Aerial Robotic Autonomous Exploration & Mapping in Degraded Visual Environments. Kostas Alexis Autonomous Robots Lab, University of Nevada, Reno
|
|
|
- Phoebe Norman
- 6 years ago
- Views:
Transcription
1 Aerial Robotic Autonomous Exploration & Mapping in Degraded Visual Environments Kostas Alexis Autonomous Robots Lab, University of Nevada, Reno


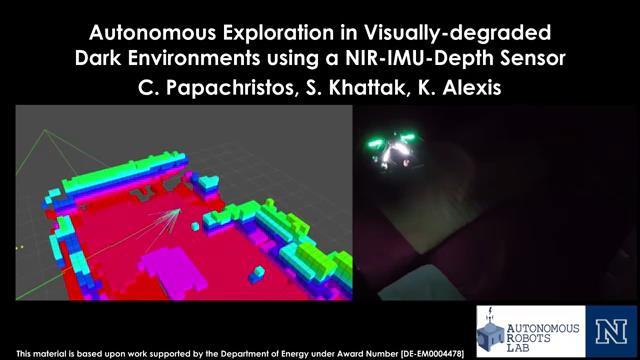
2 Motivation Aerial robotic operation in GPS-denied Degraded Visual Environments (DVE) Ability to autonomously explore, monitor and map in conditions of complete darkness, haze and other DVEs. Extend the operational abilities of aerial robots. Critical step for industrial, inspection & maintenance, safety and security applications. Indicative application domains: Nuclear Site Decommissioning Oil & Gas Industry Inspection Infrastructure Inspection Surveillance, Security Monitoring
 Ability to autonomously explore, monitor and map in conditions of complete")


3 Motivation Aerial robotic operation in GPS-denied Degraded Visual Environments (DVE) Ability to autonomously explore, monitor and map in conditions of complete darkness, haze and other DVEs. Extend the operational abilities of aerial robots. Critical step for industrial, inspection & maintenance, safety and security applications. Indicative application domains: Nuclear Site Decommissioning Oil & Gas Industry Inspection Infrastructure Inspection Surveillance, Security Monitoring


4 Research Directions Multi-Modal sensor fusion to enable the GPS-denied localization and mapping in DVEs. A Path Planning ensemble for autonomous exploration in DVEs or optimized inspection. Active Perception approach for reliable autonomous operation subject to the challenges of visually-degraded environments. Pure volumetric exploration is not sufficient The selected viewpoints and their order heavily influences the localization of the robot.
, Inertial, 3D")


5 Multi-Modal Mapping Unit Multi-modal: Visual (LED-synchronized or Near Infrared), Inertial, 3D Time-of-Flight Future extensions: sound, RADAR Hardware time-synchronization of visual-inertial data Software-synchronization of VI-depth data Intel NUC5i7RYH responsible for the localization and mappin pipeline
6 Multi-Modal Mapping Unit Multi-modal fusion baseline and new research direction: Baseline #1: Visual-Inertial enhanced Geometrically Stable ICP Baseline #2: Visual-Inertial / Depth odometry estimates looselycoupled through an EKF Research Direction: Multi-Modal Features Research on top of L O. Vasconcelos, E. R. Nascimento, M. F. M. Campos, KVD: Scale Invariant Keypoints by Combining Visual and Depth Data




7 Multi-Modal Mapping Unit Multi-modal fusion baseline and new research direction: Baseline #1: Visual-Inertial enhanced Geometrically Stable ICP Baseline #2: Visual-Inertial / Depth odometry estimates loosely-coupled through an EKF
8 Towards a Complete Planning Ensemble Complete Path Planning ensemble addressing the problems of optimized coverage and robustly autonomous exploration. Key challenge of Exploration in DVEs: Sensor data ill-conditioning is to be expected. Localizability-aware exploration is the key Active perception and belief propagation methods provide the theoretical grounds for our approach Future direction: Curiosity-driven exploration

9 Towards a Complete Planning Ensemble Complete Path Planning ensemble addressing the problems of optimized coverage and robustly autonomous exploration. Key challenge of Exploration in DVEs: Sensor data ill-conditioning is to be expected. Localizability-aware exploration is the key Active perception and belief propagation methods provide the theoretical grounds for our approach Future direction: Curiosity-driven exploration
10 Uncertainty-aware Exploration & Mapping Problem Definition The overall problem is that of exploring an unknown bounded 3D volume V E R 3, while aiming to minimize the localization and mapping uncertainty as evaluated through a metric over the robot pose and landmarks probabilistic belief. Problem 1: Volumetric Exploration Given a bounded volume V E, find a collision free path σ starting at an initial E configuration ξ init Ξ that leads to identifying the free and occupied parts V free and VE occ when being executed, such that there does not exist any collision free configuration from which any piece of V E E {V free, V E occ } could be perceived. Combined Problem Problem 2: Belief Uncertainty-aware planning Given a V M V E, find a collision free path σ M starting at an initial configuration ξ 0 Ξ and ending in a configuration ξ final Ξ that aims to improve the robot s localization and mapping confidence by following paths of optimized expected robot pose and tracked landmarks covariance.
11 Robot Configuration
 Two-steps / nested optimization Path Planning")
12 Uncertainty-aware Exploration & Mapping Receding Horizon Exploration and Mapping Planner ( ) Two-steps / nested optimization Path Planning paradigm

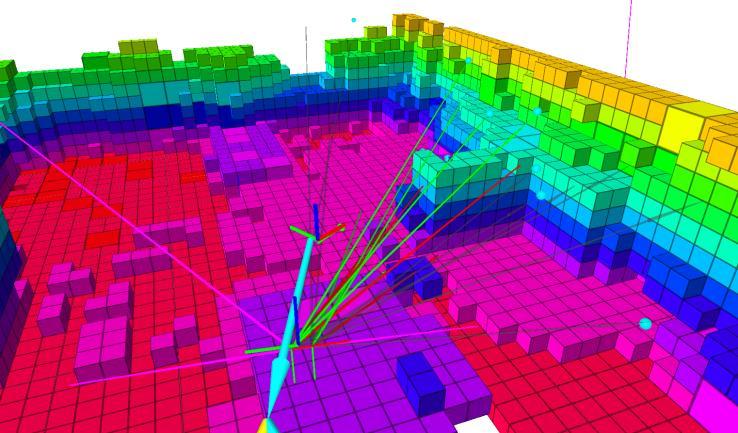
13 rhemplanner - Exploration Step



14 rhemplanner - Exploration Step Exploration Gain with probabilistic re-observation Aiming to maximize newly explored space and reobserve space with decreased confidence of being mapped as occupied.
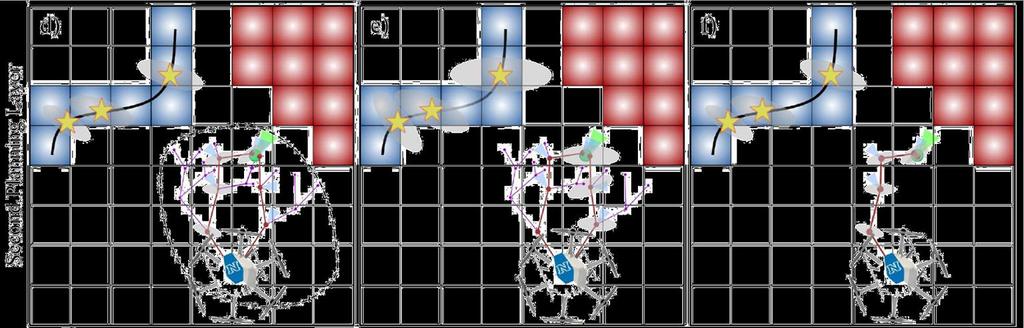
15 rhemplanner - Uncertainty-aware Step

16 rhemplanner - Uncertainty-aware Step The robot performs onboard localization and mapping For the case of our experiments it performs visual-inertial localization The assumptions are: Pose, features/landmarks and their uncertainties are estimated Dense, volumetric mapping takes place To get an estimate about its pose, it relies on tracking landmarks from its sensor systems. The system performs odometry in an EKF-fashion and the overall state of the filter is:

17 rhemplanner - Uncertainty-aware Step Belief Propagation: in order to identify the paths that minimize the robot uncertainty, a mechanism to propagate the robot belief about its pose and the tracked features has to be established. Using Michael Bloesch, Sammy Omari, Marco Hutter, Roland Siegwart, ROVIO: Robust Visual Inertial Odometry Using a Direct EKF-Based Approach, IROS 2015

18 rhemplanner - Uncertainty-aware Step Propagate the robot s belief about its pose and the tracked landmarks: Prediction step State Propagation Step
19 rhemplanner - Uncertainty-aware Step Propagate the robot s belief about its pose and the tracked landmarks: Update step Filter Update Step By stacking the above terms for all visible landmarks, standard EKF update step is directly performed to derive the new estimate of the robot belief for its state and the tracked features. Identify which viewpoints are expected to be visible given the next pose and the known map Compute the propagated belief covariance matrix




20 rhemplanner - Uncertainty-aware Step Propagate the robot s belief about its pose and the tracked landmarks: Update step Filter Update Step By stacking the above terms for all visible landmarks, standard EKF update step is directly performed to derive the new estimate of the robot belief for its state and the tracked features.

21 rhemplanner - Uncertainty-aware Step Uncertainty optimization: to be able to derive which path minimizes the robot uncertainty about its pose and the tracked landmarks, a metric of how small the covariance ellipsoid is has to be defined. What metric?
22 rhemplanner - Uncertainty-aware Step Uncertainty optimization: to be able to derive which path minimizes the robot uncertainty about its pose and the tracked landmarks, a metric of how small the covariance ellipsoid is has to be defined. D-optimality metric: Broadly: maximize the determinant of the information matrix X X of the design. This criterion results in maximizing the differential Shannon information content of the parameter estimates.
23 rhemplanner Algorithm ξ 0 current vehicle configuration First Planning Step Initialize T E with ξ 0 E g best 0 // Set best exploration gain to zero n best n 0 ξ 0 // Set best best exploration node to root N T E Number of nodes in T E While N E E T < N max E or g best == 0 do Incrementally build T E E by adding n new N T E N T E + 1 E ξ new E if ExplorationGain n new E > g best then E n new E n new E g best if N E E T > N TOT E ExplorationGain n new then Terminate planning E, n E RH, ξ RH ExtractBestPathSegment n best σ RH S ξrh LocalSet(ξ RH )
24 rhemplanner Algorithm E Propagate robot belief along σ RH a 1 // number of admissible paths Second Planning Step g M a BeliefGain(σ E RH ) g M M best g a // straight path belief gain σ M best M σ RH while N M T < N M max or V T M = S ξrh do Incrementally build T M M by adding n new ξ new Propagate robot belief from current to planned vertex if ξ new S ξrh then Add new vertex n M new at ξ RH and connect a a + 1 σ M α ExtractBranch(n M new ) g α M BeliefGain(σ a M ) if g M α < g M best then return σ M σ M σ a M g M best g a M
25 rhemplanner Complexity Analysis
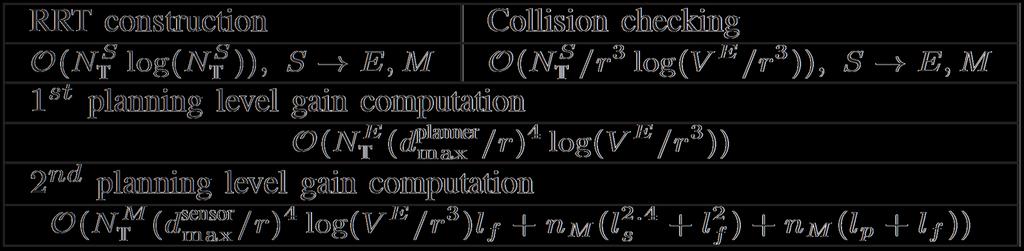
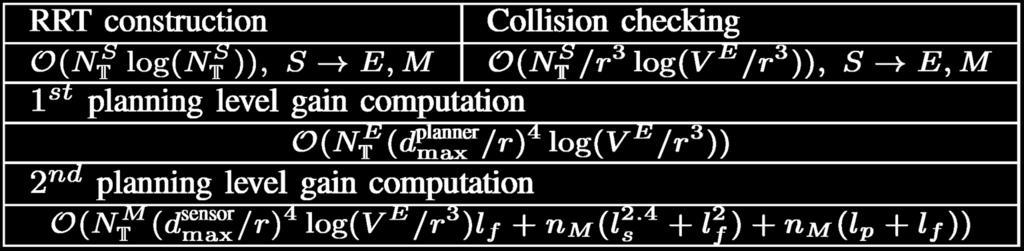
26 rhemplanner Complexity Analysis
27 rhemplanner Evaluation (Experimental)

28 Uncertainty-aware Exploration & Mapping Kostas Alexis, Autonomous Robots Lab,
29
30


31 Open Source contributions Open Source Code: Structural Inspection Planner: Next-Best-View Planner: Receding Horizon Exploration and Mapping Planner: Associated Datasets: Structural Inspection Planner: Next-Best-View Planner: Receding Horizon Exploration and Mapping Planner: Solar-powered UAV Sensing & Mapping: Change Detection Dataset

32 Thank you! Please ask your question!
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Sampling-based Autonomous Exploration Dr. Kostas Alexis (CSE) Real-life is 3D, Complex, Possibly unknown Known Model to Compute Global Inspection Path
CS491/691: Introduction to Aerial Robotics Topic: Sampling-based Autonomous Exploration Dr. Kostas Alexis (CSE) Real-life is 3D, Complex, Possibly unknown Known Model to Compute Global Inspection Path
BadgerWorks Lectures. Sampling-based Path Planning Primer. Kostas Alexis
 BadgerWorks Lectures Sampling-based Path Planning Primer Kostas Alexis Course Outline A brief introduction What path planning is about and some basic notes Collision-free Navigation through PRM, RRT and
BadgerWorks Lectures Sampling-based Path Planning Primer Kostas Alexis Course Outline A brief introduction What path planning is about and some basic notes Collision-free Navigation through PRM, RRT and
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
UAV Autonomous Navigation in a GPS-limited Urban Environment
 UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
arxiv: v2 [cs.ro] 29 Jan 2018
![arxiv: v2 [cs.ro] 29 Jan 2018](/thumbs/77/75756420.jpg "arxiv: v2 [cs.ro] 29 Jan 2018") Visual Inertial Odometry enhanced Geometrically Stable IP for Mapping Applications using Aerial Robots Tung Dang, Shehryar Khatta, hristos Papachristos, Kostas Alexis arxiv:1801.08228v2 [cs.ro] 29 Jan
Visual Inertial Odometry enhanced Geometrically Stable IP for Mapping Applications using Aerial Robots Tung Dang, Shehryar Khatta, hristos Papachristos, Kostas Alexis arxiv:1801.08228v2 [cs.ro] 29 Jan
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Visual SLAM for small Unmanned Aerial Vehicles
 Visual SLAM for small Unmanned Aerial Vehicles Margarita Chli Autonomous Systems Lab, ETH Zurich Simultaneous Localization And Mapping How can a body navigate in a previously unknown environment while
Visual SLAM for small Unmanned Aerial Vehicles Margarita Chli Autonomous Systems Lab, ETH Zurich Simultaneous Localization And Mapping How can a body navigate in a previously unknown environment while
What is the SLAM problem?
 SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map
 Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles
 Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles Shaojie Shen Dept. of Electrical and Systems Engineering & GRASP Lab, University of Pennsylvania Committee: Daniel
Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles Shaojie Shen Dept. of Electrical and Systems Engineering & GRASP Lab, University of Pennsylvania Committee: Daniel
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Introduction to Autonomous Mobile Robots
 Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
Localization, Where am I?
 5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots
 3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Hierarchical Multi-Objective Planning For Autonomous Vehicles
 Hierarchical Multi-Objective Planning For Autonomous Vehicles Alberto Speranzon United Technologies Research Center UTC Institute for Advanced Systems Engineering Seminar Series Acknowledgements and References
Hierarchical Multi-Objective Planning For Autonomous Vehicles Alberto Speranzon United Technologies Research Center UTC Institute for Advanced Systems Engineering Seminar Series Acknowledgements and References
Robotic Perception and Action: Vehicle SLAM Assignment
 Robotic Perception and Action: Vehicle SLAM Assignment Mariolino De Cecco Mariolino De Cecco, Mattia Tavernini 1 CONTENTS Vehicle SLAM Assignment Contents Assignment Scenario 3 Odometry Localization...........................................
Robotic Perception and Action: Vehicle SLAM Assignment Mariolino De Cecco Mariolino De Cecco, Mattia Tavernini 1 CONTENTS Vehicle SLAM Assignment Contents Assignment Scenario 3 Odometry Localization...........................................
Autonomous navigation in industrial cluttered environments using embedded stereo-vision
 Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March 2017 1 Copernic Lab (ONERA Palaiseau) Research
Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March 2017 1 Copernic Lab (ONERA Palaiseau) Research
Lecture 13 Visual Inertial Fusion
 Lecture 13 Visual Inertial Fusion Davide Scaramuzza Course Evaluation Please fill the evaluation form you received by email! Provide feedback on Exercises: good and bad Course: good and bad How to improve
Lecture 13 Visual Inertial Fusion Davide Scaramuzza Course Evaluation Please fill the evaluation form you received by email! Provide feedback on Exercises: good and bad Course: good and bad How to improve
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Sensor Modalities. Sensor modality: Different modalities:
 Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
arxiv: v2 [cs.ro] 5 Dec 2016
![arxiv: v2 [cs.ro] 5 Dec 2016](/thumbs/76/73294676.jpg "arxiv: v2 [cs.ro] 5 Dec 2016") Cooperative Aerial Coverage Path Planning for Visual Inspection of Complex Infrastructures Sina Sharif Mansouri, Christoforos Kanellakis, David Wuthier, Emil Fresk and George Nikolakopoulos arxiv:1611.05196v2
Cooperative Aerial Coverage Path Planning for Visual Inspection of Complex Infrastructures Sina Sharif Mansouri, Christoforos Kanellakis, David Wuthier, Emil Fresk and George Nikolakopoulos arxiv:1611.05196v2
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Attack Resilient State Estimation for Vehicular Systems
 December 15 th 2013. T-SET Final Report Attack Resilient State Estimation for Vehicular Systems Nicola Bezzo (nicbezzo@seas.upenn.edu) Prof. Insup Lee (lee@cis.upenn.edu) PRECISE Center University of Pennsylvania
December 15 th 2013. T-SET Final Report Attack Resilient State Estimation for Vehicular Systems Nicola Bezzo (nicbezzo@seas.upenn.edu) Prof. Insup Lee (lee@cis.upenn.edu) PRECISE Center University of Pennsylvania
Graph-based SLAM (Simultaneous Localization And Mapping) for Bridge Inspection Using UAV (Unmanned Aerial Vehicle)
 for Bridge Inspection Using UAV (Unmanned Aerial Vehicle)") Graph-based SLAM (Simultaneous Localization And Mapping) for Bridge Inspection Using UAV (Unmanned Aerial Vehicle) Taekjun Oh 1), Sungwook Jung 2), Seungwon Song 3), and Hyun Myung 4) 1), 2), 3), 4) Urban
Graph-based SLAM (Simultaneous Localization And Mapping) for Bridge Inspection Using UAV (Unmanned Aerial Vehicle) Taekjun Oh 1), Sungwook Jung 2), Seungwon Song 3), and Hyun Myung 4) 1), 2), 3), 4) Urban
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps
 OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
ROBOT TEAMS CH 12. Experiments with Cooperative Aerial-Ground Robots
 ROBOT TEAMS CH 12 Experiments with Cooperative Aerial-Ground Robots Gaurav S. Sukhatme, James F. Montgomery, and Richard T. Vaughan Speaker: Jeff Barnett Paper Focus Heterogeneous Teams for Surveillance
ROBOT TEAMS CH 12 Experiments with Cooperative Aerial-Ground Robots Gaurav S. Sukhatme, James F. Montgomery, and Richard T. Vaughan Speaker: Jeff Barnett Paper Focus Heterogeneous Teams for Surveillance
Navigation methods and systems
 Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains
 Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots
 A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
L12. EKF-SLAM: PART II. NA568 Mobile Robotics: Methods & Algorithms
 L12. EKF-SLAM: PART II NA568 Mobile Robotics: Methods & Algorithms Today s Lecture Feature-based EKF-SLAM Review Data Association Configuration Space Incremental ML (i.e., Nearest Neighbor) Joint Compatibility
L12. EKF-SLAM: PART II NA568 Mobile Robotics: Methods & Algorithms Today s Lecture Feature-based EKF-SLAM Review Data Association Configuration Space Incremental ML (i.e., Nearest Neighbor) Joint Compatibility
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Visual-Inertial Localization and Mapping for Robot Navigation
 Visual-Inertial Localization and Mapping for Robot Navigation Dr. Guillermo Gallego Robotics & Perception Group University of Zurich Davide Scaramuzza University of Zurich - http://rpg.ifi.uzh.ch Mocular,
Visual-Inertial Localization and Mapping for Robot Navigation Dr. Guillermo Gallego Robotics & Perception Group University of Zurich Davide Scaramuzza University of Zurich - http://rpg.ifi.uzh.ch Mocular,
Unmanned Aerial Vehicles
 Unmanned Aerial Vehicles Embedded Control Edited by Rogelio Lozano WILEY Table of Contents Chapter 1. Aerodynamic Configurations and Dynamic Models 1 Pedro CASTILLO and Alejandro DZUL 1.1. Aerodynamic
Unmanned Aerial Vehicles Embedded Control Edited by Rogelio Lozano WILEY Table of Contents Chapter 1. Aerodynamic Configurations and Dynamic Models 1 Pedro CASTILLO and Alejandro DZUL 1.1. Aerodynamic
Visually Augmented POMDP for Indoor Robot Navigation
 Visually Augmented POMDP for Indoor obot Navigation LÓPEZ M.E., BAEA., BEGASA L.M., ESCUDEO M.S. Electronics Department University of Alcalá Campus Universitario. 28871 Alcalá de Henares (Madrid) SPAIN
Visually Augmented POMDP for Indoor obot Navigation LÓPEZ M.E., BAEA., BEGASA L.M., ESCUDEO M.S. Electronics Department University of Alcalá Campus Universitario. 28871 Alcalá de Henares (Madrid) SPAIN
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
EKF Localization and EKF SLAM incorporating prior information
 EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
Robotics. Lecture 7: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Simultaneous local and global state estimation for robotic navigation
 Simultaneous local and global state estimation for robotic navigation The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As
Simultaneous local and global state estimation for robotic navigation The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As
AUTONOMOUS NAVIGATION IN COMPLEX INDOOR AND OUTDOOR ENVIRONMENTS WITH MICRO AERIAL VEHICLES. Shaojie Shen A DISSERTATION
 AUTONOMOUS NAVIGATION IN COMPLEX INDOOR AND OUTDOOR ENVIRONMENTS WITH MICRO AERIAL VEHICLES Shaojie Shen A DISSERTATION in Electrical and Systems Engineering Presented to the Faculties of the University
AUTONOMOUS NAVIGATION IN COMPLEX INDOOR AND OUTDOOR ENVIRONMENTS WITH MICRO AERIAL VEHICLES Shaojie Shen A DISSERTATION in Electrical and Systems Engineering Presented to the Faculties of the University
Introduction to Mobile Robotics. SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping The SLAM Problem SLAM is the process by which a robot builds a map of the environment and, at the same time, uses this map to
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping The SLAM Problem SLAM is the process by which a robot builds a map of the environment and, at the same time, uses this map to
Vol agile avec des micro-robots volants contrôlés par vision
 Vol agile avec des micro-robots volants contrôlés par vision From Active Perception to Event-based Vision Henri Rebecq from Prof. Davide Scaramuzza s lab GT UAV 17 Novembre 2016, Paris Davide Scaramuzza
Vol agile avec des micro-robots volants contrôlés par vision From Active Perception to Event-based Vision Henri Rebecq from Prof. Davide Scaramuzza s lab GT UAV 17 Novembre 2016, Paris Davide Scaramuzza
ME 597/747 Autonomous Mobile Robots. Mid Term Exam. Duration: 2 hour Total Marks: 100
 ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
Towards a visual perception system for LNG pipe inspection
 Towards a visual perception system for LNG pipe inspection LPV Project Team: Brett Browning (PI), Peter Rander (co PI), Peter Hansen Hatem Alismail, Mohamed Mustafa, Joey Gannon Qri8 Lab A Brief Overview
Towards a visual perception system for LNG pipe inspection LPV Project Team: Brett Browning (PI), Peter Rander (co PI), Peter Hansen Hatem Alismail, Mohamed Mustafa, Joey Gannon Qri8 Lab A Brief Overview
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
VALIDATION OF 3D ENVIRONMENT PERCEPTION FOR LANDING ON SMALL BODIES USING UAV PLATFORMS
 ASTRA 2015 VALIDATION OF 3D ENVIRONMENT PERCEPTION FOR LANDING ON SMALL BODIES USING UAV PLATFORMS Property of GMV All rights reserved PERIGEO PROJECT The work presented here is part of the PERIGEO project
ASTRA 2015 VALIDATION OF 3D ENVIRONMENT PERCEPTION FOR LANDING ON SMALL BODIES USING UAV PLATFORMS Property of GMV All rights reserved PERIGEO PROJECT The work presented here is part of the PERIGEO project
Particle Filter in Brief. Robot Mapping. FastSLAM Feature-based SLAM with Particle Filters. Particle Representation. Particle Filter Algorithm
 Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robotics. Lecture 8: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 8: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 8: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Anibal Ollero Professor and head of GRVC University of Seville (Spain)
") Aerial Manipulation Anibal Ollero Professor and head of GRVC University of Seville (Spain) aollero@us.es Scientific Advisor of the Center for Advanced Aerospace Technologies (Seville, Spain) aollero@catec.aero
Aerial Manipulation Anibal Ollero Professor and head of GRVC University of Seville (Spain) aollero@us.es Scientific Advisor of the Center for Advanced Aerospace Technologies (Seville, Spain) aollero@catec.aero
A Formal Model Approach for the Analysis and Validation of the Cooperative Path Planning of a UAV Team
 A Formal Model Approach for the Analysis and Validation of the Cooperative Path Planning of a UAV Team Antonios Tsourdos Brian White, Rafał Żbikowski, Peter Silson Suresh Jeyaraman and Madhavan Shanmugavel
A Formal Model Approach for the Analysis and Validation of the Cooperative Path Planning of a UAV Team Antonios Tsourdos Brian White, Rafał Żbikowski, Peter Silson Suresh Jeyaraman and Madhavan Shanmugavel
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
The AZUR project. Development of autonomous navigation software for urban operation of VTOL-type UAV. Yoko Watanabe
 The AZUR project Development of autonomous navigation software for urban operation of VTOL-type UAV Yoko Watanabe Dept. of Systems Control and Flight Dynalics (DCSD) MAVRC Garden Workshop 02/ 07 / 2015
The AZUR project Development of autonomous navigation software for urban operation of VTOL-type UAV Yoko Watanabe Dept. of Systems Control and Flight Dynalics (DCSD) MAVRC Garden Workshop 02/ 07 / 2015
The Use of UAV s for Gathering Spatial Information. James Van Rens CEO MAPPS Winter Conference January, 2015
 The Use of UAV s for Gathering Spatial Information James Van Rens CEO MAPPS Winter Conference January, 2015 1 UAV Technological Timeline 1980 s RPV (Remotely Piloted Vehicle) Operator on ground, almost
The Use of UAV s for Gathering Spatial Information James Van Rens CEO MAPPS Winter Conference January, 2015 1 UAV Technological Timeline 1980 s RPV (Remotely Piloted Vehicle) Operator on ground, almost
Mobile Robots Summery. Autonomous Mobile Robots
 Mobile Robots Summery Roland Siegwart Mike Bosse, Marco Hutter, Martin Rufli, Davide Scaramuzza, (Margarita Chli, Paul Furgale) Mobile Robots Summery 1 Introduction probabilistic map-based localization
Mobile Robots Summery Roland Siegwart Mike Bosse, Marco Hutter, Martin Rufli, Davide Scaramuzza, (Margarita Chli, Paul Furgale) Mobile Robots Summery 1 Introduction probabilistic map-based localization
SLAM II: SLAM for robotic vision-based perception
 SLAM II: SLAM for robotic vision-based perception Margarita Chli Martin Rufli, Roland Siegwart Margarita Chli, Martin Rufli, Roland Siegwart SLAM II today s lecture Last time: how to do SLAM? Today: what
SLAM II: SLAM for robotic vision-based perception Margarita Chli Martin Rufli, Roland Siegwart Margarita Chli, Martin Rufli, Roland Siegwart SLAM II today s lecture Last time: how to do SLAM? Today: what
Cooperative UAVs as a tool for Aerial Inspection of the Aging Infrastructure
 Cooperative UAVs as a tool for Aerial Inspection of the Aging Infrastructure Sina Sharif Mansouri, Christoforos Kanellakis, Emil Fresk, Dariusz Kominiak and George Nikolakopoulos Abstract This article
Cooperative UAVs as a tool for Aerial Inspection of the Aging Infrastructure Sina Sharif Mansouri, Christoforos Kanellakis, Emil Fresk, Dariusz Kominiak and George Nikolakopoulos Abstract This article
High-precision, consistent EKF-based visual-inertial odometry
 High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
arxiv: v2 [cs.ro] 12 Mar 2018
![arxiv: v2 [cs.ro] 12 Mar 2018](/thumbs/92/110653417.jpg "arxiv: v2 [cs.ro] 12 Mar 2018") Safe Local Exploration for Replanning in Cluttered Unknown Environments for Micro-Aerial Vehicles Helen Oleynikova, Zachary Taylor, Roland Siegwart, and Juan Nieto Autonomous Systems Lab, ETH Zürich arxiv:1710.00604v2
Safe Local Exploration for Replanning in Cluttered Unknown Environments for Micro-Aerial Vehicles Helen Oleynikova, Zachary Taylor, Roland Siegwart, and Juan Nieto Autonomous Systems Lab, ETH Zürich arxiv:1710.00604v2
Localization, Mapping and Exploration with Multiple Robots. Dr. Daisy Tang
 Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
Ensemble of Bayesian Filters for Loop Closure Detection
 Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Gaussian Processes for Robotics. McGill COMP 765 Oct 24 th, 2017
 Gaussian Processes for Robotics McGill COMP 765 Oct 24 th, 2017 A robot must learn Modeling the environment is sometimes an end goal: Space exploration Disaster recovery Environmental monitoring Other
Gaussian Processes for Robotics McGill COMP 765 Oct 24 th, 2017 A robot must learn Modeling the environment is sometimes an end goal: Space exploration Disaster recovery Environmental monitoring Other
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
ICRA 2016 Tutorial on SLAM. Graph-Based SLAM and Sparsity. Cyrill Stachniss
 ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
3D Collision Avoidance for Navigation in Unstructured Environments
 3D Collision Avoidance for Navigation in Unstructured Environments Armin Hornung Humanoid Robots Lab, University of Freiburg May 5, 2011 Motivation Personal robots are to operate in arbitrary complex environments:
3D Collision Avoidance for Navigation in Unstructured Environments Armin Hornung Humanoid Robots Lab, University of Freiburg May 5, 2011 Motivation Personal robots are to operate in arbitrary complex environments:
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Implementation of Odometry with EKF for Localization of Hector SLAM Method
 Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
CVPR 2014 Visual SLAM Tutorial Efficient Inference
 CVPR 2014 Visual SLAM Tutorial Efficient Inference kaess@cmu.edu The Robotics Institute Carnegie Mellon University The Mapping Problem (t=0) Robot Landmark Measurement Onboard sensors: Wheel odometry Inertial
CVPR 2014 Visual SLAM Tutorial Efficient Inference kaess@cmu.edu The Robotics Institute Carnegie Mellon University The Mapping Problem (t=0) Robot Landmark Measurement Onboard sensors: Wheel odometry Inertial
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
State Estimation for Continuous-Time Systems with Perspective Outputs from Discrete Noisy Time-Delayed Measurements
 State Estimation for Continuous-Time Systems with Perspective Outputs from Discrete Noisy Time-Delayed Measurements António Pedro Aguiar aguiar@ece.ucsb.edu João Pedro Hespanha hespanha@ece.ucsb.edu Dept.
State Estimation for Continuous-Time Systems with Perspective Outputs from Discrete Noisy Time-Delayed Measurements António Pedro Aguiar aguiar@ece.ucsb.edu João Pedro Hespanha hespanha@ece.ucsb.edu Dept.
Outline Sensors. EE Sensors. H.I. Bozma. Electric Electronic Engineering Bogazici University. December 13, 2017
 Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Real-Time Vision-Based State Estimation and (Dense) Mapping
 Mapping") Real-Time Vision-Based State Estimation and (Dense) Mapping Stefan Leutenegger IROS 2016 Workshop on State Estimation and Terrain Perception for All Terrain Mobile Robots The Perception-Action Cycle in
Real-Time Vision-Based State Estimation and (Dense) Mapping Stefan Leutenegger IROS 2016 Workshop on State Estimation and Terrain Perception for All Terrain Mobile Robots The Perception-Action Cycle in
Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage Dr. Jürgen Sturm Agenda for Today Exploration with a single robot Coordinated
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage Dr. Jürgen Sturm Agenda for Today Exploration with a single robot Coordinated
Collaborative 6DoF Relative Pose Estimation for two UAVs with Overlapping Fields of View
 Collaborative 6DoF Relative Pose Estimation for two UVs with Overlapping Fields of View Marco Karrer1, Mohit garwal1, Mina Kamel2, Roland Siegwart2 and Margarita Chli1 1 Vision for Robotics Lab and 2 utonomous
Collaborative 6DoF Relative Pose Estimation for two UVs with Overlapping Fields of View Marco Karrer1, Mohit garwal1, Mina Kamel2, Roland Siegwart2 and Margarita Chli1 1 Vision for Robotics Lab and 2 utonomous
Basics of Localization, Mapping and SLAM. Jari Saarinen Aalto University Department of Automation and systems Technology
 Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
A Reactive Bearing Angle Only Obstacle Avoidance Technique for Unmanned Ground Vehicles
 Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 54 A Reactive Bearing Angle Only Obstacle Avoidance Technique for
Proceedings of the International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 15-16 2014 Paper No. 54 A Reactive Bearing Angle Only Obstacle Avoidance Technique for
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
GOMSF: Graph-Optimization based Multi-Sensor Fusion for robust UAV pose estimation
 GOMSF: Graph-Optimization based Multi-Sensor Fusion for robust UAV pose estimation Ruben Mascaro1, Lucas Teixeira1, Timo Hinzmann, Roland Siegwart and Margarita Chli1 1 Vision for Robotics Lab, ETH Zurich,
GOMSF: Graph-Optimization based Multi-Sensor Fusion for robust UAV pose estimation Ruben Mascaro1, Lucas Teixeira1, Timo Hinzmann, Roland Siegwart and Margarita Chli1 1 Vision for Robotics Lab, ETH Zurich,
Creating Affordable and Reliable Autonomous Vehicle Systems
 Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Creating Affordable and Reliable Autonomous Vehicle Systems Shaoshan Liu shaoshan.liu@perceptin.io Autonomous Driving Localization Most crucial task of autonomous driving Solutions: GNSS but withvariations,
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
EE631 Cooperating Autonomous Mobile Robots
 EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
On Optimizing Command and Control Structures
 On Optimizing Command and Control Structures 16th ICCRTS Gary F. Wheatley Best Paper Presentation Kevin Schultz, David Scheidt, {kevin.schultz, david.scheidt}@jhuapl.edu This work was funded in part by
On Optimizing Command and Control Structures 16th ICCRTS Gary F. Wheatley Best Paper Presentation Kevin Schultz, David Scheidt, {kevin.schultz, david.scheidt}@jhuapl.edu This work was funded in part by
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors