Methods for Representing and Recognizing 3D objects
|
|
|
- Osborne Gordon
- 6 years ago
- Views:
Transcription


1 Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor



2

3 Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object: Police car, side view, 4-5 m away
4 Object: Building s name; What are the businesses inside? Street or intersection name
5 Scene understanding Navigation Interaction Augmentation Manipulation Visual technology Building Object 1 Image/video Object N - semantic - semantic - geometry - geometry Recognizing objects under arbitrary viewing conditions Recognize their pose







6 Car: frontright training Iron: top-rearleft Minimal supervision


7





8 Single 3D object recognition Edelman et al. 91 Ballard, 81 Ullman & Barsi, 91 Grimson & L.-Perez, 87 Rothwell 92 Lowe, 87 Linderberg, 94 Murase & Nayar 94 Zhang et al 95 Schmid & Mohr, 96 Schiele & Crowley, 96 Lowe, 99 Jacob & Barsi, 99 Rothganger et al., 04 Ferrari et al, 05 Brown & Lowe 05 Snavely et al 06



9 Recognition for Virtual sightseeing NOKIA



10 Object manipulations Robot arm for automatic gas fill up

11 Object manipulations









12 Single view object categorization Leung et al 99 Felzenszwalb & Weber et al. 00 Huttenlocher 03 Ullman et al. 02 Fei-Fei et al. 04 Fergus et al. 03 Leibe et al. 04 Torralba et al. 03 Kumar & Hebert 04 Sivic et al. 05 Shotton et al 05 Grauman et al. 05 Sudderth et al 05 Torralba et al. 05 Lazebnik et al. 06 Todorovic et al. 06 Bosh et al 07 Vedaldi & Soatto 08 Zhu et al 08




13 Security Safe driving photography


14 3D Object Categorization Weber et al. 00 Schneiderman et al. 01 Capel et al 02 Johnson & Herbert 99 Bronstein et al, 03 Ruiz-Correa et al. 03, Funkhouser et al 03 Bart et al 04 Thomas et al. 06 Kushal, et al., 07 Savarese et al, 07, 08 Chiu et al. 07 Hoiem, et al., 07 Yan, et al. 07
15 Overview Single 3D object recognition Single view object categorization 3D object categorization
16 Single 3D object recognition Edelman et al. 91 Ballard, 81 Ullman & Barsi, 91 Grimson & L.-Perez, 87 Rothwell 92 Lowe, 87 Linderberg, 94 Murase & Nayar 94 Zhang et al 95 Schmid & Mohr, 96 Schiele & Crowley, 96 Lowe, 99 Jacob & Barsi, 99 Rothganger et al., 04 Ferrari et al, 05 Brown & Lowe 05 Snavely et al 06
17 Basic scheme -Representation -Features -Descriptors - Model -Model learning -Recognition -Hypothesis generation - Model verification

18 Object representation: Collection of patches in 3D Rothganger et al. 06 x,y,z + h,v + descriptor Courtesy of Rothganger et al

19 Model learning Rothganger et al Build a 3D model: N images of object from N different view points Match key points between consecutive views [ create sample set] Use affine structure from motion to compute 3D location and orientation + camera locations [RANSAC] Find connected components Use bundle adjustment to refine model Upgrade model to Euclidean assuming zero skew and square pixels




20 Affine Structure from Motion Books: Faugeras, 95 Zisserman & Hartley, 00 Ma, Soatto, et al. 05 Affine epipolar geometry between image pairs. Fundamental matrix F imposes: x Fx = 0 and l = Fx


21 Learnt models Rothganger et al Courtesy of Rothganger et al
22 Basic scheme -Representation -Features -Descriptors - Model -Model learning -Recognition [object instance from a single image] - Hypothesis generation - Model verification
23 Recognition [Rothganger et al ] 1. Find matches between model and test image features
24 Recognition [Rothganger et al ] 1. Find matches between model and test image features 2. Generate hypothesis: Compute transformation M from N matches points) 3. Model verification (N=2; affine camera; affine key
25 Recognition [Rothganger et al ] Goal: Estimate (fit) the best M in presence of outliers
26 Line fitting with outliers : I P, such that: O min O Model parameters f (P, ) f ( P, ) T 1 T P P P
 f h ( P, P, ) k P h H P")
27 Fitting homographies for stitching panorama Image h Image k h : I P, k : I P, k h O O k h x x,,, 1 2 min x n h O O k such that: f ( P h, P k, ) f h ( P, P, ) k P h H P k

28 Fitting homographies for stitching panorama
29 RANSAC - Basic philosophy (RANdom SAmple Consensus) : Learning technique to estimate parameters of a model by random sampling of observed data Fischler & Bolles in 81. Data elements are used to vote for one (or multiple) models Robust to outliers and missing data Assumption1: Noise features will not vote consistently for any single model ( few outliers) Assumption2: there are enough features to agree on a good model ( few missing data)
30 RANSAC Sample set = set of points in 2D Algorithm: 1. Select random sample of minimum required size to fit model 2. Compute a putative model from sample set 3. Compute the set of inliers to this model from whole data set Repeat 1-3 until model with the most inliers over all samples is found
31 RANSAC Sample set = set of points in 2D Algorithm: 1. Select random sample of minimum required size to fit model =[2] [?] 2. Compute a putative model from sample set 3. Compute the set of inliers to this model from whole data set Repeat 1-3 until model with the most inliers over all samples is found
32 RANSAC Sample set = set of points in 2D Algorithm: 1. Select random sample of minimum required size to fit model =[2] [?] 2. Compute a putative model from sample set 3. Compute the set of inliers to this model from whole data set Repeat 1-3 until model with the most inliers over all samples is found
33 RANSAC Sample set = set of points in 2D Algorithm: O = Select random sample of minimum required size to fit model =[2] [?] 2. Compute a putative model from sample set 3. Compute the set of inliers to this model from whole data set Repeat 1-3 until model with the most inliers over all samples is found
34 RANSAC (RANdom SAmple Consensus) : Fischler & Bolles in 81. Algorithm: O = 6 1. Select random sample of minimum required size to fit model [?] 2. Compute a putative model from sample set 3. Compute the set of inliers to this model from whole data set Repeat 1-3 until model with the most inliers over all samples is found
35 How many samples? Number of samples N Choose N so that, with probability p, at least one random sample is free from outliers (e.g. p=0.99) (outlier ratio: e ) Initial number of points s Typically minimum number needed to fit the model Distance threshold Choose so probability for inlier is p (e.g. 0.95) Zero-mean Gaussian noise with std. dev. σ: t 2 =3.84σ 2 N log 1 p / log 1 1 e s proportion of outliers e s 5% 10% 20% 25% 30% 40% 50% Source: M. Pollefeys
![Recognition [Rothganger et al. 03 06] 1. Find matches between model and test image features 2.](/docs-images/77/75526164/images/36-1.jpg "Generate hypothesis: Compute transformation M from N matches points) 3.")
36 Recognition [Rothganger et al ] 1. Find matches between model and test image features 2. Generate hypothesis: Compute transformation M from N matches points) 3. Model verification (N=2; affine camera; affine key

37 Object to recognize Initial matches based on appearance Matches after pose verification Recovered pose Courtesy of Rothganger et al

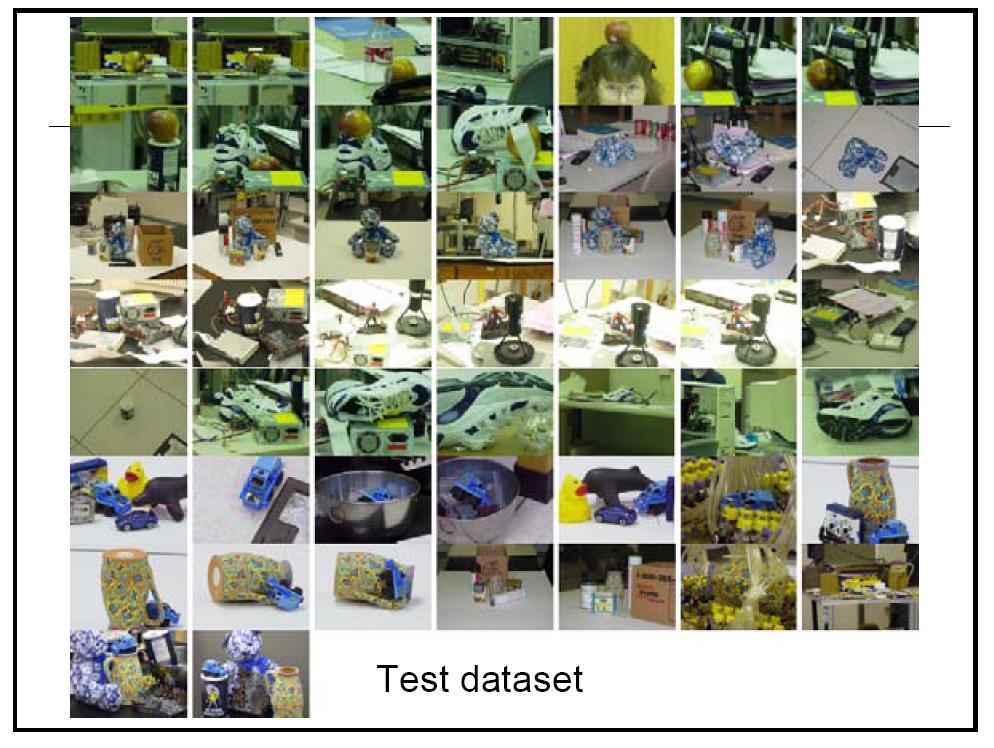
38 3D Object Recognition results Rothganger et al Courtesy of Rothganger et al Handle severe clutter
39
40 A comparative experiment


41 Other multi-view matching algorithms -Ferrari et al. 04, 06 - Lazebnick et al 04 -Brown et al, 05 -Toshev, Shi, Daniilidis, 07
42 Overview Single 3D object recognition Single view object categorization 3D object categorization
43 3D Object Categorization Mixture of 2D single view models Weber et al. 00 Schneiderman et al. 01 Bart et al. 04 Full 3D models Multi-view models Bronstein et al, 03 Ruiz-Correa et al. 03, Funkhouser et al 03 Capel et al 02 Johnson & Herbert 99 Thomas et al. 06 Savarese et al, 07, 08 Chiu et al. 07 Hoiem, et al., 07 Yan, et al. 07 Kushal, et al., 07 Liebelt et al 08 Sun et al 08
44 Mixture of single-view 2D models Weber et al. 00 Schneiderman et al. 01 Single view Model 3D Category model Single view Model


45 Mixture of single-view 2D models Mixture of 2-D models Weber, Welling and Perona CVPR 00 Component 1 Component 2
46 Mixture of single-view 2D models Weber et al. 00 Schneiderman et al. 01 Single view Model 3D Category model Single view Model Single view models are independent No information is shared No sense of correspondences of parts under 3D transformations
47 3D Object Categorization Mixture of 2D single view models Weber et al. 00 Schneiderman et al. 01 Bart et al. 04 Full 3D models Multi-view models Bronstein et al, 03 Ruiz-Correa et al. 03, Funkhouser et al 03 Capel et al 02 Johnson & Herbert 99 Thomas et al. 06 Savarese et al, 07, 08 Chiu et al. 07 Hoiem, et al., 07 Yan, et al. 07 Kushal, et al., 07 Liebelt et al 08 Sun et al 08
48 Full 3D models 3D model instance Bronstein et al, 03 Ruiz-Correa et al. 03, Funkhouser et al 03 Kazhdan et al.03 Osada et al 02 Capel et al 02 Johnson & Herbert 99 Amberg et al 08 3D category model 3D model instance A 3D model category is built from a collection of 3D range data or CAD models


49 Shape distributions Osada et al 02 Spherical harmonics Kazhdan et al. 03



50 Full 3D models 3D model instance Bronstein et al, 03 Ruiz-Correa et al. 03, Funkhouser et al 03 Kazhdan et al.03 Osada et al 02 Capel et al 02 Johnson & Herbert 99 Amberg et al 08 3D category model 3D model instance A 3D model category is built from a collection of 3D range data or CAD models - Build a 3d model is expensive - Difficult to incorporate appearance information - Need to cope with 3D alignment (orientation, scale, etc )
51 3D Object Categorization Mixture of 2D single view models Weber et al. 00 Schneiderman et al. 01 Bart et al. 04 Full 3D models Multi-view models Bronstein et al, 03 Ruiz-Correa et al. 03, Funkhouser et al 03 Capel et al 02 Johnson & Herbert 99 Thomas et al. 06 Savarese et al, 07, 08 Chiu et al. 07 Hoiem, et al., 07 Yan, et al. 07 Kushal, et al., 07 Liebelt et al 08 Sun et al 08
52 Multi-view models 3D Category model Sparse set of interest points or parts of the objects are linked across

53 Multi-view models by rough 3d shapes Yan, et al. 07

54 Multi-view models by rough 3d shapes Hoiem, et al., 0



55 Multi-view models by ISM representations [Thomas et al. 06] Multi-view model Sparse set of interest points or parts of the objects are linked across

![06] Leibe, Leonardis, and Schiele, ECCV Workshop](/docs-images/77/75526164/images/56-1.jpg "on Statistical Learning in Computer Vision 2004")

56 Multi-view models by ISM representations ISM representation [Thomas et al. 06] Leibe, Leonardis, and Schiele, ECCV Workshop on Statistical Learning in Computer Vision 2004 visual codeword with displacement vectors Visual codebook is used to index votes for object position Generalized Hough transform

57 Set of region-tracks connecting model views Each track is composed of image regions of a single physical surface patch along the model views in which it is visible. Combining multi-views and ISM models Region tracks [Ferrari et al. 04, 06] [Thomas et al. 06] Courtesy of Thomas et al. 06
58 Properties View point invariant X Single view/ Mixture Multi-view No supervision # Categories ~300 2 X Category View point Share information across views X View synthesis X X Pose estimation X X
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering Department of Computer Science 3129D,
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering Department of Computer Science 3129D,
Lecture 15 Visual recognition
 Lecture 15 Visual recognition 3D object detection Introduction Single instance 3D object detectors Generic 3D object detectors Silvio Savarese Lecture 15-26-Feb-14 3D object detection Object: Building
Lecture 15 Visual recognition 3D object detection Introduction Single instance 3D object detectors Generic 3D object detectors Silvio Savarese Lecture 15-26-Feb-14 3D object detection Object: Building
EECS 442 Computer vision. 3D Object Recognition and. Scene Understanding
 EECS 442 Computer vision 3D Object Recognition and Scene Understanding Interpreting the visual world Object: Building 8-10 meters away Object: Traffic light Object: Car, ¾ view 2-3 meters away How can
EECS 442 Computer vision 3D Object Recognition and Scene Understanding Interpreting the visual world Object: Building 8-10 meters away Object: Traffic light Object: Car, ¾ view 2-3 meters away How can
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 18 Object Recognition I Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 18 Object Recognition I Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
10/03/11. Model Fitting. Computer Vision CS 143, Brown. James Hays. Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem
 10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Hough Transform and RANSAC
 CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Lecture 9 Fitting and Matching
 Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 8 Fitting and Matching
 Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
EECS 442 Computer vision. Fitting methods
 EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
Part-based models. Lecture 10
 Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Fitting. Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!
! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!") Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Course Administration
 Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Recognizing and Learning Object Categories. Li Fei-Fei, Stanford Rob Fergus, NYU Antonio Torralba, MIT
 Recognizing and Learning Object Categories Li Fei-Fei, Stanford Rob Fergus, NYU Antonio Torralba, MIT Outline 2. Single object categories - Bag of words - Part-based - Discriminative - Detecting single
Recognizing and Learning Object Categories Li Fei-Fei, Stanford Rob Fergus, NYU Antonio Torralba, MIT Outline 2. Single object categories - Bag of words - Part-based - Discriminative - Detecting single
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Photo by Carl Warner
 Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Announcements. Recognition (Part 3) Model-Based Vision. A Rough Recognition Spectrum. Pose consistency. Recognition by Hypothesize and Test
 Model-Based Vision. A Rough Recognition Spectrum. Pose consistency. Recognition by Hypothesize and Test") Announcements (Part 3) CSE 152 Lecture 16 Homework 3 is due today, 11:59 PM Homework 4 will be assigned today Due Sat, Jun 4, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying
Announcements (Part 3) CSE 152 Lecture 16 Homework 3 is due today, 11:59 PM Homework 4 will be assigned today Due Sat, Jun 4, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Recognition (Part 4) Introduction to Computer Vision CSE 152 Lecture 17
 Introduction to Computer Vision CSE 152 Lecture 17") Recognition (Part 4) CSE 152 Lecture 17 Announcements Homework 5 is due June 9, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images
Recognition (Part 4) CSE 152 Lecture 17 Announcements Homework 5 is due June 9, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images
Feature Matching + Indexing and Retrieval
 CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
CV as making bank. Intel buys Mobileye! $15 billion. Mobileye:
 CV as making bank Intel buys Mobileye! $15 billion Mobileye: Spin-off from Hebrew University, Israel 450 engineers 15 million cars installed 313 car models June 2016 - Tesla left Mobileye Fatal crash car
CV as making bank Intel buys Mobileye! $15 billion Mobileye: Spin-off from Hebrew University, Israel 450 engineers 15 million cars installed 313 car models June 2016 - Tesla left Mobileye Fatal crash car
RANSAC and some HOUGH transform
 RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
Local Features based Object Categories and Object Instances Recognition
 Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
RANSAC: RANdom Sampling And Consensus
 CS231-M RANSAC: RANdom Sampling And Consensus Roland Angst rangst@stanford.edu www.stanford.edu/~rangst CS231-M 2014-04-30 1 The Need for RANSAC Why do I need RANSAC? I know robust statistics! Robust Statistics
CS231-M RANSAC: RANdom Sampling And Consensus Roland Angst rangst@stanford.edu www.stanford.edu/~rangst CS231-M 2014-04-30 1 The Need for RANSAC Why do I need RANSAC? I know robust statistics! Robust Statistics
Invariant Features from Interest Point Groups
 Invariant Features from Interest Point Groups Matthew Brown and David Lowe {mbrown lowe}@cs.ubc.ca Department of Computer Science, University of British Columbia, Vancouver, Canada. Abstract This paper
Invariant Features from Interest Point Groups Matthew Brown and David Lowe {mbrown lowe}@cs.ubc.ca Department of Computer Science, University of British Columbia, Vancouver, Canada. Abstract This paper
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Week 2: Two-View Geometry. Padua Summer 08 Frank Dellaert
 Week 2: Two-View Geometry Padua Summer 08 Frank Dellaert Mosaicking Outline 2D Transformation Hierarchy RANSAC Triangulation of 3D Points Cameras Triangulation via SVD Automatic Correspondence Essential
Week 2: Two-View Geometry Padua Summer 08 Frank Dellaert Mosaicking Outline 2D Transformation Hierarchy RANSAC Triangulation of 3D Points Cameras Triangulation via SVD Automatic Correspondence Essential
Object and Class Recognition I:
 Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
Fitting. Fitting. Slides S. Lazebnik Harris Corners Pkwy, Charlotte, NC
 Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Model Fitting: The Hough transform II
 Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
Lecture 16: Object recognition: Part-based generative models
 Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC
 COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to:
COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to:
Automatic Image Alignment
 Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Automatic Image Alignment
 Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
3D Object Modeling and Recognition Using Affine-Invariant Patches and Multi-View Spatial Constraints
 3D Object Modeling and Recognition Using Affine-Invariant Patches and Multi-View Spatial Constraints Fredrick Rothganger, Svetlana Lazebnik, Cordelia Schmid, and Jean Ponce Department of Computer Science
3D Object Modeling and Recognition Using Affine-Invariant Patches and Multi-View Spatial Constraints Fredrick Rothganger, Svetlana Lazebnik, Cordelia Schmid, and Jean Ponce Department of Computer Science
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
RANSAC RANdom SAmple Consensus
 Talk Outline importance for computer vision principle line fitting epipolar geometry estimation RANSAC RANdom SAmple Consensus Tomáš Svoboda, svoboda@cmp.felk.cvut.cz courtesy of Ondřej Chum, Jiří Matas
Talk Outline importance for computer vision principle line fitting epipolar geometry estimation RANSAC RANdom SAmple Consensus Tomáš Svoboda, svoboda@cmp.felk.cvut.cz courtesy of Ondřej Chum, Jiří Matas
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Constructing Implicit 3D Shape Models for Pose Estimation
 Constructing Implicit 3D Shape Models for Pose Estimation Mica Arie-Nachimson Ronen Basri Dept. of Computer Science and Applied Math. Weizmann Institute of Science Rehovot 76100, Israel Abstract We present
Constructing Implicit 3D Shape Models for Pose Estimation Mica Arie-Nachimson Ronen Basri Dept. of Computer Science and Applied Math. Weizmann Institute of Science Rehovot 76100, Israel Abstract We present
Model Fitting. Introduction to Computer Vision CSE 152 Lecture 11
 Model Fitting CSE 152 Lecture 11 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 10: Grouping and Model Fitting What to do with edges? Segment linked edge chains into curve features (e.g.,
Model Fitting CSE 152 Lecture 11 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 10: Grouping and Model Fitting What to do with edges? Segment linked edge chains into curve features (e.g.,
3dRR: Representation and Recognition
 CS331B (3 units) 3dRR: Representation and Recognition Instructor: Silvio Savarese Email: ssilvio@stanford.edu Office: Gates, room: 228 Office hour: by appointment TA: Scott Chung scottc52@gmail.com Class
CS331B (3 units) 3dRR: Representation and Recognition Instructor: Silvio Savarese Email: ssilvio@stanford.edu Office: Gates, room: 228 Office hour: by appointment TA: Scott Chung scottc52@gmail.com Class
Today. Introduction to recognition Alignment based approaches 11/4/2008
 Today Introduction to recognition Alignment based approaches Tuesday, Nov 4 Brief recap of visual words Introduction to recognition problem Recognition by alignment, pose clustering Kristen Grauman UT
Today Introduction to recognition Alignment based approaches Tuesday, Nov 4 Brief recap of visual words Introduction to recognition problem Recognition by alignment, pose clustering Kristen Grauman UT
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Multiple View Geometry. Frank Dellaert
 Multiple View Geometry Frank Dellaert Outline Intro Camera Review Stereo triangulation Geometry of 2 views Essential Matrix Fundamental Matrix Estimating E/F from point-matches Why Consider Multiple Views?
Multiple View Geometry Frank Dellaert Outline Intro Camera Review Stereo triangulation Geometry of 2 views Essential Matrix Fundamental Matrix Estimating E/F from point-matches Why Consider Multiple Views?
Model Fitting, RANSAC. Jana Kosecka
 Model Fitting, RANSAC Jana Kosecka Fitting: Overview If we know which points belong to the line, how do we find the optimal line parameters? Least squares What if there are outliers? Robust fitting, RANSAC
Model Fitting, RANSAC Jana Kosecka Fitting: Overview If we know which points belong to the line, how do we find the optimal line parameters? Least squares What if there are outliers? Robust fitting, RANSAC
Object Recognition and Augmented Reality
 11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
EECS 442 Computer vision. Object Recognition
 EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Challenges: intraclass variation
EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Challenges: intraclass variation
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
EE290T : 3D Reconstruction and Recognition
 EE290T : 3D Reconstruction and Recognition Acknowledgement Courtesy of Prof. Silvio Savarese. Introduction There was a table set out under a tree in front of the house, and the March Hare and the Hatter
EE290T : 3D Reconstruction and Recognition Acknowledgement Courtesy of Prof. Silvio Savarese. Introduction There was a table set out under a tree in front of the house, and the March Hare and the Hatter
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Perception IV: Place Recognition, Line Extraction
 Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Machine Learning Crash Course
 Machine Learning Crash Course Photo: CMU Machine Learning Department protests G20 Computer Vision James Hays Slides: Isabelle Guyon, Erik Sudderth, Mark Johnson, Derek Hoiem The machine learning framework
Machine Learning Crash Course Photo: CMU Machine Learning Department protests G20 Computer Vision James Hays Slides: Isabelle Guyon, Erik Sudderth, Mark Johnson, Derek Hoiem The machine learning framework
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections
 Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections Nima Razavi 1, Juergen Gall 1, and Luc Van Gool 1,2 1 Computer Vision Laboratory, ETH Zurich 2 ESAT-PSI/IBBT,
Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections Nima Razavi 1, Juergen Gall 1, and Luc Van Gool 1,2 1 Computer Vision Laboratory, ETH Zurich 2 ESAT-PSI/IBBT,
EECS 442 Computer Vision fall 2011
 EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
Vision par ordinateur
 Epipolar geometry π Vision par ordinateur Underlying structure in set of matches for rigid scenes l T 1 l 2 C1 m1 l1 e1 M L2 L1 e2 Géométrie épipolaire Fundamental matrix (x rank 2 matrix) m2 C2 l2 Frédéric
Epipolar geometry π Vision par ordinateur Underlying structure in set of matches for rigid scenes l T 1 l 2 C1 m1 l1 e1 M L2 L1 e2 Géométrie épipolaire Fundamental matrix (x rank 2 matrix) m2 C2 l2 Frédéric
Video Scene Categorization by 3D Hierarchical Histogram Matching
 Video Scene Categorization by 3D Hierarchical Histogram Matching Paritosh Gupta 1, Sai Sankalp Arrabolu 1, Mathew Brown 2 and Silvio Savarese 1 1 University of Michigan, Ann Arbor, USA 2 University of
Video Scene Categorization by 3D Hierarchical Histogram Matching Paritosh Gupta 1, Sai Sankalp Arrabolu 1, Mathew Brown 2 and Silvio Savarese 1 1 University of Michigan, Ann Arbor, USA 2 University of
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Detection. Sanja Fidler CSC420: Intro to Image Understanding 1/ 1
 Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Recovering structure from a single view Pinhole perspective projection
 EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
Robust Geometry Estimation from two Images
 Robust Geometry Estimation from two Images Carsten Rother 09/12/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation Process 09/12/2016 2 Appearance-based
Robust Geometry Estimation from two Images Carsten Rother 09/12/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation Process 09/12/2016 2 Appearance-based
Computer Vision I. Announcements. Random Dot Stereograms. Stereo III. CSE252A Lecture 16
 Announcements Stereo III CSE252A Lecture 16 HW1 being returned HW3 assigned and due date extended until 11/27/12 No office hours today No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in
Announcements Stereo III CSE252A Lecture 16 HW1 being returned HW3 assigned and due date extended until 11/27/12 No office hours today No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Augmenting Reality, Naturally:
 Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
C280, Computer Vision
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
Technical Report No D Object Recognition using Local Shape Descriptors. Mustafa Mohamad
 Technical Report No. 2013-614 3D Object Recognition using Local Shape Descriptors Mustafa Mohamad School of Computing Queen s University Kingston, Ontario, Canada mustafa@cs.queensu.ca November 7, 2013
Technical Report No. 2013-614 3D Object Recognition using Local Shape Descriptors Mustafa Mohamad School of Computing Queen s University Kingston, Ontario, Canada mustafa@cs.queensu.ca November 7, 2013
Prof. Kristen Grauman
 Fitting Prof. Kristen Grauman UT Austin Fitting Want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For eample, the model could be a line, a circle, or an arbitrary shape.
Fitting Prof. Kristen Grauman UT Austin Fitting Want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For eample, the model could be a line, a circle, or an arbitrary shape.
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Fitting: Voting and the Hough Transform April 23 rd, Yong Jae Lee UC Davis
 Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,