiable Lighting: Faces Athinodoos S. Geoghiades David J. Kiegman Pete N. Belhumeu Cente fo Computational
IEEE Conf. on Compute Vision and Patten Recognition, 1998. To appea. Illumination Cones fo Recognition Unde Vaiable Lighting: Faces Athinodoos S. Geoghiades David J. Kiegman Pete N. Belhumeu Cente fo Computational
IDENTIFICATION OF DYNAMIC MODELS OF METSOVO (GREECE) BRIDGE USING AMBIENT VIBRATION MEASUREMENTS
 BRIDGE USING AMBIENT VIBRATION MEASUREMENTS") COMPDYN 009 ECCOMAS Thematic Conference on Computational Methods in Structural Dynamics and Earthquake Engineering M. Papadrakakis, N.D. Lagaros, M. Fragiadakis (eds.) Rhodes, Greece, 4 June 009 IDENTIFICATION
COMPDYN 009 ECCOMAS Thematic Conference on Computational Methods in Structural Dynamics and Earthquake Engineering M. Papadrakakis, N.D. Lagaros, M. Fragiadakis (eds.) Rhodes, Greece, 4 June 009 IDENTIFICATION
Generalized Grey Target Decision Method Based on Decision Makers Indifference Attribute Value Preferences
 Ameican Jounal of ata ining and Knowledge iscovey 27; 2(4): 2-8 http://www.sciencepublishinggoup.com//admkd doi:.648/.admkd.2724.2 Genealized Gey Taget ecision ethod Based on ecision akes Indiffeence Attibute
Ameican Jounal of ata ining and Knowledge iscovey 27; 2(4): 2-8 http://www.sciencepublishinggoup.com//admkd doi:.648/.admkd.2724.2 Genealized Gey Taget ecision ethod Based on ecision akes Indiffeence Attibute
Improvement of First-order Takagi-Sugeno Models Using Local Uniform B-splines 1
 Impovement of Fist-ode Takagi-Sugeno Models Using Local Unifom B-splines Felipe Fenández, Julio Gutiéez, Gacián Tiviño and Juan Calos Cespo Dep. Tecnología Fotónica, Facultad de Infomática Univesidad Politécnica
Impovement of Fist-ode Takagi-Sugeno Models Using Local Unifom B-splines Felipe Fenández, Julio Gutiéez, Gacián Tiviño and Juan Calos Cespo Dep. Tecnología Fotónica, Facultad de Infomática Univesidad Politécnica
Voting-Based Grouping and Interpretation of Visual Motion
 Voting-Based Gouping and Intepetation of Visual Motion Micea Nicolescu Depatment of Compute Science Univesity of Nevada, Reno Reno, NV 89557 micea@cs.un.edu Géad Medioni Integated Media Systems Cente Univesity
Voting-Based Gouping and Intepetation of Visual Motion Micea Nicolescu Depatment of Compute Science Univesity of Nevada, Reno Reno, NV 89557 micea@cs.un.edu Géad Medioni Integated Media Systems Cente Univesity
AUTOMATED LOCATION OF ICE REGIONS IN RADARSAT SAR IMAGERY
 AUTOMATED LOCATION OF ICE REGIONS IN RADARSAT SAR IMAGERY Chistophe Waceman (1), William G. Pichel (2), Pablo Clement-Colón (2) (1) Geneal Dynamics Advanced Infomation Systems, P.O. Box 134008 Ann Abo
AUTOMATED LOCATION OF ICE REGIONS IN RADARSAT SAR IMAGERY Chistophe Waceman (1), William G. Pichel (2), Pablo Clement-Colón (2) (1) Geneal Dynamics Advanced Infomation Systems, P.O. Box 134008 Ann Abo
Introduction to Engineering Seismology Lecture 18
 Lectue 18: Intoduction to GIS, Integation of hazad paametes on GIS platfom; Final zonation map pepaation with case study of Bangaloe Topics Geogaphical Infomation System (GIS) Analytic Hieachy Pocess (AHP)
Lectue 18: Intoduction to GIS, Integation of hazad paametes on GIS platfom; Final zonation map pepaation with case study of Bangaloe Topics Geogaphical Infomation System (GIS) Analytic Hieachy Pocess (AHP)
Directional Stiffness of Electronic Component Lead
 Diectional Stiffness of Electonic Component Lead Chang H. Kim Califonia State Univesit, Long Beach Depatment of Mechanical and Aeospace Engineeing 150 Bellflowe Boulevad Long Beach, CA 90840-830, USA Abstact
Diectional Stiffness of Electonic Component Lead Chang H. Kim Califonia State Univesit, Long Beach Depatment of Mechanical and Aeospace Engineeing 150 Bellflowe Boulevad Long Beach, CA 90840-830, USA Abstact
Clustering Interval-valued Data Using an Overlapped Interval Divergence
 Poc. of the 8th Austalasian Data Mining Confeence (AusDM'9) Clusteing Inteval-valued Data Using an Ovelapped Inteval Divegence Yongli Ren Yu-Hsn Liu Jia Rong Robet Dew School of Infomation Engineeing,
Poc. of the 8th Austalasian Data Mining Confeence (AusDM'9) Clusteing Inteval-valued Data Using an Ovelapped Inteval Divegence Yongli Ren Yu-Hsn Liu Jia Rong Robet Dew School of Infomation Engineeing,
Obstacle Avoidance of Autonomous Mobile Robot using Stereo Vision Sensor
 Obstacle Avoidance of Autonomous Mobile Robot using Steeo Vision Senso Masako Kumano Akihisa Ohya Shin ichi Yuta Intelligent Robot Laboatoy Univesity of Tsukuba, Ibaaki, 35-8573 Japan E-mail: {masako,
Obstacle Avoidance of Autonomous Mobile Robot using Steeo Vision Senso Masako Kumano Akihisa Ohya Shin ichi Yuta Intelligent Robot Laboatoy Univesity of Tsukuba, Ibaaki, 35-8573 Japan E-mail: {masako,
MULTI-TEMPORAL AND MULTI-SENSOR IMAGE MATCHING BASED ON LOCAL FREQUENCY INFORMATION
 Intenational Achives of the Photogammety Remote Sensing and Spatial Infomation Sciences Volume XXXIX-B3 2012 XXII ISPRS Congess 25 August 01 Septembe 2012 Melboune Austalia MULTI-TEMPORAL AND MULTI-SENSOR
Intenational Achives of the Photogammety Remote Sensing and Spatial Infomation Sciences Volume XXXIX-B3 2012 XXII ISPRS Congess 25 August 01 Septembe 2012 Melboune Austalia MULTI-TEMPORAL AND MULTI-SENSOR
Scaling Location-based Services with Dynamically Composed Location Index
 Scaling Location-based Sevices with Dynamically Composed Location Index Bhuvan Bamba, Sangeetha Seshadi and Ling Liu Distibuted Data Intensive Systems Laboatoy (DiSL) College of Computing, Geogia Institute
Scaling Location-based Sevices with Dynamically Composed Location Index Bhuvan Bamba, Sangeetha Seshadi and Ling Liu Distibuted Data Intensive Systems Laboatoy (DiSL) College of Computing, Geogia Institute
Research Article. Regularization Rotational motion image Blur Restoration
 Available online www.jocp.com Jounal of Chemical and Phamaceutical Reseach, 6, 8(6):47-476 Reseach Aticle ISSN : 975-7384 CODEN(USA) : JCPRC5 Regulaization Rotational motion image Blu Restoation Zhen Chen
Available online www.jocp.com Jounal of Chemical and Phamaceutical Reseach, 6, 8(6):47-476 Reseach Aticle ISSN : 975-7384 CODEN(USA) : JCPRC5 Regulaization Rotational motion image Blu Restoation Zhen Chen
CLUSTERED BASED TAKAGI-SUGENO NEURO-FUZZY MODELING OF A MULTIVARIABLE NONLINEAR DYNAMIC SYSTEM
 Asian Jounal of Contol, Vol. 7, No., pp. 63-76, June 5 63 -Bief Pape- CLUSTERED BASED TAKAGI-SUGENO NEURO-FUZZY MODELING OF A MULTIVARIABLE NONLINEAR DYNAMIC SYSTEM E. A. Al-Gallaf ABSTRACT This eseach
Asian Jounal of Contol, Vol. 7, No., pp. 63-76, June 5 63 -Bief Pape- CLUSTERED BASED TAKAGI-SUGENO NEURO-FUZZY MODELING OF A MULTIVARIABLE NONLINEAR DYNAMIC SYSTEM E. A. Al-Gallaf ABSTRACT This eseach
Image Enhancement in the Spatial Domain. Spatial Domain
 8-- Spatial Domain Image Enhancement in the Spatial Domain What is spatial domain The space whee all pixels fom an image In spatial domain we can epesent an image by f( whee x and y ae coodinates along
8-- Spatial Domain Image Enhancement in the Spatial Domain What is spatial domain The space whee all pixels fom an image In spatial domain we can epesent an image by f( whee x and y ae coodinates along
COMPARISON OF CHIRP SCALING AND WAVENUMBER DOMAIN ALGORITHMS FOR AIRBORNE LOW FREQUENCY SAR DATA PROCESSING
 COMPARISON OF CHIRP SCALING AND WAVENUMBER DOMAIN ALGORITHMS FOR AIRBORNE LOW FREQUENCY SAR DATA PROCESSING A. Potsis a, A. Reigbe b, E. Alivisatos a, A. Moeia c,and N. Uzunoglu a a National Technical
COMPARISON OF CHIRP SCALING AND WAVENUMBER DOMAIN ALGORITHMS FOR AIRBORNE LOW FREQUENCY SAR DATA PROCESSING A. Potsis a, A. Reigbe b, E. Alivisatos a, A. Moeia c,and N. Uzunoglu a a National Technical
MODELING TOOL FAILURES IN SEMICONDUCTOR FAB SIMULATION. Oliver Rose. Institute of Computer Science University of Würzburg Würzburg, 97074, GERMANY.
 Poceedings of the 004 Winte Simulation Confeence.G. Ingalls M. D. ossetti J. S. Smith and B.. Petes eds. MODELING TOOL FILUES IN SEMICONDUCTO FB SIMULTION Olive Institute of Compute Science Univesity of
Poceedings of the 004 Winte Simulation Confeence.G. Ingalls M. D. ossetti J. S. Smith and B.. Petes eds. MODELING TOOL FILUES IN SEMICONDUCTO FB SIMULTION Olive Institute of Compute Science Univesity of
RANDOM IRREGULAR BLOCK-HIERARCHICAL NETWORKS: ALGORITHMS FOR COMPUTATION OF MAIN PROPERTIES
 RANDOM IRREGULAR BLOCK-HIERARCHICAL NETWORKS: ALGORITHMS FOR COMPUTATION OF MAIN PROPERTIES Svetlana Avetisyan Mikayel Samvelyan* Matun Kaapetyan Yeevan State Univesity Abstact In this pape, the class
RANDOM IRREGULAR BLOCK-HIERARCHICAL NETWORKS: ALGORITHMS FOR COMPUTATION OF MAIN PROPERTIES Svetlana Avetisyan Mikayel Samvelyan* Matun Kaapetyan Yeevan State Univesity Abstact In this pape, the class
A refined r-factor algorithm for TVD schemes on arbitrary unstructured meshes
 A efined -facto algoithm fo TVD schemes on abitay unstuctued meshes Di Zhang 1,, Chunbo Jiang 1,*, Liang Cheng 2, 3, Dongfang Liang 4 1 State Key Laboatoy of Hydoscience and Engineeing, Tsinghua nivesity,
A efined -facto algoithm fo TVD schemes on abitay unstuctued meshes Di Zhang 1,, Chunbo Jiang 1,*, Liang Cheng 2, 3, Dongfang Liang 4 1 State Key Laboatoy of Hydoscience and Engineeing, Tsinghua nivesity,
Comparisons of Transient Analytical Methods for Determining Hydraulic Conductivity Using Disc Permeameters
 Compaisons of Tansient Analytical Methods fo Detemining Hydaulic Conductivity Using Disc Pemeametes 1,,3 Cook, F.J. 1 CSRO Land and Wate, ndoooopilly, Queensland The Univesity of Queensland, St Lucia,
Compaisons of Tansient Analytical Methods fo Detemining Hydaulic Conductivity Using Disc Pemeametes 1,,3 Cook, F.J. 1 CSRO Land and Wate, ndoooopilly, Queensland The Univesity of Queensland, St Lucia,
Data mining based automated reverse engineering and defect discovery
 Data mining based automated evese engineeing and defect discovey James F. Smith III, ThanhVu H. Nguyen Naval Reseach Laboatoy, Code 5741, Washington, D.C., 20375-5000 ABSTRACT A data mining based pocedue
Data mining based automated evese engineeing and defect discovey James F. Smith III, ThanhVu H. Nguyen Naval Reseach Laboatoy, Code 5741, Washington, D.C., 20375-5000 ABSTRACT A data mining based pocedue
Towards Adaptive Information Merging Using Selected XML Fragments
 Towads Adaptive Infomation Meging Using Selected XML Fagments Ho-Lam Lau and Wilfed Ng Depatment of Compute Science and Engineeing, The Hong Kong Univesity of Science and Technology, Hong Kong {lauhl,
Towads Adaptive Infomation Meging Using Selected XML Fagments Ho-Lam Lau and Wilfed Ng Depatment of Compute Science and Engineeing, The Hong Kong Univesity of Science and Technology, Hong Kong {lauhl,
Performance Optimization in Structured Wireless Sensor Networks
 5 The Intenational Aab Jounal of Infomation Technology, Vol. 6, o. 5, ovembe 9 Pefomance Optimization in Stuctued Wieless Senso etwoks Amine Moussa and Hoda Maalouf Compute Science Depatment, ote Dame
5 The Intenational Aab Jounal of Infomation Technology, Vol. 6, o. 5, ovembe 9 Pefomance Optimization in Stuctued Wieless Senso etwoks Amine Moussa and Hoda Maalouf Compute Science Depatment, ote Dame
OPTIMUM DESIGN OF 3R ORTHOGONAL MANIPULATORS CONSIDERING ITS TOPOLOGY
 Copyight by ABCM Page 38 OPTIMUM DESIGN OF 3R ORTHOGONAL MANIPULATORS CONSIDERING ITS TOPOLOGY Giovana Tindade da Silva Oliveia, gtindadeso@yahoo.com.b School of Mechanical Engineeing, Fedeal Univesity
Copyight by ABCM Page 38 OPTIMUM DESIGN OF 3R ORTHOGONAL MANIPULATORS CONSIDERING ITS TOPOLOGY Giovana Tindade da Silva Oliveia, gtindadeso@yahoo.com.b School of Mechanical Engineeing, Fedeal Univesity
Cardiac C-Arm CT. SNR Enhancement by Combining Multiple Retrospectively Motion Corrected FDK-Like Reconstructions
 Cadiac C-Am CT SNR Enhancement by Combining Multiple Retospectively Motion Coected FDK-Like Reconstuctions M. Pümme 1, L. Wigstöm 2,3, R. Fahig 2, G. Lauitsch 4, J. Honegge 1 1 Institute of Patten Recognition,
Cadiac C-Am CT SNR Enhancement by Combining Multiple Retospectively Motion Coected FDK-Like Reconstuctions M. Pümme 1, L. Wigstöm 2,3, R. Fahig 2, G. Lauitsch 4, J. Honegge 1 1 Institute of Patten Recognition,
INFORMATION DISSEMINATION DELAY IN VEHICLE-TO-VEHICLE COMMUNICATION NETWORKS IN A TRAFFIC STREAM
 INFORMATION DISSEMINATION DELAY IN VEHICLE-TO-VEHICLE COMMUNICATION NETWORKS IN A TRAFFIC STREAM LiLi Du Depatment of Civil, Achitectual, and Envionmental Engineeing Illinois Institute of Technology 3300
INFORMATION DISSEMINATION DELAY IN VEHICLE-TO-VEHICLE COMMUNICATION NETWORKS IN A TRAFFIC STREAM LiLi Du Depatment of Civil, Achitectual, and Envionmental Engineeing Illinois Institute of Technology 3300
Haptic Simulation of a Tool In Contact With a Nonlinear Deformable Body
 In IS4TM: Intenational Symposium on Sugey Simulation and Soft Tissue Modelling Lectue Notes in Compute Science (LNCS 2673), N. Ayache and H. Delingette (Eds), Spinge Velag, New Yok. 2003. pp. 311-320.
In IS4TM: Intenational Symposium on Sugey Simulation and Soft Tissue Modelling Lectue Notes in Compute Science (LNCS 2673), N. Ayache and H. Delingette (Eds), Spinge Velag, New Yok. 2003. pp. 311-320.
Desired Attitude Angles Design Based on Optimization for Side Window Detection of Kinetic Interceptor *
 Poceedings of the 7 th Chinese Contol Confeence July 6-8, 008, Kunming,Yunnan, China Desied Attitude Angles Design Based on Optimization fo Side Window Detection of Kinetic Intecepto * Zhu Bo, Quan Quan,
Poceedings of the 7 th Chinese Contol Confeence July 6-8, 008, Kunming,Yunnan, China Desied Attitude Angles Design Based on Optimization fo Side Window Detection of Kinetic Intecepto * Zhu Bo, Quan Quan,
Three-Dimensional Aerodynamic Design Optimization of a Turbine Blade by Using an Adjoint Method
 Jiaqi Luo e-mail: jiaqil@uci.edu Juntao Xiong Feng Liu e-mail: fliu@uci.edu Depatment of Mechanical and Aeospace Engineeing, Univesity of Califonia, Ivine, Ivine, CA 92697-3975 Ivan McBean Alstom Powe
Jiaqi Luo e-mail: jiaqil@uci.edu Juntao Xiong Feng Liu e-mail: fliu@uci.edu Depatment of Mechanical and Aeospace Engineeing, Univesity of Califonia, Ivine, Ivine, CA 92697-3975 Ivan McBean Alstom Powe
A Minutiae-based Fingerprint Matching Algorithm Using Phase Correlation
 A Minutiae-based Fingepint Matching Algoithm Using Phase Coelation Autho Chen, Weiping, Gao, Yongsheng Published 2007 Confeence Title Digital Image Computing: Techniques and Applications DOI https://doi.og/10.1109/dicta.2007.4426801
A Minutiae-based Fingepint Matching Algoithm Using Phase Coelation Autho Chen, Weiping, Gao, Yongsheng Published 2007 Confeence Title Digital Image Computing: Techniques and Applications DOI https://doi.og/10.1109/dicta.2007.4426801
Structured Light Stereoscopic Imaging with Dynamic Pseudo-random Patterns
 Stuctued Light Steeoscopic Imaging with Dynamic Pseudo-andom Pattens Piee Payeu and Danick Desjadins Univesity of Ottawa, SITE, 800 King Edwad, Ottawa, ON, Canada, K1N 6N5 {ppayeu,ddesjad}@site.uottawa.ca
Stuctued Light Steeoscopic Imaging with Dynamic Pseudo-andom Pattens Piee Payeu and Danick Desjadins Univesity of Ottawa, SITE, 800 King Edwad, Ottawa, ON, Canada, K1N 6N5 {ppayeu,ddesjad}@site.uottawa.ca
Detection and tracking of ships using a stereo vision system
 Scientific Reseach and Essays Vol. 8(7), pp. 288-303, 18 Febuay, 2013 Available online at http://www.academicjounals.og/sre DOI: 10.5897/SRE12.318 ISSN 1992-2248 2013 Academic Jounals Full Length Reseach
Scientific Reseach and Essays Vol. 8(7), pp. 288-303, 18 Febuay, 2013 Available online at http://www.academicjounals.og/sre DOI: 10.5897/SRE12.318 ISSN 1992-2248 2013 Academic Jounals Full Length Reseach
ANN Models for Coplanar Strip Line Analysis and Synthesis
 200 IJCSNS Intenational Jounal of Compute Science and Netwok Secuity, VOL.8 No.10, Octobe 2008 Models fo Coplana Stip Line Analysis and J.Lakshmi Naayana D.K.Si Rama Kishna D.L.Patap Reddy Chalapathi Institute
200 IJCSNS Intenational Jounal of Compute Science and Netwok Secuity, VOL.8 No.10, Octobe 2008 Models fo Coplana Stip Line Analysis and J.Lakshmi Naayana D.K.Si Rama Kishna D.L.Patap Reddy Chalapathi Institute
OPTIMAL KINEMATIC SYNTHESIS OF CRANK & SLOTTED LEVER QUICK RETURN MECHANISM FOR SPECIFIC STROKE & TIME RATIO
 OPTIMAL KINEMATIC SYNTHESIS OF CRANK & SLOTTED LEVER QUICK RETURN MECHANISM FOR SPECIFIC STROKE & TIME RATIO Zeeshan A. Shaikh 1 and T.Y. Badguja 2 1,2 Depatment of Mechanical Engineeing, Late G. N. Sapkal
OPTIMAL KINEMATIC SYNTHESIS OF CRANK & SLOTTED LEVER QUICK RETURN MECHANISM FOR SPECIFIC STROKE & TIME RATIO Zeeshan A. Shaikh 1 and T.Y. Badguja 2 1,2 Depatment of Mechanical Engineeing, Late G. N. Sapkal
Conservation Law of Centrifugal Force and Mechanism of Energy Transfer Caused in Turbomachinery
 Poceedings of the 4th WSEAS Intenational Confeence on luid Mechanics and Aeodynamics, Elounda, Geece, August 1-3, 006 (pp337-34) Consevation Law of Centifugal oce and Mechanism of Enegy Tansfe Caused in
Poceedings of the 4th WSEAS Intenational Confeence on luid Mechanics and Aeodynamics, Elounda, Geece, August 1-3, 006 (pp337-34) Consevation Law of Centifugal oce and Mechanism of Enegy Tansfe Caused in
3D Hand Trajectory Segmentation by Curvatures and Hand Orientation for Classification through a Probabilistic Approach
 3D Hand Tajectoy Segmentation by Cuvatues and Hand Oientation fo Classification though a Pobabilistic Appoach Diego R. Faia and Joge Dias Abstact In this wok we pesent the segmentation and classification
3D Hand Tajectoy Segmentation by Cuvatues and Hand Oientation fo Classification though a Pobabilistic Appoach Diego R. Faia and Joge Dias Abstact In this wok we pesent the segmentation and classification
UCLA Papers. Title. Permalink. Authors. Publication Date. Localized Edge Detection in Sensor Fields. https://escholarship.org/uc/item/3fj6g58j
 UCLA Papes Title Localized Edge Detection in Senso Fields Pemalink https://escholashipog/uc/item/3fj6g58j Authos K Chintalapudi Govindan Publication Date 3-- Pee eviewed escholashipog Poweed by the Califonia
UCLA Papes Title Localized Edge Detection in Senso Fields Pemalink https://escholashipog/uc/item/3fj6g58j Authos K Chintalapudi Govindan Publication Date 3-- Pee eviewed escholashipog Poweed by the Califonia
Erasure-Coding Based Routing for Opportunistic Networks
 Easue-Coding Based Routing fo Oppotunistic Netwoks Yong Wang, Sushant Jain, Magaet Matonosi, Kevin Fall Pinceton Univesity, Univesity of Washington, Intel Reseach Bekeley ABSTRACT Routing in Delay Toleant
Easue-Coding Based Routing fo Oppotunistic Netwoks Yong Wang, Sushant Jain, Magaet Matonosi, Kevin Fall Pinceton Univesity, Univesity of Washington, Intel Reseach Bekeley ABSTRACT Routing in Delay Toleant
Effective Data Co-Reduction for Multimedia Similarity Search
 Effective Data Co-Reduction fo Multimedia Similaity Seach Zi Huang Heng Tao Shen Jiajun Liu Xiaofang Zhou School of Infomation Technology and Electical Engineeing The Univesity of Queensland, QLD 472,
Effective Data Co-Reduction fo Multimedia Similaity Seach Zi Huang Heng Tao Shen Jiajun Liu Xiaofang Zhou School of Infomation Technology and Electical Engineeing The Univesity of Queensland, QLD 472,
Image Registration among UAV Image Sequence and Google Satellite Image Under Quality Mismatch
 0 th Intenational Confeence on ITS Telecommunications Image Registation among UAV Image Sequence and Google Satellite Image Unde Quality Mismatch Shih-Ming Huang and Ching-Chun Huang Depatment of Electical
0 th Intenational Confeence on ITS Telecommunications Image Registation among UAV Image Sequence and Google Satellite Image Unde Quality Mismatch Shih-Ming Huang and Ching-Chun Huang Depatment of Electical
LOSSLESS audio coding is used in such applications as
 INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2013, VOL. 59, NO. 1, PP. 17 23 Manuscipt eceived Januay 10, 2013; evised Mach, 2013. DOI: 10.2478/eletel-2013-0002 Novel Ideas fo Lossless Audio Coding
INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2013, VOL. 59, NO. 1, PP. 17 23 Manuscipt eceived Januay 10, 2013; evised Mach, 2013. DOI: 10.2478/eletel-2013-0002 Novel Ideas fo Lossless Audio Coding
PROBABILITY-BASED OPTIMAL PATH PLANNING FOR TWO-WHEELED MOBILE ROBOTS
 Poceedings of the ASME 215 Dynamic Systems and Contol Confeence DSCC215 Octobe 28-3, 215, Columbus, Ohio, USA DSCC215-999 PROBABILITY-BASED OPTIMAL PATH PLANNING FOR TWO-WHEELED MOBILE ROBOTS Jaeyeon Lee
Poceedings of the ASME 215 Dynamic Systems and Contol Confeence DSCC215 Octobe 28-3, 215, Columbus, Ohio, USA DSCC215-999 PROBABILITY-BASED OPTIMAL PATH PLANNING FOR TWO-WHEELED MOBILE ROBOTS Jaeyeon Lee
COLOR EDGE DETECTION IN RGB USING JOINTLY EUCLIDEAN DISTANCE AND VECTOR ANGLE
 COLOR EDGE DETECTION IN RGB USING JOINTLY EUCLIDEAN DISTANCE AND VECTOR ANGLE Slawo Wesolkowski Systems Design Engineeing Univesity of Wateloo Wateloo (Ont.), Canada, NL 3G s.wesolkowski@ieee.og Ed Jenigan
COLOR EDGE DETECTION IN RGB USING JOINTLY EUCLIDEAN DISTANCE AND VECTOR ANGLE Slawo Wesolkowski Systems Design Engineeing Univesity of Wateloo Wateloo (Ont.), Canada, NL 3G s.wesolkowski@ieee.og Ed Jenigan
Ego-Motion Estimation on Range Images using High-Order Polynomial Expansion
 Ego-Motion Estimation on Range Images using High-Ode Polynomial Expansion Bian Okon and Josh Haguess Space and Naval Wafae Systems Cente Pacific San Diego, CA, USA {bian.okon,joshua.haguess}@navy.mil Abstact
Ego-Motion Estimation on Range Images using High-Ode Polynomial Expansion Bian Okon and Josh Haguess Space and Naval Wafae Systems Cente Pacific San Diego, CA, USA {bian.okon,joshua.haguess}@navy.mil Abstact
WIRELESS sensor networks (WSNs), which are capable
, which are capable") IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. XX, NO. XX, XXX 214 1 Lifetime and Enegy Hole Evolution Analysis in Data-Gatheing Wieless Senso Netwoks Ju Ren, Student Membe, IEEE, Yaoxue Zhang, Kuan
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. XX, NO. XX, XXX 214 1 Lifetime and Enegy Hole Evolution Analysis in Data-Gatheing Wieless Senso Netwoks Ju Ren, Student Membe, IEEE, Yaoxue Zhang, Kuan