arxiv: v2 [cs.cv] 26 Jul 2016
|
|
|
- Arron Walsh
- 6 years ago
- Views:
Transcription
1 arxiv: v2 [cs.cv] 26 Jul 2016 Learning to Refine Object Segments Pedro O. Pinheiro, Tsung-Yi Lin, Ronan Collobert, Piotr Dollár Facebook AI Research (FAIR) Abstract. Object segmentation requires both object-level information and low-level pixel data. This presents a challenge for feedforward networks: lower layers in olutional nets capture rich spatial information, while upper layers encode object-level knowledge but are invariant to factors such as pose and appearance. In this work we propose to augment feedforward nets for object segmentation with a novel top-down refinement approach. The resulting bottom-up/top-down architecture is capable of efficiently generating high-fidelity object masks. Similarly to skip connections, our approach leverages features at all layers of the net. Unlike skip connections, our approach does not attempt to output independent predictions at each layer. Instead, we first output a coarse mask encoding in a feedforward pass, then refine this mask encoding in a topdown pass utilizing features at successively lower layers. The approach is simple, fast, and effective. Building on the recent DeepMask network for generating object proposals, we show accuracy improvements of 10-20% in average recall for various setups. Additionally, by optimizing the overall network architecture, our approach, which we call SharpMask, is 50% faster than the original DeepMask network (under.8s per image). 1 Introduction As object detection [1 8] has rapidly progressed, there has been a renewed interest in object instance segmentation [9]. As the name implies, the goal is to both detect and segment each individual object. The task is related to both object detection with bounding boxes [9 11] and semantic segmentation [10, 12 19]. It involves challenges from both domains, requiring accurate pixel-level object segmentation coupled with identification of each individual object instance. A number of recent papers have explored the use olutional neural networks (CNNs) [20] for object instance segmentation [21 24]. Standard feedforward CNNs [25 28] interleave olutional layers (with pointwise nonlinearities) and pooling layers. Pooling controls model capacity and increases receptive field size, resulting in a coarse, highly-semantic feature representation. While effective and necessary for extracting object-level information, this general architecture results in low resolution features that are invariant to pixel-level variations. This is beneficial for classification and identifying object instances but poses challenge for pixel-labeling tasks. Hence, CNNs that utilize only upper network layers for Authors contributed equally to this work while at FAIR. Current affiliations: Pedro O. Pinheiro is with the Idiap Research Institute and Ecole Polytechnique Fédérale de Lausanne (EPFL); Tsung-Yi Lin is with Cornell University and Cornell Tech.
2 2 Pinheiro, Lin, Collobert, Dollár 56x56 mx1x1 14x14 14x14 mx1x1 14x14 14x14 R 1 M i 14x14 56x x56 R 2 56x56 R 3 F i 3x3 M i S i 3x3 56x56 56x56 112x112 2x up 112x x x x112 R 4 M i+1 224x x x x224 (a) feedforward (b) feedforward + skip (c) proposed network (d) refinement module Fig. 1: Architectures for object instance segmentation. (a) Feedforward nets, such as DeepMask [22], predict masks using only upper-layer CNN features, resulting in coarse pixel masks. (b) Common skip architectures are equivalent to making independent predictions from each layer and averaging the results [24, 29, 30], such an approach is not well suited for object instance segmentation. (c,d) In this work we propose to augment feedforward nets with a novel top-down refinement approach. The resulting bottom-up/top-down architecture is capable of efficiently generating high-fidelity object masks. 56x56 object instance segmentation [21 23], as in Figure 1a, can effectively generate coarse object masks but have difficulty generating pixel-accurate segmentations. For pixel-labeling tasks such as semantic segmentation and edge detection, skip connections [24, 29 31], as shown in Figure 1b, are popular. In practice, common skip architectures are equivalent to making independent predictions from each network layer and upsampling and averaging the results (see Fig. 2 in [24], Fig. 3 in [29], and Fig. 3 in [30]). This is effective for semantic segmentation as local receptive fields in early layers can provide sufficient data for pixel labeling. For object segmentation, however, it is necessary to differentiate between object instances, for which local receptive fields are insufficient (e.g. local patches of sheep fur can be labeled as such but without object-level information it can be difficult to determine if they belong to the same animal). In this paper, we propose a novel CNN which efficiently merges the spatially rich information from low-level features with the high-level object knowledge encoded in upper network layers. Rather than generating independent outputs from multiple network layers, our approach first generates a coarse mask encoding in a feedforward manner, which is simply a semantically meaningful feature map with multiple channels, then refines it by successively integrating information from earlier layers. Specifically, we introduce a refinement module and stack successive such modules together into a top-down refinement process. See Fig-
3 Learning to Refine Object Segments 3 ures 1c and 1d. Each refinement module is responsible for inverting the effect of pooling by taking a mask encoding generated in the top-down pass, along with the matching features from the bottom-up pass, and merging the information in both to generate a new mask encoding with double the spatial resolution. The process continues until full resolution is restored and the final output encodes the object mask. The refinement module is efficient and fully backpropable. We apply our approach in the context of object proposal generation [32 38]. The seminal object detection work on R-CNN [5] follows a two-phase approach: first, an object proposal algorithm is used to find regions in images that may contain objects; second, a CNN assigns each proposal a category label. While originally object proposals were constructed from low-level grouping and saliency cues [38], recently CNNs have been adopted for this task [3, 7, 22], leading to massive improvements in detection accuracy. In particular, Pinheiro et al. [22] demonstrated how to adopt a CNN to generate rich object instance segmentations in an image. The proposed model, called DeepMask, predicts how likely an image patch is to fully contain a centered object and also outputs an associated segmentation mask for the object, if present. The model is run olutionally to generate a dense set of object proposals for an image. DeepMask outperforms previous object segment proposal methods by a substantial margin [22]. In this work we utilize the DeepMask architecture as our starting point for object instance segmentation due to its simplicity and effectiveness. We augment the basic DeepMask architecture with our refinement module (see Figure 1) and refer to the resulting approach as SharpMask to emphasize its ability to produce sharper, higher-fidelity object segmentation masks. In addition to the top-down refinement, we also revisit the basic bottom-up architecture of the DeepMask network and likewise optimize it for the segmentation task. SharpMask improves segmentation mask quality relative to DeepMask. For object proposal generation, average recall on the COCO dataset [9] improves 10-20% and establishes the new state-of-the-art on this task. Moreover, we optimize our core architecture and improve speed by 50% with respect to DeepMask, with an average of.76s per image. Our fast model, which still outperforms previous results, runs at.46s, or, by using additional image scales, we can boost small object recall by 2. Finally we show SharpMask proposals substantially improve object detection results when coupled with the Fast R-CNN detector [6]. The paper is organized as follows: 2 presents related work, 3 introduces our novel top-down refinement network, 4 describes optimizations to the network architecture, and finally 5 validates our approach experimentally. All source code for reproducing the methods in this paper will be released. 2 Related Work Following their success in image classification [25 28], CNNs have been adopted with great effect to pixel-labeling tasks such as depth estimation [15], optical flow [39], and semantic segmentation [13]. Below we describe architectural innovations for such tasks, and discuss how they relate to our approach. Aside
4 4 Pinheiro, Lin, Collobert, Dollár from skip connections [24, 29 31], which were discussed in 1, these techniques can be roughly classified as multiscale architectures, deolutional networks, and graphical model networks. We discuss each in turn next. We emphasize, however, that most of these approaches are not applicable to our domain due to severe computational constraints: we must refine hundreds of proposals per image implying the marginal time per proposal must be minimal. Multiscale architectures: [13 15] compute features over multiple rescaled versions of an image. Features can be computed independently at each scale [13], or the output from one scale can be used as additional input to the next finer scale [14,15]. Our approach relies on similar intuition but does not require recomputing features at each image scale. This allows us to apply refinement efficiently to hundreds of locations per image as necessary for object proposal generation. Deolutional networks: [40] proposed to invert the pooling process in a CNN to generate progressively higher resolution input images by storing the switch variables from the pooling operation. De networks have recently been applied successfully to semantic segmentation [19]. De layers share similarities with our refinement module, however, switches are communicated instead of the feature values, which limits the information that can be transferred. Finally, [39] proposed to progressively increase the resolution of an optical flow map. This can be seen as a special case of our refinement approach where: (1) the features for refinement are set to be the flow field itself, (2) no feature transform is applied to the bottom-up features, and (3) the approach is applied monolithically to the entire image. Restricting our method in any of these ways would cause it to fail in our setting as discussed in 5. Graphical model networks: a number of recent papers have proposed integrating graphical models into CNNs by demonstrating they can be formulated as recurrent nets [16 18]. Good results were demonstrated on semantic segmentation. While too slow to apply to multiple proposals per image, these approaches likewise attempt to sharpen a coarse segmentation mask. 3 Learning Mask Refinement We apply our proposed bottom-up/top-down refinement architecture to object instance segmentation. Specifically, we focus on object proposal generation [38], which forms the cornerstone of modern object detection [5]. We note that although we test the proposed refinement architecture on the task of object segmentation, it could potentially be applied to other pixel-labeling tasks. Object proposal algorithms aim to find diverse regions in an image which are likely to contain objects; both proposal recall and quality correlate strongly with detector performance [38]. We adopt the DeepMask network [22] as the starting point for proposal generation. DeepMask is trained to jointly generate a classagnostic object mask and an associated objectness score for each input image patch. At inference time, the model is run olutionally to generate a dense set of scored segmentation proposals. We refer readers to [22] for full details.




5 Learning to Refine Object Segments 5 (a) DeepMask Output (b) SharpMask Output Fig. 2: Qualitative comparison of DeepMask versus SharpMask segmentations. Proposals with highest IoU to the ground truth are shown for each method. Both DeepMask and SharpMask generate object masks that capture the general shape of the objects. However, SharpMask improves the masks near object boundaries. A simplified diagram of the segmentation branch of DeepMask is illustrated in Figure 1a. The network is trained to infer the mask for the object located in the center of the input patch. It contains a series of olutional layers interleaved with pooling stages that reduce the spatial dimensions of the feature maps, followed by a fully connected layer to generate the object mask. Hence, each pixel prediction is based on a complete view of the object, however, its input feature resolution is low due to the multiple pooling stages. As a result, DeepMask generates masks that are accurate on the object level but only coarsely align with object boundaries, see Figure 2a. In order to obtain higher-quality masks, we augment the basic DeepMask architecture with our refinement approach. We refer to the resulting method as SharpMask to emphasize its ability to produce sharper, pixel-accurate object masks, see Figure 2b. We begin with a high-level overview of our approach followed by further details. 3.1 Refinement Overview Our goal is to efficiently merge the spatially rich information from low-level features with the high-level semantic information encoded in upper network layers. Three principles guide our approach: (1) object-level information is often necessary to segment an object, (2) given object-level information, segmentation should proceed in a top-down fashion, successively integrating information from earlier layers, and (3) the approach should invert the loss of resolution from pooling (with the final output matching the resolution of the input). To satisfy these principles, we augment standard feedforward nets with a topdown refinement process. An overview of our approach is shown in Figure 1c. We introduce a refinement module R that is responsible for inverting the effect of pooling and doubling the resolution of the input mask encoding. Each module
6 6 Pinheiro, Lin, Collobert, Dollár R i takes as input a mask encoding M i generated in the top-down pass, along with matching features F i generated in the bottom-up pass, and learns to merge the information to generate a new upsampled object encoding M i+1. In other words: M i+1 = R i (M i, F i ), see Figure 1d. Multiple such modules are stacked (one module per pooling layer). The final output of our network is a pixel labeling of the same resolution as the input image. We present full details next. 3.2 Refinement Details The feedforward pathway of our network outputs a mask encoding M 1, or simply, a low-resolution but semantically meaningful feature map with km 1 channels. M 1 serves as the input to the top-down refinement module, which is responsible for progressively increasing the mask encoding s resolution. Note that using km 1 > 1 allows the mask encoding to capture more information than a simple segmentation mask, which proves to be key for obtaining good accuracy. Each refinement module R i aggregates information from a coarse mask encoding M i and features F i from the corresponding layer of the bottom-up computation (we always use the last olutional layer prior to pooling). By construction, M i and F i have the same spatial dimensions; the goal of R i is to generate a new mask encoding M i+1 with double spatial resolution based on inputs M i and F i. We denote this via M i+1 = R i (M i, F i ). This process is applied iteratively n times (where n is the number of pooling stages) until the feature map has the same dimensions as the input image patch. Each module R i has separate parameters, allowing the network to learn stage-specific refinements. The refinement module aims to enhance the mask encoding M i using features F i. As M i and F i have the same spatial dimensions, one option is to first simply concatenate M i and F i. However, directly concatenating F i with M i poses two challenges. Let km i and kf i be the number of channels in M i and F i respectively. Typically, kf i can be quite large in modern CNNs, so using F i directly would be computationally expensive. Second, typically kf i ki m, so directly concatenating the features maps risks drowning out the signal in M i. Instead, we opt to first reduce the number of channels kf i (but preserving the spatial dimensions) of these features through a 3 3 olutional module (plus ReLU), generating skip features S i, with ks i kf i channels. This substantially reduces computational requirements, moreover, it allows the network to transform F i into a form S i more suitable for use in refinement. An important but subtle point is that during full image inference, as with the features F i, skip features are shared by overlapping image patches, making them highly efficient to compute. In contrast, the remaining computations of R i are patch dependent as they depend on the local mask M i and hence cannot be shared across locations. The refinement module concatenates mask encoding M i with skip features S i resulting in a feature map with km i + ks i channels, and applies another 3 3 olution (plus ReLU) to the result. Finally, the output is upsampled using bilinear upsampling by a factor of 2, resulting in a new mask encoding M i+1 with km i+1 channels (km i+1 is determined by the number of 3 3 kernels used
7 Learning to Refine Object Segments 7 for the olution). As with the olution for generating the skip features, this transformation is used to simultaneously learn a nonlinear mask encoding from the concatenated features and to control the capacity of the model. Please see Figure 1d for a complete overview of the refinement module R. Further optimizations to R are possible, for details see Figure 7. Note that the refinement module uses only olution, ReLU, bilinear upsampling, and concatenation, hence it is fully backpropable and highly efficient. In 5.2, we analyze different architecture choices for the refinement module in terms of performance and speed. As a general design principle, we aim to keep k i s and k i m large enough to capture rich information but small enough to keep computation low. In particular, we can start with a fairly large number of channels but as spatial resolution is increased the number of channels should decrease. This reverses the typical design of feedforward networks where spatial resolution decreases while the number of channels increases with increasing depth. 3.3 Training and Inference We train SharpMask with an identical data definition and loss function as the original DeepMask model. Each training sample is a triplet containing an input patch, a label specifying if the input patch contains a centered object at the correct scale, and for positive samples a binary object mask. The network trunk parameters are initialized with a network that was pre-trained on ImageNet [11]. All the other layers are initialized randomly from a uniform distribution. Training proceeds in two stages: first, the model is trained to jointly infer a coarse pixel-wise segmentation mask and an object score, second, the feedforward path is frozen and the refinement modules trained. The first training stage is identical to [22]. Once learning of the first stage erges, the final mask prediction layer of the feedforward network is removed and replaced with a linear layer that generates a mask encoding M 1 in place of the actual mask output. We then add the refinement modules to the network and train using standard stochastic gradient descent, backpropagating the error only on the horizontal and vertical olution layers on each of the n refinement modules. This two-stage training procedure was selected for three reasons. First, we found it led to faster ergence. Second, at inference time, a single network trained in this manner can be used to generate either a coarse mask using the forward path only or a sharp mask using our bottom-up/top-down approach. Third, we found the gains of fine-tuning through the entire network to be minimal once the forward branch had erged. During full-image inference, similarly to [22], most computation for neighboring windows is shared through use of olution, including for skip layers S i. However, as discussed, the refinement modules receive a unique input M 1 at each spatial location, hence, computation proceeds independently at each location for this stage. Rather than refine every proposal, we simply refine only the most promising locations. Specifically, we select the top N scoring proposal windows and apply the refinement in a batch mode to these top N locations. To further clarify all implementation details, full source code will be released.
8 8 Pinheiro, Lin, Collobert, Dollár 4 Feedforward Architecture While the focus of our work is on top-down mask refinement, to obtain a better understanding of object segmentation we also explore factors that effect a feedforward network s ability to generate accurate object masks. In the next two subsections we carefully examine the design of the network trunk and head. 4.1 Trunk Architecture We begin by identifying model bottlenecks. DeepMask spends 40% of its time for feature extraction, 40% for mask prediction, and 20% for score prediction. Given the time of feature extraction, increasing model depth or breadth can incur a non-trivial computational cost. Simply upgrading the 11-layer VGG-A model [26] used in [22] to the 16-layer VGG-D model can double run time. Recently He et al. [28] introduced Residual Networks (ResNet) and showed excellent results. In this work, we use the 50-layer ResNet model pre-trained on ImageNet, which achieves the accuracy of VGG-D but with the inference time of VGG-A. We explore models with varying input size W, number of pooling layers P, stride density S, model depth D, and final number of features channels F. These factors are intertwined but we can achieve significant insight by a targeted study. Input size W: Given a minimum object size O, the input image needs to be upsampled by W/O to detect small objects. Hence, reducing W improves speed of both mask prediction and inference for small objects. However, smaller W reduces the input resolution which in turn lowers the accuracy of mask prediction. Moreover, reducing W decreases stride density S which further harms accuracy. Pooling layers P: Assuming 2 2 pooling, the final kernel width is W/2 P. During inference, this necessitates olving with a large W/2 P kernel in order to aggregate information (e.g., for DeepMask). However, while more pooling P results in faster computation, it also results in loss of feature resolution. Stride density S: We define the stride density to be S=W/stride (where typically stride is 2 P ). The smaller the stride, the denser the overlap with ground truth locations. We found that the stride density is key for mask prediction. Doubling the stride while keeping W constant greatly reduces performance as the model must be more spatially invariant relative to a fixed object size. Depth D: For typical networks [25 28], spatial resolution decreases with increasing D while the number of features channels F increases. In the context of instance segmentation, reducing spatial resolution hurts performance. One possible direction is to start with lower layers that have less pooling and increase the depth of the model without reducing spatial resolution or increasing F. This would require training networks from scratch which we leave to future work. Feature channels F: The high dimensional features at the top layer introduce a bottleneck for feature aggregation. An efficient approach is to first apply dimensionality reduction before feature aggregation. We adopt 1 1 olution to reduce F and show that we can achieve large speedups in this manner. In 5.1 and Table 1 we examine various choices for W, P, S, D, and F.
9 Learning to Refine Object Segments 9 1x1 score 1x1 score 1x1 score 1x1 score 1024x1x1 1024x1x1 1024x1x1 1024x1x1 512x1x1 512x1x1 512x1x1 512x1x1 512x1x1 512x1x1 512x 14x14 512x 7x7 128x 10x10 128x 10x10 128x 10x10 512x1x1 128x 10x10 1x1 2x2 pool 1x1 1x1 1x1 1x1 (a) original (b) head A (c) head B (d) head C Fig. 3: Network head architecture. (a) The original DeepMask head. (b-d) Various head options with increasing simplicity and speed. The heads share identical pathways for mask prediction but have progressively simplified score branches. 4.2 Head Architecture We also examine the head of the DeepMask model, focusing on score prediction. Our goal is to simplify the head and further improve inference speed. In DeepMask, the mask and scoring heads branch after the final feature map (see Figure 3a). Both mask and score prediction require a large olution, and in addition, the score branch requires an extra pooling step and hence interleaving to match the stride of the mask network during inference. Overall, this leads to a fairly inelegant and slow inference procedure. We propose a sequence of simplified network structures that have identical mask branches but that share progressively more computation. A series of model heads A-C is detailed in Figure 3. Head A removes the need for interleaving in DeepMask by removing max pooling and replacing the olutions by olutions; overall this network is much faster. Head B simplifies this by having the features shared by both the mask and score branch. Finally, model C further reduces computation by having the score prediction utilize the same low rank features used for the mask. In 5.1 we evaluate these variants in terms of performance and speed. 5 Experiments We train our model on the training set of the COCO dataset [9], which contains 80k training images and 500k instance annotations. For most of our experiments, results are reported on the first 5k COCO validation images. Mask accuracy is measured by Intersection over Union (IoU) which is the ratio of the intersection of the predicted mask and ground truth annotation to their union. A common method for summarizing object proposal accuracy is using the average recall (AR) between IoU 0.5 and.95 for a fixed number of proposals. Hosang et al. [38] show that AR correlates well with object detector performance. Our results are measured in terms of AR at 10, 100, and 1000 proposals and averaged across all counts (AUC). As the COCO dataset contains objects in a




, medium (32 2 a 96")







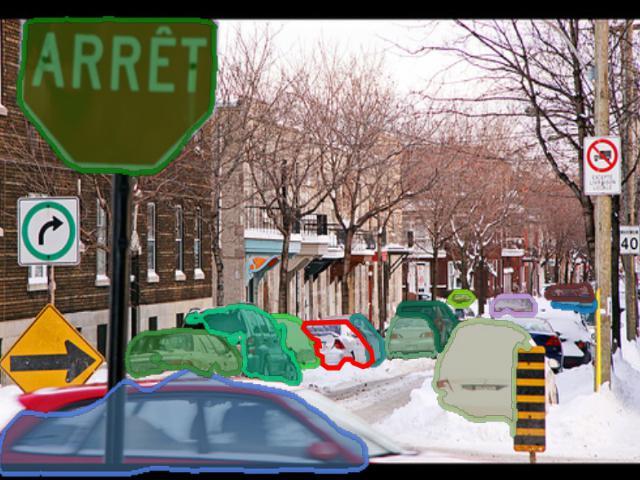
10 10 Pinheiro, Lin, Collobert, Dollár Fig. 4: SharpMask proposals with highest IoU to the ground truth on selected COCO images. Missed objects (no matching proposals with IoU > 0.5) are marked in red. The last row shows a number of failure cases. wide range of scales, it is also common practice to divide objects into roughly equally sized sets according to object pixel area a: small (a < 32 2 ), medium (32 2 a 96 2 ), and large (a > 96 2 ) objects, and report accuracy at each scale. We use a different subset of the COCO validation set to decide architecture choices and hyper-parameter selection. We use a learning rate of 1e-3 for training the refinement stage, which takes about 2 days to train on an Nvidia Tesla K40m GPU. To mitigate the mismatch of per-patch training with olutional inference, we found that training deeper model such as ResNet requires adding extra image content (32 pixels) surrounding the training patches and using reflectivepadding instead of 0-padding at every olutional layer. Finally, following [22], we binarize our continuous mask prediction using a threshold of 0.2.
11 Learning to Refine Object Segments 11 W P D S kernel F AR AR S AR M AR L time DeepMask x14x s W160-P4-D8-VGG x10x s W160-P4-D x10x s W160-P4-D39-F x10x s W112-P4-D x7x s W112-P3-D x14x s W112-P3-D21-F x14x s SharpMask x10x s Table 1: Model performance (upper bound on AR) for varying input size W, number of pooling layers P, stride density S, depth D, and features channels F. See 4.1 and 5.1 for details. Timing is for multiscale inference excluding the time for score prediction. Total time for DeepMask & SharpMask is 1.59s &.76s. 5.1 Architecture Optimization We begin by reporting our optimizations of the feedforward model. For our initial results, we measure AR for densely computed masks ( 10 4 proposals per image). This allows us to factor out the effect of objectness score prediction and focus exclusively on evaluating mask quality. In our experiments, AR across all proposals is highly correlated (see Figure 6), hence this upper bound on AR is predictive of performance at more realistic settings (e.g. at AR 100 ). Trunk Architecture: We begin by investigating effect of the network trunk parameters described in 4.1 with the goal of optimizing both speed and accuracy. Performance of a number of representative models is shown in Table 1. First, replacing the DeepMask VGG-A model with a version is much faster (over 2 ). Surprisingly, accuracy loss for this model, W160-P4-D8- VGG, is only minor, partially due to an improved learning schedule. Upgrading to a ResNet trunk, W160-P4-D39, restores accuracy and keeps speed identical. We found that reducing the feature dimension to 128 (-F128) shows almost no loss, but improves speed. Finally, as input size is a bottleneck, we also tested a number of W112 models. Nevertheless, overall, W160-P4-D39-F128 gave the best tradeoff between speed and accuracy. Head Architecture: In Table 2 we evaluate the performance of the various network heads in Figure 3 (using standard AR, not upper-bound AR as in Table 1). Head A is already substantially faster than DeepMask. All heads achieve similar accuracy with a decreasing inference time as the score branch shares progressively more computation with the mask. Interestingly, head C is able to predict both the score and mask from a single compact 512 dimensional vector. We chose this variant due to its simplicity and speed. DeepMask-ours: Based on all of these observations, we combine the W160- P4-D39-F128 trunk with the C head. We refer to the resulting architecture as DeepMask-ours. DeepMask-ours is over 3 faster than the original DeepMask (.46s per image versus 1.59s) and also more accurate. Moreover, model parameter count is reduced from 75M to 17M. For all SharpMask experiments, we adopt DeepMask-ours as the base feedforward architecture.
12 12 Pinheiro, Lin, Collobert, Dollár AR 10 AR 100 AR 1K AUC S AUC M AUC L AUC mask score total DeepMask s.27s 1.59s head A s.06s.51s head B s.05s.50s head C s.01s.46s Table 2: All model variants of the head have similar performance. Head C is a win in terms of both simplicity and speed. See Figure 3 for head definitions. (a) k i m = k i s = k (b) k i m = k i s = k 2 i 1 (c) detection perf. Fig. 5: (a-b) Performance and inference time for multiple SharpMask variants. (c) Fast R-CNN detection performance versus number and type of proposals. 5.2 SharpMask Analysis We now analyze different parameter settings for our top-down refinement network. As described in 3, each of the four refinement modules R i in SharpMask is controlled by two parameters km i and ks, i which denote the size of the mask encoding M i and skip encoding S i, respectively. These parameters control network capacity and effect inference speed. We experiment with two different schedules for these parameters: (a) km i = ks i = k and (b) km i = ks i = k 2 for each i 4. i 1 Figure 5(a-b) shows performance for the two schedules for different k both in terms of AUC and inference time (measured when refining the top 500 proposals per image, at which point object detection performance saturates, see Figure 5c). We consistently observe higher performance as we increase the capacity, with no sign of overfitting. Parameter schedule b, in particular with k = 32, has the best trade-off between performance and speed, so we chose this as our final model. We note that we were unable to obtain good results with schedule a for k 2, indicating the importance of using sufficiently large k. Also, we observed that a single 3 3 olution encounters learning difficulties when (ks i kf i ). Therefore, in all experiments we used a sequence of two 3 3 olutions (followed by ReLUs) to generate S i from F i, reducing F i to 64 channels first followed by a further reduction to ks i channels. Finally, we performed two additional ablation studies. First, we removed all downward s, set km i = ks i = 1, and averaged the output of all layers. Second, we kept the vertical s but removed all horizontal s. These two variants are related to skip and de networks, respectively. Neither setup showed meaningful improvement over the baseline feedforward network. In short, we found that both horizontal and vertical connections were necessary for this task.
13 Learning to Refine Object Segments 13 Box Proposals Segmentation Proposals AR 10 AR 100 AR 1K AUC AR 10 AR 100 AR 1K AUC S AUC M AUC L AUC EdgeBoxes [34] Geodesic [36] Rigor [37] SelectiveSearch [33] MCG [35] RPN [7, 8] DeepMask [22] DeepMaskZoom [22] DeepMask-ours SharpMask SharpMaskZoom SharpMaskZoom Table 3: Results on the COCO validation set on box and segmentation proposals. AR at different proposals counts is reported and also AUC (AR averaged across all proposal counts). For segmentation proposals, we also report AUC at multiple scales. SharpMask has largest for segmentation proposals and large objects. 5.3 Comparison with State of the Art Table 3 compares the performance of our model, SharpMask, to other existing methods on the COCO dataset. We compare results both on box and segmentation proposals (for box proposals we extract tight bounding boxes surrounding our segmentation masks). SharpMask achieves the state of the art in all metrics for both speed and accuracy by a large margin. Additionally, because Sharp- Mask has a smaller input size, it can be applied to an additional one to two scales (SharpMaskZoom) and achieves a large boost in AR for small objects. Our feedforward architecture improvements, DeepMask-ours, alone, improve over the original DeepMask, in particular for bounding box proposals. Not only is the new baseline more accurate, with our architecture optimization to the trunk and head of the network (see 4), speed is improved to.46s per image. We emphasize that DeepMask was the previous state-of-the-art on this task, outperforming all bottom-up proposal methods as well as Region Proposal Networks (RPN) [7] (we obtained improved RPN proposals from the authors of [8]). We train SharpMask using DeepMask-ours as the feedforward network. As the two networks have an identical score branch, we can disentangle the performance improvements achieved by our top-down refinement approach. Once again, we observe a considerable boost in performance on AR due to the topdown refinement. We note that improvement for segmentation predictions is bigger than box predictions, which is not surprising, as sharpening masks might not change the tight box around the objects in many examples. Inference for SharpMask is.76s per image, over 2 faster than DeepMask; moreover, the refinement modules require fewer than 3M additional parameters. In Figures 2 and 9 we show direct comparison between SharpMask and Deep- Mask and we can see SharpMask generates higher-fidelity masks that more accurately delineate object boundaries. In Figures 4 and 8, we show more qualitative results. Additional detailed performance plots are shown in Figure 6.
14 14 Pinheiro, Lin, Collobert, Dollár AP AP 50 AP 75 AP S AP M AP L AR 1 AR 10 AR 100 AR S AR M AR L SelSearch + VGG [6] RPN + VGG [7] SharpMask + VGG ResNet++ [28] SharpMask+MPN [41] ResNet++ [28] SharpMask+MPN [41] ION [8] Table 4: Top: COCO bounding box results of various baselines without bells and whistles, trained on the train set only, and reported on test-dev (results for [6, 7] obtained from original papers). We denote methods using proposal+classifier notation for clarity. SharpMask achieves top results, outperforming both RPN and SelSearch proposals. Middle: Winners of the 2015 COCO segmentation challenge. Bottom: Winners of the 2015 COCO bounding box challenge. 5.4 Object Detection In this section, we use SharpMask in the Fast R-CNN pipeline [6] and analyze the improvements of using our proposals for object detection. In the following experiments we coupled SharpMask proposals with two classifiers: VGG [26] and MultiPathNet (MPN) [41], which introduces a number of improvements to the VGG classifier. In future work we will also test our proposals with ResNets [28]. First, Fig. 5c shows the comparison of bounding box detection results for SharpMask and SelSearch [33] on the COCO val set with the MPN classifier applied to both. SharpMask achieves 28 AP, which is 5 AP higher than SelSearch. Also, performance erges using only 500 SharpMask proposals per image. Next, Table 4 top shows results of various baselines without bells and whistles, trained on the train set only. SharpMask achieves top results with the VGG classifier, outperforming both RPN [7] and SelSearch [33]. Finally, Table 4 middle/bottom shows results from the 2015 COCO detection challenges. The performance is reported with model ensembling and the MPN classifier. The ensemble model achieve 33.5 AP for boxes and 25.1 AP for segments, and achieved second place in the challenges. Note that for the challenges, both SharpMask and MPN used the VGG trunk (ResNets were concurrent work, and won the competitions). We have not re-run our model with ensembling and additional bells and whistles after integrating ResNets into SharpMask. 6 Conclusion In this paper, we introduce a novel architecture for object instance segmentation, based on an augmentation of feedforward networks with top-down refinement modules. Our model achieves a new state of the art for object proposals generation, both in terms of performance and speed. The proposed refinement approach is general and could be applied to other pixel-labeling tasks.
15 Learning to Refine Object Segments 15 average recall SharpMask SharpMaskZoom DeepMask MCG SelectiveSearch Rigor Geodesic EdgeBoxes RPN average recall SharpMask SharpMaskZoom DeepMask MCG SelectiveSearch Rigor Geodesic # proposals (a) Bounding box proposals # proposals (b) Segmentation proposals average recall SharpMask SharpMaskZoom DeepMask MCG SelectiveSearch Rigor Geodesic average recall SharpMask SharpMaskZoom DeepMask MCG SelectiveSearch Rigor Geodesic average recall SharpMask SharpMaskZoom DeepMask MCG SelectiveSearch Rigor Geodesic # proposals (c) Small objects (a < 32 2 ) # proposals (d) Medium objects # proposals (e) Large objects (a > 96 2 ) recall SharpMask SharpMaskZoom DeepMask MCG SelectiveSearch Rigor Geodesic recall SharpMask SharpMaskZoom DeepMask MCG SelectiveSearch Rigor Geodesic recall SharpMask SharpMaskZoom DeepMask MCG SelectiveSearch Rigor Geodesic IoU (f) proposals IoU (g) proposals IoU (h) proposals Fig. 6: (a-b) Average recall versus number of box and segment proposals on COCO. (c-e) AR versus number of proposals for different object scales on segment proposals. (f-h) Recall versus IoU threshold for different number of segment proposals. M i M i F i 3x3 M i S i 3x3 (a) original F i 3x3 S i 3x3 S i M * * i + 3x3 (b) refactored 2x up 2x up M i+1 M i+1 Fig. 7: (a) Original refinement model. (b) Refactored but equivalent model that leads to a more efficient implementation. The models are equivalent as concatenating along depth and olving along the spatial dimensions can be rewritten as two separate spatial olutions followed by addition. The green boxes denote the corresponding olutions (note also the placement of the ReLUs). The refactored model is more efficient as skip features (both S i and S i ) are shared by overlapping refinement windows (while M i and M i are not). Finally, observe that setting k i m = 1, i, and removing the top-down olution would transform our refactored model into a standard skip architecture (however, using k i m = 1 is not effective in our setting).














16 16 Pinheiro, Lin, Collobert, Dollár Fig. 8: More selected qualitative results (see also Figure 4).
 2. Sermanet, P., Eigen, D., Zhang, X., Mathieu, M., Fergus, R., LeCun, Y.")
 4. He, K., Zhang, X., Ren, S., Sun, J.: Spatial pyramid pooling in deep olutional networks for visual recognition. In: ECCV. (2014) 5. Girshick, R., Donahue, J., Darrell, T., Malik, J.")
 8. Bell, S., Zitnick, C.L., Bala, K., Girshick, R.")
 10. Everingham, M., Gool, L.V., Williams, C.K.I., Winn, J., Zisserman, A.")
17 Learning to Refine Object Segments 17 (a) DeepMask Output (b) SharpMask Output Fig. 9: More selected qualitative comparisons (see also Figure 2). References 1. Felzenszwalb, P.F., Girshick, R.B., McAllester, D., Ramanan, D.: Object detection with discriminatively trained part-based models. PAMI (2010) 2. Sermanet, P., Eigen, D., Zhang, X., Mathieu, M., Fergus, R., LeCun, Y.: Overfeat: Integrated recognition, localization and detection using nets. In: ICLR. (2014) 3. Szegedy, C., Reed, S., Erhan, D., Anguelov, D.: Scalable, high-quality object detection. arxiv: (2014) 4. He, K., Zhang, X., Ren, S., Sun, J.: Spatial pyramid pooling in deep olutional networks for visual recognition. In: ECCV. (2014) 5. Girshick, R., Donahue, J., Darrell, T., Malik, J.: Rich feature hierarchies for accurate object detection and semantic segmentation. In: CVPR. (2014) 6. Girshick, R.: Fast R-CNN. In: ICCV. (2015) 7. Ren, S., He, K., Girshick, R., Sun, J.: Faster R-CNN: Towards real-time object detection with region proposal networks. In: NIPS. (2015) 8. Bell, S., Zitnick, C.L., Bala, K., Girshick, R.: Inside-outside net: Detecting objects in context with skip pooling and recurrent neural nets. In: CVPR. (2016) 9. Lin, T.Y., Maire, M., Belongie, S., Bourdev, L., Girshick, R., Hays, J., Perona, P., Ramanan, D., Zitnick, C.L., Dollár, P.: Microsoft COCO: Common objects in context. arxiv: (2015) 10. Everingham, M., Gool, L.V., Williams, C.K.I., Winn, J., Zisserman, A.: The PAS- CAL visual object classes (VOC) challenge. IJCV (2010) 11. Deng, J., Dong, W., Socher, R., Li, L., Li, K., Fei-Fei, L.: Imagenet: A large-scale hierarchical image database. In: CVPR. (2009) 12. Shotton, J., Johnson, M., Cipolla, R.: Semantic texton forests for image categorization and segmentation. In: CVPR. (2008) 13. Farabet, C., Couprie, C., Najman, L., LeCun, Y.: Learning hierarchical features for scene labeling. PAMI (2013) 14. Pinheiro, P.O., Collobert, R.: Recurrent. neural networks for scene labeling. In: ICML. (2014) 15. Eigen, D., Fergus, R.: Predicting depth, surface normals and semantic labels with a common multi-scale olutional architecture. In: ICCV. (2015)
18 18 Pinheiro, Lin, Collobert, Dollár 16. Zheng, S., Jayasumana, S., Romera-Paredes, B., Vineet, B., Su, Z., Du, D., Huang, C., Torr, P.: Conditional random fields as recurrent neural nets. In: ICCV. (2015) 17. Chen, L., Papandreou, G., Kokkinos, I., Murphy, K., Yuille, A.L.: Semantic image segmentation with deep. nets and fully connected CRFs. In: ICLR. (2015) 18. Schwing, A.G., Urtasun, R.: Fully connected deep structured networks. arxiv: (2015) 19. Noh, H., Hong, S., Han, B.: Learning deolution network for semantic segmentation. In: ICCV. (2015) 20. LeCun, Y., Bottou, L., Bengio, Y., Haffner, P.: Gradient-based learning applied to document recognition. Proceedings of the IEEE (1998) 21. Hariharan, B., Arbeláez, P., Girshick, R., Malik, J.: Simultaneous detection and segmentation. In: ECCV. (2014) 22. Pinheiro, P.O., Collobert, R., Dollár, P.: Learning to segment object candidates. In: NIPS. (2015) 23. Dai, J., He, K., Sun, J.: Instance-aware semantic segmentation via multi-task network cascades. In: CVPR. (2016) 24. Hariharan, B., Arbeláez, P., Girshick, R., Malik, J.: Hypercolumns for object segmentation and fine-grained localization. In: CVPR. (2015) 25. Krizhevsky, A., Sutskever, I., Hinton, G.: Imagenet classification with deep olutional neural networks. In: NIPS. (2012) 26. Simonyan, K., Zisserman, A.: Very deep olutional networks for large-scale image recognition. In: ICLR. (2015) 27. Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S., Anguelov, D., Erhan, D., Vanhoucke, V., Rabinovich, A.: Going deeper with olutions. In: CVPR. (2015) 28. He, K., Zhang, X., Ren, S., Sun, J.: Deep residual learning for image recognition. In: CVPR. (2016) 29. Long, J., Shelhamer, E., Darrell, T.: Fully olutional networks for semantic segmentation. In: CVPR. (2015) 30. Xie, S., Tu, Z.: Holistically-nested edge detection. In: ICCV. (2015) 31. Sermanet, P., Kavukcuoglu, K., Chintala, S., LeCun, Y.: Pedestrian detection with unsupervised multi-stage feature learning. In: CVPR. (2013) 32. Alexe, B., Deselaers, T., Ferrari, V.: Measuring the objectness of image windows. PAMI (2012) 33. Uijlings, J., van de Sande, K., Gevers, T., Smeulders, A.: Selective search for object recog. IJCV (2013) 34. Zitnick, C.L., Dollár, P.: Edge boxes: Locating object proposals from edges. In: ECCV. (2014) 35. Pont-Tuset, J., Arbeláez, P., Barron, J., Marques, F., Malik, J.: Multiscale combinatorial grouping for image segmentation and object proposal gen. PAMI (2015) 36. Krähenbühl, P., Koltun, V.: Geodesic object proposals. In: ECCV. (2014) 37. Humayun, A., Li, F., Rehg, J.M.: RIGOR: Reusing Inference in Graph Cuts for generating Object Regions. In: CVPR. (2014) 38. Hosang, J., Benenson, R., Dollár, P., Schiele, B.: What makes for effective detection proposals? PAMI (2015) 39. Dosovitskiy, A., Fischer, P., Ilg, E., Hausser, P., Hazirbas, C., Golkov, V., v.d. Smagt, P., Cremers, D., Brox, T.: Flownet: Learning optical flow with olutional networks. In: ICCV. (2015) 40. Zeiler, M.D., Krishnan, D., Taylor, G.W., Fergus, R.: Deolutional networks. In: CVPR. (2010) 41. Zagoruyko, S., Lerer, A., Lin, T.Y., Pinheiro, P.O., Gross, S., Chintala, S., Dollár, P.: A multipath network for object detection. In: BMVC. (2016)
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Learning to Segment Object Candidates
 Learning to Segment Object Candidates Pedro O. Pinheiro Ronan Collobert Piotr Dollár pedro@opinheiro.com locronan@fb.com pdollar@fb.com Facebook AI Research Abstract Recent object detection systems rely
Learning to Segment Object Candidates Pedro O. Pinheiro Ronan Collobert Piotr Dollár pedro@opinheiro.com locronan@fb.com pdollar@fb.com Facebook AI Research Abstract Recent object detection systems rely
A MultiPath Network for Object Detection
 ZAGORUYKO et al.: A MULTIPATH NETWORK FOR OBJECT DETECTION 1 A MultiPath Network for Object Detection Sergey Zagoruyko, Adam Lerer, Tsung-Yi Lin, Pedro O. Pinheiro, Sam Gross, Soumith Chintala, Piotr Dollár
ZAGORUYKO et al.: A MULTIPATH NETWORK FOR OBJECT DETECTION 1 A MultiPath Network for Object Detection Sergey Zagoruyko, Adam Lerer, Tsung-Yi Lin, Pedro O. Pinheiro, Sam Gross, Soumith Chintala, Piotr Dollár
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
arxiv: v2 [cs.cv] 18 Jul 2017
![arxiv: v2 [cs.cv] 18 Jul 2017](/thumbs/72/67294650.jpg "arxiv: v2 [cs.cv] 18 Jul 2017") PHAM, ITO, KOZAKAYA: BISEG 1 arxiv:1706.02135v2 [cs.cv] 18 Jul 2017 BiSeg: Simultaneous Instance Segmentation and Semantic Segmentation with Fully Convolutional Networks Viet-Quoc Pham quocviet.pham@toshiba.co.jp
PHAM, ITO, KOZAKAYA: BISEG 1 arxiv:1706.02135v2 [cs.cv] 18 Jul 2017 BiSeg: Simultaneous Instance Segmentation and Semantic Segmentation with Fully Convolutional Networks Viet-Quoc Pham quocviet.pham@toshiba.co.jp
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Learning to Segment Object Candidates
 Learning to Segment Object Candidates Pedro Pinheiro, Ronan Collobert and Piotr Dollar Presented by - Sivaraman, Kalpathy Sitaraman, M.S. in Computer Science, University of Virginia Facebook Artificial
Learning to Segment Object Candidates Pedro Pinheiro, Ronan Collobert and Piotr Dollar Presented by - Sivaraman, Kalpathy Sitaraman, M.S. in Computer Science, University of Virginia Facebook Artificial
arxiv: v4 [cs.cv] 6 Jul 2016
![arxiv: v4 [cs.cv] 6 Jul 2016](/thumbs/93/112985717.jpg "arxiv: v4 [cs.cv] 6 Jul 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu, C.-C. Jay Kuo (qinhuang@usc.edu) arxiv:1603.09742v4 [cs.cv] 6 Jul 2016 Abstract. Semantic segmentation
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu, C.-C. Jay Kuo (qinhuang@usc.edu) arxiv:1603.09742v4 [cs.cv] 6 Jul 2016 Abstract. Semantic segmentation
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
arxiv: v2 [cs.cv] 10 Apr 2017
![arxiv: v2 [cs.cv] 10 Apr 2017](/thumbs/80/82485703.jpg "arxiv: v2 [cs.cv] 10 Apr 2017") Fully Convolutional Instance-aware Semantic Segmentation Yi Li 1,2 Haozhi Qi 2 Jifeng Dai 2 Xiangyang Ji 1 Yichen Wei 2 1 Tsinghua University 2 Microsoft Research Asia {liyi14,xyji}@tsinghua.edu.cn, {v-haoq,jifdai,yichenw}@microsoft.com
Fully Convolutional Instance-aware Semantic Segmentation Yi Li 1,2 Haozhi Qi 2 Jifeng Dai 2 Xiangyang Ji 1 Yichen Wei 2 1 Tsinghua University 2 Microsoft Research Asia {liyi14,xyji}@tsinghua.edu.cn, {v-haoq,jifdai,yichenw}@microsoft.com
arxiv: v1 [cs.cv] 5 Oct 2015
![arxiv: v1 [cs.cv] 5 Oct 2015](/thumbs/71/66021937.jpg "arxiv: v1 [cs.cv] 5 Oct 2015") Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
arxiv: v1 [cs.cv] 15 Oct 2018
![arxiv: v1 [cs.cv] 15 Oct 2018](/thumbs/89/99052786.jpg "arxiv: v1 [cs.cv] 15 Oct 2018") Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
arxiv: v1 [cs.cv] 24 May 2016
![arxiv: v1 [cs.cv] 24 May 2016](/thumbs/80/80473828.jpg "arxiv: v1 [cs.cv] 24 May 2016") Dense CNN Learning with Equivalent Mappings arxiv:1605.07251v1 [cs.cv] 24 May 2016 Jianxin Wu Chen-Wei Xie Jian-Hao Luo National Key Laboratory for Novel Software Technology, Nanjing University 163 Xianlin
Dense CNN Learning with Equivalent Mappings arxiv:1605.07251v1 [cs.cv] 24 May 2016 Jianxin Wu Chen-Wei Xie Jian-Hao Luo National Key Laboratory for Novel Software Technology, Nanjing University 163 Xianlin
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
Deconvolutions in Convolutional Neural Networks
 Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
DeepBox: Learning Objectness with Convolutional Networks
 DeepBox: Learning Objectness with Convolutional Networks Weicheng Kuo Bharath Hariharan Jitendra Malik University of California, Berkeley {wckuo, bharath2, malik}@eecs.berkeley.edu Abstract Existing object
DeepBox: Learning Objectness with Convolutional Networks Weicheng Kuo Bharath Hariharan Jitendra Malik University of California, Berkeley {wckuo, bharath2, malik}@eecs.berkeley.edu Abstract Existing object
HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION
 HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION Chien-Yao Wang, Jyun-Hong Li, Seksan Mathulaprangsan, Chin-Chin Chiang, and Jia-Ching Wang Department of Computer Science and Information
HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION Chien-Yao Wang, Jyun-Hong Li, Seksan Mathulaprangsan, Chin-Chin Chiang, and Jia-Ching Wang Department of Computer Science and Information
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Gated Bi-directional CNN for Object Detection
 Gated Bi-directional CNN for Object Detection Xingyu Zeng,, Wanli Ouyang, Bin Yang, Junjie Yan, Xiaogang Wang The Chinese University of Hong Kong, Sensetime Group Limited {xyzeng,wlouyang}@ee.cuhk.edu.hk,
Gated Bi-directional CNN for Object Detection Xingyu Zeng,, Wanli Ouyang, Bin Yang, Junjie Yan, Xiaogang Wang The Chinese University of Hong Kong, Sensetime Group Limited {xyzeng,wlouyang}@ee.cuhk.edu.hk,
Instance-aware Semantic Segmentation via Multi-task Network Cascades
 Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai, Kaiming He, Jian Sun Microsoft research 2016 Yotam Gil Amit Nativ Agenda Introduction Highlights Implementation Further
Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai, Kaiming He, Jian Sun Microsoft research 2016 Yotam Gil Amit Nativ Agenda Introduction Highlights Implementation Further
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Convolutional Neural Networks. Computer Vision Jia-Bin Huang, Virginia Tech
 Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
BoxSup: Exploiting Bounding Boxes to Supervise Convolutional Networks for Semantic Segmentation
 BoxSup: Exploiting Bounding Boxes to Supervise Convolutional Networks for Semantic Segmentation Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com Abstract Recent leading
BoxSup: Exploiting Bounding Boxes to Supervise Convolutional Networks for Semantic Segmentation Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com Abstract Recent leading
Boundary-aware Instance Segmentation
 Boundary-aware Instance Segmentation Zeeshan Hayder,2, Xuming He 2, Australian National University & 2 Data6/CSIRO Mathieu Salzmann 3 3 CVLab, EPFL, Switzerland Abstract We address the problem of instance-level
Boundary-aware Instance Segmentation Zeeshan Hayder,2, Xuming He 2, Australian National University & 2 Data6/CSIRO Mathieu Salzmann 3 3 CVLab, EPFL, Switzerland Abstract We address the problem of instance-level
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
arxiv: v1 [cs.cv] 14 Dec 2015
![arxiv: v1 [cs.cv] 14 Dec 2015](/thumbs/72/67245194.jpg "arxiv: v1 [cs.cv] 14 Dec 2015") Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com arxiv:1512.04412v1 [cs.cv] 14 Dec 2015 Abstract
Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com arxiv:1512.04412v1 [cs.cv] 14 Dec 2015 Abstract
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
arxiv: v1 [cs.cv] 26 Jun 2017
![arxiv: v1 [cs.cv] 26 Jun 2017](/thumbs/80/82184026.jpg "arxiv: v1 [cs.cv] 26 Jun 2017") Detecting Small Signs from Large Images arxiv:1706.08574v1 [cs.cv] 26 Jun 2017 Zibo Meng, Xiaochuan Fan, Xin Chen, Min Chen and Yan Tong Computer Science and Engineering University of South Carolina, Columbia,
Detecting Small Signs from Large Images arxiv:1706.08574v1 [cs.cv] 26 Jun 2017 Zibo Meng, Xiaochuan Fan, Xin Chen, Min Chen and Yan Tong Computer Science and Engineering University of South Carolina, Columbia,
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
RSRN: Rich Side-output Residual Network for Medial Axis Detection
 RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
DeepProposals: Hunting Objects and Actions by Cascading Deep Convolutional Layers
 DOI.7/s263-7-6-x DeepProposals: Hunting Objects and Actions by Cascading Deep Convolutional Layers Amir Ghodrati Ali Diba 2 Marco Pedersoli 3 Tinne Tuytelaars 2 Luc Van Gool 2 Received: 3 May 26 / Accepted:
DOI.7/s263-7-6-x DeepProposals: Hunting Objects and Actions by Cascading Deep Convolutional Layers Amir Ghodrati Ali Diba 2 Marco Pedersoli 3 Tinne Tuytelaars 2 Luc Van Gool 2 Received: 3 May 26 / Accepted:
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Computer Vision Lecture 16
 Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
arxiv: v1 [cs.cv] 29 Sep 2016
![arxiv: v1 [cs.cv] 29 Sep 2016](/thumbs/76/73787064.jpg "arxiv: v1 [cs.cv] 29 Sep 2016") arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs
 DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
Encoder-Decoder Networks for Semantic Segmentation. Sachin Mehta
 Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Dense Image Labeling Using Deep Convolutional Neural Networks
 Dense Image Labeling Using Deep Convolutional Neural Networks Md Amirul Islam, Neil Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, MB {amirul, bruce, ywang}@cs.umanitoba.ca
Dense Image Labeling Using Deep Convolutional Neural Networks Md Amirul Islam, Neil Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, MB {amirul, bruce, ywang}@cs.umanitoba.ca
arxiv: v1 [cs.cv] 1 Feb 2018
![arxiv: v1 [cs.cv] 1 Feb 2018](/thumbs/89/100586364.jpg "arxiv: v1 [cs.cv] 1 Feb 2018") Learning Semantic Segmentation with Diverse Supervision Linwei Ye University of Manitoba yel3@cs.umanitoba.ca Zhi Liu Shanghai University liuzhi@staff.shu.edu.cn Yang Wang University of Manitoba ywang@cs.umanitoba.ca
Learning Semantic Segmentation with Diverse Supervision Linwei Ye University of Manitoba yel3@cs.umanitoba.ca Zhi Liu Shanghai University liuzhi@staff.shu.edu.cn Yang Wang University of Manitoba ywang@cs.umanitoba.ca
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Fully Convolutional Networks for Semantic Segmentation
 Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors
![[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors](/thumbs/89/97941029.jpg "[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors") [Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
arxiv: v3 [cs.cv] 18 Oct 2017
![arxiv: v3 [cs.cv] 18 Oct 2017](/thumbs/75/72627087.jpg "arxiv: v3 [cs.cv] 18 Oct 2017") SSH: Single Stage Headless Face Detector Mahyar Najibi* Pouya Samangouei* Rama Chellappa University of Maryland arxiv:78.3979v3 [cs.cv] 8 Oct 27 najibi@cs.umd.edu Larry S. Davis {pouya,rama,lsd}@umiacs.umd.edu
SSH: Single Stage Headless Face Detector Mahyar Najibi* Pouya Samangouei* Rama Chellappa University of Maryland arxiv:78.3979v3 [cs.cv] 8 Oct 27 najibi@cs.umd.edu Larry S. Davis {pouya,rama,lsd}@umiacs.umd.edu
Conditional Random Fields as Recurrent Neural Networks
 BIL722 - Deep Learning for Computer Vision Conditional Random Fields as Recurrent Neural Networks S. Zheng, S. Jayasumana, B. Romera-Paredes V. Vineet, Z. Su, D. Du, C. Huang, P.H.S. Torr Introduction
BIL722 - Deep Learning for Computer Vision Conditional Random Fields as Recurrent Neural Networks S. Zheng, S. Jayasumana, B. Romera-Paredes V. Vineet, Z. Su, D. Du, C. Huang, P.H.S. Torr Introduction
Part Localization by Exploiting Deep Convolutional Networks
 Part Localization by Exploiting Deep Convolutional Networks Marcel Simon, Erik Rodner, and Joachim Denzler Computer Vision Group, Friedrich Schiller University of Jena, Germany www.inf-cv.uni-jena.de Abstract.
Part Localization by Exploiting Deep Convolutional Networks Marcel Simon, Erik Rodner, and Joachim Denzler Computer Vision Group, Friedrich Schiller University of Jena, Germany www.inf-cv.uni-jena.de Abstract.
arxiv: v1 [cs.cv] 4 Jun 2015
![arxiv: v1 [cs.cv] 4 Jun 2015](/thumbs/92/109659580.jpg "arxiv: v1 [cs.cv] 4 Jun 2015") Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks arxiv:1506.01497v1 [cs.cv] 4 Jun 2015 Shaoqing Ren Kaiming He Ross Girshick Jian Sun Microsoft Research {v-shren, kahe, rbg,
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks arxiv:1506.01497v1 [cs.cv] 4 Jun 2015 Shaoqing Ren Kaiming He Ross Girshick Jian Sun Microsoft Research {v-shren, kahe, rbg,
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Texture Complexity based Redundant Regions Ranking for Object Proposal
 26 IEEE Conference on Computer Vision and Pattern Recognition Workshops Texture Complexity based Redundant Regions Ranking for Object Proposal Wei Ke,2, Tianliang Zhang., Jie Chen 2, Fang Wan, Qixiang
26 IEEE Conference on Computer Vision and Pattern Recognition Workshops Texture Complexity based Redundant Regions Ranking for Object Proposal Wei Ke,2, Tianliang Zhang., Jie Chen 2, Fang Wan, Qixiang
LinkNet: Exploiting Encoder Representations for Efficient Semantic Segmentation
 LinkNet: Exploiting Encoder Representations for Efficient Semantic Segmentation Abhishek Chaurasia School of Electrical and Computer Engineering Purdue University West Lafayette, USA Email: aabhish@purdue.edu
LinkNet: Exploiting Encoder Representations for Efficient Semantic Segmentation Abhishek Chaurasia School of Electrical and Computer Engineering Purdue University West Lafayette, USA Email: aabhish@purdue.edu
Study of Residual Networks for Image Recognition
 Study of Residual Networks for Image Recognition Mohammad Sadegh Ebrahimi Stanford University sadegh@stanford.edu Hossein Karkeh Abadi Stanford University hosseink@stanford.edu Abstract Deep neural networks
Study of Residual Networks for Image Recognition Mohammad Sadegh Ebrahimi Stanford University sadegh@stanford.edu Hossein Karkeh Abadi Stanford University hosseink@stanford.edu Abstract Deep neural networks
arxiv: v1 [cs.cv] 9 Aug 2017
![arxiv: v1 [cs.cv] 9 Aug 2017](/thumbs/78/78708739.jpg "arxiv: v1 [cs.cv] 9 Aug 2017") BlitzNet: A Real-Time Deep Network for Scene Understanding Nikita Dvornik Konstantin Shmelkov Julien Mairal Cordelia Schmid Inria arxiv:1708.02813v1 [cs.cv] 9 Aug 2017 Abstract Real-time scene understanding
BlitzNet: A Real-Time Deep Network for Scene Understanding Nikita Dvornik Konstantin Shmelkov Julien Mairal Cordelia Schmid Inria arxiv:1708.02813v1 [cs.cv] 9 Aug 2017 Abstract Real-time scene understanding
Deeply Cascaded Networks
 Deeply Cascaded Networks Eunbyung Park Department of Computer Science University of North Carolina at Chapel Hill eunbyung@cs.unc.edu 1 Introduction After the seminal work of Viola-Jones[15] fast object
Deeply Cascaded Networks Eunbyung Park Department of Computer Science University of North Carolina at Chapel Hill eunbyung@cs.unc.edu 1 Introduction After the seminal work of Viola-Jones[15] fast object
DeepProposal: Hunting Objects by Cascading Deep Convolutional Layers
 DeepProposal: Hunting Objects by Cascading Deep Convolutional Layers Amir Ghodrati, Ali Diba, Marco Pedersoli 2, Tinne Tuytelaars, Luc Van Gool,3 KU Leuven, ESAT-PSI, iminds 2 Inria 3 CVL, ETH Zurich firstname.lastname@esat.kuleuven.be
DeepProposal: Hunting Objects by Cascading Deep Convolutional Layers Amir Ghodrati, Ali Diba, Marco Pedersoli 2, Tinne Tuytelaars, Luc Van Gool,3 KU Leuven, ESAT-PSI, iminds 2 Inria 3 CVL, ETH Zurich firstname.lastname@esat.kuleuven.be
Learning Fully Dense Neural Networks for Image Semantic Segmentation
 Learning Fully Dense Neural Networks for Image Semantic Segmentation Mingmin Zhen 1, Jinglu Wang 2, Lei Zhou 1, Tian Fang 3, Long Quan 1 1 Hong Kong University of Science and Technology, 2 Microsoft Research
Learning Fully Dense Neural Networks for Image Semantic Segmentation Mingmin Zhen 1, Jinglu Wang 2, Lei Zhou 1, Tian Fang 3, Long Quan 1 1 Hong Kong University of Science and Technology, 2 Microsoft Research
arxiv: v1 [cs.cv] 21 Nov 2018
![arxiv: v1 [cs.cv] 21 Nov 2018](/thumbs/90/103716728.jpg "arxiv: v1 [cs.cv] 21 Nov 2018") AttentionMask: Attentive, Efficient Object Proposal Generation Focusing on Small Objects arxiv:1811.08728v1 [cs.cv] 21 Nov 2018 Christian Wilms and Simone Frintrop University of Hamburg {wilms,frintrop}@informatik.uni-hamburg.de
AttentionMask: Attentive, Efficient Object Proposal Generation Focusing on Small Objects arxiv:1811.08728v1 [cs.cv] 21 Nov 2018 Christian Wilms and Simone Frintrop University of Hamburg {wilms,frintrop}@informatik.uni-hamburg.de
Supplementary Material: Unconstrained Salient Object Detection via Proposal Subset Optimization
 Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
An Analysis of Scale Invariance in Object Detection SNIP
 An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
arxiv: v1 [cs.cv] 8 Mar 2017 Abstract
![arxiv: v1 [cs.cv] 8 Mar 2017 Abstract](/thumbs/74/70449616.jpg "arxiv: v1 [cs.cv] 8 Mar 2017 Abstract") Large Kernel Matters Improve Semantic Segmentation by Global Convolutional Network Chao Peng Xiangyu Zhang Gang Yu Guiming Luo Jian Sun School of Software, Tsinghua University, {pengc14@mails.tsinghua.edu.cn,
Large Kernel Matters Improve Semantic Segmentation by Global Convolutional Network Chao Peng Xiangyu Zhang Gang Yu Guiming Luo Jian Sun School of Software, Tsinghua University, {pengc14@mails.tsinghua.edu.cn,
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
Pixel Offset Regression (POR) for Single-shot Instance Segmentation
 for Single-shot Instance Segmentation") Pixel Offset Regression (POR) for Single-shot Instance Segmentation Yuezun Li 1, Xiao Bian 2, Ming-ching Chang 1, Longyin Wen 2 and Siwei Lyu 1 1 University at Albany, State University of New York, NY,
Pixel Offset Regression (POR) for Single-shot Instance Segmentation Yuezun Li 1, Xiao Bian 2, Ming-ching Chang 1, Longyin Wen 2 and Siwei Lyu 1 1 University at Albany, State University of New York, NY,
Learning to Generate Object Segmentation Proposals with Multi-modal Cues
 Learning to Generate Object Segmentation Proposals with Multi-modal Cues Haoyang Zhang 1,2, Xuming He 2,1, Fatih Porikli 1,2 1 The Australian National University, 2 Data61, CSIRO, Canberra, Australia {haoyang.zhang,xuming.he,
Learning to Generate Object Segmentation Proposals with Multi-modal Cues Haoyang Zhang 1,2, Xuming He 2,1, Fatih Porikli 1,2 1 The Australian National University, 2 Data61, CSIRO, Canberra, Australia {haoyang.zhang,xuming.he,
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains
 Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL
 PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL Yingxin Lou 1, Guangtao Fu 2, Zhuqing Jiang 1, Aidong Men 1, and Yun Zhou 2 1 Beijing University of Posts and Telecommunications, Beijing,
PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL Yingxin Lou 1, Guangtao Fu 2, Zhuqing Jiang 1, Aidong Men 1, and Yun Zhou 2 1 Beijing University of Posts and Telecommunications, Beijing,
arxiv: v1 [cs.cv] 6 Jul 2016
![arxiv: v1 [cs.cv] 6 Jul 2016](/thumbs/80/81416563.jpg "arxiv: v1 [cs.cv] 6 Jul 2016") arxiv:607.079v [cs.cv] 6 Jul 206 Deep CORAL: Correlation Alignment for Deep Domain Adaptation Baochen Sun and Kate Saenko University of Massachusetts Lowell, Boston University Abstract. Deep neural networks
arxiv:607.079v [cs.cv] 6 Jul 206 Deep CORAL: Correlation Alignment for Deep Domain Adaptation Baochen Sun and Kate Saenko University of Massachusetts Lowell, Boston University Abstract. Deep neural networks
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Edge Boxes: Locating Object Proposals from Edges
 Edge Boxes: Locating Object Proposals from Edges C. Lawrence Zitnick and Piotr Dollár Microsoft Research Abstract. The use of object proposals is an effective recent approach for increasing the computational
Edge Boxes: Locating Object Proposals from Edges C. Lawrence Zitnick and Piotr Dollár Microsoft Research Abstract. The use of object proposals is an effective recent approach for increasing the computational
In Defense of Fully Connected Layers in Visual Representation Transfer
 In Defense of Fully Connected Layers in Visual Representation Transfer Chen-Lin Zhang, Jian-Hao Luo, Xiu-Shen Wei, Jianxin Wu National Key Laboratory for Novel Software Technology, Nanjing University,
In Defense of Fully Connected Layers in Visual Representation Transfer Chen-Lin Zhang, Jian-Hao Luo, Xiu-Shen Wei, Jianxin Wu National Key Laboratory for Novel Software Technology, Nanjing University,
arxiv: v2 [cs.cv] 23 Nov 2016 Abstract
![arxiv: v2 [cs.cv] 23 Nov 2016 Abstract](/thumbs/77/76444748.jpg "arxiv: v2 [cs.cv] 23 Nov 2016 Abstract") Simple Does It: Weakly Supervised Instance and Semantic Segmentation Anna Khoreva 1 Rodrigo Benenson 1 Jan Hosang 1 Matthias Hein 2 Bernt Schiele 1 1 Max Planck Institute for Informatics, Saarbrücken,
Simple Does It: Weakly Supervised Instance and Semantic Segmentation Anna Khoreva 1 Rodrigo Benenson 1 Jan Hosang 1 Matthias Hein 2 Bernt Schiele 1 1 Max Planck Institute for Informatics, Saarbrücken,
Know your data - many types of networks
 Architectures Know your data - many types of networks Fixed length representation Variable length representation Online video sequences, or samples of different sizes Images Specific architectures for
Architectures Know your data - many types of networks Fixed length representation Variable length representation Online video sequences, or samples of different sizes Images Specific architectures for
RefineNet: Multi-Path Refinement Networks for High-Resolution Semantic Segmentation
 : Multi-Path Refinement Networks for High-Resolution Semantic Segmentation Guosheng Lin 1,2, Anton Milan 1, Chunhua Shen 1,2, Ian Reid 1,2 1 The University of Adelaide, 2 Australian Centre for Robotic
: Multi-Path Refinement Networks for High-Resolution Semantic Segmentation Guosheng Lin 1,2, Anton Milan 1, Chunhua Shen 1,2, Ian Reid 1,2 1 The University of Adelaide, 2 Australian Centre for Robotic
Semantic Segmentation
 Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
arxiv: v1 [cs.cv] 4 Dec 2014
![arxiv: v1 [cs.cv] 4 Dec 2014](/thumbs/83/87999872.jpg "arxiv: v1 [cs.cv] 4 Dec 2014") Convolutional Neural Networks at Constrained Time Cost Kaiming He Jian Sun Microsoft Research {kahe,jiansun}@microsoft.com arxiv:1412.1710v1 [cs.cv] 4 Dec 2014 Abstract Though recent advanced convolutional
Convolutional Neural Networks at Constrained Time Cost Kaiming He Jian Sun Microsoft Research {kahe,jiansun}@microsoft.com arxiv:1412.1710v1 [cs.cv] 4 Dec 2014 Abstract Though recent advanced convolutional
Classifying a specific image region using convolutional nets with an ROI mask as input
 Classifying a specific image region using convolutional nets with an ROI mask as input 1 Sagi Eppel Abstract Convolutional neural nets (CNN) are the leading computer vision method for classifying images.
Classifying a specific image region using convolutional nets with an ROI mask as input 1 Sagi Eppel Abstract Convolutional neural nets (CNN) are the leading computer vision method for classifying images.
Deep Neural Networks:
 Deep Neural Networks: Part II Convolutional Neural Network (CNN) Yuan-Kai Wang, 2016 Web site of this course: http://pattern-recognition.weebly.com source: CNN for ImageClassification, by S. Lazebnik,
Deep Neural Networks: Part II Convolutional Neural Network (CNN) Yuan-Kai Wang, 2016 Web site of this course: http://pattern-recognition.weebly.com source: CNN for ImageClassification, by S. Lazebnik,
arxiv: v1 [cs.cv] 11 Apr 2018
![arxiv: v1 [cs.cv] 11 Apr 2018](/thumbs/89/99253021.jpg "arxiv: v1 [cs.cv] 11 Apr 2018") arxiv:1804.03821v1 [cs.cv] 11 Apr 2018 ExFuse: Enhancing Feature Fusion for Semantic Segmentation Zhenli Zhang 1, Xiangyu Zhang 2, Chao Peng 2, Dazhi Cheng 3, Jian Sun 2 1 Fudan University, 2 Megvii Inc.
arxiv:1804.03821v1 [cs.cv] 11 Apr 2018 ExFuse: Enhancing Feature Fusion for Semantic Segmentation Zhenli Zhang 1, Xiangyu Zhang 2, Chao Peng 2, Dazhi Cheng 3, Jian Sun 2 1 Fudan University, 2 Megvii Inc.
arxiv: v1 [cs.cv] 7 Aug 2017
![arxiv: v1 [cs.cv] 7 Aug 2017](/thumbs/81/83599070.jpg "arxiv: v1 [cs.cv] 7 Aug 2017") LEARNING TO SEGMENT ON TINY DATASETS: A NEW SHAPE MODEL Maxime Tremblay, André Zaccarin Computer Vision and Systems Laboratory, Université Laval Quebec City (QC), Canada arxiv:1708.02165v1 [cs.cv] 7 Aug
LEARNING TO SEGMENT ON TINY DATASETS: A NEW SHAPE MODEL Maxime Tremblay, André Zaccarin Computer Vision and Systems Laboratory, Université Laval Quebec City (QC), Canada arxiv:1708.02165v1 [cs.cv] 7 Aug
Object Proposal by Multi-branch Hierarchical Segmentation
 Object Proposal by Multi-branch Hierarchical Segmentation Chaoyang Wang Shanghai Jiao Tong University wangchaoyang@sjtu.edu.cn Long Zhao Tongji University 92garyzhao@tongji.edu.cn Shuang Liang Tongji University
Object Proposal by Multi-branch Hierarchical Segmentation Chaoyang Wang Shanghai Jiao Tong University wangchaoyang@sjtu.edu.cn Long Zhao Tongji University 92garyzhao@tongji.edu.cn Shuang Liang Tongji University
Supplementary material for Analyzing Filters Toward Efficient ConvNet
 Supplementary material for Analyzing Filters Toward Efficient Net Takumi Kobayashi National Institute of Advanced Industrial Science and Technology, Japan takumi.kobayashi@aist.go.jp A. Orthonormal Steerable
Supplementary material for Analyzing Filters Toward Efficient Net Takumi Kobayashi National Institute of Advanced Industrial Science and Technology, Japan takumi.kobayashi@aist.go.jp A. Orthonormal Steerable
Object Proposal by Multi-branch Hierarchical Segmentation
 Object Proposal by Multi-branch Hierarchical Segmentation Chaoyang Wang Shanghai Jiao Tong University wangchaoyang@sjtu.edu.cn Long Zhao Tongji University 92garyzhao@tongji.edu.cn Shuang Liang Tongji University
Object Proposal by Multi-branch Hierarchical Segmentation Chaoyang Wang Shanghai Jiao Tong University wangchaoyang@sjtu.edu.cn Long Zhao Tongji University 92garyzhao@tongji.edu.cn Shuang Liang Tongji University
Pseudo Mask Augmented Object Detection
 Pseudo Mask Augmented Object Detection Xiangyun Zhao Northwestern University zhaoxiangyun915@gmail.com Shuang Liang Tongji University shuangliang@tongji.edu.cn Yichen Wei Microsoft Research yichenw@microsoft.com
Pseudo Mask Augmented Object Detection Xiangyun Zhao Northwestern University zhaoxiangyun915@gmail.com Shuang Liang Tongji University shuangliang@tongji.edu.cn Yichen Wei Microsoft Research yichenw@microsoft.com
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
CS 1674: Intro to Computer Vision. Object Recognition. Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018
 CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
Pixel-Level Encoding and Depth Layering for Instance-Level Semantic Labeling
 Pixel-Level Encoding and Depth Layering for Instance-Level Semantic Labeling Jonas Uhrig 1,2(B), Marius Cordts 1,3,UweFranke 1, and Thomas Brox 2 1 Daimler AG R&D, Stuttgart, Germany jonas.uhrig@daimler.com
Pixel-Level Encoding and Depth Layering for Instance-Level Semantic Labeling Jonas Uhrig 1,2(B), Marius Cordts 1,3,UweFranke 1, and Thomas Brox 2 1 Daimler AG R&D, Stuttgart, Germany jonas.uhrig@daimler.com
An Analysis of Scale Invariance in Object Detection SNIP
 An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
arxiv: v1 [cs.cv] 6 Jul 2017
![arxiv: v1 [cs.cv] 6 Jul 2017](/thumbs/76/74371360.jpg "arxiv: v1 [cs.cv] 6 Jul 2017") RON: Reverse Connection with Objectness Prior Networks for Object Detection arxiv:1707.01691v1 [cs.cv] 6 Jul 2017 Tao Kong 1 Fuchun Sun 1 Anbang Yao 2 Huaping Liu 1 Ming Lu 3 Yurong Chen 2 1 State Key
RON: Reverse Connection with Objectness Prior Networks for Object Detection arxiv:1707.01691v1 [cs.cv] 6 Jul 2017 Tao Kong 1 Fuchun Sun 1 Anbang Yao 2 Huaping Liu 1 Ming Lu 3 Yurong Chen 2 1 State Key
Deep Learning in Visual Recognition. Thanks Da Zhang for the slides
 Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Deep Residual Learning
 Deep Residual Learning MSRA @ ILSVRC & COCO 2015 competitions Kaiming He with Xiangyu Zhang, Shaoqing Ren, Jifeng Dai, & Jian Sun Microsoft Research Asia (MSRA) MSRA @ ILSVRC & COCO 2015 Competitions 1st
Deep Residual Learning MSRA @ ILSVRC & COCO 2015 competitions Kaiming He with Xiangyu Zhang, Shaoqing Ren, Jifeng Dai, & Jian Sun Microsoft Research Asia (MSRA) MSRA @ ILSVRC & COCO 2015 Competitions 1st
TEXT SEGMENTATION ON PHOTOREALISTIC IMAGES
 TEXT SEGMENTATION ON PHOTOREALISTIC IMAGES Valery Grishkin a, Alexander Ebral b, Nikolai Stepenko c, Jean Sene d Saint Petersburg State University, 7 9 Universitetskaya nab., Saint Petersburg, 199034,
TEXT SEGMENTATION ON PHOTOREALISTIC IMAGES Valery Grishkin a, Alexander Ebral b, Nikolai Stepenko c, Jean Sene d Saint Petersburg State University, 7 9 Universitetskaya nab., Saint Petersburg, 199034,
Mimicking Very Efficient Network for Object Detection
 Mimicking Very Efficient Network for Object Detection Quanquan Li 1, Shengying Jin 2, Junjie Yan 1 1 SenseTime 2 Beihang University liquanquan@sensetime.com, jsychffy@gmail.com, yanjunjie@outlook.com Abstract
Mimicking Very Efficient Network for Object Detection Quanquan Li 1, Shengying Jin 2, Junjie Yan 1 1 SenseTime 2 Beihang University liquanquan@sensetime.com, jsychffy@gmail.com, yanjunjie@outlook.com Abstract
Closing the Loop for Edge Detection and Object Proposals
 Closing the Loop for Edge Detection and Object Proposals Yao Lu and Linda Shapiro University of Washington {luyao, shapiro}@cs.washington.edu Abstract Edge grouping and object perception are unified procedures
Closing the Loop for Edge Detection and Object Proposals Yao Lu and Linda Shapiro University of Washington {luyao, shapiro}@cs.washington.edu Abstract Edge grouping and object perception are unified procedures
LEARNING DENSE CONVOLUTIONAL EMBEDDINGS
 LEARNING DENSE CONVOLUTIONAL EMBEDDINGS FOR SEMANTIC SEGMENTATION Adam W. Harley & Konstantinos G. Derpanis Ryerson University {aharley,kosta}@scs.ryerson.ca Iasonas Kokkinos CentraleSupélec and INRIA
LEARNING DENSE CONVOLUTIONAL EMBEDDINGS FOR SEMANTIC SEGMENTATION Adam W. Harley & Konstantinos G. Derpanis Ryerson University {aharley,kosta}@scs.ryerson.ca Iasonas Kokkinos CentraleSupélec and INRIA
Iteratively Trained Interactive Segmentation
 MAHADEVAN ET AL.: ITERATIVELY TRAINED INTERACTIVE SEGMENTATION 1 Iteratively Trained Interactive Segmentation Sabarinath Mahadevan mahadevan@vision.rwth-aachen.de Paul Voigtlaender voigtlaender@vision.rwth-aachen.de
MAHADEVAN ET AL.: ITERATIVELY TRAINED INTERACTIVE SEGMENTATION 1 Iteratively Trained Interactive Segmentation Sabarinath Mahadevan mahadevan@vision.rwth-aachen.de Paul Voigtlaender voigtlaender@vision.rwth-aachen.de