Flavor of Computational Geometry. Convex Hull in 2D. Shireen Y. Elhabian Aly A. Farag University of Louisville
|
|
|
- Percival May
- 6 years ago
- Views:
Transcription

1 Flavor of Computational Geometry Convex Hull in 2D Shireen Y. Elhabian Aly A. Farag University of Louisville February 2010
2 Agenda Introduction Definitions of Convexity and Convex Hulls Naïve Algorithms for Extreme Points Gift Wrapping QuickHull Graham s Algorithm Incremental Algorithm
3 Introduction







4 Convex hull (or the hull) is perhaps the most commonly used structure in computational geometry. It can be used in various applications, let s mention a few here; Having a robot which tries to avoid obstacles as it moves, if its convex hull succeeded to avoid such obstacles, the robot itself won t hit any of them. Hence computing paths for robots which avoid collision becomes much easier if we are dealing with a convex robot rather than a non-convex one. Obstacle Robot Convex Hull Robot Goal

5 In some applications, we need to find the rectangle with the smallest area which encloses a certain polygon. It was found that such rectangle has one of its sides coincides with the convex hull of the polygon. Hence computing the hull can be used as the first step of minimum rectangle algorithms. Likewise, finding the smallest 3- dimensional box surrounding certain object in space will definitely depend on computing the convex hull of such object.



 the polygon and its")
 deficiencies of")

6 In the field of shape analysis, shapes can be classified for matching purposes by their convex deficiency trees, which are structures that mainly depend on finding convex hulls. Example of convex deficiency tree (a) the polygon and its convex hull (b) deficiencies and their hulls (c) deficiencies of polygons from (b), (d) deficiency of the one nonconvex piece from (c). (a) (b) (c) (d)
7 Informally, The convex hull of a set of points in the plane is the shape taken by a rubber band stretched around nails pounded into the plane at each point. The boundary of the convex hull of points in three dimensions is the shape taken by plastic wrap stretched tightly around the points. Now let s move for more formal definitions for convexity and convex hulls.
8 Definitions of Convexity and Convex Hulls
9 y x It should be clear that for a given polygon, any region with a dent is not convex, since two points spanning the dent can be found such that the segment they determine contains points exterior to the polygon, hence any polygon with a reflex vertex is not convex.
10

11

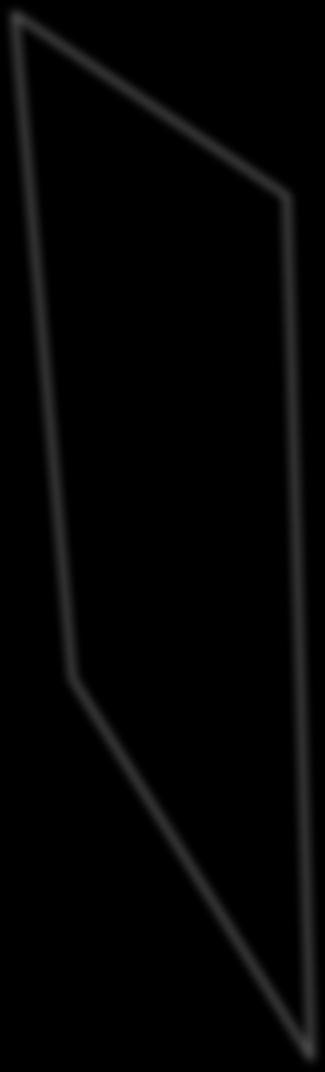
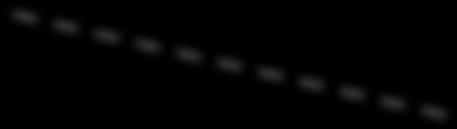
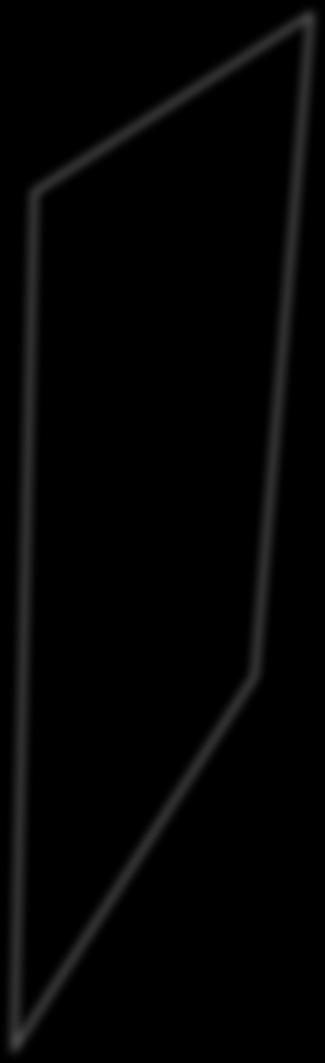
12 Note that the convex hull of a set is a closed "solid" region, including all the points inside. Often the term is used more loosely in computational geometry to mean the boundary of this region, since it is the boundary we compute, and that implies the region. We will use the phrase "on the hull" to mean "on the boundary of the convex hull." An example of a convex hull (dashed line) surrounding a given polygon
13 We will be concentrating on algorithms for constructing the boundary of the convex hull of a finite set of points in two dimensions, starting from inefficient algorithms, gradually working towards an optimal algorithm. However, before starting talking about algorithms, we should first know what we expect from such algorithms, in particular what do we mean by constructing the boundary? Four outputs can be distinguished: All points on the hull in arbitrary order The extreme points in arbitrary order All the points on the hull in boundary traversal order The extreme points in boundary traversal order






14 Extreme points Non-extreme points Extreme points are the vertices of the convex hull at which the interior angle is strictly convex, i.e. less than
.")
15 Let us concentrate on identifying the extreme points. Note that the highest point of S, the one with the largest y coordinate, is extreme if it is unique, or even if there are exactly two equally highest vertices (both can then be extreme). The same is of course true of the lowest points, the rightmost points, and the leftmost points. It should be clear that a point is extreme if and only if there exists a line through that point that otherwise does not touch the convex hull. Such "there exists" formulations, however, do not immediately suggest a method of find such extreme points. Extreme points A point is extreme if and only if there exists a line through that point that otherwise does not touch the convex hull. Non-extreme points
16 Naïve Algorithms for Extreme Points Let us therefore look at the other side of the coin, the non-extreme points.
17 Non-extreme Points Logically, if we identify the non-extreme points, this would be enough to identify the extreme points, hence let s define nonextreme point
18
19 Extreme Edges However, it is somewhat easier to identify extreme edges rather than non-extreme (interior) points, where extreme edges are edges of the convex hull.

20 S Extreme Edge Non-extreme Edge Let S be a set of distinct points, the red line is an extreme edge since every point of S is on or to one side of the line determined by that edge, on the other hand, the blue line is not an extreme edge since there are some points in S which lie on the right of the line determined by such edge.
21 S y z x
22 Gift Wrapping Let s now move to a more realistic hull algorithm. With a minor variation on the Extreme Edge algorithm, we can both accelerate it by a factor of n and at the same time output the points in the order in which they occur around the hull boundary.
23 S x θ e Let the red line be a detected extreme edge with x be the unlinked endpoint, we need to search for the next extreme edge e which will share the unlinked endpoint x. The next edge e makes the smallest angle θ with respect to the previous edge.
24 QuickHull The basic idea is very simple; Intuitively, we can discard many points which are interior to the hull and then concentrate on those points which are closer to the hull boundary.
25
26 b c y a x
27 Graham s Algorithm Now, it is time for the most efficient algorithm to compute the convex hull of a given set of points in plane which operates in O(nlogn) time
28 Top Level Description The basic idea of Graham's algorithm is quite simple. We will first explain it with an example, making several assumptions that will be removed later. Let s assume the general position assumption where there is no three points in the given set are collinear.
29 d b e 4 c a g -4 f -2 2 x h i -2 j Example for Graham s algorithms, x = (2,1); S= {(7,4),(6,5),(3,3),(0,5),(-2,3),(-2,2),(-5,1),(0,0),(-3,-2),(3,-2)}.
30 d b e 4 c a g -4 f -2 2 x h i -2 j Example for Graham s algorithms, x = (2,1); S= {(7,4),(6,5),(3,3),(0,5),(-2,3),(-2,2),(-5,1),(0,0),(-3,-2),(3,-2)}.
31 d b e 4 c a g -4 f -2 2 x h i -2 j Example for Graham s algorithms, x = (2,1); S= {(7,4),(6,5),(3,3),(0,5),(-2,3),(-2,2),(-5,1),(0,0),(-3,-2),(3,-2)}.
32 d b e 4 c a g -4 f -2 2 x h i -2 j Example for Graham s algorithms, x = (2,1); S= {(7,4),(6,5),(3,3),(0,5),(-2,3),(-2,2),(-5,1),(0,0),(-3,-2),(3,-2)}.
33 d b e 4 c a g -4 f -2 2 x h i -2 j Example for Graham s algorithms, x = (2,1); S= {(7,4),(6,5),(3,3),(0,5),(-2,3),(-2,2),(-5,1),(0,0),(-3,-2),(3,-2)}.
34 d b e 4 c a g -4 f -2 2 x h i -2 j Example for Graham s algorithms, x = (2,1); S= {(7,4),(6,5),(3,3),(0,5),(-2,3),(-2,2),(-5,1),(0,0),(-3,-2),(3,-2)}.
35 Pseudo code, Version A Let s now summarize the rough algorithm in the following pseudo code, where we assume stack primitives Push(p, S) and Pop(S), which push p onto the top of the stack S, and pop the top off, respectively. We use t to index the stack top and i for the angularly sorted points.
36 Details: Boundary Conditions Now it is time to discuss details related to various boundary conditions which have been ignored so far.

37 Start and Stop of Loop
38 Sorting Origin
39 x New sorting origin for the points in the previous example, where the lowest rightmost point is considered to be our origin around which other points are angularly sorted.
40 Collinearities The final "boundary condition" we consider is the possibility that three or more points are collinear. This issue affects several aspects of the algorithm. First we focus on defining precisely what we seek as output.
41
42 x Sorting points with collinearities, indices indicate sorting rank, points to be deleted are shown as open circles.
43 Pseudo code, Version B
44 Incremental Algorithm The difficulty is that Graham's algorithm has no obvious extension to three dimensions: It depends crucially on angular sorting, which has no direct counterpart in three dimensions. So we now proceed to describe one further algorithm in two dimensions which can be extended to three dimensions.
45
46
47
48 left j+1 j j-1 p Q!left i+1 i-1 i left


49 Flavor of Computational Geometry Convex Hull in 3D Shireen Y. Elhabian Aly A. Farag University of Louisville February 2010
50 Agenda Polyhedra Introduction Regular Polytopes Euler s Formula Incremental Algorithm in 3D
51 Polyhedra The focus of this section is discussing algorithm for constructing the convex hull of a set of points in three dimensions. We will also touch basis on some properties of polyhedra and how to represent polyhedra.
52 Introduction
53 In this section we are mainly concerned with convex polyhedra, which are simpler than general polyhedra. The boundary or surface of a polyhedron is composed of three types of geometric objects: zero-dimensional vertices (0-cells, i.e. points), one-dimensional edges (1-cells, i.e. segments), and two-dimensional faces (2-cells, i.e. polygons). Faces can be convex polygons, which are defined to be bounded, without losing generality, since non-convex polygons/faces can be partitioned into convex ones, however we must then allow adjacent faces to share the same plane, i.e. coplanar.
54 There are certain conditions which should be satisfied to construct a valid polyhedral surface, such conditions defines how polyhedral surface components are related to each other. We have three types of conditions: The components intersect "properly," the local topology is "proper," and the global topology is "proper." Now let s discuss these conditions in details

55 1. Components intersect "properly." For each pair of faces, we require that either they are disjoint, or they have a single vertex in common, or they have two vertices, and the edge joining them, in common. A B C Having convex faces simplifies these conditions. Improper intersections include not only penetrating faces, but also faces touching in the "wrong" way. Faces A and B meet face C improperly even though they do not penetrate C There is no need to specify conditions on the intersection of edges and vertices, as the condition on faces covers them also. Thus an improper intersection of a pair of edges implies an improper intersection of faces.
56 2. Local topology is "proper." Geometrically, the local topology is what the surface looks like in the vicinity of a point. This notion can be made precise via the notion of neighborhoods which are arbitrarily small portions (open regions) of the surface surrounding a point. The points should have neighborhoods that are topological twodimensional disks, i.e. neighborhoods of every point on the surface is "homeomorphic" to a disk, where a homeomorphism between two regions permits stretching and bending, but no tearing. A bug walking on the surface would find the neighborhood of every point to be topologically like a disk. A surface for which every point have a neighborhood homeomorphic to an open disc is called a 2-manifold, which is a class more general than the boundaries of polyhedra.
















57 2. Local topology is "proper." Moving to a combinatorial description to this condition, suppose we triangulate the polygonal faces, then every vertex is the apex of a number of triangles. Let s define the link of a vertex as follows; One consequence of this condition is that every edge is shared by exactly two faces. Vertex v Faces share v Link of vertex v Polyhedron An example of a valid polyhedral surface, where the link of a vertex v is defined to be the collection of edges opposite to v in all the triangles incident to v. Thus the link is in a sense the combinatorial neighborhood of v. For a legal triangulated polyhedron, we require that the link of every vertex be a simple, closed polygonal path.
 a closed polygonal")
58 Example of (a) a simple polygonal chain (b) a selfintersecting polygonal chain and (c) a closed polygonal chain (a) (c) (b)






 is not")

59 (a) (b) (c) Three objects that are not polyhedra. In all three cases, a neighborhood of the circled point is not homeomorphic to an open disk. In (a) the point lies both on the top surface shown and on a similar surface underneath. Object (c) is not closed, so the indicated point's neighborhood is a half-disk.
60 3. Global topology is "proper." We would like the surface to be connected, closed, and bounded. So we require that the surface be connected in the sense that from any point, one may walk to any other point on the surface. This can be stated combinatorially by requiring that the 1-skeleton, the graph of edges and vertices, be connected. Such condition with emphasizing having a finite number of faces, our previous conditions already imply closed and bounded surfaces. One might be inclined to rule out "holes" in the definition of polyhedron, holes in the sense of "channels" from one side of the surface to the other that do not disconnect the exterior (unlike cavities). Should a torus (a shape like a doughnut) be a polyhedron? We adopt the usual terminology and permit polyhedra to have an arbitrary number of such holes. The number of holes is called the genus of the surface. Normally we will only consider polyhedra with genus zero: those topologically equivalent to the surface of a sphere.
61 In Summary The boundary of a polyhedron is a finite collection of planar, bounded convex polygonal faces such that: the faces intersect properly; the neighborhood of every point is topologically an open disk, or (equivalently) the link of every vertex is a simple polygonal chain; and the surface is connected, or (equivalently) the 1-skeleton is connected. The boundary is closed and encloses a bounded region of space. Every edge is shared by exactly two faces; these faces are called adjacent.
.")
62 The dihedral angle (pale red) is the part of the space between two half-planes (pale blue).
63 Regular Polytopes
64 The surprising implication of these regularity conditions is that there are only five distinct types of regular polytopes. These are known as the Platonic solids. We now prove that there are exactly five regular polytopes. The proof is very elementary. The intuition is that the internal angles of a regular polygon grow large with the number of vertices of the polygon.
65
66
67
68 Tetrahedron Cube Octahedron Dodecahedron Icosahedron

69 Euler s Formula Leonhard Paul Euler (15 April September 1783) was a pioneering Swiss mathematician and physicist who spent most of his life in Russia and Germany. Euler made important discoveries in fields as diverse as calculus and graph theory. He also introduced much of the modern mathematical terminology and notation, particularly for mathematical analysis, such as the notion of a mathematical function.
70 In 1758 Leonard Euler noticed a remarkable regularity in the numbers of vertices, edges, and faces of a polyhedron of genus zero: The number of vertices and faces together is always two more than the number of edges; and this is true for all polyhedra. So a cube has 8 vertices and 6 faces, and = 14 is two more than its 12 edges. And the remaining regular polytopes can be seen to satisfy the same relationship.
71 Incremental Algorithm in 3D
72
73







74 (a) (b)






75 (a) (b)
76
77
78
79 Thanks
Week 7 Convex Hulls in 3D
 1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
Convex Hulls in Three Dimensions. Polyhedra
 Convex Hulls in Three Dimensions Polyhedra Polyhedron 1.A polyhedron is the generalization of a 2- D polygon to 3-D A finite number of flat polygonal faces The boundary or surface of a polyhedron - Zero-dimensional
Convex Hulls in Three Dimensions Polyhedra Polyhedron 1.A polyhedron is the generalization of a 2- D polygon to 3-D A finite number of flat polygonal faces The boundary or surface of a polyhedron - Zero-dimensional
A Flavor of Topology. Shireen Elhabian and Aly A. Farag University of Louisville January 2010
 A Flavor of Topology Shireen Elhabian and Aly A. Farag University of Louisville January 2010 In 1670 s I believe that we need another analysis properly geometric or linear, which treats place directly
A Flavor of Topology Shireen Elhabian and Aly A. Farag University of Louisville January 2010 In 1670 s I believe that we need another analysis properly geometric or linear, which treats place directly
Euler Characteristic
 Euler Characteristic Rebecca Robinson May 15, 2007 Euler Characteristic Rebecca Robinson 1 PLANAR GRAPHS 1 Planar graphs v = 5, e = 4, f = 1 v e + f = 2 v = 6, e = 7, f = 3 v = 4, e = 6, f = 4 v e + f
Euler Characteristic Rebecca Robinson May 15, 2007 Euler Characteristic Rebecca Robinson 1 PLANAR GRAPHS 1 Planar graphs v = 5, e = 4, f = 1 v e + f = 2 v = 6, e = 7, f = 3 v = 4, e = 6, f = 4 v e + f
Convex Hulls (3D) O Rourke, Chapter 4
 O Rourke, Chapter 4") Convex Hulls (3D) O Rourke, Chapter 4 Outline Polyhedra Polytopes Euler Characteristic (Oriented) Mesh Representation Polyhedra Definition: A polyhedron is a solid region in 3D space whose boundary is
Convex Hulls (3D) O Rourke, Chapter 4 Outline Polyhedra Polytopes Euler Characteristic (Oriented) Mesh Representation Polyhedra Definition: A polyhedron is a solid region in 3D space whose boundary is
1. CONVEX POLYGONS. Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D.
 1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
Question. Why is the third shape not convex?
 1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
Computational Geometry
 Lecture 1: Introduction and convex hulls Geometry: points, lines,... Geometric objects Geometric relations Combinatorial complexity Computational geometry Plane (two-dimensional), R 2 Space (three-dimensional),
Lecture 1: Introduction and convex hulls Geometry: points, lines,... Geometric objects Geometric relations Combinatorial complexity Computational geometry Plane (two-dimensional), R 2 Space (three-dimensional),
Planar Graphs. 1 Graphs and maps. 1.1 Planarity and duality
 Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
INTRODUCTION TO GRAPH THEORY. 1. Definitions
 INTRODUCTION TO GRAPH THEORY D. JAKOBSON 1. Definitions A graph G consists of vertices {v 1, v 2,..., v n } and edges {e 1, e 2,..., e m } connecting pairs of vertices. An edge e = (uv) is incident with
INTRODUCTION TO GRAPH THEORY D. JAKOBSON 1. Definitions A graph G consists of vertices {v 1, v 2,..., v n } and edges {e 1, e 2,..., e m } connecting pairs of vertices. An edge e = (uv) is incident with
Zipper Unfoldings of Polyhedral Complexes
 Zipper Unfoldings of Polyhedral Complexes Erik D. Demaine Martin L. Demaine Anna Lubiw Arlo Shallit Jonah L. Shallit Abstract We explore which polyhedra and polyhedral complexes can be formed by folding
Zipper Unfoldings of Polyhedral Complexes Erik D. Demaine Martin L. Demaine Anna Lubiw Arlo Shallit Jonah L. Shallit Abstract We explore which polyhedra and polyhedral complexes can be formed by folding
We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance.
 Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
1 Appendix to notes 2, on Hyperbolic geometry:
 1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
Geometric Modeling Mortenson Chapter 11. Complex Model Construction
 Geometric Modeling 91.580.201 Mortenson Chapter 11 Complex Model Construction Topics Topology of Models Connectivity and other intrinsic properties Graph-Based Models Emphasize topological structure Boolean
Geometric Modeling 91.580.201 Mortenson Chapter 11 Complex Model Construction Topics Topology of Models Connectivity and other intrinsic properties Graph-Based Models Emphasize topological structure Boolean
3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College
![3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College](/thumbs/75/72944672.jpg "3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College") 3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull in 3D The problem: Given a set P of points in 3D, compute their convex hull convex polyhedron 2D 3D polygon
3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull in 3D The problem: Given a set P of points in 3D, compute their convex hull convex polyhedron 2D 3D polygon
Non-extendible finite polycycles
 Izvestiya: Mathematics 70:3 1 18 Izvestiya RAN : Ser. Mat. 70:3 3 22 c 2006 RAS(DoM) and LMS DOI 10.1070/IM2006v170n01ABEH002301 Non-extendible finite polycycles M. Deza, S. V. Shpectorov, M. I. Shtogrin
Izvestiya: Mathematics 70:3 1 18 Izvestiya RAN : Ser. Mat. 70:3 3 22 c 2006 RAS(DoM) and LMS DOI 10.1070/IM2006v170n01ABEH002301 Non-extendible finite polycycles M. Deza, S. V. Shpectorov, M. I. Shtogrin
Advanced Algorithms Computational Geometry Prof. Karen Daniels. Spring, 2010
 UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Spring, 2010 Lecture 3 O Rourke Chapter 3: 2D Convex Hulls Thursday, 2/18/10 Chapter 3 2D Convex Hulls
UMass Lowell Computer Science 91.504 Advanced Algorithms Computational Geometry Prof. Karen Daniels Spring, 2010 Lecture 3 O Rourke Chapter 3: 2D Convex Hulls Thursday, 2/18/10 Chapter 3 2D Convex Hulls
THE DNA INEQUALITY POWER ROUND
 THE DNA INEQUALITY POWER ROUND Instructions Write/draw all solutions neatly, with at most one question per page, clearly numbered. Turn in the solutions in numerical order, with your team name at the upper
THE DNA INEQUALITY POWER ROUND Instructions Write/draw all solutions neatly, with at most one question per page, clearly numbered. Turn in the solutions in numerical order, with your team name at the upper
CS 532: 3D Computer Vision 14 th Set of Notes
 1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
1 CS 532: 3D Computer Vision 14 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Triangulating
Planar Graphs and Surfaces. Graphs 2 1/58
 Planar Graphs and Surfaces Graphs 2 1/58 Last time we discussed the Four Color Theorem, which says that any map can be colored with at most 4 colors and not have two regions that share a border having
Planar Graphs and Surfaces Graphs 2 1/58 Last time we discussed the Four Color Theorem, which says that any map can be colored with at most 4 colors and not have two regions that share a border having
TWO CONTRIBUTIONS OF EULER
 TWO CONTRIBUTIONS OF EULER SIEMION FAJTLOWICZ. MATH 4315 Eulerian Tours. Although some mathematical problems which now can be thought of as graph-theoretical, go back to the times of Euclid, the invention
TWO CONTRIBUTIONS OF EULER SIEMION FAJTLOWICZ. MATH 4315 Eulerian Tours. Although some mathematical problems which now can be thought of as graph-theoretical, go back to the times of Euclid, the invention
1 The Platonic Solids
 1 The We take the celebration of Dodecahedron Day as an opportunity embark on a discussion of perhaps the best-known and most celebrated of all polyhedra the Platonic solids. Before doing so, however,
1 The We take the celebration of Dodecahedron Day as an opportunity embark on a discussion of perhaps the best-known and most celebrated of all polyhedra the Platonic solids. Before doing so, however,
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 24 Solid Modelling
 Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 24 Solid Modelling Welcome to the lectures on computer graphics. We have
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 24 Solid Modelling Welcome to the lectures on computer graphics. We have
Euler s Theorem. Brett Chenoweth. February 26, 2013
 Euler s Theorem Brett Chenoweth February 26, 2013 1 Introduction This summer I have spent six weeks of my holidays working on a research project funded by the AMSI. The title of my project was Euler s
Euler s Theorem Brett Chenoweth February 26, 2013 1 Introduction This summer I have spent six weeks of my holidays working on a research project funded by the AMSI. The title of my project was Euler s
Computational Geometry
 Casting a polyhedron CAD/CAM systems CAD/CAM systems allow you to design objects and test how they can be constructed Many objects are constructed used a mold Casting Casting A general question: Given
Casting a polyhedron CAD/CAM systems CAD/CAM systems allow you to design objects and test how they can be constructed Many objects are constructed used a mold Casting Casting A general question: Given
Euler's formula and Platonic solids
 University of Washington Euler's formula and Platonic solids Name: David Clark, Kelsey Kyllo, Kurt Maugerle, Yue Yuan Zhang Course Number: Math 445 Professor: Julia Pevtsova Date: 2013/06/03 Table of Contents:
University of Washington Euler's formula and Platonic solids Name: David Clark, Kelsey Kyllo, Kurt Maugerle, Yue Yuan Zhang Course Number: Math 445 Professor: Julia Pevtsova Date: 2013/06/03 Table of Contents:
CS4733 Class Notes. 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles
 CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
Triangles and Squares David Eppstein, ICS Theory Group, April 20, 2001
 Triangles and Squares David Eppstein, ICS Theory Group, April 20, 2001 Which unit-side-length convex polygons can be formed by packing together unit squares and unit equilateral triangles? For instance
Triangles and Squares David Eppstein, ICS Theory Group, April 20, 2001 Which unit-side-length convex polygons can be formed by packing together unit squares and unit equilateral triangles? For instance
One simple example is that of a cube. Each face is a square (=regular quadrilateral) and each vertex is connected to exactly three squares.
 and each vertex is connected to exactly three squares.") Berkeley Math Circle Intermediate I, 1/23, 1/20, 2/6 Presenter: Elysée Wilson-Egolf Topic: Polygons, Polyhedra, Polytope Series Part 1 Polygon Angle Formula Let s start simple. How do we find the sum of
Berkeley Math Circle Intermediate I, 1/23, 1/20, 2/6 Presenter: Elysée Wilson-Egolf Topic: Polygons, Polyhedra, Polytope Series Part 1 Polygon Angle Formula Let s start simple. How do we find the sum of
Math 366 Lecture Notes Section 11.4 Geometry in Three Dimensions
 Math 366 Lecture Notes Section 11.4 Geometry in Three Dimensions Simple Closed Surfaces A simple closed surface has exactly one interior, no holes, and is hollow. A sphere is the set of all points at a
Math 366 Lecture Notes Section 11.4 Geometry in Three Dimensions Simple Closed Surfaces A simple closed surface has exactly one interior, no holes, and is hollow. A sphere is the set of all points at a
Lecture 3: Art Gallery Problems and Polygon Triangulation
 EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
EECS 396/496: Computational Geometry Fall 2017 Lecture 3: Art Gallery Problems and Polygon Triangulation Lecturer: Huck Bennett In this lecture, we study the problem of guarding an art gallery (specified
Chapter 12 and 11.1 Planar graphs, regular polyhedra, and graph colorings
 Chapter 12 and 11.1 Planar graphs, regular polyhedra, and graph colorings Prof. Tesler Math 184A Fall 2017 Prof. Tesler Ch. 12: Planar Graphs Math 184A / Fall 2017 1 / 45 12.1 12.2. Planar graphs Definition
Chapter 12 and 11.1 Planar graphs, regular polyhedra, and graph colorings Prof. Tesler Math 184A Fall 2017 Prof. Tesler Ch. 12: Planar Graphs Math 184A / Fall 2017 1 / 45 12.1 12.2. Planar graphs Definition
Major Facilities for Mathematical Thinking and Understanding. (2) Vision, spatial sense and kinesthetic (motion) sense.
 Vision, spatial sense and kinesthetic (motion) sense.") Major Facilities for Mathematical Thinking and Understanding. (2) Vision, spatial sense and kinesthetic (motion) sense. Left brain Right brain Hear what you see. See what you hear. Mobius Strip http://www.metacafe.com/watch/331665/
Major Facilities for Mathematical Thinking and Understanding. (2) Vision, spatial sense and kinesthetic (motion) sense. Left brain Right brain Hear what you see. See what you hear. Mobius Strip http://www.metacafe.com/watch/331665/
Polygon Partitioning. Lecture03
 1 Polygon Partitioning Lecture03 2 History of Triangulation Algorithms 3 Outline Monotone polygon Triangulation of monotone polygon Trapezoidal decomposition Decomposition in monotone mountain Convex decomposition
1 Polygon Partitioning Lecture03 2 History of Triangulation Algorithms 3 Outline Monotone polygon Triangulation of monotone polygon Trapezoidal decomposition Decomposition in monotone mountain Convex decomposition
Topology and Boundary Representation. The ACIS boundary representation (B-rep) of a model is a hierarchical decomposition of the model s topology:
 of a model is a hierarchical decomposition of the model s topology:") Chapter 6. Model Topology Topology refers to the spatial relationships between the various entities in a model. Topology describes how geometric entities are connected (connectivity). On its own, topology
Chapter 6. Model Topology Topology refers to the spatial relationships between the various entities in a model. Topology describes how geometric entities are connected (connectivity). On its own, topology
Example: The following is an example of a polyhedron. Fill the blanks with the appropriate answer. Vertices:
 11.1: Space Figures and Cross Sections Polyhedron: solid that is bounded by polygons Faces: polygons that enclose a polyhedron Edge: line segment that faces meet and form Vertex: point or corner where
11.1: Space Figures and Cross Sections Polyhedron: solid that is bounded by polygons Faces: polygons that enclose a polyhedron Edge: line segment that faces meet and form Vertex: point or corner where
Flavor of Computational Geometry. Voronoi Diagrams. Shireen Y. Elhabian Aly A. Farag University of Louisville
 Flavor of Computational Geometry Voronoi Diagrams Shireen Y. Elhabian Aly A. Farag University of Louisville March 2010 Pepperoni Sparse Pizzas Olive Sparse Pizzas Just Two Pepperonis A person gets the
Flavor of Computational Geometry Voronoi Diagrams Shireen Y. Elhabian Aly A. Farag University of Louisville March 2010 Pepperoni Sparse Pizzas Olive Sparse Pizzas Just Two Pepperonis A person gets the
[8] that this cannot happen on the projective plane (cf. also [2]) and the results of Robertson, Seymour, and Thomas [5] on linkless embeddings of gra
![[8] that this cannot happen on the projective plane (cf. also [2]) and the results of Robertson, Seymour, and Thomas [5] on linkless embeddings of gra](/thumbs/85/93035794.jpg "[8] that this cannot happen on the projective plane (cf. also [2]) and the results of Robertson, Seymour, and Thomas [5] on linkless embeddings of gra") Apex graphs with embeddings of face-width three Bojan Mohar Department of Mathematics University of Ljubljana Jadranska 19, 61111 Ljubljana Slovenia bojan.mohar@uni-lj.si Abstract Aa apex graph is a graph
Apex graphs with embeddings of face-width three Bojan Mohar Department of Mathematics University of Ljubljana Jadranska 19, 61111 Ljubljana Slovenia bojan.mohar@uni-lj.si Abstract Aa apex graph is a graph
Chapter 11 Part 2. Measurement of Figures and Solids
 Chapter 11 Part 2 Measurement of Figures and Solids 11.5 Explore Solids Objective: Identify Solids Essential Question: When is a solid a polyhedron? Using properties of polyhedra A is a solid that is bounded
Chapter 11 Part 2 Measurement of Figures and Solids 11.5 Explore Solids Objective: Identify Solids Essential Question: When is a solid a polyhedron? Using properties of polyhedra A is a solid that is bounded
A GENTLE INTRODUCTION TO THE BASIC CONCEPTS OF SHAPE SPACE AND SHAPE STATISTICS
 A GENTLE INTRODUCTION TO THE BASIC CONCEPTS OF SHAPE SPACE AND SHAPE STATISTICS HEMANT D. TAGARE. Introduction. Shape is a prominent visual feature in many images. Unfortunately, the mathematical theory
A GENTLE INTRODUCTION TO THE BASIC CONCEPTS OF SHAPE SPACE AND SHAPE STATISTICS HEMANT D. TAGARE. Introduction. Shape is a prominent visual feature in many images. Unfortunately, the mathematical theory
1/60. Geometric Algorithms. Lecture 1: Introduction. Convex Hulls
 1/60 Geometric Algorithms Lecture 1: Introduction Convex Hulls Geometric algorithms scope 2/60 Geometry algorithms (practice): Study of geometric problems that arise in various applications and how algorithms
1/60 Geometric Algorithms Lecture 1: Introduction Convex Hulls Geometric algorithms scope 2/60 Geometry algorithms (practice): Study of geometric problems that arise in various applications and how algorithms
Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College
![Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College](/thumbs/86/93358306.jpg "Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College") Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull Given a set P of points in 2D, their convex hull is the smallest convex polygon that contains all points
Planar convex hulls (I) Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hull Given a set P of points in 2D, their convex hull is the smallest convex polygon that contains all points
EULER S FORMULA AND THE FIVE COLOR THEOREM
 EULER S FORMULA AND THE FIVE COLOR THEOREM MIN JAE SONG Abstract. In this paper, we will define the necessary concepts to formulate map coloring problems. Then, we will prove Euler s formula and apply
EULER S FORMULA AND THE FIVE COLOR THEOREM MIN JAE SONG Abstract. In this paper, we will define the necessary concepts to formulate map coloring problems. Then, we will prove Euler s formula and apply
Edge Guards for Polyhedra in Three-Space
 Edge Guards for Polyhedra in Three-Space Javier Cano Csaba D. Tóth Jorge Urrutia Abstract It is shown that every polyhedron in R with m edges can be guarded with at most 27 2m The bound improves to 5 6
Edge Guards for Polyhedra in Three-Space Javier Cano Csaba D. Tóth Jorge Urrutia Abstract It is shown that every polyhedron in R with m edges can be guarded with at most 27 2m The bound improves to 5 6
Figure 2.1: An example of a convex set and a nonconvex one.
 Convex Hulls 2.1 Definitions 2 Convexity is the key to understanding and simplifying geometry, and the convex hull plays a role in geometry akin to the sorted order for a collection of numbers. So what
Convex Hulls 2.1 Definitions 2 Convexity is the key to understanding and simplifying geometry, and the convex hull plays a role in geometry akin to the sorted order for a collection of numbers. So what
Curvature Berkeley Math Circle January 08, 2013
 Curvature Berkeley Math Circle January 08, 2013 Linda Green linda@marinmathcircle.org Parts of this handout are taken from Geometry and the Imagination by John Conway, Peter Doyle, Jane Gilman, and Bill
Curvature Berkeley Math Circle January 08, 2013 Linda Green linda@marinmathcircle.org Parts of this handout are taken from Geometry and the Imagination by John Conway, Peter Doyle, Jane Gilman, and Bill
MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces
 MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces David L. Finn Today, we continue our discussion of subdivision surfaces, by first looking in more detail at the midpoint method and
MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces David L. Finn Today, we continue our discussion of subdivision surfaces, by first looking in more detail at the midpoint method and
Math 210 Manifold III, Spring 2018 Euler Characteristics of Surfaces Hirotaka Tamanoi
 Math 210 Manifold III, Spring 2018 Euler Characteristics of Surfaces Hirotaka Tamanoi 1. Euler Characteristic of Surfaces Leonhard Euler noticed that the number v of vertices, the number e of edges and
Math 210 Manifold III, Spring 2018 Euler Characteristics of Surfaces Hirotaka Tamanoi 1. Euler Characteristic of Surfaces Leonhard Euler noticed that the number v of vertices, the number e of edges and
COMPUTATIONAL GEOMETRY
 Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
Thursday, September 20, 2007 (Ming C. Lin) Review on Computational Geometry & Collision Detection for Convex Polytopes COMPUTATIONAL GEOMETRY (Refer to O'Rourke's and Dutch textbook ) 1. Extreme Points
11.4 Three-Dimensional Figures
 11. Three-Dimensional Figures Essential Question What is the relationship between the numbers of vertices V, edges E, and faces F of a polyhedron? A polyhedron is a solid that is bounded by polygons, called
11. Three-Dimensional Figures Essential Question What is the relationship between the numbers of vertices V, edges E, and faces F of a polyhedron? A polyhedron is a solid that is bounded by polygons, called
Math 311. Polyhedra Name: A Candel CSUN Math
 1. A polygon may be described as a finite region of the plane enclosed by a finite number of segments, arranged in such a way that (a) exactly two segments meets at every vertex, and (b) it is possible
1. A polygon may be described as a finite region of the plane enclosed by a finite number of segments, arranged in such a way that (a) exactly two segments meets at every vertex, and (b) it is possible
Pebble Sets in Convex Polygons
 2 1 Pebble Sets in Convex Polygons Kevin Iga, Randall Maddox June 15, 2005 Abstract Lukács and András posed the problem of showing the existence of a set of n 2 points in the interior of a convex n-gon
2 1 Pebble Sets in Convex Polygons Kevin Iga, Randall Maddox June 15, 2005 Abstract Lukács and András posed the problem of showing the existence of a set of n 2 points in the interior of a convex n-gon
25. How would you make the octahedral die shown below?
 304450_ch_08_enqxd 12/6/06 1:39 PM Page 577 Chapter Summary 577 draw others you will not necessarily need all of them. Describe your method, other than random trial and error. How confident are you that
304450_ch_08_enqxd 12/6/06 1:39 PM Page 577 Chapter Summary 577 draw others you will not necessarily need all of them. Describe your method, other than random trial and error. How confident are you that
The following is a summary, hand-waving certain things which actually should be proven.
 1 Basics of Planar Graphs The following is a summary, hand-waving certain things which actually should be proven. 1.1 Plane Graphs A plane graph is a graph embedded in the plane such that no pair of lines
1 Basics of Planar Graphs The following is a summary, hand-waving certain things which actually should be proven. 1.1 Plane Graphs A plane graph is a graph embedded in the plane such that no pair of lines
Grade VIII. Mathematics Geometry Notes. #GrowWithGreen
 Grade VIII Mathematics Geometry Notes #GrowWithGreen Polygons can be classified according to their number of sides (or vertices). The sum of all the interior angles of an n -sided polygon is given by,
Grade VIII Mathematics Geometry Notes #GrowWithGreen Polygons can be classified according to their number of sides (or vertices). The sum of all the interior angles of an n -sided polygon is given by,
Computational Geometry. Algorithm Design (10) Computational Geometry. Convex Hull. Areas in Computational Geometry
 Computational Geometry. Convex Hull. Areas in Computational Geometry") Computational Geometry Algorithm Design (10) Computational Geometry Graduate School of Engineering Takashi Chikayama Algorithms formulated as geometry problems Broad application areas Computer Graphics,
Computational Geometry Algorithm Design (10) Computational Geometry Graduate School of Engineering Takashi Chikayama Algorithms formulated as geometry problems Broad application areas Computer Graphics,
Glossary of dictionary terms in the AP geometry units
 Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
The Geometry of Carpentry and Joinery
 The Geometry of Carpentry and Joinery Pat Morin and Jason Morrison School of Computer Science, Carleton University, 115 Colonel By Drive Ottawa, Ontario, CANADA K1S 5B6 Abstract In this paper we propose
The Geometry of Carpentry and Joinery Pat Morin and Jason Morrison School of Computer Science, Carleton University, 115 Colonel By Drive Ottawa, Ontario, CANADA K1S 5B6 Abstract In this paper we propose
Chapter 4 Concepts from Geometry
 Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
Computational Geometry Overview from Cormen, et al.
 UMass Lowell Computer Science 91.503 Graduate Algorithms Prof. Karen Daniels Spring, 2014 Computational Geometry Overview from Cormen, et al. Chapter 33 (with additional material from other sources) 1
UMass Lowell Computer Science 91.503 Graduate Algorithms Prof. Karen Daniels Spring, 2014 Computational Geometry Overview from Cormen, et al. Chapter 33 (with additional material from other sources) 1
Face Width and Graph Embeddings of face-width 2 and 3
 Face Width and Graph Embeddings of face-width 2 and 3 Instructor: Robin Thomas Scribe: Amanda Pascoe 3/12/07 and 3/14/07 1 Representativity Recall the following: Definition 2. Let Σ be a surface, G a graph,
Face Width and Graph Embeddings of face-width 2 and 3 Instructor: Robin Thomas Scribe: Amanda Pascoe 3/12/07 and 3/14/07 1 Representativity Recall the following: Definition 2. Let Σ be a surface, G a graph,
Linear Complexity Hexahedral Mesh Generation
 Linear Complexity Hexahedral Mesh Generation David Eppstein Department of Information and Computer Science University of California, Irvine, CA 92717 http://www.ics.uci.edu/ eppstein/ Tech. Report 95-51
Linear Complexity Hexahedral Mesh Generation David Eppstein Department of Information and Computer Science University of California, Irvine, CA 92717 http://www.ics.uci.edu/ eppstein/ Tech. Report 95-51
Week 9: Planar and non-planar graphs. 7 and 9 November, 2018
 (1/27) MA284 : Discrete Mathematics Week 9: Planar and non-planar graphs http://www.maths.nuigalway.ie/ niall/ma284/ 7 and 9 November, 2018 1 Planar graphs and Euler s formula 2 Non-planar graphs K 5 K
(1/27) MA284 : Discrete Mathematics Week 9: Planar and non-planar graphs http://www.maths.nuigalway.ie/ niall/ma284/ 7 and 9 November, 2018 1 Planar graphs and Euler s formula 2 Non-planar graphs K 5 K
Lecture 7: Computational Geometry
 Lecture 7: Computational Geometry CS 491 CAP Uttam Thakore Friday, October 7 th, 2016 Credit for many of the slides on solving geometry problems goes to the Stanford CS 97SI course lecture on computational
Lecture 7: Computational Geometry CS 491 CAP Uttam Thakore Friday, October 7 th, 2016 Credit for many of the slides on solving geometry problems goes to the Stanford CS 97SI course lecture on computational
Decomposition of the figure-8 knot
 CHAPTER 1 Decomposition of the figure-8 knot This book is an introduction to knots, links, and their geometry. Before we begin, we need to define carefully exactly what we mean by knots and links, and
CHAPTER 1 Decomposition of the figure-8 knot This book is an introduction to knots, links, and their geometry. Before we begin, we need to define carefully exactly what we mean by knots and links, and
Triangulation and Convex Hull. 8th November 2018
 Triangulation and Convex Hull 8th November 2018 Agenda 1. Triangulation. No book, the slides are the curriculum 2. Finding the convex hull. Textbook, 8.6.2 2 Triangulation and terrain models Here we have
Triangulation and Convex Hull 8th November 2018 Agenda 1. Triangulation. No book, the slides are the curriculum 2. Finding the convex hull. Textbook, 8.6.2 2 Triangulation and terrain models Here we have
Researches on polyhedra, Part I A.-L. Cauchy
 Researches on polyhedra, Part I A.-L. Cauchy Translated into English by Guy Inchbald, 2006 from the original: A.-L. Cauchy, Recherches sur les polyèdres. Première partie, Journal de l École Polytechnique,
Researches on polyhedra, Part I A.-L. Cauchy Translated into English by Guy Inchbald, 2006 from the original: A.-L. Cauchy, Recherches sur les polyèdres. Première partie, Journal de l École Polytechnique,
Manifolds. Chapter X. 44. Locally Euclidean Spaces
 Chapter X Manifolds 44. Locally Euclidean Spaces 44 1. Definition of Locally Euclidean Space Let n be a non-negative integer. A topological space X is called a locally Euclidean space of dimension n if
Chapter X Manifolds 44. Locally Euclidean Spaces 44 1. Definition of Locally Euclidean Space Let n be a non-negative integer. A topological space X is called a locally Euclidean space of dimension n if
Mathematics Curriculum
 6 G R A D E Mathematics Curriculum GRADE 6 5 Table of Contents 1... 1 Topic A: Area of Triangles, Quadrilaterals, and Polygons (6.G.A.1)... 11 Lesson 1: The Area of Parallelograms Through Rectangle Facts...
6 G R A D E Mathematics Curriculum GRADE 6 5 Table of Contents 1... 1 Topic A: Area of Triangles, Quadrilaterals, and Polygons (6.G.A.1)... 11 Lesson 1: The Area of Parallelograms Through Rectangle Facts...
2 Geometry Solutions
 2 Geometry Solutions jacques@ucsd.edu Here is give problems and solutions in increasing order of difficulty. 2.1 Easier problems Problem 1. What is the minimum number of hyperplanar slices to make a d-dimensional
2 Geometry Solutions jacques@ucsd.edu Here is give problems and solutions in increasing order of difficulty. 2.1 Easier problems Problem 1. What is the minimum number of hyperplanar slices to make a d-dimensional
INTRODUCTION TO 3-MANIFOLDS
 INTRODUCTION TO 3-MANIFOLDS NIK AKSAMIT As we know, a topological n-manifold X is a Hausdorff space such that every point contained in it has a neighborhood (is contained in an open set) homeomorphic to
INTRODUCTION TO 3-MANIFOLDS NIK AKSAMIT As we know, a topological n-manifold X is a Hausdorff space such that every point contained in it has a neighborhood (is contained in an open set) homeomorphic to
3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College
![3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College](/thumbs/90/102029124.jpg "3D convex hulls. Computational Geometry [csci 3250] Laura Toma Bowdoin College") 3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hulls The problem: Given a set P of points, compute their convex hull 2D 3D 2D 3D polygon polyhedron Polyhedron region
3D convex hulls Computational Geometry [csci 3250] Laura Toma Bowdoin College Convex Hulls The problem: Given a set P of points, compute their convex hull 2D 3D 2D 3D polygon polyhedron Polyhedron region
CSE 5311 Notes 13: Computational Geometry
 CSE 5311 Notes 13: Computational Geometry (Last updated 4/17/17 4:39 PM) SMALLEST ENCLOSING DISK See section 4.7 of de Berg ( http://dx.doi.org.ezproxy.uta.edu/10.1007/978-3-540-77974-2 ) Algorithm MINIDISC(P)
CSE 5311 Notes 13: Computational Geometry (Last updated 4/17/17 4:39 PM) SMALLEST ENCLOSING DISK See section 4.7 of de Berg ( http://dx.doi.org.ezproxy.uta.edu/10.1007/978-3-540-77974-2 ) Algorithm MINIDISC(P)
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Geometric Algorithms in Three Dimensions Tutorial. FSP Seminar, Strobl,
 Geometric Algorithms in Three Dimensions Tutorial FSP Seminar, Strobl, 22.06.2006 Why Algorithms in Three and Higher Dimensions Which algorithms (convex hulls, triangulations etc.) can be generalized to
Geometric Algorithms in Three Dimensions Tutorial FSP Seminar, Strobl, 22.06.2006 Why Algorithms in Three and Higher Dimensions Which algorithms (convex hulls, triangulations etc.) can be generalized to
Assignment 8; Due Friday, March 10
 Assignment 8; Due Friday, March 10 The previous two exercise sets covered lots of material. We ll end the course with two short assignments. This one asks you to visualize an important family of three
Assignment 8; Due Friday, March 10 The previous two exercise sets covered lots of material. We ll end the course with two short assignments. This one asks you to visualize an important family of three
CLASSIFICATION OF SURFACES
 CLASSIFICATION OF SURFACES JUSTIN HUANG Abstract. We will classify compact, connected surfaces into three classes: the sphere, the connected sum of tori, and the connected sum of projective planes. Contents
CLASSIFICATION OF SURFACES JUSTIN HUANG Abstract. We will classify compact, connected surfaces into three classes: the sphere, the connected sum of tori, and the connected sum of projective planes. Contents
TOURNAMENT OF THE TOWNS, Glossary
 TOURNAMENT OF THE TOWNS, 2003 2004 Glossary Absolute value The size of a number with its + or sign removed. The absolute value of 3.2 is 3.2, the absolute value of +4.6 is 4.6. We write this: 3.2 = 3.2
TOURNAMENT OF THE TOWNS, 2003 2004 Glossary Absolute value The size of a number with its + or sign removed. The absolute value of 3.2 is 3.2, the absolute value of +4.6 is 4.6. We write this: 3.2 = 3.2
751 Problem Set I JWR. Due Sep 28, 2004
 751 Problem Set I JWR Due Sep 28, 2004 Exercise 1. For any space X define an equivalence relation by x y iff here is a path γ : I X with γ(0) = x and γ(1) = y. The equivalence classes are called the path
751 Problem Set I JWR Due Sep 28, 2004 Exercise 1. For any space X define an equivalence relation by x y iff here is a path γ : I X with γ(0) = x and γ(1) = y. The equivalence classes are called the path
Restricted-Orientation Convexity in Higher-Dimensional Spaces
 Restricted-Orientation Convexity in Higher-Dimensional Spaces ABSTRACT Eugene Fink Derick Wood University of Waterloo, Waterloo, Ont, Canada N2L3G1 {efink, dwood}@violetwaterlooedu A restricted-oriented
Restricted-Orientation Convexity in Higher-Dimensional Spaces ABSTRACT Eugene Fink Derick Wood University of Waterloo, Waterloo, Ont, Canada N2L3G1 {efink, dwood}@violetwaterlooedu A restricted-oriented
3.D. The Platonic solids
 3.D. The Platonic solids The purpose of this addendum to the course notes is to provide more information about regular solid figures, which played an important role in Greek mathematics and philosophy.
3.D. The Platonic solids The purpose of this addendum to the course notes is to provide more information about regular solid figures, which played an important role in Greek mathematics and philosophy.
Pacific Journal of Mathematics
 Pacific Journal of Mathematics SIMPLIFYING TRIANGULATIONS OF S 3 Aleksandar Mijatović Volume 208 No. 2 February 2003 PACIFIC JOURNAL OF MATHEMATICS Vol. 208, No. 2, 2003 SIMPLIFYING TRIANGULATIONS OF S
Pacific Journal of Mathematics SIMPLIFYING TRIANGULATIONS OF S 3 Aleksandar Mijatović Volume 208 No. 2 February 2003 PACIFIC JOURNAL OF MATHEMATICS Vol. 208, No. 2, 2003 SIMPLIFYING TRIANGULATIONS OF S
Vertex Configurations and Their Relationship on Orthogonal Pseudo-Polyhedra Jefri Marzal, Hong Xie, and Chun Che Fung
 Vertex Configurations and Their Relationship on Orthogonal Pseudo-Polyhedra Jefri Marzal, Hong Xie, and Chun Che Fung Abstract Vertex configuration for a vertex in an orthogonal pseudo-polyhedron is an
Vertex Configurations and Their Relationship on Orthogonal Pseudo-Polyhedra Jefri Marzal, Hong Xie, and Chun Che Fung Abstract Vertex configuration for a vertex in an orthogonal pseudo-polyhedron is an
CS195H Homework 5. Due:March 12th, 2015
 CS195H Homework 5 Due:March 12th, 2015 As usual, please work in pairs. Math Stuff For us, a surface is a finite collection of triangles (or other polygons, but let s stick with triangles for now) with
CS195H Homework 5 Due:March 12th, 2015 As usual, please work in pairs. Math Stuff For us, a surface is a finite collection of triangles (or other polygons, but let s stick with triangles for now) with
7. The Gauss-Bonnet theorem
 7. The Gauss-Bonnet theorem 7.1 Hyperbolic polygons In Euclidean geometry, an n-sided polygon is a subset of the Euclidean plane bounded by n straight lines. Thus the edges of a Euclidean polygon are formed
7. The Gauss-Bonnet theorem 7.1 Hyperbolic polygons In Euclidean geometry, an n-sided polygon is a subset of the Euclidean plane bounded by n straight lines. Thus the edges of a Euclidean polygon are formed
Three applications of Euler s formula. Chapter 10
 Three applications of Euler s formula Chapter 10 A graph is planar if it can be drawn in the plane R without crossing edges (or, equivalently, on the -dimensional sphere S ). We talk of a plane graph if
Three applications of Euler s formula Chapter 10 A graph is planar if it can be drawn in the plane R without crossing edges (or, equivalently, on the -dimensional sphere S ). We talk of a plane graph if
Handles. The justification: For a 0 genus triangle mesh we can write the formula as follows:
 Handles A handle in a 3d mesh is a through hole. The number of handles can be extracted of the genus of the 3d mesh. Genus is the number of times we can cut 2k edges without disconnecting the 3d mesh.
Handles A handle in a 3d mesh is a through hole. The number of handles can be extracted of the genus of the 3d mesh. Genus is the number of times we can cut 2k edges without disconnecting the 3d mesh.
REGULAR POLYTOPES REALIZED OVER Q
 REGULAR POLYTOPES REALIZED OVER Q TREVOR HYDE A regular polytope is a d-dimensional generalization of a regular polygon and a Platonic solid. Roughly, they are convex geometric objects with maximal rotational
REGULAR POLYTOPES REALIZED OVER Q TREVOR HYDE A regular polytope is a d-dimensional generalization of a regular polygon and a Platonic solid. Roughly, they are convex geometric objects with maximal rotational
7th Bay Area Mathematical Olympiad
 7th Bay Area Mathematical Olympiad February 22, 2005 Problems and Solutions 1 An integer is called formidable if it can be written as a sum of distinct powers of 4, and successful if it can be written
7th Bay Area Mathematical Olympiad February 22, 2005 Problems and Solutions 1 An integer is called formidable if it can be written as a sum of distinct powers of 4, and successful if it can be written
A Study of the Rigidity of Regular Polytopes
 A Study of the Rigidity of Regular Polytopes A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science in the Graduate School of The Ohio State University By Helene
A Study of the Rigidity of Regular Polytopes A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science in the Graduate School of The Ohio State University By Helene
Basics of Combinatorial Topology
 Chapter 7 Basics of Combinatorial Topology 7.1 Simplicial and Polyhedral Complexes In order to study and manipulate complex shapes it is convenient to discretize these shapes and to view them as the union
Chapter 7 Basics of Combinatorial Topology 7.1 Simplicial and Polyhedral Complexes In order to study and manipulate complex shapes it is convenient to discretize these shapes and to view them as the union
Computer Aided Engineering Design Prof. Anupam Saxena Department of Mechanical Engineering Indian Institute of Technology, Kanpur.
 (Refer Slide Time: 00:28) Computer Aided Engineering Design Prof. Anupam Saxena Department of Mechanical Engineering Indian Institute of Technology, Kanpur Lecture - 6 Hello, this is lecture number 6 of
(Refer Slide Time: 00:28) Computer Aided Engineering Design Prof. Anupam Saxena Department of Mechanical Engineering Indian Institute of Technology, Kanpur Lecture - 6 Hello, this is lecture number 6 of
Jordan Curves. A curve is a subset of IR 2 of the form
 Jordan Curves A curve is a subset of IR 2 of the form α = {γ(x) : x [0,1]}, where γ : [0,1] IR 2 is a continuous mapping from the closed interval [0,1] to the plane. γ(0) and γ(1) are called the endpoints
Jordan Curves A curve is a subset of IR 2 of the form α = {γ(x) : x [0,1]}, where γ : [0,1] IR 2 is a continuous mapping from the closed interval [0,1] to the plane. γ(0) and γ(1) are called the endpoints
Week 9: Planar and non-planar graphs. 1st and 3rd of November, 2017
 (1/26) MA284 : Discrete Mathematics Week 9: Planar and non-planar graphs http://www.maths.nuigalway.ie/~niall/ma284/ 1st and 3rd of November, 2017 1 Recall... planar graphs and Euler s formula 2 Non-planar
(1/26) MA284 : Discrete Mathematics Week 9: Planar and non-planar graphs http://www.maths.nuigalway.ie/~niall/ma284/ 1st and 3rd of November, 2017 1 Recall... planar graphs and Euler s formula 2 Non-planar
FACES OF CONVEX SETS
 FACES OF CONVEX SETS VERA ROSHCHINA Abstract. We remind the basic definitions of faces of convex sets and their basic properties. For more details see the classic references [1, 2] and [4] for polytopes.
FACES OF CONVEX SETS VERA ROSHCHINA Abstract. We remind the basic definitions of faces of convex sets and their basic properties. For more details see the classic references [1, 2] and [4] for polytopes.
The Geodesic Integral on Medial Graphs
 The Geodesic Integral on Medial Graphs Kolya Malkin August 013 We define the geodesic integral defined on paths in the duals of medial graphs on surfaces and use it to study lens elimination and connection
The Geodesic Integral on Medial Graphs Kolya Malkin August 013 We define the geodesic integral defined on paths in the duals of medial graphs on surfaces and use it to study lens elimination and connection
Jordan Curves. A curve is a subset of IR 2 of the form
 Jordan Curves A curve is a subset of IR 2 of the form α = {γ(x) : x [0, 1]}, where γ : [0, 1] IR 2 is a continuous mapping from the closed interval [0, 1] to the plane. γ(0) and γ(1) are called the endpoints
Jordan Curves A curve is a subset of IR 2 of the form α = {γ(x) : x [0, 1]}, where γ : [0, 1] IR 2 is a continuous mapping from the closed interval [0, 1] to the plane. γ(0) and γ(1) are called the endpoints
Computational Geometry Algorithmische Geometrie
 Algorithmische Geometrie Panos Giannopoulos Wolfgang Mulzer Lena Schlipf AG TI SS 2013 !! Register in Campus Management!! Outline What you need to know (before taking this course) What is the course about?
Algorithmische Geometrie Panos Giannopoulos Wolfgang Mulzer Lena Schlipf AG TI SS 2013 !! Register in Campus Management!! Outline What you need to know (before taking this course) What is the course about?
Computational Geometry. Geometry Cross Product Convex Hull Problem Sweep Line Algorithm
 GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
Bands: A Physical Data Structure to Represent Both Orientable and Non-Orientable 2-Manifold Meshes
 Bands: A Physical Data Structure to Represent Both Orientable and Non-Orientable 2-Manifold Meshes Abstract This paper presents a physical data structure to represent both orientable and non-orientable
Bands: A Physical Data Structure to Represent Both Orientable and Non-Orientable 2-Manifold Meshes Abstract This paper presents a physical data structure to represent both orientable and non-orientable