Shape from Silhouettes I
|
|
|
- Byron Skinner
- 6 years ago
- Views:
Transcription

1 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced papers)



2 Shape from silhouettes Slides from Lazebnik, Matusik Yerex and others Automatic 3D Model Construction for Turn-Table Sequences, A.W. Fitzgibbon, G. Cross, and A. Zisserman, SMILE 1998

3 Big Picture Multi-camera environments Dynamic scene Outdoor data capturing with 9 video cameras behind the Ackland Museum, UNC-Chapel Hill, 2006/8/24. Pictured by Jae Hak Kim. N cameras observe the scene and produce N video streams What can we do with this data?

4 Motivation: Movies Sinha Sudipta, UNC PhD 2008
5 Motivation: 3D from Movies Sinha Sudipta, UNC PhD 2008
6 Motivation: 3D from Movies: Replay from arbitrary viewpoints Sinha Sudipta, UNC PhD 2008


7 What can we do with this data? Reconstruct scene objects: shape from silhouettes photo-consistency Calibrate cameras recover epipolar geometry Fit specific models (articulated models)
8 Outline Silhouettes basic concepts extract silhouettes fundamentals about using silhouettes reconstruct shapes from silhouettes use uncertain silhouettes calibrate from silhouettes Perspectives and interesting ideas
 They give information about the global shape of scene")
9 Silhouettes of objects of interest Silhouettes are the regions where objects of interest project in images Silhouettes can generally be obtained using low level information (fast) They give information about the global shape of scene objects
10 How to extract silhouettes? Sometimes done manually (for offline applications, ground truth and verifications) Region based-extraction (automatic) silhouette extraction is a 2-region image segmentation problem, w/ specific solutions: chroma keying (blue, green background) background subtraction (pre-observed static or dynamic background) (refer to segmentation course)

11 How to extract silhouettes? Contour-based extraction focus on silhouette outline instead of region itself snakes, active contours: fitting of a curve to high gradients in image, local optimization Yilmaz&Shah ACCV04
 Background subtraction Simple thresholding Train an appearance model for each pixel, from a")
 Apply the pixel color to the model, then classify it to be")
12 How to extract silhouettes? (cont.) Background subtraction Simple thresholding Train an appearance model for each pixel, from a set of background images RGB 3D-Gaussian model HSV model GMM model Non-parametric model (histogram/kernel density function) Apply the pixel color to the model, then classify it to be foreground/background We will talk about this in more detail later





13 Why use a Visual Hull? Good shape representation Can be computed efficiently No photo-consistency required As bootstrap of many fancy refinement background + foreground background - = foreground
14 Outline Silhouettes basic concepts extract silhouettes fundamentals about using silhouettes reconstruct shapes from silhouettes use uncertain silhouettes calibrate from silhouettes Perspectives and cool ideas

15 What is shape from silhouette? The silhouette, or occluding contour of an object in an image contains some information about the 3D shape of the object. Given a single silhouette image of an object, we know that the 3D object lies inside the volume generated by back-projecting the silhouette area using the camera parameters.
16 What is shape from silhouette? With multiple views of the same object, we can intersect the generalized cones generated by each image, to build a volume which is guaranteed to contain the object. The limiting smallest volume obtainable in this way is known as the visual hull of the object.

17 One-view silhouette geometry
![Multi-view silhouette geometry: the Visual Hull Visual hull Maximal volume consistent with silhouettes [Laurentini94] [Baumgart74] Viewing cone Can be seen as the intersection of viewing cones](/docs-images/77/75929190/images/18-1.jpg "Properties: Containment property: contains real scene objects Converges towards the shape of scene objects minus concavities as N increases Projective structure: simple management of visibility")
18 Multi-view silhouette geometry: the Visual Hull Visual hull Maximal volume consistent with silhouettes [Laurentini94] [Baumgart74] Viewing cone Can be seen as the intersection of viewing cones Properties: Containment property: contains real scene objects Converges towards the shape of scene objects minus concavities as N increases Projective structure: simple management of visibility problems

19 Visual Hull: A 3D Example
20 Outline Silhouettes basic concepts extract silhouettes fundamentals about using silhouettes reconstruct shapes from silhouettes use uncertain silhouettes calibrate from silhouettes Perspectives and cool ideas
21 Algorithms Standard voxel based method Marching Intersections Exact polyhedral methods Image-based visual hulls
22 Voxel based First the object space is split up into a 3D grid of voxels. Each voxel is intersected with each silhouette volume. Only voxels that lie inside all silhouette volumes remain part of the final shape.


23 Visual hull as voxel grid Identify 3D region using voxel carving does a given voxel project inside all silhouettes???? pros: simplicity cons: bad precision/computation time tradeoff

24 Classical voxel grid improvement: octrees Same principle, but refinement through space subdivision [Szeliski TR 90 ]
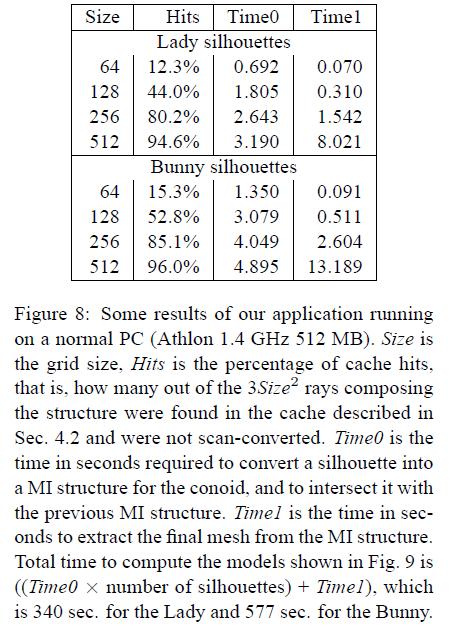
25 Marching intersections Tarini et al., 2002 The object space is again split up into a 3D grid. The grid used is made of 3 sets of rays, rather than voxels. Rays are aligned with the 3 axes, and store points of entry/exit into the volume Each silhouette cone can be converted to the marching intersections data structure. Then merging them is reduced to 1D intersections along each ray. M. Tarini et al, Marching intersections, An efficient Approach to Shape from Silhouette
26 Marching intersections - example
27 Marching intersections -Concept M. Tarini et al, Marching intersections, An efficient Approach to Shape from Silhouette Given a curve Select reference grid Intersections between curve and horizontal and vertical lines: MI Create look-up-table for each non-empty box

28 Marching intersections - Silhouettes Convert conoid structures to MI datastructure Intersection tested in 2D image: purely 2D operation Intersection of conoids: AND operations on MI datastructures


29 Marching intersections - Silhouettes Final step: Convert MI datastructure representing all intersections to triangular mesh
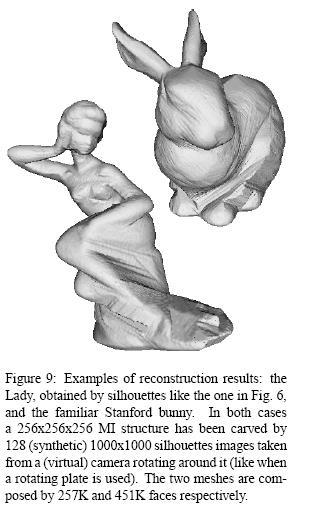
30 Marching intersections - Silhouettes





31 Example: Student Project Compute visual hull with silhouette images from multiple calibrated cameras Compute Silhouette Image Volumetric visual hull computation Display the result


32 Algorithms Standard voxel based method Exact polyhedral methods Image-based visual hulls
33 Exact Polyhedral - example
34 Exact Polyhedral Methods Wojciech Matusik et al. First, silhouette images are converted to polygons. (convex or non-convex, with holes allowed) Each edge is back projected to form a 3d polygon. Then each polygon is projected onto each image, and intersected with each silhouette in 2D. The resulting polygons are assembled to form the polyhedral visual hull Wojciech Matusik, An Efficient Visual Hull Computation Algorithm
35 Exact Polyhedral Methods Wojciech Matusik, An Efficient Visual Hull Computation Algorithm

36 Wojciech Matusik et al.

37 IBVH Results Approximately constant computation per pixel per camera Parallelizes Consistent with input silhouettes

38 IBVH Results

39 Image Based Visual Hulls Lw9aFaHobao
Shape from Silhouettes I CV book Szelisky
 Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes II
 Shape from Silhouettes II Guido Gerig CS 6320, S2013 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S. Franco, J. Matusik s presentations,
Shape from Silhouettes II Guido Gerig CS 6320, S2013 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S. Franco, J. Matusik s presentations,
Shape from Silhouettes
 Shape from Silhouettes Schedule (tentative) 2 # date topic 1 Sep.22 Introduction and geometry 2 Sep.29 Invariant features 3 Oct.6 Camera models and calibration 4 Oct.13 Multiple-view geometry 5 Oct.20
Shape from Silhouettes Schedule (tentative) 2 # date topic 1 Sep.22 Introduction and geometry 2 Sep.29 Invariant features 3 Oct.6 Camera models and calibration 4 Oct.13 Multiple-view geometry 5 Oct.20
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Efficient View-Dependent Sampling of Visual Hulls
 Efficient View-Dependent Sampling of Visual Hulls Wojciech Matusik Chris Buehler Leonard McMillan Computer Graphics Group MIT Laboratory for Computer Science Cambridge, MA 02141 Abstract In this paper
Efficient View-Dependent Sampling of Visual Hulls Wojciech Matusik Chris Buehler Leonard McMillan Computer Graphics Group MIT Laboratory for Computer Science Cambridge, MA 02141 Abstract In this paper
Visual Shapes of Silhouette Sets
 Visual Shapes of Silhouette Sets Jean-Sébastien Franco Marc Lapierre Edmond Boyer GRAVIR INRIA Rhône-Alpes 655, Avenue de l Europe, 38334 Saint Ismier, France {franco,lapierre,eboyer}@inrialpes.fr Abstract
Visual Shapes of Silhouette Sets Jean-Sébastien Franco Marc Lapierre Edmond Boyer GRAVIR INRIA Rhône-Alpes 655, Avenue de l Europe, 38334 Saint Ismier, France {franco,lapierre,eboyer}@inrialpes.fr Abstract
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
An Efficient Visual Hull Computation Algorithm
 An Efficient Visual Hull Computation Algorithm Wojciech Matusik Chris Buehler Leonard McMillan Laboratory for Computer Science Massachusetts institute of Technology (wojciech, cbuehler, mcmillan)@graphics.lcs.mit.edu
An Efficient Visual Hull Computation Algorithm Wojciech Matusik Chris Buehler Leonard McMillan Laboratory for Computer Science Massachusetts institute of Technology (wojciech, cbuehler, mcmillan)@graphics.lcs.mit.edu
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Multiview Reconstruction
 Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
MULTI-VIEWPOINT SILHOUETTE EXTRACTION WITH 3D CONTEXT-AWARE ERROR DETECTION, CORRECTION, AND SHADOW SUPPRESSION
 MULTI-VIEWPOINT SILHOUETTE EXTRACTION WITH 3D CONTEXT-AWARE ERROR DETECTION, CORRECTION, AND SHADOW SUPPRESSION S. Nobuhara, Y. Tsuda, T. Matsuyama, and I. Ohama Advanced School of Informatics, Kyoto University,
MULTI-VIEWPOINT SILHOUETTE EXTRACTION WITH 3D CONTEXT-AWARE ERROR DETECTION, CORRECTION, AND SHADOW SUPPRESSION S. Nobuhara, Y. Tsuda, T. Matsuyama, and I. Ohama Advanced School of Informatics, Kyoto University,
3D Photography: Stereo Matching
 3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping
 74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
IMAGE-BASED RENDERING
 IMAGE-BASED RENDERING 1. What is Image-Based Rendering? - The synthesis of new views of a scene from pre-recorded pictures.!"$#% "'&( )*+,-/.). #0 1 ' 2"&43+5+, 2. Why? (1) We really enjoy visual magic!
IMAGE-BASED RENDERING 1. What is Image-Based Rendering? - The synthesis of new views of a scene from pre-recorded pictures.!"$#% "'&( )*+,-/.). #0 1 ' 2"&43+5+, 2. Why? (1) We really enjoy visual magic!
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Polyhedral Visual Hulls for Real-Time Rendering
 Polyhedral Visual Hulls for Real-Time Rendering Wojciech Matusik Chris Buehler Leonard McMillan MIT Laboratory for Computer Science Abstract. We present new algorithms for creating and rendering visual
Polyhedral Visual Hulls for Real-Time Rendering Wojciech Matusik Chris Buehler Leonard McMillan MIT Laboratory for Computer Science Abstract. We present new algorithms for creating and rendering visual
Image-Based Modeling and Rendering. Image-Based Modeling and Rendering. Final projects IBMR. What we have learnt so far. What IBMR is about
 Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING
 VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING Y. Kuzu a, O. Sinram b a Yıldız Technical University, Department of Geodesy and Photogrammetry Engineering 34349 Beşiktaş Istanbul, Turkey - kuzu@yildiz.edu.tr
VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING Y. Kuzu a, O. Sinram b a Yıldız Technical University, Department of Geodesy and Photogrammetry Engineering 34349 Beşiktaş Istanbul, Turkey - kuzu@yildiz.edu.tr
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Geometry based Repetition Detection for Urban Scene
 Geometry based Repetition Detection for Urban Scene Changchang Wu University of Washington Jan Michael Frahm UNC Chapel Hill Marc Pollefeys ETH Zürich Related Work Sparse Feature Matching [Loy et al. 06,
Geometry based Repetition Detection for Urban Scene Changchang Wu University of Washington Jan Michael Frahm UNC Chapel Hill Marc Pollefeys ETH Zürich Related Work Sparse Feature Matching [Loy et al. 06,
Visual Hull Construction in the Presence of Partial Occlusion
 Visual Hull Construction in the Presence of Partial cclusion Li Guan Sudipta Sinha Jean-Sébastien Franco Marc Pollefeys Department of Computer Science The University of North Carolina at Chapel Hill Chapel
Visual Hull Construction in the Presence of Partial cclusion Li Guan Sudipta Sinha Jean-Sébastien Franco Marc Pollefeys Department of Computer Science The University of North Carolina at Chapel Hill Chapel
Calibrated Image Acquisition for Multi-view 3D Reconstruction
 Calibrated Image Acquisition for Multi-view 3D Reconstruction Sriram Kashyap M S Guide: Prof. Sharat Chandran Indian Institute of Technology, Bombay April 2009 Sriram Kashyap 3D Reconstruction 1/ 42 Motivation
Calibrated Image Acquisition for Multi-view 3D Reconstruction Sriram Kashyap M S Guide: Prof. Sharat Chandran Indian Institute of Technology, Bombay April 2009 Sriram Kashyap 3D Reconstruction 1/ 42 Motivation
Ray Tracing III. Wen-Chieh (Steve) Lin National Chiao-Tung University
 Lin National Chiao-Tung University") Ray Tracing III Wen-Chieh (Steve) Lin National Chiao-Tung University Shirley, Fundamentals of Computer Graphics, Chap 10 Doug James CG slides, I-Chen Lin s CG slides Ray-tracing Review For each pixel,
Ray Tracing III Wen-Chieh (Steve) Lin National Chiao-Tung University Shirley, Fundamentals of Computer Graphics, Chap 10 Doug James CG slides, I-Chen Lin s CG slides Ray-tracing Review For each pixel,
3D Object Reconstruction using Multiple Views
 3D Object Reconstruction using Multiple Views Donghoon Kim Department of Computer Science and Statistics University of Dublin, Trinity College A thesis submitted to the University of Dublin, Trinity College
3D Object Reconstruction using Multiple Views Donghoon Kim Department of Computer Science and Statistics University of Dublin, Trinity College A thesis submitted to the University of Dublin, Trinity College
Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book)
") Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book) Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Credits: M. Shah, UCF CAP5415, lecture 23 http://www.cs.ucf.edu/courses/cap6411/cap5415/,
Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book) Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Credits: M. Shah, UCF CAP5415, lecture 23 http://www.cs.ucf.edu/courses/cap6411/cap5415/,
Using Shape Priors to Regularize Intermediate Views in Wide-Baseline Image-Based Rendering
 Using Shape Priors to Regularize Intermediate Views in Wide-Baseline Image-Based Rendering Cédric Verleysen¹, T. Maugey², P. Frossard², C. De Vleeschouwer¹ ¹ ICTEAM institute, UCL (Belgium) ; ² LTS4 lab,
Using Shape Priors to Regularize Intermediate Views in Wide-Baseline Image-Based Rendering Cédric Verleysen¹, T. Maugey², P. Frossard², C. De Vleeschouwer¹ ¹ ICTEAM institute, UCL (Belgium) ; ² LTS4 lab,
Clipping. CSC 7443: Scientific Information Visualization
 Clipping Clipping to See Inside Obscuring critical information contained in a volume data Contour displays show only exterior visible surfaces Isosurfaces can hide other isosurfaces Other displays can
Clipping Clipping to See Inside Obscuring critical information contained in a volume data Contour displays show only exterior visible surfaces Isosurfaces can hide other isosurfaces Other displays can
Silhouettes Fusion for 3D Shapes Modeling with Ghost Object Removal
 Silhouettes Fusion for 3D Shapes Modeling with Ghost Object Removal Brice Michoud, Erwan Guillou, Héctor M. Briceño and Saïda Bouakaz LIRIS - CNRS UMR 5205 - Université Claude Bernard Lyon 1 Abstract.
Silhouettes Fusion for 3D Shapes Modeling with Ghost Object Removal Brice Michoud, Erwan Guillou, Héctor M. Briceño and Saïda Bouakaz LIRIS - CNRS UMR 5205 - Université Claude Bernard Lyon 1 Abstract.
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Visual Hull Graphs Matching and Compressing Sequences of Visual Hulls. Naveen Goela
 Visual Hull Graphs Matching and Compressing Sequences of Visual Hulls by Naveen Goela Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements
Visual Hull Graphs Matching and Compressing Sequences of Visual Hulls by Naveen Goela Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Self-learning Voxel-based Multi-camera Occlusion Maps for 3D Reconstruction
 Self-learning Voxel-based Multi-camera Occlusion Maps for 3D Reconstruction Maarten Slembrouck 1, Dimitri Van Cauwelaert 1, David Van Hamme 1, Dirk Van Haerenborgh 1, Peter Van Hese 1, Peter Veelaert 1
Self-learning Voxel-based Multi-camera Occlusion Maps for 3D Reconstruction Maarten Slembrouck 1, Dimitri Van Cauwelaert 1, David Van Hamme 1, Dirk Van Haerenborgh 1, Peter Van Hese 1, Peter Veelaert 1
Hybrid Rendering for Collaborative, Immersive Virtual Environments
 Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Volumetric stereo with silhouette and feature constraints
 Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Direct Rendering of Trimmed NURBS Surfaces
 Direct Rendering of Trimmed NURBS Surfaces Hardware Graphics Pipeline 2/ 81 Hardware Graphics Pipeline GPU Video Memory CPU Vertex Processor Raster Unit Fragment Processor Render Target Screen Extended
Direct Rendering of Trimmed NURBS Surfaces Hardware Graphics Pipeline 2/ 81 Hardware Graphics Pipeline GPU Video Memory CPU Vertex Processor Raster Unit Fragment Processor Render Target Screen Extended
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
An Investigation into the Recovery of Three-Dimensional Structure from Two-Dimensional Images. Bruce J. Lamond
 An Investigation into the Recovery of Three-Dimensional Structure from Two-Dimensional Images Bruce J. Lamond Master of Science School of Computer Science Division of Informatics University of Edinburgh
An Investigation into the Recovery of Three-Dimensional Structure from Two-Dimensional Images Bruce J. Lamond Master of Science School of Computer Science Division of Informatics University of Edinburgh
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
View Synthesis using Convex and Visual Hulls. Abstract
 View Synthesis using Convex and Visual Hulls Y. Wexler R. Chellappa Center for Automation Research University of Maryland College Park Abstract This paper discusses two efficient methods for image based
View Synthesis using Convex and Visual Hulls Y. Wexler R. Chellappa Center for Automation Research University of Maryland College Park Abstract This paper discusses two efficient methods for image based
Multi-View Matching & Mesh Generation. Qixing Huang Feb. 13 th 2017
 Multi-View Matching & Mesh Generation Qixing Huang Feb. 13 th 2017 Geometry Reconstruction Pipeline RANSAC --- facts Sampling Feature point detection [Gelfand et al. 05, Huang et al. 06] Correspondences
Multi-View Matching & Mesh Generation Qixing Huang Feb. 13 th 2017 Geometry Reconstruction Pipeline RANSAC --- facts Sampling Feature point detection [Gelfand et al. 05, Huang et al. 06] Correspondences
Image Warping and Morphing. Alexey Tikhonov : Computational Photography Alexei Efros, CMU, Fall 2007
 Image Warping and Morphing Alexey Tikhonov 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Image Warping in Biology D'Arcy Thompson http://www-groups.dcs.st-and.ac.uk/~history/miscellaneous/darcy.html
Image Warping and Morphing Alexey Tikhonov 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Image Warping in Biology D'Arcy Thompson http://www-groups.dcs.st-and.ac.uk/~history/miscellaneous/darcy.html
L1 - Introduction. Contents. Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming
 L1 - Introduction Contents Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming 1 Definitions Computer-Aided Design (CAD) The technology concerned with the
L1 - Introduction Contents Introduction of CAD/CAM system Components of CAD/CAM systems Basic concepts of graphics programming 1 Definitions Computer-Aided Design (CAD) The technology concerned with the
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Spatial Data Structures
 15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) March 28, 2002 [Angel 8.9] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) March 28, 2002 [Angel 8.9] Frank Pfenning Carnegie
Spatial Data Structures
 CSCI 480 Computer Graphics Lecture 7 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids BSP Trees [Ch. 0.] March 8, 0 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s/
CSCI 480 Computer Graphics Lecture 7 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids BSP Trees [Ch. 0.] March 8, 0 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s/
Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction. CVPR 2017 Tutorial Christian Häne UC Berkeley
 Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction CVPR 2017 Tutorial Christian Häne UC Berkeley Dense Multi-View Reconstruction Goal: 3D Model from Images (Depth
Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction CVPR 2017 Tutorial Christian Häne UC Berkeley Dense Multi-View Reconstruction Goal: 3D Model from Images (Depth
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Computer Vision / Computer Graphics Collaboration for Model-based Imaging, Rendering, image Analysis and Graphical special Effects
 Mirage 2003 Proceedings Computer Vision / Computer Graphics Collaboration for Model-based Imaging, Rendering, image Analysis and Graphical special Effects INRIA Rocquencourt, France, March, 10-11 2003
Mirage 2003 Proceedings Computer Vision / Computer Graphics Collaboration for Model-based Imaging, Rendering, image Analysis and Graphical special Effects INRIA Rocquencourt, France, March, 10-11 2003
3D Dynamic Scene Reconstruction from Multi-View Image Sequences
 3D Dynamic Scene Reconstruction from Multi-View Image Sequences PhD Confirmation Report Carlos Leung Supervisor : A/Prof Brian Lovell (University Of Queensland) Dr. Changming Sun (CSIRO Mathematical and
3D Dynamic Scene Reconstruction from Multi-View Image Sequences PhD Confirmation Report Carlos Leung Supervisor : A/Prof Brian Lovell (University Of Queensland) Dr. Changming Sun (CSIRO Mathematical and
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from Motion CSC 767
 Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Volume visualization. Volume visualization. Volume visualization methods. Sources of volume visualization. Sources of volume visualization
 Volume visualization Volume visualization Volumes are special cases of scalar data: regular 3D grids of scalars, typically interpreted as density values. Each data value is assumed to describe a cubic
Volume visualization Volume visualization Volumes are special cases of scalar data: regular 3D grids of scalars, typically interpreted as density values. Each data value is assumed to describe a cubic
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Shape-from-Silhouette with Two Mirrors and an Uncalibrated Camera
 Shape-from-Silhouette with Two Mirrors and an Uncalibrated Camera Keith Forbes 1, Fred Nicolls 1, Gerhard de Jager 1, and Anthon Voigt 2 1 Department of Electrical Engineering, University of Cape Town,
Shape-from-Silhouette with Two Mirrors and an Uncalibrated Camera Keith Forbes 1, Fred Nicolls 1, Gerhard de Jager 1, and Anthon Voigt 2 1 Department of Electrical Engineering, University of Cape Town,
Interactive Free-Viewpoint Video
 Interactive Free-Viewpoint Video Gregor Miller, Adrian Hilton and Jonathan Starck Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford GU2 7XH, UK {gregor.miller, a.hilton,
Interactive Free-Viewpoint Video Gregor Miller, Adrian Hilton and Jonathan Starck Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford GU2 7XH, UK {gregor.miller, a.hilton,
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Fundamental Matrices from Moving Objects Using Line Motion Barcodes
 Fundamental Matrices from Moving Objects Using Line Motion Barcodes Yoni Kasten (B), Gil Ben-Artzi, Shmuel Peleg, and Michael Werman School of Computer Science and Engineering, The Hebrew University of
Fundamental Matrices from Moving Objects Using Line Motion Barcodes Yoni Kasten (B), Gil Ben-Artzi, Shmuel Peleg, and Michael Werman School of Computer Science and Engineering, The Hebrew University of
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Spatial Data Structures
 15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) April 1, 2003 [Angel 9.10] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) April 1, 2003 [Angel 9.10] Frank Pfenning Carnegie
Structure from Motion
 /8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
/8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
Passive 3D Photography
 SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
Ray casting for incremental voxel colouring
 Ray casting for incremental voxel colouring O.W. Batchelor, R. Mukundan, R. Green University of Canterbury, Dept. Computer Science& Software Engineering. Email: {owb13, mukund@cosc.canterbury.ac.nz, richard.green@canterbury.ac.nz
Ray casting for incremental voxel colouring O.W. Batchelor, R. Mukundan, R. Green University of Canterbury, Dept. Computer Science& Software Engineering. Email: {owb13, mukund@cosc.canterbury.ac.nz, richard.green@canterbury.ac.nz
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Real-Time Non- Photorealistic Rendering
 Real-Time Non- Photorealistic Rendering Presented by: Qing Hu LIAO SOCS, McGill Feb 1, 2005 Index Introduction Motivation Appel s Algorithm Improving Schema Rendering Result Economy of line A great deal
Real-Time Non- Photorealistic Rendering Presented by: Qing Hu LIAO SOCS, McGill Feb 1, 2005 Index Introduction Motivation Appel s Algorithm Improving Schema Rendering Result Economy of line A great deal
Spatial Data Structures
 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) [Angel 9.10] Outline Ray tracing review what rays matter? Ray tracing speedup faster
Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) [Angel 9.10] Outline Ray tracing review what rays matter? Ray tracing speedup faster
Spatial Data Structures
 CSCI 420 Computer Graphics Lecture 17 Spatial Data Structures Jernej Barbic University of Southern California Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees [Angel Ch. 8] 1 Ray Tracing Acceleration
CSCI 420 Computer Graphics Lecture 17 Spatial Data Structures Jernej Barbic University of Southern California Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees [Angel Ch. 8] 1 Ray Tracing Acceleration
Visual Hull Construction in the Presence of Partial Occlusion
 Visual Hull Construction in the Presence of Partial cclusion Paper ID: 200 Abstract In this paper, we propose a visual hull algorithm, which guarantees a correct construction even in the presence of partial
Visual Hull Construction in the Presence of Partial cclusion Paper ID: 200 Abstract In this paper, we propose a visual hull algorithm, which guarantees a correct construction even in the presence of partial
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
Image Formation I Chapter 2 (R. Szelisky)
") Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Visual Hulls from Single Uncalibrated Snapshots Using Two Planar Mirrors
 Visual Hulls from Single Uncalibrated Snapshots Using Two Planar Mirrors Keith Forbes 1 Anthon Voigt 2 Ndimi Bodika 2 1 Digital Image Processing Group 2 Automation and Informatics Group Department of Electrical
Visual Hulls from Single Uncalibrated Snapshots Using Two Planar Mirrors Keith Forbes 1 Anthon Voigt 2 Ndimi Bodika 2 1 Digital Image Processing Group 2 Automation and Informatics Group Department of Electrical
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Scalar Algorithms: Contouring
 Scalar Algorithms: Contouring Computer Animation and Visualisation Lecture tkomura@inf.ed.ac.uk Institute for Perception, Action & Behaviour School of Informatics Contouring Scaler Data Last Lecture...
Scalar Algorithms: Contouring Computer Animation and Visualisation Lecture tkomura@inf.ed.ac.uk Institute for Perception, Action & Behaviour School of Informatics Contouring Scaler Data Last Lecture...
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Solid Modeling. Thomas Funkhouser Princeton University C0S 426, Fall Represent solid interiors of objects
 Solid Modeling Thomas Funkhouser Princeton University C0S 426, Fall 2000 Solid Modeling Represent solid interiors of objects Surface may not be described explicitly Visible Human (National Library of Medicine)
Solid Modeling Thomas Funkhouser Princeton University C0S 426, Fall 2000 Solid Modeling Represent solid interiors of objects Surface may not be described explicitly Visible Human (National Library of Medicine)
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Free Viewpoint Video Synthesis based on Visual Hull Reconstruction from Hand-Held Multiple Cameras
 Free Viewpoint Video Synthesis based on Visual Hull Reconstruction from Hand-Held Multiple Cameras Songkran Jarusirisawad and Hideo Saito Department Information and Computer Science, Keio University 3-14-1
Free Viewpoint Video Synthesis based on Visual Hull Reconstruction from Hand-Held Multiple Cameras Songkran Jarusirisawad and Hideo Saito Department Information and Computer Science, Keio University 3-14-1
C280, Computer Vision
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
Shape from the Light Field Boundary
 Appears in: Proc. CVPR'97, pp.53-59, 997. Shape from the Light Field Boundary Kiriakos N. Kutulakos kyros@cs.rochester.edu Department of Computer Sciences University of Rochester Rochester, NY 4627-226
Appears in: Proc. CVPR'97, pp.53-59, 997. Shape from the Light Field Boundary Kiriakos N. Kutulakos kyros@cs.rochester.edu Department of Computer Sciences University of Rochester Rochester, NY 4627-226
Complex 3D Shape Recovery Using a Dual-Space Approach
 Complex 3D Shape Recovery Using a Dual-Space Approach Chen Liang and Kwan-Yee K. Wong Department of Computer Science, University of Hong Kong, Hong Kong SAR, China {cliang, kykwong}@cs.hku.hk Abstract
Complex 3D Shape Recovery Using a Dual-Space Approach Chen Liang and Kwan-Yee K. Wong Department of Computer Science, University of Hong Kong, Hong Kong SAR, China {cliang, kykwong}@cs.hku.hk Abstract
Automatic Photo Popup
 Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Foundations of Image Understanding, L. S. Davis, ed., c Kluwer, Boston, 2001, pp
 Foundations of Image Understanding, L. S. Davis, ed., c Kluwer, Boston, 2001, pp. 469-489. Chapter 16 VOLUMETRIC SCENE RECONSTRUCTION FROM MULTIPLE VIEWS Charles R. Dyer, University of Wisconsin Abstract
Foundations of Image Understanding, L. S. Davis, ed., c Kluwer, Boston, 2001, pp. 469-489. Chapter 16 VOLUMETRIC SCENE RECONSTRUCTION FROM MULTIPLE VIEWS Charles R. Dyer, University of Wisconsin Abstract