3D Point Cloud Processing
|
|
|
- Griselda Anderson
- 6 years ago
- Views:
Transcription

1 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single eye, complete with iris and pupil. Thus, the image is called "Self Portrait Duckling". Dr. with Andreas Nüchter Application: Mobile Mapping Prof. 1
")
2 Scanning while Driving (video) 2



3 Mobile Laser Scanning Systems Experimental Professional 3
 Unwind the laser measurements with the trajectory to create a 3D point")
4 State of the Art For all sensors determine the position and orientation on the vehicle (calibration) Data Acquisition Extract the trajectory of the vehicle from the sensor data (Kalman-Filter) Unwind the laser measurements with the trajectory to create a 3D point cloud. 4
5 Automatic System Calibration Construct a calibration vector Treat the unwinding as a function The point cloud represents samples from a probability density function Simplified entropy measure 5
6 Efficient Calibration Evaluating the entropy is in O(n²) Reduction of the point cloud n becomes smaller Smaller contribution to the error function in the search space Reduction of point pairs Consider only pairs with minimal time difference Consider only closest points Minimization of the error function where 6 is in O(n log n) (~20 minutes with Powel s algorithm)
")


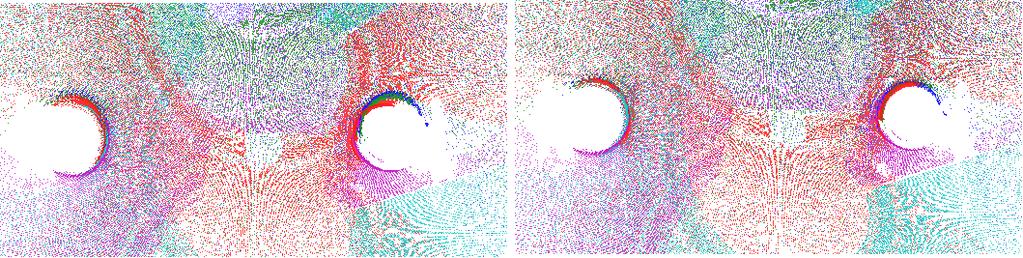
7 Calibration Experiment (1) Reference model: 3D plane model from terrestrial scanning Compare point cloud with model 7
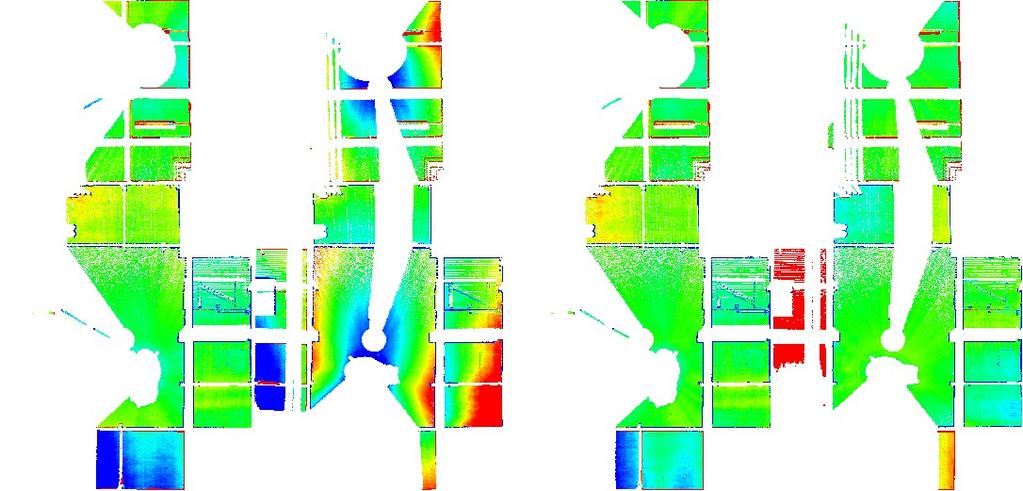

8 Calibration Experiment (1) 8


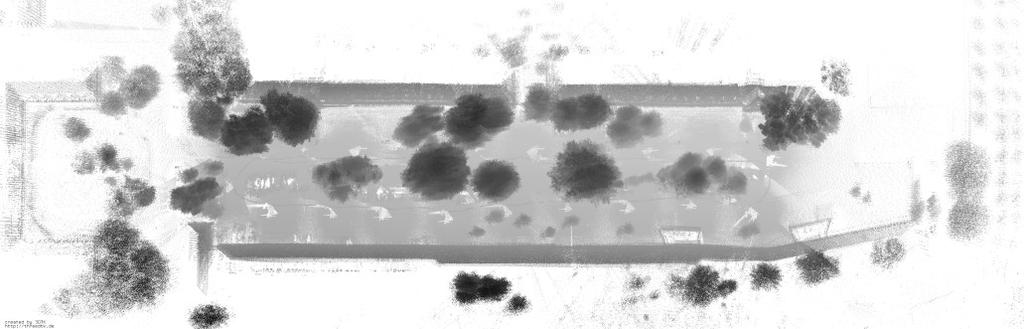
9 Calibration Experiment (2) Ostia Antica in Rom Environment less structured No ground truth model available 9
10 Calibration Experiment (2) 10
11 Calibration Experiment (2) 11
12 Calibration Experiment (2) 12



13 Further Sources of Errors no GPS lousy IMU bad GPS no IMU 13
14 Semi-Rigid Registration Goal: Optimize trajectory No or only small time discretization (< 10 ms) Ideal discretization at every point measurement Ansatz: Extension of the global ICP algorithm / Graph-SLAM Modeling Trajectory Every is a vehicle pose at time IMU / odometry estimate GPS estimate Laser scanner / scan matching 14


15 Calculation of Unwind the laser measurements with the trajectory to create an initial 3D point cloud. Compute correspondences using a modified nearest-neighbor search Consider the following scenarios: 1 2D scanner 2 2D scanners 1 rot. 3D scanner 15


16 Optimization of the Trajectory Global error function Minimization by Solving by Sparse Choleskey Decomposition by T. Davis Also possible: global ICP 16
17 Overview: Algorithm Semi-Rigid SLAM 1. Calculate the pose estimates and 2. Extract a 3D point cloud from a current trajectory estimate and the system calibration 3. Calculate an oc-tree for storing the 3D points (including the time stamp) 4. Compute closest points and an estimate for 5. Update the trajectory 6. Repeat step 2 5 until convergence 17
18 Experiment I 18
19 Experiment II Data and analysis done by TopScan GmbH, Rheine (Dr. Joachim Lindenberger) 19
20 Experiment II Data and analysis done by TopScan GmbH, Rheine (Dr. Joachim Lindenberger) 20



21 Experiment II Data and analysis done by TopScan GmbH, Rheine (Dr. Joachim Lindenberger) 21
22 Experiment II 22
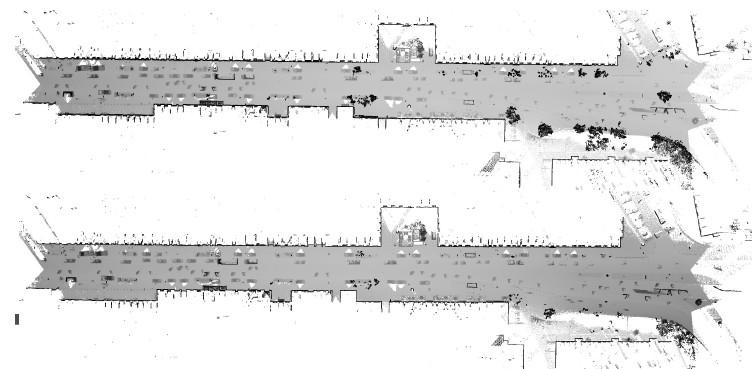
23 Experiment II 23

24 Experiment II 24 Overall precision after registration is 2.3 cm


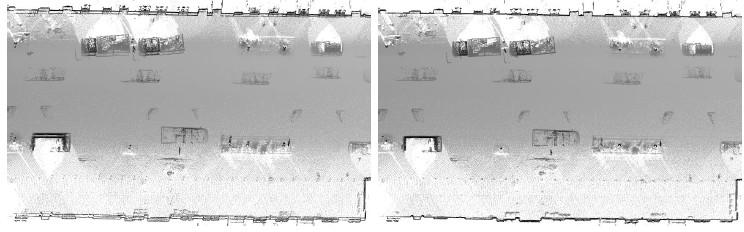
25 Experiment III 25
26 Experiment III Acquired by Riegl GmbH in Salzburg 26

27 Experiment III Acquired by Riegl GmbH in Salzburg 27


28 Scan Patterns 28

29 Scan Patterns 29



30 Scan Patterns (video) 30
Large-Scale. Point Cloud Processing Tutorial. Application: Mobile Mapping
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
Towards Optimal 3D Point Clouds
 By Andreas Nüchter, Jan Elseberg and Dorit Borrmann, Germany feature Automation in 3D Mobile Laser Scanning Towards Optimal 3D Point Clouds Motivated by the increasing need for rapid characterisation of
By Andreas Nüchter, Jan Elseberg and Dorit Borrmann, Germany feature Automation in 3D Mobile Laser Scanning Towards Optimal 3D Point Clouds Motivated by the increasing need for rapid characterisation of
Large-Scale 3D Point Cloud Processing Tutorial 2013
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Features The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in Prof.
Large-Scale 3D Point Cloud Processing Tutorial 2013 Features The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in Prof.
Large-Scale. Point Cloud Processing Tutorial. Basic Data Structures
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Basic Data Structures The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as Prof.
Large-Scale 3D Point Cloud Processing Tutorial 2013 Basic Data Structures The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as Prof.
6DOF Semi-Rigid SLAM for Mobile Scanning
 6DOF Semi-Rigid SLAM for Mobile Scanning Jan Elseberg, Dorit Borrmann, and Andreas Nüchter Abstract The terrestrial acquisition of 3D point clouds by laser range finders has recently moved to mobile platforms.
6DOF Semi-Rigid SLAM for Mobile Scanning Jan Elseberg, Dorit Borrmann, and Andreas Nüchter Abstract The terrestrial acquisition of 3D point clouds by laser range finders has recently moved to mobile platforms.
Towards Mobile Mapping of Underground Mines. Andreas Nüchter, Jan Elseberg, Peter Janotta
 Towards Mobile Mapping of Underground Mines Andreas Nüchter, Jan Elseberg, Peter Janotta Informatics VII Robotics and Telematics Julius-Maximilian University of Würzburg Am Hubland, D-97074 Würzburg, Germany
Towards Mobile Mapping of Underground Mines Andreas Nüchter, Jan Elseberg, Peter Janotta Informatics VII Robotics and Telematics Julius-Maximilian University of Würzburg Am Hubland, D-97074 Würzburg, Germany
MIRROR IDENTIFICATION AND CORRECTION OF 3D POINT CLOUDS
 MIRROR IDENTIFICATION AND CORRECTION OF 3D POINT CLOUDS P.-F. Käshammer and A. Nüchter Informatics VII Robotics and Telematics Julius-Maximilians University Würzburg, Germany andreas@nuechti.de Commission
MIRROR IDENTIFICATION AND CORRECTION OF 3D POINT CLOUDS P.-F. Käshammer and A. Nüchter Informatics VII Robotics and Telematics Julius-Maximilians University Würzburg, Germany andreas@nuechti.de Commission
Rigorous Scan Data Adjustment for kinematic LIDAR systems
 Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
The Efficient Extension of Globally Consistent Scan Matching to 6 DoF
 The Efficient Extension of Globally Consistent Scan Matching to 6 DoF Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas Nüchter, Joachim Hertzberg 1 / 20 Outline 1 Introduction 2 Algorithm 3 Performance
The Efficient Extension of Globally Consistent Scan Matching to 6 DoF Dorit Borrmann, Jan Elseberg, Kai Lingemann, Andreas Nüchter, Joachim Hertzberg 1 / 20 Outline 1 Introduction 2 Algorithm 3 Performance
6D SLAM with Kurt3D. Andreas Nüchter, Kai Lingemann, Joachim Hertzberg
 6D SLAM with Kurt3D Andreas Nüchter, Kai Lingemann, Joachim Hertzberg University of Osnabrück, Institute of Computer Science Knowledge Based Systems Research Group Albrechtstr. 28, D-4969 Osnabrück, Germany
6D SLAM with Kurt3D Andreas Nüchter, Kai Lingemann, Joachim Hertzberg University of Osnabrück, Institute of Computer Science Knowledge Based Systems Research Group Albrechtstr. 28, D-4969 Osnabrück, Germany
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Laser scanners with echo digitization for full waveform analysis
 Laser scanners with echo digitization for full waveform analysis Peter Rieger, Andreas Ullrich, Rainer Reichert RIEGL Laser Measurement Systems GmbH DI Peter Rieger Project Management RIEGL LMS GmbH A-3580
Laser scanners with echo digitization for full waveform analysis Peter Rieger, Andreas Ullrich, Rainer Reichert RIEGL Laser Measurement Systems GmbH DI Peter Rieger Project Management RIEGL LMS GmbH A-3580
3D Maps. Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring Bremen 1
 Towards Semantic 3D Maps Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen 1 Acknowledgements I would like to thank the following researchers for joint work and inspiration
Towards Semantic 3D Maps Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen 1 Acknowledgements I would like to thank the following researchers for joint work and inspiration
A SENSOR SKID FOR PRECISE 3D MODELING OF PRODUCTION LINES
 A SENSOR SKID FOR PRECISE 3D MODELING OF PRODUCTION LINES JanElseberg, DoritBorrmann a,johannes Schauer b,andreas Nüchter a, DirkKoriath c, andulrichrautenberg c a Informatics VII:Robotics andtelematics,julius-maximilians-university
A SENSOR SKID FOR PRECISE 3D MODELING OF PRODUCTION LINES JanElseberg, DoritBorrmann a,johannes Schauer b,andreas Nüchter a, DirkKoriath c, andulrichrautenberg c a Informatics VII:Robotics andtelematics,julius-maximilians-university
Synchronization aspects of sensor and data fusion in a research multi-sensor-system
 Synchronization aspects of sensor and data fusion in a research multi-sensor-system MCG 2016, Vichy, France 5 th International Conference on Machine Control & Guidance October 5, 2016 Jens-André Paffenholz,
Synchronization aspects of sensor and data fusion in a research multi-sensor-system MCG 2016, Vichy, France 5 th International Conference on Machine Control & Guidance October 5, 2016 Jens-André Paffenholz,
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements
 Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
RIEGL LMS-Q780. The Versatile, High Altitude Airborne LIDAR Sensor
 RIEGL LMS-Q780 3050m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
RIEGL LMS-Q780 3050m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
RIEGL LMS-Q780. The Versatile, High Altitude Airborne LIDAR Sensor
 RIEGL LMS-Q780 4700m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
RIEGL LMS-Q780 4700m 400kHz The full waveform airborne laser scanner offers great versatility, accuracy, and data quality. The scanner enables you to successfully deliver your projects with industry leading
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
Detection and Tracking of Moving Objects Using 2.5D Motion Grids
 Detection and Tracking of Moving Objects Using 2.5D Motion Grids Alireza Asvadi, Paulo Peixoto and Urbano Nunes Institute of Systems and Robotics, University of Coimbra September 2015 1 Outline: Introduction
Detection and Tracking of Moving Objects Using 2.5D Motion Grids Alireza Asvadi, Paulo Peixoto and Urbano Nunes Institute of Systems and Robotics, University of Coimbra September 2015 1 Outline: Introduction
REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES
 REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES T. Yamakawa a, K. Fukano a,r. Onodera a, H. Masuda a, * a Dept. of Mechanical Engineering and Intelligent Systems, The University of Electro-Communications,
REFINEMENT OF COLORED MOBILE MAPPING DATA USING INTENSITY IMAGES T. Yamakawa a, K. Fukano a,r. Onodera a, H. Masuda a, * a Dept. of Mechanical Engineering and Intelligent Systems, The University of Electro-Communications,
Boresight alignment method for mobile laser scanning systems
 Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Evaluation of Methods for Robotic Mapping of Cultural Heritage Sites
 Evaluation of Methods for Robotic Mapping of Cultural Heritage Sites Dorit Borrmann Robin Hess Daniel Eck Hamidreza Houshiar Andreas Nüchter Klaus Schilling Informatics VII: Robotics and Telematics, University
Evaluation of Methods for Robotic Mapping of Cultural Heritage Sites Dorit Borrmann Robin Hess Daniel Eck Hamidreza Houshiar Andreas Nüchter Klaus Schilling Informatics VII: Robotics and Telematics, University
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
If the robot moves from F l to F r, and observes the coordinates of the same physical point as. l p and. coordinates are related by [9]
![If the robot moves from F l to F r, and observes the coordinates of the same physical point as. l p and. coordinates are related by [9]](/thumbs/80/81472349.jpg "If the robot moves from F l to F r, and observes the coordinates of the same physical point as. l p and. coordinates are related by [9]") The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Evaluation of the Robustness of Planar-Patches based 3D-Registration using Marker-based
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Evaluation of the Robustness of Planar-Patches based 3D-Registration using Marker-based
RADLER - A RADial LasER scanning device
 RADLER - A RADial LasER scanning device Dorit Borrmann and Sven Jörissen and Andreas Nüchter Abstract In recent years a wide range of 3D measurement devices for various applications has been proposed.
RADLER - A RADial LasER scanning device Dorit Borrmann and Sven Jörissen and Andreas Nüchter Abstract In recent years a wide range of 3D measurement devices for various applications has been proposed.
THE RANGER-UAV FEATURES
 THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
Refined Non-Rigid Registration of a Panoramic Image Sequence to a LiDAR Point Cloud
 Refined Non-Rigid Registration of a Panoramic Image Sequence to a LiDAR Point Cloud Arjen Swart 1,2, Jonathan Broere 1, Remco Veltkamp 2, and Robby Tan 2 1 Cyclomedia Technology BV, Waardenburg, the Netherlands
Refined Non-Rigid Registration of a Panoramic Image Sequence to a LiDAR Point Cloud Arjen Swart 1,2, Jonathan Broere 1, Remco Veltkamp 2, and Robby Tan 2 1 Cyclomedia Technology BV, Waardenburg, the Netherlands
LOAM: LiDAR Odometry and Mapping in Real Time
 LOAM: LiDAR Odometry and Mapping in Real Time Aayush Dwivedi (14006), Akshay Sharma (14062), Mandeep Singh (14363) Indian Institute of Technology Kanpur 1 Abstract This project deals with online simultaneous
LOAM: LiDAR Odometry and Mapping in Real Time Aayush Dwivedi (14006), Akshay Sharma (14062), Mandeep Singh (14363) Indian Institute of Technology Kanpur 1 Abstract This project deals with online simultaneous
TARGET-FREE EXTRINSIC CALIBRATION OF A MOBILE MULTI-BEAM LIDAR SYSTEM
 ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume II-3/W5, 2015 TARGET-FREE EXTRINSIC CALIBRATION OF A MOBILE MULTI-BEAM LIDAR SYSTEM H. Nouiraa, J. E. Deschauda,
ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume II-3/W5, 2015 TARGET-FREE EXTRINSIC CALIBRATION OF A MOBILE MULTI-BEAM LIDAR SYSTEM H. Nouiraa, J. E. Deschauda,
Automatic Construction of Polygonal Maps From Point Cloud Data
 Automatic Construction of Polygonal Maps From Point Cloud Data Thomas Wiemann, Andres Nüchter, Kai Lingemann, Stefan Stiene, and Joachim Hertzberg Abstract This paper presents a novel approach to create
Automatic Construction of Polygonal Maps From Point Cloud Data Thomas Wiemann, Andres Nüchter, Kai Lingemann, Stefan Stiene, and Joachim Hertzberg Abstract This paper presents a novel approach to create
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
6D SLAM PRELIMINARY REPORT ON CLOSING THE LOOP IN SIX DIMENSIONS
 6D SLAM PRELIMINARY REPORT ON CLOSING THE LOOP IN SIX DIMENSIONS Hartmut Surmann Kai Lingemann Andreas Nüchter Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems Schloss Birlinghoven
6D SLAM PRELIMINARY REPORT ON CLOSING THE LOOP IN SIX DIMENSIONS Hartmut Surmann Kai Lingemann Andreas Nüchter Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems Schloss Birlinghoven
EVALUATING CONTINUOUS-TIME SLAM USING A PREDEFINED TRAJECTORY PROVIDED BY A ROBOTIC ARM
 EVALUATING CONTINUOUS-TIME SLAM USING A PREDEFINED TRAJECTORY PROVIDED BY A ROBOTIC ARM Bertram Koch, Robin Leblebici, Angel Martell, Sven Jörissen, Klaus Schilling, and Andreas Nüchter Informatics VII
EVALUATING CONTINUOUS-TIME SLAM USING A PREDEFINED TRAJECTORY PROVIDED BY A ROBOTIC ARM Bertram Koch, Robin Leblebici, Angel Martell, Sven Jörissen, Klaus Schilling, and Andreas Nüchter Informatics VII
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Recent developments in laser scanning
 Recent developments in laser scanning Kourosh Khoshelham With contributions from: Sander Oude Elberink, Guorui Li, Xinwei Fang, Sudan Xu and Lucia Diaz Vilarino Why laser scanning? Laser scanning accurate
Recent developments in laser scanning Kourosh Khoshelham With contributions from: Sander Oude Elberink, Guorui Li, Xinwei Fang, Sudan Xu and Lucia Diaz Vilarino Why laser scanning? Laser scanning accurate
3D-2D Laser Range Finder calibration using a conic based geometry shape
 3D-2D Laser Range Finder calibration using a conic based geometry shape Miguel Almeida 1, Paulo Dias 1, Miguel Oliveira 2, Vítor Santos 2 1 Dept. of Electronics, Telecom. and Informatics, IEETA, University
3D-2D Laser Range Finder calibration using a conic based geometry shape Miguel Almeida 1, Paulo Dias 1, Miguel Oliveira 2, Vítor Santos 2 1 Dept. of Electronics, Telecom. and Informatics, IEETA, University
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
First scan matching algorithms. Alberto Quattrini Li University of South Carolina
 First scan matching algorithms Alberto Quattrini Li 2015-10-22 University of South Carolina Robot mapping through scan-matching Framework for consistent registration of multiple frames of measurements
First scan matching algorithms Alberto Quattrini Li 2015-10-22 University of South Carolina Robot mapping through scan-matching Framework for consistent registration of multiple frames of measurements
arxiv: v1 [cs.ro] 23 Feb 2018
![arxiv: v1 [cs.ro] 23 Feb 2018](/thumbs/84/89142674.jpg "arxiv: v1 [cs.ro] 23 Feb 2018") IMLS-SLAM: scan-to-model matching based on 3D data Jean-Emmanuel Deschaud 1 1 MINES ParisTech, PSL Research University, Centre for Robotics, 60 Bd St Michel 75006 Paris, France arxiv:1802.08633v1 [cs.ro]
IMLS-SLAM: scan-to-model matching based on 3D data Jean-Emmanuel Deschaud 1 1 MINES ParisTech, PSL Research University, Centre for Robotics, 60 Bd St Michel 75006 Paris, France arxiv:1802.08633v1 [cs.ro]
TLS Parameters, Workflows and Field Methods
 TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
TLS Parameters, Workflows and Field Methods Marianne Okal, UNAVCO June 20 th, 2014 How a Lidar instrument works (Recap) Transmits laser signals and measures the reflected light to create 3D point clouds.
A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS
 A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS M. Hassanein a, *, A. Moussa a,b, N. El-Sheimy a a Department of Geomatics Engineering, University of Calgary, Calgary, Alberta, Canada
A NEW AUTOMATIC SYSTEM CALIBRATION OF MULTI-CAMERAS AND LIDAR SENSORS M. Hassanein a, *, A. Moussa a,b, N. El-Sheimy a a Department of Geomatics Engineering, University of Calgary, Calgary, Alberta, Canada
ACCURACY OF EXTERIOR ORIENTATION FOR A RANGE CAMERA
 ACCURACY OF EXTERIOR ORIENTATION FOR A RANGE CAMERA Jan Boehm, Timothy Pattinson Institute for Photogrammetry, University of Stuttgart, Germany jan.boehm@ifp.uni-stuttgart.de Commission V, WG V/2, V/4,
ACCURACY OF EXTERIOR ORIENTATION FOR A RANGE CAMERA Jan Boehm, Timothy Pattinson Institute for Photogrammetry, University of Stuttgart, Germany jan.boehm@ifp.uni-stuttgart.de Commission V, WG V/2, V/4,
Ford Campus Vision and Laser Data Set
 1 Ford Campus Vision and Laser Data Set Gaurav Pandey*, Ryan Eustice* and James McBride** *University of Michigan, Ann Arbor, MI **Ford Motor Company Research, Dearborn, MI Abstract This paper describes
1 Ford Campus Vision and Laser Data Set Gaurav Pandey*, Ryan Eustice* and James McBride** *University of Michigan, Ann Arbor, MI **Ford Motor Company Research, Dearborn, MI Abstract This paper describes
Virtual Testbeds for Planetary Exploration: The Self Localization Aspect
 Virtual Testbeds for Planetary Exploration: The Self Localization Aspect, RWTH Aachen University Björn Sondermann Markus Emde Jürgen Roßmann 1 Content Previous Work Self Localization in terrestrial forestry
Virtual Testbeds for Planetary Exploration: The Self Localization Aspect, RWTH Aachen University Björn Sondermann Markus Emde Jürgen Roßmann 1 Content Previous Work Self Localization in terrestrial forestry
Graph-based SLAM (Simultaneous Localization And Mapping) for Bridge Inspection Using UAV (Unmanned Aerial Vehicle)
 for Bridge Inspection Using UAV (Unmanned Aerial Vehicle)") Graph-based SLAM (Simultaneous Localization And Mapping) for Bridge Inspection Using UAV (Unmanned Aerial Vehicle) Taekjun Oh 1), Sungwook Jung 2), Seungwon Song 3), and Hyun Myung 4) 1), 2), 3), 4) Urban
Graph-based SLAM (Simultaneous Localization And Mapping) for Bridge Inspection Using UAV (Unmanned Aerial Vehicle) Taekjun Oh 1), Sungwook Jung 2), Seungwon Song 3), and Hyun Myung 4) 1), 2), 3), 4) Urban
2/19/2018. Who are we? Who am I? What is Scanning? How does scanning work? How does scanning work? Scanning for Today s Surveyors
 2/19/2018 Who are we? Scanning for Today s Surveyors Survey, GIS, and Construction dealer Founded in 1988 Employee Owned Headquartered in Bismarck, ND States covered: ND, SD, MN, MT, WY, CO, UT, ID, WA,
2/19/2018 Who are we? Scanning for Today s Surveyors Survey, GIS, and Construction dealer Founded in 1988 Employee Owned Headquartered in Bismarck, ND States covered: ND, SD, MN, MT, WY, CO, UT, ID, WA,
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
A STUDY OF SCAN PATTERNS FOR MOBILE MAPPING
 A STUDY OF SCAN PATTERNS FOR MOBILE MAPPING JanElseberg a,doritborrmann b andandreas Nüchter b a School of Engineeringand Science, AutomationGroup, Jacobs Universityof BremengGmbH, Campus Ring 1, Bremen
A STUDY OF SCAN PATTERNS FOR MOBILE MAPPING JanElseberg a,doritborrmann b andandreas Nüchter b a School of Engineeringand Science, AutomationGroup, Jacobs Universityof BremengGmbH, Campus Ring 1, Bremen
TerraMatch. Introduction
 TerraMatch Introduction Error sources Interior in LRF Why TerraMatch? Errors in laser distance measurement Scanning mirror errors Exterior in trajectories Errors in position (GPS) Errors in orientation
TerraMatch Introduction Error sources Interior in LRF Why TerraMatch? Errors in laser distance measurement Scanning mirror errors Exterior in trajectories Errors in position (GPS) Errors in orientation
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots
 Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
Building Reliable 2D Maps from 3D Features
 Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Geosmart Asia Automated Scan Data Registration for Improving TLS Data Acquisition Efficiency. Thomas Gaisecker. April, 2018
 Geosmart Asia 2018 Automated Scan Data Registration for Improving TLS Data Acquisition Efficiency Thomas Gaisecker April, 2018 Content RIEGL VZ-400i/VZ-2000i key facts Hardware/Firmeware Architecture Onboard
Geosmart Asia 2018 Automated Scan Data Registration for Improving TLS Data Acquisition Efficiency Thomas Gaisecker April, 2018 Content RIEGL VZ-400i/VZ-2000i key facts Hardware/Firmeware Architecture Onboard
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
Terrasolid European Training Event
 Terrasolid European Training Event February 13 th 18 th, 2012 - Levi / Finland Nikolaus STUDNICKA Business Development Manager RIEGL Laser Measurement Systems GmbH Content Mobile Laser Scanning System
Terrasolid European Training Event February 13 th 18 th, 2012 - Levi / Finland Nikolaus STUDNICKA Business Development Manager RIEGL Laser Measurement Systems GmbH Content Mobile Laser Scanning System
HAWAII KAUAI Survey Report. LIDAR System Description and Specifications
 HAWAII KAUAI Survey Report LIDAR System Description and Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Navajo Piper
HAWAII KAUAI Survey Report LIDAR System Description and Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Navajo Piper
LiForest Software White paper. TRGS, 3070 M St., Merced, 93610, Phone , LiForest
 0 LiForest LiForest is a platform to manipulate large LiDAR point clouds and extract useful information specifically for forest applications. It integrates a variety of advanced LiDAR processing algorithms
0 LiForest LiForest is a platform to manipulate large LiDAR point clouds and extract useful information specifically for forest applications. It integrates a variety of advanced LiDAR processing algorithms
3D Laserscanner App for Indoor Measurements
 3D Laserscanner App for Indoor Measurements V&R Vision & Robotics GmbH Prof. Dr.-Ing. Dietrich Paulus, Dipl.-Inform. Johannes Pellenz info@vision-robotics.de 20. April 2011 vr 3D Laserscanner App for Indoor
3D Laserscanner App for Indoor Measurements V&R Vision & Robotics GmbH Prof. Dr.-Ing. Dietrich Paulus, Dipl.-Inform. Johannes Pellenz info@vision-robotics.de 20. April 2011 vr 3D Laserscanner App for Indoor
Planning Robot Motion for 3D Digitalization of Indoor Environments
 Planning Robot Motion for 3D Digitalization of Indoor Environments Andreas Nüchter Hartmut Surmann Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems Schloss Birlinghoven D-53754
Planning Robot Motion for 3D Digitalization of Indoor Environments Andreas Nüchter Hartmut Surmann Joachim Hertzberg Fraunhofer Institute for Autonomous Intelligent Systems Schloss Birlinghoven D-53754
F1/10 th Autonomous Racing. Localization. Nischal K N
 F1/10 th Autonomous Racing Localization Nischal K N System Overview Mapping Hector Mapping Localization Path Planning Control System Overview Mapping Hector Mapping Localization Adaptive Monte Carlo Localization
F1/10 th Autonomous Racing Localization Nischal K N System Overview Mapping Hector Mapping Localization Path Planning Control System Overview Mapping Hector Mapping Localization Adaptive Monte Carlo Localization
POINT CLOUD REGISTRATION: CURRENT STATE OF THE SCIENCE. Matthew P. Tait
 POINT CLOUD REGISTRATION: CURRENT STATE OF THE SCIENCE Matthew P. Tait Content 1. Quality control: Analyzing the true errors in Terrestrial Laser Scanning (TLS) 2. The prospects for automatic cloud registration
POINT CLOUD REGISTRATION: CURRENT STATE OF THE SCIENCE Matthew P. Tait Content 1. Quality control: Analyzing the true errors in Terrestrial Laser Scanning (TLS) 2. The prospects for automatic cloud registration
Semantic Mapping and Reasoning Approach for Mobile Robotics
 Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
Semantic Mapping and Reasoning Approach for Mobile Robotics Caner GUNEY, Serdar Bora SAYIN, Murat KENDİR, Turkey Key words: Semantic mapping, 3D mapping, probabilistic, robotic surveying, mine surveying
STEREO IMAGE POINT CLOUD AND LIDAR POINT CLOUD FUSION FOR THE 3D STREET MAPPING
 STEREO IMAGE POINT CLOUD AND LIDAR POINT CLOUD FUSION FOR THE 3D STREET MAPPING Yuan Yang, Ph.D. Student Zoltan Koppanyi, Post-Doctoral Researcher Charles K Toth, Research Professor SPIN Lab The University
STEREO IMAGE POINT CLOUD AND LIDAR POINT CLOUD FUSION FOR THE 3D STREET MAPPING Yuan Yang, Ph.D. Student Zoltan Koppanyi, Post-Doctoral Researcher Charles K Toth, Research Professor SPIN Lab The University
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg
 Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg") Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES
 FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
arxiv: v1 [cs.ro] 19 Jun 2017
![arxiv: v1 [cs.ro] 19 Jun 2017](/thumbs/83/88611277.jpg "arxiv: v1 [cs.ro] 19 Jun 2017") LiDAR point clouds correction acquired from a moving car based on CAN-bus data Pierre Merriaux 1, Yohan Dupuis 2, Rémi Boutteau 1, Pascal Vasseur 3 and Xavier Savatier 1 arxiv:1706.05886v1 [cs.ro] 19 Jun
LiDAR point clouds correction acquired from a moving car based on CAN-bus data Pierre Merriaux 1, Yohan Dupuis 2, Rémi Boutteau 1, Pascal Vasseur 3 and Xavier Savatier 1 arxiv:1706.05886v1 [cs.ro] 19 Jun
Integrated Sensing Framework for 3D Mapping in Outdoor Navigation
 Integrated Sensing Framework for 3D Mapping in Outdoor Navigation R. Katz, N. Melkumyan, J. Guivant, T. Bailey, J. Nieto and E. Nebot ARC Centre of Excellence for Autonomous Systems Australian Centre for
Integrated Sensing Framework for 3D Mapping in Outdoor Navigation R. Katz, N. Melkumyan, J. Guivant, T. Bailey, J. Nieto and E. Nebot ARC Centre of Excellence for Autonomous Systems Australian Centre for
A MAN-PORTABLE, IMU-FREE MOBILE MAPPING SYSTEM
 A MAN-PORTABLE, IMU-FREE MOBILE MAPPING SYSTEM Andreas Nüchter, Dorit Borrmann, Philipp Koch +, Markus Kühn +, Stefan May + Informatics VII Robotics and Telematics Julius-Maximilians University Würzburg,
A MAN-PORTABLE, IMU-FREE MOBILE MAPPING SYSTEM Andreas Nüchter, Dorit Borrmann, Philipp Koch +, Markus Kühn +, Stefan May + Informatics VII Robotics and Telematics Julius-Maximilians University Würzburg,
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Introduction to robot algorithms CSE 410/510
 Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Re: Developing Requirements for Mobile LiDAR Data (#1015)
") TM Tech Notes Certainty 3D April 10, 2012 To: General Release From: Ted Knaak Certainty 3D, Inc. Re: Developing Requirements for Mobile LiDAR Data (#1015) Introduction Recent discussions within the industry
TM Tech Notes Certainty 3D April 10, 2012 To: General Release From: Ted Knaak Certainty 3D, Inc. Re: Developing Requirements for Mobile LiDAR Data (#1015) Introduction Recent discussions within the industry
Towards Online Mobile Mapping Using Inhomogeneous Lidar Data
 Towards Online Mobile Mapping Using Inhomogeneous Lidar Data Michiel Vlaminc 1, Hiep Quang Luong 1, Werner Goeman 2, Peter Veelaert 1 and Wilfried Philips 1 Department of Telecommunications and Information
Towards Online Mobile Mapping Using Inhomogeneous Lidar Data Michiel Vlaminc 1, Hiep Quang Luong 1, Werner Goeman 2, Peter Veelaert 1 and Wilfried Philips 1 Department of Telecommunications and Information
High-precision, consistent EKF-based visual-inertial odometry
 High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
Assessing 3D Point Cloud Fidelity of UAS SfM Software Solutions Over Varying Terrain
 Assessing 3D Point Cloud Fidelity of UAS SfM Software Solutions Over Varying Terrain Michael Schwind, Michael J. Starek (Presenter) 18th Annual JALBTCX Airborne Coastal Mapping and Charting Technical Workshop,
Assessing 3D Point Cloud Fidelity of UAS SfM Software Solutions Over Varying Terrain Michael Schwind, Michael J. Starek (Presenter) 18th Annual JALBTCX Airborne Coastal Mapping and Charting Technical Workshop,
ENGN D Photography / Spring 2018 / SYLLABUS
 ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
ENGN 2502 3D Photography / Spring 2018 / SYLLABUS Description of the proposed course Over the last decade digital photography has entered the mainstream with inexpensive, miniaturized cameras routinely
5. Tests and results Scan Matching Optimization Parameters Influence
 126 5. Tests and results This chapter presents results obtained using the proposed method on simulated and real data. First, it is analyzed the scan matching optimization; after that, the Scan Matching
126 5. Tests and results This chapter presents results obtained using the proposed method on simulated and real data. First, it is analyzed the scan matching optimization; after that, the Scan Matching
Towards Fully-automated Driving. tue-mps.org. Challenges and Potential Solutions. Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, 1 postdoc, 1 project manager, 2 software engineers
RIEGL VZ-400i. Digital Information in 3D Innovations and Best Practises. 4th to 5th of November, Prince Philip House, London
 RIEGL VZ-400i Digital Information in 3D Innovations and Best Practises 4th to 5th of November, Prince Philip House, London London Thames Sunset panorama by Diliff - CC BY 3.0 continuous developments on
RIEGL VZ-400i Digital Information in 3D Innovations and Best Practises 4th to 5th of November, Prince Philip House, London London Thames Sunset panorama by Diliff - CC BY 3.0 continuous developments on
CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING
 CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING Kenta Fukano 1, and Hiroshi Masuda 2 1) Graduate student, Department of Intelligence Mechanical Engineering, The University of Electro-Communications,
CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING Kenta Fukano 1, and Hiroshi Masuda 2 1) Graduate student, Department of Intelligence Mechanical Engineering, The University of Electro-Communications,
Basic Configuration Package
 Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Basic Configuration Package Scanner Basic Configuration for Part-No. HW-VZ4000-01-000-00 3D Laser Scanner (Part-No. HW-VZ4000-00-000-00) - laser transmitter & receiver front end - motorized mirror scanning
Global Non-Rigid Alignment. Benedict J. Brown Katholieke Universiteit Leuven
 Global Non-Rigid Alignment Benedict J. Brown Katholieke Universiteit Leuven 3-D Scanning Pipeline Acquisition Scanners acquire data from a single viewpoint 3-D Scanning Pipeline Acquisition Alignment 3-D
Global Non-Rigid Alignment Benedict J. Brown Katholieke Universiteit Leuven 3-D Scanning Pipeline Acquisition Scanners acquire data from a single viewpoint 3-D Scanning Pipeline Acquisition Alignment 3-D
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
Space Robotics. Ioannis Rekleitis
 Space Robotics Ioannis Rekleitis On-Orbit Servicing of Satellites Work done at the Canadian Space Agency Guy Rouleau, Ioannis Rekleitis, Régent L'Archevêque, Eric Martin, Kourosh Parsa, and Erick Dupuis
Space Robotics Ioannis Rekleitis On-Orbit Servicing of Satellites Work done at the Canadian Space Agency Guy Rouleau, Ioannis Rekleitis, Régent L'Archevêque, Eric Martin, Kourosh Parsa, and Erick Dupuis
RIEGL SYSTEM CONFIGURATION 3D TERRESTRIAL SCANNER LMS-Z620
 Holder for GPS antenna, detachable, for Nikon D70s / D100 / D200 / D300 and for Canon EOS 20D camera mount Part-No. 02RA09-00-011-02 or for Canon EOS 1Ds Mark II camera mount Part-No. 02RA09-00-011-00
Holder for GPS antenna, detachable, for Nikon D70s / D100 / D200 / D300 and for Canon EOS 20D camera mount Part-No. 02RA09-00-011-02 or for Canon EOS 1Ds Mark II camera mount Part-No. 02RA09-00-011-00
Probabilistic Surfel Fusion for Dense LiDAR Mapping Chanoh Park, Soohwan Kim, Peyman Moghadam, Clinton Fookes, Sridha Sridharan
 Probabilistic Surfel Fusion for Dense LiDAR Mapping Chanoh Park, Soohwan Kim, Peyman Moghadam, Clinton Fookes, Sridha Sridharan ICCV workshop 2017 www.data61.csiro.au Introduction Narrow FoV Short sensing
Probabilistic Surfel Fusion for Dense LiDAR Mapping Chanoh Park, Soohwan Kim, Peyman Moghadam, Clinton Fookes, Sridha Sridharan ICCV workshop 2017 www.data61.csiro.au Introduction Narrow FoV Short sensing
Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model
 Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model Ido Ofir Computer Science Department Stanford University December 17, 2011 Abstract This project
Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model Ido Ofir Computer Science Department Stanford University December 17, 2011 Abstract This project
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems
 Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
Probabilistic Matching for 3D Scan Registration
 Probabilistic Matching for 3D Scan Registration Dirk Hähnel Wolfram Burgard Department of Computer Science, University of Freiburg, 79110 Freiburg, Germany Abstract In this paper we consider the problem
Probabilistic Matching for 3D Scan Registration Dirk Hähnel Wolfram Burgard Department of Computer Science, University of Freiburg, 79110 Freiburg, Germany Abstract In this paper we consider the problem
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Colored Point Cloud Registration Revisited Supplementary Material
 Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective