Shape and deformation measurements by high-resolution fringe projection methods February 2018
|
|
|
- Colin Underwood
- 6 years ago
- Views:
Transcription

1 Shape and deformation measurements by high-resolution fringe projection methods February 2018
2 Outline Motivation System setup Principles of operation Calibration Applications Conclusions & Future work




3 Motivation Advance current methods for quantitative data collection using a non-contact, robust technique, applicable to a wide range of applications. Art Conservation Range Mobility Resolution Accuracy Criterion Crack Propagation Versatility Ease-of-Use Time

")



4 System Setup 1. Single Frame Fringe Projection (High-speed Fringe Projection) - a near-ir light source, an optical imaging device, and a near infrared sensitive digital charged-couple device (CCD) camera. LED θ A O I PC

 Ref.")


5 Digital Micromirror Device (DMD TM ) Ref. Texas Instruments Close-up of chip surface Ants Foot 20 mm

6 Digital Micromirror Device

7 Digital Micromirror Device
8 Digital Micromirror Device

9 Digital Micromirror Device

")



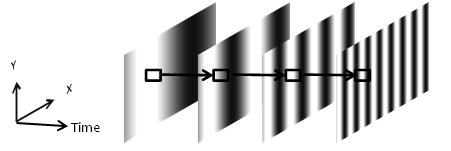
10 System Setup 2. Structured light projection with phase shifting - A spatial light modulator (SLM) and a digital charged-couple device (CCD) camera. The SLM, packaged by Vialux, contains a digital light processing (DLP ) unit from TI MEMS based Sinusoidal Fringe Projection SLM θ A O I 20 mm PC Actual Pattern Projection Sinusoidal Fringe Projection Light Intensity Pixels



 ] i 1 m I m k i cos[ 2 ( i 1)] i 1")
11 Principles of Operation Single Image Analysis DC Component Shape information Ii ( x, Recorded Intensity distribution bi ( x, Image Contrast ai ( x, Image Brightness FFT IMAG( x, ( x, arctan REAL( x, METHOD MATHEMATICS i( x, ( x,, Multiple Image Analysis Ii ( x, ai ( x, bi( x, cos i i( x, ( x, i Random phase Fringe Locus Function Induced phase shift ( x, arctan m m Ii sin[ 2 m k ( i 1) ] i 1 m I m k i cos[ 2 ( i 1)] i 1 Arctangent is a discontinuous function



12 Principles of Operation - Unwrapping Temporal phase unwrapping: u i1 ( x, i1 ( x, 2N i1




13 Principles of Operation - Unwrapping Spatial phase unwrapping: Difference between neighboring pixel FFT Base on regions orders Determine 2 Filter Phase information Mod ( x, inverse FFT Wrapped phase arctan Spatial unwrapping IMAG( x, REAL( x, Unwrapping Scale x, ( x, 2k i, j ( i, j


![5 intrinsic parameters [A] and extrinsic parameters [R t]](/docs-images/77/75618957/images/14-4.jpg "are computed. 1. Z.")



14 C ), ( 0 u 0 v α z y x M ), ( t R m M t R A m t r r r ~ ~ z y x v u v u s Homography matrices are estimated in MATLAB using nonlinear method of maximum likelihood estimation. 5 intrinsic parameters [A] and extrinsic parameters [R t] are computed. 1. Z. Zhang, A flexible new technique for camera calibration, IEEE Transactions on Pattern analysis and machine intelligence, 2000, pp Removing lens distortion by camera calibration Pinhole camera model: Pinhole method is used to obtain intrinsic and extrinsic parameters of camera A planar checkerboard is shown under 20 different orientations and the grid corners of the image are extracted. Extrinsic parameters Error [pixel]

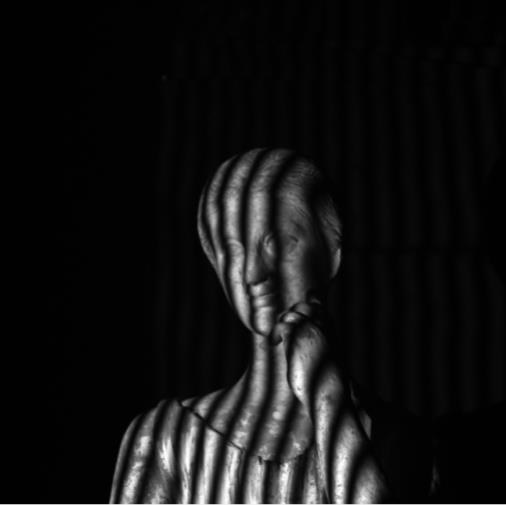
15 Range Application Sculpture Digitization System Setup Ease-of-Use Resolution Accuracy Versatility Criterion Sculpture titled Funeral of a Young Maiden Casona, South Italy. Late 4 th Century BCE Optimization of setup for sculpture digitization.75 m Schematic of sculpture digitization setup Measurement System Rotational Stage



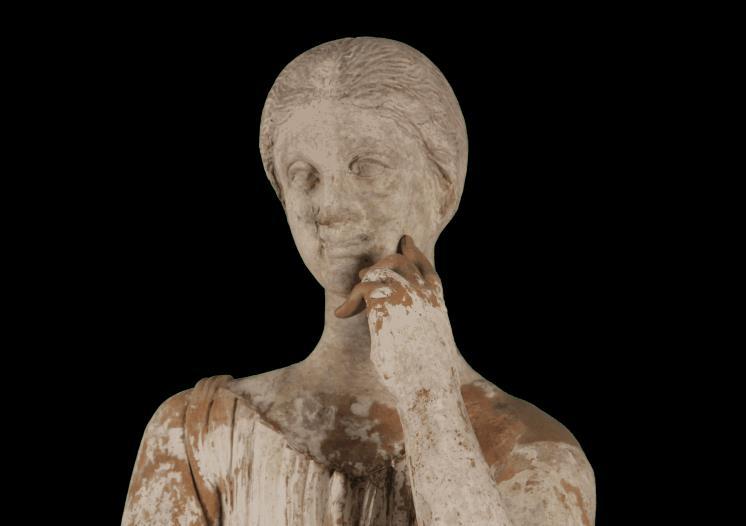
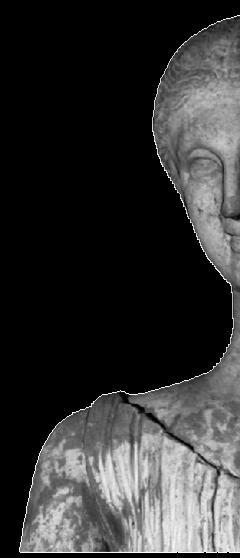

16 Representative Results Approximate x resolution =.015 in. Approximate y resolution =.015 in Approximate z resolution = in.. A 0 ⁰ 180 ⁰ A



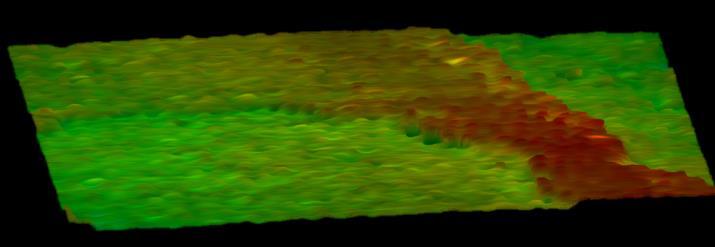
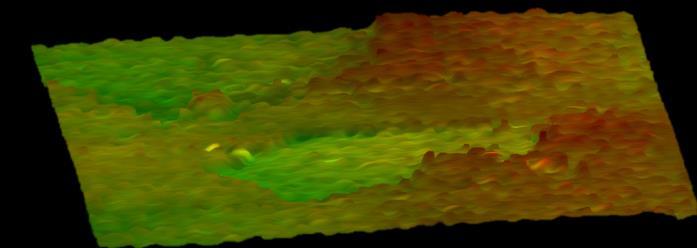
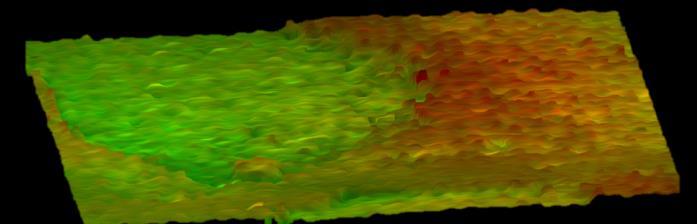
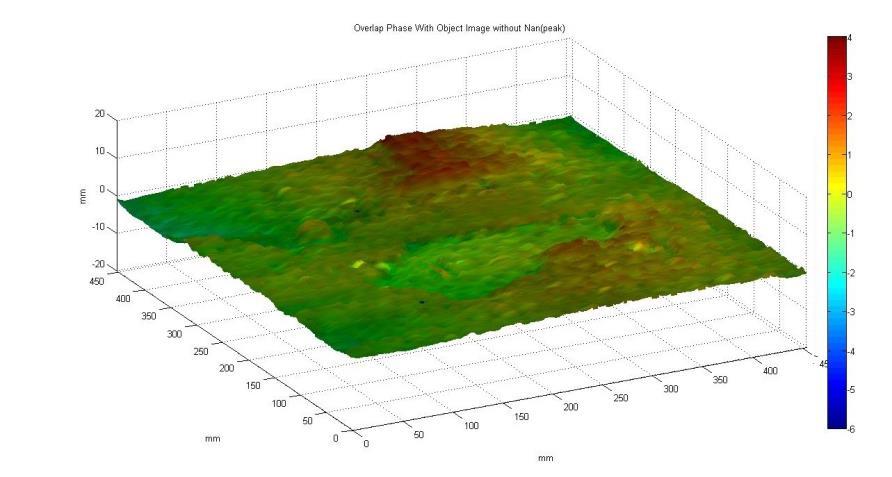
17 Application Shape and Deformation Measurements on a Canvas The object under test is a 4150 cm 2 painting on canvas. The painting is subjected to an airflow of a fan at the distance of 0.5 m from the painting Original image Lens distortion removed image Perspective removed image 10 cm 3D Shape 3D Shape 2 mm The distance from projector to object is 1.75 m, and the field of view is 500X500 mm 2. -8



 0 The distance from")
18 Application Shape and Deformation Measurements on a Canvas The object under test is a 4150 cm 2 painting on canvas. The painting is subjected to an airflow of a fan at the distance of 0.5 m from the painting Canvas under airflow phase (time 1) phase (time 2) 10 cm 3D deformation 1.5 mm phase (time 2) 0 The distance from projector to object is 1.75 m, and the field of view is 500X500 mm 2.



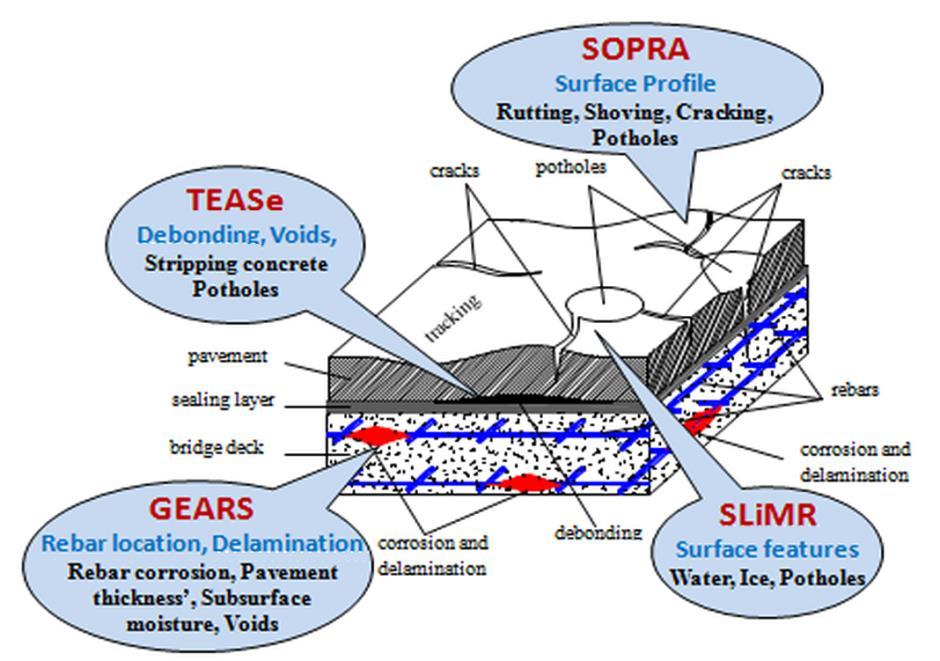
19 Application of Single Frame Projection- Surface Road Measurements * Courtesy of VOTERS website



20 SOPRA Surface Optical Profilometry Roadway Analysis Normalized sunlight spectrum under sunny day condition measured on March 10,16:44 EST Projector Cooler system Ronchi ruling grating Near-Infrared light source Camera Near-Infrared sensitive camera Bandpass Interference Filter, Near-IR Normalized Near-Infrared light source spectrum under lab condition measured on March 10,16:57 EST




21 Time Range Mobility Accuracy Application of Single Frame Projection- Surface Road Measurements Van Setup Primary Criterion Requirement Z resolution: mm Approximate x resolution at distance 1.75 from the system to the ground = 0.38 mm. Approximate z resolution = 0.4 mm.




, (b) and (c),")

, (f) and (g), 3D")
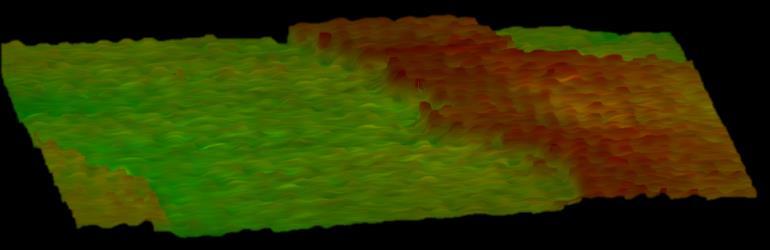
22 Dynamic results of measurements of different RI surface The different RI under test at speed of 20 miles/hr, exposure time 253 um, gain value 33, the field of view mm 2. (a), (b) and (c), Fringes projected on the different RI condition objects; (e), (f) and (g), 3D model respectively. (a) (b) (c) (e) (f) (g)


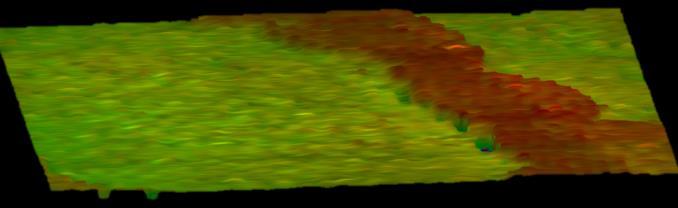

23 Dynamic results of measurements of road surface Measurement results of consecutive images analyzed using FFT methods. Measurements done at 20 miles/hr Y Z X the video of the dynamic results the image of road
WORCESTER POLYTECHNIC INSTITUTE
 WORCESTER POLYTECHNIC INSTITUTE MECHANICAL ENGINEERING DEPARTMENT Optical Metrology and NDT ME-593L, C 2018 Lecture 03 January 2018 Lasers sources Some operating characteristics: laser modes Schematic
WORCESTER POLYTECHNIC INSTITUTE MECHANICAL ENGINEERING DEPARTMENT Optical Metrology and NDT ME-593L, C 2018 Lecture 03 January 2018 Lasers sources Some operating characteristics: laser modes Schematic
An Innovative Three-dimensional Profilometer for Surface Profile Measurement Using Digital Fringe Projection and Phase Shifting
 An Innovative Three-dimensional Profilometer for Surface Profile Measurement Using Digital Fringe Projection and Phase Shifting Liang-Chia Chen 1, Shien-Han Tsai 1 and Kuang-Chao Fan 2 1 Institute of Automation
An Innovative Three-dimensional Profilometer for Surface Profile Measurement Using Digital Fringe Projection and Phase Shifting Liang-Chia Chen 1, Shien-Han Tsai 1 and Kuang-Chao Fan 2 1 Institute of Automation
High-resolution 3D profilometry with binary phase-shifting methods
 High-resolution 3D profilometry with binary phase-shifting methods Song Zhang Department of Mechanical Engineering, Iowa State University, Ames, Iowa 511, USA (song@iastate.edu) Received 11 November 21;
High-resolution 3D profilometry with binary phase-shifting methods Song Zhang Department of Mechanical Engineering, Iowa State University, Ames, Iowa 511, USA (song@iastate.edu) Received 11 November 21;
Accurate projector calibration method by using an optical coaxial camera
 Accurate projector calibration method by using an optical coaxial camera Shujun Huang, 1 Lili Xie, 1 Zhangying Wang, 1 Zonghua Zhang, 1,3, * Feng Gao, 2 and Xiangqian Jiang 2 1 School of Mechanical Engineering,
Accurate projector calibration method by using an optical coaxial camera Shujun Huang, 1 Lili Xie, 1 Zhangying Wang, 1 Zonghua Zhang, 1,3, * Feng Gao, 2 and Xiangqian Jiang 2 1 School of Mechanical Engineering,
Supplementary materials of Multispectral imaging using a single bucket detector
 Supplementary materials of Multispectral imaging using a single bucket detector Liheng Bian 1, Jinli Suo 1,, Guohai Situ 2, Ziwei Li 1, Jingtao Fan 1, Feng Chen 1 and Qionghai Dai 1 1 Department of Automation,
Supplementary materials of Multispectral imaging using a single bucket detector Liheng Bian 1, Jinli Suo 1,, Guohai Situ 2, Ziwei Li 1, Jingtao Fan 1, Feng Chen 1 and Qionghai Dai 1 1 Department of Automation,
Phase error correction based on Inverse Function Shift Estimation in Phase Shifting Profilometry using a digital video projector
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Phase error correction based on Inverse Function Shift Estimation
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Phase error correction based on Inverse Function Shift Estimation
Error analysis for 3D shape measurement with projector defocusing
 Mechanical Engineering Conference Presentations, Papers, and Proceedings Mechanical Engineering 1-21 Error analysis for 3D shape measurement with projector defocusing Ying Xu Iowa State University Junfei
Mechanical Engineering Conference Presentations, Papers, and Proceedings Mechanical Engineering 1-21 Error analysis for 3D shape measurement with projector defocusing Ying Xu Iowa State University Junfei
Robot Vision: Camera calibration
 Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
This document contains the draft version of the following paper:
 This document contains the draft version of the following paper: T. Peng and S.K. Gupta. Model and algorithms for point cloud construction using digital projection patterns. ASME Journal of Computing and
This document contains the draft version of the following paper: T. Peng and S.K. Gupta. Model and algorithms for point cloud construction using digital projection patterns. ASME Journal of Computing and
Draft SPOTS Standard Part III (7)
") SPOTS Good Practice Guide to Electronic Speckle Pattern Interferometry for Displacement / Strain Analysis Draft SPOTS Standard Part III (7) CALIBRATION AND ASSESSMENT OF OPTICAL STRAIN MEASUREMENTS Good
SPOTS Good Practice Guide to Electronic Speckle Pattern Interferometry for Displacement / Strain Analysis Draft SPOTS Standard Part III (7) CALIBRATION AND ASSESSMENT OF OPTICAL STRAIN MEASUREMENTS Good
Projector Calibration for Pattern Projection Systems
 Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
Dynamic 3-D surface profilometry using a novel color pattern encoded with a multiple triangular model
 Dynamic 3-D surface profilometry using a novel color pattern encoded with a multiple triangular model Liang-Chia Chen and Xuan-Loc Nguyen Graduate Institute of Automation Technology National Taipei University
Dynamic 3-D surface profilometry using a novel color pattern encoded with a multiple triangular model Liang-Chia Chen and Xuan-Loc Nguyen Graduate Institute of Automation Technology National Taipei University
Metrology and Sensing
 Metrology and Sensing Lecture 4: Fringe projection 2016-11-08 Herbert Gross Winter term 2016 www.iap.uni-jena.de 2 Preliminary Schedule No Date Subject Detailed Content 1 18.10. Introduction Introduction,
Metrology and Sensing Lecture 4: Fringe projection 2016-11-08 Herbert Gross Winter term 2016 www.iap.uni-jena.de 2 Preliminary Schedule No Date Subject Detailed Content 1 18.10. Introduction Introduction,
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware
 Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Coherent Gradient Sensing Microscopy: Microinterferometric Technique. for Quantitative Cell Detection
 Coherent Gradient Sensing Microscopy: Microinterferometric Technique for Quantitative Cell Detection Proceedings of the SEM Annual Conference June 7-10, 010 Indianapolis, Indiana USA 010 Society for Experimental
Coherent Gradient Sensing Microscopy: Microinterferometric Technique for Quantitative Cell Detection Proceedings of the SEM Annual Conference June 7-10, 010 Indianapolis, Indiana USA 010 Society for Experimental
A Flexible Fringe Projection Vision System with Extended Mathematical Model for Accurate Three-Dimensional Measurement
 sensors Article A Flexible Fringe Projection Vision System with Extended Mathematical Model for Accurate Three-Dimensional Measurement Suzhi Xiao, Wei Tao * and Hui Zhao School of Electronic Information
sensors Article A Flexible Fringe Projection Vision System with Extended Mathematical Model for Accurate Three-Dimensional Measurement Suzhi Xiao, Wei Tao * and Hui Zhao School of Electronic Information
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Full-field optical methods for mechanical engineering: essential concepts to find one way
 Full-field optical methods for mechanical engineering: essential concepts to find one way Yves Surrel Techlab September 2004 1 Contents 1 Introduction 3 2 White light methods 4 2.1 Random encoding............................................
Full-field optical methods for mechanical engineering: essential concepts to find one way Yves Surrel Techlab September 2004 1 Contents 1 Introduction 3 2 White light methods 4 2.1 Random encoding............................................
3D Computer Vision. Structured Light I. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Metrology and Sensing
 Metrology and Sensing Lecture 4: Fringe projection 2018-11-09 Herbert Gross Winter term 2018 www.iap.uni-jena.de 2 Schedule Optical Metrology and Sensing 2018 No Date Subject Detailed Content 1 16.10.
Metrology and Sensing Lecture 4: Fringe projection 2018-11-09 Herbert Gross Winter term 2018 www.iap.uni-jena.de 2 Schedule Optical Metrology and Sensing 2018 No Date Subject Detailed Content 1 16.10.
EECS 4330/7330 Introduction to Mechatronics and Robotic Vision, Fall Lab 1. Camera Calibration
 1 Lab 1 Camera Calibration Objective In this experiment, students will use stereo cameras, an image acquisition program and camera calibration algorithms to achieve the following goals: 1. Develop a procedure
1 Lab 1 Camera Calibration Objective In this experiment, students will use stereo cameras, an image acquisition program and camera calibration algorithms to achieve the following goals: 1. Develop a procedure
High-speed three-dimensional shape measurement system using a modified two-plus-one phase-shifting algorithm
 46 11, 113603 November 2007 High-speed three-dimensional shape measurement system using a modified two-plus-one phase-shifting algorithm Song Zhang, MEMBER SPIE Shing-Tung Yau Harvard University Department
46 11, 113603 November 2007 High-speed three-dimensional shape measurement system using a modified two-plus-one phase-shifting algorithm Song Zhang, MEMBER SPIE Shing-Tung Yau Harvard University Department
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Improved phase-unwrapping method using geometric constraints
 Improved phase-unwrapping method using geometric constraints Guangliang Du 1, Min Wang 1, Canlin Zhou 1*,Shuchun Si 1, Hui Li 1, Zhenkun Lei 2,Yanjie Li 3 1 School of Physics, Shandong University, Jinan
Improved phase-unwrapping method using geometric constraints Guangliang Du 1, Min Wang 1, Canlin Zhou 1*,Shuchun Si 1, Hui Li 1, Zhenkun Lei 2,Yanjie Li 3 1 School of Physics, Shandong University, Jinan
Automated calibration of multi-camera-projector structured light systems for volumetric high-speed 3D surface reconstructions
 Vol. 26, No. 25 10 Dec 2018 OPTICS EXPRESS 33278 Automated calibration of multi-camera-projector structured light systems for volumetric high-speed 3D surface reconstructions M ARC E. D EETJEN 1,2 1 Mechanical
Vol. 26, No. 25 10 Dec 2018 OPTICS EXPRESS 33278 Automated calibration of multi-camera-projector structured light systems for volumetric high-speed 3D surface reconstructions M ARC E. D EETJEN 1,2 1 Mechanical
Agenda. DLP 3D scanning Introduction DLP 3D scanning SDK Introduction Advance features for existing SDK
 Agenda DLP 3D scanning Introduction DLP 3D scanning SDK Introduction Advance features for existing SDK Increasing scanning speed from 20Hz to 400Hz Improve the lost point cloud 3D Machine Vision Applications:
Agenda DLP 3D scanning Introduction DLP 3D scanning SDK Introduction Advance features for existing SDK Increasing scanning speed from 20Hz to 400Hz Improve the lost point cloud 3D Machine Vision Applications:
Optics and Lasers in Engineering
 Optics and Lasers in Engineering 51 (213) 79 795 Contents lists available at SciVerse ScienceDirect Optics and Lasers in Engineering journal homepage: www.elsevier.com/locate/optlaseng Phase-optimized
Optics and Lasers in Engineering 51 (213) 79 795 Contents lists available at SciVerse ScienceDirect Optics and Lasers in Engineering journal homepage: www.elsevier.com/locate/optlaseng Phase-optimized
Comparative study on passive and active projector nonlinear gamma calibration
 3834 Vol. 54, No. 13 / May 1 2015 / Applied Optics Research Article Comparative study on passive and active projector nonlinear gamma calibration SONG ZHANG School of Mechanical Engineering, Purdue University,
3834 Vol. 54, No. 13 / May 1 2015 / Applied Optics Research Article Comparative study on passive and active projector nonlinear gamma calibration SONG ZHANG School of Mechanical Engineering, Purdue University,
Metrology and Sensing
 Metrology and Sensing Lecture 4: Fringe projection 2017-11-09 Herbert Gross Winter term 2017 www.iap.uni-jena.de 2 Preliminary Schedule No Date Subject Detailed Content 1 19.10. Introduction Introduction,
Metrology and Sensing Lecture 4: Fringe projection 2017-11-09 Herbert Gross Winter term 2017 www.iap.uni-jena.de 2 Preliminary Schedule No Date Subject Detailed Content 1 19.10. Introduction Introduction,
Natural method for three-dimensional range data compression
 Natural method for three-dimensional range data compression Pan Ou,2 and Song Zhang, * Department of Mechanical Engineering, Iowa State University, Ames, Iowa 5, USA 2 School of Instrumentation Science
Natural method for three-dimensional range data compression Pan Ou,2 and Song Zhang, * Department of Mechanical Engineering, Iowa State University, Ames, Iowa 5, USA 2 School of Instrumentation Science
Embedded Phase Shifting: Robust Phase Shifting with Embedded Signals
 Embedded Phase Shifting: Robust Phase Shifting with Embedded Signals Daniel Moreno Kilho Son Gabriel Taubin Brown University, Providence, RI, USA {daniel moreno, kilho son, gabriel taubin}@brown.edu Abstract
Embedded Phase Shifting: Robust Phase Shifting with Embedded Signals Daniel Moreno Kilho Son Gabriel Taubin Brown University, Providence, RI, USA {daniel moreno, kilho son, gabriel taubin}@brown.edu Abstract
Time-resolved wavelet- based acquisitions using a single pixel camera
 Florian Rousset 1,2, Nicolas Ducros 1, Andrea Farina 2, Gianluca Valentini 2, Cosimo D Andrea 2, Françoise Peyrin 1 1 Univ Lyon, INSA Lyon, CNRS 5220, INSERM U1206, CREATIS Lyon, France 2 Politecnico di
Florian Rousset 1,2, Nicolas Ducros 1, Andrea Farina 2, Gianluca Valentini 2, Cosimo D Andrea 2, Françoise Peyrin 1 1 Univ Lyon, INSA Lyon, CNRS 5220, INSERM U1206, CREATIS Lyon, France 2 Politecnico di
Optimal checkerboard selection for structured light system calibration
 Mechanical Engineering Conference Presentations, Papers, and Proceedings Mechanical Engineering 8-2009 Optimal checkerboard selection for structured light system calibration William F. Lohry Iowa State
Mechanical Engineering Conference Presentations, Papers, and Proceedings Mechanical Engineering 8-2009 Optimal checkerboard selection for structured light system calibration William F. Lohry Iowa State
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
Shift estimation method based fringe pattern profilometry and performance comparison
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2005 Shift estimation method based fringe pattern profilometry and performance
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2005 Shift estimation method based fringe pattern profilometry and performance
Epipolar Geometry in Stereo, Motion and Object Recognition
 Epipolar Geometry in Stereo, Motion and Object Recognition A Unified Approach by GangXu Department of Computer Science, Ritsumeikan University, Kusatsu, Japan and Zhengyou Zhang INRIA Sophia-Antipolis,
Epipolar Geometry in Stereo, Motion and Object Recognition A Unified Approach by GangXu Department of Computer Science, Ritsumeikan University, Kusatsu, Japan and Zhengyou Zhang INRIA Sophia-Antipolis,
Zuo, Chao; Chen, Qian; Feng, Shijie; Gu, Guohua; Asundi, Anand.
 Title projection profilometry Author(s) Citation Zuo, Chao; Chen, Qian; Feng, Shijie; Gu, Guohua; Asundi, Anand Zuo, C., Chen, Q., Feng, S., Gu, G., & Asundi, A. (2013). projection prof ilometry. Chinese
Title projection profilometry Author(s) Citation Zuo, Chao; Chen, Qian; Feng, Shijie; Gu, Guohua; Asundi, Anand Zuo, C., Chen, Q., Feng, S., Gu, G., & Asundi, A. (2013). projection prof ilometry. Chinese
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Enhanced two-frequency phase-shifting method
 Research Article Vol. 55, No. 16 / June 1 016 / Applied Optics 4395 Enhanced two-frequency phase-shifting method JAE-SANG HYUN AND SONG ZHANG* School of Mechanical Engineering, Purdue University, West
Research Article Vol. 55, No. 16 / June 1 016 / Applied Optics 4395 Enhanced two-frequency phase-shifting method JAE-SANG HYUN AND SONG ZHANG* School of Mechanical Engineering, Purdue University, West
3D Shape Acquisition Using an FTP-based Method in Product Modeling
 3D Shape Acquisition Using an FTP-based Method in Product Modeling Chunsheng Yu Department of Mechanical and Manufacturing Engineering University of Manitoba, Winnipeg, Manitoba, R3T 5V6, Canada umyuc1@cc.umanitoba.ca
3D Shape Acquisition Using an FTP-based Method in Product Modeling Chunsheng Yu Department of Mechanical and Manufacturing Engineering University of Manitoba, Winnipeg, Manitoba, R3T 5V6, Canada umyuc1@cc.umanitoba.ca
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Computer Vision. Coordinates. Prof. Flávio Cardeal DECOM / CEFET- MG.
 Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Transparent Object Shape Measurement Based on Deflectometry
 Proceedings Transparent Object Shape Measurement Based on Deflectometry Zhichao Hao and Yuankun Liu * Opto-Electronics Department, Sichuan University, Chengdu 610065, China; 2016222055148@stu.scu.edu.cn
Proceedings Transparent Object Shape Measurement Based on Deflectometry Zhichao Hao and Yuankun Liu * Opto-Electronics Department, Sichuan University, Chengdu 610065, China; 2016222055148@stu.scu.edu.cn
High-speed, high-accuracy 3D shape measurement based on binary color fringe defocused projection
 J. Eur. Opt. Soc.-Rapid 1, 1538 (215) www.jeos.org High-speed, high-accuracy 3D shape measurement based on binary color fringe defocused projection B. Li Key Laboratory of Nondestructive Testing (Ministry
J. Eur. Opt. Soc.-Rapid 1, 1538 (215) www.jeos.org High-speed, high-accuracy 3D shape measurement based on binary color fringe defocused projection B. Li Key Laboratory of Nondestructive Testing (Ministry
Coherent digital demodulation of single-camera N-projections for 3D-object shape measurement: Co-phased profilometry
 Coherent digital demodulation of single-camera N-projections for 3D-object shape measurement: Co-phased profilometry M. Servin, 1,* G. Garnica, 1 J. C. Estrada, 1 and A. Quiroga 2 1 Centro de Investigaciones
Coherent digital demodulation of single-camera N-projections for 3D-object shape measurement: Co-phased profilometry M. Servin, 1,* G. Garnica, 1 J. C. Estrada, 1 and A. Quiroga 2 1 Centro de Investigaciones
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
3-D D Euclidean Space - Vectors
 3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
Outline. Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion. Media IC & System Lab Po-Chen Wu 2
 Outline Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion Media IC & System Lab Po-Chen Wu 2 Outline Introduction System Overview Camera Calibration
Outline Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion Media IC & System Lab Po-Chen Wu 2 Outline Introduction System Overview Camera Calibration
ENGN D Photography / Spring 2018 / SYLLABUS
 ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
Extracting Sound Information from High-speed Video Using Three-dimensional Shape Measurement Method
 Extracting Sound Information from High-speed Video Using Three-dimensional Shape Measurement Method Yusei Yamanaka, Kohei Yatabe, Ayumi Nakamura, Yusuke Ikeda and Yasuhiro Oikawa Department of Intermedia
Extracting Sound Information from High-speed Video Using Three-dimensional Shape Measurement Method Yusei Yamanaka, Kohei Yatabe, Ayumi Nakamura, Yusuke Ikeda and Yasuhiro Oikawa Department of Intermedia
Accurate and Simple Calibration of DLP Projector Systems
 Accurate and Simple Calibration of DLP Projector Systems Jakob Wilm,2 and Oline V. Olesen,2 and Rasmus Larsen Department of Applied Mathematics and Computer Science, Technical University of Denmark, Richard
Accurate and Simple Calibration of DLP Projector Systems Jakob Wilm,2 and Oline V. Olesen,2 and Rasmus Larsen Department of Applied Mathematics and Computer Science, Technical University of Denmark, Richard
Dynamic three-dimensional sensing for specular surface with monoscopic fringe reflectometry
 Dynamic three-dimensional sensing for specular surface with monoscopic fringe reflectometry Lei Huang,* Chi Seng Ng, and Anand Krishna Asundi School of Mechanical and Aerospace Engineering, Nanyang Technological
Dynamic three-dimensional sensing for specular surface with monoscopic fringe reflectometry Lei Huang,* Chi Seng Ng, and Anand Krishna Asundi School of Mechanical and Aerospace Engineering, Nanyang Technological
Measurement of Thermally Induced Warpage of BGA Packages/Substrates Using Phase-Stepping Shadow Moiré
 ABSTRACT Measurement of Thermally Induced Warpage of BGA Packages/Substrates Using Phase-Stepping Shadow Moiré Yinyan Wang and Patrick Hassell Electronic Packaging Services, Ltd. Co. 430 Tenth Street,
ABSTRACT Measurement of Thermally Induced Warpage of BGA Packages/Substrates Using Phase-Stepping Shadow Moiré Yinyan Wang and Patrick Hassell Electronic Packaging Services, Ltd. Co. 430 Tenth Street,
Improving Vision-Based Distance Measurements using Reference Objects
 Improving Vision-Based Distance Measurements using Reference Objects Matthias Jüngel, Heinrich Mellmann, and Michael Spranger Humboldt-Universität zu Berlin, Künstliche Intelligenz Unter den Linden 6,
Improving Vision-Based Distance Measurements using Reference Objects Matthias Jüngel, Heinrich Mellmann, and Michael Spranger Humboldt-Universität zu Berlin, Künstliche Intelligenz Unter den Linden 6,
Pixel-wise absolute phase unwrapping using geometric constraints of structured light system
 Vol. 24, No. 15 25 Jul 2016 OPTICS EXPRESS 18445 Piel-wise absolute phase unwrapping using geometric constraints of structured light system YATONG A N, J AE -S ANG H YUN, AND S ONG Z HANG * School of Mechanical
Vol. 24, No. 15 25 Jul 2016 OPTICS EXPRESS 18445 Piel-wise absolute phase unwrapping using geometric constraints of structured light system YATONG A N, J AE -S ANG H YUN, AND S ONG Z HANG * School of Mechanical
Three Dimensional Measurements by Deflectometry and Double Hilbert Transform
 Three Dimensional Measurements by Deflectometry and Double Hilbert Transform Silin Na*, Sanghoon Shin**, Younghun Yu* * Department of Physics, Jeju National University, Jeju, 63243, Korea ** Kanghae Precision
Three Dimensional Measurements by Deflectometry and Double Hilbert Transform Silin Na*, Sanghoon Shin**, Younghun Yu* * Department of Physics, Jeju National University, Jeju, 63243, Korea ** Kanghae Precision
Instance-level recognition I. - Camera geometry and image alignment
 Reconnaissance d objets et vision artificielle 2011 Instance-level recognition I. - Camera geometry and image alignment Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire
Reconnaissance d objets et vision artificielle 2011 Instance-level recognition I. - Camera geometry and image alignment Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire
ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning
 ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 26 February 2009 Figure 1: Structured
ENGN 2911 I: 3D Photography and Geometry Processing Assignment 2: Structured Light for 3D Scanning Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 26 February 2009 Figure 1: Structured
CALIBRATION BETWEEN DEPTH AND COLOR SENSORS FOR COMMODITY DEPTH CAMERAS. Cha Zhang and Zhengyou Zhang
 CALIBRATION BETWEEN DEPTH AND COLOR SENSORS FOR COMMODITY DEPTH CAMERAS Cha Zhang and Zhengyou Zhang Communication and Collaboration Systems Group, Microsoft Research {chazhang, zhang}@microsoft.com ABSTRACT
CALIBRATION BETWEEN DEPTH AND COLOR SENSORS FOR COMMODITY DEPTH CAMERAS Cha Zhang and Zhengyou Zhang Communication and Collaboration Systems Group, Microsoft Research {chazhang, zhang}@microsoft.com ABSTRACT
3,000-fps 3-D Shape Measurement Using a High-Speed Camera-Projector System
 Proceedings of the 2007 IEEE/RSJ International onference on Intelligent Robots and Systems San Diego, A, USA, Oct 29 - Nov 2, 2007 ThB1.4 3,000-fps 3-D Shape Measurement Using a High-Speed amera-projector
Proceedings of the 2007 IEEE/RSJ International onference on Intelligent Robots and Systems San Diego, A, USA, Oct 29 - Nov 2, 2007 ThB1.4 3,000-fps 3-D Shape Measurement Using a High-Speed amera-projector
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
High-resolution, real-time three-dimensional shape measurement
 Iowa State University From the SelectedWorks of Song Zhang December 13, 2006 High-resolution, real-time three-dimensional shape measurement Song Zhang, Harvard University Peisen S. Huang, State University
Iowa State University From the SelectedWorks of Song Zhang December 13, 2006 High-resolution, real-time three-dimensional shape measurement Song Zhang, Harvard University Peisen S. Huang, State University
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
The real voyage of discovery consists not in seeking new landscapes, but in having new eyes.
 The real voyage of discovery consists not in seeking new landscapes, but in having new eyes. - Marcel Proust University of Texas at Arlington Camera Calibration (or Resectioning) CSE 4392-5369 Vision-based
The real voyage of discovery consists not in seeking new landscapes, but in having new eyes. - Marcel Proust University of Texas at Arlington Camera Calibration (or Resectioning) CSE 4392-5369 Vision-based
Temporally-Consistent Phase Unwrapping for a Stereo-Assisted Structured Light System
 Temporally-Consistent Phase Unwrapping for a Stereo-Assisted Structured Light System Ricardo R. Garcia and Avideh Zakhor Department of Electrical Engineering and Computer Science University of California,
Temporally-Consistent Phase Unwrapping for a Stereo-Assisted Structured Light System Ricardo R. Garcia and Avideh Zakhor Department of Electrical Engineering and Computer Science University of California,
Operating Procedure for Horiba Raman Microscope
 Operating Procedure for Horiba Raman Microscope SAFETY Be aware of Laser radiation at all times! Do not remove the covers of the instrument. Components are supplied with 110V electric source. Do not touch
Operating Procedure for Horiba Raman Microscope SAFETY Be aware of Laser radiation at all times! Do not remove the covers of the instrument. Components are supplied with 110V electric source. Do not touch
PARTICLE IMAGE VELOCIMETRY (PIV) AND VOLUMETRIC VELOCIMETRY (V3V) SYSTEMS
 AND VOLUMETRIC VELOCIMETRY (V3V) SYSTEMS") PARTICLE IMAGE VELOCIMETRY (PIV) AND VOLUMETRIC VELOCIMETRY (V3V) SYSTEMS VERSATILE, UPGRADEABLE FLUID MECHANICS MEASUREMENT SOLUTIONS UNDERSTANDING, ACCELERATED FULL SPECTRUM OF GLOBAL VELOCITY SYSTEMS
PARTICLE IMAGE VELOCIMETRY (PIV) AND VOLUMETRIC VELOCIMETRY (V3V) SYSTEMS VERSATILE, UPGRADEABLE FLUID MECHANICS MEASUREMENT SOLUTIONS UNDERSTANDING, ACCELERATED FULL SPECTRUM OF GLOBAL VELOCITY SYSTEMS
A Stereo Machine Vision System for. displacements when it is subjected to elasticplastic
 A Stereo Machine Vision System for measuring three-dimensional crack-tip displacements when it is subjected to elasticplastic deformation Arash Karpour Supervisor: Associate Professor K.Zarrabi Co-Supervisor:
A Stereo Machine Vision System for measuring three-dimensional crack-tip displacements when it is subjected to elasticplastic deformation Arash Karpour Supervisor: Associate Professor K.Zarrabi Co-Supervisor:
IEEE JOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING, VOL. 6, NO. 5, SEPTEMBER
 IEEE JOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING, VOL. 6, NO. 5, SEPTEMBER 2012 411 Consistent Stereo-Assisted Absolute Phase Unwrapping Methods for Structured Light Systems Ricardo R. Garcia, Student
IEEE JOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING, VOL. 6, NO. 5, SEPTEMBER 2012 411 Consistent Stereo-Assisted Absolute Phase Unwrapping Methods for Structured Light Systems Ricardo R. Garcia, Student
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Video Mosaics for Virtual Environments, R. Szeliski. Review by: Christopher Rasmussen
 Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Depth Camera for Mobile Devices
 Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
The main problem of photogrammetry
 Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
CSCI 5980: Assignment #3 Homography
 Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Scene Reconstruction from Uncontrolled Motion using a Low Cost 3D Sensor
 Scene Reconstruction from Uncontrolled Motion using a Low Cost 3D Sensor Pierre Joubert and Willie Brink Applied Mathematics Department of Mathematical Sciences University of Stellenbosch, South Africa
Scene Reconstruction from Uncontrolled Motion using a Low Cost 3D Sensor Pierre Joubert and Willie Brink Applied Mathematics Department of Mathematical Sciences University of Stellenbosch, South Africa
Profilometry for the measurement of three-dimensional object shape using radial basis function, and multi-layer perceptron neural networks
 Profilometry for the measurement of three-dimensional object shape using radial basis function, and multi-layer perceptron neural networks Dinesh Ganotra, Joby Joseph, Kehar Singh* Photonics group, Physics
Profilometry for the measurement of three-dimensional object shape using radial basis function, and multi-layer perceptron neural networks Dinesh Ganotra, Joby Joseph, Kehar Singh* Photonics group, Physics
3D data merging using Holoimage
 Iowa State University From the SelectedWorks of Song Zhang September, 27 3D data merging using Holoimage Song Zhang, Harvard University Shing-Tung Yau, Harvard University Available at: https://works.bepress.com/song_zhang/34/
Iowa State University From the SelectedWorks of Song Zhang September, 27 3D data merging using Holoimage Song Zhang, Harvard University Shing-Tung Yau, Harvard University Available at: https://works.bepress.com/song_zhang/34/
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
DEVELOPMENT OF LARGE SCALE STRUCTURED LIGHT BASED MEASUREMENT SYSTEMS
 DEVELOPMENT OF LARGE SCALE STRUCTURED LIGHT BASED MEASUREMENT SYSTEMS By Chi Zhang A DISSERTATION Submitted to Michigan State University in partial fulfillment of the requirements for the degree of DOCTOR
DEVELOPMENT OF LARGE SCALE STRUCTURED LIGHT BASED MEASUREMENT SYSTEMS By Chi Zhang A DISSERTATION Submitted to Michigan State University in partial fulfillment of the requirements for the degree of DOCTOR
Phase error compensation for three-dimensional shape measurement with projector defocusing
 Mechanical Engineering Publications Mechanical Engineering 6-10-2011 Phase error compensation for three-dimensional shape measurement with projector defocusing Ying Xu Iowa State University Laura D. Ekstrand
Mechanical Engineering Publications Mechanical Engineering 6-10-2011 Phase error compensation for three-dimensional shape measurement with projector defocusing Ying Xu Iowa State University Laura D. Ekstrand
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Design, Development, and Calibration of a 3D Sensory System for Surface Profiling of 3D Micro-Scale Parts
 Design, Development, and Calibration of a 3D Sensory System for Surface Profiling of 3D Micro-Scale Parts by Wei-Hao Chang A thesis submitted in conformity with the requirements for the degree of Masters
Design, Development, and Calibration of a 3D Sensory System for Surface Profiling of 3D Micro-Scale Parts by Wei-Hao Chang A thesis submitted in conformity with the requirements for the degree of Masters
High quality three-dimensional (3D) shape measurement using intensity-optimized dithering technique
 shape measurement using intensity-optimized dithering technique") Graduate Theses and Dissertations Iowa State University Capstones, Theses and Dissertations 2014 High quality three-dimensional (3D) shape measurement using intensity-optimized dithering technique Beiwen
Graduate Theses and Dissertations Iowa State University Capstones, Theses and Dissertations 2014 High quality three-dimensional (3D) shape measurement using intensity-optimized dithering technique Beiwen
Method for improving sinusoidal quality of error diffusion binary encoded fringe used in phase measurement profilometry
 Optica Applicata, Vol. XLVI, No. 2, 216 DOI: 1.5277/oa16213 Method for improving sinusoidal quality of error diffusion binary encoded fringe used in phase measurement profilometry ZIXIA TIAN, WENJING CHEN
Optica Applicata, Vol. XLVI, No. 2, 216 DOI: 1.5277/oa16213 Method for improving sinusoidal quality of error diffusion binary encoded fringe used in phase measurement profilometry ZIXIA TIAN, WENJING CHEN
Motion Analysis Methods. Gerald Smith
 Motion Analysis Methods Gerald Smith Measurement Activity: How accurately can the diameter of a golf ball and a koosh ball be measured? Diameter? 1 What is the diameter of a golf ball? What errors are
Motion Analysis Methods Gerald Smith Measurement Activity: How accurately can the diameter of a golf ball and a koosh ball be measured? Diameter? 1 What is the diameter of a golf ball? What errors are
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
Performance Study of Quaternion and Matrix Based Orientation for Camera Calibration
 Performance Study of Quaternion and Matrix Based Orientation for Camera Calibration Rigoberto Juarez-Salazar 1, Carlos Robledo-Sánchez 2, Fermín Guerrero-Sánchez 2, J. Jacobo Oliveros-Oliveros 2, C. Meneses-Fabian
Performance Study of Quaternion and Matrix Based Orientation for Camera Calibration Rigoberto Juarez-Salazar 1, Carlos Robledo-Sánchez 2, Fermín Guerrero-Sánchez 2, J. Jacobo Oliveros-Oliveros 2, C. Meneses-Fabian
Eye tracking by image processing for helping disabled people. Alireza Rahimpour
 An Introduction to: Eye tracking by image processing for helping disabled people Alireza Rahimpour arahimpo@utk.edu Fall 2012 1 Eye tracking system: Nowadays eye gaze tracking has wide range of applications
An Introduction to: Eye tracking by image processing for helping disabled people Alireza Rahimpour arahimpo@utk.edu Fall 2012 1 Eye tracking system: Nowadays eye gaze tracking has wide range of applications
Three-dimensional nondestructive evaluation of cylindrical objects (pipe) using an infrared camera coupled to a 3D scanner
 using an infrared camera coupled to a 3D scanner") Three-dimensional nondestructive evaluation of cylindrical objects (pipe) using an infrared camera coupled to a 3D scanner F. B. Djupkep Dizeu, S. Hesabi, D. Laurendeau, A. Bendada Computer Vision and
Three-dimensional nondestructive evaluation of cylindrical objects (pipe) using an infrared camera coupled to a 3D scanner F. B. Djupkep Dizeu, S. Hesabi, D. Laurendeau, A. Bendada Computer Vision and