Introduction to Mobile Robotics Probabilistic Motion Models
|
|
|
- Laurel Richard
- 6 years ago
- Views:
Transcription


1 Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard, Michael Ruhnke, Bastian Steder 1


2 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty?

3 Dynamic Bayesian Network for Controls, States, and Sensations 3
4 Probabilistic Motion Models To implement the Bayes Filter, we need the transition model. The term specifies a posterior probability, that action u t carries the robot from x t-1 to x t. In this section we will discuss, how can be modeled based on the motion equations and the uncertain outcome of the movements. 4
5 Coordinate Systems The configuration of a typical wheeled robot in 3D can be described by six parameters. This are the three-dimensional Cartesian coordinates plus the three Euler angles for roll, pitch, and yaw. For simplicity, throughout this section we consider robots operating on a planar surface. The state space of such systems is threedimensional (x,y,). 5
6 Typical Motion Models In practice, one often finds two types of motion models: Odometry-based Velocity-based (dead reckoning) Odometry-based models are used when systems are equipped with wheel encoders. Velocity-based models have to be applied when no wheel encoders are given. They calculate the new pose based on the velocities and the time elapsed. 6


7 Example Wheel Encoders These modules provide +5V output when they "see" white, and a 0V output when they "see" black. These disks are manufactured out of high quality laminated color plastic to offer a very crisp black to white transition. This enables a wheel encoder sensor to easily see the transitions. Source: 7

8 Dead Reckoning Derived from deduced reckoning. Mathematical procedure for determining the present location of a vehicle. Achieved by calculating the current pose of the vehicle based on its velocities and the time elapsed. Historically used to log the position of ships. [Image source: Wikipedia, LoKiLeCh] 8
9 Reasons for Motion Errors of Wheeled Robots ideal case different wheel diameters bump and many more carpet 9
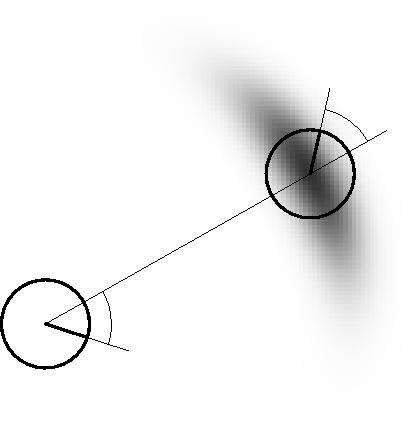
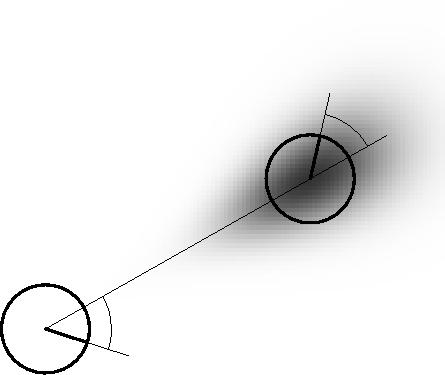
10 Odometry Model Robot moves from x, y, to x ', y ', '. Odometry information u,., rot 1 rot trans trans ( x ' x ) ( y ' y ) atan ( y ' y, x ' ) x rot 1 rot ' rot 1 rot x ', y ', ' x, y, rot 1 trans
11 The atan Function Extends the inverse tangent and correctly copes with the signs of x and y. 11
12 Noise Model for Odometry The measured motion is given by the true motion corrupted with noise. ˆ ˆ rot 1 rot 1 1 rot 1 trans trans trans 3 trans 4 ( rot 1 rot ) ˆ rot rot 1 rot trans
13 Typical Distributions for Probabilistic Motion Models 1 1 ) ( x e x x if 0 ) ( x x Normal distribution Triangular distribution
14 Calculating the Probability Density (zero-centered) For a normal distribution query point 1. Algorithm prob_normal_distribution(a,b):. return std. deviation For a triangular distribution 1. Algorithm prob_triangular_distribution(a,b):. return 14
15 Calculating the Posterior Given x, x, and Odometry hypotheses odometry 1. Algorithm motion_model_odometry(x, x,u) return p 1 p p 3 ( x ' x ) ( y ' y ) trans atan ( y ' y, x ' x ) odometry params (u) rot 1 ' rot rot 1 ˆ ( x ' x ) ( y ' y ) trans ˆ atan ( y ' y, x ' x ) values of interest (x,x ) rot 1 ˆ ' ˆ rot rot 1 p prob ( ˆ, ) 1 rot 1 rot 1 1 rot 1 trans p prob ( ˆ, ( )) trans trans 3 trans 4 rot1 rot p prob ( ˆ, ) 3 rot rot 1 rot trans 15

16 Application Repeated application of the motion model for short movements. Typical banana-shaped distributions obtained for the d-projection of the 3d posterior. x u x u
17 Sample-Based Density Representation
18 Sample-Based Density Representation 18
19 How to Sample from a Normal Distribution? Sampling from a normal distribution 1. Algorithm sample_normal_distribution(b):. return 19
20 Normally Distributed Samples 10 6 samples 0
21 How to Sample from Normal or Triangular Distributions? Sampling from a normal distribution 1. Algorithm sample_normal_distribution(b):. return Sampling from a triangular distribution 1. Algorithm sample_triangular_distribution(b):. return 1

22 For Triangular Distribution 10 3 samples 10 4 samples 10 5 samples 10 6 samples
23 How to Obtain Samples from Arbitrary Functions? 3
24 Rejection Sampling Sampling from arbitrary distributions Sample x from a uniform distribution from [-b,b] Sample c from [0, max f] if f(x) > c keep the sample otherwise reject the sample c x f(x) x f(x ) c OK 4
25 Rejection Sampling Sampling from arbitrary distributions 1. Algorithm sample_distribution(f,b):. repeat until ( ) 6. return 5

26 Example Sampling from 6
27 Sample Odometry Motion Model 1. Algorithm sample_motion_model(u, x): u ˆ ˆ ˆ sample( rot 1 rot 1 1 rot 1 trans trans,, x x,,, y rot 1 rot trans trans sample( sample( ( ) 3 trans 4 rot 1 rot rot rot 1 rot trans ) )) x y x ˆ y ˆ cos( ˆ sin( ˆ ' trans rot 1 ' trans rot 1 ' ˆ ˆ rot 1 rot ) ) sample_normal_distribution 7. Return x ', y ', '
28 Examples (Odometry-Based)
29 Sampling from Our Motion Model Start
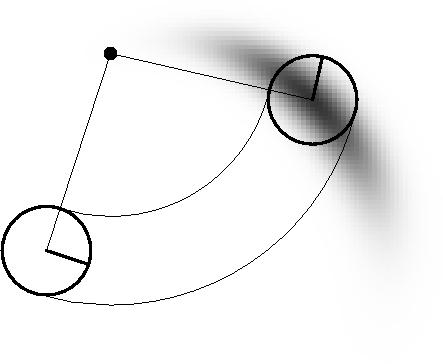
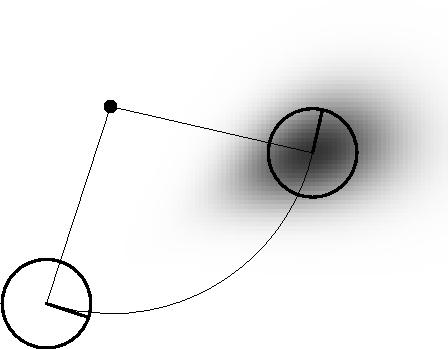
30 Velocity-Based Model
31 Noise Model for the Velocity- Based Model The measured motion is given by the true motion corrupted with noise. vˆ v v 1 ˆ v 3 4 Discussion: What is the disadvantage of this noise model? 31
32 Noise Model for the Velocity- Based Model The ( vˆ, ˆ )-circle constrains the final orientation (D manifold in a 3D space) Better approach: vˆ v v 1 ˆ v 3 4 ˆ v 5 6 Term to account for the final rotation 3
33 Motion Including 3 rd Parameter Term to account for the final rotation 33
34 Equation for the Velocity Model Center of circle: some constant (distance to ICC) (center of circle is orthogonal to the initial heading) 34
35 Equation for the Velocity Model Center of circle: some constant some constant (the center of the circle lies on a ray half way between x and x and is orthogonal to the line between x and x ) 35
36 Equation for the Velocity Model Center of circle: some constant Allows us to solve the equations to: 36
37 Equation for the Velocity Model and 37
38 Equation for the Velocity Model The parameters of the circle: allow for computing the velocities as 38
39 Posterior Probability for Velocity Model 39
40 Sampling from Velocity Model 40
41 Examples (Velocity-Based)
42 Map-Consistent Motion Model ), ' ( x u x p ),, ' ( m x u x p ), ' ( ) ' ( ),, ' ( x u x p m x p m x u x p Approximation:
43 Summary We discussed motion models for odometry-based and velocity-based systems We discussed ways to calculate the posterior probability p(x x, u). We also described how to sample from p(x x, u). Typically the calculations are done in fixed time intervals t. In practice, the parameters of the models have to be learned. We also discussed how to improve this motion model to take the map into account. 43
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
Motion Models (cont) 1 2/17/2017
 1 2/17/2017") Motion Models (cont) 1 /17/017 Sampling from the Velocity Motion Model suppose that a robot has a map of its enironment and it needs to find its pose in the enironment this is the robot localization problem
Motion Models (cont) 1 /17/017 Sampling from the Velocity Motion Model suppose that a robot has a map of its enironment and it needs to find its pose in the enironment this is the robot localization problem
Motion Models (cont) 1 3/15/2018
 1 3/15/2018") Motion Models (cont) 1 3/15/018 Computing the Density to compute,, and use the appropriate probability density function; i.e., for zeromean Gaussian noise: 3/15/018 Sampling from the Velocity Motion Model
Motion Models (cont) 1 3/15/018 Computing the Density to compute,, and use the appropriate probability density function; i.e., for zeromean Gaussian noise: 3/15/018 Sampling from the Velocity Motion Model
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization. Wolfram Burgard
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Localization, Where am I?
 5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
Probabilistic Robotics
 Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Project 1 : Dead Reckoning and Tracking
 CS3630 Spring 2012 Project 1 : Dead Reckoning and Tracking Group : Wayward Sons Sameer Ansari, David Bernal, Tommy Kazenstein 2/8/2012 Wayward Sons CS3630 Spring 12 Project 1 Page 2 of 12 CS 3630 (Spring
CS3630 Spring 2012 Project 1 : Dead Reckoning and Tracking Group : Wayward Sons Sameer Ansari, David Bernal, Tommy Kazenstein 2/8/2012 Wayward Sons CS3630 Spring 12 Project 1 Page 2 of 12 CS 3630 (Spring
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Principles of Robot Motion
 Principles of Robot Motion Theory, Algorithms, and Implementation Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, and Sebastian Thrun A Bradford Book The MIT
Principles of Robot Motion Theory, Algorithms, and Implementation Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, and Sebastian Thrun A Bradford Book The MIT
Encoder applications. I Most common use case: Combination with motors
 3.5 Rotation / Motion - Encoder applications 64-424 Intelligent Robotics Encoder applications I Most common use case: Combination with motors I Used to measure relative rotation angle, rotational direction
3.5 Rotation / Motion - Encoder applications 64-424 Intelligent Robotics Encoder applications I Most common use case: Combination with motors I Used to measure relative rotation angle, rotational direction
Basics of Localization, Mapping and SLAM. Jari Saarinen Aalto University Department of Automation and systems Technology
 Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3
 Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3 Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 28, 2014 COMP 4766/6778 (MUN) Kinematics of
Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3 Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 28, 2014 COMP 4766/6778 (MUN) Kinematics of
Geometric Transformations
 Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
This chapter explains two techniques which are frequently used throughout
 Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING
 CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING By Michael Lowney Senior Thesis in Electrical Engineering University of Illinois at Urbana-Champaign Advisor: Professor Minh Do May 2015
CAMERA POSE ESTIMATION OF RGB-D SENSORS USING PARTICLE FILTERING By Michael Lowney Senior Thesis in Electrical Engineering University of Illinois at Urbana-Champaign Advisor: Professor Minh Do May 2015
Introduction to Mobile Robotics Techniques for 3D Mapping
 Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM
 CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
Chapter 2 Kinematics of Mechanisms
 Chapter Kinematics of Mechanisms.1 Preamble Robot kinematics is the study of the motion (kinematics) of robotic mechanisms. In a kinematic analysis, the position, velocity, and acceleration of all the
Chapter Kinematics of Mechanisms.1 Preamble Robot kinematics is the study of the motion (kinematics) of robotic mechanisms. In a kinematic analysis, the position, velocity, and acceleration of all the
Cinematica dei Robot Mobili su Ruote. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Cinematica dei Robot Mobili su Ruote Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Riferimenti bibliografici Roland SIEGWART, Illah R. NOURBAKHSH Introduction to Autonomous Mobile
Cinematica dei Robot Mobili su Ruote Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Riferimenti bibliografici Roland SIEGWART, Illah R. NOURBAKHSH Introduction to Autonomous Mobile
Introduction to Robotics
 Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Department Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7, av du
Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Department Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7, av du
Robotics (Kinematics) Winter 1393 Bonab University
 Winter 1393 Bonab University") Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Kinematics of the Stewart Platform (Reality Check 1: page 67)
") MATH 5: Computer Project # - Due on September 7, Kinematics of the Stewart Platform (Reality Check : page 7) A Stewart platform consists of six variable length struts, or prismatic joints, supporting a
MATH 5: Computer Project # - Due on September 7, Kinematics of the Stewart Platform (Reality Check : page 7) A Stewart platform consists of six variable length struts, or prismatic joints, supporting a
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
3D Transformations. CS 4620 Lecture 10. Cornell CS4620 Fall 2014 Lecture Steve Marschner (with previous instructors James/Bala)
") 3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Application of Vision-based Particle Filter and Visual Odometry for UAV Localization
 Application of Vision-based Particle Filter and Visual Odometry for UAV Localization Rokas Jurevičius Vilnius University Institute of Mathematics and Informatics Akademijos str. 4 LT-08663 Vilnius, Lithuania
Application of Vision-based Particle Filter and Visual Odometry for UAV Localization Rokas Jurevičius Vilnius University Institute of Mathematics and Informatics Akademijos str. 4 LT-08663 Vilnius, Lithuania
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Inertial Measurement Units II!
 ! Inertial Measurement Units II! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 10! stanford.edu/class/ee267/!! wikipedia! Polynesian Migration! Lecture Overview! short review of
! Inertial Measurement Units II! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 10! stanford.edu/class/ee267/!! wikipedia! Polynesian Migration! Lecture Overview! short review of
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
CS 445 / 645 Introduction to Computer Graphics. Lecture 21 Representing Rotations
 CS 445 / 645 Introduction to Computer Graphics Lecture 21 Representing Rotations Parameterizing Rotations Straightforward in 2D A scalar, θ, represents rotation in plane More complicated in 3D Three scalars
CS 445 / 645 Introduction to Computer Graphics Lecture 21 Representing Rotations Parameterizing Rotations Straightforward in 2D A scalar, θ, represents rotation in plane More complicated in 3D Three scalars
Monte Carlo Localization using Dynamically Expanding Occupancy Grids. Karan M. Gupta
 1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
Monte Carlo Localization
 Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
SLAM: Robotic Simultaneous Location and Mapping
 SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Goals: Course Unit: Describing Moving Objects Different Ways of Representing Functions Vector-valued Functions, or Parametric Curves
 Block #1: Vector-Valued Functions Goals: Course Unit: Describing Moving Objects Different Ways of Representing Functions Vector-valued Functions, or Parametric Curves 1 The Calculus of Moving Objects Problem.
Block #1: Vector-Valued Functions Goals: Course Unit: Describing Moving Objects Different Ways of Representing Functions Vector-valued Functions, or Parametric Curves 1 The Calculus of Moving Objects Problem.
Development of intelligent systems
 Development of intelligent systems (RInS) Transformations between coordinate frames Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Literature: Tadej Bajd (2006). Osnove
Development of intelligent systems (RInS) Transformations between coordinate frames Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Literature: Tadej Bajd (2006). Osnove
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map
 Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Kinematics of Wheeled Robots
 CSE 390/MEAM 40 Kinematics of Wheeled Robots Professor Vijay Kumar Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania September 16, 006 1 Introduction In this chapter,
CSE 390/MEAM 40 Kinematics of Wheeled Robots Professor Vijay Kumar Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania September 16, 006 1 Introduction In this chapter,
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
1 Differential Drive Kinematics
 CS W4733 NOTES - Differential Drive Robots Note: these notes were compiled from Dudek and Jenkin, Computational Principles of Mobile Robotics. 1 Differential Drive Kinematics Many mobile robots use a drive
CS W4733 NOTES - Differential Drive Robots Note: these notes were compiled from Dudek and Jenkin, Computational Principles of Mobile Robotics. 1 Differential Drive Kinematics Many mobile robots use a drive
FIDUCIAL BASED POSE ESTIMATION ADEWOLE AYOADE ALEX YEARSLEY
 FIDUCIAL BASED POSE ESTIMATION ADEWOLE AYOADE ALEX YEARSLEY OVERVIEW Objective Motivation Previous Work Methods Target Recognition Target Identification Pose Estimation Testing Results Demonstration Conclusion
FIDUCIAL BASED POSE ESTIMATION ADEWOLE AYOADE ALEX YEARSLEY OVERVIEW Objective Motivation Previous Work Methods Target Recognition Target Identification Pose Estimation Testing Results Demonstration Conclusion
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Using Algebraic Geometry to Study the Motions of a Robotic Arm
 Using Algebraic Geometry to Study the Motions of a Robotic Arm Addison T. Grant January 28, 206 Abstract In this study we summarize selected sections of David Cox, John Little, and Donal O Shea s Ideals,
Using Algebraic Geometry to Study the Motions of a Robotic Arm Addison T. Grant January 28, 206 Abstract In this study we summarize selected sections of David Cox, John Little, and Donal O Shea s Ideals,
12.1 Quaternions and Rotations
 Fall 2015 CSCI 420 Computer Graphics 12.1 Quaternions and Rotations Hao Li http://cs420.hao-li.com 1 Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera
Fall 2015 CSCI 420 Computer Graphics 12.1 Quaternions and Rotations Hao Li http://cs420.hao-li.com 1 Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little
 Se, Lowe, and Little") SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
MEM380 Applied Autonomous Robots Winter Robot Kinematics
 MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps
 Lecture#06(Thursday September 11) Occupancy Maps") Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
3D Transformations. CS 4620 Lecture Kavita Bala w/ prior instructor Steve Marschner. Cornell CS4620 Fall 2015 Lecture 11
 3D Transformations CS 4620 Lecture 11 1 Announcements A2 due tomorrow Demos on Monday Please sign up for a slot Post on piazza 2 Translation 3 Scaling 4 Rotation about z axis 5 Rotation about x axis 6
3D Transformations CS 4620 Lecture 11 1 Announcements A2 due tomorrow Demos on Monday Please sign up for a slot Post on piazza 2 Translation 3 Scaling 4 Rotation about z axis 5 Rotation about x axis 6
Important. Compact Trigonometry CSO Prioritized Curriculum. Essential. Page 1 of 6
 Essential Important Compact Trigonometry CSO Prioritized Curriculum M.O.T.3.1 apply the right triangle definition of the six trigonometric functions of an angle to determine the values of the function
Essential Important Compact Trigonometry CSO Prioritized Curriculum M.O.T.3.1 apply the right triangle definition of the six trigonometric functions of an angle to determine the values of the function
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 6: Perception/Odometry Terry Payne Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems Lecture 6: Perception/Odometry Terry Payne Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 6: Perception/Odometry Simon Parsons Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems Lecture 6: Perception/Odometry Simon Parsons Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Motion Control (wheeled robots)
") Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
θ x Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul
 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul") θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble
 Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble Masoud Moeini, University of Hamburg, Oct 216 [Wearable Haptic Thimble,A Developing Guide and Tutorial,Francesco Chinello]
Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble Masoud Moeini, University of Hamburg, Oct 216 [Wearable Haptic Thimble,A Developing Guide and Tutorial,Francesco Chinello]
Trigonometric Functions of Any Angle
 Trigonometric Functions of Any Angle MATH 160, Precalculus J. Robert Buchanan Department of Mathematics Fall 2011 Objectives In this lesson we will learn to: evaluate trigonometric functions of any angle,
Trigonometric Functions of Any Angle MATH 160, Precalculus J. Robert Buchanan Department of Mathematics Fall 2011 Objectives In this lesson we will learn to: evaluate trigonometric functions of any angle,
Cam makes a higher kinematic pair with follower. Cam mechanisms are widely used because with them, different types of motion can be possible.
 CAM MECHANISMS Cam makes a higher kinematic pair with follower. Cam mechanisms are widely used because with them, different types of motion can be possible. Cams can provide unusual and irregular motions
CAM MECHANISMS Cam makes a higher kinematic pair with follower. Cam mechanisms are widely used because with them, different types of motion can be possible. Cams can provide unusual and irregular motions
Rigging / Skinning. based on Taku Komura, Jehee Lee and Charles B.Own's slides
 Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
The UTIAS multi-robot cooperative localization and mapping dataset
 The UTIAS multi-robot cooperative localization and mapping dataset The International Journal of Robotics Research 30(8) 969 974 The Author(s) 2011 Reprints and permission: sagepub.co.uk/journalspermissions.nav
The UTIAS multi-robot cooperative localization and mapping dataset The International Journal of Robotics Research 30(8) 969 974 The Author(s) 2011 Reprints and permission: sagepub.co.uk/journalspermissions.nav
Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ x + 5y + 7z 9x + 3y + 11z
 Basic Linear Algebra Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ 1 5 ] 7 9 3 11 Often matrices are used to describe in a simpler way a series of linear equations.
Basic Linear Algebra Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ 1 5 ] 7 9 3 11 Often matrices are used to describe in a simpler way a series of linear equations.
Robot Mapping. A Short Introduction to Homogeneous Coordinates. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to Homogeneous Coordinates Gian Diego Tipaldi, Wolfram Burgard 1 Motivation Cameras generate a projected image of the world Euclidian geometry is suboptimal to describe
Robot Mapping A Short Introduction to Homogeneous Coordinates Gian Diego Tipaldi, Wolfram Burgard 1 Motivation Cameras generate a projected image of the world Euclidian geometry is suboptimal to describe
ME 597/747 Autonomous Mobile Robots. Mid Term Exam. Duration: 2 hour Total Marks: 100
 ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
MTRX4700: Experimental Robotics
 Stefan B. Williams April, 2013 MTR4700: Experimental Robotics Assignment 3 Note: This assignment contributes 10% towards your final mark. This assignment is due on Friday, May 10 th during Week 9 before
Stefan B. Williams April, 2013 MTR4700: Experimental Robotics Assignment 3 Note: This assignment contributes 10% towards your final mark. This assignment is due on Friday, May 10 th during Week 9 before
ROS ARCHITECTURE: AN EXAMPLE ROBOTICS
 ROS ARCHITECTURE: AN EXAMPLE ROBOTICS GENERAL ARCHITECTURE sequencer_node goal control_node /willy2/cmd_vel /plan /willy2/pose ROBOT send_plan pose_node /willy2/odom GENERAL ARCHITECTURE sequencer_node
ROS ARCHITECTURE: AN EXAMPLE ROBOTICS GENERAL ARCHITECTURE sequencer_node goal control_node /willy2/cmd_vel /plan /willy2/pose ROBOT send_plan pose_node /willy2/odom GENERAL ARCHITECTURE sequencer_node
PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang
 PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang Project Goals The goal of this project was to tackle the simultaneous localization and mapping (SLAM) problem for mobile robots. Essentially, the
PacSLAM Arunkumar Byravan, Tanner Schmidt, Erzhuo Wang Project Goals The goal of this project was to tackle the simultaneous localization and mapping (SLAM) problem for mobile robots. Essentially, the
Lab 2A Finding Position and Interpolation with Quaternions
 Lab 2A Finding Position and Interpolation with Quaternions In this Lab we will learn how to use the RVIZ Robot Simulator, Python Programming Interpreter and ROS tf library to study Quaternion math. There
Lab 2A Finding Position and Interpolation with Quaternions In this Lab we will learn how to use the RVIZ Robot Simulator, Python Programming Interpreter and ROS tf library to study Quaternion math. There
Evaluating the Performance of a Vehicle Pose Measurement System
 Evaluating the Performance of a Vehicle Pose Measurement System Harry Scott Sandor Szabo National Institute of Standards and Technology Abstract A method is presented for evaluating the performance of
Evaluating the Performance of a Vehicle Pose Measurement System Harry Scott Sandor Szabo National Institute of Standards and Technology Abstract A method is presented for evaluating the performance of
Jim Lambers MAT 169 Fall Semester Lecture 33 Notes
 Jim Lambers MAT 169 Fall Semester 2009-10 Lecture 33 Notes These notes correspond to Section 9.3 in the text. Polar Coordinates Throughout this course, we have denoted a point in the plane by an ordered
Jim Lambers MAT 169 Fall Semester 2009-10 Lecture 33 Notes These notes correspond to Section 9.3 in the text. Polar Coordinates Throughout this course, we have denoted a point in the plane by an ordered
Markov Localization for Mobile Robots in Dynaic Environments
 Markov Localization for Mobile Robots in Dynaic Environments http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume11/fox99a-html/jair-localize.html Next: Introduction Journal of Artificial Intelligence
Markov Localization for Mobile Robots in Dynaic Environments http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume11/fox99a-html/jair-localize.html Next: Introduction Journal of Artificial Intelligence
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
NERC Gazebo simulation implementation
 NERC 2015 - Gazebo simulation implementation Hannan Ejaz Keen, Adil Mumtaz Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060016, 14060037}@lums.edu.pk ABSTRACT
NERC 2015 - Gazebo simulation implementation Hannan Ejaz Keen, Adil Mumtaz Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060016, 14060037}@lums.edu.pk ABSTRACT
NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM
 NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM Jorma Selkäinaho, Aarne Halme and Janne Paanajärvi Automation Technology Laboratory, Helsinki University of Technology, Espoo,
NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM Jorma Selkäinaho, Aarne Halme and Janne Paanajärvi Automation Technology Laboratory, Helsinki University of Technology, Espoo,
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares. Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz
 Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Advanced Techniques for Mobile Robotics Graph-based SLAM using Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz SLAM Constraints connect the poses of the robot while it is moving
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Monte Carlo Integration
 Lecture 11: Monte Carlo Integration Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2016 Reminder: Quadrature-Based Numerical Integration f(x) Z b a f(x)dx x 0 = a x 1 x 2 x 3 x 4 = b E.g.
Lecture 11: Monte Carlo Integration Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2016 Reminder: Quadrature-Based Numerical Integration f(x) Z b a f(x)dx x 0 = a x 1 x 2 x 3 x 4 = b E.g.
MOBILE ROBOT LOCALIZATION. REVISITING THE TRIANGULATION METHODS. Josep Maria Font, Joaquim A. Batlle
 MOBILE ROBOT LOCALIZATION. REVISITING THE TRIANGULATION METHODS Josep Maria Font, Joaquim A. Batlle Department of Mechanical Engineering Technical University of Catalonia (UC) Avda. Diagonal 647, 08028
MOBILE ROBOT LOCALIZATION. REVISITING THE TRIANGULATION METHODS Josep Maria Font, Joaquim A. Batlle Department of Mechanical Engineering Technical University of Catalonia (UC) Avda. Diagonal 647, 08028
CS283: Robotics Fall 2016: Sensors
 CS283: Robotics Fall 2016: Sensors Sören Schwertfeger / 师泽仁 ShanghaiTech University Robotics ShanghaiTech University - SIST - 23.09.2016 2 REVIEW TRANSFORMS Robotics ShanghaiTech University - SIST - 23.09.2016
CS283: Robotics Fall 2016: Sensors Sören Schwertfeger / 师泽仁 ShanghaiTech University Robotics ShanghaiTech University - SIST - 23.09.2016 2 REVIEW TRANSFORMS Robotics ShanghaiTech University - SIST - 23.09.2016
Volumes of Solids of Revolution Lecture #6 a
 Volumes of Solids of Revolution Lecture #6 a Sphereoid Parabaloid Hyperboloid Whateveroid Volumes Calculating 3-D Space an Object Occupies Take a cross-sectional slice. Compute the area of the slice. Multiply
Volumes of Solids of Revolution Lecture #6 a Sphereoid Parabaloid Hyperboloid Whateveroid Volumes Calculating 3-D Space an Object Occupies Take a cross-sectional slice. Compute the area of the slice. Multiply
Trigonometric Functions. Copyright Cengage Learning. All rights reserved.
 4 Trigonometric Functions Copyright Cengage Learning. All rights reserved. 4.7 Inverse Trigonometric Functions Copyright Cengage Learning. All rights reserved. What You Should Learn Evaluate and graph
4 Trigonometric Functions Copyright Cengage Learning. All rights reserved. 4.7 Inverse Trigonometric Functions Copyright Cengage Learning. All rights reserved. What You Should Learn Evaluate and graph
Coordinate Frames and Transforms
 Coordinate Frames and Transforms 1 Specifiying Position and Orientation We need to describe in a compact way the position of the robot. In 2 dimensions (planar mobile robot), there are 3 degrees of freedom
Coordinate Frames and Transforms 1 Specifiying Position and Orientation We need to describe in a compact way the position of the robot. In 2 dimensions (planar mobile robot), there are 3 degrees of freedom
Local Coordinate Systems From Motion Capture Data
 Local Coordinate Systems From Motion Capture Data Anatomical Coordinate Systems (thigh) How to calculate the anatomical coordinate systems 1) Find the Hip center 2) Find the Knee center 3) Find the Inferior/Superior
Local Coordinate Systems From Motion Capture Data Anatomical Coordinate Systems (thigh) How to calculate the anatomical coordinate systems 1) Find the Hip center 2) Find the Knee center 3) Find the Inferior/Superior
5. Tests and results Scan Matching Optimization Parameters Influence
 126 5. Tests and results This chapter presents results obtained using the proposed method on simulated and real data. First, it is analyzed the scan matching optimization; after that, the Scan Matching
126 5. Tests and results This chapter presents results obtained using the proposed method on simulated and real data. First, it is analyzed the scan matching optimization; after that, the Scan Matching
3D Model Acquisition by Tracking 2D Wireframes
 3D Model Acquisition by Tracking 2D Wireframes M. Brown, T. Drummond and R. Cipolla {96mab twd20 cipolla}@eng.cam.ac.uk Department of Engineering University of Cambridge Cambridge CB2 1PZ, UK Abstract
3D Model Acquisition by Tracking 2D Wireframes M. Brown, T. Drummond and R. Cipolla {96mab twd20 cipolla}@eng.cam.ac.uk Department of Engineering University of Cambridge Cambridge CB2 1PZ, UK Abstract
Final project: 45% of the grade, 10% presentation, 35% write-up. Presentations: in lecture Dec 1 and schedule:
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
EKF Localization and EKF SLAM incorporating prior information
 EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
ROBUST LOCALISATION OF AUTOMATED GUIDED VEHICLES FOR COMPUTER-INTEGRATED MANUFACTURING ENVIRONMENTS. R.C. Dixon 1 *, G.Bright 2 & R.
 ROBUST LOCALISATION OF AUTOMATED GUIDED VEHICLES FOR COMPUTER-INTEGRATED MANUFACTURING ENVIRONMENTS R.C. Dixon 1 *, G.Bright 2 & R. Harley 3 1.2 Department of Mechanical Engineering University of KwaZulu-Natal,
ROBUST LOCALISATION OF AUTOMATED GUIDED VEHICLES FOR COMPUTER-INTEGRATED MANUFACTURING ENVIRONMENTS R.C. Dixon 1 *, G.Bright 2 & R. Harley 3 1.2 Department of Mechanical Engineering University of KwaZulu-Natal,