Reconfigurable Kinetic Polygons: An Approach to Designing 2D Kinetic Tessellations
|
|
|
- Iris Ross
- 6 years ago
- Views:
Transcription
1 Reconfigurable Kinetic Polygons: An Approach to Designing 2D Kinetic Tessellations Negar Kalantar Dept. of Architecture Texas A&M University Alireza Borhani Dept. of Architecture Texas A&M University Abstract In this research, we discuss underlying geometries and overlaid patterns as principles of kinetic design, and consider how designers might generate a wide variety of kinetic patterns. We also present three approaches to designing kinetic polygons with a scissor mechanism. Finally, as a means of better understanding the kinetic design process and motion composition in general, this work presents a series of reconfigurable magnetic kinetic modules named L8 that offer numerous kinetic compositions, and it presents authentic fabrication process of L8 blocks. Introduction In general, most of the existing research and practice relevant to motion design do not consider motion itself, nor do they present a comprehensive kinetic design methodology. Therefore, the existing body of literature on motion design does not provide sufficient insight for those seeking to learn about its complexities, compositional character, possible configurations, or the general composition of movement. The full depth of the motion design process cannot be understood by theory alone. Therefore, to better understand the design process and relationships that craft motion composition, we present a series of reconfigurable kinetic tessellations that offer a variety of kinetic compositions. In exploring kinetic tessellations, we explain certain fundamental design aspects of kinetic patterns, as well as the following: 1- The principles of kinetic design, such as underlying geometries and overlaid patterns; 2- Design principles of kinetic polygons with scissor linkages; and the 3- Potential of reconfigurable kinetic tessellations. Principles of Kinetic Design: Underlying Geometries and Overlaid Patterns Motion has a strong bond with geometry because at its core, motion is the spatial transformation of one geometric configuration into another [1]. The underlying geometry of any kinetic structure can be described as the geometry of motion. It is a fundamental element in geometric thinking and the general concept of motion. Motion geometry traces the positions of different components to reveal the relationships among them. Every kinetic design has three main components: kinematics, materials, and behaviors. Kinematics refers to the geometry of motion without consideration of the causes of that motion. It deals with the geometry of motion on its own, isolated from the forces associated with movement [2]. Kinetics, by comparison, is the study of the causes of motion. Each kinetic design has three fundamental design parameters, including kinematic, or the geometry of motion; material, or the
2 physical properties; and behavioral, or time-based control of motion. In this research, the main focus is on kinematics. In developing kinetic tessellations, the primary category of knowledge the designer must master is kinematic knowledge. There are three main elements in kinematic design: 1) linkage, 2) joint, and 3) point of connection to the ground [3]. Linkages are rigid bodies that transfer force through a kinetic structure. Joints are the connections between bodies that define constraints on the movement of the kinetic structure. Finally, points of connection to the ground are the static points of reference for the entire kinetic structure. In this research, we explore kinetic tessellations with one degree of freedom. 1 For example, in Figure 1, the red L shapes are linkages and the black dots are joints. In the depicted kinetic polygon, any of the joints could be considered the points of connection to the ground. Figure 1. Linkages and joints. The linkage on the left, the whole L shape is rigid, and does not bend at point 2. The authors of this research has coined two terms to help designers understand and design simple kinetic geometries. In any kinetic design process, there are two design efforts: the generation of an underlying geometry and the creation of an overlaid pattern [4]. The underlying geometry of any kinetic structure can be described as the design s geometric constraints on motion. Here, the geometry of pure motion is considered without reference to force or mass. A transformation in the underlying geometry of motion outlines the relationships among elements, their arrangement, and the final layout of the motion composition regardless of certain values such as the dimensions or shapes of elements. By manipulating the positions of the endpoints and shifting the locations of the connectors where the elements intersect, a new set of motion compositions can be constructed. In spite of maintaining geometric relationships among the various elements of a motion composition, a transformation in the geometry of each element could result in changes to the overlying geometry. The overlying geometry, however, is a secondary issue compared to the underlying geometry. Transformations in the overlying geometry are the result of manipulating the applicable ranges of values for different variables. By modifying an element s proportions, adding additional elements, or altering the shape of an element by adding another given shape, the composition may have a familiar structure but with a different appearance, thus generating another design. 1 Degree of Freedom (DOF) is the number of independent motions that the body is allowed, or in the case of a mechanism made of several bodies, the number of possible independent relative motions among the various pieces of the mechanism [5].

3 In Figure 2, the left box presents the underlying geometry of a simple kinetic polygon, and the right box shows the five other possibilities of the overlaid pattern for this kinetic polygon. In other words, any linkage connecting points 1, 2, and 3 could be an overlaid pattern for this kinetic design. The geometrical integrity of this kinetic polygon will be maintained if the three points are connected with a rigid body of any shape. Therefore, the underlying geometry of motion can produce endless kinetic patterns simply by changing the overlaid design (see Figure 3). Figure 2: Underlying geometry (left) and overlaid pattern (right). Figure 3: Different kinetic polygons with the same underlying geometry. Design Principles of Kinetic Polygons with Scissor Linkages In this section, we present a methodology for designing regular and irregular kinetic polygons. The kinetic polygon is based on scissor linkages (see Figure 4). An historical example of a scissor mechanism is the deployable structures of Sergio Pellegrino [6]. Later, Felix Escrig, P.E. Kassabian, Zhong You, and Chuck Hoberman all extensively expanded scissor structures [7]. Generally, there are three types of scissor linkages (see Figure 5): 1- Parallel scissors (center connection) that provide no curvature in the kinetic structure; 2- Parallel scissors (off-center connection) that provide a variable curvature; and 3- Angulated scissors that provide a constant curvature.
4 Figure 4: An example of a kinetic polygon. Figure 5: Three types of scissor structures: Parallel scissors center connection (left), Parallel scissors -off-center connection (middle) and Angulated scissors (right) Angulated Scissors Linkages Angulated scissors are an alteration of the original scissor concept that consists of bending the rigid elements to achieve a desired angle and form polygonal shapes not possible with straight scissors. With angulated scissors, it is possible to design kinetic geometries for all types of regular and irregular, convex and concave polygons. The design process for kinetic polygons includes the following (see Figure 6 and Figure 7): 1- Draw a polygon with any number of sides; 2- Define the midpoints of all sides; 3- Draw an angulated polyline between every vertex and two neighboring midpoints. This polyline is an angulated scissor element; and 4- Pair each angulated scissor element with the same element and connect them together.
5 Figure 6: Design process for a regular kinetic polygon. Figure 7: Design process for an irregular kinetic polygon. There are different methods for designing kinetic polygons. Figure 8, Figure 9, and Figure 10 present additional approaches (geometric and algebraic) to designing angulated scissors for kinetic polygons. However, in the author s opinion, the following method is the simplest. 1- Draw two circles, same center. 2- Draw an inscribed polygon inside the larger circle. 3- Draw two adjacent radii to define a section of the polygon. 4- Draw two perpendicular lines at the midpoints of Segments AB and AC, the intersection of these two lines defines the location of point O. 5- Draw an angulated polyline between points A, O, and D. 6- Mirror the angulated element (AOD), and then array the points to design the kinetic polygon.



6 Figure 8: A geometric approach to designing the angulated scissor structure used in a polygon. Figure 9: An overlaid pattern applied after designing the underlying geometry. The acrylic model of the kinetic pattern (left). The process of designing the overlaid pattern (right).



7 Figure 10: An algebraic approach to defining the angle of an angulated scissor. As discussed above, the underlying geometry is the key to movement. After finding the underlying geometry, a designer can design an unlimited number of overlaying patterns. Although there are limitless possibilities, collision is one constraint that must be checked. In order to make sure that a specific shape will work with the tessellation, the geometry should be rotated from a closed position to an open one. This is shown in the technical drawings depicted in Figure 11. Figure 11: To avoid collisions, the geometry should be rotated from a closed position to an open one.

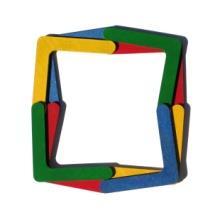
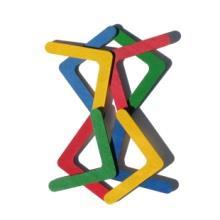
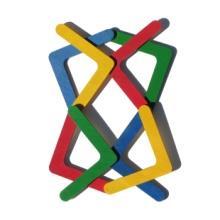
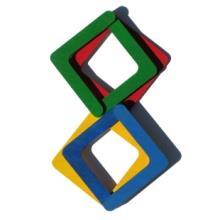
8 Reconfigurable Kinetic Tessellations The full depth of the motion design process cannot be understood by theory alone. Therefore, to achieve a better understanding of the design process and the internal and external factors that craft a motion composition, we designed and fabricated a series of Reconfigurable Kinetic Tessellations named L8 that offer a variety of kinetic compositions. L8 is a series of magnetic-kinetic simulators comprised of eight pieces that can be assembled in multiple configurations. L8 is generated from a four-sided polygon (see Figure 12). Figure 12: The underlying geometry of L8, generated from a four-sided polygon. One of L8 s innovations is the use of magnets as pivot points for the kinetic patterns. Generally, when fabricating kinetic models, we use screws and nuts to connect the linkages together. In contrast, L8 has a strong permanent magnet housed internally within each of the three vertices of the block, all at approximate right angles to one another. These internal magnets are not directly accessible to the user, but they allow the magnetic connections to pivot with similar blocks or other magnetic parts. One of L8 s most critical aspects is that the internal magnets act as pivoting hinges for different kinetic patterns. The use of internal magnets provides a relatively simple and cost-effective method for attaching multiple components when using materials that can be produced through extrusion or molding operations. We explored different methods of fabricating elements, including a laser cutter, lamination, 3D printing, and injection molding. Interestingly, L8 was designed for a specific kinetic pattern (see Figure 13); however, because of the embedded magnets, we discovered that countless kinetic patterns were possible by assembling and disassembling the blocks for different compositions (see Table 1). Figure 13: Basic L8 based on the pure underlying geometry. Here, the linkages are not purely 2D. The links occur in at least TWO different layers.





.")
9 The magnets allow for universal magnetic connections to be made with similar members or other magnetic elements. The spacing of the magnets permits a variety of shapes to be made and substantial flexibility when multiple members are connected. Thus, the magnets act similarly to joints, connecting all of the members. The poles of there magnets in every L block are of same polarity. Therefore, you can stack all L blocks from one side. Figure 14, 15, and 16 show different fabrication methods of embedding magnets inside the blocks. Figure 14: This block is made of wood and has smooth surfaces. Each block is.62 inches wide, 3.6 inches long on each side, and.15 inches thick. Each module consists of three layers (two thin veneer layers on top and bottom and one 1/16 inch thick piece of plywood as the middle layer). All layers were laser cut and laminated together to hold three magnets inside the module. Figure 15: 3D-printed L8 modules. Figure 16: Injection-molded parts for mass production. The two caps are the same modules. This was done to decrease the cost of fabrication. After embedding the magnets, the plastic parts were welded together.






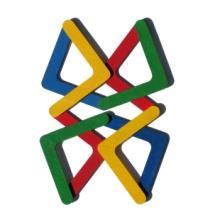

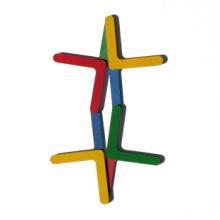
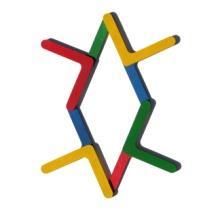
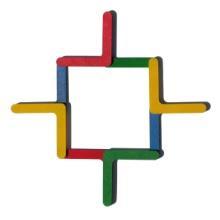
10 Table 1: Eight different kinetic L8 compositions. Rows 1,2,3 and 6 have 8 actively turning pivots, while others rows have only 4 actively turning pivots (rows 4, 5, and 7).



















11 The three vertices of the L act as a foundation for numerous other shapes, such as circular, elliptical, polygonal, and the like. As discussed as it relates to underlying geometry, in L8, the three points are the most crucial parts of the tessellation. As long as these points remain precisely in the correct positions, most shapes can be overlaid to create a variety of compositions. We implemented this rule to facilitate the design of different overlaid patterns such as circular, T, and U shapes. Although they look different, all of these shapes have three magnets in the same locations. Each group of magnetic members generates various forms of the same kinetic geometric composition. Since the location of the magnets remains the same, each set can be mixed with other sets to make interesting compositions (see Figure 18). Figure 17: Different overlaid patterns from the L8 design. Figure 18: In L8, the locations of the magnets are the same; therefore, each set can be mixed with other sets to make interesting compositions.





12 One of the purposes of designing the kinetic simulator we call L8 was for its educational value; it allows users to play with geometry without having to understand important underlying principles. The units are color coded to make variously colored geometric patterns and simplify the process of assembly (Figure 19). Figure 19: L8 as an educational toy. Future Work We are collaborating with the computer science department 2 at Texas A&M University to digitize the physical mechanism in L8; this will help future users to learn about linkages, joints, kinematics, degrees of freedom, and the geometry of motion. Exploring these functions will also assist designers in understanding kinematics and developing ideas regarding the physics of how objects move and act in a system. Our prototype was built in Unity3D for ipads running ios 10 or later. We simulated the kinematics by using a combination of Unity Fixed and Hinge Joints; the user can interact with these joints by touching and dragging with one or two fingers on the ipad. The final result will be an application that behaves like the physical version but in a way that is more precise, because the prototype will remove the possibility of pieces connecting that aren t adjacent to one another and eliminate the limitation of repelling magnetic poles (see Figure 20). Figure 20: L8 application prototype: a kinetic application for ipads developed by Kyle Purser, Conner Flatt, and Kyle Rowland. 2 Dr. Dylan Shell from the Department of Computer Science at Texas A&M worked with the authors.
13 Conclusion In this research, we introduced three methods for designing kinetic polygons that can be applied to any type of closed 2D geometry, such as regular/irregular or convex/concave polygons. We also presented a series of reconfigurable kinetic tessellations called L8 that was designed and fabricated to explore the possibilities of kinetic motion compositions. Finally, we introduced an application still in development that digitizes L8 s physical mechanism. We believe it will help others learn about linkages, joints, kinematics, degrees of freedom, and the geometry of motion. References [1] Negar Kalantar, Alireza Borhani, Studio in Transformation: Transformation in Studio. Journal of Architectural Education, 70(1), [2] Hunt. Kinematic Geometry of Mechanisms, Clarendon Press [3] Myszka, D. H. Machines and mechanisms : applied kinematic analysis. 4th ed, Upper Saddle River, N.J. : Pearson Prentice Hall [4] Negar Kalantar, Alireza Borhani, Starting with Transformation: First Introduction of Motion. In C. Trudell, C. Olsen, & J. Pointz (Eds.). 1:1: Proceeding of The National Conference on the Beginning Design Students 32, Cal Poly San Luis Obispo, CA (pp ), California: California Polytechnic State University [5] Chuck Hoberman. Info: (as of May 15, 2017) [6] F. Escrig, Emilio Perez Pinero: Inventor of Deployability. In Structures and Architecture: Concepts, Applications and Challenges edited by Cruz (ed), Taylor & Francis Group, London [7] R. Kronenburg, Transportable environments 3. Taylor & Francis
New solutions for foldable roof structures Z. You, S. Pellegrino Department of Engineering, Cambridge University, Trumpington
 New solutions for foldable roof structures Z. You, S. Pellegrino Department of Engineering, Cambridge University, Trumpington Abstract A new, general type of two-dimensional foldable structures is presented,
New solutions for foldable roof structures Z. You, S. Pellegrino Department of Engineering, Cambridge University, Trumpington Abstract A new, general type of two-dimensional foldable structures is presented,
Deployable Folded-core Sandwich Panels Guided by a Generating Surface
 Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam 17-20 August 2015, Amsterdam, The Netherlands Deployable Folded-core Sandwich Panels Guided
Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam 17-20 August 2015, Amsterdam, The Netherlands Deployable Folded-core Sandwich Panels Guided
Copyright 2009 Pearson Education, Inc. Chapter 9 Section 5 - Slide 1 AND
 Copyright 2009 Pearson Education, Inc. Chapter 9 Section 5 - Slide 1 AND Chapter 9 Geometry Copyright 2009 Pearson Education, Inc. Chapter 9 Section 5 - Slide 2 WHAT YOU WILL LEARN Transformational geometry,
Copyright 2009 Pearson Education, Inc. Chapter 9 Section 5 - Slide 1 AND Chapter 9 Geometry Copyright 2009 Pearson Education, Inc. Chapter 9 Section 5 - Slide 2 WHAT YOU WILL LEARN Transformational geometry,
Curriki Geometry Glossary
 Curriki Geometry Glossary The following terms are used throughout the Curriki Geometry projects and represent the core vocabulary and concepts that students should know to meet Common Core State Standards.
Curriki Geometry Glossary The following terms are used throughout the Curriki Geometry projects and represent the core vocabulary and concepts that students should know to meet Common Core State Standards.
Lecture 3. Planar Kinematics
 Matthew T. Mason Mechanics of Manipulation Outline Where are we? s 1. Foundations and general concepts. 2.. 3. Spherical and spatial kinematics. Readings etc. The text: By now you should have read Chapter
Matthew T. Mason Mechanics of Manipulation Outline Where are we? s 1. Foundations and general concepts. 2.. 3. Spherical and spatial kinematics. Readings etc. The text: By now you should have read Chapter
WEEKS 1-2 MECHANISMS
 References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
a triangle with all acute angles acute triangle angles that share a common side and vertex adjacent angles alternate exterior angles
 acute triangle a triangle with all acute angles adjacent angles angles that share a common side and vertex alternate exterior angles two non-adjacent exterior angles on opposite sides of the transversal;
acute triangle a triangle with all acute angles adjacent angles angles that share a common side and vertex alternate exterior angles two non-adjacent exterior angles on opposite sides of the transversal;
ARCHITECTURE & GAMES. A is for Architect Simple Mass Modeling FORM & SPACE. Industry Careers Framework. Applied. Getting Started.
 A is for Architect Simple Mass Modeling One of the first introductions to form and space usually comes at a very early age. As an infant, you might have played with building blocks to help hone your motor
A is for Architect Simple Mass Modeling One of the first introductions to form and space usually comes at a very early age. As an infant, you might have played with building blocks to help hone your motor
Module 4A: Creating the 3D Model of Right and Oblique Pyramids
 Inventor (5) Module 4A: 4A- 1 Module 4A: Creating the 3D Model of Right and Oblique Pyramids In Module 4A, we will learn how to create 3D solid models of right-axis and oblique-axis pyramid (regular or
Inventor (5) Module 4A: 4A- 1 Module 4A: Creating the 3D Model of Right and Oblique Pyramids In Module 4A, we will learn how to create 3D solid models of right-axis and oblique-axis pyramid (regular or
ME 111: Engineering Drawing. Geometric Constructions
 ME 111: Engineering Drawing Lecture 2 01-08-2011 Geometric Constructions Indian Institute of Technology Guwahati Guwahati 781039 Geometric Construction Construction of primitive geometric forms (points,
ME 111: Engineering Drawing Lecture 2 01-08-2011 Geometric Constructions Indian Institute of Technology Guwahati Guwahati 781039 Geometric Construction Construction of primitive geometric forms (points,
Geometry Foundations Planning Document
 Geometry Foundations Planning Document Unit 1: Chromatic Numbers Unit Overview A variety of topics allows students to begin the year successfully, review basic fundamentals, develop cooperative learning
Geometry Foundations Planning Document Unit 1: Chromatic Numbers Unit Overview A variety of topics allows students to begin the year successfully, review basic fundamentals, develop cooperative learning
Study Guide - Geometry
 Study Guide - Geometry (NOTE: This does not include every topic on the outline. Take other steps to review those.) Page 1: Rigid Motions Page 3: Constructions Page 12: Angle relationships Page 14: Angle
Study Guide - Geometry (NOTE: This does not include every topic on the outline. Take other steps to review those.) Page 1: Rigid Motions Page 3: Constructions Page 12: Angle relationships Page 14: Angle
Module 1 Session 1 HS. Critical Areas for Traditional Geometry Page 1 of 6
 Critical Areas for Traditional Geometry Page 1 of 6 There are six critical areas (units) for Traditional Geometry: Critical Area 1: Congruence, Proof, and Constructions In previous grades, students were
Critical Areas for Traditional Geometry Page 1 of 6 There are six critical areas (units) for Traditional Geometry: Critical Area 1: Congruence, Proof, and Constructions In previous grades, students were
3 Polygonal Modeling. Getting Started with Maya 103
 3 Polygonal Modeling In Maya, modeling refers to the process of creating virtual 3D surfaces for the characters and objects in the Maya scene. Surfaces play an important role in the overall Maya workflow
3 Polygonal Modeling In Maya, modeling refers to the process of creating virtual 3D surfaces for the characters and objects in the Maya scene. Surfaces play an important role in the overall Maya workflow
Digital design of deployable scissor grids based on circle packing
 Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam 17-20 August 2015, Amsterdam, The Netherlands Digital design of deployable scissor grids based
Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam 17-20 August 2015, Amsterdam, The Netherlands Digital design of deployable scissor grids based
IwamotoScott. Works. DigDesFab - WS Rhina Portillo & Raphael Laurintytär
 IwamotoScott Works Lisa Iwamoto Master of Architecture degree with Distinction from Harvard University Taught previously at Harvard University Architectural Intern at Morphosis. Currently an Assistant
IwamotoScott Works Lisa Iwamoto Master of Architecture degree with Distinction from Harvard University Taught previously at Harvard University Architectural Intern at Morphosis. Currently an Assistant
UNIT 1 GEOMETRY TEMPLATE CREATED BY REGION 1 ESA UNIT 1
 UNIT 1 GEOMETRY TEMPLATE CREATED BY REGION 1 ESA UNIT 1 Traditional Pathway: Geometry The fundamental purpose of the course in Geometry is to formalize and extend students geometric experiences from the
UNIT 1 GEOMETRY TEMPLATE CREATED BY REGION 1 ESA UNIT 1 Traditional Pathway: Geometry The fundamental purpose of the course in Geometry is to formalize and extend students geometric experiences from the
Explorations of Rigid Motions and Congruence
 Explorations of Rigid Motions and Congruence James King University of Washington Department of Mathematics king@uw.edu http://www.math.washington.edu/~king The Plan In this session, we will explore exploring.
Explorations of Rigid Motions and Congruence James King University of Washington Department of Mathematics king@uw.edu http://www.math.washington.edu/~king The Plan In this session, we will explore exploring.
Unit 1, Lesson 1: Moving in the Plane
 Unit 1, Lesson 1: Moving in the Plane Let s describe ways figures can move in the plane. 1.1: Which One Doesn t Belong: Diagrams Which one doesn t belong? 1.2: Triangle Square Dance m.openup.org/1/8-1-1-2
Unit 1, Lesson 1: Moving in the Plane Let s describe ways figures can move in the plane. 1.1: Which One Doesn t Belong: Diagrams Which one doesn t belong? 1.2: Triangle Square Dance m.openup.org/1/8-1-1-2
The National Strategies Secondary Mathematics exemplification: Y8, 9
 Mathematics exemplification: Y8, 9 183 As outcomes, Year 8 pupils should, for example: Understand a proof that the sum of the angles of a triangle is 180 and of a quadrilateral is 360, and that the exterior
Mathematics exemplification: Y8, 9 183 As outcomes, Year 8 pupils should, for example: Understand a proof that the sum of the angles of a triangle is 180 and of a quadrilateral is 360, and that the exterior
Kinematics: Intro. Kinematics is study of motion
 Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Module 4B: Creating Sheet Metal Parts Enclosing The 3D Space of Right and Oblique Pyramids With The Work Surface of Derived Parts
 Inventor (5) Module 4B: 4B- 1 Module 4B: Creating Sheet Metal Parts Enclosing The 3D Space of Right and Oblique Pyramids With The Work Surface of Derived Parts In Module 4B, we will learn how to create
Inventor (5) Module 4B: 4B- 1 Module 4B: Creating Sheet Metal Parts Enclosing The 3D Space of Right and Oblique Pyramids With The Work Surface of Derived Parts In Module 4B, we will learn how to create
Mathematics High School Geometry An understanding of the attributes and relationships of geometric objects can be applied in diverse contexts
 Mathematics High School Geometry An understanding of the attributes and relationships of geometric objects can be applied in diverse contexts interpreting a schematic drawing, estimating the amount of
Mathematics High School Geometry An understanding of the attributes and relationships of geometric objects can be applied in diverse contexts interpreting a schematic drawing, estimating the amount of
Geometry CP. Unit 1 Notes
 Geometry CP Unit 1 Notes 1.1 The Building Blocks of Geometry The three most basic figures of geometry are: Points Shown as dots. No size. Named by capital letters. Are collinear if a single line can contain
Geometry CP Unit 1 Notes 1.1 The Building Blocks of Geometry The three most basic figures of geometry are: Points Shown as dots. No size. Named by capital letters. Are collinear if a single line can contain
Scope and Sequence for the Maryland Voluntary State Curriculum for Mathematics
 Scope and Sequence for the Maryland Voluntary State Curriculum for Mathematics The following chart provides an overview of where within Prentice Hall Course 1 Mathematics each of the Objectives of the
Scope and Sequence for the Maryland Voluntary State Curriculum for Mathematics The following chart provides an overview of where within Prentice Hall Course 1 Mathematics each of the Objectives of the
3.2 A Three-Bar Linkage 51
 3.2 A Three-Bar Linkage 51 It may happen that the drawing in Euclidean view is too big or too small. You can use the zooming tools to change this. There is a Zoom-In and a Zoom-Out tool below the Euclidean
3.2 A Three-Bar Linkage 51 It may happen that the drawing in Euclidean view is too big or too small. You can use the zooming tools to change this. There is a Zoom-In and a Zoom-Out tool below the Euclidean
MACRO-SCALE PRECISION ALIGNMENT. 3.1 Precision Machine Design Alignment Principles
 Chapter 3 MACRO-SCALE PRECISION ALIGNMENT 3.1 Precision Machine Design Alignment Principles Whenever two solid bodies are positioned with respect to each other, the quality of the alignment can be described
Chapter 3 MACRO-SCALE PRECISION ALIGNMENT 3.1 Precision Machine Design Alignment Principles Whenever two solid bodies are positioned with respect to each other, the quality of the alignment can be described
Spatial R-C-C-R Mechanism for a Single DOF Gripper
 NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
Mathematics High School Geometry
 Mathematics High School Geometry An understanding of the attributes and relationships of geometric objects can be applied in diverse contexts interpreting a schematic drawing, estimating the amount of
Mathematics High School Geometry An understanding of the attributes and relationships of geometric objects can be applied in diverse contexts interpreting a schematic drawing, estimating the amount of
Patterns in Geometry. Polygons. Investigation 1 UNIT. Explore. Vocabulary. Think & Discuss
 UNIT K Patterns in Geometry In this lesson, you will work with two-dimensional geometric figures. You will classify polygons and find angle measures. Explore Inv 1 Polygons 172 How many squares are in
UNIT K Patterns in Geometry In this lesson, you will work with two-dimensional geometric figures. You will classify polygons and find angle measures. Explore Inv 1 Polygons 172 How many squares are in
Illustrator 1 Object Creation and Modification Tools
 Illustrator 1 Object Creation and Modification Tools Pen Tool Creates a precision shape using points and curve handles. Shape Tools Creates geometric solids. Selection Tool Selects objects and groups.
Illustrator 1 Object Creation and Modification Tools Pen Tool Creates a precision shape using points and curve handles. Shape Tools Creates geometric solids. Selection Tool Selects objects and groups.
Table of Contents. Introduction to the Math Practice Series...1
 Table of Contents Table of Contents Introduction to the Math Practice Series...1 Common Mathematics/Geometry Symbols and Terms...2 Chapter 1: Introduction To Geometry...13 Shapes, Congruence, Similarity,
Table of Contents Table of Contents Introduction to the Math Practice Series...1 Common Mathematics/Geometry Symbols and Terms...2 Chapter 1: Introduction To Geometry...13 Shapes, Congruence, Similarity,
TRAINING A ROBOTIC MANIPULATOR
 ME 4773/5493 Fundamental of Robotics Fall 2016 San Antonio, TX, USA TRAINING A ROBOTIC MANIPULATOR Jonathan Sackett Dept. of Mechanical Engineering San Antonio, TX, USA 78249 jonathan.sackett@utsa.edu
ME 4773/5493 Fundamental of Robotics Fall 2016 San Antonio, TX, USA TRAINING A ROBOTIC MANIPULATOR Jonathan Sackett Dept. of Mechanical Engineering San Antonio, TX, USA 78249 jonathan.sackett@utsa.edu
Objectives: (What You ll Learn) Identify and model points, lines, planes Identify collinear and coplanar points, intersecting lines and planes
 Identify and model points, lines, planes Identify collinear and coplanar points, intersecting lines and planes") Geometry Chapter 1 Outline: Points, Lines, Planes, & Angles A. 1-1 Points, Lines, and Planes (What You ll Learn) Identify and model points, lines, planes Identify collinear and coplanar points, intersecting
Geometry Chapter 1 Outline: Points, Lines, Planes, & Angles A. 1-1 Points, Lines, and Planes (What You ll Learn) Identify and model points, lines, planes Identify collinear and coplanar points, intersecting
Lesson 5: Definition of Rotation and Basic Properties
 Student Outcomes Students know how to rotate a figure a given degree around a given center. Students know that rotations move lines to lines, rays to rays, segments to segments, and angles to angles. Students
Student Outcomes Students know how to rotate a figure a given degree around a given center. Students know that rotations move lines to lines, rays to rays, segments to segments, and angles to angles. Students
Kinematics of Machines. Brown Hills College of Engineering & Technology
 Introduction: mechanism and machines, kinematic links, kinematic pairs, kinematic chains, plane and space mechanism, kinematic inversion, equivalent linkages, four link planar mechanisms, mobility and
Introduction: mechanism and machines, kinematic links, kinematic pairs, kinematic chains, plane and space mechanism, kinematic inversion, equivalent linkages, four link planar mechanisms, mobility and
Lesson 1: Introduction to Pro/MECHANICA Motion
 Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Collision Detection of Cylindrical Rigid Bodies for Motion Planning
 Proceedings of the 2006 IEEE International Conference on Robotics and Automation Orlando, Florida - May 2006 Collision Detection of Cylindrical Rigid Bodies for Motion Planning John Ketchel Department
Proceedings of the 2006 IEEE International Conference on Robotics and Automation Orlando, Florida - May 2006 Collision Detection of Cylindrical Rigid Bodies for Motion Planning John Ketchel Department
Kinematics of pantograph masts
 Kinematics of pantograph masts B. P. Nagaraj, R. Pandiyan ISRO Satellite Centre, Bangalore, 560 017, India and Ashitava Ghosal Dept. of Mechanical Engineering, Indian Institute of Science, Bangalore 560
Kinematics of pantograph masts B. P. Nagaraj, R. Pandiyan ISRO Satellite Centre, Bangalore, 560 017, India and Ashitava Ghosal Dept. of Mechanical Engineering, Indian Institute of Science, Bangalore 560
Graphic Design & Digital Photography. Photoshop Basics: Working With Selection.
 1 Graphic Design & Digital Photography Photoshop Basics: Working With Selection. What You ll Learn: Make specific areas of an image active using selection tools, reposition a selection marquee, move and
1 Graphic Design & Digital Photography Photoshop Basics: Working With Selection. What You ll Learn: Make specific areas of an image active using selection tools, reposition a selection marquee, move and
Geometry. Topic 1 Transformations and Congruence
 Geometry Topic 1 Transformations and Congruence MAFS.912.G-CO.1.2 Consider the point A at ( 3, 5). A. Find the coordinates of A, the image of A after the transformation: (, ) (, ). B. What type of transformation
Geometry Topic 1 Transformations and Congruence MAFS.912.G-CO.1.2 Consider the point A at ( 3, 5). A. Find the coordinates of A, the image of A after the transformation: (, ) (, ). B. What type of transformation
Sheet Metal Overview. Chapter. Chapter Objectives
 Chapter 1 Sheet Metal Overview This chapter describes the terminology, design methods, and fundamental tools used in the design of sheet metal parts. Building upon these foundational elements of design,
Chapter 1 Sheet Metal Overview This chapter describes the terminology, design methods, and fundamental tools used in the design of sheet metal parts. Building upon these foundational elements of design,
Unit 5: Transformations in the Coordinate Plane
 Unit 5: Transformations in the Coordinate Plane In this unit, students review the definitions of three types of transformations that preserve distance and angle: rotations, reflections, and translations.
Unit 5: Transformations in the Coordinate Plane In this unit, students review the definitions of three types of transformations that preserve distance and angle: rotations, reflections, and translations.
Modelling of mechanical system CREATING OF KINEMATIC CHAINS
 Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
pine cone Ratio = 13:8 or 8:5
 Chapter 10: Introducing Geometry 10.1 Basic Ideas of Geometry Geometry is everywhere o Road signs o Carpentry o Architecture o Interior design o Advertising o Art o Science Understanding and appreciating
Chapter 10: Introducing Geometry 10.1 Basic Ideas of Geometry Geometry is everywhere o Road signs o Carpentry o Architecture o Interior design o Advertising o Art o Science Understanding and appreciating
2D Object Definition (1/3)
") 2D Object Definition (1/3) Lines and Polylines Lines drawn between ordered points to create more complex forms called polylines Same first and last point make closed polyline or polygon Can intersect itself
2D Object Definition (1/3) Lines and Polylines Lines drawn between ordered points to create more complex forms called polylines Same first and last point make closed polyline or polygon Can intersect itself
Math 7, Unit 8: Geometric Figures Notes
 Math 7, Unit 8: Geometric Figures Notes Points, Lines and Planes; Line Segments and Rays s we begin any new topic, we have to familiarize ourselves with the language and notation to be successful. My guess
Math 7, Unit 8: Geometric Figures Notes Points, Lines and Planes; Line Segments and Rays s we begin any new topic, we have to familiarize ourselves with the language and notation to be successful. My guess
Mathematics. Accelerated GSE Algebra I/Geometry A Unit 7: Transformations in the Coordinate Plane
 Georgia Standards of Excellence Frameworks Mathematics Accelerated GSE Algebra I/Geometry A Unit 7: Transformations in the Coordinate Plane These materials are for nonprofit educational purposes only.
Georgia Standards of Excellence Frameworks Mathematics Accelerated GSE Algebra I/Geometry A Unit 7: Transformations in the Coordinate Plane These materials are for nonprofit educational purposes only.
Mathematics. Unit 5: Transformations in the Coordinate Plane
 CCGPS Frameworks Student Edition Mathematics CCGPS Coordinate Algebra Unit 5: Transformations in the Coordinate Plane These materials are for nonprofit educational purposes only. Any other use may constitute
CCGPS Frameworks Student Edition Mathematics CCGPS Coordinate Algebra Unit 5: Transformations in the Coordinate Plane These materials are for nonprofit educational purposes only. Any other use may constitute
7 Modelling and Animating Human Figures. Chapter 7. Modelling and Animating Human Figures. Department of Computer Science and Engineering 7-1
 Modelling and Animating Human Figures 7-1 Introduction Modeling and animating an articulated figure is one of the most formidable tasks that an animator can be faced with. It is especially challenging
Modelling and Animating Human Figures 7-1 Introduction Modeling and animating an articulated figure is one of the most formidable tasks that an animator can be faced with. It is especially challenging
Middle School Geometry. Session 3
 Middle School Geometry Session 3 Topic Transformational Geometry: Tessellations Activity Name Sums of the Measures of Angles of Triangles Do Congruent Triangles Tessellate? Do Congruent Quadrilaterals
Middle School Geometry Session 3 Topic Transformational Geometry: Tessellations Activity Name Sums of the Measures of Angles of Triangles Do Congruent Triangles Tessellate? Do Congruent Quadrilaterals
A Nine- and Twelve-Pointed Star Polygon Design of the Tashkent Scrolls
 Bridges 2011: Mathematics, Music, Art, Architecture, Culture A Nine- and Twelve-Pointed Star Polygon Design of the Tashkent Scrolls B. Lynn Bodner Mathematics Department Cedar Avenue Monmouth University
Bridges 2011: Mathematics, Music, Art, Architecture, Culture A Nine- and Twelve-Pointed Star Polygon Design of the Tashkent Scrolls B. Lynn Bodner Mathematics Department Cedar Avenue Monmouth University
CS 465 Program 4: Modeller
 CS 465 Program 4: Modeller out: 30 October 2004 due: 16 November 2004 1 Introduction In this assignment you will work on a simple 3D modelling system that uses simple primitives and curved surfaces organized
CS 465 Program 4: Modeller out: 30 October 2004 due: 16 November 2004 1 Introduction In this assignment you will work on a simple 3D modelling system that uses simple primitives and curved surfaces organized
Cylinders in Vs An optomechanical methodology Yuming Shen Tutorial for Opti521 November, 2006
 Cylinders in Vs An optomechanical methodology Yuming Shen Tutorial for Opti521 November, 2006 Introduction For rotationally symmetric optical components, a convenient optomechanical approach which is usually
Cylinders in Vs An optomechanical methodology Yuming Shen Tutorial for Opti521 November, 2006 Introduction For rotationally symmetric optical components, a convenient optomechanical approach which is usually
Sum of Exterior Angles of Polygons TEACHER NOTES
 Math Objectives Students will determine that the interior angle of a polygon and an exterior angle of a polygon form a linear pair (i.e., the two angles are supplementary). Students will determine that
Math Objectives Students will determine that the interior angle of a polygon and an exterior angle of a polygon form a linear pair (i.e., the two angles are supplementary). Students will determine that
August 3 - August 31
 Mathematics Georgia Standards of Excellence Geometry Parent Guide Unit 1 A All About Our Unit of Study Transformations in the Coordinate Plane August 3 - August 31 In this unit students will perform transformations
Mathematics Georgia Standards of Excellence Geometry Parent Guide Unit 1 A All About Our Unit of Study Transformations in the Coordinate Plane August 3 - August 31 In this unit students will perform transformations
We can use square dot paper to draw each view (top, front, and sides) of the three dimensional objects:
 of the three dimensional objects:") Unit Eight Geometry Name: 8.1 Sketching Views of Objects When a photo of an object is not available, the object may be drawn on triangular dot paper. This is called isometric paper. Isometric means equal
Unit Eight Geometry Name: 8.1 Sketching Views of Objects When a photo of an object is not available, the object may be drawn on triangular dot paper. This is called isometric paper. Isometric means equal
What Is SimMechanics?
 SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
Math 3315: Geometry Vocabulary Review Human Dictionary: WORD BANK
 Math 3315: Geometry Vocabulary Review Human Dictionary: WORD BANK [acute angle] [acute triangle] [adjacent interior angle] [alternate exterior angles] [alternate interior angles] [altitude] [angle] [angle_addition_postulate]
Math 3315: Geometry Vocabulary Review Human Dictionary: WORD BANK [acute angle] [acute triangle] [adjacent interior angle] [alternate exterior angles] [alternate interior angles] [altitude] [angle] [angle_addition_postulate]
Geometry Assessment. Eligible Texas Essential Knowledge and Skills
 Geometry Assessment Eligible Texas Essential Knowledge and Skills STAAR Geometry Assessment Reporting Category 1: Geometric Structure The student will demonstrate an understanding of geometric structure.
Geometry Assessment Eligible Texas Essential Knowledge and Skills STAAR Geometry Assessment Reporting Category 1: Geometric Structure The student will demonstrate an understanding of geometric structure.
Singularity Analysis of an Extensible Kinematic Architecture: Assur Class N, Order N 1
 David H. Myszka e-mail: dmyszka@udayton.edu Andrew P. Murray e-mail: murray@notes.udayton.edu University of Dayton, Dayton, OH 45469 James P. Schmiedeler The Ohio State University, Columbus, OH 43210 e-mail:
David H. Myszka e-mail: dmyszka@udayton.edu Andrew P. Murray e-mail: murray@notes.udayton.edu University of Dayton, Dayton, OH 45469 James P. Schmiedeler The Ohio State University, Columbus, OH 43210 e-mail:
Theory of Machines Course # 1
 Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
FDM Lightweight Structures DESIGN GUIDE
 FDM Lightweight Structures THE 3D PRINTING SOLUTIONS COMPANY FDM Lightweight Structures Many aerospace and automotive applications require parts with a very high stiffness-to-weight ratio. Because of the
FDM Lightweight Structures THE 3D PRINTING SOLUTIONS COMPANY FDM Lightweight Structures Many aerospace and automotive applications require parts with a very high stiffness-to-weight ratio. Because of the
GDL Toolbox 2 Reference Manual
 Reference Manual Archi-data Ltd. Copyright 2002. New Features Reference Manual New Save GDL command Selected GDL Toolbox elements can be exported into simple GDL scripts. During the export process, the
Reference Manual Archi-data Ltd. Copyright 2002. New Features Reference Manual New Save GDL command Selected GDL Toolbox elements can be exported into simple GDL scripts. During the export process, the
3D Modeling and Design Glossary - Beginner
 3D Modeling and Design Glossary - Beginner Align: to place or arrange (things) in a straight line. To use the Align tool, select at least two objects by Shift left-clicking on them or by dragging a box
3D Modeling and Design Glossary - Beginner Align: to place or arrange (things) in a straight line. To use the Align tool, select at least two objects by Shift left-clicking on them or by dragging a box
Appendix. Correlation to the High School Geometry Standards of the Common Core State Standards for Mathematics
 Appendix Correlation to the High School Geometry Standards of the Common Core State Standards for Mathematics The correlation shows how the activities in Exploring Geometry with The Geometer s Sketchpad
Appendix Correlation to the High School Geometry Standards of the Common Core State Standards for Mathematics The correlation shows how the activities in Exploring Geometry with The Geometer s Sketchpad
ME 321 Kinematics and Dynamics of Machines
 .0 INTRODUCTION ME Kinematics and Dynamics of Machines All Text References in these notes are for: Mechanism Design: Analysis and Synthesis, Volume, Fourth Edition, Erdman, Sandor and Kota, Prentice-Hall,
.0 INTRODUCTION ME Kinematics and Dynamics of Machines All Text References in these notes are for: Mechanism Design: Analysis and Synthesis, Volume, Fourth Edition, Erdman, Sandor and Kota, Prentice-Hall,
Principles of Architectural and Environmental Design EARC 2417 Lecture 2 Forms
 Islamic University-Gaza Faculty of Engineering Architecture Department Principles of Architectural and Environmental Design EARC 2417 Lecture 2 Forms Instructor: Dr. Suheir Ammar 2016 1 FORMS ELEMENTS
Islamic University-Gaza Faculty of Engineering Architecture Department Principles of Architectural and Environmental Design EARC 2417 Lecture 2 Forms Instructor: Dr. Suheir Ammar 2016 1 FORMS ELEMENTS
Translations, Reflections, and Rotations
 Translations, Reflections, and Rotations This photo shows a classic optical illusion called the Necker Cube. It's an example of an impossible object. Optical illusions are often helpful to scientists who
Translations, Reflections, and Rotations This photo shows a classic optical illusion called the Necker Cube. It's an example of an impossible object. Optical illusions are often helpful to scientists who
Course: Geometry Level: Regular Date: 11/2016. Unit 1: Foundations for Geometry 13 Days 7 Days. Unit 2: Geometric Reasoning 15 Days 8 Days
 Geometry Curriculum Chambersburg Area School District Course Map Timeline 2016 Units *Note: unit numbers are for reference only and do not indicate the order in which concepts need to be taught Suggested
Geometry Curriculum Chambersburg Area School District Course Map Timeline 2016 Units *Note: unit numbers are for reference only and do not indicate the order in which concepts need to be taught Suggested
Geometry Sixth Grade
 Standard 6-4: The student will demonstrate through the mathematical processes an understanding of shape, location, and movement within a coordinate system; similarity, complementary, and supplementary
Standard 6-4: The student will demonstrate through the mathematical processes an understanding of shape, location, and movement within a coordinate system; similarity, complementary, and supplementary
Contents COORDINATE METHODS REGRESSION AND CORRELATION
 Contents UNIT 3 UNIT 4 COORDINATE METHODS Lesson 1 A Coordinate Model of a Plane.............. 162 Investigations 1 Representing Geometric Ideas with Coordinates............... 164 2 Reasoning with Slopes
Contents UNIT 3 UNIT 4 COORDINATE METHODS Lesson 1 A Coordinate Model of a Plane.............. 162 Investigations 1 Representing Geometric Ideas with Coordinates............... 164 2 Reasoning with Slopes
ACT Math and Science - Problem Drill 11: Plane Geometry
 ACT Math and Science - Problem Drill 11: Plane Geometry No. 1 of 10 1. Which geometric object has no dimensions, no length, width or thickness? (A) Angle (B) Line (C) Plane (D) Point (E) Polygon An angle
ACT Math and Science - Problem Drill 11: Plane Geometry No. 1 of 10 1. Which geometric object has no dimensions, no length, width or thickness? (A) Angle (B) Line (C) Plane (D) Point (E) Polygon An angle
Geometry A Syllabus. Course Learning Goals (including WA State Standards, Common Core Standards, National Standards):
:") Geometry A Syllabus Credit: one semester (.5) Prerequisites and/or recommended preparation: Completion of Algebra 1 Estimate of hours per week engaged in learning activities: 5 hours of class work per
Geometry A Syllabus Credit: one semester (.5) Prerequisites and/or recommended preparation: Completion of Algebra 1 Estimate of hours per week engaged in learning activities: 5 hours of class work per
DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS
 DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS ALBA PEREZ Robotics and Automation Laboratory University of California, Irvine Irvine, CA 9697 email: maperez@uci.edu AND J. MICHAEL MCCARTHY Department of Mechanical
DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS ALBA PEREZ Robotics and Automation Laboratory University of California, Irvine Irvine, CA 9697 email: maperez@uci.edu AND J. MICHAEL MCCARTHY Department of Mechanical
Approaching an Approximation of Freeform Surfaces by Developable Strips using Apparent Contours.
 Proceedings of Bridges 2013: Mathematics, Music, Art, Architecture, Culture Approaching an Approximation of Freeform Surfaces by Developable Strips using Apparent Contours. Francisco González-Quintial,
Proceedings of Bridges 2013: Mathematics, Music, Art, Architecture, Culture Approaching an Approximation of Freeform Surfaces by Developable Strips using Apparent Contours. Francisco González-Quintial,
Math 7, Unit 08: Geometric Figures Notes
 Math 7, Unit 08: Geometric Figures Notes Points, Lines and Planes; Line Segments and Rays s we begin any new topic, we have to familiarize ourselves with the language and notation to be successful. My
Math 7, Unit 08: Geometric Figures Notes Points, Lines and Planes; Line Segments and Rays s we begin any new topic, we have to familiarize ourselves with the language and notation to be successful. My
Simulation Model for Coupler Curve Generation using Five Bar Planar Mechanism With Rotation Constraint
 Simulation Model for Coupler Curve Generation using Five Bar Planar Mechanism With Rotation Constraint A. K. Abhyankar, S.Y.Gajjal Department of Mechanical Engineering, NBN Sinhgad School of Engineering,
Simulation Model for Coupler Curve Generation using Five Bar Planar Mechanism With Rotation Constraint A. K. Abhyankar, S.Y.Gajjal Department of Mechanical Engineering, NBN Sinhgad School of Engineering,
STANDARDS OF LEARNING CONTENT REVIEW NOTES GEOMETRY. 3 rd Nine Weeks,
 STANDARDS OF LEARNING CONTENT REVIEW NOTES GEOMETRY 3 rd Nine Weeks, 2016-2017 1 OVERVIEW Geometry Content Review Notes are designed by the High School Mathematics Steering Committee as a resource for
STANDARDS OF LEARNING CONTENT REVIEW NOTES GEOMETRY 3 rd Nine Weeks, 2016-2017 1 OVERVIEW Geometry Content Review Notes are designed by the High School Mathematics Steering Committee as a resource for
Side-by-Side Comparison of the Texas Educational Knowledge and Skills (TEKS) and Louisiana Grade Level Expectations (GLEs) MATHEMATICS: Geometry
 and Louisiana Grade Level Expectations (GLEs) MATHEMATICS: Geometry") Side-by-Side Comparison of the Texas Educational Knowledge and Skills (TEKS) and Louisiana Grade Level Expectations (GLEs) MATHEMATICS: Geometry TEKS Comments Louisiana GLE (G.1) Geometric Structure. The
Side-by-Side Comparison of the Texas Educational Knowledge and Skills (TEKS) and Louisiana Grade Level Expectations (GLEs) MATHEMATICS: Geometry TEKS Comments Louisiana GLE (G.1) Geometric Structure. The
Equipment Support Structures
 Equipment Support Structures Overview Conventions What's New? Getting Started Setting Up Your Session Creating a Simple Structural Frame Creating Non-uniform Columns Creating Plates with Openings Bracing
Equipment Support Structures Overview Conventions What's New? Getting Started Setting Up Your Session Creating a Simple Structural Frame Creating Non-uniform Columns Creating Plates with Openings Bracing
MAE 455 COMPUTER-AIDED DESIGN AND DRAFTING MIDTERM EXAM PRACTICE QUESTIONS. Name: You are allowed one sheet of notes.
 47 MAE 455 COMPUTER-AIDED DESIGN AND DRAFTING MIDTERM EXAM PRACTICE QUESTIONS Name: You are allowed one sheet of notes. 1. What constraints could be added to fully constrain the wireframe shown? Include
47 MAE 455 COMPUTER-AIDED DESIGN AND DRAFTING MIDTERM EXAM PRACTICE QUESTIONS Name: You are allowed one sheet of notes. 1. What constraints could be added to fully constrain the wireframe shown? Include
Animation. CS 465 Lecture 22
 Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
XPEL DAP SUPPORT. DAP Tool List & Overview DESCRIPTION ICON/TOOL (SHORTCUT)
") Pointer (S) Left-click on individual entities to add them to the current selection (selected entities will turn red). If the entity selected is a member of a group, the entire group will be added to the
Pointer (S) Left-click on individual entities to add them to the current selection (selected entities will turn red). If the entity selected is a member of a group, the entire group will be added to the
CCGPS UNIT 5 Semester 2 COORDINATE ALGEBRA Page 1 of 38. Transformations in the Coordinate Plane
 CCGPS UNIT 5 Semester 2 COORDINATE ALGEBRA Page 1 of 38 Transformations in the Coordinate Plane Name: Date: MCC9-12.G.CO.1 Know precise definitions of angle, circle, perpendicular line, parallel line,
CCGPS UNIT 5 Semester 2 COORDINATE ALGEBRA Page 1 of 38 Transformations in the Coordinate Plane Name: Date: MCC9-12.G.CO.1 Know precise definitions of angle, circle, perpendicular line, parallel line,
8. The triangle is rotated around point D to create a new triangle. This looks like a rigid transformation.
 2.1 Transformations in the Plane 1. True 2. True 3. False 4. False 5. True 6. False 7. True 8. The triangle is rotated around point D to create a new triangle. This looks like a rigid transformation. 9.
2.1 Transformations in the Plane 1. True 2. True 3. False 4. False 5. True 6. False 7. True 8. The triangle is rotated around point D to create a new triangle. This looks like a rigid transformation. 9.
7. 2 More Things Under. Construction. A Develop Understanding Task
 7 Construction A Develop Understanding Task Like a rhombus, an equilateral triangle has three congruent sides. Show and describe how you might locate the third vertex point on an equilateral triangle,
7 Construction A Develop Understanding Task Like a rhombus, an equilateral triangle has three congruent sides. Show and describe how you might locate the third vertex point on an equilateral triangle,
Three-Dimensional Figures
 Three-Dimensional Figures The number of coins created by the U.S. Mint changes each year. In the year 2000, there were about 28 billion coins created and about half of them were pennies!.1 Whirlygigs for
Three-Dimensional Figures The number of coins created by the U.S. Mint changes each year. In the year 2000, there were about 28 billion coins created and about half of them were pennies!.1 Whirlygigs for
Agile Mind Geometry Scope and Sequence, Common Core State Standards for Mathematics
 Students began their study of geometric concepts in middle school mathematics. They studied area, surface area, and volume and informally investigated lines, angles, and triangles. Students in middle school
Students began their study of geometric concepts in middle school mathematics. They studied area, surface area, and volume and informally investigated lines, angles, and triangles. Students in middle school
Autodesk Inventor 6 Essentials Instructor Guide Chapter Four: Creating Placed Features Chapter Outline This chapter provides instruction on the follow
 Chapter Four: Creating Placed Features Chapter Outline This chapter provides instruction on the following topics and provides exercises for students to practice their skills. Day Two Topic: How to create
Chapter Four: Creating Placed Features Chapter Outline This chapter provides instruction on the following topics and provides exercises for students to practice their skills. Day Two Topic: How to create
Using the Best of Both!
 Using the Best of Both! A Guide to Using Connected Mathematics 2 with Prentice Hall Mathematics Courses 1, 2, 3 2012, and Algebra Readiness MatBro111707BestOfBothPH10&CMP2.indd 1 6/7/11 11:59 AM Using
Using the Best of Both! A Guide to Using Connected Mathematics 2 with Prentice Hall Mathematics Courses 1, 2, 3 2012, and Algebra Readiness MatBro111707BestOfBothPH10&CMP2.indd 1 6/7/11 11:59 AM Using
Equipment Support Structures
 Page 1 Equipment Support Structures Preface Using This Guide Where to Find More Information Conventions What's New? Getting Started Setting Up Your Session Creating a Simple Structural Frame Creating Non-uniform
Page 1 Equipment Support Structures Preface Using This Guide Where to Find More Information Conventions What's New? Getting Started Setting Up Your Session Creating a Simple Structural Frame Creating Non-uniform
MODELLING AND MOTION ANALYSIS OF FIVE-BAR 5R MECHANISM
 Int. J. of Applied Mechanics and Engineering, 1, vol.19, No., pp.677-686 DOI: 1.78/ijame-1-6 MODELLING AND MOTION ANALYSIS OF FIVE-BAR 5R MECHANISM Z. BUDNIAK * and T. BIL Faculty of Mechanical Engineering
Int. J. of Applied Mechanics and Engineering, 1, vol.19, No., pp.677-686 DOI: 1.78/ijame-1-6 MODELLING AND MOTION ANALYSIS OF FIVE-BAR 5R MECHANISM Z. BUDNIAK * and T. BIL Faculty of Mechanical Engineering
Investigating Properties of Kites
 Investigating Properties of Kites Definition: Kite a quadrilateral with two distinct pairs of consecutive equal sides (Figure 1). Construct and Investigate: 1. Determine three ways to construct a kite
Investigating Properties of Kites Definition: Kite a quadrilateral with two distinct pairs of consecutive equal sides (Figure 1). Construct and Investigate: 1. Determine three ways to construct a kite
UNIT 1: TRANSFORMATIONS IN THE COORDINATE PLANE
 UNIT 1: TRANSFORMATIONS IN THE COORDINATE PLANE Unit 1: Transformations in the Coordinate Plane In this unit, students review the definitions of three types of transformations that preserve distance and
UNIT 1: TRANSFORMATIONS IN THE COORDINATE PLANE Unit 1: Transformations in the Coordinate Plane In this unit, students review the definitions of three types of transformations that preserve distance and
Large. Structures Pack. Cautionary and Warning Statement
 Large Structures Pack Cautionary and Warning Statement This kit is designed and intended for educational purposes only. Use only under the direct supervision of an adult who has read and understood the
Large Structures Pack Cautionary and Warning Statement This kit is designed and intended for educational purposes only. Use only under the direct supervision of an adult who has read and understood the
The Eleven Pointed Star Polygon Design of the Topkapı Scroll
 Bridges 2009: Mathematics, Music, Art, Architecture, Culture The Eleven Pointed Star Polygon Design of the Topkapı Scroll B. Lynn Bodner Mathematics Department Cedar Avenue Monmouth University West Long
Bridges 2009: Mathematics, Music, Art, Architecture, Culture The Eleven Pointed Star Polygon Design of the Topkapı Scroll B. Lynn Bodner Mathematics Department Cedar Avenue Monmouth University West Long
West Windsor-Plainsboro Regional School District Basic Geometry Grades 9-12
 West Windsor-Plainsboro Regional School District Basic Geometry Grades 9-12 Unit 1: Basics of Geometry Content Area: Mathematics Course & Grade Level: Basic Geometry, 9 12 Summary and Rationale This unit
West Windsor-Plainsboro Regional School District Basic Geometry Grades 9-12 Unit 1: Basics of Geometry Content Area: Mathematics Course & Grade Level: Basic Geometry, 9 12 Summary and Rationale This unit
Geometry. Set 1. Daily Practice And Answer Keys
 Geometry Set 1 Daily Practice And Answer Keys Website: http://alex.state.al.us/ccrs/node/314 Name Date Daily Practice Geometry DAY 1 1. The figure above is shaded on the top side and white on the under
Geometry Set 1 Daily Practice And Answer Keys Website: http://alex.state.al.us/ccrs/node/314 Name Date Daily Practice Geometry DAY 1 1. The figure above is shaded on the top side and white on the under
Geometry Practice. 1. Angles located next to one another sharing a common side are called angles.
 Geometry Practice Name 1. Angles located next to one another sharing a common side are called angles. 2. Planes that meet to form right angles are called planes. 3. Lines that cross are called lines. 4.
Geometry Practice Name 1. Angles located next to one another sharing a common side are called angles. 2. Planes that meet to form right angles are called planes. 3. Lines that cross are called lines. 4.