Panoramas. Why Mosaic? Why Mosaic? Mosaics: stitching images together. Why Mosaic? Olivier Gondry. Bill Freeman Frédo Durand MIT - EECS
|
|
|
- Elinor Wells
- 6 years ago
- Views:
Transcription










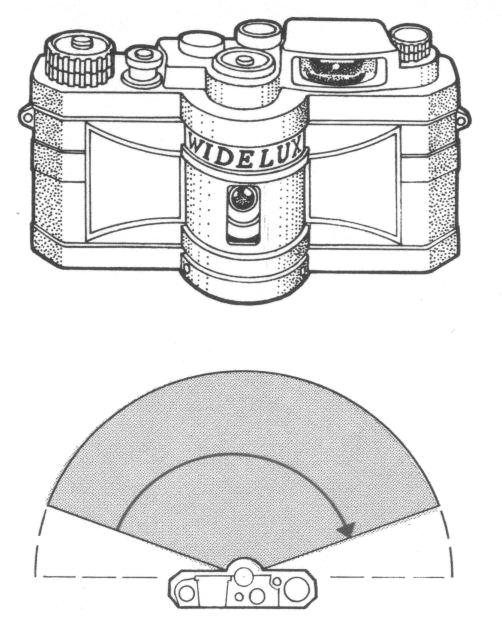
1 Olivier Gondry Digital and Computational Photography Advanced Computational Photography Panoramas Director of music video and commercial Special effect specialist (Morphing, rotoscoping) Today at 5:40pm in 32-4 Bill Freeman Frédo Durand MIT - EECS Lots of slides stolen from Alyosha Efros, who stole them from Steve Seitz and Rick Szeliski Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 50 x 35 Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 50 x 35 Human FOV = 200 x 35 Slide from Brown & Lowe Slide from Brown & Lowe Why Mosaic? Mosaics: stitching images together Are you getting the whole picture? Compact Camera FOV = 50 x 35 Human FOV = 200 x 35 Panoramic Mosaic = 360 x 80 Slide from Brown & Lowe virtual wide-angle camera




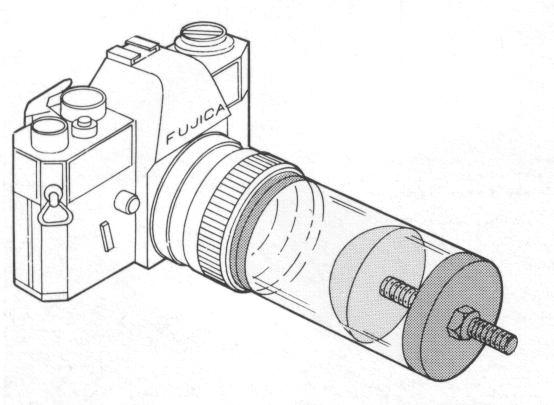
2 How to do it? Basic Procedure Take a sequence of images from the same position Rotate the camera about its optical center Compute transformation between second image and first Transform the second image to overlap with the first Blend the two together to create a mosaic If there are more images, repeat but wait, why should this work at all? What about the 3D geometry of the scene? Why aren t we using it? A pencil of rays contains all views real camera synthetic camera Can generate any synthetic camera view as long as it has the same center of projection! Aligning images: translation Image reprojection left on top right on top Translations are not enough to align the images mosaic PP The mosaic has a natural interpretation in 3D The images are reprojected onto a common plane The mosaic is formed on this plane Mosaic is a synthetic wide-angle camera Image reprojection Basic question How to relate 2 images from same camera center? how to map a pixel from PP to PP2 Answer Cast a ray through each pixel in PP Draw the pixel where that ray intersects PP2 PP But don t we need to know the geometry of the two planes in respect to the eye? Observation: Rather than thinking of this as a 3D reprojection, think of it as a 2D image warp from one image to another PP2 Back to Image Warping Which t-form is the right one for warping PP into PP2? e.g. translation, Euclidean, affine, projective Translation 2 unknowns Affine 6 unknowns Perspective 8 unknowns 2
3 Homography Projective mapping between any two PPs with the same center of projection rectangle should map to arbitrary quadrilateral parallel lines aren t but must preserve straight lines same as: project, rotate, reproject called Homography p To apply a homography H wx' * * wy' = * * w * * H * x * y * p Compute p = Hp (regular matrix multiply) Convert p from homogeneous to image coordinates PP PP2 D homogeneous coordinates Add one dimension to make life simpler (x, w) represent point x/w w x w= D homography Reproject to different line D homography Reproject to different line w w w= w= x x D homography Reproject to different line Equivalent to rotating 2D points reprojection is linear in homogeneous coordinates w w= Same in 2D Reprojection = homography 3x3 matrix wx' * * wy' = * * w * * p H * x * y * p PP PP2 x 3







4 Image warping with homographies image plane in front Digression: perspective correction image plane below black area where no pixel maps to From Photography, London et al. From Photography, London et al. From Photography, London et al. Tilt-shift lens 35mm SLR version From Photography, London et al. 4

 We want a nice compact formula (line) to predict s from s: a + b = We want to find a and b How many (, ) pairs do we need? ' ' a + b = a ' = Ax=B ' 2a + b = 2 2 b 2 What if the data is noisy?")
5 Photoshop version (perspective crop) + you control reflection and perspective independently Back to Image rectification p p To unwarp (rectify) an image Find the homography H given a set of p and p pairs How many correspondences are needed? Tricky to write H analytically, but we can solve for it! Find such H that best transforms points p into p Use least-squares! Least Squares Example Say we have a set of data points (, ), (2,2 ), (3,3 ), etc. (e.g. person s height vs. weight) We want a nice compact formula (line) to predict s from s: a + b = We want to find a and b How many (, ) pairs do we need? ' ' a + b = a ' = Ax=B ' 2a + b = 2 2 b 2 What if the data is noisy? ' ' 2 a = 2 ' 3 b overconstrained min Ax B 2 Solving for homographies p = Hp wx' a b c x wy' = d e f y w g h i Can set scale factor i=. So, there are 8 unkowns. Set up a system of linear equations: Ah = b where vector of unknowns h = [a,b,c,d,e,f,g,h] T Note: we do not know w but we can compute it from x & y w=gx+hy+ The equations are linear in the unknown Solving for homographies p = Hp wx' a b c x wy' = d e f y w g h i Can set scale factor i=. So, there are 8 unkowns. Set up a system of linear equations: Ah = b where vector of unknowns h = [a,b,c,d,e,f,g,h] T Need at least 8 eqs, but the more the better Solve for h. If overconstrained, solve using least-squares: 2 min Ah b Can be done in Matlab using \ command see help lmdivide Panoramas. Pick one image (red) 2. Warp the other images towards it (usually, one by one) 3. blend 5





6 Recap Panorama = reprojection 3D rotation homography Homogeneous coordinates are kewl Use feature correspondence Solve least square problem Se of linear equations Warp all images to a reference one Use your favorite blending changing camera center Does it still work? PP2 synthetic PP PP Nodal point Planar mosaic Cool applications of homographies Oh, Durand & Dorsey Limitations of 2D Clone Brushing Distortions due to foreshortening and surface orientation 6



 (x,y,z) Project back into new (source) image (u,v) = (fx/z+uc,fy/z+vc)")
7 Clone brush (Photoshop) Perspective clone brush Click on a reference pixel (blue) Then start painting somewhere else Copy pixel color with a translation Oh, Durand, Dorsey, unpublished Correct for perspective And other tricks Rotational Mosaics Can we say something more about rotational mosaics? i.e. can we further constrain our H? 3D 2D Perspective Projection (c,c,zc) f uc u 3D Rotation Model Projection equations Project from image to 3D ray (x0,y0,z0) = (u0-uc,v0-vc,f) Rotate the ray by camera motion = R0 (x0,y0,z0) (x,y,z) Project back into new (source) image (u,v) = (fx/z+uc,fy/z+vc) Therefore: (x,y,z) (u,v,f) R (x,y,z) f (u,v,f) H = K0R0K K Our homography has only 3,4 or 5 DOF, depending if focal length is known, same, or different. This makes image registration much better behaved 7
![Pairwise alignment Rotation about vertical axis Procrustes Algorithm [Golub & VanLoan] Given two sets of matching points, compute R p i = R p i with 3D rays p i =N(x i,y i,z i ) = N(u i -u c,v i -v](/docs-images/77/74867058/images/8-3.jpg "c,f) A = Σ i p i p i T = Σ i p i p it R T = U S V T = (U S U T ) R T V T = U T R T R = VU T What if our camera rotates on a tripod? What s the structure of H? Do we have to project onto a plane?")
8 Pairwise alignment Rotation about vertical axis Procrustes Algorithm [Golub & VanLoan] Given two sets of matching points, compute R p i = R p i with 3D rays p i =N(x i,y i,z i ) = N(u i -u c,v i -v c,f) A = Σ i p i p i T = Σ i p i p it R T = U S V T = (U S U T ) R T V T = U T R T R = VU T What if our camera rotates on a tripod? What s the structure of H? Do we have to project onto a plane? Full Panoramas What if you want a 360 field of view? mosaic Projection Cylinder mosaic PP Cylindrical projection Cylindrical Projection Map 3D point (,,Z) onto cylinder Z Convert to cylindrical coordinates unit cylinder Convert to cylindrical image coordinates unwrapped cylinder cylindrical image 8

 panoramas Vertical Error accumulation small (vertical) errors accumulate over time apply correction so that sum = 0 (for 360 pan.")
9 Inverse Cylindrical projection Cylindrical panoramas (,,Z) (sinθ,h,cosθ) Z Steps Reproject each image onto a cylinder Blend Output the resulting mosaic What are the assumptions here? Cylindrical image stitching Assembling the panorama Stitch pairs together, blend, then crop What if you don t know the camera rotation? Solve for the camera rotations Note that a rotation of the camera is a translation of the cylinder! Problem: Drift Full-view (360 ) panoramas Vertical Error accumulation small (vertical) errors accumulate over time apply correction so that sum = 0 (for 360 pan.) Horizontal Error accumulation can reuse first/last image to find the right panorama radius 9
 onto")

 = (xˆ, yˆ, zˆ) Convert to")


 Z φ cos")
 Z p = R p")

10 Spherical projection Spherical Projection Map 3D point (,,Z) onto sphere ( xˆ, yˆ, zˆ) = (,, Z Z Convert to spherical coordinates (sinθ cosφ, sinφ, cosθ cosφ) = (xˆ, yˆ, zˆ) Convert to spherical image coordinates Z ) φ unwrapped sphere spherical image Inverse Spherical projection 3D rotation Rotate image before placing on unrolled sphere (x,y,z) (sinθcosφ,cosθcosφ,sinφ) Z φ cos sin φ φ cos θ cos φ (x,y,z) (sinθcosφ,cosθcosφ,sinφ) Z p = R p φ cos sin φ φ cos θ cos φ Full-view Panorama Polar Projection Extreme bending in ultra-wide fields of view



 Can use several images")



11 Other projections are possible Cylindrical reprojection top-down view ou can stitch on the plane and then warp the resulting panorama What s the limitation here? Or, you can use these as stitching surfaces But there is a catch What s your focal length, buddy? Image 384x300 Focal length the dirty secret f = 80 (pixels) f = 280 f = 380 Distortion Focal length is (highly!) camera dependant Can get a rough estimate by measuring FOV: No distortion Can use the EIF data tag (might not give the right thing) Can use several images together and try to find f that would make them match Can use a known 3D object and its projection to solve for f Etc. There are other camera parameters too: Optical center, non-square pixels, lens distortion, etc. Radial distortion Pin cushion Barrel Radial distortion of the image Caused by imperfect lenses Deviations are most noticeable for rays that pass through the edge of the lens Blending the mosaic Correct for bending in wide field of view lenses Use this instead of normal projection An example of image compositing: the art (and sometime science) of combining images together



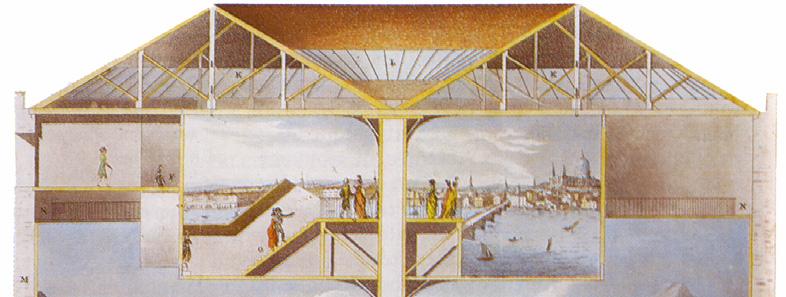
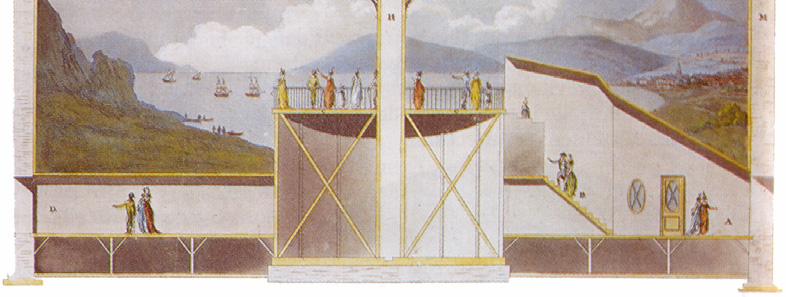
12 Multi-band Blending Multi-band Blending Burt & Adelson 983 Blend frequency bands over range λ Traditional panoramas 9 th century panorama Chinese scroll 2



13 Magic: automatic panos Magic: ghost removal See also HDR lecture M. Uyttendaele, A. Eden, and R. Szeliski. Eliminating ghosting and exposure artifacts in image mosaics. In Proceedings of the Interational Conference on Computer Vision and Pattern Recognition, volume 2, pages , Kauai, Hawaii, December 200. Magic: ghost removal See also HDR lecture M. Uyttendaele, A. Eden, and R. Szeliski. Eliminating ghosting and exposure artifacts in image mosaics. In Proceedings of the Interational Conference on Computer Vision and Pattern Recognition, volume 2, pages , Kauai, Hawaii, December 200. Extensions Video Additional objects Mok s panomorph kumarvb.pdf ww.sarnoff.comzszcareer_movezsztech_paperszszpdfzszvisre p95.pdf/kumar95representation.pdf tzky02.pdf Software =Tutorials Refs TR Sep27.pdf liskishum97.pdf disch-ozchi05.pdf 3
6.098 Digital and Computational Photography Advanced Computational Photography. Panoramas. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Bill Freeman Frédo Durand MIT - EECS Lots of slides stolen from Alyosha Efros, who stole them from Steve Seitz
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Bill Freeman Frédo Durand MIT - EECS Lots of slides stolen from Alyosha Efros, who stole them from Steve Seitz
More Mosaic Madness. CS194: Image Manipulation & Computational Photography. Steve Seitz and Rick Szeliski. Jeffrey Martin (jeffrey-martin.
 More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
Today s lecture. Image Alignment and Stitching. Readings. Motion models
 Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Image Warping and Mosacing
 Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
Announcements. Mosaics. How to do it? Image Mosaics
 Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image stitching. Announcements. Outline. Image stitching
 Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Image warping and stitching
 Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Announcements. Mosaics. Image Mosaics. How to do it? Basic Procedure Take a sequence of images from the same position =
 Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
Homographies and Mosaics
 Tri reort Homograhies and Mosaics Jeffrey Martin (jeffrey-martin.com) CS94: Image Maniulation & Comutational Photograhy with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 06 Steve Seitz and
Tri reort Homograhies and Mosaics Jeffrey Martin (jeffrey-martin.com) CS94: Image Maniulation & Comutational Photograhy with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 06 Steve Seitz and
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
Warping, Morphing and Mosaics
 Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
Computational Photograph and Video: Warping, Morphing and Mosaics Prof. Marc Pollefes Dr. Gabriel Brostow Toda s schedule Last week s recap Warping Morphing Mosaics Toda s schedule Last week s recap Warping
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
Image Stitching. Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi
 Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Image warping , , Computational Photography Fall 2017, Lecture 10
 Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
2D Image Transforms Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") 2D Image Transforms 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Extract features from an image what do we do next? Feature matching (object recognition, 3D reconstruction, augmented
2D Image Transforms 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Extract features from an image what do we do next? Feature matching (object recognition, 3D reconstruction, augmented
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Feature Matching and RANSAC
 Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Image-based Modeling and Rendering: 8. Image Transformation and Panorama
 Image-based Modeling and Rendering: 8. Image Transformation and Panorama I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung Univ, Taiwan Outline Image transformation How to represent the
Image-based Modeling and Rendering: 8. Image Transformation and Panorama I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung Univ, Taiwan Outline Image transformation How to represent the
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Affine and Projective Transformations
 CS 674: Intro to Computer Vision Affine and Projective Transformations Prof. Adriana Kovaska Universit of Pittsburg October 3, 26 Alignment problem We previousl discussed ow to matc features across images,
CS 674: Intro to Computer Vision Affine and Projective Transformations Prof. Adriana Kovaska Universit of Pittsburg October 3, 26 Alignment problem We previousl discussed ow to matc features across images,
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Image Warping. Many slides from Alyosha Efros + Steve Seitz. Photo by Sean Carroll
 Image Warping Man slides from Alosha Efros + Steve Seitz Photo b Sean Carroll Morphing Blend from one object to other with a series of local transformations Image Transformations image filtering: change
Image Warping Man slides from Alosha Efros + Steve Seitz Photo b Sean Carroll Morphing Blend from one object to other with a series of local transformations Image Transformations image filtering: change
Image-Based Modeling and Rendering. Image-Based Modeling and Rendering. Final projects IBMR. What we have learnt so far. What IBMR is about
 Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Computer Vision. Coordinates. Prof. Flávio Cardeal DECOM / CEFET- MG.
 Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Automatic Image Alignment
 Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Geometric Transformations and Image Warping
 Geometric Transformations and Image Warping Ross Whitaker SCI Institute, School of Computing University of Utah Univ of Utah, CS6640 2009 1 Geometric Transformations Greyscale transformations -> operate
Geometric Transformations and Image Warping Ross Whitaker SCI Institute, School of Computing University of Utah Univ of Utah, CS6640 2009 1 Geometric Transformations Greyscale transformations -> operate
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry
 CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
Introduction to Image Processing and Computer Vision. -- Panoramas and Blending --
 Introduction to Image Processing and Computer Vision -- Panoramas and Blending -- Winter 2013/14 Ivo Ihrke Panoramas Mosaics and Panoramas - Outline - Perspective Panoramas - Hardware-Based - Software-Based
Introduction to Image Processing and Computer Vision -- Panoramas and Blending -- Winter 2013/14 Ivo Ihrke Panoramas Mosaics and Panoramas - Outline - Perspective Panoramas - Hardware-Based - Software-Based
Image formation - About the course. Grading & Project. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 305) Hours Lecture: Tuesda 5:30-8:00pm, TTLMAN 403B Office hour: Tuesda 3:00-5:00pm, or b appointment Tetbook Computer Vision: Models,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 305) Hours Lecture: Tuesda 5:30-8:00pm, TTLMAN 403B Office hour: Tuesda 3:00-5:00pm, or b appointment Tetbook Computer Vision: Models,
Cameras and Stereo CSE 455. Linda Shapiro
 Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Perspective Projection [2 pts]
![Perspective Projection [2 pts]](/thumbs/77/75160998.jpg "Perspective Projection [2 pts]") Instructions: CSE252a Computer Vision Assignment 1 Instructor: Ben Ochoa Due: Thursday, October 23, 11:59 PM Submit your assignment electronically by email to iskwak+252a@cs.ucsd.edu with the subject line
Instructions: CSE252a Computer Vision Assignment 1 Instructor: Ben Ochoa Due: Thursday, October 23, 11:59 PM Submit your assignment electronically by email to iskwak+252a@cs.ucsd.edu with the subject line
Stitching and Blending
 Stitching and Blending Kari Pulli VP Computational Imaging Light First project Build your own (basic) programs panorama HDR (really, exposure fusion) The key components register images so their features
Stitching and Blending Kari Pulli VP Computational Imaging Light First project Build your own (basic) programs panorama HDR (really, exposure fusion) The key components register images so their features
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
CMPSCI 670: Computer Vision! Image formation. University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji
 CMPSCI 670: Computer Vision! Image formation University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji MATLAB setup and tutorial Does everyone have access to MATLAB yet? EdLab accounts
CMPSCI 670: Computer Vision! Image formation University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji MATLAB setup and tutorial Does everyone have access to MATLAB yet? EdLab accounts
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Image formation. Thanks to Peter Corke and Chuck Dyer for the use of some slides
 Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Computer Vision I Name : CSE 252A, Fall 2012 Student ID : David Kriegman Assignment #1. (Due date: 10/23/2012) x P. = z
 x P. = z") Computer Vision I Name : CSE 252A, Fall 202 Student ID : David Kriegman E-Mail : Assignment (Due date: 0/23/202). Perspective Projection [2pts] Consider a perspective projection where a point = z y x P
Computer Vision I Name : CSE 252A, Fall 202 Student ID : David Kriegman E-Mail : Assignment (Due date: 0/23/202). Perspective Projection [2pts] Consider a perspective projection where a point = z y x P
COMP30019 Graphics and Interaction Three-dimensional transformation geometry and perspective
 COMP30019 Graphics and Interaction Three-dimensional transformation geometry and perspective Department of Computing and Information Systems The Lecture outline Introduction Rotation about artibrary axis
COMP30019 Graphics and Interaction Three-dimensional transformation geometry and perspective Department of Computing and Information Systems The Lecture outline Introduction Rotation about artibrary axis
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Introduction to Computer Vision. Week 3, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
Compositing a bird's eye view mosaic
 Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
CS 2770: Intro to Computer Vision. Multiple Views. Prof. Adriana Kovashka University of Pittsburgh March 14, 2017
 CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS664 Lecture #16: Image registration, robust statistics, motion
 CS664 Lecture #16: Image registration, robust statistics, motion Some material taken from: Alyosha Efros, CMU http://www.cs.cmu.edu/~efros Xenios Papademetris http://noodle.med.yale.edu/~papad/various/papademetris_image_registration.p
CS664 Lecture #16: Image registration, robust statistics, motion Some material taken from: Alyosha Efros, CMU http://www.cs.cmu.edu/~efros Xenios Papademetris http://noodle.med.yale.edu/~papad/various/papademetris_image_registration.p
Local features and image matching May 8 th, 2018
 Local features and image matcing May 8 t, 2018 Yong Jae Lee UC Davis Last time RANSAC for robust fitting Lines, translation Image mosaics Fitting a 2D transformation Homograpy 2 Today Mosaics recap: How
Local features and image matcing May 8 t, 2018 Yong Jae Lee UC Davis Last time RANSAC for robust fitting Lines, translation Image mosaics Fitting a 2D transformation Homograpy 2 Today Mosaics recap: How
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Computer Vision CS 776 Fall 2018
 Computer Vision CS 776 Fall 2018 Cameras & Photogrammetry 1 Prof. Alex Berg (Slide credits to many folks on individual slides) Cameras & Photogrammetry 1 Albrecht Dürer early 1500s Brunelleschi, early
Computer Vision CS 776 Fall 2018 Cameras & Photogrammetry 1 Prof. Alex Berg (Slide credits to many folks on individual slides) Cameras & Photogrammetry 1 Albrecht Dürer early 1500s Brunelleschi, early
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
DD2429 Computational Photography :00-19:00
 . Examination: DD2429 Computational Photography 202-0-8 4:00-9:00 Each problem gives max 5 points. In order to pass you need about 0-5 points. You are allowed to use the lecture notes and standard list
. Examination: DD2429 Computational Photography 202-0-8 4:00-9:00 Each problem gives max 5 points. In order to pass you need about 0-5 points. You are allowed to use the lecture notes and standard list
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Automatic Image Alignment
 Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Targil 10 : Why Mosaic? Why is this a challenge? Exposure differences Scene illumination Miss-registration Moving objects
 Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 5 x 35 Targil : Panoramas - Stitching and Blending Some slides from Alexei Efros 2 Slide from Brown & Lowe Why Mosaic? Are you getting
Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 5 x 35 Targil : Panoramas - Stitching and Blending Some slides from Alexei Efros 2 Slide from Brown & Lowe Why Mosaic? Are you getting
Agenda. Perspective projection. Rotations. Camera models
 Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Single-view metrology
 Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Image Based Rendering. D.A. Forsyth, with slides from John Hart
 Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Warping. 12 May 2015
 Warping 12 May 2015 Warping, morphing, mosaic Slides from Durand and Freeman (MIT), Efros (CMU, Berkeley), Szeliski (MSR), Seitz (UW), Lowe (UBC) http://szeliski.org/book/ 2 Image Warping Image filtering:
Warping 12 May 2015 Warping, morphing, mosaic Slides from Durand and Freeman (MIT), Efros (CMU, Berkeley), Szeliski (MSR), Seitz (UW), Lowe (UBC) http://szeliski.org/book/ 2 Image Warping Image filtering:
3D Geometry and Camera Calibration
 3D Geometr and Camera Calibration 3D Coordinate Sstems Right-handed vs. left-handed 2D Coordinate Sstems ais up vs. ais down Origin at center vs. corner Will often write (u, v) for image coordinates v
3D Geometr and Camera Calibration 3D Coordinate Sstems Right-handed vs. left-handed 2D Coordinate Sstems ais up vs. ais down Origin at center vs. corner Will often write (u, v) for image coordinates v
CS223b Midterm Exam, Computer Vision. Monday February 25th, Winter 2008, Prof. Jana Kosecka
 CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
360 Full View Spherical Mosaic
 360 Full View Spherical Mosaic Huang Wenfan Huang Yehui Rong Nan U017865B U017844X U018274R Objective Full spherical mosaic 360 x 180. All images are taken with camera mounted on a tripod. Registration
360 Full View Spherical Mosaic Huang Wenfan Huang Yehui Rong Nan U017865B U017844X U018274R Objective Full spherical mosaic 360 x 180. All images are taken with camera mounted on a tripod. Registration
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
MATHEMATICS FOR ENGINEERING TUTORIAL 5 COORDINATE SYSTEMS
 MATHEMATICS FOR ENGINEERING TUTORIAL 5 COORDINATE SYSTEMS This tutorial is essential pre-requisite material for anyone studying mechanical engineering. This tutorial uses the principle of learning by example.
MATHEMATICS FOR ENGINEERING TUTORIAL 5 COORDINATE SYSTEMS This tutorial is essential pre-requisite material for anyone studying mechanical engineering. This tutorial uses the principle of learning by example.
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Recap. DoF Constraint Solver. translation. affine. homography. 3D rotation
 Image Blending Recap DoF Constraint Solver translation affine homography 3D rotation Recap DoF Constraint Solver translation 2 affine homography 3D rotation Recap DoF Constraint Solver translation 2 affine
Image Blending Recap DoF Constraint Solver translation affine homography 3D rotation Recap DoF Constraint Solver translation 2 affine homography 3D rotation Recap DoF Constraint Solver translation 2 affine
Video Mosaics for Virtual Environments, R. Szeliski. Review by: Christopher Rasmussen
 Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Instance-level recognition I. - Camera geometry and image alignment
 Reconnaissance d objets et vision artificielle 2011 Instance-level recognition I. - Camera geometry and image alignment Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire
Reconnaissance d objets et vision artificielle 2011 Instance-level recognition I. - Camera geometry and image alignment Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire
More Single View Geometry
 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Final Projects Are coming up fast! Undergrads
More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Final Projects Are coming up fast! Undergrads
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Introduction to Homogeneous coordinates
 Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically
Last class we considered smooth translations and rotations of the camera coordinate system and the resulting motions of points in the image projection plane. These two transformations were expressed mathematically