Lecture 18 Representation and description I. 2. Boundary descriptors
|
|
|
- Arron Houston
- 6 years ago
- Views:
Transcription
1 Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors
2 What is representation What is representation After segmentation, we obtain binary image with interested regions (objects) high-lighted. Presentation is to represent the interested regions in a format which is convenient to process by human or computer program. How to represent regions: 2 ways In terms of its external characteristics (its boundary), focusing on shape characteristics ti In terms of its internal characteristics (its region) focusing on regional properties, e.g., color, texture Or use both
3 Description Description: describes the region using certain features based on the chosen representation Feature selected should be as insensitive as possible to variations in size translation rotation Example Representation boundary Description length of the boundary, orientation of the straight line joining its extreme points, and the number of concavities in the boundary. 3
4 Moors boundary tracking algorithm Given 0/1 binary image, in which objects are labeled 1 and background is labeled 0. Given a region R, i.e., a set of connected pixels with label 1. Step 1. Let the start point b 0 be the uppermost and leftmost point of R Let c 0 be the w est neighbor of b 0. Step 2. Examine the 8-neighbor of bi starting at c i in clockwise direction. Let b i + 1 be the first p oint with lable 1, and c i+ 1 be the proceding bi+ 1 in the sequence. Store bi + 1 Step 3. Repeat Step 2 while not ( bi+ 1 = b0 and bi+ 2 = b1) Step 5. Output b0,..., b i + 1 4




5 Chain codes Chain codes are used to represent a boundary by a connected sequence of straight line segments of special length and direction. Freeman chain code: based on 4- or 8-connectivity of segments. The direction is coded using a number scheme. Drawbacks: long and sensitive to disturbances Solution: Resample by large grid spacing
6 Normalized chain codes Normalize for starting point: treat the chain code as a circular sequence of direction numbers and redefine the starting point so that the resulting sequence of numbers forms an integer of minimum magnitude Normalize for rotation: use the first different chain code instead, difference = the number of direction changes in a counterclockwise direction Example code different is circular chain code:
7 Example 8-direction Freeman chain code of the simplified boundary: The first difference:
8 Polygonal Approximations Boundary can be approximated with arbitrary accuracy by a polygon, try to capture the essence of the boundary shape with the fewest possible polygonal segments. Minimum-perimeter polygon (MPP) Cellular complex to enclose a boundary Idea: rubber band constrained by the inner and outer walls of bounding region if each cell encompass only one point on the boundary error is at most be 2d, d is the minimum possible distance between different pixels 8
9 MPP algorithm 1. Obtain the cellular complex 2. Obtain the region internal to the cellular complex 3. Use function boundaries to obtain the boundary of the region in step 2 as a 4- connected, clockwise sequence of coordinates 4. Obtain the Freeman chain code of the sequence 5. Obtain the convex (white) concave (black) vertices from the chain code 6. From an initial polygon using the convex vertices and delete any concave vertices that outside the polygon 7. Form a polygon with the remaining convex and concave vertices. 8. Delete all black dots that are concave 9. Repeat 7-8 until all changes cease. The remaining vertices are the vertices of MPP
10

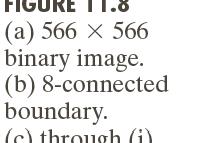
11 Example


12 Other polygonal approximation approaches Merging techniques based on average error or other criteria, merge points along the boundary until the least square error line fit of the points merged so far exceeds a preset threshold Splitting techniques find the major axis find minor axes which perpendicular to major axis and has distance greater than a threshold repeat until we can t split anymore


13 Signature A 1-D function representing a boundary.


14 Example

15 Boundary Segments Decompose a boundary into segment. Example: Find the convex hull H of an arbitrary set S. The set different H-S is called convex deficiency D of the set S, which can be computed by the boundary segmentation. 15

16 Skeletons Reduce a plane region shape to a graph. As the result of thinning: obtained by thinning operation, but may not keep the skeleton connected Skeleton defined by medial axis: points in the region has more than one closest neighbors Medial Axis Transformation (MAT): MAT of region R with border B is as follows. for each point p in R, we find its closet neighbor in B. if p has more than one such neighbor, it is said to belong to the medial axis of R closest depends on the definition of a distance
17 Using thinning iteratively deleting edge points of a region with constraints 1. does not remove end points 2. does not break connectivity 3. does not cause excessive erosion of the region 17
18 Skeleton Algorithm by thinning Assume region points have value 1 and background points have value 0 Step 1: flag a contour point p 1 for deletion if the following conditions are satisfied: (a) 2 N(p ) 6, (b) T(p ) = 1, (c) p p p = 0, (d) p p p = 0 where N( p ) = i 1 i p 2 + p 3 + K+ p + p N(p ) is the number of nonzero neighbors of contour point is any pixel with value 1 and having at least one 8-neighbor valued 0. After step 1 has marked every boundary points satisfy all 4 conditions, delete those pixels. step 2: remain condition (a) and (b) but change conditions (c) and (d) to follows (c) p2 p4 p8 = 0, (d) p2 p6 p8 = 0 flagged the remain border points for deletion. then delete the marked points 2 4 p 6 i repeat step 1) and 2) until no more points to delete
19 Example
20 2. Boundary Descriptors 1. length of a boundary 2. diameters 3. eccentricity 4. curvature 5. shape numbers 6. Fourier descriptors 7. Statistical moments 20
21 Length of a boundary and Diameters Length of a boundary : the number of pixels along a boundary, give a rough approximation of its length Diameters: Diam ( B) = max[ D( p, p )] D is a distance measure, p i and p j are points on the boundary B i, j i j 21
22 Eccentricity, Curvature Eccentricity Ratio of the major to the minor axis, major axis = the line connecting the two extreme points that comprise the diameter minor axis = the line perpendicular to the major axis Curvature The rate of change of slope difficult to do as digital boundaries tend to be locally ragged using the difference between the slopes of adjacent boundary segments (which represented as straight lines) use Merging and Splitting to create adjacent boundary segments concave, convex and coner 22


23 Shape numbers The number of digits in its representation 23
 s ( k ) = x ( k ) + jy ( k ) for k = 0, 1,.")
24 Fourier Descriptors boundary = (x 0,y 0 ),, (x K-1,y k-1 ) s ( k ) = x ( k ) + jy ( k ) for k = 0, 1,...,K- 1 24
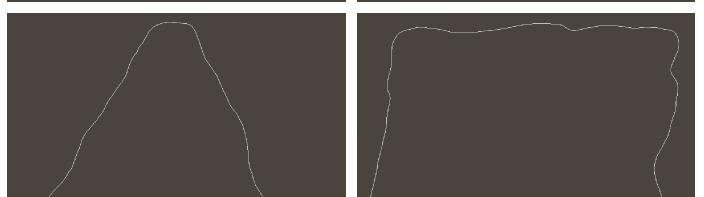
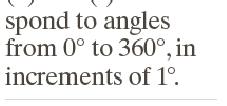
25 Fourier Descriptors Fourier transformation (DFT) K 1 1 j2 uk / K ar ( u) = π s( k) e for u = K k = 0 a(u) : Fourier coefficients (Fourier Descriptors) Inverse Fourier transformation s K 1 j 2 uk / K t ( k ) = π a( u) e for k = k = 0 01,,...,K-1 0, 1,...,K- 1 25

26 Invariant 26
27 P Coefficient of Fourier Descriptors sˆ( k ) P 1 k = 0 j 2 = π a ( u ) e uk / K for k = 0, 1,...,K- 1 approximation to s(k) descriptors => P number of coefficients 27
28
29 29
.")
30 Statistical moments The shape of boundary segments can be described by statistical moments such as mean, variance, higher-order moments. Assume the segmentation is represented by 1-D funciton g(r). p(vi), I = 0, 1, 2,, A-1, A is the number of discrete amplitude increments μ A 1 n n v = vi m p vi i = 0 A 1 ( ) ( ) ( ) w h ere m = vi p ( vi ) i = 0
EECS490: Digital Image Processing. Lecture #23
 Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Image representation. 1. Introduction
 Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Digital Image Processing Chapter 11: Image Description and Representation
 Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Lecture 10: Image Descriptors and Representation
 I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
9 length of contour = no. of horizontal and vertical components + ( 2 no. of diagonal components) diameter of boundary B
 diameter of boundary B") 8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Ulrik Söderström 21 Feb Representation and description
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Chapter 11 Representation & Description
 Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Feature description. IE PŁ M. Strzelecki, P. Strumiłło
 Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Anne Solberg
 INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
- Low-level image processing Image enhancement, restoration, transformation
 () Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
() Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Machine vision. Summary # 6: Shape descriptors
 Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Afdeling Toegepaste Wiskunde/ Division of Applied Mathematics Representation and description(skeletonization, shape numbers) SLIDE 1/16
 SLIDE 1/16") Representation and description(skeletonization, shape numbers) SLIDE 1/16 Chapter 11: Representation and Description Asegmentedregioncanberepresentedby { boundarypixels internal pixels When shape is important,
Representation and description(skeletonization, shape numbers) SLIDE 1/16 Chapter 11: Representation and Description Asegmentedregioncanberepresentedby { boundarypixels internal pixels When shape is important,
FROM PIXELS TO REGIONS
 Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
SUMMARY PART I. What is texture? Uses for texture analysis. Computing texture images. Using variance estimates. INF 4300 Digital Image Analysis
 INF 4 Digital Image Analysis SUMMARY PART I Fritz Albregtsen 4.. F 4.. INF 4 What is texture? Intuitively obvious, but no precise definition exists fine, coarse, grained, smooth etc Texture consists of
INF 4 Digital Image Analysis SUMMARY PART I Fritz Albregtsen 4.. F 4.. INF 4 What is texture? Intuitively obvious, but no precise definition exists fine, coarse, grained, smooth etc Texture consists of
COMP_4190 Artificial Intelligence Computer Vision. Computer Vision. Levels of Abstraction. Digital Images
 COMP_49 Artificial Intelligence Computer Vision Jacky Baltes Department of Computer Science University of Manitoba Winnipeg, Manitoba Canada, RT N jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
COMP_49 Artificial Intelligence Computer Vision Jacky Baltes Department of Computer Science University of Manitoba Winnipeg, Manitoba Canada, RT N jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang
 Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Mathematical Morphology and Distance Transforms. Robin Strand
 Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Morphological Image Processing
 Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
Morphological Image Processing
 Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
Subset Warping: Rubber Sheeting with Cuts
 Subset Warping: Rubber Sheeting with Cuts Pierre Landau and Eric Schwartz February 14, 1994 Correspondence should be sent to: Eric Schwartz Department of Cognitive and Neural Systems Boston University
Subset Warping: Rubber Sheeting with Cuts Pierre Landau and Eric Schwartz February 14, 1994 Correspondence should be sent to: Eric Schwartz Department of Cognitive and Neural Systems Boston University
Chapter 11 Arc Extraction and Segmentation
 Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Morphological Image Processing
 Morphological Image Processing Ranga Rodrigo October 9, 29 Outline Contents Preliminaries 2 Dilation and Erosion 3 2. Dilation.............................................. 3 2.2 Erosion..............................................
Morphological Image Processing Ranga Rodrigo October 9, 29 Outline Contents Preliminaries 2 Dilation and Erosion 3 2. Dilation.............................................. 3 2.2 Erosion..............................................
OCCHIO USA WHITE STONE VA TEL(866)
") PARAMETERS : 79 Weight factors: 6 Parameter Other name Symbol Definition Formula Number Volume V The volume of the particle volume model. Equivalent Volume The volume of the sphere having the same projection
PARAMETERS : 79 Weight factors: 6 Parameter Other name Symbol Definition Formula Number Volume V The volume of the particle volume model. Equivalent Volume The volume of the sphere having the same projection
ECEN 447 Digital Image Processing
 ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
Morphological Image Processing
 Digital Image Processing Lecture # 10 Morphological Image Processing Autumn 2012 Agenda Extraction of Connected Component Convex Hull Thinning Thickening Skeletonization Pruning Gray-scale Morphology Digital
Digital Image Processing Lecture # 10 Morphological Image Processing Autumn 2012 Agenda Extraction of Connected Component Convex Hull Thinning Thickening Skeletonization Pruning Gray-scale Morphology Digital
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
EECS490: Digital Image Processing. Lecture #20
 Lecture #20 Edge operators: LoG, DoG, Canny Edge linking Polygonal line fitting, polygon boundaries Edge relaxation Hough transform Image Segmentation Thresholded gradient image w/o smoothing Thresholded
Lecture #20 Edge operators: LoG, DoG, Canny Edge linking Polygonal line fitting, polygon boundaries Edge relaxation Hough transform Image Segmentation Thresholded gradient image w/o smoothing Thresholded
Binary Image Processing. Introduction to Computer Vision CSE 152 Lecture 5
 Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Files Used in This Tutorial. Background. Feature Extraction with Example-Based Classification Tutorial
 Feature Extraction with Example-Based Classification Tutorial In this tutorial, you will use Feature Extraction to extract rooftops from a multispectral QuickBird scene of a residential area in Boulder,
Feature Extraction with Example-Based Classification Tutorial In this tutorial, you will use Feature Extraction to extract rooftops from a multispectral QuickBird scene of a residential area in Boulder,
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
Problem definition Image acquisition Image segmentation Connected component analysis. Machine vision systems - 1
 Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
THE description and representation of the shape of an object
 Enhancement of Shape Description and Representation by Slope Ali Salem Bin Samma and Rosalina Abdul Salam Abstract Representation and description of object shapes by the slopes of their contours or borders
Enhancement of Shape Description and Representation by Slope Ali Salem Bin Samma and Rosalina Abdul Salam Abstract Representation and description of object shapes by the slopes of their contours or borders
OBJECT DESCRIPTION - FEATURE EXTRACTION
 INF 4300 Digital Image Analysis OBJECT DESCRIPTION - FEATURE EXTRACTION Fritz Albregtsen 1.10.011 F06 1.10.011 INF 4300 1 Today We go through G&W section 11. Boundary Descriptors G&W section 11.3 Regional
INF 4300 Digital Image Analysis OBJECT DESCRIPTION - FEATURE EXTRACTION Fritz Albregtsen 1.10.011 F06 1.10.011 INF 4300 1 Today We go through G&W section 11. Boundary Descriptors G&W section 11.3 Regional
 DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
Computational Geometry. Geometry Cross Product Convex Hull Problem Sweep Line Algorithm
 GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
Lecture 14 Shape. ch. 9, sec. 1-8, of Machine Vision by Wesley E. Snyder & Hairong Qi. Spring (CMU RI) : BioE 2630 (Pitt)
 : BioE 2630 (Pitt)") Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
CSCI 4620/8626. Coordinate Reference Frames
 CSCI 4620/8626 Computer Graphics Graphics Output Primitives Last update: 2014-02-03 Coordinate Reference Frames To describe a picture, the world-coordinate reference frame (2D or 3D) must be selected.
CSCI 4620/8626 Computer Graphics Graphics Output Primitives Last update: 2014-02-03 Coordinate Reference Frames To describe a picture, the world-coordinate reference frame (2D or 3D) must be selected.
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Image Processing, Analysis and Machine Vision
 Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
4-Border and 4-Boundary
 4-Border and 4-Boundary set S = black and white pixels; set M S = black pixels invalid edges = all edges between M and M = S \ M p M 4-inner pixel iff A 4 (p) M (shown in gray) p M 4-border pixel iff p
4-Border and 4-Boundary set S = black and white pixels; set M S = black pixels invalid edges = all edges between M and M = S \ M p M 4-inner pixel iff A 4 (p) M (shown in gray) p M 4-border pixel iff p
Morphological track 1
 Morphological track 1 Shapes Painting of living beings on cave walls at Lascaux [about 1500 th BC] L homme qui marche by Alberto Giacometti, 1948, NOUVELLES IMAGES Editor (1976) Les lutteurs by Honoré
Morphological track 1 Shapes Painting of living beings on cave walls at Lascaux [about 1500 th BC] L homme qui marche by Alberto Giacometti, 1948, NOUVELLES IMAGES Editor (1976) Les lutteurs by Honoré
6. Applications - Text recognition in videos - Semantic video analysis
 6. Applications - Text recognition in videos - Semantic video analysis Stephan Kopf 1 Motivation Goal: Segmentation and classification of characters Only few significant features are visible in these simple
6. Applications - Text recognition in videos - Semantic video analysis Stephan Kopf 1 Motivation Goal: Segmentation and classification of characters Only few significant features are visible in these simple
Shape description and modelling
 COMP3204/COMP6223: Computer Vision Shape description and modelling Jonathon Hare jsh2@ecs.soton.ac.uk Extracting features from shapes represented by connected components Recap: Connected Component A connected
COMP3204/COMP6223: Computer Vision Shape description and modelling Jonathon Hare jsh2@ecs.soton.ac.uk Extracting features from shapes represented by connected components Recap: Connected Component A connected
Overview. Spectral Processing of Point- Sampled Geometry. Introduction. Introduction. Fourier Transform. Fourier Transform
 Overview Spectral Processing of Point- Sampled Geometry Introduction Fourier transform Spectral processing pipeline Spectral filtering Adaptive subsampling Summary Point-Based Computer Graphics Markus
Overview Spectral Processing of Point- Sampled Geometry Introduction Fourier transform Spectral processing pipeline Spectral filtering Adaptive subsampling Summary Point-Based Computer Graphics Markus
SUMMARY PART I. Variance, 2, is directly a measure of roughness. A bounded measure of smoothness is
 Digital Image Analsis SUMMARY PART I Fritz Albregtsen 4..6 Teture description of regions Remember: we estimate local properties (features) to be able to isolate regions which are similar in an image (segmentation),
Digital Image Analsis SUMMARY PART I Fritz Albregtsen 4..6 Teture description of regions Remember: we estimate local properties (features) to be able to isolate regions which are similar in an image (segmentation),
EECS490: Digital Image Processing. Lecture #17
 Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
Chapter 10: Image Segmentation. Office room : 841
 Chapter 10: Image Segmentation Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cn Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Contents Definition and methods classification
Chapter 10: Image Segmentation Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cn Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Contents Definition and methods classification
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
CS534 Introduction to Computer Vision Binary Image Analysis. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
Image retrieval based on region shape similarity
 Image retrieval based on region shape similarity Cheng Chang Liu Wenyin Hongjiang Zhang Microsoft Research China, 49 Zhichun Road, Beijing 8, China {wyliu, hjzhang}@microsoft.com ABSTRACT This paper presents
Image retrieval based on region shape similarity Cheng Chang Liu Wenyin Hongjiang Zhang Microsoft Research China, 49 Zhichun Road, Beijing 8, China {wyliu, hjzhang}@microsoft.com ABSTRACT This paper presents
Lecture 3: Art Gallery Problems and Polygon Triangulation
 EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS.
 SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
Shape representation by skeletonization. Shape. Shape. modular machine vision system. Feature extraction shape representation. Shape representation
 Shape representation by skeletonization Kálmán Palágyi Shape It is a fundamental concept in computer vision. It can be regarded as the basis for high-level image processing stages concentrating on scene
Shape representation by skeletonization Kálmán Palágyi Shape It is a fundamental concept in computer vision. It can be regarded as the basis for high-level image processing stages concentrating on scene
Lecture 15: Segmentation (Edge Based, Hough Transform)
") Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
Computer Graphics. The Two-Dimensional Viewing. Somsak Walairacht, Computer Engineering, KMITL
 Computer Graphics Chapter 6 The Two-Dimensional Viewing Somsak Walairacht, Computer Engineering, KMITL Outline The Two-Dimensional Viewing Pipeline The Clipping Window Normalization and Viewport Transformations
Computer Graphics Chapter 6 The Two-Dimensional Viewing Somsak Walairacht, Computer Engineering, KMITL Outline The Two-Dimensional Viewing Pipeline The Clipping Window Normalization and Viewport Transformations
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
2: Image Display and Digital Images. EE547 Computer Vision: Lecture Slides. 2: Digital Images. 1. Introduction: EE547 Computer Vision
 EE547 Computer Vision: Lecture Slides Anthony P. Reeves November 24, 1998 Lecture 2: Image Display and Digital Images 2: Image Display and Digital Images Image Display: - True Color, Grey, Pseudo Color,
EE547 Computer Vision: Lecture Slides Anthony P. Reeves November 24, 1998 Lecture 2: Image Display and Digital Images 2: Image Display and Digital Images Image Display: - True Color, Grey, Pseudo Color,
Lecture: Segmentation I FMAN30: Medical Image Analysis. Anders Heyden
 Lecture: Segmentation I FMAN30: Medical Image Analysis Anders Heyden 2017-11-13 Content What is segmentation? Motivation Segmentation methods Contour-based Voxel/pixel-based Discussion What is segmentation?
Lecture: Segmentation I FMAN30: Medical Image Analysis Anders Heyden 2017-11-13 Content What is segmentation? Motivation Segmentation methods Contour-based Voxel/pixel-based Discussion What is segmentation?
Chapter 3. Sukhwinder Singh
 Chapter 3 Sukhwinder Singh PIXEL ADDRESSING AND OBJECT GEOMETRY Object descriptions are given in a world reference frame, chosen to suit a particular application, and input world coordinates are ultimately
Chapter 3 Sukhwinder Singh PIXEL ADDRESSING AND OBJECT GEOMETRY Object descriptions are given in a world reference frame, chosen to suit a particular application, and input world coordinates are ultimately
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
RESEARCH ON OPTIMIZATION OF IMAGE USING SKELETONIZATION TECHNIQUE WITH ADVANCED ALGORITHM
 881 RESEARCH ON OPTIMIZATION OF IMAGE USING SKELETONIZATION TECHNIQUE WITH ADVANCED ALGORITHM Sarita Jain 1 Sumit Rana 2 Department of CSE 1 Department of CSE 2 Geeta Engineering College 1, Panipat, India
881 RESEARCH ON OPTIMIZATION OF IMAGE USING SKELETONIZATION TECHNIQUE WITH ADVANCED ALGORITHM Sarita Jain 1 Sumit Rana 2 Department of CSE 1 Department of CSE 2 Geeta Engineering College 1, Panipat, India
Interactive Math Glossary Terms and Definitions
 Terms and Definitions Absolute Value the magnitude of a number, or the distance from 0 on a real number line Addend any number or quantity being added addend + addend = sum Additive Property of Area the
Terms and Definitions Absolute Value the magnitude of a number, or the distance from 0 on a real number line Addend any number or quantity being added addend + addend = sum Additive Property of Area the
09/11/2017. Morphological image processing. Morphological image processing. Morphological image processing. Morphological image processing (binary)
") Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Dynamic Collision Detection
 Distance Computation Between Non-Convex Polyhedra June 17, 2002 Applications Dynamic Collision Detection Applications Dynamic Collision Detection Evaluating Safety Tolerances Applications Dynamic Collision
Distance Computation Between Non-Convex Polyhedra June 17, 2002 Applications Dynamic Collision Detection Applications Dynamic Collision Detection Evaluating Safety Tolerances Applications Dynamic Collision
Hierarchical Representation of 2-D Shapes using Convex Polygons: a Contour-Based Approach
 Hierarchical Representation of 2-D Shapes using Convex Polygons: a Contour-Based Approach O. El Badawy, M. S. Kamel Pattern Analysis and Machine Intelligence Laboratory, Department of Systems Design Engineering,
Hierarchical Representation of 2-D Shapes using Convex Polygons: a Contour-Based Approach O. El Badawy, M. S. Kamel Pattern Analysis and Machine Intelligence Laboratory, Department of Systems Design Engineering,
2D Object Description with Discrete Segments
 Journal of Computer Science 2 (7): 572-576, 2006 ISSN 1549-3636 2006 Science Publications 2D Object Description with Discrete Segments Nbhan D. Salih, David Chek Ling Ngo and Hakim Mellah Faculty of Information
Journal of Computer Science 2 (7): 572-576, 2006 ISSN 1549-3636 2006 Science Publications 2D Object Description with Discrete Segments Nbhan D. Salih, David Chek Ling Ngo and Hakim Mellah Faculty of Information
Polygonal Skeletons. Tutorial 2 Computational Geometry
 Polygonal Skeletons Tutorial 2 Computational Geometry The Skeleton of a Simple Polygon A polygon is a closed contour in the plane, which might contain holes (which are simple polygons as well). A skeleton
Polygonal Skeletons Tutorial 2 Computational Geometry The Skeleton of a Simple Polygon A polygon is a closed contour in the plane, which might contain holes (which are simple polygons as well). A skeleton
Figure 1: Workflow of object-based classification
 Technical Specifications Object Analyst Object Analyst is an add-on package for Geomatica that provides tools for segmentation, classification, and feature extraction. Object Analyst includes an all-in-one
Technical Specifications Object Analyst Object Analyst is an add-on package for Geomatica that provides tools for segmentation, classification, and feature extraction. Object Analyst includes an all-in-one
Matching and Recognition in 3D. Based on slides by Tom Funkhouser and Misha Kazhdan
 Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Collision handling: detection and response
 Collision handling: detection and response Collision handling overview Detection Discrete collision detection Convex polygon intersection test General polygon intersection test Continuous collision detection
Collision handling: detection and response Collision handling overview Detection Discrete collision detection Convex polygon intersection test General polygon intersection test Continuous collision detection
Examination in Image Processing
 Umeå University, TFE Ulrik Söderström 203-03-27 Examination in Image Processing Time for examination: 4.00 20.00 Please try to extend the answers as much as possible. Do not answer in a single sentence.
Umeå University, TFE Ulrik Söderström 203-03-27 Examination in Image Processing Time for examination: 4.00 20.00 Please try to extend the answers as much as possible. Do not answer in a single sentence.
Skeletonization and its applications. Dept. Image Processing & Computer Graphics University of Szeged, Hungary
 Skeletonization and its applications Kálmán Palágyi Dept. Image Processing & Computer Graphics University of Szeged, Hungary Syllabus Shape Shape features Skeleton Skeletonization Applications Syllabus
Skeletonization and its applications Kálmán Palágyi Dept. Image Processing & Computer Graphics University of Szeged, Hungary Syllabus Shape Shape features Skeleton Skeletonization Applications Syllabus
Morphological Image Processing
 Morphological Image Processing Introduction Morphology: a branch of biology that deals with the form and structure of animals and plants Morphological image processing is used to extract image components
Morphological Image Processing Introduction Morphology: a branch of biology that deals with the form and structure of animals and plants Morphological image processing is used to extract image components
Introduction. Computer Vision & Digital Image Processing. Preview. Basic Concepts from Set Theory
 Introduction Computer Vision & Digital Image Processing Morphological Image Processing I Morphology a branch of biology concerned with the form and structure of plants and animals Mathematical morphology
Introduction Computer Vision & Digital Image Processing Morphological Image Processing I Morphology a branch of biology concerned with the form and structure of plants and animals Mathematical morphology
Parallel Computation of Spherical Parameterizations for Mesh Analysis. Th. Athanasiadis and I. Fudos University of Ioannina, Greece
 Parallel Computation of Spherical Parameterizations for Mesh Analysis Th. Athanasiadis and I. Fudos, Greece Introduction Mesh parameterization is a powerful geometry processing tool Applications Remeshing
Parallel Computation of Spherical Parameterizations for Mesh Analysis Th. Athanasiadis and I. Fudos, Greece Introduction Mesh parameterization is a powerful geometry processing tool Applications Remeshing
Fundamentals of Digital Image Processing
 \L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
\L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Polygon decomposition. Motivation: Art gallery problem
 CG Lecture 3 Polygon decomposition 1. Polygon triangulation Triangulation theory Monotone polygon triangulation 2. Polygon decomposition into monotone pieces 3. Trapezoidal decomposition 4. Convex decomposition
CG Lecture 3 Polygon decomposition 1. Polygon triangulation Triangulation theory Monotone polygon triangulation 2. Polygon decomposition into monotone pieces 3. Trapezoidal decomposition 4. Convex decomposition
Skeletonization Algorithm for Numeral Patterns
 International Journal of Signal Processing, Image Processing and Pattern Recognition 63 Skeletonization Algorithm for Numeral Patterns Gupta Rakesh and Kaur Rajpreet Department. of CSE, SDDIET Barwala,
International Journal of Signal Processing, Image Processing and Pattern Recognition 63 Skeletonization Algorithm for Numeral Patterns Gupta Rakesh and Kaur Rajpreet Department. of CSE, SDDIET Barwala,
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 10 Image Segmenta
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 10 Image Segmenta
Corner Detection using Difference Chain Code as Curvature
 Third International IEEE Conference on Signal-Image Technologies technologies and Internet-Based System Corner Detection using Difference Chain Code as Curvature Neeta Nain Vijay Laxmi Bhavitavya Bhadviya
Third International IEEE Conference on Signal-Image Technologies technologies and Internet-Based System Corner Detection using Difference Chain Code as Curvature Neeta Nain Vijay Laxmi Bhavitavya Bhadviya
APPENDIX: DETAILS ABOUT THE DISTANCE TRANSFORM
 APPENDIX: DETAILS ABOUT THE DISTANCE TRANSFORM To speed up the closest-point distance computation, 3D Euclidean Distance Transform (DT) can be used in the proposed method. A DT is a uniform discretization
APPENDIX: DETAILS ABOUT THE DISTANCE TRANSFORM To speed up the closest-point distance computation, 3D Euclidean Distance Transform (DT) can be used in the proposed method. A DT is a uniform discretization
An introduction to interpolation and splines
 An introduction to interpolation and splines Kenneth H. Carpenter, EECE KSU November 22, 1999 revised November 20, 2001, April 24, 2002, April 14, 2004 1 Introduction Suppose one wishes to draw a curve
An introduction to interpolation and splines Kenneth H. Carpenter, EECE KSU November 22, 1999 revised November 20, 2001, April 24, 2002, April 14, 2004 1 Introduction Suppose one wishes to draw a curve