Real-Time Simulation of Simscape Models
|
|
|
- Oliver Black
- 6 years ago
- Views:
Transcription



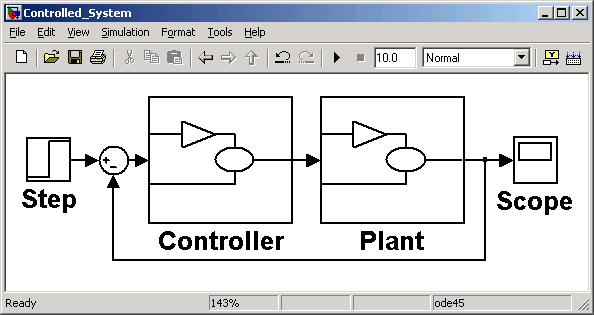
1 2010 The MathWorks, Inc. Real-Time Simulation of Simscape Models Vehicle Dynamics Motor Planetary Gear Electric Motor Electric Generator DC-DC Converter Battery Controller Hybrid Electric Vehicle Wit ursilo Application Engineer, Physical Modeling MathWorks


2 Challenge Limited power Max real-time simulation speed of the with acceptable accuracy within hardware capability calculation device Increase model fidelity Require addt l power for numerical calculation 2
3 Key Points explicit ode14x Solver Choice Backward Euler Trapezoidal Rule Small Step Size Large To move from desktop to real-time simulation, there are four areas where adjustments can be made Few # of Iterations Many Low High Model Fidelity Settings must be found that permit fixed-step, fixed-cost simulation with acceptable accuracy and speed Advances in Simscape make it easier to achieve real-time execution with accurate results Fixed-step explicit solver Controller Maximum Possible Step Size Execution Time Simulation Execution Chosen Step Size Other Tasks Step Size Safety Margin Idle Local fixed-step implicit solver #1 Mechanical Electrical Local fixed-step implicit solver #2 3
4 Agenda Overview of Application Example (Hybrid Electric Vehicle) Uses of Real-Time Simulation Challenge of Moving from Desktop to Real-Time Configuring Models for Real-Time Simulation Selecting fixed-step solver Configuring fixed-cost simulations 4





5 Configuring Simscape Models For Real-Time Simulation Model: Vehicle Dynamics Motor Planetary Gear Electric Motor Electric Generator DC-DC Converter Battery Controller Hybrid Electric Vehicle Problem: Configure the model used for desktop simulation so it can be used for HIL testing explicit ode14x Solver Choice Backward Euler Trapezoidal Rule Small Step Size Large Solution: Use Simscape local solvers and other settings to make the model real-time capable Few # of Iterations Many Low High Model Fidelity 5
6 Uses and Benefits of Real-Time Simulation Uses Hardware-in-the-Loop (HIL) testing Benefits Controller Hardware Ability to test conditions that would damage equipment or personnel Ability to test systems where no prototypes exist Reduced costs in the later phases of development Ability to test 24 hours a day, 7 days a week Real-Time Computer (physical system) 6

7 Hardware-in-the-Loop Testing S3 S1 S2 Hardware In the Loop (HIL) 7

8 Challenge of Moving From Desktop to Real-Time Simulation Must find combination of model fidelity and solver settings that permits real-time execution and delivers accurate results Maximum Possible Step Size Larger step sizes result in poor accuracy and robustness Affected by solver choice, # of nonlinear iterations, and model fidelity Chosen Step Size Small explicit ode14x Step Size Backward Euler Solver Choice Large Trapezoidal Rule Minimum Possible Step Size Smaller step sizes result in overrun Execution Time Affected by solver choice, # of iterations and model fidelity Safety Margin Affected by step size Few # of Iterations Many Simulation Execution Processing I/O and Other Tasks Step Size Idle Low High Model Fidelity 8


9 Steps For Moving to Real-Time Simulation Flowchart describes steps engineers take 1. Obtain reference results 2. Check if real-time capable 3. Configure for fixed-step, fixed cost simulation 4. Find settings that deliver acceptable results and speed 5. Test on real time platform 6. Adjust if necessary 6 Adjust model to make it real-time capable 1 Obtain reference results and estimate step size with variable-step solver Y 2 Is the solver taking too many small steps? 3 Simulate with fixed-step, fixed-cost solver ew results match reference results? Y Acceptable simulation speed? Y 5 Simulate on real-time platform Executes in real time with accurate results? Y Increase iterations and/or decrease step size 4 Success Decrease iterations and/or increase step size 9


10 Obtaining Reference Results With Variable-Step Solver ecessary to determine if configuration for real-time simulation delivers acceptable results For Simscape models, ode15s or ode23t are recommended 10

11 Determining If Model Is Real-Time Capable >> semilogy(tout(1:end-1),diff(tout),'-x') Examine step size during simulation to determine: Rough idea of step size for accurate results umber and type of events When step size decreases, an event has occurred Slow recovery indicates dynamics that may require a smaller step size for the fixed-step solver For much of the simulation, the step size is 0.1~0.2s Events Slow Recovery Quick Recovery 11


12 Adjusting Model To Be Real-Time Capable Low High Model Fidelity Examine simulation results to determine when events occur Find elements model that will be difficult for fixed-step solvers Discontinuities Hard-stops, stick-slip friction Small time constants Small masses with undamped, stiff springs Hydraulic circuits with small, compressible volumes Eliminate or soften these effects Events 12
13 Recap 6 Adjust model to make it real-time capable 1 Obtain reference results and estimate step size with variable-step solver Y 2 Is the solver taking too many small steps? 3 Simulate with fixed-step, fixed-cost solver ew results match reference results? Y Acceptable simulation speed? Y Increase iterations and/or decrease step size 4 Decrease iterations and/or increase step size 5 Simulate on real-time platform Executes in real time with accurate results? Y Success 13


14 Explicit vs. Implicit Methods For Choosing a Fixed-Step Solver explicit ode14x Solver Choice Backward Euler Trapezoidal Rule Physical System simulation typically requires a Stiff System Stiff system: A stiff differential equation causes numerical methods to be unstable unless the step size is extremely small. Stiff System is solved better with Implicit Solver. Simscape provides implicit solvers for handling numerically stiff systems Explicit: n 1 yn y hf t, n y n Implicit: y y hf n 1 n n 1, n 1 t y Explicit Implicit Explicit Implicit 14
 explicit ode14x Solver Choice Backward Euler Trapezoidal Rule Choose fixed-step solver based on umerical stiffness of system Computational cost of solver Stiff systems simulate best with an")
15 Choosing a Fixed-Step Solver (Explicit vs. Implicit) explicit ode14x Solver Choice Backward Euler Trapezoidal Rule Choose fixed-step solver based on umerical stiffness of system Computational cost of solver Stiff systems simulate best with an implicit solver Can take larger steps and maintain accuracy Explicit solver requires smaller time step to achieve accuracy comparable to a implicit solver Implicit solvers often require more computational effort per iteration 15

16 Relative Computational Cost of Solvers explicit ode14x Solver Choice Backward Euler Trapezoidal Rule Test all fixed-step solvers on a nonlinear Simscape model Same step size Same total iterations Most explicit solvers require less cost than ode14x, but will require smaller step size for accurate results Local solvers in Simscape provide best combination of computational cost and maximum step size 16

17 Configuring Local Solvers In Simscape Configure per physical network Choose solver and sample time Sample rates can be different Must be integer multiple of global sample time Fixed-step explicit solver Controller Local fixed-step implicit solver #1 Simscape Physical etwork Simscape Physical etwork Local fixed-step implicit solver #2 Backward Euler Designed for robustness Tends to damp oscillations Trapezoidal Rule Designed for accuracy Tends to capture oscillations 17
18 Solution Preventing Overruns by Limiting the umber of Iterations Few # of Iterations Many To prevent overruns, the amount of time spent calculating the solution during each step must be less than the time step Fixed-step solver makes computations per iteration roughly constant Fixed cost sets a maximum number of iterations per time step x x x x x x x x x x x Time required to calculate solution per iteration. Iteration 1 Iteration 2 Iteration 3 Simulation Time True Solution Simulation overrun because too many iterations are required. Real Time 18

19 Configuring Fixed-Cost Simulations Few Many # of Iterations For Simscape models, fixed-cost simulation requires setting onlinear Iterations in Solver Configuration block for all fixed-step solvers Start with 2 or 3 Increase as necessary For ode14x, additional setting in Solver Configuration panel, umber ewton s iterations If Simscape Local Solvers are used, ode14x is only necessary if continuous equations outside of physical network are numerically stiff 19
20 Solver Recommendations For Real-Time Simulation of Simscape Models 1. Always try using local solvers a. Backward Euler for robustness b. Trapezoidal Rule for accuracy 2. Always enable fixed-cost simulation a. onlinear iterations in Solver Configuration block b. Additional setting for ode14x in Solver Configuration panel 3. Start with number of nonlinear iterations at 2 or 3 20


21 Finding Real-Time Settings explicit ode14x Backward Euler Solver Choice Trapezoidal Rule Maximum Possible Step Size Larger step sizes result in poor accuracy and robustness Affected by solver choice and # of nonlinear iterations Chosen Step Size Minimum Possible Step Size Smaller step sizes result in overrun Execution Time Affected by solver choice and # of nonlinear iterations Safety Margin Affected by step size Few Many # of Iterations Small Large Step Size Simulation Execution Processing I/O and Other Tasks Idle Step Size 21
22 Recap 6 Adjust model to make it real-time capable 1 Obtain reference results and estimate step size with variable-step solver Y 2 Is the solver taking too many small steps? 3 Simulate with fixed-step, fixed-cost solver ew results match reference results? Y Acceptable simulation speed? Y Increase iterations and/or decrease step size 4 Decrease iterations and/or increase step size 5 Simulate on real-time platform Executes in real time with accurate results? Y Success 22
23 Applying Process To Other Models in Physical Modeling Tools Models Verify the process with 20 models Hydraulic, electrical, mechanical, pneumatic, thermal elements 18 nonlinear, up to 117 states after equation reduction Intel Core 2 Duo E6700 (2.66GHz) running xpc Target Plenty of time for I/O, other tasks, and safety margin Execution Time Simulation Execution Chosen Step Size Other Tasks Safety Margin Idle % of time step spent in simulation execution Max = 18% Average = 3.9% Min = 6e-4% Step Size 23
24 Key Points explicit ode14x Solver Choice Backward Euler Trapezoidal Rule Small Step Size Large To move from desktop to real-time simulation, there are four areas where adjustments can be made Few # of Iterations Many Low High Model Fidelity Settings must be found that permit fixed-step, fixed-cost simulation with acceptable accuracy and speed Advances in Simscape make it easier to achieve real-time execution with accurate results Fixed-step explicit solver Controller Maximum Possible Step Size Execution Time Simulation Execution Chosen Step Size Other Tasks Step Size Safety Margin Idle Local fixed-step implicit solver #1 Mechanical Electrical Local fixed-step implicit solver #2 24

25 What is xpc Target? Host PC with MATLAB & Simulink Target PC running a Real-Time kernel Ethernet or RS 232 A Host-Target environment that allows for real-time execution of Simulink models on a PC platform. 25








26 What is xpc Target? Desktop PC Compact PCI Rack Mounted PC Single Board Computer PC/104 and PC/104+ Open Architecture: A target PC can be almost any PC compatible system with a 32 bit Intel or AMD processor. 26
27 What is xpc Target? Host PC Target PC Host PC with MATLAB Ethernet or RS 232 xpc Target PC Ethernet or RS 232 An environment that provides interactive access between the real-time application and the host PC. 27





28 What is xpc Target? Host PC Target PC Ethernet or RS 232 An environment that provides interactive access between the real-time application and the host PC. 28
29 What is xpc Target? Host PC Target PC Ethernet or RS 232 An environment with numerous I/O device drivers that are easily configurable within the Simulink model to allow for communication with hardware in real-time. 29







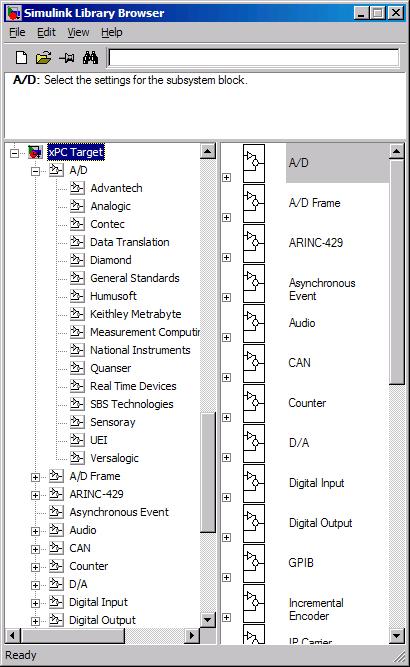
30 What is xpc Target? Target PC An environment with numerous I/O device drivers that are easily configurable within the Simulink model to allow for communication with hardware in real-time. 30

31 Are White Paper and Model available?
Real Time Testing of PMSM Controller using xpc Target Turnkey solution
 Real Time Testing of PMSM Controller using xpc Target Turnkey solution August 08, 2012 Prasanna Deshpande Application Engineering MathWorks India 2012 The MathWorks, Inc. 1 What is real time testing Rapid
Real Time Testing of PMSM Controller using xpc Target Turnkey solution August 08, 2012 Prasanna Deshpande Application Engineering MathWorks India 2012 The MathWorks, Inc. 1 What is real time testing Rapid
Master Class: Diseño de Sistemas Mecatrónicos
 Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt
 Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt Eva Pelster 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate
Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt Eva Pelster 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate
Introduction to Physical Modelling Rory Adams Senior Application Engineer
 Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Physical Modelling with Simscape
 Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
How Simscape Supports Innovation for Cyber-Physical Systems
 How Simscape Supports Innovation for Cyber-Physical Systems Rick Hyde 2015 The MathWorks, Inc. 1 How can we use system-level modelling to support innovative product design? 2 Innovation in electric and
How Simscape Supports Innovation for Cyber-Physical Systems Rick Hyde 2015 The MathWorks, Inc. 1 How can we use system-level modelling to support innovative product design? 2 Innovation in electric and
Advanced AC Motor Control S/W Development Sang-Ho Yoon Senior Application Engineer The MathWorks
 Advanced AC Motor Control S/W Development Sang-Ho Yoon Senior Application Engineer The MathWorks 2012 The MathWorks, Inc. 1 Agenda Develop ECUs with Model-Based Design Generate Application Code for Prototyping
Advanced AC Motor Control S/W Development Sang-Ho Yoon Senior Application Engineer The MathWorks 2012 The MathWorks, Inc. 1 Agenda Develop ECUs with Model-Based Design Generate Application Code for Prototyping
Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape
 Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape A B T P T + - 12V Up V- V+ Down Up Down M Maximilian Apfelbeck MathWorks München, 9.07.2014 2014 The MathWorks, Inc. 1 Key
Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape A B T P T + - 12V Up V- V+ Down Up Down M Maximilian Apfelbeck MathWorks München, 9.07.2014 2014 The MathWorks, Inc. 1 Key
Matlab Simulink Simscape
 Matlab Simulink Simscape 1 / 6 2 / 6 3 / 6 Matlab Simulink Simscape Simscape enables you to rapidly create models of physical systems within the Simulink environment. With Simscape, you build physical
Matlab Simulink Simscape 1 / 6 2 / 6 3 / 6 Matlab Simulink Simscape Simscape enables you to rapidly create models of physical systems within the Simulink environment. With Simscape, you build physical
Modeling Power Electronics Components Using SimElectronics and SimPowerSystems Vivek Raju Application Engineer
 Modeling Power Electronics Components Using SimElectronics and SimPowerSystems Vivek Raju Application Engineer 2014 The MathWorks, Inc. 1 Key Takeaway Modeling Power Electronics Components Using SimElectronics
Modeling Power Electronics Components Using SimElectronics and SimPowerSystems Vivek Raju Application Engineer 2014 The MathWorks, Inc. 1 Key Takeaway Modeling Power Electronics Components Using SimElectronics
Real Time Simulation of Complex Automatic Transmission Models. Marius Băţăuş, Andrei Maciac, Mircea Oprean, Nicolae Vasiliu
 Real Time Simulation of Complex Automatic Transmission Models Marius Băţăuş, Andrei Maciac, Mircea Oprean, Nicolae Vasiliu 1 Introduction To manage the function of a vehicle s engine, transmission, and
Real Time Simulation of Complex Automatic Transmission Models Marius Băţăuş, Andrei Maciac, Mircea Oprean, Nicolae Vasiliu 1 Introduction To manage the function of a vehicle s engine, transmission, and
System modeling using Simulink and Simscape
 System modeling using Simulink and Simscape Abhisek Roy Sruthi Geetha Veer Alakshendra 2015 The MathWorks, Inc. 1 Multi-domain Systems 2 Common challenges 1. Multi-domain simulation 2. Capturing the system
System modeling using Simulink and Simscape Abhisek Roy Sruthi Geetha Veer Alakshendra 2015 The MathWorks, Inc. 1 Multi-domain Systems 2 Common challenges 1. Multi-domain simulation 2. Capturing the system
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 Realtime Simulation of Large- Scale Power System Using Multi- Core Realtime Machine 강효석과장 / Ph.D 2015 The MathWorks, Inc. 2 Renewable/Microgrid Series Topics Distributed and
2015 The MathWorks, Inc. 1 Realtime Simulation of Large- Scale Power System Using Multi- Core Realtime Machine 강효석과장 / Ph.D 2015 The MathWorks, Inc. 2 Renewable/Microgrid Series Topics Distributed and
Introduction to Control Systems Design
 Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape
 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
Introduction to Simulink. Todd Atkins
 Introduction to Simulink Todd Atkins tatkins@mathworks.com 1 Outline What is Simulink? Working with Simulink How Simulink works Componentizing models Continuous and discrete models 4 Simulink Applications
Introduction to Simulink Todd Atkins tatkins@mathworks.com 1 Outline What is Simulink? Working with Simulink How Simulink works Componentizing models Continuous and discrete models 4 Simulink Applications
Integrating Mechanical Design and Multidomain Simulation with Simscape
 Integrating Mechanical Design and Multidomain Simulation with Simscape Steve Miller Simscape Product Manager, MathWorks 2015 The MathWorks, Inc. 1 Integrating Mechanical Design and Multidomain Simulation
Integrating Mechanical Design and Multidomain Simulation with Simscape Steve Miller Simscape Product Manager, MathWorks 2015 The MathWorks, Inc. 1 Integrating Mechanical Design and Multidomain Simulation
Mathieu Dutré - Application Specialist MBSE. Analysis and optimization of physical models for HIL simulation
 Mathieu Dutré - Application Specialist MBSE Analysis and optimization of physical models for HIL simulation Smarter decisions, better products. Industry drivers for HIL simulation Model Driven Virtual
Mathieu Dutré - Application Specialist MBSE Analysis and optimization of physical models for HIL simulation Smarter decisions, better products. Industry drivers for HIL simulation Model Driven Virtual
Targeting Multi-core Systems from Multi-rate Simulink Models for Hardware-in-the-loop Simulations
 A Concurrent Real-Time White Paper 2881 Gateway Drive Pompano Beach, FL 33069 (954) 974-1700 https://www.concurrent.com/real-time/ Targeting Multi-core Systems from Multi-rate Simulink Models for Hardware-in-the-loop
A Concurrent Real-Time White Paper 2881 Gateway Drive Pompano Beach, FL 33069 (954) 974-1700 https://www.concurrent.com/real-time/ Targeting Multi-core Systems from Multi-rate Simulink Models for Hardware-in-the-loop
Modeling and Simulation of Electromechanical Systems
 Modeling and Simulation of Electromechanical Systems Dhirendra Singh dhirendra.singh@mathworks.in Application Engineer Vivek Raju Application Engineer 2015 The MathWorks, Inc. 1 Challenges Working with
Modeling and Simulation of Electromechanical Systems Dhirendra Singh dhirendra.singh@mathworks.in Application Engineer Vivek Raju Application Engineer 2015 The MathWorks, Inc. 1 Challenges Working with
Physical Modeling of Multi-Domain System
 1 Physical Modeling of Multi-Domain System 김종헌차장 Senior Application Engineer MathWorks Korea 2016 The MathWorks, Inc. 2 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing
1 Physical Modeling of Multi-Domain System 김종헌차장 Senior Application Engineer MathWorks Korea 2016 The MathWorks, Inc. 2 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing
Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape The MathWorks, Inc. 1
 Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape 2015 The MathWorks, Inc. 1 In this session Onshape and MATLAB enable engineers to combine CAD models with multidomain, dynamic
Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape 2015 The MathWorks, Inc. 1 In this session Onshape and MATLAB enable engineers to combine CAD models with multidomain, dynamic
Model-based Design/Simulation
 Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
Integrating Mechanical Design and Multidomain Simulation with Simscape
 1 Integrating Mechanical Design and Multidomain Simulation with Simscape 강효석과장 / Ph. D. Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 In this session Onshape and MATLAB enable engineers
1 Integrating Mechanical Design and Multidomain Simulation with Simscape 강효석과장 / Ph. D. Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 In this session Onshape and MATLAB enable engineers
Modelling, Simulation, and Real-Time Testing for Model-Based Design GianCarlo Pacitti Application Engineer MathWorks
 Modelling, Simulation, and Real-Time Testing for Model-Based Design GianCarlo Pacitti Application Engineer MathWorks 1 2013 The MathWorks, Inc. What s great about simulation? 2 What s great about simulation?
Modelling, Simulation, and Real-Time Testing for Model-Based Design GianCarlo Pacitti Application Engineer MathWorks 1 2013 The MathWorks, Inc. What s great about simulation? 2 What s great about simulation?
Experiment 8 SIMULINK
 Experiment 8 SIMULINK Simulink Introduction to simulink SIMULINK is an interactive environment for modeling, analyzing, and simulating a wide variety of dynamic systems. SIMULINK provides a graphical user
Experiment 8 SIMULINK Simulink Introduction to simulink SIMULINK is an interactive environment for modeling, analyzing, and simulating a wide variety of dynamic systems. SIMULINK provides a graphical user
Applications of Program analysis in Model-Based Design
 Applications of Program analysis in Model-Based Design Prahlad Sampath (Prahlad.Sampath@mathworks.com) 2018 by The MathWorks, Inc., MATLAB, Simulink, Stateflow, are registered trademarks of The MathWorks,
Applications of Program analysis in Model-Based Design Prahlad Sampath (Prahlad.Sampath@mathworks.com) 2018 by The MathWorks, Inc., MATLAB, Simulink, Stateflow, are registered trademarks of The MathWorks,
Leveraging Integrated Concurrent Engineering for vehicle dynamics simulation. Manuel CHENE MSC.Software France
 Leveraging Integrated Concurrent Engineering for vehicle dynamics simulation Manuel CHENE MSC.Software France Agenda Challenge of vehicle dynamic simulation: frequency domain coverage necessity for a multi
Leveraging Integrated Concurrent Engineering for vehicle dynamics simulation Manuel CHENE MSC.Software France Agenda Challenge of vehicle dynamic simulation: frequency domain coverage necessity for a multi
Model-based Design/Simulation
 Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
VT System Smart HIL Testing
 VT System Smart HIL Testing V1.0 2010-06-04 Agenda > ECU Testing Testing a Door Control Unit Summary and Outlook Slide: 2 ECU Testing I/O Access for ECU Testing ECU has to be tested in its natural environment
VT System Smart HIL Testing V1.0 2010-06-04 Agenda > ECU Testing Testing a Door Control Unit Summary and Outlook Slide: 2 ECU Testing I/O Access for ECU Testing ECU has to be tested in its natural environment
SIMPACK - A Tool for Off-Line and Real- Time Simulation
 SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
Introduction to Multi-body Dynamics
 division Graduate Course ME 244) Tentative Draft Syllabus 1. Basic concepts in 3-D rigid-body mechanics 1. Rigid body vs flexible body 2. Spatial kinematics (3-D rotation transformations) and Euler theorem
division Graduate Course ME 244) Tentative Draft Syllabus 1. Basic concepts in 3-D rigid-body mechanics 1. Rigid body vs flexible body 2. Spatial kinematics (3-D rotation transformations) and Euler theorem
Mathematical Modelling Using SimScape (Mechanical Systems)
") Experiment Three Mathematical Modelling Using SimScape (Mechanical Systems) Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1. Translational Mechanical System
Experiment Three Mathematical Modelling Using SimScape (Mechanical Systems) Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1. Translational Mechanical System
Real-Time Simulation of Modelica-based Models
 Real-Time Simulation of Modelica-based Models Torsten Blochwitz Thomas Beutlich ITI GmbH Webergasse 1, 01067 Dresden, Germany {blochwitz,beutlich}@iti.de Abstract This paper shows the various steps a simulation
Real-Time Simulation of Modelica-based Models Torsten Blochwitz Thomas Beutlich ITI GmbH Webergasse 1, 01067 Dresden, Germany {blochwitz,beutlich}@iti.de Abstract This paper shows the various steps a simulation
MATLAB Based Optimization Techniques and Parallel Computing
 MATLAB Based Optimization Techniques and Parallel Computing Bratislava June 4, 2009 2009 The MathWorks, Inc. Jörg-M. Sautter Application Engineer The MathWorks Agenda Introduction Local and Smooth Optimization
MATLAB Based Optimization Techniques and Parallel Computing Bratislava June 4, 2009 2009 The MathWorks, Inc. Jörg-M. Sautter Application Engineer The MathWorks Agenda Introduction Local and Smooth Optimization
Plant modeling: A First Step to Early Verification of Control Systems
 Plant modeling: A First Step to Early Verification of Control Systems Arkadiy Turevskiy, Technical Marketing Manager, The MathWorks Use simulation for early verification of your design before hardware
Plant modeling: A First Step to Early Verification of Control Systems Arkadiy Turevskiy, Technical Marketing Manager, The MathWorks Use simulation for early verification of your design before hardware
Mass-Spring Systems. Last Time?
 Mass-Spring Systems Last Time? Implicit Surfaces & Marching Cubes/Tetras Collision Detection & Conservative Bounding Regions Spatial Acceleration Data Structures Octree, k-d tree, BSF tree 1 Today Particle
Mass-Spring Systems Last Time? Implicit Surfaces & Marching Cubes/Tetras Collision Detection & Conservative Bounding Regions Spatial Acceleration Data Structures Octree, k-d tree, BSF tree 1 Today Particle
Mit MATLAB auf der Überholspur Methoden zur Beschleunigung von MATLAB Anwendungen
 Mit MATLAB auf der Überholspur Methoden zur Beschleunigung von MATLAB Anwendungen Frank Graeber Application Engineering MathWorks Germany 2013 The MathWorks, Inc. 1 Speed up the serial code within core
Mit MATLAB auf der Überholspur Methoden zur Beschleunigung von MATLAB Anwendungen Frank Graeber Application Engineering MathWorks Germany 2013 The MathWorks, Inc. 1 Speed up the serial code within core
USING THE MATLAB TOOLSET TO IMPROVE EFFICIENCY IN THE EOBD CALIBRATION PROCESS
 1 USING THE MATLAB TOOLSET TO IMPROVE EFFICIENCY IN THE EOBD CALIBRATION PROCESS and Ford Motor Company Limited, UK Agenda 2 Introductions and Agenda Background Historical Calibration Process New Calibration
1 USING THE MATLAB TOOLSET TO IMPROVE EFFICIENCY IN THE EOBD CALIBRATION PROCESS and Ford Motor Company Limited, UK Agenda 2 Introductions and Agenda Background Historical Calibration Process New Calibration
Paul Goossens Product Director
 Paul Goossens Product Director June 2009 Maplesoft, a division of Waterloo Maple Inc., 2009 Maplesoft and Maple are trademarks of Waterloo Maple Inc. 2009 Maplesoft, a a division of of Waterloo Maple Inc.
Paul Goossens Product Director June 2009 Maplesoft, a division of Waterloo Maple Inc., 2009 Maplesoft and Maple are trademarks of Waterloo Maple Inc. 2009 Maplesoft, a a division of of Waterloo Maple Inc.
Real-Time Testing in a Modern, Agile Development Workflow
 Real-Time Testing in a Modern, Agile Development Workflow Simon Eriksson Application Engineer 2015 The MathWorks, Inc. 1 Demo Going from Desktop Testing to Real-Time Testing 2 Key Take-Aways From This
Real-Time Testing in a Modern, Agile Development Workflow Simon Eriksson Application Engineer 2015 The MathWorks, Inc. 1 Demo Going from Desktop Testing to Real-Time Testing 2 Key Take-Aways From This
Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel
 Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel Vasco Lenzi Application Engineer MathWorks 2017 The MathWorks, Inc. 1 Introduction From Ticino, studied Mech Engineer at ETHZ Formula
Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel Vasco Lenzi Application Engineer MathWorks 2017 The MathWorks, Inc. 1 Introduction From Ticino, studied Mech Engineer at ETHZ Formula
efpgasim Features & Applications
 efpgasim Features & Applications Christian Dufour, Ph.D. Senior Simulation specialist, Power System and Motor Drive Applications OPAL-RT TECHNOLOGIES, Montréal, Canada Presentation objective Introduction
efpgasim Features & Applications Christian Dufour, Ph.D. Senior Simulation specialist, Power System and Motor Drive Applications OPAL-RT TECHNOLOGIES, Montréal, Canada Presentation objective Introduction
Simulation in Computer Graphics. Particles. Matthias Teschner. Computer Science Department University of Freiburg
 Simulation in Computer Graphics Particles Matthias Teschner Computer Science Department University of Freiburg Outline introduction particle motion finite differences system of first order ODEs second
Simulation in Computer Graphics Particles Matthias Teschner Computer Science Department University of Freiburg Outline introduction particle motion finite differences system of first order ODEs second
Parallel implicit ordinary differential equation solver for cuda. Tomasz M. Kardaś
 Parallel implicit ordinary differential equation solver for cuda Tomasz M. Kardaś August 11, 2014 Chapter 1 Parallel Implicit Ordinary Differential Equations Solver A simplest definition of stiffness,
Parallel implicit ordinary differential equation solver for cuda Tomasz M. Kardaś August 11, 2014 Chapter 1 Parallel Implicit Ordinary Differential Equations Solver A simplest definition of stiffness,
Lab 2 Modeling from an observed response
 Lab 2 Modeling from an observed response Agenda Time Item 5 min Lab introduction The big picture of system modeling in the time domain 5 min The SEE, to quantify the goodness of fit 5 min Demonstration
Lab 2 Modeling from an observed response Agenda Time Item 5 min Lab introduction The big picture of system modeling in the time domain 5 min The SEE, to quantify the goodness of fit 5 min Demonstration
IMPLEMENTATION OF BALL-AND-BEAM CONTROL SYSTEM AS AN INSTANCE OF SIMULINK TO 32-BIT MICROCONTROLLER INTERFACE
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 76 Electrical Engineering 2013 Krzysztof NOWOPOLSKI* IMPLEMENTATION OF BALL-AND-BEAM CONTROL SYSTEM AS AN INSTANCE OF SIMULINK TO 32-BIT MICROCONTROLLER
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 76 Electrical Engineering 2013 Krzysztof NOWOPOLSKI* IMPLEMENTATION OF BALL-AND-BEAM CONTROL SYSTEM AS AN INSTANCE OF SIMULINK TO 32-BIT MICROCONTROLLER
Modeling HDL components for FPGAs in control applications
 Modeling HDL components for FPGAs in control applications Mark Corless, Principal Application Engineer, Novi MI 2014 The MathWorks, Inc. 1 Position sensing High resolution voltage modulation Critical diagnostics
Modeling HDL components for FPGAs in control applications Mark Corless, Principal Application Engineer, Novi MI 2014 The MathWorks, Inc. 1 Position sensing High resolution voltage modulation Critical diagnostics
Experiment 6 SIMULINK
 Experiment 6 SIMULINK Simulink Introduction to simulink SIMULINK is an interactive environment for modeling, analyzing, and simulating a wide variety of dynamic systems. SIMULINK provides a graphical user
Experiment 6 SIMULINK Simulink Introduction to simulink SIMULINK is an interactive environment for modeling, analyzing, and simulating a wide variety of dynamic systems. SIMULINK provides a graphical user
Multicore Computer, GPU 및 Cluster 환경에서의 MATLAB Parallel Computing 기능
 Multicore Computer, GPU 및 Cluster 환경에서의 MATLAB Parallel Computing 기능 성호현 MathWorks Korea 2012 The MathWorks, Inc. 1 A Question to Consider Do you want to speed up your algorithms? If so Do you have a multi-core
Multicore Computer, GPU 및 Cluster 환경에서의 MATLAB Parallel Computing 기능 성호현 MathWorks Korea 2012 The MathWorks, Inc. 1 A Question to Consider Do you want to speed up your algorithms? If so Do you have a multi-core
Verification, Validation, and Test with Model-Based Design
 2008-01-2709 Verification, Validation, and Test with Model-Based Design Copyright 2008 The MathWorks, Inc Tom Erkkinen The MathWorks, Inc. Mirko Conrad The MathWorks, Inc. ABSTRACT Model-Based Design with
2008-01-2709 Verification, Validation, and Test with Model-Based Design Copyright 2008 The MathWorks, Inc Tom Erkkinen The MathWorks, Inc. Mirko Conrad The MathWorks, Inc. ABSTRACT Model-Based Design with
Simscape User s Guide. R2014a
 Simscape User s Guide R2014a How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com doc@mathworks.com
Simscape User s Guide R2014a How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com doc@mathworks.com
How Real-Time Testing Improves the Design of a PMSM Controller
 How Real-Time Testing Improves the Design of a PMSM Controller Prasanna Deshpande Control Design & Automation Application Engineer MathWorks 2015 The MathWorks, Inc. 1 Problem Statement: Design speed control
How Real-Time Testing Improves the Design of a PMSM Controller Prasanna Deshpande Control Design & Automation Application Engineer MathWorks 2015 The MathWorks, Inc. 1 Problem Statement: Design speed control
Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems
 Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems Gernot Schraberger Industry Manager, Europe Industrial Automation & Machinery, Energy Production MathWorks 2012 The
Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems Gernot Schraberger Industry Manager, Europe Industrial Automation & Machinery, Energy Production MathWorks 2012 The
Accelerating Simulink Optimization, Code Generation & Test Automation Through Parallelization
 Accelerating Simulink Optimization, Code Generation & Test Automation Through Parallelization Ryan Chladny Application Engineering May 13 th, 2014 2014 The MathWorks, Inc. 1 Design Challenge: Electric
Accelerating Simulink Optimization, Code Generation & Test Automation Through Parallelization Ryan Chladny Application Engineering May 13 th, 2014 2014 The MathWorks, Inc. 1 Design Challenge: Electric
Control System Design and Rapid Prototyping Using Simulink Chirag Patel Sr. Application Engineer Modeling and Simulink MathWorks India
 Control System Design and Rapid Prototyping Using Simulink Chirag Patel Sr. Application Engineer Modeling and Simulink MathWorks India 2014 The MathWorks, Inc. 1 Are you using different tools for design
Control System Design and Rapid Prototyping Using Simulink Chirag Patel Sr. Application Engineer Modeling and Simulink MathWorks India 2014 The MathWorks, Inc. 1 Are you using different tools for design
Motor Control: Model-Based Design from Concept to Implementation on heterogeneous SoC FPGAs Alexander Schreiber, MathWorks
 Motor Control: Model-Based Design from Concept to Implementation on heterogeneous SoC FPGAs Alexander Schreiber, MathWorks 2014 The MathWorks, Inc. 1 Some components of a production application Production
Motor Control: Model-Based Design from Concept to Implementation on heterogeneous SoC FPGAs Alexander Schreiber, MathWorks 2014 The MathWorks, Inc. 1 Some components of a production application Production
Υπολογιστικά πειράματα με το MATLAB Σύνδεση με Arduino & Raspberry Pi Ζαχαρίας Γκέτσης Μηχανικός Εφαρμογών
 Υπολογιστικά πειράματα με το MATLAB Σύνδεση με Arduino & Raspberry Pi Ζαχαρίας Γκέτσης Μηχανικός Εφαρμογών 2012 The MathWorks, Inc. 1 Project-Based Learning Project-based learning is a comprehensive approach
Υπολογιστικά πειράματα με το MATLAB Σύνδεση με Arduino & Raspberry Pi Ζαχαρίας Γκέτσης Μηχανικός Εφαρμογών 2012 The MathWorks, Inc. 1 Project-Based Learning Project-based learning is a comprehensive approach
Design and Verification of Motion Control Algorithms Using Simulation
 Design and Verification of Motion Control Algorithms Using Simulation Douglas Eastman, Paul Lambrechts, Arkadiy Turevskiy The MathWorks, Inc. Natick, MA, 176 Identifying system level problems early and
Design and Verification of Motion Control Algorithms Using Simulation Douglas Eastman, Paul Lambrechts, Arkadiy Turevskiy The MathWorks, Inc. Natick, MA, 176 Identifying system level problems early and
Simulation of metal forming processes :
 Simulation of metal forming processes : umerical aspects of contact and friction People Contact algorithms LTAS-MCT in a few words Laboratoire des Techniques Aéronautiques et Spatiales (Aerospace Laboratory)
Simulation of metal forming processes : umerical aspects of contact and friction People Contact algorithms LTAS-MCT in a few words Laboratoire des Techniques Aéronautiques et Spatiales (Aerospace Laboratory)
Verification, Validation and Test in Model Based Design Manohar Reddy
 Verification, Validation and Test in Model Based Design Manohar Reddy 2015 The MathWorks, Inc. 1 Continuous Test & Verification Productivity + Model & Code Quality System & Component Dynamic testing &
Verification, Validation and Test in Model Based Design Manohar Reddy 2015 The MathWorks, Inc. 1 Continuous Test & Verification Productivity + Model & Code Quality System & Component Dynamic testing &
Ordinary Differential Equations
 Next: Partial Differential Equations Up: Numerical Analysis for Chemical Previous: Numerical Differentiation and Integration Subsections Runge-Kutta Methods Euler's Method Improvement of Euler's Method
Next: Partial Differential Equations Up: Numerical Analysis for Chemical Previous: Numerical Differentiation and Integration Subsections Runge-Kutta Methods Euler's Method Improvement of Euler's Method
Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic
 Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic Günther Zauner 1,2, Daniel Leitner 3, Felix Breitenecker 1 1 Vienna University of Technology, Wiedner Hauptstr.
Modeling Structural - Dynamics Systems in MODELICA/Dymola, MODELICA/Mosilab and AnyLogic Günther Zauner 1,2, Daniel Leitner 3, Felix Breitenecker 1 1 Vienna University of Technology, Wiedner Hauptstr.
ME964 High Performance Computing for Engineering Applications
 ME964 High Performance Computing for Engineering Applications Outlining Midterm Projects Topic 3: GPU-based FEA Topic 4: GPU Direct Solver for Sparse Linear Algebra March 01, 2011 Dan Negrut, 2011 ME964
ME964 High Performance Computing for Engineering Applications Outlining Midterm Projects Topic 3: GPU-based FEA Topic 4: GPU Direct Solver for Sparse Linear Algebra March 01, 2011 Dan Negrut, 2011 ME964
Study and implementation of computational methods for Differential Equations in heterogeneous systems. Asimina Vouronikoy - Eleni Zisiou
 Study and implementation of computational methods for Differential Equations in heterogeneous systems Asimina Vouronikoy - Eleni Zisiou Outline Introduction Review of related work Cyclic Reduction Algorithm
Study and implementation of computational methods for Differential Equations in heterogeneous systems Asimina Vouronikoy - Eleni Zisiou Outline Introduction Review of related work Cyclic Reduction Algorithm
Automatic Code Generation Technology Adoption Lessons Learned from Commercial Vehicle Case Studies
 08AE-22 Automatic Code Generation Technology Adoption Lessons Learned from Commercial Vehicle Case Studies Copyright 2007 The MathWorks, Inc Tom Erkkinen The MathWorks, Inc. Scott Breiner John Deere ABSTRACT
08AE-22 Automatic Code Generation Technology Adoption Lessons Learned from Commercial Vehicle Case Studies Copyright 2007 The MathWorks, Inc Tom Erkkinen The MathWorks, Inc. Scott Breiner John Deere ABSTRACT
Industrial PC for real-time rapid prototyping KEY FEATURES
 xpc TargetBox Industrial PC for real-time rapid prototyping xpc TargetBox is an industrial PC system that features a combination of performance, ruggedness, and I/O expandability in a compact package specifically
xpc TargetBox Industrial PC for real-time rapid prototyping xpc TargetBox is an industrial PC system that features a combination of performance, ruggedness, and I/O expandability in a compact package specifically
Design optimisation of industrial robots using the Modelica multi-physics modeling language
 Design optimisation of industrial robots using the Modelica multi-physics modeling language A. Kazi, G. Merk, M. Otter, H. Fan, (ArifKazi, GuentherMerk)@kuka-roboter.de (Martin.Otter, Hui.Fan)@dlr.de KUKA
Design optimisation of industrial robots using the Modelica multi-physics modeling language A. Kazi, G. Merk, M. Otter, H. Fan, (ArifKazi, GuentherMerk)@kuka-roboter.de (Martin.Otter, Hui.Fan)@dlr.de KUKA
HPC and IT Issues Session Agenda. Deployment of Simulation (Trends and Issues Impacting IT) Mapping HPC to Performance (Scaling, Technology Advances)
 Mapping HPC to Performance (Scaling, Technology Advances)") HPC and IT Issues Session Agenda Deployment of Simulation (Trends and Issues Impacting IT) Discussion Mapping HPC to Performance (Scaling, Technology Advances) Discussion Optimizing IT for Remote Access
HPC and IT Issues Session Agenda Deployment of Simulation (Trends and Issues Impacting IT) Discussion Mapping HPC to Performance (Scaling, Technology Advances) Discussion Optimizing IT for Remote Access
Simulink Based Robot Arm Control Workstation. Figure 1-1 High Level Block Diagram
 Introduction: This project consists of designing a software-based control workstation in the Simulink environment using the SimMechanics Toolbox. The Quanser robot arm system will be modeled using this
Introduction: This project consists of designing a software-based control workstation in the Simulink environment using the SimMechanics Toolbox. The Quanser robot arm system will be modeled using this
Introduction to Simulink
 University College of Southeast Norway Introduction to Simulink Hans-Petter Halvorsen, 2016.11.01 http://home.hit.no/~hansha Preface Simulink, developed by The MathWorks, is a commercial tool for modeling,
University College of Southeast Norway Introduction to Simulink Hans-Petter Halvorsen, 2016.11.01 http://home.hit.no/~hansha Preface Simulink, developed by The MathWorks, is a commercial tool for modeling,
High-Value PXI Embedded Controller for Windows. High-Value Embedded Controllers for PXI Express NI PXI-8101, NI PXI NI PXIe-8101, NI PXIe-8102
 High-Value PXI Embedded Controller for Windows NI PXI-8101, NI PXI-8102 2.0 GHz single-core for PXI-8101, 1.9 GHz dual-core for PXI-8102 1 GB (1 x 1 GB DIMM) 800 MHz DDR2 RAM standard, 4 GB (1 x 4 GB DIMMs)
High-Value PXI Embedded Controller for Windows NI PXI-8101, NI PXI-8102 2.0 GHz single-core for PXI-8101, 1.9 GHz dual-core for PXI-8102 1 GB (1 x 1 GB DIMM) 800 MHz DDR2 RAM standard, 4 GB (1 x 4 GB DIMMs)
ANSYS HPC Technology Leadership
 ANSYS HPC Technology Leadership 1 ANSYS, Inc. November 14, Why ANSYS Users Need HPC Insight you can t get any other way It s all about getting better insight into product behavior quicker! HPC enables
ANSYS HPC Technology Leadership 1 ANSYS, Inc. November 14, Why ANSYS Users Need HPC Insight you can t get any other way It s all about getting better insight into product behavior quicker! HPC enables
Mathematical Methods and Modeling Laboratory class. Numerical Integration of Ordinary Differential Equations
 Mathematical Methods and Modeling Laboratory class Numerical Integration of Ordinary Differential Equations Exact Solutions of ODEs Cauchy s Initial Value Problem in normal form: Recall: if f is locally
Mathematical Methods and Modeling Laboratory class Numerical Integration of Ordinary Differential Equations Exact Solutions of ODEs Cauchy s Initial Value Problem in normal form: Recall: if f is locally
Matthew Morris Lalit Tanwar
 Adviser: Dr. Becker-Gomez Tim Southerton Brian Grosso Matthew Morris Lalit Tanwar Kevin Meehan Alex Reid 10/01/13 RC Camera Car SDR 1 Background Information Problem Definition Stakeholders RIT Customer
Adviser: Dr. Becker-Gomez Tim Southerton Brian Grosso Matthew Morris Lalit Tanwar Kevin Meehan Alex Reid 10/01/13 RC Camera Car SDR 1 Background Information Problem Definition Stakeholders RIT Customer
Further Developments and Applications of SIMPACK Code Export
 Further Developments and Applications of SIMPACK Code Export Frank Kohlschmied, Intec GmbH Introduction New Developments in SIMPACK Code Export C-Code Export Code Export-Executable usable as partner in
Further Developments and Applications of SIMPACK Code Export Frank Kohlschmied, Intec GmbH Introduction New Developments in SIMPACK Code Export C-Code Export Code Export-Executable usable as partner in
Vehicle Load Area Division Wall Integrity during Frontal Crash
 Vehicle Load Area Division Wall Integrity during Frontal Crash H. Türkmen TOFAS Türk Otomobil Fabrikasi A.S. Abstract : This study addresses design efforts of a vehicle load area division wall and the
Vehicle Load Area Division Wall Integrity during Frontal Crash H. Türkmen TOFAS Türk Otomobil Fabrikasi A.S. Abstract : This study addresses design efforts of a vehicle load area division wall and the
ODE IVP. An Ordinary Differential Equation (ODE) is an equation that contains a function having one independent variable:
 is an equation that contains a function having one independent variable:") Euler s Methods ODE IVP An Ordinary Differential Equation (ODE) is an equation that contains a function having one independent variable: The equation is coupled with an initial value/condition (i.e., value
Euler s Methods ODE IVP An Ordinary Differential Equation (ODE) is an equation that contains a function having one independent variable: The equation is coupled with an initial value/condition (i.e., value
Euler s Methods (a family of Runge- Ku9a methods)
") Euler s Methods (a family of Runge- Ku9a methods) ODE IVP An Ordinary Differential Equation (ODE) is an equation that contains a function having one independent variable: The equation is coupled with an
Euler s Methods (a family of Runge- Ku9a methods) ODE IVP An Ordinary Differential Equation (ODE) is an equation that contains a function having one independent variable: The equation is coupled with an
Numerical Simulation of Dynamic Systems XXIV
 Numerical Simulation of Dynamic Systems XXIV Prof. Dr. François E. Cellier Department of Computer Science ETH Zurich May 14, 2013 Introduction Introduction A number of important simulation applications
Numerical Simulation of Dynamic Systems XXIV Prof. Dr. François E. Cellier Department of Computer Science ETH Zurich May 14, 2013 Introduction Introduction A number of important simulation applications
The MathWorks Products and Prices Euro Academic March 2010
 MATLAB Product Family Academic pricing is reserved for noncommercial use by degree-granting institutions in support of on-campus classroom instruction and academic research. Refer to /academia for complete
MATLAB Product Family Academic pricing is reserved for noncommercial use by degree-granting institutions in support of on-campus classroom instruction and academic research. Refer to /academia for complete
Anticipatory Shifting Optimization of a Transmission Control Unit for an Automatic Transmission through Advanced Driver Assistance Systems
 Anticipatory Shifting Optimization of a Transmission Control Unit for an Automatic Transmission through Advanced Driver Assistance Systems Salim Chaker 1 Michael Folie 2 Christian Kehrer 1 Frank Huber
Anticipatory Shifting Optimization of a Transmission Control Unit for an Automatic Transmission through Advanced Driver Assistance Systems Salim Chaker 1 Michael Folie 2 Christian Kehrer 1 Frank Huber
Solving Optimization Problems with MATLAB Loren Shure
 Solving Optimization Problems with MATLAB Loren Shure 6 The MathWorks, Inc. Topics Introduction Least-squares minimization Nonlinear optimization Mied-integer programming Global optimization Optimization
Solving Optimization Problems with MATLAB Loren Shure 6 The MathWorks, Inc. Topics Introduction Least-squares minimization Nonlinear optimization Mied-integer programming Global optimization Optimization
Hardware and Software Co-Design for Motor Control Applications
 Hardware and Software Co-Design for Motor Control Applications Jonas Rutström Application Engineering 2015 The MathWorks, Inc. 1 Masterclass vs. Presentation? 2 What s a SoC? 3 What s a SoC? When we refer
Hardware and Software Co-Design for Motor Control Applications Jonas Rutström Application Engineering 2015 The MathWorks, Inc. 1 Masterclass vs. Presentation? 2 What s a SoC? 3 What s a SoC? When we refer
SIMPACK Code Export. Customer Application Examples. The Basis for Mechatronic Simulation
 Customer Application Examples 1 SIMPACK Code Export The Basis for Mechatronic Simulation Contents Customer Application Examples 2 Functionality Fields of Application What s new since last User Meeting
Customer Application Examples 1 SIMPACK Code Export The Basis for Mechatronic Simulation Contents Customer Application Examples 2 Functionality Fields of Application What s new since last User Meeting
MMTO Internal Technical Memorandum #04-3
 MMTO Internal Technical Memorandum #04-3 Control System Prototyping A Case Study D. Clark July 15, 2004 Introduction In the spring of 2004, MMTO began a project to upgrade the MMT servo control system
MMTO Internal Technical Memorandum #04-3 Control System Prototyping A Case Study D. Clark July 15, 2004 Introduction In the spring of 2004, MMTO began a project to upgrade the MMT servo control system
BMS Testing With CANoe
 BMS Testing With CANoe Overview V0.1 2018-07-10 1. Introduction 2. BMS Test System Components 3. CANoe Integration BMS Testing With CANoe Agenda V0.1 2018-07-10 Introduction Main Functions of a Battery
BMS Testing With CANoe Overview V0.1 2018-07-10 1. Introduction 2. BMS Test System Components 3. CANoe Integration BMS Testing With CANoe Agenda V0.1 2018-07-10 Introduction Main Functions of a Battery
Tutorial: Getting Started with the LabVIEW Simulation Module
 Tutorial: Getting Started with the LabVIEW Simulation Module - LabVIEW 8.5 Simulati... Page 1 of 10 Cart Help Search You are here: NI Home > Support > Product Reference > Manuals > LabVIEW 8.5 Simulation
Tutorial: Getting Started with the LabVIEW Simulation Module - LabVIEW 8.5 Simulati... Page 1 of 10 Cart Help Search You are here: NI Home > Support > Product Reference > Manuals > LabVIEW 8.5 Simulation
Designing for Reliability and Robustness
 MATLAB Digest Designing for Reliability and Robustness By Stuart Kozola No design is free from uncertainty or natural variation. For example, how will the design be used? How will it respond to environmental
MATLAB Digest Designing for Reliability and Robustness By Stuart Kozola No design is free from uncertainty or natural variation. For example, how will the design be used? How will it respond to environmental
Implementation Frameworks: OpenFresco & OpenFrescoExpress
 MTS/PEER Expert Seminar: Hybrid Simulation Technologies & Methods for Civil Engineering, UC Berkeley, 3/20-3/21/2018 Implementation Frameworks: OpenFresco & OpenFrescoExpress Andreas Schellenberg, Ph.D.,
MTS/PEER Expert Seminar: Hybrid Simulation Technologies & Methods for Civil Engineering, UC Berkeley, 3/20-3/21/2018 Implementation Frameworks: OpenFresco & OpenFrescoExpress Andreas Schellenberg, Ph.D.,
Integration of CAE Tools for Complete System Prototyping EASY5 User Conference May, 2000 Presented by: Joel Tollefson
 Integration of CAE Tools for Complete System Prototyping 2000 User Conference May, 2000 Presented by: Joel Tollefson Presentation Focus Provide a framework to support other presentations define concepts
Integration of CAE Tools for Complete System Prototyping 2000 User Conference May, 2000 Presented by: Joel Tollefson Presentation Focus Provide a framework to support other presentations define concepts
Simulation in Computer Graphics. Deformable Objects. Matthias Teschner. Computer Science Department University of Freiburg
 Simulation in Computer Graphics Deformable Objects Matthias Teschner Computer Science Department University of Freiburg Outline introduction forces performance collision handling visualization University
Simulation in Computer Graphics Deformable Objects Matthias Teschner Computer Science Department University of Freiburg Outline introduction forces performance collision handling visualization University
Capabilities and Advancements of Hybrid Simulation using LHPOST. Gilberto Mosqueda Professor UC San Diego December 11, 2017
 Capabilities and Advancements of Hybrid Simulation using LHPOST Gilberto Mosqueda Professor UC San Diego December 11, 2017 NHERI @ UCSD Users Training Workshop, December 11, 2017 Overview Background on
Capabilities and Advancements of Hybrid Simulation using LHPOST Gilberto Mosqueda Professor UC San Diego December 11, 2017 NHERI @ UCSD Users Training Workshop, December 11, 2017 Overview Background on
Conference Dynamic Simulation in Vehicle Engineering Realtime Simulation of Vehicles Containing Detailed Components
 General Conference Dynamic Simulation in Vehicle Engineering Realtime Simulation of Vehicles Containing Detailed Components SIMPACK AG 2014, All rights reserved. SIMPACK Introduction Agenda SIMPACK AG
General Conference Dynamic Simulation in Vehicle Engineering Realtime Simulation of Vehicles Containing Detailed Components SIMPACK AG 2014, All rights reserved. SIMPACK Introduction Agenda SIMPACK AG
Robert G. Landers. Manufacturing Automation and Control Laboratory (130 Toomey)
") Robert G. Landers Broad Areas of Research Interests: Controls applications and manufacturing automation Specific Research Interests: Modeling, analysis, monitoring, and control of manufacturing processes
Robert G. Landers Broad Areas of Research Interests: Controls applications and manufacturing automation Specific Research Interests: Modeling, analysis, monitoring, and control of manufacturing processes
Parallel and Distributed Computing with MATLAB Gerardo Hernández Manager, Application Engineer
 Parallel and Distributed Computing with MATLAB Gerardo Hernández Manager, Application Engineer 2018 The MathWorks, Inc. 1 Practical Application of Parallel Computing Why parallel computing? Need faster
Parallel and Distributed Computing with MATLAB Gerardo Hernández Manager, Application Engineer 2018 The MathWorks, Inc. 1 Practical Application of Parallel Computing Why parallel computing? Need faster
Hardware in the Loop Simulation of Production Systems Dynamics
 Hardware in the Loop Simulation of Production Systems Dynamics Sascha Röck 1 1 Institute for Control Engineering of Machine Tools and Manufacturing Units (ISW), University of Stuttgart Abstract Constantly
Hardware in the Loop Simulation of Production Systems Dynamics Sascha Röck 1 1 Institute for Control Engineering of Machine Tools and Manufacturing Units (ISW), University of Stuttgart Abstract Constantly
ANSYS HPC. Technology Leadership. Barbara Hutchings ANSYS, Inc. September 20, 2011
 ANSYS HPC Technology Leadership Barbara Hutchings barbara.hutchings@ansys.com 1 ANSYS, Inc. September 20, Why ANSYS Users Need HPC Insight you can t get any other way HPC enables high-fidelity Include
ANSYS HPC Technology Leadership Barbara Hutchings barbara.hutchings@ansys.com 1 ANSYS, Inc. September 20, Why ANSYS Users Need HPC Insight you can t get any other way HPC enables high-fidelity Include
Introduction to Simulink Design Optimization
 2009 The MathWorks, Inc. Introduction to Simulink Design Optimization Estimate and optimize Simulink model parameters Arkadiy Turevskiy and Alec Stothert Introduction to Simulink Design Optimization Estimate
2009 The MathWorks, Inc. Introduction to Simulink Design Optimization Estimate and optimize Simulink model parameters Arkadiy Turevskiy and Alec Stothert Introduction to Simulink Design Optimization Estimate
AMSC/CMSC 460 Final Exam, Fall 2007
 AMSC/CMSC 460 Final Exam, Fall 2007 Show all work. You may leave arithmetic expressions in any form that a calculator could evaluate. By putting your name on this paper, you agree to abide by the university
AMSC/CMSC 460 Final Exam, Fall 2007 Show all work. You may leave arithmetic expressions in any form that a calculator could evaluate. By putting your name on this paper, you agree to abide by the university