Segmentation and Grouping
|
|
|
- Evan King
- 6 years ago
- Views:
Transcription
1 Segmentation and Grouping


2 How and what do we see?
3 Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation ' How do we model the shape, color and appearance of natural objects? ' Matching ' How do we compare these models against images?
4 Polyhedral objects ' Representation ' Graphs of vertices connected by links corresponding to the corners and edges of the polyhedron, respectively. ' Metric information associated with the vertices of the graph ' Matching ' Pose estimation ' Segmentation ' How do we find the projections of the corners of the polyhedron in the image
5 Combinatorics of polyhedra recognition ' 4 - point perspective solution ' unique solution for 6 pose parameters ' computational complexity of n 4 m 4 ' 3 - point perspective solution ' generally two solutions per triangle pair, but sometimes more ' reduced complexity of n 3 m 3
6 Reducing the combinatorics of pose estimation ' Problem # 1: we are looking for an object in an image but the image does not contain the object ' only discover this after comparing all n 4 quadruples of image features against all m 4 quadruples of object features. ' How can we reduce the number of matches? ' consider only quadruples of object features that are ' simultaneously visible - extensive preprocessing ' diameter 2 subgraphs of the object graph ' but in some images no such subgraphs might be visible
7 Reducing the combinatorics of pose estimation ' Reducing the number of matches ' consider only quadruples of image features that ' are connected by edges ' are close to one another ' Problem # 2: Image contains instances of MANY objects with occlusions ' Generally, try to group the image junctions into sets that are probably from a single object, and then only construct quadruples from within a single group
8 Image segmentation ' Definition 1: Partition the image into connected subsets that maximize some uniformity criteria. ' Definition 2: Identify possibly overlapping but maximal connected subsets that satisfy some uniformity criterion.
9 Approaches to segmentation ' Edge detection ' Biological systems are sensitive to color and texture edges ' Detect and identify collections of edges that outline an object or are likely to be part of the outline of a single object ' Region detection ' Identify (possibly multiple) partitions of the image into uniform regions
10 Edge detection ' Gradient based edge detection ' Edge detection by function fitting ' Second derivative edge detectors ' Edge grouping

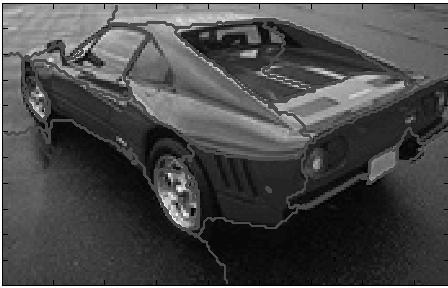
11 Example images
12 1-D edge detection ' An ideal edge is a step function I(x) I (x) x x
13 1-D edge detection I (x) x ' The first derivative of I(x) has a peak at the edge ' The second derivative of I(x) has a zero crossing at the edge
14 1-D edge detection ' More realistically, image edges are blurred and the regions that meet at those edges have noise or variations in intensity. ' blur - high first derivatives near edges ' noise - high first derivatives within regions that meet at edges I(x) I (x) x x
15 Edge detection in 2-D ' Let f(x,y) be the image intensity function. It has derivatives in all directions ' the gradient is a vector whose first component is the direction in which the first derivative is highest, and whose second component is the magnitude of the first derivative in that direction. ' If f is continuous and differentiable, then its gradient can be determined from the directional derivatives in any two orthogonal directions magnitude = ' direction = f [( ) x 2 f + ( ) y f tan 1 ( f 2 ] y ) x 1/ 2
16 Edge detection in 2-D ' With a digital image, the partial derivatives are replaced by finite differences: ' x f = f(x,y) - f(x-1, y) ' y f = f(x,y) - f(x, y-1) ' Alternatives are: ' 2x f = f(x+1,y) - f(x-1,y) ' 2y f = f(x,y+1) - f(x,y-1) ' Robert s gradient ' + f = f(x+1,y+1) - f(x,y) ' - f = f(x,y+1) - f(x+1, y)
17 Edge detection in 2-D ' How do we combine the directional derivatives to compute the gradient magnitude? ' use the root mean square (RMS) as in the continuous case ' take the maximum absolute value of the directional derivatives
18 Combining smoothing and differentiation - fixed scale ' Local operators like the Roberts give high responses to any intensity variation ' local surface texture ' If the picture is first smoothed by an averaging process, then these local variations are removed and what remains are the prominent edges ' smoothing is blurring, and details are removed ' Example f 2x2 (x,y) = 1/4[f(x,y) + f(x+1,y) + f(x,y+1) + f(x+1,y+1)]
19 Smoothing - basic problems ' What function should be used to smooth or average the image before differentiation? ' box filters or uniform smoothing ' easy to compute ' for large smoothing neighborhoods assigns too much weight to points far from an edge ' Gaussian, or exponential, smoothing (1/2π σ )e -(x2 +y 2 )/2σ 2
20 Smoothing and convolution ' The convolution of two functions, f(x) and g(x) is defined as h(x) = g(x')f (x x')dx' = g(x) f (x) ' When the functions f and g are discrete and when g is nonzero only over a finite range [-n,n] then this integral is replaced by the following summation: n h(i) = g( j) f (i + j) j = n g f
21 Smoothing and convolution ' These integrals and summations extend simply to functions of two variables: n n k = n l = n h(i, j) = f (i, j) g = g(k,l) f (i + k, j + l) ' Convolution computes the weighted sum of the gray levels in each nxn neighborhood of the image, f, using the matrix of weights g. ' Convolution is a so-called linear operator because ' g*(af 1 + bf 2 ) = a(g*f 1 ) + b(g*f 2 )
22 Gaussian smoothing ' Advantages of Gaussian filtering ' rotationally symmetric (for large filters) ' filter weights decrease monotonically from central peak, giving most weight to central pixels ' Simple and intuitive relationship between size of σ and size of objects whose edges will be detected in image. ' The gaussian is separable: 2 e (x +y 2 ) 2σ 2 = e x2 2σ 2 e y2 2σ 2
23 Advantage of seperability ' First convolve the image with a one dimensional horizontal filter ' Then convolve the result of the first convolution with a one dimensional vertical filter ' For a kxk Gaussian filter, 2D convolution requires k 2 operations per pixel ' But using the separable filters, we reduce this to 2k operations per pixel.
24 Advantages of Gaussians ' Convolution of a Gaussian with itself is another Gaussian ' so we can first smooth an image with a small Gaussian ' then, we convolve that smoothed image with another small Gaussian and the result is equivalent to smoother the original image with a larger Gaussian. ' If we smooth an image with a Gaussian having sd σ twice, then we get the same result as smoothing the image with a Gaussian having standard deviation (2σ) 1/2
25 Combining smoothing and differentiation - fixed scale ' Non-maxima supression - Retain a point as an edge point if: ' its gradient magnitude is higher than a threshold ' its gradient magnitude is a local maxima in the gradient direction simple thresholding will compute thick edges
26 Summary of basic edge detection steps ' Smooth the image to reduce the effects of local intensity variations ' choice of smoothing operator practically important ' Differentiate the smoothed image using a digital gradient operator that assigns a magnitude and direction of the gradient at each pixel ' Threshold the gradient magnitude to eliminate low contrast edges
27 Summary of basic edge detection steps ' Apply a nonmaxima suppression step to thin the edges to single pixel wide edges ' the smoothing will produce an image in which the contrast at an edge is spread out in the neighborhood of the edge ' thresholding operation will produce thick edges
28 The scale-space problem ' Usually, any single choice of σ does not produce a good edge map ' a large σ will produce edges form only the largest objects, and they will not accurately delineate the object because the smoothing reduces shape detail ' a small σ will produce many edges and very jagged boundaries of many objects. ' Scale-space approaches ' detect edges at a range of scales [σ 1, σ 2 ] ' combine the resulting edge maps ' trace edges detected using large σ down through scale space to obtain more accurate spatial localization.
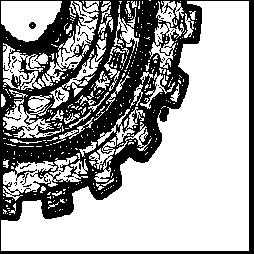
29 Examples Gear image 3x3 Gradient magnitude
30 Examples High threshold Medium threshold
31 Examples low threshold
32 Examples Smoothed 5x5 Gaussian 3x3 gradient magnitude
33 Examples

34 Examples smoothed 15x15 Gaussian 3x3 gradient magnitude
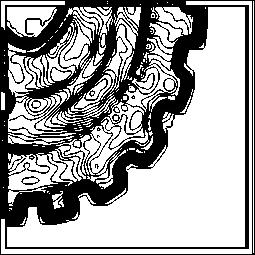
35 Examples
36 Laplacian edge detectors ' Directional second derivative in direction of gradient has a zero crossing at gradient maxima ' Can approximate directional second derivative with Laplacian 2 f x 2 + ' Its digital approximation is ' 2 f(x,y) = [f(x+1,y) + f(x-1,y) + f(x,y+1) + f(x,y-1)] - 4 f(x,y) = [f(x+1,y) - f(x,y)] - [f(x,y) - f(x- 1,y)] + [f(x,y+1)-f(x,y)] - [f(x,y) - f(x,y-1)] 2 f y
37 Laplacian edge detectors ' Laplacians are also combined with smoothing for edge detectors ' Take the Laplacian of a Gaussian smoothed image - called the Mexican Hat operator or DoG (Difference of Gaussians) ' Locate the zero-crossing of the operator ' these are pixels whose DoG is positive and which have neighbor s whose DoG is negative or zero ' Usually, measure the gradient or directional first derivatives at these points to eliminate low contrast edges.

38 Laplacian of Gaussian or Mexican Hat

39 Laplacian of Gaussian 5x5 Mexican Hat - Laplacian of Gaussian Zero crossings


40 Laplacian of Gaussian 13 x 13 Mexican hat zero crossings
41 Edge linking and following ' Group edge pixels into chains and chains into large pieces of object boundary. ' can use the shapes of long edge chains in recognition ' Curvature high curvature points are possible corners ' Junctions where individual chains meet
42 Grouping chains ' How do we know if two chains should be combined into a single, longer chain ' Edge detector leaves gaps in edges due to low contrast, complex image structure where more than two regions meet ' More generally, can we optimally partition the set of chains into groups that maximize some reasonable criteria ' Good continuation across gaps ' Closure ' Resistance to noise (small, irrelevant chains)
43 Segmentation II- Region analysis ' Partition images into elementary regions ' Pixels ' Connected components of constant brightness/color ' Build region adjacency graph for regions ' Edge weights reflect similarity of regions that meet at that edge ' Reduce the graph to a smaller number of regions ' Merging eliminate weak edges ' Cutting partition graph into subgraphs
44 Region merging ' Best first region merging ' Eliminate the weakest edge in the graph ' Compute new properties of merged region ' Average color ' Texture statistics ' Update edge weights for adjacent regions ' For a graph with n regions initially, will create n-1 new regions
45 Graph splitting - cuts ' Let A,B be a partition of the nodes in a weighted graph G. cut( A, B) = u A, v B w( u, v) ' Optimal bi-partitioning of a graph is the one that minimizes this cut ' Efficient algorithms for finding minimal cuts ' But minimum cuts favor small sets of isolated nodes
46 Minimal cuts Min cut Desired cut
47 Normalized cuts ' Compute the cut cost as a fraction of the total edge connections to all the nodes in the graph: Ncut( A, B) = cut( A, B) assoc( A, V ) + cut( A, B) assoc( B, V ) assoc( A, V ) = u A, t V cut( u, t)
48 Normalized cuts ' Finding the cut which minimizes Ncut is an NP complete problem ' But there is a way to obtain an approximate solution by constructing a matrix from the graph and finding the eigenvectors and eigenvalues of that matrix ' See Shi and Malik, IEEE T-PAMI, August 2000.

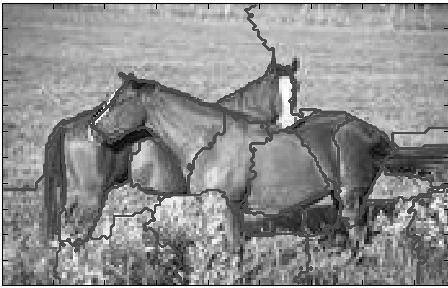
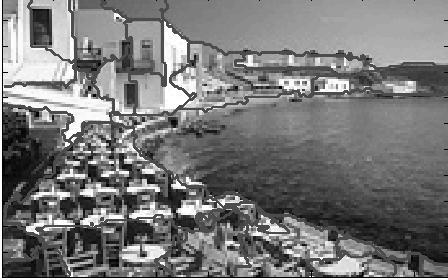
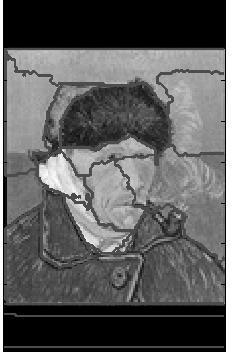
49 Examples
50

51
How and what do we see? Segmentation and Grouping. Fundamental Problems. Polyhedral objects. Reducing the combinatorics of pose estimation
 Segmentation and Grouping Fundamental Problems ' Focus of attention, or grouping ' What subsets of piels do we consider as possible objects? ' All connected subsets? ' Representation ' How do we model
Segmentation and Grouping Fundamental Problems ' Focus of attention, or grouping ' What subsets of piels do we consider as possible objects? ' All connected subsets? ' Representation ' How do we model
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS534: Introduction to Computer Vision Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Computer Vision I. Announcement. Corners. Edges. Numerical Derivatives f(x) Edge and Corner Detection. CSE252A Lecture 11
 Edge and Corner Detection. CSE252A Lecture 11") Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Filtering Images. Contents
 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Biomedical Image Analysis. Point, Edge and Line Detection
 Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Image Processing. BITS Pilani. Dr Jagadish Nayak. Dubai Campus
 Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
Digital Image Processing. Image Enhancement - Filtering
 Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Computer Vision I. Announcements. Fourier Tansform. Efficient Implementation. Edge and Corner Detection. CSE252A Lecture 13.
 Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Edge detection. Stefano Ferrari. Università degli Studi di Milano Elaborazione delle immagini (Image processing I)
") Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Lecture 4: Image Processing
 Lecture 4: Image Processing Definitions Many graphics techniques that operate only on images Image processing: operations that take images as input, produce images as output In its most general form, an
Lecture 4: Image Processing Definitions Many graphics techniques that operate only on images Image processing: operations that take images as input, produce images as output In its most general form, an
Lecture 7: Most Common Edge Detectors
 #1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
#1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Edge detection. Gradient-based edge operators
 Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
EECS490: Digital Image Processing. Lecture #19
 Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
CS 534: Computer Vision Segmentation II Graph Cuts and Image Segmentation
 CS 534: Computer Vision Segmentation II Graph Cuts and Image Segmentation Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation II - 1 Outlines What is Graph cuts Graph-based clustering
CS 534: Computer Vision Segmentation II Graph Cuts and Image Segmentation Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation II - 1 Outlines What is Graph cuts Graph-based clustering
What is an edge? Paint. Depth discontinuity. Material change. Texture boundary
 EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
Filtering and Enhancing Images
 KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
Ulrik Söderström 16 Feb Image Processing. Segmentation
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Image Processing. Traitement d images. Yuliya Tarabalka Tel.
 Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
Local Image preprocessing (cont d)
") Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Normalized cuts and image segmentation
 Normalized cuts and image segmentation Department of EE University of Washington Yeping Su Xiaodan Song Normalized Cuts and Image Segmentation, IEEE Trans. PAMI, August 2000 5/20/2003 1 Outline 1. Image
Normalized cuts and image segmentation Department of EE University of Washington Yeping Su Xiaodan Song Normalized Cuts and Image Segmentation, IEEE Trans. PAMI, August 2000 5/20/2003 1 Outline 1. Image
Image features. Image Features
 Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Edge and Texture. CS 554 Computer Vision Pinar Duygulu Bilkent University
 Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Image Analysis - Lecture 5
 Texture Segmentation Clustering Review Image Analysis - Lecture 5 Texture and Segmentation Magnus Oskarsson Lecture 5 Texture Segmentation Clustering Review Contents Texture Textons Filter Banks Gabor
Texture Segmentation Clustering Review Image Analysis - Lecture 5 Texture and Segmentation Magnus Oskarsson Lecture 5 Texture Segmentation Clustering Review Contents Texture Textons Filter Banks Gabor
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Edge detection. Goal: Identify sudden. an image. Ideal: artist s line drawing. object-level knowledge)
") Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Line, edge, blob and corner detection
 Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Lecture: Edge Detection
 CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
Edge Detection. CSE 576 Ali Farhadi. Many slides from Steve Seitz and Larry Zitnick
 Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 14 Edge detection What will we learn? What is edge detection and why is it so important to computer vision? What are the main edge detection techniques
Practical Image and Video Processing Using MATLAB Chapter 14 Edge detection What will we learn? What is edge detection and why is it so important to computer vision? What are the main edge detection techniques
Comparison between Various Edge Detection Methods on Satellite Image
 Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
EE 701 ROBOT VISION. Segmentation
 EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
Operators-Based on Second Derivative double derivative Laplacian operator Laplacian Operator Laplacian Of Gaussian (LOG) Operator LOG
 Operator LOG") Operators-Based on Second Derivative The principle of edge detection based on double derivative is to detect only those points as edge points which possess local maxima in the gradient values. Laplacian
Operators-Based on Second Derivative The principle of edge detection based on double derivative is to detect only those points as edge points which possess local maxima in the gradient values. Laplacian
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
COMPARATIVE STUDY OF IMAGE EDGE DETECTION ALGORITHMS
 COMPARATIVE STUDY OF IMAGE EDGE DETECTION ALGORITHMS Shubham Saini 1, Bhavesh Kasliwal 2, Shraey Bhatia 3 1 Student, School of Computing Science and Engineering, Vellore Institute of Technology, India,
COMPARATIVE STUDY OF IMAGE EDGE DETECTION ALGORITHMS Shubham Saini 1, Bhavesh Kasliwal 2, Shraey Bhatia 3 1 Student, School of Computing Science and Engineering, Vellore Institute of Technology, India,
Edge Detection. CS664 Computer Vision. 3. Edges. Several Causes of Edges. Detecting Edges. Finite Differences. The Gradient
 Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
Edge Detection CS664 Computer Vision. Edges Convert a gray or color image into set of curves Represented as binary image Capture properties of shapes Dan Huttenlocher Several Causes of Edges Sudden changes
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Outlines. Medical Image Processing Using Transforms. 4. Transform in image space
 Medical Image Processing Using Transforms Hongmei Zhu, Ph.D Department of Mathematics & Statistics York University hmzhu@yorku.ca Outlines Image Quality Gray value transforms Histogram processing Transforms
Medical Image Processing Using Transforms Hongmei Zhu, Ph.D Department of Mathematics & Statistics York University hmzhu@yorku.ca Outlines Image Quality Gray value transforms Histogram processing Transforms
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
Image Processing
 Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Neighborhood operations
 Neighborhood operations Generate an output pixel on the basis of the pixel and its neighbors Often involve the convolution of an image with a filter kernel or mask g ( i, j) = f h = f ( i m, j n) h( m,
Neighborhood operations Generate an output pixel on the basis of the pixel and its neighbors Often involve the convolution of an image with a filter kernel or mask g ( i, j) = f h = f ( i m, j n) h( m,
Solution: filter the image, then subsample F 1 F 2. subsample blur subsample. blur
 Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
PERFORMANCE ANALYSIS OF CANNY AND OTHER COMMONLY USED EDGE DETECTORS Sandeep Dhawan Director of Technology, OTTE, NEW YORK
 International Journal of Science, Environment and Technology, Vol. 3, No 5, 2014, 1759 1766 ISSN 2278-3687 (O) PERFORMANCE ANALYSIS OF CANNY AND OTHER COMMONLY USED EDGE DETECTORS Sandeep Dhawan Director
International Journal of Science, Environment and Technology, Vol. 3, No 5, 2014, 1759 1766 ISSN 2278-3687 (O) PERFORMANCE ANALYSIS OF CANNY AND OTHER COMMONLY USED EDGE DETECTORS Sandeep Dhawan Director
Scott Smith Advanced Image Processing March 15, Speeded-Up Robust Features SURF
 Scott Smith Advanced Image Processing March 15, 2011 Speeded-Up Robust Features SURF Overview Why SURF? How SURF works Feature detection Scale Space Rotational invariance Feature vectors SURF vs Sift Assumptions
Scott Smith Advanced Image Processing March 15, 2011 Speeded-Up Robust Features SURF Overview Why SURF? How SURF works Feature detection Scale Space Rotational invariance Feature vectors SURF vs Sift Assumptions
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Announcements. Edges. Last Lecture. Gradients: Numerical Derivatives f(x) Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10
 Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10") Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
CS 4495 Computer Vision. Linear Filtering 2: Templates, Edges. Aaron Bobick. School of Interactive Computing. Templates/Edges
 CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
Image Segmentation. Srikumar Ramalingam School of Computing University of Utah. Slides borrowed from Ross Whitaker
 Image Segmentation Srikumar Ramalingam School of Computing University of Utah Slides borrowed from Ross Whitaker Segmentation Semantic Segmentation Indoor layout estimation What is Segmentation? Partitioning
Image Segmentation Srikumar Ramalingam School of Computing University of Utah Slides borrowed from Ross Whitaker Segmentation Semantic Segmentation Indoor layout estimation What is Segmentation? Partitioning
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Prof. Feng Liu. Winter /15/2019
 Prof. Feng Liu Winter 2019 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/15/2019 Last Time Filter 2 Today More on Filter Feature Detection 3 Filter Re-cap noisy image naïve denoising Gaussian blur better
Prof. Feng Liu Winter 2019 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/15/2019 Last Time Filter 2 Today More on Filter Feature Detection 3 Filter Re-cap noisy image naïve denoising Gaussian blur better
SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES
 SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES 1 B.THAMOTHARAN, 2 M.MENAKA, 3 SANDHYA VAIDYANATHAN, 3 SOWMYA RAVIKUMAR 1 Asst. Prof.,
SURVEY ON IMAGE PROCESSING IN THE FIELD OF DE-NOISING TECHNIQUES AND EDGE DETECTION TECHNIQUES ON RADIOGRAPHIC IMAGES 1 B.THAMOTHARAN, 2 M.MENAKA, 3 SANDHYA VAIDYANATHAN, 3 SOWMYA RAVIKUMAR 1 Asst. Prof.,
CS 490: Computer Vision Image Segmentation: Thresholding. Fall 2015 Dr. Michael J. Reale
 CS 490: Computer Vision Image Segmentation: Thresholding Fall 205 Dr. Michael J. Reale FUNDAMENTALS Introduction Before we talked about edge-based segmentation Now, we will discuss a form of regionbased
CS 490: Computer Vision Image Segmentation: Thresholding Fall 205 Dr. Michael J. Reale FUNDAMENTALS Introduction Before we talked about edge-based segmentation Now, we will discuss a form of regionbased
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Image gradients and edges April 11 th, 2017
 4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Edge Detection (with a sidelight introduction to linear, associative operators). Images
. Images") Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
EN1610 Image Understanding Lab # 3: Edges
 EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
Concepts in. Edge Detection
 Concepts in Edge Detection Dr. Sukhendu Das Deptt. of Computer Science and Engg., Indian Institute of Technology, Madras Chennai 600036, India. http://www.cs.iitm.ernet.in/~sdas Email: sdas@iitm.ac.in
Concepts in Edge Detection Dr. Sukhendu Das Deptt. of Computer Science and Engg., Indian Institute of Technology, Madras Chennai 600036, India. http://www.cs.iitm.ernet.in/~sdas Email: sdas@iitm.ac.in
Image gradients and edges April 10 th, 2018
 Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Normalized Graph cuts. by Gopalkrishna Veni School of Computing University of Utah
 Normalized Graph cuts by Gopalkrishna Veni School of Computing University of Utah Image segmentation Image segmentation is a grouping technique used for image. It is a way of dividing an image into different
Normalized Graph cuts by Gopalkrishna Veni School of Computing University of Utah Image segmentation Image segmentation is a grouping technique used for image. It is a way of dividing an image into different
What Are Edges? Lecture 5: Gradients and Edge Detection. Boundaries of objects. Boundaries of Lighting. Types of Edges (1D Profiles)
") What Are Edges? Simple answer: discontinuities in intensity. Lecture 5: Gradients and Edge Detection Reading: T&V Section 4.1 and 4. Boundaries of objects Boundaries of Material Properties D.Jacobs, U.Maryland
What Are Edges? Simple answer: discontinuities in intensity. Lecture 5: Gradients and Edge Detection Reading: T&V Section 4.1 and 4. Boundaries of objects Boundaries of Material Properties D.Jacobs, U.Maryland
A Robust Method for Circle / Ellipse Extraction Based Canny Edge Detection
 International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 5, May 2015, PP 49-57 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) A Robust Method for Circle / Ellipse
International Journal of Research Studies in Science, Engineering and Technology Volume 2, Issue 5, May 2015, PP 49-57 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) A Robust Method for Circle / Ellipse
Image processing. Reading. What is an image? Brian Curless CSE 457 Spring 2017
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. [online handout] Image processing Brian Curless CSE 457 Spring 2017 1 2 What is an
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. [online handout] Image processing Brian Curless CSE 457 Spring 2017 1 2 What is an
6.801/866. Segmentation and Line Fitting. T. Darrell
 6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
Texture. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors
 Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Chapter 10: Image Segmentation. Office room : 841
 Chapter 10: Image Segmentation Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cn Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Contents Definition and methods classification
Chapter 10: Image Segmentation Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cn Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Contents Definition and methods classification
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Edge Detection CSC 767
 Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
Segmentation. Bottom Up Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Bottom Up Segmentation 1 Segmentation as clustering Depending on what we choose as the feature space, we can group pixels in different ways. Grouping
Segmentation Bottom up Segmentation Semantic Segmentation Bottom Up Segmentation 1 Segmentation as clustering Depending on what we choose as the feature space, we can group pixels in different ways. Grouping
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Image Enhancement in Spatial Domain (Chapter 3)
") Image Enhancement in Spatial Domain (Chapter 3) Yun Q. Shi shi@njit.edu Fall 11 Mask/Neighborhood Processing ECE643 2 1 Point Processing ECE643 3 Image Negatives S = (L 1) - r (3.2-1) Point processing
Image Enhancement in Spatial Domain (Chapter 3) Yun Q. Shi shi@njit.edu Fall 11 Mask/Neighborhood Processing ECE643 2 1 Point Processing ECE643 3 Image Negatives S = (L 1) - r (3.2-1) Point processing
Edge Detection. CSC320: Introduction to Visual Computing Michael Guerzhoy. René Magritte, Decalcomania. Many slides from Derek Hoiem, Robert Collins
 Edge Detection René Magritte, Decalcomania Many slides from Derek Hoiem, Robert Collins CSC320: Introduction to Visual Computing Michael Guerzhoy Discontinuities in Intensity Source: Robert Collins Origin
Edge Detection René Magritte, Decalcomania Many slides from Derek Hoiem, Robert Collins CSC320: Introduction to Visual Computing Michael Guerzhoy Discontinuities in Intensity Source: Robert Collins Origin
Adaptative Elimination of False Edges for First Order Detectors
 Adaptative Elimination of False Edges for First Order Detectors Djemel ZIOU and Salvatore TABBONE D~partement de math~matiques et d'informatique, universit~ de Sherbrooke, Qc, Canada, J1K 2R1 Crin/Cnrs
Adaptative Elimination of False Edges for First Order Detectors Djemel ZIOU and Salvatore TABBONE D~partement de math~matiques et d'informatique, universit~ de Sherbrooke, Qc, Canada, J1K 2R1 Crin/Cnrs
EDGE BASED REGION GROWING
 EDGE BASED REGION GROWING Rupinder Singh, Jarnail Singh Preetkamal Sharma, Sudhir Sharma Abstract Image segmentation is a decomposition of scene into its components. It is a key step in image analysis.
EDGE BASED REGION GROWING Rupinder Singh, Jarnail Singh Preetkamal Sharma, Sudhir Sharma Abstract Image segmentation is a decomposition of scene into its components. It is a key step in image analysis.
EEM 463 Introduction to Image Processing. Week 3: Intensity Transformations
 EEM 463 Introduction to Image Processing Week 3: Intensity Transformations Fall 2013 Instructor: Hatice Çınar Akakın, Ph.D. haticecinarakakin@anadolu.edu.tr Anadolu University Enhancement Domains Spatial
EEM 463 Introduction to Image Processing Week 3: Intensity Transformations Fall 2013 Instructor: Hatice Çınar Akakın, Ph.D. haticecinarakakin@anadolu.edu.tr Anadolu University Enhancement Domains Spatial
Edge Detection. Today s reading. Cipolla & Gee on edge detection (available online) From Sandlot Science
 From Sandlot Science") Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Image Understanding Edge Detection
 Image Understanding Edge Detection 1 Introduction Thegoalofedgedetectionistoproducesomethinglikealinedrawingofanimage. Inpractice we will look for places in the image where the intensity changes quickly.
Image Understanding Edge Detection 1 Introduction Thegoalofedgedetectionistoproducesomethinglikealinedrawingofanimage. Inpractice we will look for places in the image where the intensity changes quickly.
CHAPTER 4 EDGE DETECTION TECHNIQUE
 56 CHAPTER 4 EDGE DETECTION TECHNIQUE The main and major aim of edge detection is to significantly reduce the amount of data significantly in an image, while preserving the structural properties to be
56 CHAPTER 4 EDGE DETECTION TECHNIQUE The main and major aim of edge detection is to significantly reduce the amount of data significantly in an image, while preserving the structural properties to be
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,