Titelmaster. The benefit of plant models for laser generated data. - advantages of a symbiosis Dipl. Inf. Stefan Paulus
|
|
|
- Horatio Chambers
- 6 years ago
- Views:
Transcription

1 Titelmaster The benefit of plant models for laser generated data - advantages of a symbiosis Dipl. Inf. Stefan Paulus Institute of Geodesy und Geoinformation Professorship of Geodesy University of Bonn Dipl. Inform. StefanKuhlmann Paulus Prof. Dr. Heiner
2 overview state of the art motivation problems and difficulties benefit of models perspective 2
3 state of the art Laserscanning of plants with airborne laserscanners inertial system + GPS with ground based laserscanner time of flight phase shift in the laboratory triangulation structed light with different geometric 3 approaches Omasa 2007





4 state of the art Extraction of various parameters: canopy height / mean tree height distribution of leaf area in space gap propability Omasa Omasa 2007 breast hight, diameter carbon stocks from biomass estimation shape analysis Omasa 2007 Omasa 2007 Hosoi 2011

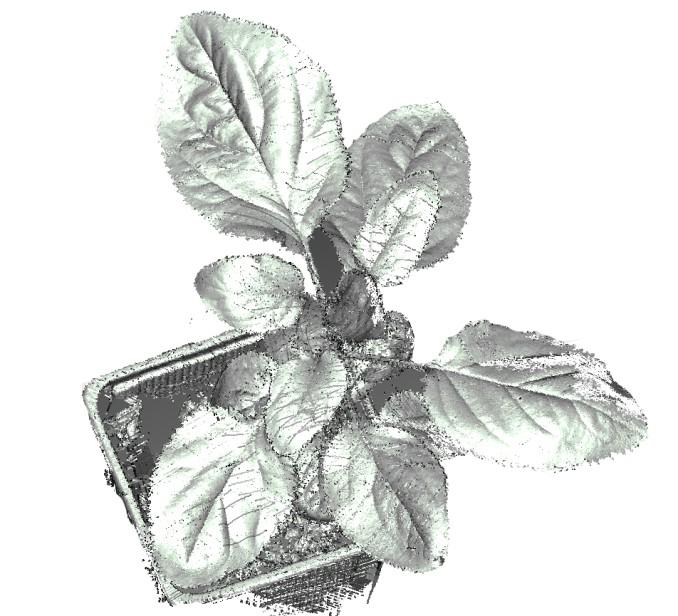



5 state of the art High resolution laser scanning of plants 5 Perceptron 2008




![environment 400 300 ] t[m ig e h](/docs-images/77/75734106/images/6-5.jpg "200 100 3] 0 60 012345678910")


6 motivation today: Derivation of morphological characteristics Sensor fusion with RGB/IR/hyperspectral camera data Reference system for calibration of other sensors Observation of smallest changes to quantify plant response to changes 500 in environment ] t[m ig e h ] time e[d m lu vo time

7 motivation In future: usage directly in the field target-actual comparison prediction of parameters due to environment adjustement of application and geometry 7 Interaction is needed here! Volume [dm³] time Llorens 2011


8 problems and difficulties 1. Plant motion due to growth and vibrations 8 2. Change of plant structure und arrangement




9 problems and difficulties 3. Occlusion due to sensor range and structure Perceptron Penetration of the laser beam and the plant surface Rascher 2010
10 benefit of models In short: penetration occlusion change in structure plant motion improve the technique????????? Benefit of physical (or FSPM) models coordinate system for the plant knowledge of structure independant from sensor connection between parts is known, this enables tracking phyto-reference-system 10


11 benefit of models 11. laserscan s mode l
12 benefit of models resolution accuracy geometry deformation geometry parameters laserscan s prediction structure & connection interaction growth & development 12 mode l high resolution plant puzzle aligned by underlying grammar system






13 benefit of models local data can be aligned to the whole structure by this, motion can be eliminated resp. is less disturbing different sensors like RGB or hyperspectral camera can be fused in a more accurate way 13
14 The idea in short Laserscans Problem s Laser penetration Occlussions Accuracy Resolution Parameter Model Errors Errors Uncertainty no data 14
15 The idea in short Problem s Laserscans Parameter Pre-Model Model Improved Parameters Improved Laserdata advance prediction sensor crossing less errors Reliability Testing Errors advance plant coordinate system less occlussion better data connection 15

16 with an application Laserscans Parameter Pre-Model Reliability Improved Parameters Model Improved Laserdata 16


17 perspective better results for known techniques laserscanning under difficult circumstances parameter extraction under bad point cloud conditions 17


18 perspective better classification results for automated classification 18 leaf / stem classification by using SVM
19 questions? 19 Thanks for your attention. Feel free to ask!
20 Abstract Laserscanning im Pflanzenbereich bietet höchste Auflösungen bei gleichzeitiger nicht invasiver Messung. Aus den resultierenden Punktwolken lassen sich Parameter ableiten, aus denen der Zustand der Pflanze bzgl. bspw. Trockenstress hervorgeht. Probleme ergeben sich aus der Eigenbewegung der Pflanze, der Dimension der Deformation (Wachstum und äußere Einflüsse), sowie einer unzureichenden 3D Zuordnung, die Fusion verschiedener Sensoren und Teilscans sowie Vergleich zu unterschiedlichen Zeitpunkten erschweren. Pflanzenmodelle bieten hier Lösungen durch Pflanzen-bezogene Koordinatensysteme, die zeitlich und räumliche Zuordnungen ermöglichen. Laserscanning of plants provides highly accurate spatial resolution information together with noninvasive measurements. The resulting point cloud can be used to extract parameters describing plant state changes in response to i.e. drought stress. Problems resulting from plant motion, dimension of deformation caused by growth and outer influences as well as from insufficient 3D correspondence of scan parts among each other, complicates fusion of different sensors and scan parts and also the comparison of data of different dates. Plant models are solutions to these problems by providing plant-applied coordinate systems that enable spatio-temporal registration. 20
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
3D Laserscanner App for Indoor Measurements
 3D Laserscanner App for Indoor Measurements V&R Vision & Robotics GmbH Prof. Dr.-Ing. Dietrich Paulus, Dipl.-Inform. Johannes Pellenz info@vision-robotics.de 20. April 2011 vr 3D Laserscanner App for Indoor
3D Laserscanner App for Indoor Measurements V&R Vision & Robotics GmbH Prof. Dr.-Ing. Dietrich Paulus, Dipl.-Inform. Johannes Pellenz info@vision-robotics.de 20. April 2011 vr 3D Laserscanner App for Indoor
Lidar Sensors, Today & Tomorrow. Christian Sevcik RIEGL Laser Measurement Systems
 Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras
 Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
Real-time Image-based Reconstruction of Pipes Using Omnidirectional Cameras Dipl. Inf. Sandro Esquivel Prof. Dr.-Ing. Reinhard Koch Multimedia Information Processing Christian-Albrechts-University of Kiel
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
LIDAR. Exploiting the Versatility of a measurement principle in Photogrammetry. Norbert Pfeifer Department of Geodesy and Geoinformation TU Wien
 LIDAR Exploiting the Versatility of a measurement principle in Photogrammetry Norbert Pfeifer Department of Geodesy and Geoinformation TU Wien Photogrammetry and cameras TU Wien, 200th anniversary November
LIDAR Exploiting the Versatility of a measurement principle in Photogrammetry Norbert Pfeifer Department of Geodesy and Geoinformation TU Wien Photogrammetry and cameras TU Wien, 200th anniversary November
THE ISPRS/EUROSDR BENCHMARK ON MULTI-PLATFORM PHOTOGRAMMETRY: RESULTS AND LESSON LEARNT FRANCESCO NEX AND MARKUS GERKE
 THE ISPRS/EUROSDR BENCHMARK ON MULTI-PLATFORM PHOTOGRAMMETRY: RESULTS AND LESSON LEARNT FRANCESCO NEX AND MARKUS GERKE Overview Summary of the results Statistics Data release What s next? ISPRS / EuroSDR
THE ISPRS/EUROSDR BENCHMARK ON MULTI-PLATFORM PHOTOGRAMMETRY: RESULTS AND LESSON LEARNT FRANCESCO NEX AND MARKUS GERKE Overview Summary of the results Statistics Data release What s next? ISPRS / EuroSDR
Generation and application of hyperspectral 3D plant models
 Generation and application of hyperspectral 3D plant models J. Behmann* 1, A.-K. Mahlein 2, S. Paulus 3, E.-C. Oerke 2, H. Kuhlmann 3, L. Plümer 1 1 Institute of Geodesy and Geoinformation, Geoinformation,
Generation and application of hyperspectral 3D plant models J. Behmann* 1, A.-K. Mahlein 2, S. Paulus 3, E.-C. Oerke 2, H. Kuhlmann 3, L. Plümer 1 1 Institute of Geodesy and Geoinformation, Geoinformation,
Towards the Influence of the Angle of Incidence and the Surface Roughness on Distances in Terrestrial Laser Scanning
 Towards the Influence of the Angle of Incidence and the Surface Roughness on Distances in Terrestrial Laser Scanning Miriam ZÁMEČNÍKOVÁ; NEUNER, H., Austria Key words: Terrestrial Laser Scanning, Reflectorless
Towards the Influence of the Angle of Incidence and the Surface Roughness on Distances in Terrestrial Laser Scanning Miriam ZÁMEČNÍKOVÁ; NEUNER, H., Austria Key words: Terrestrial Laser Scanning, Reflectorless
Laser scanners with echo digitization for full waveform analysis
 Laser scanners with echo digitization for full waveform analysis Peter Rieger, Andreas Ullrich, Rainer Reichert RIEGL Laser Measurement Systems GmbH DI Peter Rieger Project Management RIEGL LMS GmbH A-3580
Laser scanners with echo digitization for full waveform analysis Peter Rieger, Andreas Ullrich, Rainer Reichert RIEGL Laser Measurement Systems GmbH DI Peter Rieger Project Management RIEGL LMS GmbH A-3580
Machine Learning and Sensor Fusion for Precision Farming. Solmaz Hajmohammadi, Christopher Schardt, Noah Fahlgren, Arash Abbasi, Stefan Paulus
 Machine Learning and Sensor Fusion for Precision Farming Solmaz Hajmohammadi, Christopher Schardt, Noah Fahlgren, Arash Abbasi, Stefan Paulus Food Insecurity Increase in population 2.8 Billion more people
Machine Learning and Sensor Fusion for Precision Farming Solmaz Hajmohammadi, Christopher Schardt, Noah Fahlgren, Arash Abbasi, Stefan Paulus Food Insecurity Increase in population 2.8 Billion more people
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Optimized Design of 3D Laser Triangulation Systems
 The Scan Principle of 3D Laser Triangulation Triangulation Geometry Example of Setup Z Y X Target as seen from the Camera Sensor Image of Laser Line The Scan Principle of 3D Laser Triangulation Detektion
The Scan Principle of 3D Laser Triangulation Triangulation Geometry Example of Setup Z Y X Target as seen from the Camera Sensor Image of Laser Line The Scan Principle of 3D Laser Triangulation Detektion
New Approach in Non- Contact 3D Free Form Scanning
 New Approach in Non- Contact 3D Free Form Scanning Contents Abstract Industry Trends The solution A smart laser scanning system Implementation of the laser scanning probe in parts inspection Conclusion
New Approach in Non- Contact 3D Free Form Scanning Contents Abstract Industry Trends The solution A smart laser scanning system Implementation of the laser scanning probe in parts inspection Conclusion
CE 59700: LASER SCANNING
 Digital Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, USA Webpage: http://purdue.edu/ce/ Email: ahabib@purdue.edu CE 59700: LASER SCANNING 1 Contact Information Instructor:
Digital Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, USA Webpage: http://purdue.edu/ce/ Email: ahabib@purdue.edu CE 59700: LASER SCANNING 1 Contact Information Instructor:
Geometric Registration for Deformable Shapes 1.1 Introduction
 Geometric Registration for Deformable Shapes 1.1 Introduction Overview Data Sources and Applications Problem Statement Overview Presenters Will Chang University of California at San Diego, USA Hao Li ETH
Geometric Registration for Deformable Shapes 1.1 Introduction Overview Data Sources and Applications Problem Statement Overview Presenters Will Chang University of California at San Diego, USA Hao Li ETH
Individual Tree Parameters Estimation from Terrestrial Laser Scanner Data
 Environmental Engineering 10th International Conference eissn 2029-7092 / eisbn 978-609-476-044-0 Vilnius Gediminas Technical University Lithuania, 27 28 April 2017 Article ID: enviro.2017.230 http://enviro.vgtu.lt
Environmental Engineering 10th International Conference eissn 2029-7092 / eisbn 978-609-476-044-0 Vilnius Gediminas Technical University Lithuania, 27 28 April 2017 Article ID: enviro.2017.230 http://enviro.vgtu.lt
Small-footprint full-waveform airborne LiDAR for habitat assessment in the ChangeHabitats2 project
 Small-footprint full-waveform airborne LiDAR for habitat assessment in the ChangeHabitats2 project Werner Mücke, András Zlinszky, Sharif Hasan, Martin Pfennigbauer, Hermann Heilmeier and Norbert Pfeifer
Small-footprint full-waveform airborne LiDAR for habitat assessment in the ChangeHabitats2 project Werner Mücke, András Zlinszky, Sharif Hasan, Martin Pfennigbauer, Hermann Heilmeier and Norbert Pfeifer
Investigating the Applicability of Standard Software Packages for Laser Scanner Based Deformation Analyses
 Investigating the Applicability of Standard Software Packages for Laser Scanner Based Deformation Analyses Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland FIG Working
Investigating the Applicability of Standard Software Packages for Laser Scanner Based Deformation Analyses Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland FIG Working
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
AUTOMATIC DETERMINATION OF FOREST INVENTORY PARAMETERS USING TERRESTRIAL LASER SCANNING
 AUTOMATIC DETERMINATION OF FOREST INVENTORY PARAMETERS USING TERRESTRIAL LASER SCANNING Merlijn Simonse 1, Tobias Aschoff, Heinrich Spiecker 3 and Michael Thies 4 Albert Ludwigs University, Institute for
AUTOMATIC DETERMINATION OF FOREST INVENTORY PARAMETERS USING TERRESTRIAL LASER SCANNING Merlijn Simonse 1, Tobias Aschoff, Heinrich Spiecker 3 and Michael Thies 4 Albert Ludwigs University, Institute for
GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV OCT D IMAGE FUSION
 GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV 2017 - OCT 2018 3D IMAGE FUSION 3D IMAGE FUSION WHAT A 3D IMAGE IS? A cloud of 3D points collected from a 3D
GABRIELE GUIDI, PHD POLITECNICO DI MILANO, ITALY VISITING SCHOLAR AT INDIANA UNIVERSITY NOV 2017 - OCT 2018 3D IMAGE FUSION 3D IMAGE FUSION WHAT A 3D IMAGE IS? A cloud of 3D points collected from a 3D
Registration with Spheres and Checker Board Targets
 Registration with Spheres and Checker Board Targets Work Shop Óscar García Uriarte Sales Engineer 1 Index When and Why Targets? Which kind of targets? How to place them. Targets in Scene. Accuracy using
Registration with Spheres and Checker Board Targets Work Shop Óscar García Uriarte Sales Engineer 1 Index When and Why Targets? Which kind of targets? How to place them. Targets in Scene. Accuracy using
Outline of Presentation. Introduction to Overwatch Geospatial Software Feature Analyst and LIDAR Analyst Software
 Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements
 Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology. Maziana Muhamad
 Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology Maziana Muhamad Summarising LiDAR (Airborne Laser Scanning) LiDAR is a reliable survey technique, capable of: acquiring
Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology Maziana Muhamad Summarising LiDAR (Airborne Laser Scanning) LiDAR is a reliable survey technique, capable of: acquiring
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS
 CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
CLASSIFICATION OF NONPHOTOGRAPHIC REMOTE SENSORS PASSIVE ACTIVE DIGITAL CAMERA THERMAL (e.g. TIMS) VIDEO CAMERA MULTI- SPECTRAL SCANNERS VISIBLE & NIR MICROWAVE HYPERSPECTRAL (e.g. AVIRIS) SLAR Real Aperture
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration. JAMIE YOUNG Senior Manager LiDAR Solutions
 Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
Robust spatial approximation of laser scanner point clouds by means of free-form curve and surface approaches
 Robust spatial approximation of laser scanner point clouds by means of free-form curve and surface approaches IUGG, IAG Symposia 2015 G05 GNSS++: Emerging Technologies and Applications Prague, June 24,
Robust spatial approximation of laser scanner point clouds by means of free-form curve and surface approaches IUGG, IAG Symposia 2015 G05 GNSS++: Emerging Technologies and Applications Prague, June 24,
: Easy 3D Calibration of laser triangulation systems. Fredrik Nilsson Product Manager, SICK, BU Vision
 : Easy 3D Calibration of laser triangulation systems Fredrik Nilsson Product Manager, SICK, BU Vision Using 3D for Machine Vision solutions : 3D imaging is becoming more important and well accepted for
: Easy 3D Calibration of laser triangulation systems Fredrik Nilsson Product Manager, SICK, BU Vision Using 3D for Machine Vision solutions : 3D imaging is becoming more important and well accepted for
Comparison of Two Mathematical Models for the Surface Reconstruction for Deformation Analysis by Using FARO Focus 3D
 Ke-Wei Li Comparison of Two Mathematical Models for the Surface Reconstruction for Deformation Analysis by Using FARO Focus 3D Duration of the Thesis: 6 months Completion: October 2012 Tutor: Dipl.-Ing.
Ke-Wei Li Comparison of Two Mathematical Models for the Surface Reconstruction for Deformation Analysis by Using FARO Focus 3D Duration of the Thesis: 6 months Completion: October 2012 Tutor: Dipl.-Ing.
Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity
 Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity Johannes Schneider, Thomas Läbe, Wolfgang Förstner 1 Department of Photogrammetry Institute of Geodesy and Geoinformation
Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity Johannes Schneider, Thomas Läbe, Wolfgang Förstner 1 Department of Photogrammetry Institute of Geodesy and Geoinformation
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Backpack-based inertial navigation and LiDAR mapping in forest environments
 Backpack-based inertial navigation and LiDAR mapping in forest environments Mattias Tjernqvist June 2017 Introduction 3D model our environment Light Detection And Ranging (LiDAR) - Light - Laser scanner
Backpack-based inertial navigation and LiDAR mapping in forest environments Mattias Tjernqvist June 2017 Introduction 3D model our environment Light Detection And Ranging (LiDAR) - Light - Laser scanner
Usability study of 3D Time-of-Flight cameras for automatic plant phenotyping
 93 Usability study of 3D Time-of-Flight cameras for automatic plant phenotyping Ralph Klose, Jaime Penlington, Arno Ruckelshausen University of Applied Sciences Osnabrück/ Faculty of Engineering and Computer
93 Usability study of 3D Time-of-Flight cameras for automatic plant phenotyping Ralph Klose, Jaime Penlington, Arno Ruckelshausen University of Applied Sciences Osnabrück/ Faculty of Engineering and Computer
FOR 474: Forest Inventory. Plot Level Metrics: Getting at Canopy Heights. Plot Level Metrics: What is the Point Cloud Anyway?
 FOR 474: Forest Inventory Plot Level Metrics from Lidar Heights Other Plot Measures Sources of Error Readings: See Website Plot Level Metrics: Getting at Canopy Heights Heights are an Implicit Output of
FOR 474: Forest Inventory Plot Level Metrics from Lidar Heights Other Plot Measures Sources of Error Readings: See Website Plot Level Metrics: Getting at Canopy Heights Heights are an Implicit Output of
Drones for research - Observing the world in 3D from a LiDAR-UAV
 Drones for research - Observing the world in 3D from a LiDAR-UAV Program lunch seminar: Lammert Kooistra: The Unmanned Aerial Remote Sensing Facility goes 3D: Unmanned Aerial Laser Scanning Sander Mücher:
Drones for research - Observing the world in 3D from a LiDAR-UAV Program lunch seminar: Lammert Kooistra: The Unmanned Aerial Remote Sensing Facility goes 3D: Unmanned Aerial Laser Scanning Sander Mücher:
Tree height measurements and tree growth estimation in a mire environment using digital surface models
 Tree height measurements and tree growth estimation in a mire environment using digital surface models E. Baltsavias 1, A. Gruen 1, M. Küchler 2, P.Thee 2, L.T. Waser 2, L. Zhang 1 1 Institute of Geodesy
Tree height measurements and tree growth estimation in a mire environment using digital surface models E. Baltsavias 1, A. Gruen 1, M. Küchler 2, P.Thee 2, L.T. Waser 2, L. Zhang 1 1 Institute of Geodesy
Multi-temporal LIDAR data for forestry an approach to investigate timber yield changes
 Multi-temporal LIDAR data for forestry an approach to investigate timber yield changes UniSA Stefan Peters, Jixue Liu, David Bruce, Jiuyong Li ForestrySA Jim O Hehir, Mary-Anne Larkin, Anthony Hay 1 Why
Multi-temporal LIDAR data for forestry an approach to investigate timber yield changes UniSA Stefan Peters, Jixue Liu, David Bruce, Jiuyong Li ForestrySA Jim O Hehir, Mary-Anne Larkin, Anthony Hay 1 Why
QUALITY CONTROL OF CONSTRUCTED MODELS USING 3D POINT CLOUD
 20 th International Conference on the Application of Computer Science and Mathematics in Architecture and Civil Engineering K. Gürlebeck and T. Lahmer (eds.) Weimar, Germany, 20-22 July 2015 QUALITY CONTROL
20 th International Conference on the Application of Computer Science and Mathematics in Architecture and Civil Engineering K. Gürlebeck and T. Lahmer (eds.) Weimar, Germany, 20-22 July 2015 QUALITY CONTROL
Overview of MOLI data product (MOLI: Multi-footprint Observation Lidar and Imager)
") Overview of MOLI data product (MOLI: Multi-footprint Observation Lidar and Imager) Jan 7, 2016 JAXA Jumpei Murooka 1 Contents 1. Mission instruments: MOLI 2. Standard products of MOLI 3. Lidar product
Overview of MOLI data product (MOLI: Multi-footprint Observation Lidar and Imager) Jan 7, 2016 JAXA Jumpei Murooka 1 Contents 1. Mission instruments: MOLI 2. Standard products of MOLI 3. Lidar product
EnsoMOSAIC. Kopterit metsäninventointidatan keruualustoina
 EnsoMOSAIC Kopterit metsäninventointidatan keruualustoina 20.4.2017 Company introduction MosaicMill founded in 2009 EnsoMOSAIC technology since 1994 Main businesses EnsoMOSAIC forestry solutions EnsoMOSAIC
EnsoMOSAIC Kopterit metsäninventointidatan keruualustoina 20.4.2017 Company introduction MosaicMill founded in 2009 EnsoMOSAIC technology since 1994 Main businesses EnsoMOSAIC forestry solutions EnsoMOSAIC
The Geometrical Quality of Terrestrial Laser Scanner (TLS)
") The Geometrical Quality of Terrestrial Laser Scanner (TLS), Germany Key words: Terrestrial Laser Scanner (TLS), Laser Scanning, Geometrical Quality, Accuracy, Verification of the Measurements, Optical
The Geometrical Quality of Terrestrial Laser Scanner (TLS), Germany Key words: Terrestrial Laser Scanner (TLS), Laser Scanning, Geometrical Quality, Accuracy, Verification of the Measurements, Optical
Exterior Orientation Parameters
 Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
LiForest Software White paper. TRGS, 3070 M St., Merced, 93610, Phone , LiForest
 0 LiForest LiForest is a platform to manipulate large LiDAR point clouds and extract useful information specifically for forest applications. It integrates a variety of advanced LiDAR processing algorithms
0 LiForest LiForest is a platform to manipulate large LiDAR point clouds and extract useful information specifically for forest applications. It integrates a variety of advanced LiDAR processing algorithms
Estimating the leaf inclination angle distribution of the wheat canopy using a portable scanning lidar
 Short Paper J. Agric. Meteorol. () 65 (3): 297-302, 2009 Estimating the leaf inclination angle distribution of the wheat canopy using a portable scanning lidar Fumiki HOSOI, Yohei NAKAI, and Kenji OMASA
Short Paper J. Agric. Meteorol. () 65 (3): 297-302, 2009 Estimating the leaf inclination angle distribution of the wheat canopy using a portable scanning lidar Fumiki HOSOI, Yohei NAKAI, and Kenji OMASA
Sensors and applications for drone based remote sensing
 Sensors and applications for drone based remote sensing Dr. Ilkka Pölönen Dr. Eija Honkavaara, NLS Dr. Heikki Saari, VTT Dr. Sakari Tuominen, Mr. Jere Kaivosoja, Luke Laboratory Joint research with Finnish
Sensors and applications for drone based remote sensing Dr. Ilkka Pölönen Dr. Eija Honkavaara, NLS Dr. Heikki Saari, VTT Dr. Sakari Tuominen, Mr. Jere Kaivosoja, Luke Laboratory Joint research with Finnish
Photonfocus AG 3D Laser Triangulation with CMOS Cameras
 Photonfocus AG 3D Laser Triangulation with CMOS Cameras Dr. Peter Mario Schwider, CTO 01.11.2016 Index CMOS Cameras for Laser Triangulation General product overview Photonfocus AG Laser triangulation with
Photonfocus AG 3D Laser Triangulation with CMOS Cameras Dr. Peter Mario Schwider, CTO 01.11.2016 Index CMOS Cameras for Laser Triangulation General product overview Photonfocus AG Laser triangulation with
High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data
 ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Integrated Multi-Source LiDAR and Imagery
 Figure 1: AirDaC aerial scanning system Integrated Multi-Source LiDAR and Imagery The derived benefits of LiDAR scanning in the fields of engineering, surveying, and planning are well documented. It has
Figure 1: AirDaC aerial scanning system Integrated Multi-Source LiDAR and Imagery The derived benefits of LiDAR scanning in the fields of engineering, surveying, and planning are well documented. It has
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation
 Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
SIMULATED LIDAR WAVEFORMS FOR THE ANALYSIS OF LIGHT PROPAGATION THROUGH A TREE CANOPY
 SIMULATED LIDAR WAVEFORMS FOR THE ANALYSIS OF LIGHT PROPAGATION THROUGH A TREE CANOPY Angela M. Kim and Richard C. Olsen Remote Sensing Center Naval Postgraduate School 1 University Circle Monterey, CA
SIMULATED LIDAR WAVEFORMS FOR THE ANALYSIS OF LIGHT PROPAGATION THROUGH A TREE CANOPY Angela M. Kim and Richard C. Olsen Remote Sensing Center Naval Postgraduate School 1 University Circle Monterey, CA
4D Crop Analysis for Plant Geometry Estimation in Precision Agriculture
 4D Crop Analysis for Plant Geometry Estimation in Precision Agriculture MIT Laboratory for Information & Decision Systems IEEE RAS TC on Agricultural Robotics and Automation Webinar #37 Acknowledgements
4D Crop Analysis for Plant Geometry Estimation in Precision Agriculture MIT Laboratory for Information & Decision Systems IEEE RAS TC on Agricultural Robotics and Automation Webinar #37 Acknowledgements
LiDAR and its use for the enhanced forest inventory
 LiDAR and its use for the enhanced forest inventory Richard Fournier Département de géomatique appliquée Workshop of the Canadian Institute of Forestry Corner Brook, Newfoundland, March 27 2013 LiDAR -
LiDAR and its use for the enhanced forest inventory Richard Fournier Département de géomatique appliquée Workshop of the Canadian Institute of Forestry Corner Brook, Newfoundland, March 27 2013 LiDAR -
New Technologies For The Real 3D Reference Point Determination
 New Technologies For The Real 3D Reference Point Determination Maria Hennes, Cornelia Eschelbach GIK, Geodetic Institute of the University of Karlsruhe, Germany Contact author: Maria Hennes, e-mail: hennes@gik.uni-karlsruhe.de
New Technologies For The Real 3D Reference Point Determination Maria Hennes, Cornelia Eschelbach GIK, Geodetic Institute of the University of Karlsruhe, Germany Contact author: Maria Hennes, e-mail: hennes@gik.uni-karlsruhe.de
Plane Based Free Stationing for Building Models
 Christian MANTHE, Germany Key words: plane based building model, plane detection, plane based transformation SUMMARY 3D Building models are used to construct, manage and rebuild buildings. Thus, associated
Christian MANTHE, Germany Key words: plane based building model, plane detection, plane based transformation SUMMARY 3D Building models are used to construct, manage and rebuild buildings. Thus, associated
Freestyle 3D. Features and applications. Dr. Daniel Döring Team Lead Product Development Freestyle 1
 Freestyle 3D Features and applications Dr. Daniel Döring Team Lead Product Development Freestyle 1 3D scanning Building works: How to record data? How to check what has been built? How to fit in new parts?
Freestyle 3D Features and applications Dr. Daniel Döring Team Lead Product Development Freestyle 1 3D scanning Building works: How to record data? How to check what has been built? How to fit in new parts?
Estimation of elevation dependent deformations of a parabolic reflector of a large radio telescope
 . Estimation of elevation dependent deformations of a parabolic reflector of a large radio telescope 1 Christoph Holst & Heiner Kuhlmann JISDM, 2-4 November 2011, Hong Kong, China . Motivation Laser Scanner
. Estimation of elevation dependent deformations of a parabolic reflector of a large radio telescope 1 Christoph Holst & Heiner Kuhlmann JISDM, 2-4 November 2011, Hong Kong, China . Motivation Laser Scanner
Aerial and Mobile LiDAR Data Fusion
 Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
FOR 274: Surfaces from Lidar. Lidar DEMs: Understanding the Returns. Lidar DEMs: Understanding the Returns
 FOR 274: Surfaces from Lidar LiDAR for DEMs The Main Principal Common Methods Limitations Readings: See Website Lidar DEMs: Understanding the Returns The laser pulse travel can travel through trees before
FOR 274: Surfaces from Lidar LiDAR for DEMs The Main Principal Common Methods Limitations Readings: See Website Lidar DEMs: Understanding the Returns The laser pulse travel can travel through trees before
Airborne LiDAR Data Acquisition for Forestry Applications. Mischa Hey WSI (Corvallis, OR)
") Airborne LiDAR Data Acquisition for Forestry Applications Mischa Hey WSI (Corvallis, OR) WSI Services Corvallis, OR Airborne Mapping: Light Detection and Ranging (LiDAR) Thermal Infrared Imagery 4-Band
Airborne LiDAR Data Acquisition for Forestry Applications Mischa Hey WSI (Corvallis, OR) WSI Services Corvallis, OR Airborne Mapping: Light Detection and Ranging (LiDAR) Thermal Infrared Imagery 4-Band
Localization, Where am I?
 5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
APPLICATION OF TERRESTRIAL LASER SCANNERS FOR THE DETERMINATION OF FOREST INVENTORY PARAMETRS
 APPLICATION OF TERRESTRIAL LASER SCANNERS FOR THE DETERMINATION OF FOREST INVENTORY PARAMETRS A. Bienert 1, S. Scheller 1, E. Keane 2, G. Mullooly 2, F. Mohan 2 1 Technical University of Dresden, Institute
APPLICATION OF TERRESTRIAL LASER SCANNERS FOR THE DETERMINATION OF FOREST INVENTORY PARAMETRS A. Bienert 1, S. Scheller 1, E. Keane 2, G. Mullooly 2, F. Mohan 2 1 Technical University of Dresden, Institute
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Model (version-zalf)
") Designing User Interface for Biome-BGC BGC Model (version-zalf) H.M. Mehedi Hasan This project was funded by: Investition in Ihre Zukunft Gefördert durch das Ministerium für Arbeit, Soziales, Frauen und
Designing User Interface for Biome-BGC BGC Model (version-zalf) H.M. Mehedi Hasan This project was funded by: Investition in Ihre Zukunft Gefördert durch das Ministerium für Arbeit, Soziales, Frauen und
A QUALITY ASSESSMENT OF AIRBORNE LASER SCANNER DATA
 A QUALITY ASSESSMENT OF AIRBORNE LASER SCANNER DATA E. Ahokas, H. Kaartinen, J. Hyyppä Finnish Geodetic Institute, Geodeetinrinne 2, 243 Masala, Finland Eero.Ahokas@fgi.fi KEYWORDS: LIDAR, accuracy, quality,
A QUALITY ASSESSMENT OF AIRBORNE LASER SCANNER DATA E. Ahokas, H. Kaartinen, J. Hyyppä Finnish Geodetic Institute, Geodeetinrinne 2, 243 Masala, Finland Eero.Ahokas@fgi.fi KEYWORDS: LIDAR, accuracy, quality,
Automated Micro Robotic Manipulation using Optical Tweezers
 Automated Micro Robotic Manipulation using Optical Tweezers Ashis G. Banerjee, Ph.D. Assistant Professor Department of Industrial & Systems Engineering Department of Mechanical Engineering University of
Automated Micro Robotic Manipulation using Optical Tweezers Ashis G. Banerjee, Ph.D. Assistant Professor Department of Industrial & Systems Engineering Department of Mechanical Engineering University of
Reverse Engineering: Mechanical. Dr. Tarek A. Tutunji
 Reverse Engineering: Mechanical Dr. Tarek A. Tutunji Mechanical RE References: 1. RE (reverse engineering) as necessary phase by rapid product development by Sokovic and Kopac 2. A Practical Appreciation
Reverse Engineering: Mechanical Dr. Tarek A. Tutunji Mechanical RE References: 1. RE (reverse engineering) as necessary phase by rapid product development by Sokovic and Kopac 2. A Practical Appreciation
Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation
 Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation MCG 2016, Vichy, France, 5-6 th October Erik Heinz, Christian Eling, Markus Wieland, Lasse
Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation MCG 2016, Vichy, France, 5-6 th October Erik Heinz, Christian Eling, Markus Wieland, Lasse
An Introduction to Lidar & Forestry May 2013
 An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
Continuous Multi-Views Tracking using Tensor Voting
 Continuous Multi-Views racking using ensor Voting Jinman Kang, Isaac Cohen and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA 90089-073.
Continuous Multi-Views racking using ensor Voting Jinman Kang, Isaac Cohen and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA 90089-073.
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
ksa MOS Ultra-Scan Performance Test Data
 ksa MOS Ultra-Scan Performance Test Data Introduction: ksa MOS Ultra Scan 200mm Patterned Silicon Wafers The ksa MOS Ultra Scan is a flexible, highresolution scanning curvature and tilt-measurement system.
ksa MOS Ultra-Scan Performance Test Data Introduction: ksa MOS Ultra Scan 200mm Patterned Silicon Wafers The ksa MOS Ultra Scan is a flexible, highresolution scanning curvature and tilt-measurement system.
HIGH PRECISION SURVEY AND ALIGNMENT OF LARGE LINEAR COLLIDERS - HORIZONTAL ALIGNMENT -
 HIGH PRECISION SURVEY AND ALIGNMENT OF LARGE LINEAR COLLIDERS - HORIZONTAL ALIGNMENT - A. Herty, J. Albert 1 Deutsches Elektronen-Synchrotron DESY, Hamburg, Germany with international partners * 1. INTRODUCTION
HIGH PRECISION SURVEY AND ALIGNMENT OF LARGE LINEAR COLLIDERS - HORIZONTAL ALIGNMENT - A. Herty, J. Albert 1 Deutsches Elektronen-Synchrotron DESY, Hamburg, Germany with international partners * 1. INTRODUCTION
Berlin Institute of Technology Department of Geodesy and Geoinformation Science. Plane Based Free Stationing for Building Models
 Berlin Institute of Technology Department of Geodesy and Geoinformation Science Plane Based Free Stationing for Building Models Christian Manthe, Germany 1.05.011 Introduction Motivation Plane based building
Berlin Institute of Technology Department of Geodesy and Geoinformation Science Plane Based Free Stationing for Building Models Christian Manthe, Germany 1.05.011 Introduction Motivation Plane based building
Terrestrial radar and laser scanning for deformation monitoring: first steps towards assisted radar scanning
 Terrestrial radar and laser scanning for deformation monitoring: first steps towards assisted radar scanning Daniel Wujanz 1, Frank Neitzel 1, H.P. Hebel 2, J. Linke 2, W. Busch 2 1 Chair of Geodesy and
Terrestrial radar and laser scanning for deformation monitoring: first steps towards assisted radar scanning Daniel Wujanz 1, Frank Neitzel 1, H.P. Hebel 2, J. Linke 2, W. Busch 2 1 Chair of Geodesy and
Forest Structure Estimation in the Canadian Boreal forest
 Forest Structure Estimation in the Canadian Boreal forest Michael L. Benson Leland E.Pierce Kathleen M. Bergen Kamal Sarabandi Kailai Zhang Caitlin E. Ryan The University of Michigan, Radiation Lab & School
Forest Structure Estimation in the Canadian Boreal forest Michael L. Benson Leland E.Pierce Kathleen M. Bergen Kamal Sarabandi Kailai Zhang Caitlin E. Ryan The University of Michigan, Radiation Lab & School
Deep Learning for Remote Sensing
 1 ENPC Data Science Week Deep Learning for Remote Sensing Alexandre Boulch 2 ONERA Research, Innovation, expertise and long-term vision for industry, French government and Europe 3 Materials Optics Aerodynamics
1 ENPC Data Science Week Deep Learning for Remote Sensing Alexandre Boulch 2 ONERA Research, Innovation, expertise and long-term vision for industry, French government and Europe 3 Materials Optics Aerodynamics
Tool shape Workpiece material
 DETERMINATION OF FREE FORM SURFACE MORPHOLOGY IN MULTI AXIS MILLING Prof. Dr. -Ing. habil K. -D. Bouzakis, Lecturer. Dr. -Ing. K. Efstathiou, Dipl. -Ing. P. Aichouh Laboratory for Machine Tools and Machine
DETERMINATION OF FREE FORM SURFACE MORPHOLOGY IN MULTI AXIS MILLING Prof. Dr. -Ing. habil K. -D. Bouzakis, Lecturer. Dr. -Ing. K. Efstathiou, Dipl. -Ing. P. Aichouh Laboratory for Machine Tools and Machine
2010 LiDAR Project. GIS User Group Meeting June 30, 2010
 2010 LiDAR Project GIS User Group Meeting June 30, 2010 LiDAR = Light Detection and Ranging Technology that utilizes lasers to determine the distance to an object or surface Measures the time delay between
2010 LiDAR Project GIS User Group Meeting June 30, 2010 LiDAR = Light Detection and Ranging Technology that utilizes lasers to determine the distance to an object or surface Measures the time delay between
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
The Applanix Approach to GPS/INS Integration
 Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
INSPECTION OF FREE FORM SURFACES
 7 th INTERNATIONAL MULTIDISCIPLINARY CONFERENCE Baia Mare, Romania, May 17-18, 2007 ISSN-1224-3264 INSPECTION OF FREE FORM SURFACES Prof. Ing. Dr. Jozef Peterka Ing. Ladislav Morovič - Ing. Peter Pokorný,
7 th INTERNATIONAL MULTIDISCIPLINARY CONFERENCE Baia Mare, Romania, May 17-18, 2007 ISSN-1224-3264 INSPECTION OF FREE FORM SURFACES Prof. Ing. Dr. Jozef Peterka Ing. Ladislav Morovič - Ing. Peter Pokorný,
A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS
 A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS M. Hassanein a, *, A. Moussa a,b, N. El-Sheimy a a Department of Geomatics Engineering, University of Calgary, Calgary, Alberta, Canada
A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS M. Hassanein a, *, A. Moussa a,b, N. El-Sheimy a a Department of Geomatics Engineering, University of Calgary, Calgary, Alberta, Canada
Quality assurance and calibration tasks in the scope of multi-sensor systems
 Quality assurance and calibration tasks in the scope of multi-sensor systems FIG Working Week 2015 From the Wisdom of the Ages to the Challenges of the Modern World Sofia, May 19, 2015 Jens-André Paffenholz,
Quality assurance and calibration tasks in the scope of multi-sensor systems FIG Working Week 2015 From the Wisdom of the Ages to the Challenges of the Modern World Sofia, May 19, 2015 Jens-André Paffenholz,
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Relative and absolute calibration of a multihead camera system with oblique and nadir looking cameras for a UAS
 Relative and absolute calibration of a multihead camera system with oblique and nadir looking cameras for a UAS Dipl.-Ing. Frank Niemeyer Rostock University Chair for Geodesy and Geoinformatics UAV-g 2013,
Relative and absolute calibration of a multihead camera system with oblique and nadir looking cameras for a UAS Dipl.-Ing. Frank Niemeyer Rostock University Chair for Geodesy and Geoinformatics UAV-g 2013,
THE USE OF AIRBORNE HYPERSPECTRAL REFLECTANCE DATA TO CHARACTERIZE FOREST SPECIES DISTRIBUTION PATTERNS
 THE USE OF AIRBORNE HYPERSPECTRAL REFLECTANCE DATA TO CHARACTERIZE FOREST SPECIES DISTRIBUTION PATTERNS Weihs, P., Huber K. Institute of Meteorology, Department of Water, Atmosphere and Environment, BOKU
THE USE OF AIRBORNE HYPERSPECTRAL REFLECTANCE DATA TO CHARACTERIZE FOREST SPECIES DISTRIBUTION PATTERNS Weihs, P., Huber K. Institute of Meteorology, Department of Water, Atmosphere and Environment, BOKU
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond
 High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Advanced Machine Learning Methods for Early Detection of Weeds and Plant Diseases in Precision Crop Protection
 Titelmaster Advanced Machine Learning Methods for Early Detection of Weeds and Plant Diseases in Precision Crop Protection Lutz Plümer, Till Rumpf, Christoph Römer University of Bonn Insitute of Geodesy
Titelmaster Advanced Machine Learning Methods for Early Detection of Weeds and Plant Diseases in Precision Crop Protection Lutz Plümer, Till Rumpf, Christoph Römer University of Bonn Insitute of Geodesy
High Resolution Laserscanning, not only for 3D-City Models
 Lohr 133 High Resolution Laserscanning, not only for 3D-City Models UWE LOHR, Ravensburg ABSTRACT The TopoSys laserscanner system is designed to produce digital elevation models (DEMs) of the environment
Lohr 133 High Resolution Laserscanning, not only for 3D-City Models UWE LOHR, Ravensburg ABSTRACT The TopoSys laserscanner system is designed to produce digital elevation models (DEMs) of the environment
LiDAR Data Processing:
 LiDAR Data Processing: Concepts and Methods for LEFI Production Gordon W. Frazer GWF LiDAR Analytics Outline of Presentation Data pre-processing Data quality checking and options for repair Data post-processing
LiDAR Data Processing: Concepts and Methods for LEFI Production Gordon W. Frazer GWF LiDAR Analytics Outline of Presentation Data pre-processing Data quality checking and options for repair Data post-processing
Influences of Geometric Configuration on the Analysis of Uncertainties Affecting a Novel Configuration of Self-Tracking LDV
 Influences of Geometric Configuration on the Analysis of Uncertainties Affecting a Novel Configuration of Self-Tracking LDV Giuseppe Dinardo, Laura Fabbiano, Gaetano Vacca Dept. of Mechanics, Mathematics
Influences of Geometric Configuration on the Analysis of Uncertainties Affecting a Novel Configuration of Self-Tracking LDV Giuseppe Dinardo, Laura Fabbiano, Gaetano Vacca Dept. of Mechanics, Mathematics
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
OSIF. Inline 3D-Inspection of Slightly Curved Surfaces. Bulges, Dents and Waviness; Inline Inspection During the Production Process.
 Inline 3D-Inspection of Slightly Curved Surfaces. Measurement of Flatness, Detection of Bulges, Dents and Waviness; Inline Inspection During the Production Process. OSIF GmbH Optical Sensor Technologies
Inline 3D-Inspection of Slightly Curved Surfaces. Measurement of Flatness, Detection of Bulges, Dents and Waviness; Inline Inspection During the Production Process. OSIF GmbH Optical Sensor Technologies
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Multisensoral UAV-Based Reference Measurements for Forestry Applications
 Multisensoral UAV-Based Reference Measurements for Forestry Applications Research Manager D.Sc. Anttoni Jaakkola Centre of Excellence in Laser Scanning Research 2 Outline UAV applications Reference level
Multisensoral UAV-Based Reference Measurements for Forestry Applications Research Manager D.Sc. Anttoni Jaakkola Centre of Excellence in Laser Scanning Research 2 Outline UAV applications Reference level