Three-dimensional Image Processing Techniques to Perform Landmarking and Segmentation of Computed Tomographic Images
|
|
|
- Joleen Claire Dennis
- 6 years ago
- Views:
Transcription


1 Three-dimensional Image Processing Techniques to Perform Landmarking and Segmentation of Computed Tomographic Images Rangaraj M. Rangayyan, Shantanu Banik, Graham S. Boag Department of Electrical and Computer Engineering University of Calgary Alberta Children s Hospital Calgary, Alberta, Canada.
2 Introduction Identification and segmentation of the thoracic, abdominal, and pelvic organs are important steps in computer-aided diagnosis, treatment planning, landmarking, and content-based retrieval of biomedical images. 2
3 Computer-aided Diagnosis (CAD) Manual segmentation and analysis of an organ or region of interest can provide accurate assessment, but are: tedious, time-consuming, and subject to intra- and inter-operator error. 3
4 Computer-aided Diagnosis (CAD) Computer-aided analysis of medical images could facilitate quantitative and objective analysis. Physicians could use the results of computer analysis as a second opinion to make the final decision. 4
5 Segmentation of Medical Images For improved localization, segmentation, and analysis of various organs, the following approaches could be used: prior knowledge (knowledge-based), anatomical atlases (atlas-based), anatomical landmarks (landmark-based), and relative coordinate systems (landmark-based). 5
6 Landmarking of Medical Images Landmarks are used as references to represent the spatial relationship between different regions, organs, and structures in medical images. Landmarks are selected such that they: are easy to detect, have stable locations, and have characteristics that do not vary to a large extent in the presence of abnormalities. 6
7 Tissue Characterization in Computed Tomographic (CT) Images As an X-ray beam traverses the body, it is attenuated according to Lambert-Beer law: I = I exp( µ l) t 0 I t : transmitted intensity of the X ray, I 0 : incident intensity, l : length of the path of the beam, and µ: linear attenuation coefficient. 7
8 Hounsfield Units (HU) To represent in a more convenient manner and to make it effectively independent of the X-ray energy: µ µ w CT number = k µ µ w µ : linear attenuation coefficient of water k : scaling constant If k = 1000: Hounsfield units (HU). w 8
9 CT Values of Abdominal Tissues Tissue Air Fat Skin Spinal Canal Kidney Blood (Aorta) Muscle Spleen Necrosis Liver Viable Tumor Calcification Bone CT value (HU) Mean SD
10 Segmentation of CT Images: Motivation Most of the published procedures are only applicable to CT scans of adults. In pediatric cases, organs and tissues are not well developed, and possess different density or HU values than those for adults. This work is on segmentation and analysis of CT images of pediatric patients with tumors due to neuroblastoma in thoracic, abdominal, and pelvic regions. 10
11 Proposed Study Automatic segmentation of the rib structure, the vertebral column, the spinal canal, the diaphragm, and the pelvic girdle. Use of these landmarks in the segmentation of abdominal tumors (neuroblastoma). 11
12 Image Processing: Segmentation Process of partitioning an image into regions representing the different objects in the image. Based on one of the two basic properties: discontinuity and similarity. 12
13 Histogram The histogram of a digital image f (x, y) of size M N with L gray levels is defined as: P f ( l) M 1 N 1 = x= 0 y= 0 δ[ f ( x,y) l], l = 0, 1, 2, K, L 1 where the delta function δ(n) is defined as δ( n) for n = 0 otherwise The sum of all the entries in the histogram is equal to the total number of pixels (or voxels) in the image. 1, 0, 13
14 Histogram If the image has large number of pixels (or voxels), the histogram will approximate the probability density function (PDF) of the gray levels in the image Number of pixels Hounsfield unit values 14
15 Thresholding Gray level thresholding segments an image based on the value at each point (x, y) or pixel relative to a specified threshold value, T. Thresholding can be local or global. In the simplest case, known as binarization, a single threshold is specified g( x, y) = 1, 0, f ( x,y) f ( x,y) where T G; G is the set of available values for gray levels. if if > T T 15
16 Thresholding The use of multiple thresholds to perform segmentation is known as multi-thresholding. A set of thresholds, T = { T0, T1, T2, K, Tk }, is defined such that all elements in the image satisfying f ( x, y) = [ Ti 1, Ti ), i = 1, 2, K, k, constitute the i th segmented region. In order to be effective good separation between the values of objects of interest and the background is required. 16
17 Thresholding Original image Thresholding at T = 200 HU Multi-thresholding at T 0 = 0 HU, T 1 = 200 HU 17
18 Region-based Methods If R represents the entire image region and segmentation results in n subregions, R 1, R 2,..., R n, the results should satisfy 1. U n i= 1 R i =1 R i = R, 2. R i is a connected region, i = 1, 2,..., n, 3. R i I R j = for all i j, 4. P (R i ) = TRUE for all i = 1, 2,..., n, 5. P (R i U R j ) = FALSE for all i j, where P (R i ) is a logical predicate defined over the points or pixels in the set R i, and is the null set. 18
19 Region Growing Region-based methods can be divided into two groups: region growing, and region splitting and merging. Region growing groups pixels or subregions into larger regions based on predefined criteria and connectivity. The result depends on: selection of seed pixel or pixels, specification of inclusion or similarity criteria, and formulation of stopping rule. 19
20 Region Splitting and Merging Splitting is used to subdivide the entire region successively into smaller and smaller disjoint regions until the homogeneity criterion is satisfied by each region. Region splitting could result in adjacent regions with identical or similar properties. Merging allows neighboring homogeneous subregions to be combined into larger regions. 20
21 21 Edge-based Techniques An edge is the oriented boundary between two regions with relatively distinct gray-level properties. Most edge detection techniques require the computation of a local derivative or difference. The gradient of an image f (x, y) at the location (x, y) is defined as the vector = = y f x f G G y x f
22 Gradient The magnitude of the gradient vector is given by [ ] f = f = G x + G y The direction (angle) of the gradient vector is given by G 1 y α( x, y) = tan Gx where the angle is measured with respect to the x axis. 22
23 23 Edge Detection in Digital Images In digital images, the magnitude of the gradient is approximated by first difference operations: 1)., ( ), ( ), ( ), 1, ( ), ( ), ( = = y x f y x f y x G y x f y x f y x G y x Original image Gradient magnitude, display range [5, 150] out of [0, 2371].
24 24 Edge Detection in Digital Images Horizontal Vertical Among the difference-based edge detection operators, the Prewitt and Sobel operators are simple and popular Horizontal Vertical The Prewitt operators The Sobel operators
25 Edge Detection in Digital Images The Laplacian is a second-order difference operator, widely used for omnidirectional edge detection The Laplacian produces double-edged outputs, and is sensitive to noise. The Laplacian-of-Gaussian (LoG) is the combination of the Laplacian and the Gaussian, and can be used for robust omnidirectional edge detection
26 Canny s Method for Edge Detection Optimal edge detection technique. Based upon three criteria for good edge detection: multi-directional derivatives, multi-scale analysis, and optimization procedures. Selectively evaluates directional derivatives at each edge. 26

27 Canny s Method for Edge Detection 27
28 Image Segmentation Using Deformable Contours (Snakes) Contour in image domain that deforms according to internal and external forces. Internal forces are defined within the contour itself to maintain the contour smooth. External forces are computed from the image data to move the contour toward an object boundary. When the external and the internal forces become equal, the force field attains equilibrium and the contour stabilizes. 28
29 Deformable Contours Modeled as a closed curve: C( s) = ( X( s), Y( s)), s [0,1] The contour is like an elastic string subjected to a set of dynamic forces: µ m 2 C 2 t = F int ( C) + F ext ( C) + F damp ( C) µ m : specific mass of the contour; t : time 29
30 Deformable Contours The Internal force is given by: F int ( C) s C α s s 2 C β s = 2 2 α : tension; 2 β : rigidity The 1 st order derivative discourages stretching, and makes the model behave like an elastic string. The 2 nd order derivative discourages bending, and makes the model behave like a rigid rod. 30
31 Deformable Contours The damping (viscous) force is given by: F damp C (C) = γ ; γ : viscosity t A viscous force is introduced to stabilize the deformable contour around the static equilibrium configuration. The mass of the contour is often assumed to be zero: C γ = t F int ( C) + F ext ( C) 31
32 Deformable Contours The external force can be composed of either potential forces or non-potential forces. Traditional definition of external force for image I(x,y): F ( C) = ( x, y) ext I If the contour is not initialized close to the object s boundary, the external force will have a low intensity and will not result in proper convergence. 2 To address this problem Gradient Vector Flow (GVF) field could be used as an external force. 32
33 33 Gradient Vector Flow (GVF) Based on a vector diffusion equation that diffuses the gradient of an edge map in regions distant from the boundary. GVF field is defined as the solution to where, is a regularization parameter = + y E x E x E u u λ = + y E x E x E v v λ )], ( ),, ( [ y x v y x u 2 ), ( ), ( y x I y x E = λ
34 Gradient Vector Flow (GVF) The spatial extent of the external forces may be enhanced with the mapping function: f ( w( x, y)) = K 2 w( x, y) 1 exp K 1 w( x, y) w( x, y) where [ u ( x, y ) v ( x, y ] T w ( x, y ) = ), the GVF field component; K 1 K 2 determines the rate of convergence determines the asymptote of convergence 34

35 Image Segmentation Using Deformable Contours (Snakes) α = 30, β = 10, λ = 01., K = 0.1, K2 1 = 1.0 automatic initialization contour of the diaphragm 35
36 The Hough Transform Useful tool to detect any shape that can be represented by a parametric equation (straight line, circle, ellipse). Uses the information related to the edges in the form of a binary image. Has the ability to recognize shapes and object boundaries, even with sparse edge map. 36
37 The Hough Transform Detection of straight lines: A straight line can be represented by the angle θ of its normal and its distance ρ from the origin by the equation ρ = x cosθ + y sinθ In the Hough space or parameter space (ρ, θ), any straight line in the image domain is represented by a single point. The sinusoidal curves in the parameter space of all points that lie on the line ρ0 = x cosθ0 + y sinθ0 intersect at (ρ 0, θ 0 ). 37
38 The Hough Transform Detection of straight lines: θ is restricted to [0º, 180º] or [0º, 360º]. ρ is restricted by the size of the image. The origin may be chosen at the center of the image or any arbitrary point. The value of ρ can be considered to be negative for normals to lines extending below the horizontal axis, x=0, in the image, with the origin at the center of the image, and θ in the range [0º, 180º]. 38
. Limits of x and y axis are ±100; the origin is at the center of the image.")
39 The Hough Transform Detection of straight lines: 150 ρ An image with two straight lines (ρ, θ)=(-100, 30º) and (20, 60º). Limits of x and y axis are ±100; the origin is at the center of the image º θ 180º 39
40 The Hough Transform Detection of circles: All points along the circumference of a circle of radius c centered at (x, y) = (a, b) satisfy the relationship ( x a) + ( y b) = c A circle is represented by a single point in the 3D parameter space (a, b, c). The points along the circumference or the edge of a circle in the (x, y) plane describe a right circular cone in the Hough parameter space, which is limited by the image size. 40




 = (1, 1) is")

41 The Hough Transform Detection of circles: c = 20 pixels c = 24 pixels c = 25 pixels image, with a circle of radius c = 25 pixels, centered at (x, y) = (50, 50). (x, y) = (1, 1) is at the top left corner. c = 26 pixels c = 30 pixels 41
42 The Convex Hull The convex hull H of a set of points S is the smallest convex set that contains all the points. A set A is said to be convex if the straight-line segment joining any two points in A lies entirely within A. The set difference H - S is called the convex deficiency of S. 42


43 The Convex Hull Convex hull Gray: actual region White: convex deficiency 43
44 Fuzzy Sets A fuzzy set A in a reference set X can be characterized by a membership function, m A, that maps all elements in X into the interval [0, 1]. The fuzzy set may be represented as a set of fuzzy pairings A = {(x, m A (x)) x є X} m A (x) = x [0, 1], for x є X The membership value m A (x) denotes the degree to which an element x satisfies the properties of the set A. 44
45 Fuzzy Sets Given two fuzzy sets A and B with the membership functions m A (x) and m B (x), the standard set-theoretic relations and operations are defined as: Equality (=): Containment ( ): Complement (~): Intersection ( ): Union (U): A = B m A = m B A B m A m B m à (x) = 1-m A (x) m A B (x) = min {m A (x), m B (x)} m AUB (x) = max {m A (x), m B (x)} 45
46 Fuzzy Mapping The value m A (r) is called the grade of membership of r in A: this function indicates the degree to which r satisfies the membership criteria defining A. Consider the set of numbers that are close to 10. In defining m A (r), three properties should be satisfied: 1. Normality: m A (10) = Monotonicity: the closer the value of r is to 10, the closer m A should be to Symmetry: numbers equally far from 10, such as 9 and 11, should have equal membership. 46
47 Fuzzy Mapping The unnormalized Gaussian function, defined as m A ( r) exp ( r µ ) 2σ = 2 satisfies all the properties. The parameters and characterize the set A. 2 µ σ 47



48 Fuzzy Mapping Original image µ = 412 HU, σ = 156 HU µ = -528 HU, σ = 121 HU µ = 18 HU, σ = 14 HU 48
49 49 Fuzzy Connectivity: Affinity Object definition is based on local affinity between voxels as proposed by Udupa and Samarasekera. The closer the voxels and the more similar their values, the greater the affinity + = 2 2 ) ( ) ( 2 1 exp ), ( σ µ η b f a f b a a and b are two adjacent (six-connected) voxels. = mean of 3 x 3 x 3 region surrounding the seed voxel, = SD µ σ
50 Fuzzy Connectivity: Connectedness Connectedness is based on the affinity function. The connectedness is dependent on all possible connecting paths between two voxels. A connecting path is formed from a sequence of links between successive adjacent voxels in the path. The strength of each link is the affinity between the two adjacent voxels in the link. The strength of a path is the strength of its weakest link. 50
51 Fuzzy Connectivity: Connectedness The strength of connectedness between two voxels is the strength of the strongest path. The points belonging to the same object should possess a high degree of connectedness due to the strong resemblance based on the fuzzy membership, and the existence of strong paths connecting them. 51
52 Fuzzy Connectivity: Connectedness Background or undesired elements should possess a low degree of connectedness with the object. Paths could exist between the desired and undesired elements: they would possess low membership values. 52
53 Fuzzy Connectivity: Algorithm Initialize algorithm with seed voxel; assign the maximum membership of unity. Grow region by evaluating the connectivity between the seed voxel and all connected voxels in the volume. Produce membership volume. Threshold membership volume to obtain hard binary segmentation. 53
54 Morphological Image Processing A branch of nonlinear image processing that concentrates on the analysis of geometrical structures in an image. Based on conventional set theory. Probe the image with the structuring element and quantify the manner in which the structuring element fits, or does not fit, within the image. The most elementary set operations relating to mathematical morphology should be increasing and translation invariant. 54
55 Binary Morphological Image Processing Fundamental binary operations are based on Minkowski algebra. Fundamental operations are: erosion, and dilation. Secondary operations are: opening (erosion + dilation), and closing (dilation + erosion). 55
56 Erosion Translation invariant, known as Minkowski subtraction. If the origin lies within the structuring element, the effect is shrinking; the result is a subset of the original image. Protrusions smaller than the structuring element are eliminated. In digital implementation, if any of the pixels within the neighborhood defined by the structuring element is off (i.e., set to 0), the output pixel is also set to 0. 56

57 Erosion B B 57
58 Dilation Translation invariant, known as Minkowski addition. If the origin lies within the structuring element, it fills in small holes (relative to the structuring element) and intrusions. Represents filtering on the outside, and has the effect of expansion. In digital implementation, if any of the pixels within the neighborhood defined by the structuring element is on (i.e., set to 1), the output pixel is also set to 1. 58

59 Dilation B B 59
60 Opening Has the property of idempotency. Obtained by applying erosion followed by dilation. If the origin lies within the structuring element: removes objects smaller than the structuring element, smoothens the edges of the remaining objects, and disconnects objects that are connected by branches smaller than the structuring element. 60

61 Opening B B 61
62 Closing Has the property of idempotency. Obtained by applying dilation followed by erosion. If the origin lies within the structuring element: fills in holes and intrusions smaller than the structuring element, and connects objects that are disconnected by gaps smaller than the structuring element. 62
63 Closing B B 63

64 Binary Morphological Operations Original Eroded Dilated Opened Closed Disk-type flat structuring element of radius 5 pixels 64
65 Gray-scale Morphological Image Processing Extension of binary morphological image processing using threshold decomposition: decomposing a gray-scale image into a series of stacked binary images. Gray-scale flat erosion: replaces the value of an image f at a pixel (x, y) by the infimum of the values of f over the structuring element B. Gray-scale flat dilation: replaces the value of an image f at a pixel (x, y) by the supremum of the values of f over the reflected structuring element B. Gray-scale opening and closing obtained similarly. 65
66 Opening-by-reconstruction Morphological operator that analyzes the connectivity of objects in the image. Iterative procedure to extract regions of interest from the image using a marker. Computationally more efficient than fuzzy connectivity: useful for multi-seed approach. 66
67 Opening-by-reconstruction Starting with a mask, I, and marker, J, the gray-scale reconstruction, ρ I, is defined as ρ I ( J ) = n 1 δ ( n) I ( J ) where δ I (n) refers to n iterations of geodesic dilation and represents the supremum of the results. 67


68 Opening-by-reconstruction Marker, J, is dilated using a structuring element, B, such that result is constrained to the mask, I J I. 68
69 Image Segmentation Using Opening-by-reconstruction Image mapped to obtain fuzzy-membership values: f ( x, µ, σ ) Using this mapping, elementary dilations performed on the marker, restricted by the mask. Mask exp ( x µ ) 2σ = 2 2 Marker 69

70 Image Segmentation Using Opening-by-reconstruction Mask = fuzzy-membership map (constraint) Marker = seed pixel or region (starting point) Dilate marker within the mask until no further change is found between two iterations. seed pixel fuzzy-map (µ = 30 HU, σ =17 HU) result 70
71 71 Linear Least-squares (LLS) Estimation Extract N coordinates of the surface and place in a vector: Model the expected region as a quadratic surface: Calculate error between real data, z, and model, z : ( ) i i i i z y x,, = v a y a x a y x a y a x a z i i i i i i i = z z r =
72 72 Linear Least-squares (LLS) Estimation Estimate the best set of parameters that minimizes the squared error r T r where = N N N N N N y x y x y x y x y x y x y x y x y x M M M M M M Ω z Ω Ω Ω a T T 1 ) ( ˆ =
73 CT Dataset Number of patients: 14 Number of CT exams: 40 Ages of the patients: 2 weeks to 20 years Intra-slice resolution: 0.35 mm to 0.70 mm Inter-slice resolution: 2.5 mm or 5 mm Number of exams including contrast: 36 73
74 Quantitative Assessment Hausdorff distance: The directed Hausdorff distance from set A to set B is defined as A more general definition of the Hausdorff distance: 74
75 Quantitative Assessment Mean Distance to the Closest Point (MDCP): Given two sets and distance to the closest point (DCP) is defined as 75
76 Quantitative Assessment Measures of volumetric accuracy: Total error False-positive error rate True-positive rate where V () is the volume, A is the result of segmentation using the proposed procedures, and R is the result of segmentation by a radiologist (the ground truth). 76
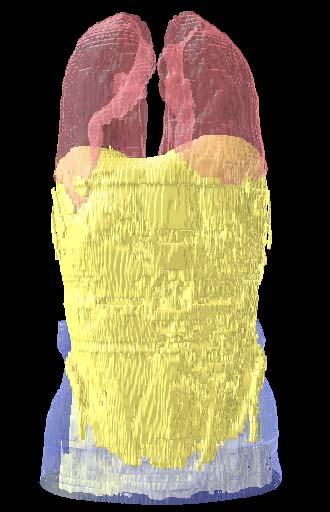
77 Preprocessing Steps Original CT volume Grow air region; remove Erode skin; remove Grow peripheral fat; remove Grow peripheral muscle; remove Preprocessed CT volume; peripheral artifacts and tissues removed 77
78 Removal of Peripheral Artifacts and the External Air Region By definition, air has CT number of 1000 HU. Each CT volume is thresholded with the range HU to -400 HU. 2D binary opening-by-reconstruction is applied on a slice-by-slice basis using the thresholded volume as mask and the four corners of each slice as markers. Morphologically closed using a disk type structuring element of radius 10 pixels (approximately 5 mm) to remove material external to the body. 78
79 Removal of the Skin Layer Skin is the first layer from the outside of the body, with usual thickness of 1 to 3 mm. The air region is morphologically dilated in 2D to include the skin. The skin layer could be used as a landmark for registration and segmentation. 79
80 Removal of the Peripheral Fat The peripheral fat is the next layer after the skin from the outside of the body; varies in thickness from 3 to 8 mm in children. Fat has a mean CT value of µ = -90 HU with σ =18 HU. Voxels within a distance of 8 mm from the inner skin boundary are examined; if they fall within the range -90 ± 2 18 HU, they are classified as peripheral fat. 80
81 Removal of the Peripheral Muscle Peripheral muscle has a mean CT value of µ = + 44 HU with σ =14 HU; thickness varies from 6 to10 mm. Voxels found within 10 mm from the inner boundary of peripheral fat and within the range 44 ± 2 14 HU are classified as peripheral muscle. The peripheral fat region obtained is dilated using a diskshaped structuring element of radius 2 mm to remove discontinuities and holes between the peripheral fat and the peripheral muscle. 81




82 Preprocessing Steps Removal of peripheral artifacts and tissues: before processing peripheral artifacts the skin layer the peripheral fat region the peripheral muscle after processing




83 Preprocessing Steps Surface after removal of: peripheral artifacts the skin layer the peripheral fat the peripheral muscle 83
84 Segmentation of the Rib Structure Initial segmentation performed using thresholding at 200 HU, morphological erosion and closing, information related to the peripheral fat boundary, several features of each thresholded region on each slice: Euclidean distances, compactness, length and width of each region. 84
85 Segmentation of the Rib Structure Initial result of segmentation used as a marker to perform opening-by-reconstruction. Refined using the features defined previously, defined central line, and an elliptical region obtained adaptively inside the ribs on each slice. 85


86 Results: Rib Structure Produced good results without including parts of tumors or other organs. 86
87 Segmentation of the Vertebral Column Segmentation performed using: the information related to the ribs and the inner boundary of the peripheral fat region, thresholding at 180 HU, the gradient magnitude, and morphological erosion, dilation, and closing. 87

88 Segmentation of the Vertebral Column A pre-processed CT slice After thresholding and removing the ribs Initial result of segmentation Binarized gradient of the detected region Region obtained applying the combined mask Final result of segmentation 88
89 Results: Vertebral Column The results of segmentation compared to manual segmentation performed by a radiologist. --- contours drawn by a radiologist --- contours obtained by the proposed methods 89
90 Results: Vertebral Column Quantitative assessment: Number of CT exams: 13 (of 6 patients) Number of selected slices: 458 Average MDCP: 0.73 mm Average Hausdorff distance: 3.17 mm 90
91 Segmentation of the Spinal Canal CT volume after removing external air, peripheral artifacts, the skin, and the peripheral fat region Remove peripheral muscle Detect the rib structure Detect the vertebral column Crop image volume containing the vertebral column Compute edge map; apply the Hough transform to detect the best-fitting circle for each slice Detect seed voxels; calculate parameters for fuzzy region growing Grow fuzzy spinal region; threshold volume and close using morphological operators and convex hull Detected spinal canal region 91
92 Spinal Canal: Detection of Seed Voxels The Hough transform was used to detect the best-fitting circle in the spinal canal. The radius of the circle was limited to 6 to 10 mm. The vertebral column and the rib structure were used to delimit the search range for seed voxels. The center of the detected best-fitting circle with HU values in the range 23 ± 2 15 considered as a seed. 92

93 Spinal Canal: Detection of Seed Voxels Cropped V.C. Original image V.C.: vertebral column Edge map Detected best-fitting circle and its center 93


94 Spinal Canal: Detection of Seed Voxels * c=15 pixels =6.15 mm c=16 pixels =6.56 mm c=17 pixels =6.97 mm c=18 pixels =7.38 mm c=19 pixels =7.79 mm c=21 pixels =8.61 mm 94
95 Spinal Canal: Detection of Seed Voxels Original image Cropped V.C. Edge map Candidate circles 95
96 Spinal Canal: Detection of Seed Voxels * * * * * c=13 pixels =7.15 mm c=14 pixels =7.70 mm c=20 pixels =11.00 mm c=21 pixels =11.55 mm 96
97 Segmentation of the Spinal Canal Segmentation performed using fuzzy mapping and opening-by-reconstruction. The detected seed voxels from a number of slices in the thoracic region were used as markers. The mean and the standard deviation calculated within the neighborhood of 21 x 21 pixels of each of the seed voxels. The result morphologically closed using a tubular structuring element with radius 2 mm and height 10 mm, and the convex hull. 97


98 Results: Spinal Canal --- contours drawn by a radiologist --- contours obtained by the proposed methods 98

99 Results: Spinal Canal Quantitative assessment: Number of CT exams: 3 Number of selected slices: 21 Average MDCP: 0.62 mm Average Hausdorff distance: 1.60 mm 99
100 Diaphragm Double-domed muscle separating the thorax from the abdomen. Directly below the lungs: extract the lower surfaces of the lungs and use them to obtain the diaphragm. Model each dome using linear least-squares and obtain final representation using deformable contours. 100
101 Delineation of the Diaphragm Original CT volume Remove external air, peripheral artifacts, and the skin Segment the lungs Extract the lower surface of the lungs Apply the linear least squares (LLS) estimation procedure Remove peripheral fat, peripheral muscle, the ribs, and the spine Refine diaphragm model using active contours Diaphragm surface 101
102 Segmentation of the Lungs Easily distinguishable from the rest of body. The lungs form the single-largest volume of air in the body. Iterative procedure to determine the optimal threshold: Procedure modified for children to exclude air regions inside bowels. 102



103 Segmentation of the Lungs: Results 103
104 Delineation of the Diaphragm Representation of the diaphragm using LLS: right-dome surface left-dome surface 104
105 Delineation of the Diaphragm Representation of the diaphragm using LLS and active contours: combined surface after applying active contour 105

106 Delineation of the Diaphragm Representation of the diaphragm using LLS and active contours: Segmented lungs and the diaphragm 106

107 Results: Diaphragm --- contours drawn by a radiologist --- contours obtained by the proposed methods 107
108 Results: Diaphragm Quantitative assessment: Number of CT exams: 11 (of six patients) Number of selected slices: 109 Average MDCP in 3D: 6.05 mm Average maximum Hausdorff distance in 3D: mm 108


109 Removal of the Thoracic Cavity 109

110 Delineation of the Pelvic Girdle Automatic detection of seed voxels using information related to the spinal canal, the vertebral column, and the peripheral fat boundary. 110

111 Delineation of the Pelvic Girdle Automatic segmentation performed using fuzzy mapping and opening-by-reconstruction (in 3D). 111



112 Results: Pelvic Girdle -- contours drawn by a radiologist -- contours obtained by the proposed methods 112
113 Results: Pelvic Girdle Quantitative assessment: Number of CT exams: 13 (of six patients) Number of selected slices: 277 Average MDCP in 3D: 0.53 mm Average maximum Hausdorff distance in 3D: 5.95 mm 113


114 Modeling the Upper Surface of the Pelvic Girdle Representation of the upper surface of the pelvic girdle using the LLS model and active contours: Linear least-squares model Refined pelvic surface 114


115 Removal of the Pelvic Cavity 115

116 Results: Landmarks Identified 116

117 Application to the Segmentation of Neuroblastic Tumors Neuroblastoma Malignant tumor Originates along the sympathetic ganglia or in the adrenal medulla. Accounts for 8 10% of all childhood cancers. 65% of the tumors are located in the abdomen. Sympathetic Ganglia Pelvis Adrenal Medulla 117
, viable tumor (medium")
118 CT Image of Neuroblastoma Abdominal tumors are most common: the worst prognosis. Generally heterogeneous, with a mixture of: calcification viable tumor necrosis necrosis (low density), viable tumor (medium density), calcification (high density). 118


119 Tumor Response to Therapy Tumor shrinks Intermediate density: active or viable tumor Low density: necrosis High density: calcified tissue April 2001 June 2001 September

120 Tumor mass enclosing the aorta: unresectable 120
121 Clinical and Image-based Analysis 121
122 Original CT volume Removal of external air, peripheral artifacts, and the skin layer Removal of the peripheral fat region Removal of the peripheral muscle Segmentation of the rib structure Segmentation of the vertebral column Segmentation of the spinal canal; removal of the vertebral column Delineation of the pelvic girdle; removal of the pelvic cavity Removal of the spinal canal Segmentation of the lungs Delineation of the diaphragm; removal of the thoracic cavity Fuzzy segmentation of the tumor; threshold Segmented tumor volume 122
123 Segmentation of the Tumor 1. A region within the tumor mass manually selected. 2. Region statistics, µ R and σ R, calculated. 3. Data volume mapped using fuzzy mapping function f M ( r) = exp 1 2 r µ R σ R 2 where r is an arbitrary pixel in the image. 123
124 Segmentation of the Tumor 4. The selected region is used as a region marker 5. Reconstruction performed to obtain graded connected components using fuzzy-mapped image as mask and the region marker 6. Image thresholded using R R T = µ + 0.5σ 124

125 Segmentation of Neuroblastoma: Homogeneous Tumor a b a. tumor segmented by a radiologist c d b. user-selected region marker c. result of openingby-reconstruction d. final result of segmentation 125

126 Segmentation of Neuroblastoma: Heterogeneous Tumor a c b d a. tumor segmented by a radiologist b. user-selected region marker c. result of openingby-reconstruction d. final result of segmentation 126

127 Segmentation of Neuroblastoma: Diffuse Tumor a b a. tumor segmented by a radiologist c d b. user-selected region marker c. result of openingby-reconstruction d. final result of segmentation 127

128 Result of Segmentation: Homogeneous Tumor Tumor segmented by a radiologist Initial result of tumor segmentation After removal of the thoracic cavity After removal of regions below the pelvic surface 128

129 Result of Segmentation: Heterogeneous Tumor Tumor segmented by a radiologist Initial result of tumor segmentation After removal of the thoracic cavity After removal of regions below the pelvic surface 129



130 Result of Segmentation: Diffuse Tumor Tumor segmented by a radiologist Initial result of tumor After removal of the segmentation thoracic cavity After removal of regions below the pelvic surface 130

131 Results 131
132 Results Effect of removal of the thoracic cavity: false-positive rate reduced by 8.3%, on the average, over 10 CT exams of four patients. Effect of removal of the vertebral column and the regions below the pelvic surface: false-positive rate reduced by 10.3%, on the average. True-positive rate: 82.1%, on the average. 132
133 Conclusion The proposed methods: separate the thoracic, abdominal, and pelvic cavities for further consideration; facilitate atlas-based and landmark-based approaches to segmentation of medical images; aid in reducing the false-positive error rate in the result of segmentation of tumors. 133
134 Future work Incorporation of other abdominal, thoracic, and pelvic landmarks. Extension of the methods to other imaging modalities. Implementation of competitive region growing for segmentation of multiple organs and tumors. Estimation of tissue composition in tumor mass using Gaussian mixture model. 134
135 Thank you This work is supported by a grant from the Natural Sciences and Engineering Research Council (NSERC) of Canada. We thank Hanford Deglint and Randy Vu for their contributions to this project.
Image Processing. BITS Pilani. Dr Jagadish Nayak. Dubai Campus
 Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
Morphological Image Processing
 Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
Morphological Image Processing Binary image processing In binary images, we conventionally take background as black (0) and foreground objects as white (1 or 255) Morphology Figure 4.1 objects on a conveyor
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Mathematical Morphology and Distance Transforms. Robin Strand
 Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Mathematical Morphology and Distance Transforms Robin Strand robin.strand@it.uu.se Morphology Form and structure Mathematical framework used for: Pre-processing Noise filtering, shape simplification,...
Morphological Image Processing
 Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
Morphological Image Processing Morphology Identification, analysis, and description of the structure of the smallest unit of words Theory and technique for the analysis and processing of geometric structures
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
Ulrik Söderström 16 Feb Image Processing. Segmentation
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 16 Feb 2011 Image Processing Segmentation What is Image Segmentation? To be able to extract information from an image it is common to subdivide it into background
Biomedical Image Analysis. Point, Edge and Line Detection
 Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Computer Vision. Image Segmentation. 10. Segmentation. Computer Engineering, Sejong University. Dongil Han
 Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Automated segmentation methods for liver analysis in oncology applications
 University of Szeged Department of Image Processing and Computer Graphics Automated segmentation methods for liver analysis in oncology applications Ph. D. Thesis László Ruskó Thesis Advisor Dr. Antal
University of Szeged Department of Image Processing and Computer Graphics Automated segmentation methods for liver analysis in oncology applications Ph. D. Thesis László Ruskó Thesis Advisor Dr. Antal
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
Edge detection. Stefano Ferrari. Università degli Studi di Milano Elaborazione delle immagini (Image processing I)
") Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
Edge detection Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Image segmentation Several image processing
EECS490: Digital Image Processing. Lecture #19
 Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Chapter 10: Image Segmentation. Office room : 841
 Chapter 10: Image Segmentation Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cn Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Contents Definition and methods classification
Chapter 10: Image Segmentation Lecturer: Jianbing Shen Email : shenjianbing@bit.edu.cn Office room : 841 http://cs.bit.edu.cn/shenjianbing cn/shenjianbing Contents Definition and methods classification
Modern Medical Image Analysis 8DC00 Exam
 Parts of answers are inside square brackets [... ]. These parts are optional. Answers can be written in Dutch or in English, as you prefer. You can use drawings and diagrams to support your textual answers.
Parts of answers are inside square brackets [... ]. These parts are optional. Answers can be written in Dutch or in English, as you prefer. You can use drawings and diagrams to support your textual answers.
Biomedical Image Analysis. Mathematical Morphology
 Biomedical Image Analysis Mathematical Morphology Contents: Foundation of Mathematical Morphology Structuring Elements Applications BMIA 15 V. Roth & P. Cattin 265 Foundations of Mathematical Morphology
Biomedical Image Analysis Mathematical Morphology Contents: Foundation of Mathematical Morphology Structuring Elements Applications BMIA 15 V. Roth & P. Cattin 265 Foundations of Mathematical Morphology
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
09/11/2017. Morphological image processing. Morphological image processing. Morphological image processing. Morphological image processing (binary)
") Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Adaptive Fuzzy Connectedness-Based Medical Image Segmentation
 Adaptive Fuzzy Connectedness-Based Medical Image Segmentation Amol Pednekar Ioannis A. Kakadiaris Uday Kurkure Visual Computing Lab, Dept. of Computer Science, Univ. of Houston, Houston, TX, USA apedneka@bayou.uh.edu
Adaptive Fuzzy Connectedness-Based Medical Image Segmentation Amol Pednekar Ioannis A. Kakadiaris Uday Kurkure Visual Computing Lab, Dept. of Computer Science, Univ. of Houston, Houston, TX, USA apedneka@bayou.uh.edu
(10) Image Segmentation
 Image Segmentation") (0) Image Segmentation - Image analysis Low-level image processing: inputs and outputs are all images Mid-/High-level image processing: inputs are images; outputs are information or attributes of the images
(0) Image Segmentation - Image analysis Low-level image processing: inputs and outputs are all images Mid-/High-level image processing: inputs are images; outputs are information or attributes of the images
 DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
MR IMAGE SEGMENTATION
 MR IMAGE SEGMENTATION Prepared by : Monil Shah What is Segmentation? Partitioning a region or regions of interest in images such that each region corresponds to one or more anatomic structures Classification
MR IMAGE SEGMENTATION Prepared by : Monil Shah What is Segmentation? Partitioning a region or regions of interest in images such that each region corresponds to one or more anatomic structures Classification
Morphological Image Processing
 Morphological Image Processing Ranga Rodrigo October 9, 29 Outline Contents Preliminaries 2 Dilation and Erosion 3 2. Dilation.............................................. 3 2.2 Erosion..............................................
Morphological Image Processing Ranga Rodrigo October 9, 29 Outline Contents Preliminaries 2 Dilation and Erosion 3 2. Dilation.............................................. 3 2.2 Erosion..............................................
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Computer-aided Diagnosis of Retinopathy of Prematurity
 Computer-aided Diagnosis of Retinopathy of Prematurity Rangaraj M. Rangayyan, Faraz Oloumi, and Anna L. Ells Department of Electrical and Computer Engineering, University of Calgary Alberta Children's
Computer-aided Diagnosis of Retinopathy of Prematurity Rangaraj M. Rangayyan, Faraz Oloumi, and Anna L. Ells Department of Electrical and Computer Engineering, University of Calgary Alberta Children's
Registration-Based Segmentation of Medical Images
 School of Computing National University of Singapore Graduate Research Paper Registration-Based Segmentation of Medical Images by Li Hao under guidance of A/Prof. Leow Wee Kheng July, 2006 Abstract Medical
School of Computing National University of Singapore Graduate Research Paper Registration-Based Segmentation of Medical Images by Li Hao under guidance of A/Prof. Leow Wee Kheng July, 2006 Abstract Medical
Lecture: Segmentation I FMAN30: Medical Image Analysis. Anders Heyden
 Lecture: Segmentation I FMAN30: Medical Image Analysis Anders Heyden 2017-11-13 Content What is segmentation? Motivation Segmentation methods Contour-based Voxel/pixel-based Discussion What is segmentation?
Lecture: Segmentation I FMAN30: Medical Image Analysis Anders Heyden 2017-11-13 Content What is segmentation? Motivation Segmentation methods Contour-based Voxel/pixel-based Discussion What is segmentation?
CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION
 60 CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION 3.1 IMPORTANCE OF OPTIC DISC Ocular fundus images provide information about ophthalmic, retinal and even systemic diseases such as hypertension, diabetes, macular
60 CHAPTER 3 RETINAL OPTIC DISC SEGMENTATION 3.1 IMPORTANCE OF OPTIC DISC Ocular fundus images provide information about ophthalmic, retinal and even systemic diseases such as hypertension, diabetes, macular
EECS490: Digital Image Processing. Lecture #17
 Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
Segmentation of Images
 Segmentation of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is a
Segmentation of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is a
11/10/2011 small set, B, to probe the image under study for each SE, define origo & pixels in SE
 Mathematical Morphology Sonka 13.1-13.6 Ida-Maria Sintorn ida@cb.uu.se Today s lecture SE, morphological transformations inary MM Gray-level MM Applications Geodesic transformations Morphology-form and
Mathematical Morphology Sonka 13.1-13.6 Ida-Maria Sintorn ida@cb.uu.se Today s lecture SE, morphological transformations inary MM Gray-level MM Applications Geodesic transformations Morphology-form and
Line, edge, blob and corner detection
 Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Image Analysis. Morphological Image Analysis
 Image Analysis Morphological Image Analysis Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008 University of Ioannina - Department
Image Analysis Morphological Image Analysis Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008 University of Ioannina - Department
CHAPTER 6 DETECTION OF MASS USING NOVEL SEGMENTATION, GLCM AND NEURAL NETWORKS
 130 CHAPTER 6 DETECTION OF MASS USING NOVEL SEGMENTATION, GLCM AND NEURAL NETWORKS A mass is defined as a space-occupying lesion seen in more than one projection and it is described by its shapes and margin
130 CHAPTER 6 DETECTION OF MASS USING NOVEL SEGMENTATION, GLCM AND NEURAL NETWORKS A mass is defined as a space-occupying lesion seen in more than one projection and it is described by its shapes and margin
Segmentation algorithm for monochrome images generally are based on one of two basic properties of gray level values: discontinuity and similarity.
 Chapter - 3 : IMAGE SEGMENTATION Segmentation subdivides an image into its constituent s parts or objects. The level to which this subdivision is carried depends on the problem being solved. That means
Chapter - 3 : IMAGE SEGMENTATION Segmentation subdivides an image into its constituent s parts or objects. The level to which this subdivision is carried depends on the problem being solved. That means
Knowledge-Based Organ Identification from CT Images. Masahara Kobashi and Linda Shapiro Best-Paper Prize in Pattern Recognition Vol. 28, No.
 Knowledge-Based Organ Identification from CT Images Masahara Kobashi and Linda Shapiro Best-Paper Prize in Pattern Recognition Vol. 28, No. 4 1995 1 Motivation The extraction of structure from CT volumes
Knowledge-Based Organ Identification from CT Images Masahara Kobashi and Linda Shapiro Best-Paper Prize in Pattern Recognition Vol. 28, No. 4 1995 1 Motivation The extraction of structure from CT volumes
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Image segmentation. Stefano Ferrari. Università degli Studi di Milano Methods for Image Processing. academic year
 Image segmentation Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 2017 2018 Segmentation by thresholding Thresholding is the simplest
Image segmentation Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 2017 2018 Segmentation by thresholding Thresholding is the simplest
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
CHAPTER-4 LOCALIZATION AND CONTOUR DETECTION OF OPTIC DISK
 CHAPTER-4 LOCALIZATION AND CONTOUR DETECTION OF OPTIC DISK Ocular fundus images can provide information about ophthalmic, retinal and even systemic diseases such as hypertension, diabetes, macular degeneration
CHAPTER-4 LOCALIZATION AND CONTOUR DETECTION OF OPTIC DISK Ocular fundus images can provide information about ophthalmic, retinal and even systemic diseases such as hypertension, diabetes, macular degeneration
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Basic relations between pixels (Chapter 2)
") Basic relations between pixels (Chapter 2) Lecture 3 Basic Relationships Between Pixels Definitions: f(x,y): digital image Pixels: q, p (p,q f) A subset of pixels of f(x,y): S A typology of relations:
Basic relations between pixels (Chapter 2) Lecture 3 Basic Relationships Between Pixels Definitions: f(x,y): digital image Pixels: q, p (p,q f) A subset of pixels of f(x,y): S A typology of relations:
morphology on binary images
 morphology on binary images Ole-Johan Skrede 10.05.2017 INF2310 - Digital Image Processing Department of Informatics The Faculty of Mathematics and Natural Sciences University of Oslo After original slides
morphology on binary images Ole-Johan Skrede 10.05.2017 INF2310 - Digital Image Processing Department of Informatics The Faculty of Mathematics and Natural Sciences University of Oslo After original slides
Binary Shape Characterization using Morphological Boundary Class Distribution Functions
 Binary Shape Characterization using Morphological Boundary Class Distribution Functions Marcin Iwanowski Institute of Control and Industrial Electronics, Warsaw University of Technology, ul.koszykowa 75,
Binary Shape Characterization using Morphological Boundary Class Distribution Functions Marcin Iwanowski Institute of Control and Industrial Electronics, Warsaw University of Technology, ul.koszykowa 75,
1. What are the derivative operators useful in image segmentation? Explain their role in segmentation.
 1. What are the derivative operators useful in image segmentation? Explain their role in segmentation. Gradient operators: First-order derivatives of a digital image are based on various approximations
1. What are the derivative operators useful in image segmentation? Explain their role in segmentation. Gradient operators: First-order derivatives of a digital image are based on various approximations
Image segmentation via fuzzy object extraction and edge detection and its medical application
 Journal of X-Ray Science and Technology 10 (2002) 95 106 95 IOS Press Image segmentation via fuzzy object extraction and edge detection and its medical application Yao Lin, Jie Tian and Huiguang He AI
Journal of X-Ray Science and Technology 10 (2002) 95 106 95 IOS Press Image segmentation via fuzzy object extraction and edge detection and its medical application Yao Lin, Jie Tian and Huiguang He AI
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Filtering Images. Contents
 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Chapter 10 Image Segmentation. Yinghua He
 Chapter 10 Image Segmentation Yinghua He The whole is equal to the sum of its parts. -Euclid The whole is greater than the sum of its parts. -Max Wertheimer The Whole is Not Equal to the Sum of Its Parts:
Chapter 10 Image Segmentation Yinghua He The whole is equal to the sum of its parts. -Euclid The whole is greater than the sum of its parts. -Max Wertheimer The Whole is Not Equal to the Sum of Its Parts:
Introduction. Computer Vision & Digital Image Processing. Preview. Basic Concepts from Set Theory
 Introduction Computer Vision & Digital Image Processing Morphological Image Processing I Morphology a branch of biology concerned with the form and structure of plants and animals Mathematical morphology
Introduction Computer Vision & Digital Image Processing Morphological Image Processing I Morphology a branch of biology concerned with the form and structure of plants and animals Mathematical morphology
Image Segmentation. Ross Whitaker SCI Institute, School of Computing University of Utah
 Image Segmentation Ross Whitaker SCI Institute, School of Computing University of Utah What is Segmentation? Partitioning images/volumes into meaningful pieces Partitioning problem Labels Isolating a specific
Image Segmentation Ross Whitaker SCI Institute, School of Computing University of Utah What is Segmentation? Partitioning images/volumes into meaningful pieces Partitioning problem Labels Isolating a specific
Image Segmentation and Registration
 Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Operators-Based on Second Derivative double derivative Laplacian operator Laplacian Operator Laplacian Of Gaussian (LOG) Operator LOG
 Operator LOG") Operators-Based on Second Derivative The principle of edge detection based on double derivative is to detect only those points as edge points which possess local maxima in the gradient values. Laplacian
Operators-Based on Second Derivative The principle of edge detection based on double derivative is to detect only those points as edge points which possess local maxima in the gradient values. Laplacian
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Lecture 7: Most Common Edge Detectors
 #1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
#1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
Edge detection. Gradient-based edge operators
 Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Morphological Image Processing
 Morphological Image Processing Binary dilation and erosion" Set-theoretic interpretation" Opening, closing, morphological edge detectors" Hit-miss filter" Morphological filters for gray-level images" Cascading
Morphological Image Processing Binary dilation and erosion" Set-theoretic interpretation" Opening, closing, morphological edge detectors" Hit-miss filter" Morphological filters for gray-level images" Cascading
Biomedical Image Processing
 Biomedical Image Processing Jason Thong Gabriel Grant 1 2 Motivation from the Medical Perspective MRI, CT and other biomedical imaging devices were designed to assist doctors in their diagnosis and treatment
Biomedical Image Processing Jason Thong Gabriel Grant 1 2 Motivation from the Medical Perspective MRI, CT and other biomedical imaging devices were designed to assist doctors in their diagnosis and treatment
Norbert Schuff VA Medical Center and UCSF
 Norbert Schuff Medical Center and UCSF Norbert.schuff@ucsf.edu Medical Imaging Informatics N.Schuff Course # 170.03 Slide 1/67 Objective Learn the principle segmentation techniques Understand the role
Norbert Schuff Medical Center and UCSF Norbert.schuff@ucsf.edu Medical Imaging Informatics N.Schuff Course # 170.03 Slide 1/67 Objective Learn the principle segmentation techniques Understand the role
MEDICAL IMAGE NOISE REDUCTION AND REGION CONTRAST ENHANCEMENT USING PARTIAL DIFFERENTIAL EQUATIONS
 MEDICAL IMAGE NOISE REDUCTION AND REGION CONTRAST ENHANCEMENT USING PARTIAL DIFFERENTIAL EQUATIONS Miguel Alemán-Flores, Luis Álvarez-León Departamento de Informática y Sistemas, Universidad de Las Palmas
MEDICAL IMAGE NOISE REDUCTION AND REGION CONTRAST ENHANCEMENT USING PARTIAL DIFFERENTIAL EQUATIONS Miguel Alemán-Flores, Luis Álvarez-León Departamento de Informática y Sistemas, Universidad de Las Palmas
Example 1: Regions. Image Segmentation. Example 3: Lines and Circular Arcs. Example 2: Straight Lines. Region Segmentation: Segmentation Criteria
 Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example 1: Regions. into linear
Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example 1: Regions. into linear
Example 2: Straight Lines. Image Segmentation. Example 3: Lines and Circular Arcs. Example 1: Regions
 Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example : Straight Lines. into
Image Segmentation Image segmentation is the operation of partitioning an image into a collection of connected sets of pixels. 1. into regions, which usually cover the image Example : Straight Lines. into
Processing of binary images
 Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Introduction to Medical Imaging (5XSA0) Module 5
 Module 5") Introduction to Medical Imaging (5XSA0) Module 5 Segmentation Jungong Han, Dirk Farin, Sveta Zinger ( s.zinger@tue.nl ) 1 Outline Introduction Color Segmentation region-growing region-merging watershed
Introduction to Medical Imaging (5XSA0) Module 5 Segmentation Jungong Han, Dirk Farin, Sveta Zinger ( s.zinger@tue.nl ) 1 Outline Introduction Color Segmentation region-growing region-merging watershed
Motion artifact detection in four-dimensional computed tomography images
 Motion artifact detection in four-dimensional computed tomography images G Bouilhol 1,, M Ayadi, R Pinho, S Rit 1, and D Sarrut 1, 1 University of Lyon, CREATIS; CNRS UMR 5; Inserm U144; INSA-Lyon; University
Motion artifact detection in four-dimensional computed tomography images G Bouilhol 1,, M Ayadi, R Pinho, S Rit 1, and D Sarrut 1, 1 University of Lyon, CREATIS; CNRS UMR 5; Inserm U144; INSA-Lyon; University
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
An Automated Image-based Method for Multi-Leaf Collimator Positioning Verification in Intensity Modulated Radiation Therapy
 An Automated Image-based Method for Multi-Leaf Collimator Positioning Verification in Intensity Modulated Radiation Therapy Chenyang Xu 1, Siemens Corporate Research, Inc., Princeton, NJ, USA Xiaolei Huang,
An Automated Image-based Method for Multi-Leaf Collimator Positioning Verification in Intensity Modulated Radiation Therapy Chenyang Xu 1, Siemens Corporate Research, Inc., Princeton, NJ, USA Xiaolei Huang,
ECEN 447 Digital Image Processing
 ECEN 447 Digital Image Processing Lecture 7: Mathematical Morphology Ulisses Braga-Neto ECE Department Texas A&M University Basics of Mathematical Morphology Mathematical Morphology (MM) is a discipline
ECEN 447 Digital Image Processing Lecture 7: Mathematical Morphology Ulisses Braga-Neto ECE Department Texas A&M University Basics of Mathematical Morphology Mathematical Morphology (MM) is a discipline
Segmentation and Modeling of the Spinal Cord for Reality-based Surgical Simulator
 Segmentation and Modeling of the Spinal Cord for Reality-based Surgical Simulator Li X.C.,, Chui C. K.,, and Ong S. H.,* Dept. of Electrical and Computer Engineering Dept. of Mechanical Engineering, National
Segmentation and Modeling of the Spinal Cord for Reality-based Surgical Simulator Li X.C.,, Chui C. K.,, and Ong S. H.,* Dept. of Electrical and Computer Engineering Dept. of Mechanical Engineering, National
Filters. Advanced and Special Topics: Filters. Filters
 Filters Advanced and Special Topics: Filters Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong Kong ELEC4245: Digital Image Processing (Second Semester, 2016 17)
Filters Advanced and Special Topics: Filters Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong Kong ELEC4245: Digital Image Processing (Second Semester, 2016 17)
The MAGIC-5 CAD for nodule detection in low dose and thin slice lung CT. Piergiorgio Cerello - INFN
 The MAGIC-5 CAD for nodule detection in low dose and thin slice lung CT Piergiorgio Cerello - INFN Frascati, 27/11/2009 Computer Assisted Detection (CAD) MAGIC-5 & Distributed Computing Infrastructure
The MAGIC-5 CAD for nodule detection in low dose and thin slice lung CT Piergiorgio Cerello - INFN Frascati, 27/11/2009 Computer Assisted Detection (CAD) MAGIC-5 & Distributed Computing Infrastructure
Review on Different Segmentation Techniques For Lung Cancer CT Images
 Review on Different Segmentation Techniques For Lung Cancer CT Images Arathi 1, Anusha Shetty 1, Madhushree 1, Chandini Udyavar 1, Akhilraj.V.Gadagkar 2 1 UG student, Dept. Of CSE, Srinivas school of engineering,
Review on Different Segmentation Techniques For Lung Cancer CT Images Arathi 1, Anusha Shetty 1, Madhushree 1, Chandini Udyavar 1, Akhilraj.V.Gadagkar 2 1 UG student, Dept. Of CSE, Srinivas school of engineering,
Application of fuzzy set theory in image analysis. Nataša Sladoje Centre for Image Analysis
 Application of fuzzy set theory in image analysis Nataša Sladoje Centre for Image Analysis Our topics for today Crisp vs fuzzy Fuzzy sets and fuzzy membership functions Fuzzy set operators Approximate
Application of fuzzy set theory in image analysis Nataša Sladoje Centre for Image Analysis Our topics for today Crisp vs fuzzy Fuzzy sets and fuzzy membership functions Fuzzy set operators Approximate
Object Identification in Ultrasound Scans
 Object Identification in Ultrasound Scans Wits University Dec 05, 2012 Roadmap Introduction to the problem Motivation Related Work Our approach Expected Results Introduction Nowadays, imaging devices like
Object Identification in Ultrasound Scans Wits University Dec 05, 2012 Roadmap Introduction to the problem Motivation Related Work Our approach Expected Results Introduction Nowadays, imaging devices like
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Image Segmentation. Shengnan Wang
 Image Segmentation Shengnan Wang shengnan@cs.wisc.edu Contents I. Introduction to Segmentation II. Mean Shift Theory 1. What is Mean Shift? 2. Density Estimation Methods 3. Deriving the Mean Shift 4. Mean
Image Segmentation Shengnan Wang shengnan@cs.wisc.edu Contents I. Introduction to Segmentation II. Mean Shift Theory 1. What is Mean Shift? 2. Density Estimation Methods 3. Deriving the Mean Shift 4. Mean
Part 3: Image Processing
 Part 3: Image Processing Image Filtering and Segmentation Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 60 1 Image filtering 2 Median filtering 3 Mean filtering 4 Image segmentation
Part 3: Image Processing Image Filtering and Segmentation Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 60 1 Image filtering 2 Median filtering 3 Mean filtering 4 Image segmentation
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
Image representation. 1. Introduction
 Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
Comparison of Vessel Segmentations using STAPLE
 Comparison of Vessel Segmentations using STAPLE Julien Jomier, Vincent LeDigarcher, and Stephen R. Aylward Computer-Aided Diagnosis and Display Lab The University of North Carolina at Chapel Hill, Department
Comparison of Vessel Segmentations using STAPLE Julien Jomier, Vincent LeDigarcher, and Stephen R. Aylward Computer-Aided Diagnosis and Display Lab The University of North Carolina at Chapel Hill, Department
Unsupervised Learning and Clustering
 Unsupervised Learning and Clustering Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Spring 2009 CS 551, Spring 2009 c 2009, Selim Aksoy (Bilkent University)
Unsupervised Learning and Clustering Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Spring 2009 CS 551, Spring 2009 c 2009, Selim Aksoy (Bilkent University)
Fundamentals of Digital Image Processing
 \L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
\L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
MEDICAL IMAGE COMPUTING (CAP 5937) LECTURE 9: Medical Image Segmentation (III) (Fuzzy Connected Image Segmentation)
 LECTURE 9: Medical Image Segmentation (III) (Fuzzy Connected Image Segmentation)") SPRING 2017 1 MEDICAL IMAGE COMPUTING (CAP 5937) LECTURE 9: Medical Image Segmentation (III) (Fuzzy Connected Image Segmentation) Dr. Ulas Bagci HEC 221, Center for Research in Computer Vision (CRCV),
SPRING 2017 1 MEDICAL IMAGE COMPUTING (CAP 5937) LECTURE 9: Medical Image Segmentation (III) (Fuzzy Connected Image Segmentation) Dr. Ulas Bagci HEC 221, Center for Research in Computer Vision (CRCV),
Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections.
 Image Interpolation 48 Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections. Fundamentally, interpolation is the process of using known
Image Interpolation 48 Interpolation is a basic tool used extensively in tasks such as zooming, shrinking, rotating, and geometric corrections. Fundamentally, interpolation is the process of using known
Unsupervised Learning and Clustering
 Unsupervised Learning and Clustering Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Spring 2008 CS 551, Spring 2008 c 2008, Selim Aksoy (Bilkent University)
Unsupervised Learning and Clustering Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Spring 2008 CS 551, Spring 2008 c 2008, Selim Aksoy (Bilkent University)
Extraction and recognition of the thoracic organs based on 3D CT images and its application
 1 Extraction and recognition of the thoracic organs based on 3D CT images and its application Xiangrong Zhou, PhD a, Takeshi Hara, PhD b, Hiroshi Fujita, PhD b, Yoshihiro Ida, RT c, Kazuhiro Katada, MD
1 Extraction and recognition of the thoracic organs based on 3D CT images and its application Xiangrong Zhou, PhD a, Takeshi Hara, PhD b, Hiroshi Fujita, PhD b, Yoshihiro Ida, RT c, Kazuhiro Katada, MD
MIXTURE MODELING FOR DIGITAL MAMMOGRAM DISPLAY AND ANALYSIS 1
 MIXTURE MODELING FOR DIGITAL MAMMOGRAM DISPLAY AND ANALYSIS 1 Stephen R. Aylward, Bradley M. Hemminger, and Etta D. Pisano Department of Radiology Medical Image Display and Analysis Group University of
MIXTURE MODELING FOR DIGITAL MAMMOGRAM DISPLAY AND ANALYSIS 1 Stephen R. Aylward, Bradley M. Hemminger, and Etta D. Pisano Department of Radiology Medical Image Display and Analysis Group University of
Computer-Aided Diagnosis in Abdominal and Cardiac Radiology Using Neural Networks
 Computer-Aided Diagnosis in Abdominal and Cardiac Radiology Using Neural Networks Du-Yih Tsai, Masaru Sekiya and Yongbum Lee Department of Radiological Technology, School of Health Sciences, Faculty of
Computer-Aided Diagnosis in Abdominal and Cardiac Radiology Using Neural Networks Du-Yih Tsai, Masaru Sekiya and Yongbum Lee Department of Radiological Technology, School of Health Sciences, Faculty of
Artistic Stylization of Images and Video Part III Anisotropy and Filtering Eurographics 2011
 Artistic Stylization of Images and Video Part III Anisotropy and Filtering Eurographics 2011 Hasso-Plattner-Institut, University of Potsdam, Germany Image/Video Abstraction Stylized Augmented Reality for
Artistic Stylization of Images and Video Part III Anisotropy and Filtering Eurographics 2011 Hasso-Plattner-Institut, University of Potsdam, Germany Image/Video Abstraction Stylized Augmented Reality for
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
3D VISUALIZATION OF SEGMENTED CRUCIATE LIGAMENTS 1. INTRODUCTION
 JOURNAL OF MEDICAL INFORMATICS & TECHNOLOGIES Vol. 10/006, ISSN 164-6037 Paweł BADURA * cruciate ligament, segmentation, fuzzy connectedness,3d visualization 3D VISUALIZATION OF SEGMENTED CRUCIATE LIGAMENTS
JOURNAL OF MEDICAL INFORMATICS & TECHNOLOGIES Vol. 10/006, ISSN 164-6037 Paweł BADURA * cruciate ligament, segmentation, fuzzy connectedness,3d visualization 3D VISUALIZATION OF SEGMENTED CRUCIATE LIGAMENTS
Ch. 4 Physical Principles of CT
 Ch. 4 Physical Principles of CT CLRS 408: Intro to CT Department of Radiation Sciences Review: Why CT? Solution for radiography/tomography limitations Superimposition of structures Distinguishing between
Ch. 4 Physical Principles of CT CLRS 408: Intro to CT Department of Radiation Sciences Review: Why CT? Solution for radiography/tomography limitations Superimposition of structures Distinguishing between