BIOMECHANICAL MODELLING
|
|
|
- Arnold Martin
- 6 years ago
- Views:
Transcription



1 BIOMECHANICAL MODELLING SERDAR ARITAN Biomechanics Research Group School of Sport Science&Technology Hacettepe University, Ankara, Turkey De Motu Animalium G.Borelli (1680) 1
2 WHY MODELLİNG? A model can quantify things we cannot measure: Forces and torques on the joints Individual muscle forces Joint reactions Force Forward Dynamics Inverse Dynamics Position Modelling in biomechanics works as an interface between the body and measurement settings. 2



 Euler")
3 CLASSICAL MECHANICS Whichever approach is used for modelling, first of all, the equation of motion has to be derived. The dynamics of biomechanical systems is based on classical mechanics. Newton ( ) Euler ( ) D Alembert ( ) Lagrance ( ) 3
4 CLASSICAL MECHANICS Lagrangian Dynamics Lagrange s equations of motion are specified in terms of the total energy of the body in the kinematic chain. Newton-Euler Dynamics In this method, the Newton-Euler equations are applied to each body in the model. All forces affecting each body must be considered, which makes this method difficult and tedious for complex systems. D Alembert s Principle Equations of motion are derived by identifying all forces on each body go through an acceleration and writing equilibrium equations. These equilibrium equations are simultaneously solved to obtain the dynamic system response. Kane s Dynamics This method is a subset of the group of methods known as Lagrange s form of D Alembert s Principle. The Newton-Euler equations are multiplied by special vectors to develop scalar representations of the forces acting on each body. 4
5 HOW TO CALCULATE Modelling Methods Displacement Velocity Acceleration x y z d dt v x v y vz d dt a x a y a z Equations of motions Mechanics in 3-D M I F ma Things get enormously complicated in 3-D The mass moment of inertia becomes a tensor The angles or orientation are difficult to define uniquely because many different rotation combinations can lead to the same position. 5



6 RIGID BODY MECHANICS Inverse Dynamics Displacement is input Force is output No muscle interaction Free-Body Diagram of Long Jumper Newton-Euler Method Alptekin, A., Arıtan, S. (2008). Biomechanical Analysis Of the Takeoff Phase in the Long Jump. IV. National Biomechanics Congress. Erzurum. 6
.")

7 RIGID BODY MECHANICS Inverse Dynamics Alptekin, A., Arıtan, S. (2008). Biomechanical Analysis Of the Takeoff Phase in the Long Jump. IV. National Biomechanics Congress. Erzurum. 7

 Online Dynamics")
 The Leg Lab.")
8 RIGID BODY MECHANICS Forward Dynamics Force is input Displacement is output No muscle interaction Symbolics Dynamics (SD/FAST) Online Dynamics (AutoLev) Mathworks (Simulink / Simmechanics) The Leg Lab. MIT Animation Lab. Georgia Tech. 8

9 ) ( 2 1 ) ( t m F t v x x t t m F t t v x x dt m F dt v dx x dt dt m F v dx dt m F v dt dx x t m F v v t t m F v v dt m F dv v dt x m d dt dv m ma F t t t x x t t v v F : force m : mass a : acceleration v : velocity x : displacement t : Iteration step time Animation Lab. Georgia Tech. RIGID BODY MECHANICS Calculations of kinematics by integrating of equations of movement Euler Method [Euler ]

10 RIGID BODY MECHANICS Forward Dynamics - SimMechanics Example 10


11 RIGID BODY MECHANICS Forward Dynamics - SimMechanics Example Biomechanics Lab. Hacettepe University 11


12 RIGID BODY MECHANICS Forward dynamics is often used for musculoskeletal simulation Can be used for injury simulation? Since the movement is output we are faced with the problem of finding the muscle forces that will make the model perform the desired movement muscles were modelled. Muscle forces were calculated by using Hill s Equation (1938) F F b av 0 [ l( x )] b v 12


13 RIGID BODY MECHANICS Forward dynamics is often used for musculoskeletal simulation AnyBody Simulation, Denmak 13

14 RIGID BODY MECHANICS Forward dynamics is often used for musculoskeletal simulation OpenSim, USA 14

15 RIGID BODY MECHANICS Forward dynamics is often used for musculoskeletal simulation OpenSim, USA 15

16 RIGID BODY MECHANICS Forward dynamics is often used for musculoskeletal simulation OpenSim, USA 16
17 RIGID BODY MECHANICS EMG-Driven Models Basic idea. Record EMG from an experiment. Process the EMG to a muscle activation signal. Activate muscles in a computer model using the processed signal. The muscle activation signal is initially forward-simulated to produce a muscle contraction history. The muscle contractions create movement. Adjust the process parameters to get the right movement out of the model. 17


18 DEFORMABLE BODY MECHANICS Finite Element Modelling ELEMENT MESHES CAN BE COMPLICATED f k u f : force vector k : stifness matrix u : displacement vector 18




19 DEFORMABLE BODY MECHANICS Finite Element Modelling Mesh Generation from MRI Arıtan S. et al. (1997) Program for generation of three-dimensional finite element mesh from magnetic imaging scans. Med.Eng&Phys. 19

20 DEFORMABLE BODY MECHANICS Finite Element Modelling Mesh Generation 20


21 DEFORMABLE BODY MECHANICS Finite Element Modelling Simulation of what we can not measure Strees distrubition on the medial collateral ligament 21


22 DEFORMABLE BODY MECHANICS Finite Element Modelling with Kinematics Asai T. University of Yamagata 22


23 DEFORMABLE BODY MECHANICS Finite Element Modelling with Kinematics Asai T. University of Yamagata 23



24 DEFORMABLE BODY MECHANICS Finite Element Modelling on Layers 24


25 DEFORMABLE BODY MECHANICS Finite Element Modelling Whole Body FEA? The solution is only completely accurate in special cases. Finite element models are usually stiffer than the real structures Increasing the number of elements descreases the stiffness until it converges to the true value 25



26 DEFORMABLE BODY MECHANICS Mechanical Properties of on Layers S. Arıtan et al. A mechanical model representation of the in vivo creep behaviour of muscular bulk tissue / Journal of Biomechanics 26

27 INJURY When it happens? An unfortune Situation Abdüllaziz Alpak 105+ kg 185 kg Snatch 2.nd attempt 27


28 INJURY Being on the right place on the right time Weight -Lifting Platform were already calibrated for the movement analysis Camera 1 Camera 2 Abdüllaziz Alpak 185 kg Snatch 2.nd attempt 28

29 INJURY History Spondylolysis 29

30 INJURY History : Spondylolysis Injury : Total Rapture Medial Collateral Ligament 30


 Cameras")



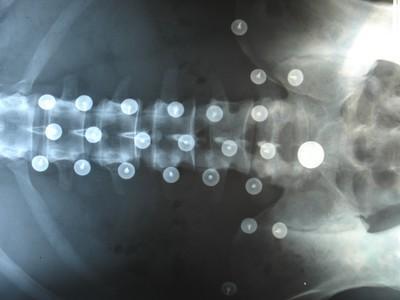
31 UNDERSTANDING OF MECHANISM OF SPORTS INJURIES Total 5 Video (PAL) Cameras were Used 3 Cameras captured the spinal markers 2 Cameras were used to record body markers 31



32 UNDERSTANDING OF MECHANISM OF SPORTS INJURIES Placement of Spinal Markers and Calibration 32





33 UNDERSTANDING OF MECHANISM OF SPORTS INJURIES Experimental Setup 33
34 UNDERSTANDING OF MECHANISM OF SPORTS INJURIES Spine and Body Movement An Inverse Dynamics Study Torque on L5, Calculated by D Alembert Principle 34

35 Modelling is not only science and mathematics, it is also an art. Cahit Arf, ( ) 35


36 School of Sport Science and Technology Hacettepe University Beytepe Campus Thank you for your Attention 36
37
38
39
40
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
MUSCULOSKELETAL SIMULATION :
 TUTORIAL MUSCULOSKELETAL SIMULATION : FROM MOTION CAPTURE TO MUSCULAR ACTIVITY IN LOWER LIMB MODELS Nicolas Pronost and Anders Sandholm Musculoskeletal simulation? What is it? 2 Musculoskeletal simulation?
TUTORIAL MUSCULOSKELETAL SIMULATION : FROM MOTION CAPTURE TO MUSCULAR ACTIVITY IN LOWER LIMB MODELS Nicolas Pronost and Anders Sandholm Musculoskeletal simulation? What is it? 2 Musculoskeletal simulation?
What Is SimMechanics?
 SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
Multibody dynamics and numerical modelling of muscles LORENZO GRASSI
 Multibody dynamics and numerical modelling of muscles LORENZO GRASSI Agenda 10:15 Lecture: Introduction to modelling locomotion and inverse dynamics 11:00 Break/questions 11:15 Opportunities in the biomechanics
Multibody dynamics and numerical modelling of muscles LORENZO GRASSI Agenda 10:15 Lecture: Introduction to modelling locomotion and inverse dynamics 11:00 Break/questions 11:15 Opportunities in the biomechanics
Documents. OpenSim Tutorial. March 10, 2009 GCMAS Annual Meeting, Denver, CO. Jeff Reinbolt, Ajay Seth, Scott Delp. Website: SimTK.
 Documents OpenSim Tutorial March 10, 2009 GCMAS Annual Meeting, Denver, CO Jeff Reinbolt, Ajay Seth, Scott Delp Website: SimTK.org/home/opensim OpenSim Tutorial Agenda 10:30am 10:40am Welcome and goals
Documents OpenSim Tutorial March 10, 2009 GCMAS Annual Meeting, Denver, CO Jeff Reinbolt, Ajay Seth, Scott Delp Website: SimTK.org/home/opensim OpenSim Tutorial Agenda 10:30am 10:40am Welcome and goals
Dynamic Analysis of Manipulator Arm for 6-legged Robot
 American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
A simple example. Assume we want to find the change in the rotation angles to get the end effector to G. Effect of changing s
 CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
Applications. Systems. Motion capture pipeline. Biomechanical analysis. Graphics research
 Motion capture Applications Systems Motion capture pipeline Biomechanical analysis Graphics research Applications Computer animation Biomechanics Robotics Cinema Video games Anthropology What is captured?
Motion capture Applications Systems Motion capture pipeline Biomechanical analysis Graphics research Applications Computer animation Biomechanics Robotics Cinema Video games Anthropology What is captured?
COMPUTATIONAL DYNAMICS
 COMPUTATIONAL DYNAMICS THIRD EDITION AHMED A. SHABANA Richard and Loan Hill Professor of Engineering University of Illinois at Chicago A John Wiley and Sons, Ltd., Publication COMPUTATIONAL DYNAMICS COMPUTATIONAL
COMPUTATIONAL DYNAMICS THIRD EDITION AHMED A. SHABANA Richard and Loan Hill Professor of Engineering University of Illinois at Chicago A John Wiley and Sons, Ltd., Publication COMPUTATIONAL DYNAMICS COMPUTATIONAL
OpenSim Tutorial #3 Scaling, Inverse Kinematics, and Inverse Dynamics
 OpenSim Tutorial #3 Scaling, Inverse Kinematics, and Inverse Dynamics Samuel Hamner, Clay Anderson, Eran Guendelman, Chand John, Jeff Reinbolt, Scott Delp Neuromuscular Biomechanics Laboratory Stanford
OpenSim Tutorial #3 Scaling, Inverse Kinematics, and Inverse Dynamics Samuel Hamner, Clay Anderson, Eran Guendelman, Chand John, Jeff Reinbolt, Scott Delp Neuromuscular Biomechanics Laboratory Stanford
Is my simulation good enough? Validation & Verification for Biomechanical Modeling and Simulation
 Is my simulation good enough? Validation & Verification for Biomechanical Modeling and Simulation Definitions: Validation and Verification Verification The process of determining that a computational model
Is my simulation good enough? Validation & Verification for Biomechanical Modeling and Simulation Definitions: Validation and Verification Verification The process of determining that a computational model
A Simplified Vehicle and Driver Model for Vehicle Systems Development
 A Simplified Vehicle and Driver Model for Vehicle Systems Development Martin Bayliss Cranfield University School of Engineering Bedfordshire MK43 0AL UK Abstract For the purposes of vehicle systems controller
A Simplified Vehicle and Driver Model for Vehicle Systems Development Martin Bayliss Cranfield University School of Engineering Bedfordshire MK43 0AL UK Abstract For the purposes of vehicle systems controller
Lecture VI: Constraints and Controllers. Parts Based on Erin Catto s Box2D Tutorial
 Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
COPYRIGHTED MATERIAL INTRODUCTION CHAPTER 1
 CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
INTRODUCTION CHAPTER 1
 CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
THEORETICAL AND EXPERIMENTAL RESEARCHES ON THE DYNAMICS OF MOBILE ROBOTS
 Revista Mecanisme şi Manipulatoare, Vol., Nr., 6, pag. 67-7 ARoMM-IFoMM HEOREICAL AND EXPERIMENAL RESEARCHES ON HE DYNAMICS OF MOBILE ROBOS Nicolae DUMIRU *, Mirela CHERCIU** *) Prof. dr. ing. Universitatea
Revista Mecanisme şi Manipulatoare, Vol., Nr., 6, pag. 67-7 ARoMM-IFoMM HEOREICAL AND EXPERIMENAL RESEARCHES ON HE DYNAMICS OF MOBILE ROBOS Nicolae DUMIRU *, Mirela CHERCIU** *) Prof. dr. ing. Universitatea
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
INPUT PARAMETERS FOR MODELS I
 9A-1 INPUT PARAMETERS FOR MODELS I Lecture Overview Equations of motion Estimation of muscle forces Required model parameters Body segment inertial parameters Muscle moment arms and length Osteometric
9A-1 INPUT PARAMETERS FOR MODELS I Lecture Overview Equations of motion Estimation of muscle forces Required model parameters Body segment inertial parameters Muscle moment arms and length Osteometric
Documents. OpenSim Workshop. September 20-22, 2011 HYPER Summer School, La Alberca, Spain. Jeff Reinbolt, Jen Hicks. Website: SimTK.
 Documents OpenSim Workshop September 20-22, 2011 HYPER Summer School, La Alberca, Spain Jeff Reinbolt, Jen Hicks Website: SimTK.org/home/opensim OpenSim Workshop Agenda 14:00 14:15 Welcome and goals of
Documents OpenSim Workshop September 20-22, 2011 HYPER Summer School, La Alberca, Spain Jeff Reinbolt, Jen Hicks Website: SimTK.org/home/opensim OpenSim Workshop Agenda 14:00 14:15 Welcome and goals of
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR
 SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
SIMULATION LAB #5: Muscle-Actuated Simulation of Kicking
 SIMULATION LAB #5: Muscle-Actuated Simulation of Kicking Modeling and Simulation of Human Movement BME 599 Laboratory Developers: Jeff Reinbolt, Hoa Hoang, B.J. Fregley, Kate Saul Holzbaur, Darryl Thelen,
SIMULATION LAB #5: Muscle-Actuated Simulation of Kicking Modeling and Simulation of Human Movement BME 599 Laboratory Developers: Jeff Reinbolt, Hoa Hoang, B.J. Fregley, Kate Saul Holzbaur, Darryl Thelen,
Interfacing OpenSim models with MATLAB /Simulink. OpenSim Workshop
 Interfacing OpenSim models with MATLAB /Simulink Acknowledgements Why do we care about MATLAB and OpenSim? MATLAB Simulink S- func5on OpenSim Pros World s leading mathematical computing software Used by
Interfacing OpenSim models with MATLAB /Simulink Acknowledgements Why do we care about MATLAB and OpenSim? MATLAB Simulink S- func5on OpenSim Pros World s leading mathematical computing software Used by
Research Subject. Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group)
") Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Musculoskeletal modelling from scratch
 The webcast will start in a few minutes. Musculoskeletal modelling from scratch CONCEPTS M A DE EA SY Outline Introduction by the Host Musculoskeletal modelling from scratch - concepts made easy Webcast
The webcast will start in a few minutes. Musculoskeletal modelling from scratch CONCEPTS M A DE EA SY Outline Introduction by the Host Musculoskeletal modelling from scratch - concepts made easy Webcast
Introduction to Multi-body Dynamics
 division Graduate Course ME 244) Tentative Draft Syllabus 1. Basic concepts in 3-D rigid-body mechanics 1. Rigid body vs flexible body 2. Spatial kinematics (3-D rotation transformations) and Euler theorem
division Graduate Course ME 244) Tentative Draft Syllabus 1. Basic concepts in 3-D rigid-body mechanics 1. Rigid body vs flexible body 2. Spatial kinematics (3-D rotation transformations) and Euler theorem
Lecture VI: Constraints and Controllers
 Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Modeling of Humanoid Systems Using Deductive Approach
 INFOTEH-JAHORINA Vol. 12, March 2013. Modeling of Humanoid Systems Using Deductive Approach Miloš D Jovanović Robotics laboratory Mihailo Pupin Institute Belgrade, Serbia milos.jovanovic@pupin.rs Veljko
INFOTEH-JAHORINA Vol. 12, March 2013. Modeling of Humanoid Systems Using Deductive Approach Miloš D Jovanović Robotics laboratory Mihailo Pupin Institute Belgrade, Serbia milos.jovanovic@pupin.rs Veljko
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Last Time? Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Computer Animation Fundamentals. Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics
 Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Motion Control Methods for Skeleton Daniel Thalmann
 Motion Control Methods for Skeleton Daniel Thalmann Cagliari, May 2008 Animation of articulated bodies Characters, humans, animals, robots. Characterized by hierarchical structure: skeleton. Skeleton:
Motion Control Methods for Skeleton Daniel Thalmann Cagliari, May 2008 Animation of articulated bodies Characters, humans, animals, robots. Characterized by hierarchical structure: skeleton. Skeleton:
Musculoskeletal Modeling and Simulation of Human Movement Workshop (WS5)
") Musculoskeletal Modeling and Simulation of Human Movement Workshop (WS5) Massimo Sartori Department of Neurorehabilitation Engineering University Medical Center Göttingen, Germany Monica Reggiani Department
Musculoskeletal Modeling and Simulation of Human Movement Workshop (WS5) Massimo Sartori Department of Neurorehabilitation Engineering University Medical Center Göttingen, Germany Monica Reggiani Department
COMP 175 COMPUTER GRAPHICS. Lecture 10: Animation. COMP 175: Computer Graphics March 12, Erik Anderson 08 Animation
 Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics. Velocity Interpolation. Handing Free Surface with MAC
 Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
Animation Lecture 10 Slide Fall 2003
 Animation Lecture 10 Slide 1 6.837 Fall 2003 Conventional Animation Draw each frame of the animation great control tedious Reduce burden with cel animation layer keyframe inbetween cel panoramas (Disney
Animation Lecture 10 Slide 1 6.837 Fall 2003 Conventional Animation Draw each frame of the animation great control tedious Reduce burden with cel animation layer keyframe inbetween cel panoramas (Disney
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
The Jello Cube Assignment 1, CSCI 520. Jernej Barbic, USC
 The Jello Cube Assignment 1, CSCI 520 Jernej Barbic, USC 1 The jello cube Undeformed cube Deformed cube The jello cube is elastic, Can be bent, stretched, squeezed,, Without external forces, it eventually
The Jello Cube Assignment 1, CSCI 520 Jernej Barbic, USC 1 The jello cube Undeformed cube Deformed cube The jello cube is elastic, Can be bent, stretched, squeezed,, Without external forces, it eventually
Announcements: Quiz. Animation, Motion Capture, & Inverse Kinematics. Last Time? Today: How do we Animate? Keyframing. Procedural Animation
 Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
ACTIVITY FIVE-A NEWTON S SECOND LAW: THE ATWOOD MACHINE
 1 ACTIVITY FIVE-A NEWTON S SECOND LAW: THE ATWOOD MACHINE PURPOSE For this experiment, the Motion Visualizer (MV) is used to capture the motion of two masses which are suspended above the ground and connected
1 ACTIVITY FIVE-A NEWTON S SECOND LAW: THE ATWOOD MACHINE PURPOSE For this experiment, the Motion Visualizer (MV) is used to capture the motion of two masses which are suspended above the ground and connected
2.7 Cloth Animation. Jacobs University Visualization and Computer Graphics Lab : Advanced Graphics - Chapter 2 123
 2.7 Cloth Animation 320491: Advanced Graphics - Chapter 2 123 Example: Cloth draping Image Michael Kass 320491: Advanced Graphics - Chapter 2 124 Cloth using mass-spring model Network of masses and springs
2.7 Cloth Animation 320491: Advanced Graphics - Chapter 2 123 Example: Cloth draping Image Michael Kass 320491: Advanced Graphics - Chapter 2 124 Cloth using mass-spring model Network of masses and springs
WHITE PAPER: Mischa Muehling 1,Tim Weber 1, 2, Philipp Russ 3, Sebastian Dendorfer 1, 2 1
 WHITE PAPER: 1 Prediction of ground reaction s and moments by using gait analysis silhouette tracking method compared to marker tracking and platform method Mischa Muehling 1,Tim Weber 1, 2, Philipp Russ
WHITE PAPER: 1 Prediction of ground reaction s and moments by using gait analysis silhouette tracking method compared to marker tracking and platform method Mischa Muehling 1,Tim Weber 1, 2, Philipp Russ
MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR
 MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR N Narayan Rao 1, T Ashok 2, Anup Kumar Tammana 3 1 Assistant Professor, Department of Mechanical Engineering, VFSTRU, Guntur, India. nandurerao@gmail.com
MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR N Narayan Rao 1, T Ashok 2, Anup Kumar Tammana 3 1 Assistant Professor, Department of Mechanical Engineering, VFSTRU, Guntur, India. nandurerao@gmail.com
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
David Wagner, Kaan Divringi, Can Ozcan Ozen Engineering
 Internal Forces of the Femur: An Automated Procedure for Applying Boundary Conditions Obtained From Inverse Dynamic Analysis to Finite Element Simulations David Wagner, Kaan Divringi, Can Ozcan Ozen Engineering
Internal Forces of the Femur: An Automated Procedure for Applying Boundary Conditions Obtained From Inverse Dynamic Analysis to Finite Element Simulations David Wagner, Kaan Divringi, Can Ozcan Ozen Engineering
An Improved Dynamic Modeling of a 3-RPS Parallel Manipulator using the concept of DeNOC Matrices
 An Improved Dynamic Modeling of a 3-RPS Parallel Manipulator using the concept of DeNOC Matrices A. Rahmani Hanzaki, E. Yoosefi Abstract A recursive dynamic modeling of a three-dof parallel robot, namely,
An Improved Dynamic Modeling of a 3-RPS Parallel Manipulator using the concept of DeNOC Matrices A. Rahmani Hanzaki, E. Yoosefi Abstract A recursive dynamic modeling of a three-dof parallel robot, namely,
Example 24 Spring-back
 Example 24 Spring-back Summary The spring-back simulation of sheet metal bent into a hat-shape is studied. The problem is one of the famous tests from the Numisheet 93. As spring-back is generally a quasi-static
Example 24 Spring-back Summary The spring-back simulation of sheet metal bent into a hat-shape is studied. The problem is one of the famous tests from the Numisheet 93. As spring-back is generally a quasi-static
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,800 116,000 120M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,800 116,000 120M Open access books available International authors and editors Downloads Our
Animation, Motion Capture, & Inverse Kinematics. Announcements: Quiz
 Animation, Motion Capture, & Inverse Kinematics Announcements: Quiz On Tuesday (3/10), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Animation, Motion Capture, & Inverse Kinematics Announcements: Quiz On Tuesday (3/10), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Patient-Specific Model-building and Scaling with the Musculoskeletal. Statistical Shape Modeling
 Patient-Specific Model-building and Scaling with the Musculoskeletal Atlas Project and Statistical Shape Modeling Can t hear us? Select Audio -> Integrated VoIP -> Join Conference Thor Besier and Ju Zhang
Patient-Specific Model-building and Scaling with the Musculoskeletal Atlas Project and Statistical Shape Modeling Can t hear us? Select Audio -> Integrated VoIP -> Join Conference Thor Besier and Ju Zhang
Biomechanics of the humanmachine-interface. SIMPACK User-Meeting November Theoretical Astrophysics Dept. Biomechanics University Tübingen
 Biomechanics of the humanmachine-interface SIMPACK User-Meeting November 2004 Theoretical Astrophysics Dept. Biomechanics University Tübingen Project: Homunkulus Human MKS Model Flexible in application
Biomechanics of the humanmachine-interface SIMPACK User-Meeting November 2004 Theoretical Astrophysics Dept. Biomechanics University Tübingen Project: Homunkulus Human MKS Model Flexible in application
KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT
 Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT Nadia Ramona CREŢESCU 1 Abstract: This
Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT Nadia Ramona CREŢESCU 1 Abstract: This
The Mathematical Model and Computer Simulation of a Quadruped Robot
 Research Experience for Undergraduates 2014 Milwaukee School of Engineering National Science Foundation Grant June 1- August 8, 2014 The Mathematical Model and Computer Simulation of a Quadruped Robot
Research Experience for Undergraduates 2014 Milwaukee School of Engineering National Science Foundation Grant June 1- August 8, 2014 The Mathematical Model and Computer Simulation of a Quadruped Robot
Motion Control of Wearable Walking Support System with Accelerometer Considering Swing Phase Support
 Proceedings of the 17th IEEE International Symposium on Robot and Human Interactive Communication, Technische Universität München, Munich, Germany, August 1-3, Motion Control of Wearable Walking Support
Proceedings of the 17th IEEE International Symposium on Robot and Human Interactive Communication, Technische Universität München, Munich, Germany, August 1-3, Motion Control of Wearable Walking Support
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
CS 231. Deformation simulation (and faces)
") CS 231 Deformation simulation (and faces) Deformation BODY Simulation Discretization Spring-mass models difficult to model continuum properties Simple & fast to implement and understand Finite Element
CS 231 Deformation simulation (and faces) Deformation BODY Simulation Discretization Spring-mass models difficult to model continuum properties Simple & fast to implement and understand Finite Element
Chapter 3: Computer Animation Reminder: Descriptive animation. Procedural animation : Examples. Towards methods that generate motion?
 Chapter 3 : Computer Animation (continued) Chapter 3: Computer Animation Reminder: Descriptive animation Describes a single motion, with manual control Ex: direct kinematics with key-frames, inverse kinematics
Chapter 3 : Computer Animation (continued) Chapter 3: Computer Animation Reminder: Descriptive animation Describes a single motion, with manual control Ex: direct kinematics with key-frames, inverse kinematics
Optimal motion trajectories. Physically based motion transformation. Realistic character animation with control. Highly dynamic motion
 Realistic character animation with control Optimal motion trajectories Physically based motion transformation, Popovi! and Witkin Synthesis of complex dynamic character motion from simple animation, Liu
Realistic character animation with control Optimal motion trajectories Physically based motion transformation, Popovi! and Witkin Synthesis of complex dynamic character motion from simple animation, Liu
Model Library Mechanics
 Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Functional Anatomy of the Arm for Muscle Forces Estimation
 Functional Anatomy of the Arm for Muscle Forces Estimation Charles Pontonnier, Georges Dumont To cite this version: Charles Pontonnier, Georges Dumont. Functional Anatomy of the Arm for Muscle Forces Estimation.
Functional Anatomy of the Arm for Muscle Forces Estimation Charles Pontonnier, Georges Dumont To cite this version: Charles Pontonnier, Georges Dumont. Functional Anatomy of the Arm for Muscle Forces Estimation.
Motion Capture. Motion Capture in Movies. Motion Capture in Games
 Motion Capture Motion Capture in Movies 2 Motion Capture in Games 3 4 Magnetic Capture Systems Tethered Sensitive to metal Low frequency (60Hz) Mechanical Capture Systems Any environment Measures joint
Motion Capture Motion Capture in Movies 2 Motion Capture in Games 3 4 Magnetic Capture Systems Tethered Sensitive to metal Low frequency (60Hz) Mechanical Capture Systems Any environment Measures joint
Flexible multibody systems - Relative coordinates approach
 Computer-aided analysis of multibody dynamics (part 2) Flexible multibody systems - Relative coordinates approach Paul Fisette (paul.fisette@uclouvain.be) Introduction In terms of modeling, multibody scientists
Computer-aided analysis of multibody dynamics (part 2) Flexible multibody systems - Relative coordinates approach Paul Fisette (paul.fisette@uclouvain.be) Introduction In terms of modeling, multibody scientists
AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO F ^ k.^
 Computer a jap Animation Algorithms and Techniques Second Edition Rick Parent Ohio State University AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Computer a jap Animation Algorithms and Techniques Second Edition Rick Parent Ohio State University AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
SimWise 4D. Integrated Motion and Stress Analysis
 SimWise 4D Integrated Motion and Stress Analysis SimWise 4D Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional performance of mechanical parts and
SimWise 4D Integrated Motion and Stress Analysis SimWise 4D Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional performance of mechanical parts and
Physics Tutorial 2: Numerical Integration Methods
 Physics Tutorial 2: Numerical Integration Methods Summary The concept of numerically solving differential equations is explained, and applied to real time gaming simulation. Some objects are moved in a
Physics Tutorial 2: Numerical Integration Methods Summary The concept of numerically solving differential equations is explained, and applied to real time gaming simulation. Some objects are moved in a
Computer Kit for Development, Modeling, Simulation and Animation of Mechatronic Systems
 Computer Kit for Development, Modeling, Simulation and Animation of Mechatronic Systems Karol Dobrovodský, Pavel Andris, Peter Kurdel Institute of Informatics, Slovak Academy of Sciences Dúbravská cesta
Computer Kit for Development, Modeling, Simulation and Animation of Mechatronic Systems Karol Dobrovodský, Pavel Andris, Peter Kurdel Institute of Informatics, Slovak Academy of Sciences Dúbravská cesta
Mechanical System and SimMechanics Simulation
 American Journal of Mechanical Engineering, 3, Vol., No. 7, 555 Available online at http://pubs.sciepub.com/ajme//7/ Science and Education Publishing DOI:.69/ajme--7 Mechanical System and SimMechanics
American Journal of Mechanical Engineering, 3, Vol., No. 7, 555 Available online at http://pubs.sciepub.com/ajme//7/ Science and Education Publishing DOI:.69/ajme--7 Mechanical System and SimMechanics
Development of an optomechanical measurement system for dynamic stability analysis
 Development of an optomechanical measurement system for dynamic stability analysis Simone Pasinetti Dept. of Information Engineering (DII) University of Brescia Brescia, Italy simone.pasinetti@unibs.it
Development of an optomechanical measurement system for dynamic stability analysis Simone Pasinetti Dept. of Information Engineering (DII) University of Brescia Brescia, Italy simone.pasinetti@unibs.it
Computer Animation and Visualisation. Lecture 3. Motion capture and physically-based animation of characters
 Computer Animation and Visualisation Lecture 3. Motion capture and physically-based animation of characters Character Animation There are three methods Create them manually Use real human / animal motions
Computer Animation and Visualisation Lecture 3. Motion capture and physically-based animation of characters Character Animation There are three methods Create them manually Use real human / animal motions
Simulating Man-Machine Symbiosis
 The webcast will start in a few minutes. Simulating Man-Machine Symbiosis I M PROVED DESIGN SOLUTIONS, FROM ERGONOMICS TO ASSISTIVE T ECHNOLO GY March 15 th 2016 Outline Introduction by the Host Man-Machine
The webcast will start in a few minutes. Simulating Man-Machine Symbiosis I M PROVED DESIGN SOLUTIONS, FROM ERGONOMICS TO ASSISTIVE T ECHNOLO GY March 15 th 2016 Outline Introduction by the Host Man-Machine
Computer Animation. Algorithms and Techniques. z< MORGAN KAUFMANN PUBLISHERS. Rick Parent Ohio State University AN IMPRINT OF ELSEVIER SCIENCE
 Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
CS 231. Deformation simulation (and faces)
") CS 231 Deformation simulation (and faces) 1 Cloth Simulation deformable surface model Represent cloth model as a triangular or rectangular grid Points of finite mass as vertices Forces or energies of points
CS 231 Deformation simulation (and faces) 1 Cloth Simulation deformable surface model Represent cloth model as a triangular or rectangular grid Points of finite mass as vertices Forces or energies of points
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Development of a Model of the Muscle Skeletal System using Adams. Its Application to an Ergonomic Study in Automotive Industry
 Copyright 2004 SAE International 2004-01-2169 Development of a Model of the Muscle Skeletal System using Adams. Its Application to an Ergonomic Study in Automotive Industry G. Esteves IST- UTL C. Ferreira,
Copyright 2004 SAE International 2004-01-2169 Development of a Model of the Muscle Skeletal System using Adams. Its Application to an Ergonomic Study in Automotive Industry G. Esteves IST- UTL C. Ferreira,
Step-by-Step Guide to OpenSim Exercises and Team Project
 Step-by-Step Guide to OpenSim Exercises and Team Project To present some of the tools and capabilities of OpenSim, we will use a simplified model (leg6dof9muscles.osim) throughout this workshop. The model
Step-by-Step Guide to OpenSim Exercises and Team Project To present some of the tools and capabilities of OpenSim, we will use a simplified model (leg6dof9muscles.osim) throughout this workshop. The model
Adaptive Control of 4-DoF Robot manipulator
 Adaptive Control of 4-DoF Robot manipulator Pavel Mironchyk p.mironchyk@yahoo.com arxiv:151.55v1 [cs.sy] Jan 15 Abstract In experimental robotics, researchers may face uncertainties in parameters of a
Adaptive Control of 4-DoF Robot manipulator Pavel Mironchyk p.mironchyk@yahoo.com arxiv:151.55v1 [cs.sy] Jan 15 Abstract In experimental robotics, researchers may face uncertainties in parameters of a
Using RecurDyn. Contents
 Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Motor control learning and modular control architectures. Francesco Nori
 Motor control learning and modular control architectures Francesco Nori Italian Institute of Technology, Genova, ITALY Robotics Brain and Cognitive Sciences Department, (former) member of LIRA-Lab Giorgio
Motor control learning and modular control architectures Francesco Nori Italian Institute of Technology, Genova, ITALY Robotics Brain and Cognitive Sciences Department, (former) member of LIRA-Lab Giorgio
SimWise. 3D Dynamic Motion, and Stress Analysis. integrated with Alibre Design
 SimWise 3D Dynamic Motion, and Stress Analysis integrated with Alibre Design SimWise 4D for Alibre Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional
SimWise 3D Dynamic Motion, and Stress Analysis integrated with Alibre Design SimWise 4D for Alibre Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional
DYNAMIC MODELING AND CONTROL OF THE OMEGA-3 PARALLEL MANIPULATOR
 Proceedings of the 2009 IEEE International Conference on Systems, Man, and Cybernetics San Antonio, TX, USA - October 2009 DYNAMIC MODELING AND CONTROL OF THE OMEGA-3 PARALLEL MANIPULATOR Collins F. Adetu,
Proceedings of the 2009 IEEE International Conference on Systems, Man, and Cybernetics San Antonio, TX, USA - October 2009 DYNAMIC MODELING AND CONTROL OF THE OMEGA-3 PARALLEL MANIPULATOR Collins F. Adetu,
STUDY OF HUMAN WALKING BY SIMMECHANICS
 STUDY OF HUMAN WALKING BY SIMMECHANICS Patrik Kutilek, Ondrej Hajny Czech Technical University in Prague, Faculty of Biomedical Engineering, Czech Republic Abstract In this paper we describe our designed
STUDY OF HUMAN WALKING BY SIMMECHANICS Patrik Kutilek, Ondrej Hajny Czech Technical University in Prague, Faculty of Biomedical Engineering, Czech Republic Abstract In this paper we describe our designed
Laboratory 2: 2D Strain Measurement October 12/13, 2005 BIOEN 5201 Introduction to Biomechanics Instructor: Jeff Weiss TA: Trevor Lujan
 Laboratory 2: 2D Strain Measurement October 12/13, 2005 BIOEN 5201 Introduction to Biomechanics Instructor: Jeff Weiss TA: Trevor Lujan Lab Quiz: A 10 point lab quiz will be given at the beginning of lab
Laboratory 2: 2D Strain Measurement October 12/13, 2005 BIOEN 5201 Introduction to Biomechanics Instructor: Jeff Weiss TA: Trevor Lujan Lab Quiz: A 10 point lab quiz will be given at the beginning of lab
ixcube 4-10 Brief introduction for membrane and cable systems.
 ixcube 4-10 Brief introduction for membrane and cable systems. ixcube is the evolution of 20 years of R&D in the field of membrane structures so it takes a while to understand the basic features. You must
ixcube 4-10 Brief introduction for membrane and cable systems. ixcube is the evolution of 20 years of R&D in the field of membrane structures so it takes a while to understand the basic features. You must
FORCE CONTROL OF LINK SYSTEMS USING THE PARALLEL SOLUTION SCHEME
 FORCE CONTROL OF LIN SYSTEMS USING THE PARALLEL SOLUTION SCHEME Daigoro Isobe Graduate School of Systems and Information Engineering, University of Tsukuba 1-1-1 Tennodai Tsukuba-shi, Ibaraki 35-8573,
FORCE CONTROL OF LIN SYSTEMS USING THE PARALLEL SOLUTION SCHEME Daigoro Isobe Graduate School of Systems and Information Engineering, University of Tsukuba 1-1-1 Tennodai Tsukuba-shi, Ibaraki 35-8573,
ISE 422/ME 478/ISE 522 Robotic Systems
 ISE 422/ME 478/ISE 522 Robotic Systems Overview of Course R. Van Til Industrial & Systems Engineering Dept. Oakland University 1 What kind of robots will be studied? This kind Not this kind 2 Robots Used
ISE 422/ME 478/ISE 522 Robotic Systems Overview of Course R. Van Til Industrial & Systems Engineering Dept. Oakland University 1 What kind of robots will be studied? This kind Not this kind 2 Robots Used
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Humanoid Robots 2: Dynamic Modeling
 Autonomous and Mobile Robotics rof. Giuseppe Oriolo Humanoid Robots 2: Dynamic Modeling modeling multi-body free floating complete model m j I j R j ω j f c j O z y x p ZM conceptual models for walking/balancing
Autonomous and Mobile Robotics rof. Giuseppe Oriolo Humanoid Robots 2: Dynamic Modeling modeling multi-body free floating complete model m j I j R j ω j f c j O z y x p ZM conceptual models for walking/balancing
MSMS (02PCYQW)
") MSMS (02PCYQW) 2016-2017 Organization: the course is composed of two parts: the first part is devoted to the Lagrange (LAG) approach the second part is devoted to the Bond-Graph (BG) approach Each part
MSMS (02PCYQW) 2016-2017 Organization: the course is composed of two parts: the first part is devoted to the Lagrange (LAG) approach the second part is devoted to the Bond-Graph (BG) approach Each part
2. Motion Analysis - Sim-Mechanics
 2 Motion Analysis - Sim-Mechanics Figure 1 - The RR manipulator frames The following table tabulates the summary of different types of analysis that is performed for the RR manipulator introduced in the
2 Motion Analysis - Sim-Mechanics Figure 1 - The RR manipulator frames The following table tabulates the summary of different types of analysis that is performed for the RR manipulator introduced in the
Rigging / Skinning. based on Taku Komura, Jehee Lee and Charles B.Own's slides
 Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Virtual Marionettes: A System and Paradigm for Real-Time 3D Animation
 Virtual Marionettes: A System and Paradigm for Real-Time 3D Animation Adi Bar-Lev, Alfred M. Bruckstein, Gershon Elber Computer Science Department Technion, I.I.T. 32000 Haifa, Israel Abstract This paper
Virtual Marionettes: A System and Paradigm for Real-Time 3D Animation Adi Bar-Lev, Alfred M. Bruckstein, Gershon Elber Computer Science Department Technion, I.I.T. 32000 Haifa, Israel Abstract This paper
Appendix A Physiological Model of the Elbow in MATLAB/Simulink
 Appendix A Physiological Model of the Elbow in MATLAB/Simulink This section contains a complete description of the implementation of the physiological model of the elbow joint in the MATLAB/Simulink environment.
Appendix A Physiological Model of the Elbow in MATLAB/Simulink This section contains a complete description of the implementation of the physiological model of the elbow joint in the MATLAB/Simulink environment.
The jello cube. Undeformed cube. Deformed cube
 The Jello Cube Assignment 1, CSCI 520 Jernej Barbic, USC Undeformed cube The jello cube Deformed cube The jello cube is elastic, Can be bent, stretched, squeezed,, Without external forces, it eventually
The Jello Cube Assignment 1, CSCI 520 Jernej Barbic, USC Undeformed cube The jello cube Deformed cube The jello cube is elastic, Can be bent, stretched, squeezed,, Without external forces, it eventually
Research on time optimal trajectory planning of 7-DOF manipulator based on genetic algorithm
 Acta Technica 61, No. 4A/2016, 189 200 c 2017 Institute of Thermomechanics CAS, v.v.i. Research on time optimal trajectory planning of 7-DOF manipulator based on genetic algorithm Jianrong Bu 1, Junyan
Acta Technica 61, No. 4A/2016, 189 200 c 2017 Institute of Thermomechanics CAS, v.v.i. Research on time optimal trajectory planning of 7-DOF manipulator based on genetic algorithm Jianrong Bu 1, Junyan
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis
 Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
Anatomy of a Physics Engine. Erwin Coumans
 Anatomy of a Physics Engine Erwin Coumans erwin_coumans@playstation.sony.com How it fits together» Terminology» Rigid Body Dynamics» Collision Detection» Software Design Decisions» Trip through the Physics
Anatomy of a Physics Engine Erwin Coumans erwin_coumans@playstation.sony.com How it fits together» Terminology» Rigid Body Dynamics» Collision Detection» Software Design Decisions» Trip through the Physics
AC : AN ALTERNATIVE APPROACH FOR TEACHING MULTIBODY DYNAMICS
 AC 2009-575: AN ALTERNATIVE APPROACH FOR TEACHING MULTIBODY DYNAMICS George Sutherland, Rochester Institute of Technology DR. GEORGE H. SUTHERLAND is a professor in the Manufacturing & Mechanical Engineering
AC 2009-575: AN ALTERNATIVE APPROACH FOR TEACHING MULTIBODY DYNAMICS George Sutherland, Rochester Institute of Technology DR. GEORGE H. SUTHERLAND is a professor in the Manufacturing & Mechanical Engineering
Structure and Synthesis of Robot Motion
 Structure and Synthesis of Robot Motion Dynamics: Constraints, Continua, etc. Subramanian Ramamoorthy School of Informatics 5 February, 2009 Recap Last time, we discussed two major approaches to describing
Structure and Synthesis of Robot Motion Dynamics: Constraints, Continua, etc. Subramanian Ramamoorthy School of Informatics 5 February, 2009 Recap Last time, we discussed two major approaches to describing
Solution for Euler Equations Lagrangian and Eulerian Descriptions
 Solution for Euler Equations Lagrangian and Eulerian Descriptions Valdir Monteiro dos Santos Godoi valdir.msgodoi@gmail.com Abstract We find an exact solution for the system of Euler equations, following
Solution for Euler Equations Lagrangian and Eulerian Descriptions Valdir Monteiro dos Santos Godoi valdir.msgodoi@gmail.com Abstract We find an exact solution for the system of Euler equations, following
[3] Rigid Body Analysis
![[3] Rigid Body Analysis](/thumbs/92/109073357.jpg "[3] Rigid Body Analysis") [3] Rigid Body Analysis Page 1 of 53 [3] Rigid Body Analysis [3.1] Equilibrium of a Rigid Body [3.2] Equations of Equilibrium [3.3] Equilibrium in 3-D [3.4] Simple Trusses [3.5] The Method of Joints [3.6]
[3] Rigid Body Analysis Page 1 of 53 [3] Rigid Body Analysis [3.1] Equilibrium of a Rigid Body [3.2] Equations of Equilibrium [3.3] Equilibrium in 3-D [3.4] Simple Trusses [3.5] The Method of Joints [3.6]