Computational Geometry
|
|
|
- Victoria Stephany Jackson
- 6 years ago
- Views:
Transcription
1 Computational Geometry
2 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex?
3 Convexity A set S is convex if it is the intersection of (possibly infinitely many) half-spaces. S p S q Not convex Convex?
4 Convex Hull Given a finite set of points P = {p 1,, p n } the convex hull of P is the smallest convex set C such that P C. C p 1 p 1 p n
5 Convex Hull In 2D, the convex hull of a set of points is made up of line segments with endpoints in P. C p 1 p 1 p n
 mesh with vertices in P.")
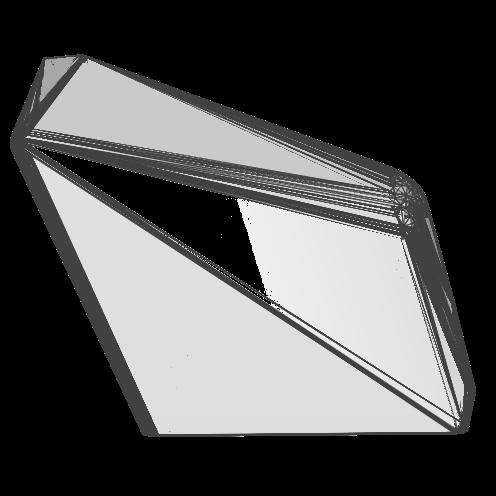
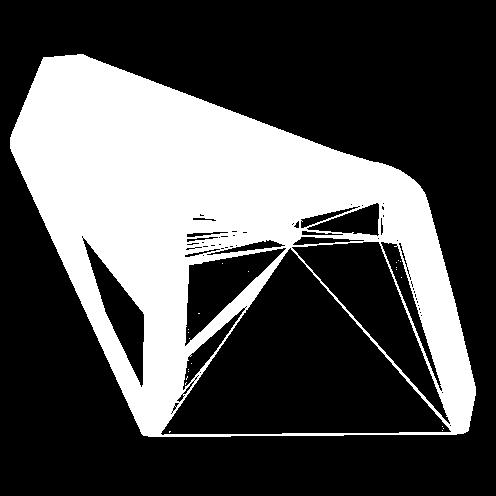
6 Convex Hull In 3D, the convex hull is a (triangle) mesh with vertices in P.
7 Computing the Convex Hull Brute Force (2D): Given a set of points P, test each line segment to see if it is an edge on the convex hull. p 1 p 1 Otherwise the segment is not on the hull If the rest of the points are on one side, the segment is on the hull p n
8 Computing the Convex Hull Brute Force (2D): Given a set of points P, test each line segment to see if it is an edge on the convex hull. If the rest of the points are on one side, the segment is on the hull p 1 p 1 Otherwise the segment is not on the hull Computational complexity is O(n 3 ): O(n) tests for each of p n O(n 2 ) edges. In d-dimensional space, the complexity is complexity is O(n d+1 )
9 Computing the Convex Hull Quick Hull: Key idea in general, it s easy to identify internal points, so discard those quickly and focus on points nearer to the boundary.
10 Computing the Convex Hull Quick Hull: Observation a point falling within any triangle has to be internal and can be discarded.
11 Computing the Convex Hull QH(S): Choose a, b S with min/max x-coordinate. A points to the right of ab. B points to the left of ab. return QH(A,a,b) QH(B,b,a)
12 Computing the Convex Hull QH(S,a,b): if S is empty, return ab. else c point furthest from ab. A points to the right of ac. B points to the right of cb. return QH(A,a,c) QH(B,c,b)
13 Computing the Convex Hull QH(S): Choose a, b S with min/max x-coordinate. A points to the right of ab. B points to the left of ab. return QH(A,a,b) QH(B,b,a) a b
14 Computing the Convex Hull QH(S): Choose a, b S with min/max x-coordinate. A points to the right of ab. B B points to the left of ab. return QH(A,a,b) QH(B,b,a) a A b
15 Computing the Convex Hull QH(S): Choose a, b S with min/max x-coordinate. A points to the right of ab. B points to the left of ab. return QH(A,a,b) QH(B,b,a) a A b
16 Computing the Convex Hull QH(S,a,b): if S is empty, return ab. else c point furthest from ab. A points to the right of ac. a b B points to the right of cb. return QH(A,a,c) QH(B,c,b) c
17 Computing the Convex Hull QH(S,a,b): if S is empty, return ab. else c point furthest from ab. A points to the right of ac. a b B points to the right of cb. return QH(A,a,c) QH(B,c,b) A c B
18 Computing the Convex Hull QH(S,a,b): if S is empty, return ab. else c point furthest from ab. A points to the right of ac. a b B points to the right of cb. return QH(A,a,c) QH(B,c,b) A c
19 Computing the Convex Hull QH(S,a,b): if S is empty, return ab. else c point furthest from ab. A points to the right of ac. a B points to the right of cb. return QH(A,a,c) QH(B,c,b) b
20 Computing the Convex Hull QH(S,a,b): if S is empty, return ab. else c point furthest from ab. A points to the right of ac. a b B points to the right of cb. return QH(A,a,c) QH(B,c,b) c B
21 Computing the Convex Hull QH(S,a,b): if S is empty, return ab. else c point furthest from ab. A points to the right of ac. b B points to the right of cb. return QH(A,a,c) QH(B,c,b) a c
22 Computing the Convex Hull QH(S,a,b): if S is empty, return ab. else c point furthest from ab. A points to the right of ac. B points to the right of cb. return QH(A,a,c) QH(B,c,b) a A c b B
23 Computing the Convex Hull QH(S,a,b): if S is empty, return ab. else c point furthest from ab. A points to the right of ac. B points to the right of cb. return QH(A,a,c) QH(B,c,b) a A c b B
24 Computing the Convex Hull QH(S): Choose a, b S with min/max x-coordinate. A points to the right of ab. B B points to the left of ab. return QH(A,a,b) QH(B,b,a) a b
25 Computing the Convex Hull QH(S): Choose a, b S with min/max x-coordinate. A points to the right of ab. B points to the left of ab. return QH(A,a,b) QH(B,b,a) Worst-case complexity O(n 2 ) In practice runs in O(n logn)
26 Voronoi Diagrams Given a finite set of points P the Voronoi Diagram of P is a partition of space into regions R p such that the points in R p are closer to p P than to any other q P.
27 Voronoi Diagrams Claim: The Voronoi regions, R p, are convex. Proof: Given any other point q P, we can define the half-space H pq of points closer to p than q. q p
28 Voronoi Diagrams Claim: The Voronoi regions, R p, are convex. Proof: Doing this for all q P, we get R p as the intersection of half-spaces. q q p q q q
29 Voronoi Diagrams Properties: p R p for all p P.
30 Voronoi Diagrams Properties: Edges are equidistant to two points in P: We can center a circle on any point on a Voronoi edge whose interior is empty but is tangent to two points.
31 Voronoi Diagrams Properties: Vertices are equidistant to three points in P. We can center a circumscribing circle on any Voronoi vertex whose interior is empty but is tangent to three points.
32 Delaunay Triangulations We can construct the dual graph by: Adding edges between pairs of points defining a Voronoi edge Adding triangles between triplets of points defining a Vornoi vertex Need to show that this actually a triangulation: e.g. Edges don t cross
33 Delaunay Triangulations Properties: The DT is a triangulation of the convex hull. Each D-edge/triangle can be circumscribed by an empty circle. Note that the circle circumscribing a D-triangle does not have to be centered in the triangle. Note that the smallest circle circumscribing a D-edge does not have to be empty.
34 Computation Given a Voronoi diagram, we can obtain the Delaunay triangulation by computing the dual graph, w/ vertices at points p P. Given a Delaunay triangulation, we can obtain the Voronoi diagram by computing the dual graph, w/ vertices at circum-centers. How do we compute either?
35 Computation Claim: We can compute the Delaunay triangulation of a point set by lifting the points to a paraboloid: x, y (x, y, x 2 + y 2 ) and computing the lower convex hull.
36 Computation Proof: Given a point (a, b, a 2 + b 2 ) on the paraboloid, The projection the tangent of the points plane of intersection is given onto by: the 2D z plane = 2ax is a circle + 2by with radius (a 2 r + around b 2 ) (a,b)! Shifting the plane up by r 2 we get the plane: z = 2ax + 2by a 2 + b 2 + r 2 The shifted plane intersect the paraboloid at: z = x 2 + y 2 = 2ax + 2by a 2 + b 2 + r 2 x a 2 + y b 2 = r 2
37 Proof: Computation If we have a triangle on the lower convex hull, we can pass a plane through the three vertices. We can drop the plane by r 2 so that it is tangent to the paraboloid. Then the projected vertices of the triangle must lie on a circle of radius r around the point (a, b). r 2 (a,a 2 ) r a
38 Proof: Computation Since the original plane was on the lower hull, all other points must be above. We can raise the plane until it intersects any other point. The distance from the projection of the point onto the 2D to (a, b) must be larger than r. The circle of radius r around (a, b) contains no other points. a r 2 + ε 2 r 2 (a,a 2 ) r 2 + ε 2 1 2
39 Definition Given a DT of a set of points, we set G α to be the simplices whose circum-spheres are empty and whose radii are smaller than α. We set the C α to be the α-complex, by taking the union of the elements in G α with simplices on the boundary. The α-shape, C α, is the union of all simplices in C α.
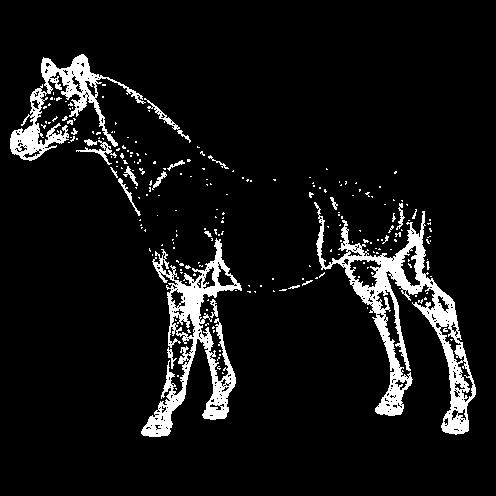
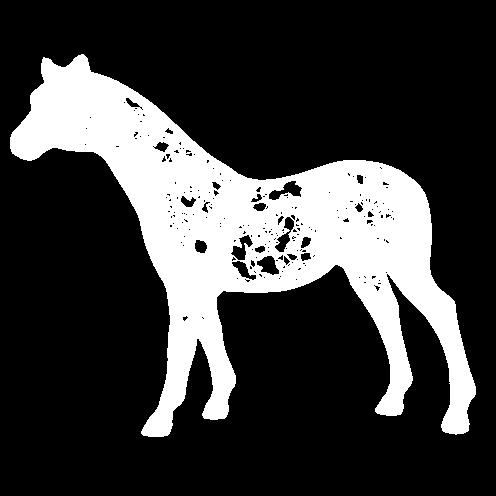
40 Alpha Shapes Can be comprised of triangles, as well as dangling edges and disconnected vertices. Provides a family of shapes ranging from the convex hull (α = ) to just the points (α = 0).
41
42 Contribution The paper presents a new approach for surface reconstruction. It extends earlier work on 2D alpha shapes, describing implementation in 3D.
43 Key Idea The Delauany Triangulation encodes the building blocks for tets/faces/edges of possible reconstructions. Select from a family of possible reconstructions by grading the simplices and keep those finer than a specified cut-off.
44 Limitations The method is not guaranteed to generate a manifold surface. The method implicitly assumes that sampling is uniform. It is not clear how well the method works for points sets sampled from a 2D manifold in 3D (can have sliver simplices with large radii).
45 Guarantees The family of shapes nest ( C α C β for all α < β).
46 Computational Complexity The single computation of the Delaunay Triangulation, O(n 2 ), can be used to define the whole family of shapes.
47 Generalizability The method can be extended to arbitrary dimensions. It can be applied to use weighted points (e.g. if sampling density is known)
Voronoi Diagrams and Delaunay Triangulations. O Rourke, Chapter 5
 Voronoi Diagrams and Delaunay Triangulations O Rourke, Chapter 5 Outline Preliminaries Properties and Applications Computing the Delaunay Triangulation Preliminaries Given a function f: R 2 R, the tangent
Voronoi Diagrams and Delaunay Triangulations O Rourke, Chapter 5 Outline Preliminaries Properties and Applications Computing the Delaunay Triangulation Preliminaries Given a function f: R 2 R, the tangent
Other Voronoi/Delaunay Structures
 Other Voronoi/Delaunay Structures Overview Alpha hulls (a subset of Delaunay graph) Extension of Voronoi Diagrams Convex Hull What is it good for? The bounding region of a point set Not so good for describing
Other Voronoi/Delaunay Structures Overview Alpha hulls (a subset of Delaunay graph) Extension of Voronoi Diagrams Convex Hull What is it good for? The bounding region of a point set Not so good for describing
Lifting Transform, Voronoi, Delaunay, Convex Hulls
 Lifting Transform, Voronoi, Delaunay, Convex Hulls Subhash Suri Department of Computer Science University of California Santa Barbara, CA 93106 1 Lifting Transform (A combination of Pless notes and my
Lifting Transform, Voronoi, Delaunay, Convex Hulls Subhash Suri Department of Computer Science University of California Santa Barbara, CA 93106 1 Lifting Transform (A combination of Pless notes and my
3. Voronoi Diagrams. 3.1 Definitions & Basic Properties. Examples :
 3. Voronoi Diagrams Examples : 1. Fire Observation Towers Imagine a vast forest containing a number of fire observation towers. Each ranger is responsible for extinguishing any fire closer to her tower
3. Voronoi Diagrams Examples : 1. Fire Observation Towers Imagine a vast forest containing a number of fire observation towers. Each ranger is responsible for extinguishing any fire closer to her tower
Voronoi Diagrams. A Voronoi diagram records everything one would ever want to know about proximity to a set of points
 Voronoi Diagrams Voronoi Diagrams A Voronoi diagram records everything one would ever want to know about proximity to a set of points Who is closest to whom? Who is furthest? We will start with a series
Voronoi Diagrams Voronoi Diagrams A Voronoi diagram records everything one would ever want to know about proximity to a set of points Who is closest to whom? Who is furthest? We will start with a series
Computational Geometry
 Lecture 12: Lecture 12: Motivation: Terrains by interpolation To build a model of the terrain surface, we can start with a number of sample points where we know the height. Lecture 12: Motivation: Terrains
Lecture 12: Lecture 12: Motivation: Terrains by interpolation To build a model of the terrain surface, we can start with a number of sample points where we know the height. Lecture 12: Motivation: Terrains
Voronoi diagram and Delaunay triangulation
 Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015 Outline 1 Voronoi
Voronoi diagram and Delaunay triangulation Ioannis Emiris & Vissarion Fisikopoulos Dept. of Informatics & Telecommunications, University of Athens Computational Geometry, spring 2015 Outline 1 Voronoi
Voronoi diagrams Delaunay Triangulations. Pierre Alliez Inria
 Voronoi diagrams Delaunay Triangulations Pierre Alliez Inria Voronoi Diagram Voronoi Diagram Voronoi Diagram The collection of the non-empty Voronoi regions and their faces, together with their incidence
Voronoi diagrams Delaunay Triangulations Pierre Alliez Inria Voronoi Diagram Voronoi Diagram Voronoi Diagram The collection of the non-empty Voronoi regions and their faces, together with their incidence
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass
 Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Three-Dimensional α Shapes
 Herbert Edelsbrunner and Ernst P. Mücke ACM Tran. Graph. 13(1), 1994 20 September 2005 1 2 α-complexes Edelsbrunner s Algorithm 3 Properties Surface Reconstruction Shape Question Given a set of points,
Herbert Edelsbrunner and Ernst P. Mücke ACM Tran. Graph. 13(1), 1994 20 September 2005 1 2 α-complexes Edelsbrunner s Algorithm 3 Properties Surface Reconstruction Shape Question Given a set of points,
6.854J / J Advanced Algorithms Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 6.854J / 18.415J Advanced Algorithms Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 18.415/6.854 Advanced
MIT OpenCourseWare http://ocw.mit.edu 6.854J / 18.415J Advanced Algorithms Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 18.415/6.854 Advanced
Optimal Compression of a Polyline with Segments and Arcs
 Optimal Compression of a Polyline with Segments and Arcs Alexander Gribov Esri 380 New York Street Redlands, CA 92373 Email: agribov@esri.com arxiv:1604.07476v5 [cs.cg] 10 Apr 2017 Abstract This paper
Optimal Compression of a Polyline with Segments and Arcs Alexander Gribov Esri 380 New York Street Redlands, CA 92373 Email: agribov@esri.com arxiv:1604.07476v5 [cs.cg] 10 Apr 2017 Abstract This paper
Definitions. Topology/Geometry of Geodesics. Joseph D. Clinton. SNEC June Magnus J. Wenninger
 Topology/Geometry of Geodesics Joseph D. Clinton SNEC-04 28-29 June 2003 Magnus J. Wenninger Introduction Definitions Topology Goldberg s polyhedra Classes of Geodesic polyhedra Triangular tessellations
Topology/Geometry of Geodesics Joseph D. Clinton SNEC-04 28-29 June 2003 Magnus J. Wenninger Introduction Definitions Topology Goldberg s polyhedra Classes of Geodesic polyhedra Triangular tessellations
Chapter 8. Voronoi Diagrams. 8.1 Post Oce Problem
 Chapter 8 Voronoi Diagrams 8.1 Post Oce Problem Suppose there are n post oces p 1,... p n in a city. Someone who is located at a position q within the city would like to know which post oce is closest
Chapter 8 Voronoi Diagrams 8.1 Post Oce Problem Suppose there are n post oces p 1,... p n in a city. Someone who is located at a position q within the city would like to know which post oce is closest
274 Curves on Surfaces, Lecture 5
 274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
Advanced Algorithms Computational Geometry Prof. Karen Daniels. Fall, 2012
 UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 Voronoi Diagrams & Delaunay Triangulations O Rourke: Chapter 5 de Berg et al.: Chapters 7,
UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 Voronoi Diagrams & Delaunay Triangulations O Rourke: Chapter 5 de Berg et al.: Chapters 7,
CS133 Computational Geometry
 CS133 Computational Geometry Voronoi Diagram Delaunay Triangulation 5/17/2018 1 Nearest Neighbor Problem Given a set of points P and a query point q, find the closest point p P to q p, r P, dist p, q dist(r,
CS133 Computational Geometry Voronoi Diagram Delaunay Triangulation 5/17/2018 1 Nearest Neighbor Problem Given a set of points P and a query point q, find the closest point p P to q p, r P, dist p, q dist(r,
Lecture 1 Discrete Geometric Structures
 Lecture 1 Discrete Geometric Structures Jean-Daniel Boissonnat Winter School on Computational Geometry and Topology University of Nice Sophia Antipolis January 23-27, 2017 Computational Geometry and Topology
Lecture 1 Discrete Geometric Structures Jean-Daniel Boissonnat Winter School on Computational Geometry and Topology University of Nice Sophia Antipolis January 23-27, 2017 Computational Geometry and Topology
Outline of the presentation
 Surface Reconstruction Petra Surynková Charles University in Prague Faculty of Mathematics and Physics petra.surynkova@mff.cuni.cz Outline of the presentation My work up to now Surfaces of Building Practice
Surface Reconstruction Petra Surynková Charles University in Prague Faculty of Mathematics and Physics petra.surynkova@mff.cuni.cz Outline of the presentation My work up to now Surfaces of Building Practice
Introduction to Voronoi Diagrams and Delaunay Triangulations
 Introduction to Voronoi Diagrams and Delaunay Triangulations Solomon Boulos Introduction to Voronoi Diagrams and Delaunay Triangulations p.1 Voronoi Diagrams Voronoi region: V (p i ) = {x R n p i x p j
Introduction to Voronoi Diagrams and Delaunay Triangulations Solomon Boulos Introduction to Voronoi Diagrams and Delaunay Triangulations p.1 Voronoi Diagrams Voronoi region: V (p i ) = {x R n p i x p j
Voronoi Diagram. Xiao-Ming Fu
 Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Tiling Three-Dimensional Space with Simplices. Shankar Krishnan AT&T Labs - Research
 Tiling Three-Dimensional Space with Simplices Shankar Krishnan AT&T Labs - Research What is a Tiling? Partition of an infinite space into pieces having a finite number of distinct shapes usually Euclidean
Tiling Three-Dimensional Space with Simplices Shankar Krishnan AT&T Labs - Research What is a Tiling? Partition of an infinite space into pieces having a finite number of distinct shapes usually Euclidean
In what follows, we will focus on Voronoi diagrams in Euclidean space. Later, we will generalize to other distance spaces.
 Voronoi Diagrams 4 A city builds a set of post offices, and now needs to determine which houses will be served by which office. It would be wasteful for a postman to go out of their way to make a delivery
Voronoi Diagrams 4 A city builds a set of post offices, and now needs to determine which houses will be served by which office. It would be wasteful for a postman to go out of their way to make a delivery
Simplicial Complexes: Second Lecture
 Simplicial Complexes: Second Lecture 4 Nov, 2010 1 Overview Today we have two main goals: Prove that every continuous map between triangulable spaces can be approximated by a simplicial map. To do this,
Simplicial Complexes: Second Lecture 4 Nov, 2010 1 Overview Today we have two main goals: Prove that every continuous map between triangulable spaces can be approximated by a simplicial map. To do this,
The Farthest Point Delaunay Triangulation Minimizes Angles
 The Farthest Point Delaunay Triangulation Minimizes Angles David Eppstein Department of Information and Computer Science UC Irvine, CA 92717 November 20, 1990 Abstract We show that the planar dual to the
The Farthest Point Delaunay Triangulation Minimizes Angles David Eppstein Department of Information and Computer Science UC Irvine, CA 92717 November 20, 1990 Abstract We show that the planar dual to the
Notes in Computational Geometry Voronoi Diagrams
 Notes in Computational Geometry Voronoi Diagrams Prof. Sandeep Sen and Prof. Amit Kumar Indian Institute of Technology, Delhi Voronoi Diagrams In this lecture, we study Voronoi Diagrams, also known as
Notes in Computational Geometry Voronoi Diagrams Prof. Sandeep Sen and Prof. Amit Kumar Indian Institute of Technology, Delhi Voronoi Diagrams In this lecture, we study Voronoi Diagrams, also known as
High-Dimensional Computational Geometry. Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018
 High-Dimensional Computational Geometry Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018 Outline 3-D vector geometry High-D hyperplane intersections Convex hull & its extension to 3
High-Dimensional Computational Geometry Jingbo Shang University of Illinois at Urbana-Champaign Mar 5, 2018 Outline 3-D vector geometry High-D hyperplane intersections Convex hull & its extension to 3
Fortune s Algorithm. Notes from the book by de Berg, Van Krevald, Overmars, and Schwarzkpf
 Notes from the book by de Berg, Van Krevald, Overmars, and Schwarzkpf Based on sweeping the plane with a horizontal line and computing the Voronoi diagram as the line sweeps Straight forward approach won
Notes from the book by de Berg, Van Krevald, Overmars, and Schwarzkpf Based on sweeping the plane with a horizontal line and computing the Voronoi diagram as the line sweeps Straight forward approach won
Approximating a set of points by circles
 Approximating a set of points by circles Sandra Gesing June 2005 Abstract This paper is an abstract of the German diploma thesis Approximation von Punktmengen durch Kreise finished by the author in March
Approximating a set of points by circles Sandra Gesing June 2005 Abstract This paper is an abstract of the German diploma thesis Approximation von Punktmengen durch Kreise finished by the author in March
Topology Homework 3. Section Section 3.3. Samuel Otten
 Topology Homework 3 Section 3.1 - Section 3.3 Samuel Otten 3.1 (1) Proposition. The intersection of finitely many open sets is open and the union of finitely many closed sets is closed. Proof. Note that
Topology Homework 3 Section 3.1 - Section 3.3 Samuel Otten 3.1 (1) Proposition. The intersection of finitely many open sets is open and the union of finitely many closed sets is closed. Proof. Note that
2 Delaunay Triangulations
 and the closed half-space H(b, a) containingb and with boundary the bisector hyperplane is the locus of all points such that (b 1 a 1 )x 1 + +(b m a m )x m (b 2 1 + + b 2 m)/2 (a 2 1 + + a 2 m)/2. The
and the closed half-space H(b, a) containingb and with boundary the bisector hyperplane is the locus of all points such that (b 1 a 1 )x 1 + +(b m a m )x m (b 2 1 + + b 2 m)/2 (a 2 1 + + a 2 m)/2. The
Computational Geometry. Algorithm Design (10) Computational Geometry. Convex Hull. Areas in Computational Geometry
 Computational Geometry. Convex Hull. Areas in Computational Geometry") Computational Geometry Algorithm Design (10) Computational Geometry Graduate School of Engineering Takashi Chikayama Algorithms formulated as geometry problems Broad application areas Computer Graphics,
Computational Geometry Algorithm Design (10) Computational Geometry Graduate School of Engineering Takashi Chikayama Algorithms formulated as geometry problems Broad application areas Computer Graphics,
Voronoi Diagrams in the Plane. Chapter 5 of O Rourke text Chapter 7 and 9 of course text
 Voronoi Diagrams in the Plane Chapter 5 of O Rourke text Chapter 7 and 9 of course text Voronoi Diagrams As important as convex hulls Captures the neighborhood (proximity) information of geometric objects
Voronoi Diagrams in the Plane Chapter 5 of O Rourke text Chapter 7 and 9 of course text Voronoi Diagrams As important as convex hulls Captures the neighborhood (proximity) information of geometric objects
Delaunay Triangulations
 Delaunay Triangulations (slides mostly by Glenn Eguchi) Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally approximate height of points not
Delaunay Triangulations (slides mostly by Glenn Eguchi) Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally approximate height of points not
A Polynomial Time Algorithm for Multivariate Interpolation in Arbitrary Dimension via the Delaunay Triangulation
 A Polynomial Time Algorithm for Multivariate Interpolation in Arbitrary Dimension via the Delaunay Triangulation Tyler Chang, Layne Watson, Thomas Lux, Bo Li, Li Xu, Ali Butt, Kirk Cameron, and Yili Hong
A Polynomial Time Algorithm for Multivariate Interpolation in Arbitrary Dimension via the Delaunay Triangulation Tyler Chang, Layne Watson, Thomas Lux, Bo Li, Li Xu, Ali Butt, Kirk Cameron, and Yili Hong
Lines That Intersect Circles
 LESSON 11-1 Lines That Intersect Circles Lesson Objectives (p. 746): Vocabulary 1. Interior of a circle (p. 746): 2. Exterior of a circle (p. 746): 3. Chord (p. 746): 4. Secant (p. 746): 5. Tangent of
LESSON 11-1 Lines That Intersect Circles Lesson Objectives (p. 746): Vocabulary 1. Interior of a circle (p. 746): 2. Exterior of a circle (p. 746): 3. Chord (p. 746): 4. Secant (p. 746): 5. Tangent of
Computational Geometry Lecture Delaunay Triangulation
 Computational Geometry Lecture Delaunay Triangulation INSTITUTE FOR THEORETICAL INFORMATICS FACULTY OF INFORMATICS 7.12.2015 1 Modelling a Terrain Sample points p = (x p, y p, z p ) Projection π(p) = (p
Computational Geometry Lecture Delaunay Triangulation INSTITUTE FOR THEORETICAL INFORMATICS FACULTY OF INFORMATICS 7.12.2015 1 Modelling a Terrain Sample points p = (x p, y p, z p ) Projection π(p) = (p
Voronoi Diagrams, Delaunay Triangulations and Polytopes
 Voronoi Diagrams, Delaunay Triangulations and Polytopes Jean-Daniel Boissonnat MPRI, Lecture 2 Computational Geometry Learning Voronoi, Delaunay & Polytopes MPRI, Lecture 2 1 / 43 Voronoi diagrams in nature
Voronoi Diagrams, Delaunay Triangulations and Polytopes Jean-Daniel Boissonnat MPRI, Lecture 2 Computational Geometry Learning Voronoi, Delaunay & Polytopes MPRI, Lecture 2 1 / 43 Voronoi diagrams in nature
CAD & Computational Geometry Course plan
 Course plan Introduction Segment-Segment intersections Polygon Triangulation Intro to Voronoï Diagrams & Geometric Search Sweeping algorithm for Voronoï Diagrams 1 Voronoi Diagrams Voronoi Diagrams or
Course plan Introduction Segment-Segment intersections Polygon Triangulation Intro to Voronoï Diagrams & Geometric Search Sweeping algorithm for Voronoï Diagrams 1 Voronoi Diagrams Voronoi Diagrams or
VoroCrust: Simultaneous Surface Reconstruction and Volume Meshing with Voronoi cells
 VoroCrust: Simultaneous Surface Reconstruction and Volume Meshing with Voronoi cells Scott A. Mitchell (speaker), joint work with Ahmed H. Mahmoud, Ahmad A. Rushdi, Scott A. Mitchell, Ahmad Abdelkader
VoroCrust: Simultaneous Surface Reconstruction and Volume Meshing with Voronoi cells Scott A. Mitchell (speaker), joint work with Ahmed H. Mahmoud, Ahmad A. Rushdi, Scott A. Mitchell, Ahmad Abdelkader
1 Appendix to notes 2, on Hyperbolic geometry:
 1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
Möbius Transformations in Scientific Computing. David Eppstein
 Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Motion Planning. O Rourke, Chapter 8
 O Rourke, Chapter 8 Outline Translating a polygon Moving a ladder Shortest Path (Point-to-Point) Goal: Given disjoint polygons in the plane, and given positions s and t, find the shortest path from s to
O Rourke, Chapter 8 Outline Translating a polygon Moving a ladder Shortest Path (Point-to-Point) Goal: Given disjoint polygons in the plane, and given positions s and t, find the shortest path from s to
Lesson 2: Basic Concepts of Geometry
 : Basic Concepts of Geometry Learning Target I can identify the difference between a figure notation and its measurements I can list collinear and non collinear points I can find the distance / length
: Basic Concepts of Geometry Learning Target I can identify the difference between a figure notation and its measurements I can list collinear and non collinear points I can find the distance / length
66 III Complexes. R p (r) }.
 }.") 66 III Complexes III.4 Alpha Complexes In this section, we use a radius constraint to introduce a family of subcomplexes of the Delaunay complex. These complexes are similar to the Čech complexes but differ
66 III Complexes III.4 Alpha Complexes In this section, we use a radius constraint to introduce a family of subcomplexes of the Delaunay complex. These complexes are similar to the Čech complexes but differ
CS 532: 3D Computer Vision 14 th Set of Notes
 1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
Delaunay Triangulations. Presented by Glenn Eguchi Computational Geometry October 11, 2001
 Delaunay Triangulations Presented by Glenn Eguchi 6.838 Computational Geometry October 11, 2001 Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally
Delaunay Triangulations Presented by Glenn Eguchi 6.838 Computational Geometry October 11, 2001 Motivation: Terrains Set of data points A R 2 Height ƒ(p) defined at each point p in A How can we most naturally
We have already studied equations of the line. There are several forms:
 Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
notes13.1inclass May 01, 2015
 Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
CS S Lecture February 13, 2017
 CS 6301.008.18S Lecture February 13, 2017 Main topics are #Voronoi-diagrams, #Fortune. Quick Note about Planar Point Location Last week, I started giving a difficult analysis of the planar point location
CS 6301.008.18S Lecture February 13, 2017 Main topics are #Voronoi-diagrams, #Fortune. Quick Note about Planar Point Location Last week, I started giving a difficult analysis of the planar point location
Surface Mesh Generation
 Surface Mesh Generation J.-F. Remacle Université catholique de Louvain September 22, 2011 0 3D Model For the description of the mesh generation process, let us consider the CAD model of a propeller presented
Surface Mesh Generation J.-F. Remacle Université catholique de Louvain September 22, 2011 0 3D Model For the description of the mesh generation process, let us consider the CAD model of a propeller presented
COMPUTING CONSTRAINED DELAUNAY
 COMPUTING CONSTRAINED DELAUNAY TRIANGULATIONS IN THE PLANE By Samuel Peterson, University of Minnesota Undergraduate The Goal The Problem The Algorithms The Implementation Applications Acknowledgments
COMPUTING CONSTRAINED DELAUNAY TRIANGULATIONS IN THE PLANE By Samuel Peterson, University of Minnesota Undergraduate The Goal The Problem The Algorithms The Implementation Applications Acknowledgments
2D Geometry. Pierre Alliez Inria Sophia Antipolis
 2D Geometry Pierre Alliez Inria Sophia Antipolis Outline Sample problems Polygons Graphs Convex hull Voronoi diagram Delaunay triangulation Sample Problems Line Segment Intersection Theorem: Segments (p
2D Geometry Pierre Alliez Inria Sophia Antipolis Outline Sample problems Polygons Graphs Convex hull Voronoi diagram Delaunay triangulation Sample Problems Line Segment Intersection Theorem: Segments (p
Topological Data Analysis - I. Afra Zomorodian Department of Computer Science Dartmouth College
 Topological Data Analysis - I Afra Zomorodian Department of Computer Science Dartmouth College September 3, 2007 1 Acquisition Vision: Images (2D) GIS: Terrains (3D) Graphics: Surfaces (3D) Medicine: MRI
Topological Data Analysis - I Afra Zomorodian Department of Computer Science Dartmouth College September 3, 2007 1 Acquisition Vision: Images (2D) GIS: Terrains (3D) Graphics: Surfaces (3D) Medicine: MRI
Math 3315: Geometry Vocabulary Review Human Dictionary: WORD BANK
 Math 3315: Geometry Vocabulary Review Human Dictionary: WORD BANK [acute angle] [acute triangle] [adjacent interior angle] [alternate exterior angles] [alternate interior angles] [altitude] [angle] [angle_addition_postulate]
Math 3315: Geometry Vocabulary Review Human Dictionary: WORD BANK [acute angle] [acute triangle] [adjacent interior angle] [alternate exterior angles] [alternate interior angles] [altitude] [angle] [angle_addition_postulate]
Computational Geometry. Definition, Application Areas, and Course Overview
 Computational Geometry Definition, Application Areas, and Course Overview Computational Geometry is a subfield of the Design and Analysis of Algorithms Computational Geometry is a subfield of the Design
Computational Geometry Definition, Application Areas, and Course Overview Computational Geometry is a subfield of the Design and Analysis of Algorithms Computational Geometry is a subfield of the Design
We have already studied equations of the line. There are several forms:
 Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
The Medial Axis of the Union of Inner Voronoi Balls in the Plane
 The Medial Axis of the Union of Inner Voronoi Balls in the Plane Joachim Giesen a, Balint Miklos b,, Mark Pauly b a Max-Planck Institut für Informatik, Saarbrücken, Germany b Applied Geometry Group, ETH
The Medial Axis of the Union of Inner Voronoi Balls in the Plane Joachim Giesen a, Balint Miklos b,, Mark Pauly b a Max-Planck Institut für Informatik, Saarbrücken, Germany b Applied Geometry Group, ETH
Topological estimation using witness complexes. Vin de Silva, Stanford University
 Topological estimation using witness complexes, Acknowledgements Gunnar Carlsson (Mathematics, Stanford) principal collaborator Afra Zomorodian (CS/Robotics, Stanford) persistent homology software Josh
Topological estimation using witness complexes, Acknowledgements Gunnar Carlsson (Mathematics, Stanford) principal collaborator Afra Zomorodian (CS/Robotics, Stanford) persistent homology software Josh
Computational Geometry Lecture Duality of Points and Lines
 Computational Geometry Lecture Duality of Points and Lines INSTITUTE FOR THEORETICAL INFORMATICS FACULTY OF INFORMATICS 11.1.2016 Duality Transforms We have seen duality for planar graphs and duality of
Computational Geometry Lecture Duality of Points and Lines INSTITUTE FOR THEORETICAL INFORMATICS FACULTY OF INFORMATICS 11.1.2016 Duality Transforms We have seen duality for planar graphs and duality of
Polygon Triangulation
 Polygon Triangulation Definition Simple Polygons 1. A polygon is the region of a plane bounded by a finite collection of line segments forming a simple closed curve. 2. Simple closed curve means a certain
Polygon Triangulation Definition Simple Polygons 1. A polygon is the region of a plane bounded by a finite collection of line segments forming a simple closed curve. 2. Simple closed curve means a certain
GEOMETRY CCR MATH STANDARDS
 CONGRUENCE, PROOF, AND CONSTRUCTIONS M.GHS. M.GHS. M.GHS. GEOMETRY CCR MATH STANDARDS Mathematical Habits of Mind. Make sense of problems and persevere in solving them.. Use appropriate tools strategically..
CONGRUENCE, PROOF, AND CONSTRUCTIONS M.GHS. M.GHS. M.GHS. GEOMETRY CCR MATH STANDARDS Mathematical Habits of Mind. Make sense of problems and persevere in solving them.. Use appropriate tools strategically..
Inversive Plane Geometry
 Inversive Plane Geometry An inversive plane is a geometry with three undefined notions: points, circles, and an incidence relation between points and circles, satisfying the following three axioms: (I.1)
Inversive Plane Geometry An inversive plane is a geometry with three undefined notions: points, circles, and an incidence relation between points and circles, satisfying the following three axioms: (I.1)
Week 8 Voronoi Diagrams
 1 Week 8 Voronoi Diagrams 2 Voronoi Diagram Very important problem in Comp. Geo. Discussed back in 1850 by Dirichlet Published in a paper by Voronoi in 1908 3 Voronoi Diagram Fire observation towers: an
1 Week 8 Voronoi Diagrams 2 Voronoi Diagram Very important problem in Comp. Geo. Discussed back in 1850 by Dirichlet Published in a paper by Voronoi in 1908 3 Voronoi Diagram Fire observation towers: an
Definition 1 (Hand-shake model). A hand shake model is an incidence geometry for which every line has exactly two points.
. A hand shake model is an incidence geometry for which every line has exactly two points.") Math 3181 Dr. Franz Rothe Name: All3181\3181_spr13t1.tex 1 Solution of Test I Definition 1 (Hand-shake model). A hand shake model is an incidence geometry for which every line has exactly two points. Definition
Math 3181 Dr. Franz Rothe Name: All3181\3181_spr13t1.tex 1 Solution of Test I Definition 1 (Hand-shake model). A hand shake model is an incidence geometry for which every line has exactly two points. Definition
Planar Graphs. 1 Graphs and maps. 1.1 Planarity and duality
 Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
COMPUTATIONAL GEOMETRY
 Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
2 Geometry Solutions
 2 Geometry Solutions jacques@ucsd.edu Here is give problems and solutions in increasing order of difficulty. 2.1 Easier problems Problem 1. What is the minimum number of hyperplanar slices to make a d-dimensional
2 Geometry Solutions jacques@ucsd.edu Here is give problems and solutions in increasing order of difficulty. 2.1 Easier problems Problem 1. What is the minimum number of hyperplanar slices to make a d-dimensional
APPROXIMATING THE MAXMIN AND MINMAX AREA TRIANGULATIONS USING ANGULAR CONSTRAINTS. J. Mark Keil, Tzvetalin S. Vassilev
 Serdica J. Computing 4 00, 3 334 APPROXIMATING THE MAXMIN AND MINMAX AREA TRIANGULATIONS USING ANGULAR CONSTRAINTS J. Mark Keil, Tzvetalin S. Vassilev Abstract. We consider sets of points in the two-dimensional
Serdica J. Computing 4 00, 3 334 APPROXIMATING THE MAXMIN AND MINMAX AREA TRIANGULATIONS USING ANGULAR CONSTRAINTS J. Mark Keil, Tzvetalin S. Vassilev Abstract. We consider sets of points in the two-dimensional
Midpoint Routing algorithms for Delaunay Triangulations
 Midpoint Routing algorithms for Delaunay Triangulations Weisheng Si and Albert Y. Zomaya Centre for Distributed and High Performance Computing School of Information Technologies Prologue The practical
Midpoint Routing algorithms for Delaunay Triangulations Weisheng Si and Albert Y. Zomaya Centre for Distributed and High Performance Computing School of Information Technologies Prologue The practical
Molecular Shapes and Surfaces *
 OpenStax-CNX module: m11616 1 Molecular Shapes and Surfaces * Lydia E. Kavraki This work is produced by OpenStax-CNX and licensed under the Creative Commons Attribution License 1.0 Topics in this Module
OpenStax-CNX module: m11616 1 Molecular Shapes and Surfaces * Lydia E. Kavraki This work is produced by OpenStax-CNX and licensed under the Creative Commons Attribution License 1.0 Topics in this Module
Common Core Cluster. Experiment with transformations in the plane. Unpacking What does this standard mean that a student will know and be able to do?
 Congruence G.CO Experiment with transformations in the plane. G.CO.1 Know precise definitions of angle, circle, perpendicular line, parallel line, and line segment, based on the undefined notions of point,
Congruence G.CO Experiment with transformations in the plane. G.CO.1 Know precise definitions of angle, circle, perpendicular line, parallel line, and line segment, based on the undefined notions of point,
3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College
![3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College](/thumbs/90/102029124.jpg "3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College") 3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hulls The problem: Given a set P of points, compute their convex hull 2D 3D 2D 3D polygon polyhedron Polyhedron region
3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hulls The problem: Given a set P of points, compute their convex hull 2D 3D 2D 3D polygon polyhedron Polyhedron region
Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College
![Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College](/thumbs/86/93358306.jpg "Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College") Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull Given a set P of points in 2D, their convex hull is the smallest convex polygon that contains all points
Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull Given a set P of points in 2D, their convex hull is the smallest convex polygon that contains all points
District 200 Geometry (I, A) Common Core Curriculum
 Common Core Curriculum") Length: Two Semesters Prerequisite: Algebra 1 or equivalent District 200 Geometry (I, A) Common Core Curriculum How to read this document: CC.9-12.N.Q.2 Reason quantitatively and use units to solve problems.
Length: Two Semesters Prerequisite: Algebra 1 or equivalent District 200 Geometry (I, A) Common Core Curriculum How to read this document: CC.9-12.N.Q.2 Reason quantitatively and use units to solve problems.
Tight Cocone DIEGO SALUME SEPTEMBER 18, 2013
 Tight Cocone DIEGO SALUME SEPTEMBER 18, 2013 Summary Problem: The Cocone algorithm produces surfaces with holes and artifacts in undersampled areas in the data. Solution: Extend the Cocone algorithm to
Tight Cocone DIEGO SALUME SEPTEMBER 18, 2013 Summary Problem: The Cocone algorithm produces surfaces with holes and artifacts in undersampled areas in the data. Solution: Extend the Cocone algorithm to
Outline. CGAL par l exemplel. Current Partners. The CGAL Project.
 CGAL par l exemplel Computational Geometry Algorithms Library Raphaëlle Chaine Journées Informatique et GéomG ométrie 1 er Juin 2006 - LIRIS Lyon Outline Overview Strengths Design Structure Kernel Convex
CGAL par l exemplel Computational Geometry Algorithms Library Raphaëlle Chaine Journées Informatique et GéomG ométrie 1 er Juin 2006 - LIRIS Lyon Outline Overview Strengths Design Structure Kernel Convex
Basic tool: orientation tests
 Basic tool: orientation tests Vera Sacristán Computational Geometry Facultat d Informàtica de Barcelona Universitat Politècnica de Catalunya Orientation test in R 2 Given 3 points p,, r in the plane, efficiently
Basic tool: orientation tests Vera Sacristán Computational Geometry Facultat d Informàtica de Barcelona Universitat Politècnica de Catalunya Orientation test in R 2 Given 3 points p,, r in the plane, efficiently
Spectral Surface Reconstruction from Noisy Point Clouds
 Spectral Surface Reconstruction from Noisy Point Clouds 1. Briefly summarize the paper s contributions. Does it address a new problem? Does it present a new approach? Does it show new types of results?
Spectral Surface Reconstruction from Noisy Point Clouds 1. Briefly summarize the paper s contributions. Does it address a new problem? Does it present a new approach? Does it show new types of results?
Geometry. Cluster: Experiment with transformations in the plane. G.CO.1 G.CO.2. Common Core Institute
 Geometry Cluster: Experiment with transformations in the plane. G.CO.1: Know precise definitions of angle, circle, perpendicular line, parallel line, and line segment, based on the undefined notions of
Geometry Cluster: Experiment with transformations in the plane. G.CO.1: Know precise definitions of angle, circle, perpendicular line, parallel line, and line segment, based on the undefined notions of
Grade 9, 10 or 11- Geometry
 Grade 9, 10 or 11- Geometry Strands 1. Congruence, Proof, and Constructions 2. Similarity, Proof, and Trigonometry 3. Extending to Three Dimensions 4. Connecting Algebra and Geometry through Coordinates
Grade 9, 10 or 11- Geometry Strands 1. Congruence, Proof, and Constructions 2. Similarity, Proof, and Trigonometry 3. Extending to Three Dimensions 4. Connecting Algebra and Geometry through Coordinates
Chapter 4 Concepts from Geometry
 Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
Dual Complexes of Cubical Subdivisions of R n
 Dual Complexes of Cubical Subdivisions of R n Herbert Edelsbrunner and Michael Kerber Abstract We use a distortion to define the dual complex of a cubical subdivision of R n as an n-dimensional subcomplex
Dual Complexes of Cubical Subdivisions of R n Herbert Edelsbrunner and Michael Kerber Abstract We use a distortion to define the dual complex of a cubical subdivision of R n as an n-dimensional subcomplex
Topology 550A Homework 3, Week 3 (Corrections: February 22, 2012)
") Topology 550A Homework 3, Week 3 (Corrections: February 22, 2012) Michael Tagare De Guzman January 31, 2012 4A. The Sorgenfrey Line The following material concerns the Sorgenfrey line, E, introduced in
Topology 550A Homework 3, Week 3 (Corrections: February 22, 2012) Michael Tagare De Guzman January 31, 2012 4A. The Sorgenfrey Line The following material concerns the Sorgenfrey line, E, introduced in
Standards to Topics. Common Core State Standards 2010 Geometry
 Standards to Topics G-CO.01 Know precise definitions of angle, circle, perpendicular line, parallel line, and line segment, based on the undefined notions of point, line, distance along a line, and distance
Standards to Topics G-CO.01 Know precise definitions of angle, circle, perpendicular line, parallel line, and line segment, based on the undefined notions of point, line, distance along a line, and distance
Common Core Specifications for Geometry
 1 Common Core Specifications for Geometry Examples of how to read the red references: Congruence (G-Co) 2-03 indicates this spec is implemented in Unit 3, Lesson 2. IDT_C indicates that this spec is implemented
1 Common Core Specifications for Geometry Examples of how to read the red references: Congruence (G-Co) 2-03 indicates this spec is implemented in Unit 3, Lesson 2. IDT_C indicates that this spec is implemented
Simulations of the quadrilateral-based localization
 Simulations of the quadrilateral-based localization Cluster success rate v.s. node degree. Each plot represents a simulation run. 9/15/05 Jie Gao CSE590-fall05 1 Random deployment Poisson distribution
Simulations of the quadrilateral-based localization Cluster success rate v.s. node degree. Each plot represents a simulation run. 9/15/05 Jie Gao CSE590-fall05 1 Random deployment Poisson distribution
The aim is to find an average between two objects Not an average of two images of objects but an image of the average object!
 The aim is to find an average between two objects Not an average of two images of objects but an image of the average object! How can we make a smooth transition in time? Do a weighted average over time
The aim is to find an average between two objects Not an average of two images of objects but an image of the average object! How can we make a smooth transition in time? Do a weighted average over time
Lecture 3 Randomized Algorithms
 Lecture 3 Randomized Algorithms Jean-Daniel Boissonnat Winter School on Computational Geometry and Topology University of Nice Sophia Antipolis January 23-27, 2017 Computational Geometry and Topology Randomized
Lecture 3 Randomized Algorithms Jean-Daniel Boissonnat Winter School on Computational Geometry and Topology University of Nice Sophia Antipolis January 23-27, 2017 Computational Geometry and Topology Randomized
Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here)
") Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here) Voronoi Diagram & Delaunay Triangualtion Algorithms Divide-&-Conquer Plane Sweep Lifting
Voronoi Diagrams and Delaunay Triangulation slides by Andy Mirzaian (a subset of the original slides are used here) Voronoi Diagram & Delaunay Triangualtion Algorithms Divide-&-Conquer Plane Sweep Lifting
Approximating Polygonal Objects by Deformable Smooth Surfaces
 Approximating Polygonal Objects by Deformable Smooth Surfaces Ho-lun Cheng and Tony Tan School of Computing, National University of Singapore hcheng,tantony@comp.nus.edu.sg Abstract. We propose a method
Approximating Polygonal Objects by Deformable Smooth Surfaces Ho-lun Cheng and Tony Tan School of Computing, National University of Singapore hcheng,tantony@comp.nus.edu.sg Abstract. We propose a method
Lecture Tessellations, fractals, projection. Amit Zoran. Advanced Topics in Digital Design
 Lecture Tessellations, fractals, projection Amit Zoran Advanced Topics in Digital Design 67682 The Rachel and Selim Benin School of Computer Science and Engineering The Hebrew University of Jerusalem,
Lecture Tessellations, fractals, projection Amit Zoran Advanced Topics in Digital Design 67682 The Rachel and Selim Benin School of Computer Science and Engineering The Hebrew University of Jerusalem,
Advanced Algorithms Computational Geometry Prof. Karen Daniels. Fall, 2012
 UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 O Rourke Chapter 7 Search & Intersection Chapter 7 Search & Intersection Segment-Segment Intersection
UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Fall, 2012 O Rourke Chapter 7 Search & Intersection Chapter 7 Search & Intersection Segment-Segment Intersection
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
Further Graphics. A Brief Introduction to Computational Geometry
 Further Graphics A Brief Introduction to Computational Geometry 1 Alex Benton, University of Cambridge alex@bentonian.com Supported in part by Google UK, Ltd Terminology We ll be focusing on discrete (as
Further Graphics A Brief Introduction to Computational Geometry 1 Alex Benton, University of Cambridge alex@bentonian.com Supported in part by Google UK, Ltd Terminology We ll be focusing on discrete (as
PS Computational Geometry Homework Assignment Sheet I (Due 16-March-2018)
") Homework Assignment Sheet I (Due 16-March-2018) Assignment 1 Let f, g : N R with f(n) := 8n + 4 and g(n) := 1 5 n log 2 n. Prove explicitly that f O(g) and f o(g). Assignment 2 How can you generalize the
Homework Assignment Sheet I (Due 16-March-2018) Assignment 1 Let f, g : N R with f(n) := 8n + 4 and g(n) := 1 5 n log 2 n. Prove explicitly that f O(g) and f o(g). Assignment 2 How can you generalize the
CSE 5311 Notes 13: Computational Geometry
 CSE 5311 Notes 13: Computational Geometry (Last updated 4/17/17 4:39 PM) SMALLEST ENCLOSING DISK See section 4.7 of de Berg ( http://dx.doi.org.ezproxy.uta.edu/10.1007/978-3-540-77974-2 ) Algorithm MINIDISC(P)
CSE 5311 Notes 13: Computational Geometry (Last updated 4/17/17 4:39 PM) SMALLEST ENCLOSING DISK See section 4.7 of de Berg ( http://dx.doi.org.ezproxy.uta.edu/10.1007/978-3-540-77974-2 ) Algorithm MINIDISC(P)
UNM - PNM STATEWIDE MATHEMATICS CONTEST XLI. February 7, 2009 Second Round Three Hours
 UNM - PNM STATEWIDE MATHEMATICS CONTEST XLI February 7, 009 Second Round Three Hours (1) An equilateral triangle is inscribed in a circle which is circumscribed by a square. This square is inscribed in
UNM - PNM STATEWIDE MATHEMATICS CONTEST XLI February 7, 009 Second Round Three Hours (1) An equilateral triangle is inscribed in a circle which is circumscribed by a square. This square is inscribed in
Geometric Computations for Simulation
 1 Geometric Computations for Simulation David E. Johnson I. INTRODUCTION A static virtual world would be boring and unlikely to draw in a user enough to create a sense of immersion. Simulation allows things
1 Geometric Computations for Simulation David E. Johnson I. INTRODUCTION A static virtual world would be boring and unlikely to draw in a user enough to create a sense of immersion. Simulation allows things
Geometry Definitions and Theorems. Chapter 9. Definitions and Important Terms & Facts
 Geometry Definitions and Theorems Chapter 9 Definitions and Important Terms & Facts A circle is the set of points in a plane at a given distance from a given point in that plane. The given point is the
Geometry Definitions and Theorems Chapter 9 Definitions and Important Terms & Facts A circle is the set of points in a plane at a given distance from a given point in that plane. The given point is the