Autonomous Mobile Robots, Chapter 6 Planning and Navigation Where am I going? How do I get there? Localization. Cognition. Real World Environment
|
|
|
- Ferdinand Hart
- 6 years ago
- Views:
Transcription
1 Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control
2 Competencies for Navigation I Cognition / Reasoning : is the ability to decide what actions are required to achieve a certain goal in a given situation (belief state). decisions ranging from what path to take to what information on the environment to use. Today s industrial robots can operate without any cognition (reasoning) because their environment is static and very structured. In mobile robotics, cognition and reasoning is primarily of geometric nature, such as picking safe path or determining where to go next. already been largely explored in literature for cases in which complete information about the current situation and the environment exists (e.g. sales man problem).
3 Competencies for Navigation II However, in mobile robotics the knowledge of about the environment and situation is usually only partially known and is uncertain. makes the task much more difficult requires multiple tasks running in parallel, some for planning (global), some to guarantee survival of the robot. Robot control can usually be decomposed in various behaviors or functions e.g. wall following, localization, path generation or obstacle avoidance. In this chapter we are concerned with path planning and navigation, except the low lever motion control and localization. We can generally distinguish between (global) path planning and (local) obstacle avoidance.
4 Global Path Planing Assumption: there exists a good enough map of the environment for navigation. Topological or metric or a mixture between both. First step: Representation of the environment by a road-map (graph), cells or a potential field. The resulting discrete locations or cells allow then to use standard planning algorithms. Examples: Visibility Graph Voronoi Diagram Cell Decomposition -> Connectivity Graph Potential Field

5 Path Planning: Configuration Space State or configuration q can be described with k values q i What is the configuration space of a mobile robot?
6 Path Planning Overview 1. Road Map, Graph construction Identify a set of routes within the free space 2. Cell decomposition Discriminate between free and occupied cells Where to put the nodes? Topology-based: at distinctive locations Metric-based: where features disappear or get visible Where to put the cell boundaries? Topology- and metric-based: where features disappear or get visible 3. Potential Field Imposing a mathematical function ove the space

7 Road-Map Path Planning: Visibility Graph Shortest path length Grow obstacles to avoid collisions

8 Road-Map Path Planning: Voronoi Diagram Easy executable: Maximize the sensor readings Works also for map-building: Move on the Voronoi edges
9 Road-Map Path Planning: Voronoi, Sysquake Demo
10 Road-Map Path Planning: Cell Decomposition Divide space into simple, connected regions called cells Determine which open sells are adjacent and construct a connectivity graph Find cells in which the initial and goal configuration (state) lie and search for a path in the connectivity graph to join them. From the sequence of cells found with an appropriate search algorithm compute a path within each cell. e.g. passing through the midpoints of cell boundaries or by sequence of wall following movements.

11 Road-Map Path Planning: Exact Cell Decomposition


12 Road-Map Path Planning: Approximate Cell Decomposition

13 Road-Map Path Planning: Adaptive Cell Decomposition
14 Road-Map Path Planning: Path / Graph Search Strategies Wavefront Expansion NF1 (see also later) Breadth-First Search Depth-First Search Greedy search and A*


15 Potential Field Path Planning Robot is treated as a point under the influence of an artificial potential field. Generated robot movement is similar t a ball rolling down the hill Goal generates attractive force Obstacle are repulsive forces
16 Potential Field Path Planning: Potential Field Generation Generation of potential field function U(q) attracting (goal) and repulsing (obstacle) fields summing up the fields functions must be differentiable Generate artificial force field F(q) F( q) = )( U ( q) = )( U att ( q) ) ( U rep ( q) Set robot speed (v x, v y ) proportional to the force F(q) generated by the field the force field drives the robot to the goal if robot is assumed to be a point mass &' U # $! = $ ' ' U x! $! $ % ' y!"
17 Potential Field Path Planning: Attractive Potential Field Parabolic function representing the Euclidean distance the goal to Attracting force converges linearly towards 0 (goal)
18 Potential Field Path Planning: Repulsing Potential Field Should generate a barrier around all the obstacle strong if close to the obstacle not influence if fare from the obstacle : minimum distance to the object Field is positive or zero and tends to infinity as q gets closer to the objec
19 Potential Field Path Planning: Sysquake Demo Notes: Local minima problem exists problem is getting more complex if the robot is not considered as a point mass If objects are convex there exists situations where several minimal distances exist can result in oscillations

20 Potential Field Path Planning: Extended Potential Field Method Additionally a rotation potential field and a task potential field in introduced Rotation potential field force is also a function of robots orientation to the obstacle Task potential field Filters out the obstacles that should not influence the robots movements, i.e. only the obstacles in the sector Z in front of the robot are considered Khatib and Ch
21 Potential Field Path Planning: Potential Field using a Dyn. Mode Monatana et a Forces in the polar plane no time consuming transformations Robot modeled thoroughly potential field forces directly acting on the model filters the movement -> smooth Local minima set a new goal point

22 Potential Field Path Planning: Using Harmonic Potentials Hydrodynamics analogy robot is moving similar to a fluid particle following its stream Ensures that there are no local minima Note: Complicated, only simulation shown

23 Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent task However, efficient obstacle avoidance should be optimal with respect to the overall goal the actual speed and kinematics of the robot the on boards sensors the actual and future risk of collision observed obstacle v(t), ω(t) known obstacles (map) Example: Alice Planed path

24 Obstacle Avoidance: Bug1 Following along the obstacle to avoid it Each encountered obstacle is once fully circled before it is left at the point closest to the goal


25 Obstacle Avoidance: Bug2 Following the obstacle always on the left or right side Leaving the obstacle if the direct connection between start and goal is crossed
26 Obstacle Avoidance: Vector Field Histogram (VFH) Environment represented in a grid (2 DOF) cell values equivalent to the probability that there is an obstacle Reduction in different steps to a 1 DOF histogram calculation of steering direction all openings for the robot to pass are found the one with lowest cost function G is selected Borenstein et al.
 going through this direction Borenstein et")
27 Obstacle Avoidance: Vector Field Histogram + (VFH+) Accounts also in a very simplified way for the moving trajectories (dynamics) robot moving on arcs obstacles blocking a given direction also blocks all the trajectories (arcs) going through this direction Borenstein et al.
 have to be passed Local minimum might not be avoided Reaching of the goal can not be guaranteed Dynamics of")
28 Obstacle Avoidance: Video VFH Borenstein et al. Notes: Limitation if narrow areas (e.g. doors) have to be passed Local minimum might not be avoided Reaching of the goal can not be guaranteed Dynamics of the robot not really considered

29 Obstacle Avoidance: The Bubble Band Concept Bubble = Maximum free space which can be reached without any risk of collision generated using the distance to the object and a simplified model of the robot bubbles are used to form a band of bubbles which connects the start point with the goal point Khatib and Chatila
30 Obstacle Avoidance: Basic Curvature Velocity Methods (CVM Adding physical constraints from the robot and the environment on the velocity space (v, ω) of the robot Assumption that robot is traveling on arcs (c= ω / v) Acceleration constraints: Obstacle constraints: Obstacles are transformed in velocity space Objective function to select the optimal speed Simmons et al.
31 Obstacle Avoidance: Lane Curvature Velocity Methods (CVM) Improvement of basic CVM Not only arcs are considered lanes are calculated trading off lane length and width to the closest obstacles Lane with best properties is chosen using an objective function Note: Better performance to pass narrow areas (e.g. doors) Problem with local minima persists Simmons et al.

32 Obstacle Avoidance: Dynamic Window Approach Fox and Burgard, Brock and Kha The kinematics of the robot is considered by searching a well chosen velocity space velocity space -> some sort of configuration space robot is assumed to move on arcs ensures that the robot comes to stop before hitting an obstacle objective function is chosen to select the optimal velocity
33 Obstacle Avoidance: Global Dynamic Window Approach Global approach: This is done by adding a minima-free function named NF1 (wavepropagation) to the objective function O presented above. Occupancy grid is updated from range measurements
34 Obstacle Avoidance: The Schlegel Approach Some sort of a variation of the dynamic window approch takes into account the shape of the robot Cartesian grid and motion of circular arcs NF1 planner real time performance achieved by use of precalculated table
35 Obstacle Avoidance: The EPFL-ASL approach Dynamic window approach with global path planing Global path generated in advance Path adapted if obstacles are encountered dynamic window considering also the shape of the robot real-time because only max speed is calculated Selection (Objective) Function: Max ( a! speed + b! dist + c! goal _ heading ) speed = v / v max dist = L / L max goal_heading = 1- (α - ωt) / π Matlab-Demo start Matlab cd demojan (or cd E:\demo\demoJan) demox α Intermediate goal

36 Obstacle Avoidance: The EPFL-ASL approach
37 Obstacle Avoidance: Other approaches Behavior based difficult to introduce a precise task reachability of goal not provable Fuzzy, Neuro-Fuzzy learning required difficult to generalize

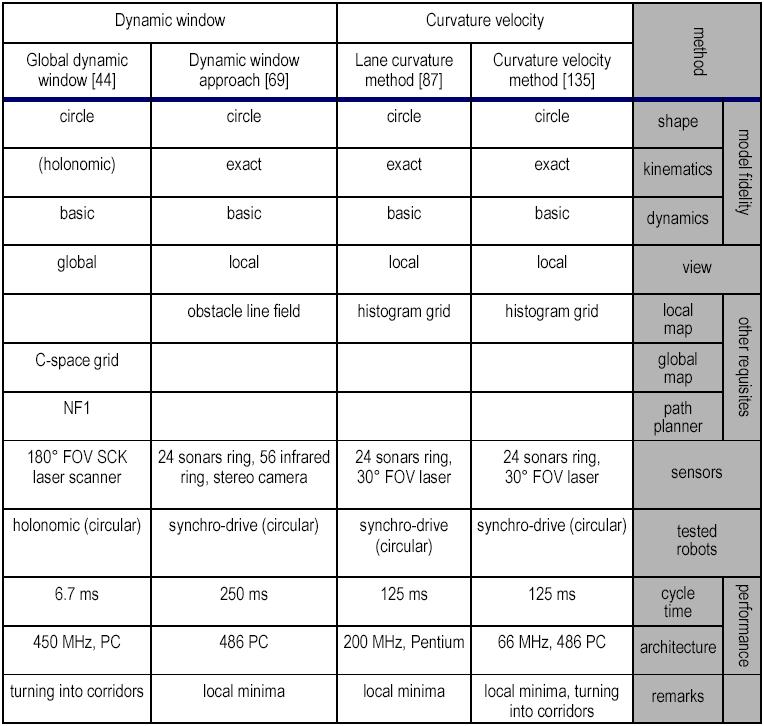
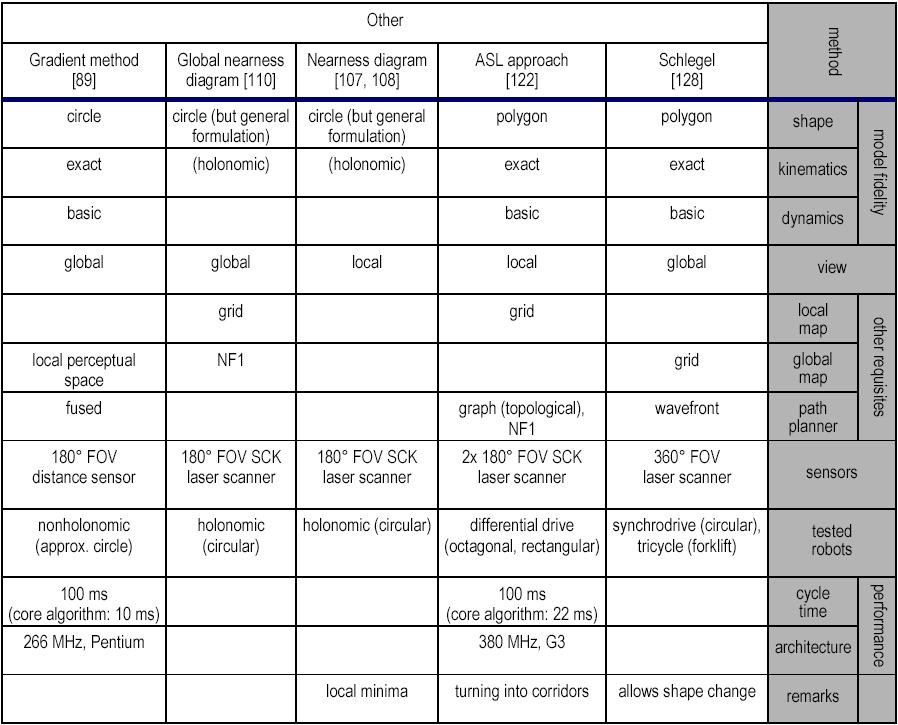
38 Obstacle Avoidance Comparison A c r o b a t D o c u m e n t
39
40
41 Generic temporal decomposition
42 4-level temporal decomposition
43 Control decomposition Pure serial decomposition Pure parallel decomposition
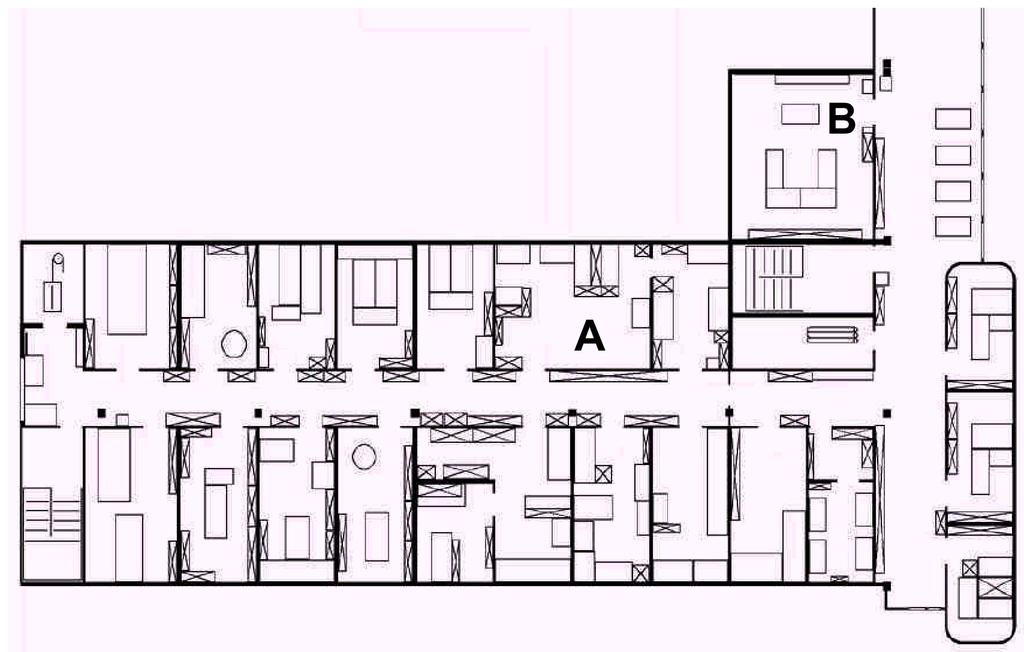
44 Sample Environment

45 Our basic architectural example Localization Position Position Local Map Local Map Cognition Environment Model Local Map Perception to Action Obstacle Avoidance Position Feedback Path Perception Real World Environment Motion Contro
46 General Tiered Architecture Executive Layer activation of behaviors failure recognition re-initiating the planner
47 A Tow-Tiered Architecture for Off-Line Planning
48 A Three-Tiered Episodic Planning Architecture. Planner is triggered when needed: e.g. blockage, failure
49 An integrated planning and execution architecture All integrated, no temporal between planner and executive layer

50 Example: The RoboX Architecture
51 Example: EXPO.02
Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
EE631 Cooperating Autonomous Mobile Robots
 EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
EE631 Cooperating Autonomous Mobile Robots Lecture 3: Path Planning Algorithm Prof. Yi Guo ECE Dept. Plan Representing the Space Path Planning Methods A* Search Algorithm D* Search Algorithm Representing
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Obstacle Avoidance (Local Path Planning)
") Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning
 Part IV: Intelligent Machines and Robotics Planning") Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Cognitive Robotics Robot Motion Planning Matteo Matteucci
 Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
6 Planning and Navigation:
 6 Planning and Navigation: Where am I going? How do I get there? 231 6 Planning and Navigation: Where am I going? How do I get there? 6.1 Introduction This text has focused on the elements of a mobile
6 Planning and Navigation: Where am I going? How do I get there? 231 6 Planning and Navigation: Where am I going? How do I get there? 6.1 Introduction This text has focused on the elements of a mobile
Autonomous Robotics 6905
 6905 Lecture 5: to Path-Planning and Navigation Dalhousie University i October 7, 2011 1 Lecture Outline based on diagrams and lecture notes adapted from: Probabilistic bili i Robotics (Thrun, et. al.)
6905 Lecture 5: to Path-Planning and Navigation Dalhousie University i October 7, 2011 1 Lecture Outline based on diagrams and lecture notes adapted from: Probabilistic bili i Robotics (Thrun, et. al.)
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
Motion Planning Howie CHoset What is Motion Planning? What is Motion Planning? Determining where to go Overview The Basics Motion Planning Statement The World and Robot Configuration Space Metrics Algorithms
Introduction to Mobile Robotics Path Planning and Collision Avoidance
 Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Motion Planning Latombe (1991): eminently necessary
Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Motion Planning Latombe (1991): eminently necessary
Introduction to Mobile Robotics Path Planning and Collision Avoidance. Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): is eminently necessary since, by
Introduction to Mobile Robotics Path Planning and Collision Avoidance Wolfram Burgard, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): is eminently necessary since, by
Sung-Eui Yoon ( 윤성의 )
") Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Visibility Graph. How does a Mobile Robot get from A to B?
 Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Path Planning Things to Consider: Spatial reasoning/understanding: robots can have many dimensions in space, obstacles can be complicated Global Planning: Do we know the environment apriori? Online
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Obstacle Avoidance (Local Path Planning)
") 6.2.2 Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
6.2.2 Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
Path Planning for Point Robots. NUS CS 5247 David Hsu
 Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Robot Motion Planning and (a little) Computational Geometry
 Computational Geometry") Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
Images taken from slides b B. Baazit, G. Dudek, J. C. Latombe and A. Moore Robot Motion Planning and (a little) Computational Geometr Topics: Transforms Topological Methods Configuration space Skeletonization
Introduction to Mobile Robotics Path and Motion Planning. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Path and Motion Planning Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): eminently necessary since,
Introduction to Mobile Robotics Path and Motion Planning Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): eminently necessary since,
Visual Navigation for Flying Robots. Motion Planning
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Roadmaps. Vertex Visibility Graph. Reduced visibility graph, i.e., not including segments that extend into obstacles on either side.
 Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
Roadmaps Vertex Visibility Graph Full visibility graph Reduced visibility graph, i.e., not including segments that extend into obstacles on either side. (but keeping endpoints roads) what else might we
CS Path Planning
 Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning
 6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Planning: Part 1 Classical Planning
 Planning: Part 1 Classical Planning Computer Science 6912 Department of Computer Science Memorial University of Newfoundland July 12, 2016 COMP 6912 (MUN) Planning July 12, 2016 1 / 9 Planning Localization
Planning: Part 1 Classical Planning Computer Science 6912 Department of Computer Science Memorial University of Newfoundland July 12, 2016 COMP 6912 (MUN) Planning July 12, 2016 1 / 9 Planning Localization
Navigation and Metric Path Planning
 Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Motion Planning 1 Retraction and Cell Decomposition
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Motion Planning 1 Retraction and Cell Decomposition motivation robots are expected to perform tasks in workspaces populated by obstacles autonomy requires
Unit 5: Part 1 Planning
 Unit 5: Part 1 Planning Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland March 25, 2014 COMP 4766/6778 (MUN) Planning March 25, 2014 1 / 9 Planning Localization
Unit 5: Part 1 Planning Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland March 25, 2014 COMP 4766/6778 (MUN) Planning March 25, 2014 1 / 9 Planning Localization
Motion Planning 2D. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Motion Planning 2D Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dai corsi: CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm Prof. J.C. Latombe Stanford
Navigation methods and systems
 Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Path Planning. Ioannis Rekleitis
 Path Planning Ioannis Rekleitis Outline Path Planning Visibility Graph Potential Fields Bug Algorithms Skeletons/Voronoi Graphs C-Space CSCE-574 Robotics 2 Mo+on Planning The ability to go from A to B
Path Planning Ioannis Rekleitis Outline Path Planning Visibility Graph Potential Fields Bug Algorithms Skeletons/Voronoi Graphs C-Space CSCE-574 Robotics 2 Mo+on Planning The ability to go from A to B
6.141: Robotics systems and science Lecture 10: Motion Planning III
 6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING
 MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
Advanced path planning. ROS RoboCup Rescue Summer School 2012
 Advanced path planning ROS RoboCup Rescue Summer School 2012 Simon Lacroix Toulouse, France Where do I come from? Robotics at LAAS/CNRS, Toulouse, France Research topics Perception, planning and decision-making,
Advanced path planning ROS RoboCup Rescue Summer School 2012 Simon Lacroix Toulouse, France Where do I come from? Robotics at LAAS/CNRS, Toulouse, France Research topics Perception, planning and decision-making,
Motion Planning, Part IV Graph Search Part II. Howie Choset
 Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
Motion Planning, Part IV Graph Search Part II Howie Choset Map-Based Approaches: Properties of a roadmap: Roadmap Theory Accessibility: there exists a collision-free path from the start to the road map
Non-holonomic Planning
 Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Elastic Bands: Connecting Path Planning and Control
 Elastic Bands: Connecting Path Planning and Control Sean Quinlan and Oussama Khatib Robotics Laboratory Computer Science Department Stanford University Abstract Elastic bands are proposed as the basis
Elastic Bands: Connecting Path Planning and Control Sean Quinlan and Oussama Khatib Robotics Laboratory Computer Science Department Stanford University Abstract Elastic bands are proposed as the basis
COMPARISON OF ROBOT NAVIGATION METHODS USING PERFORMANCE METRICS
 COMPARISON OF ROBOT NAVIGATION METHODS USING PERFORMANCE METRICS Adriano Flores Dantas, Rodrigo Porfírio da Silva Sacchi, Valguima V. V. A. Odakura Faculdade de Ciências Exatas e Tecnologia (FACET) Universidade
COMPARISON OF ROBOT NAVIGATION METHODS USING PERFORMANCE METRICS Adriano Flores Dantas, Rodrigo Porfírio da Silva Sacchi, Valguima V. V. A. Odakura Faculdade de Ciências Exatas e Tecnologia (FACET) Universidade
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Robot motion planning using exact cell decomposition and potential field methods
 Robot motion planning using exact cell decomposition and potential field methods DUŠAN GLAVAŠKI, MARIO VOLF, MIRJANA BONKOVIĆ Laboratory for Robotics and Intelligent Systems Faculty of Electrical Engineering,
Robot motion planning using exact cell decomposition and potential field methods DUŠAN GLAVAŠKI, MARIO VOLF, MIRJANA BONKOVIĆ Laboratory for Robotics and Intelligent Systems Faculty of Electrical Engineering,
Robot Motion Planning Using Generalised Voronoi Diagrams
 Robot Motion Planning Using Generalised Voronoi Diagrams MILOŠ ŠEDA, VÁCLAV PICH Institute of Automation and Computer Science Brno University of Technology Technická 2, 616 69 Brno CZECH REPUBLIC Abstract:
Robot Motion Planning Using Generalised Voronoi Diagrams MILOŠ ŠEDA, VÁCLAV PICH Institute of Automation and Computer Science Brno University of Technology Technická 2, 616 69 Brno CZECH REPUBLIC Abstract:
RoboCup Rescue Summer School Navigation Tutorial
 RoboCup Rescue Summer School 2012 Institute for Software Technology, Graz University of Technology, Austria 1 Literature Choset, Lynch, Hutchinson, Kantor, Burgard, Kavraki and Thrun. Principle of Robot
RoboCup Rescue Summer School 2012 Institute for Software Technology, Graz University of Technology, Austria 1 Literature Choset, Lynch, Hutchinson, Kantor, Burgard, Kavraki and Thrun. Principle of Robot
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Mobile Robots: An Introduction.
 Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
Mobile Robots: An Introduction Amirkabir University of Technology Computer Engineering & Information Technology Department http://ce.aut.ac.ir/~shiry/lecture/robotics-2004/robotics04.html Introduction
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
CS 378: Computer Game Technology
 CS 378: Computer Game Technology Dynamic Path Planning, Flocking Spring 2012 University of Texas at Austin CS 378 Game Technology Don Fussell Dynamic Path Planning! What happens when the environment changes
CS 378: Computer Game Technology Dynamic Path Planning, Flocking Spring 2012 University of Texas at Austin CS 378 Game Technology Don Fussell Dynamic Path Planning! What happens when the environment changes
6. NEURAL NETWORK BASED PATH PLANNING ALGORITHM 6.1 INTRODUCTION
 6 NEURAL NETWORK BASED PATH PLANNING ALGORITHM 61 INTRODUCTION In previous chapters path planning algorithms such as trigonometry based path planning algorithm and direction based path planning algorithm
6 NEURAL NETWORK BASED PATH PLANNING ALGORITHM 61 INTRODUCTION In previous chapters path planning algorithms such as trigonometry based path planning algorithm and direction based path planning algorithm
Trajectory Modification Using Elastic Force for Collision Avoidance of a Mobile Manipulator
 Trajectory Modification Using Elastic Force for Collision Avoidance of a Mobile Manipulator Nak Yong Ko 1, Reid G. Simmons 2, and Dong Jin Seo 1 1 Dept. Control and Instrumentation Eng., Chosun Univ.,
Trajectory Modification Using Elastic Force for Collision Avoidance of a Mobile Manipulator Nak Yong Ko 1, Reid G. Simmons 2, and Dong Jin Seo 1 1 Dept. Control and Instrumentation Eng., Chosun Univ.,
Metric Planning: Overview
 Also called quantitative planning Tries to find optimal path to goal Metric Planning: Overview As opposed to some path as per qualitative approach Usually plans path as series of subgoals (waypoints) Optimal/best
Also called quantitative planning Tries to find optimal path to goal Metric Planning: Overview As opposed to some path as per qualitative approach Usually plans path as series of subgoals (waypoints) Optimal/best
Motion Control (wheeled robots)
") Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
Motion Planning, Part III Graph Search, Part I. Howie Choset
 Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Robotic Motion Planning: Review C-Space and Start Potential Functions
 Robotic Motion Planning: Review C-Space and Start Potential Functions Robotics Institute 16-735 http://www.cs.cmu.edu/~motionplanning Howie Choset http://www.cs.cmu.edu/~choset What if the robot is not
Robotic Motion Planning: Review C-Space and Start Potential Functions Robotics Institute 16-735 http://www.cs.cmu.edu/~motionplanning Howie Choset http://www.cs.cmu.edu/~choset What if the robot is not
Real-Time Obstacle Avoidance For Polygonal Robots With A Reduced Dynamic Window
 Real-Time Obstacle Avoidance For Polygonal Robots With A Reduced Dynamic Window Kai O. Arras a, Jan Persson b, Nicola Tomatis a, Roland Siegwart a a Autonomous Systems Lab Swiss Federal Institute of Technology
Real-Time Obstacle Avoidance For Polygonal Robots With A Reduced Dynamic Window Kai O. Arras a, Jan Persson b, Nicola Tomatis a, Roland Siegwart a a Autonomous Systems Lab Swiss Federal Institute of Technology
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Fast Local Planner for Autonomous Helicopter
 Fast Local Planner for Autonomous Helicopter Alexander Washburn talexan@seas.upenn.edu Faculty advisor: Maxim Likhachev April 22, 2008 Abstract: One challenge of autonomous flight is creating a system
Fast Local Planner for Autonomous Helicopter Alexander Washburn talexan@seas.upenn.edu Faculty advisor: Maxim Likhachev April 22, 2008 Abstract: One challenge of autonomous flight is creating a system
Road Map Methods. Including material from Howie Choset / G.D. Hager S. Leonard
 Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
Road Map Methods Including material from Howie Choset The Basic Idea Capture the connectivity of Q free by a graph or network of paths. 16-735, Howie Choset, with significant copying from who loosely based
CMPUT 412 Motion Control Wheeled robots. Csaba Szepesvári University of Alberta
 CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
CS4733 Class Notes. 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles
 CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
CS4733 Class Notes 1 2-D Robot Motion Planning Algorithm Using Grown Obstacles Reference: An Algorithm for Planning Collision Free Paths Among Poyhedral Obstacles by T. Lozano-Perez and M. Wesley. This
Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3
 Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3 Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 28, 2014 COMP 4766/6778 (MUN) Kinematics of
Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3 Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 28, 2014 COMP 4766/6778 (MUN) Kinematics of
Introduction to Autonomous Mobile Robots
 Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
COMPLETE AND SCALABLE MULTI-ROBOT PLANNING IN TUNNEL ENVIRONMENTS. Mike Peasgood John McPhee Christopher Clark
 COMPLETE AND SCALABLE MULTI-ROBOT PLANNING IN TUNNEL ENVIRONMENTS Mike Peasgood John McPhee Christopher Clark Lab for Intelligent and Autonomous Robotics, Department of Mechanical Engineering, University
COMPLETE AND SCALABLE MULTI-ROBOT PLANNING IN TUNNEL ENVIRONMENTS Mike Peasgood John McPhee Christopher Clark Lab for Intelligent and Autonomous Robotics, Department of Mechanical Engineering, University
Announcements. CS 188: Artificial Intelligence Fall Robot motion planning! Today. Robotics Tasks. Mobile Robots
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall Announcements
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
Copyright by Shilpa Gulati 2011
 Copyright by Shilpa Gulati 2011 The Dissertation Committee for Shilpa Gulati certifies that this is the approved version of the following dissertation: A Framework for Characterization and Planning of
Copyright by Shilpa Gulati 2011 The Dissertation Committee for Shilpa Gulati certifies that this is the approved version of the following dissertation: A Framework for Characterization and Planning of
Neural Networks for Obstacle Avoidance
 Neural Networks for Obstacle Avoidance Joseph Djugash Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 josephad@andrew.cmu.edu Bradley Hamner Robotics Institute Carnegie Mellon University
Neural Networks for Obstacle Avoidance Joseph Djugash Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 josephad@andrew.cmu.edu Bradley Hamner Robotics Institute Carnegie Mellon University
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
ELLIPTIC NET - A PATH PLANNING ALGORITHM FOR DYNAMIC ENVIRONMENTS
 ELLIPTIC NET - A PATH PLANNING ALGORITHM FOR DYNAMIC ENVIRONMENTS Martin Saska CTU in Prague, The Gerstner Laboratory for Intelligent Decision Making Technicka, 667 Prague 6, Czech Republic Informatics
ELLIPTIC NET - A PATH PLANNING ALGORITHM FOR DYNAMIC ENVIRONMENTS Martin Saska CTU in Prague, The Gerstner Laboratory for Intelligent Decision Making Technicka, 667 Prague 6, Czech Republic Informatics
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS
 Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Lesson 1 Introduction to Path Planning Graph Searches: BFS and DFS DASL Summer Program Path Planning References: http://robotics.mem.drexel.edu/mhsieh/courses/mem380i/index.html http://dasl.mem.drexel.edu/hing/bfsdfstutorial.htm
Path Planning. Jacky Baltes Dept. of Computer Science University of Manitoba 11/21/10
 Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Local Search Methods. CS 188: Artificial Intelligence Fall Announcements. Hill Climbing. Hill Climbing Diagram. Today
 CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization
 Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Motion Planning of Multiple Mobile Robots for Cooperative Manipulation and Transportation
 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 19, NO. 2, APRIL 2003 223 Motion Planning of Multiple Mobile Robots for Cooperative Manipulation and Transportation Atsushi Yamashita, Member, IEEE, Tamio
IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 19, NO. 2, APRIL 2003 223 Motion Planning of Multiple Mobile Robots for Cooperative Manipulation and Transportation Atsushi Yamashita, Member, IEEE, Tamio
Humanoid Robotics. Path Planning and Walking. Maren Bennewitz
 Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
Introduction to State-of-the-art Motion Planning Algorithms. Presented by Konstantinos Tsianos
 Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Safe Prediction-Based Local Path Planning using Obstacle Probability Sections
 Slide 1 Safe Prediction-Based Local Path Planning using Obstacle Probability Sections Tanja Hebecker and Frank Ortmeier Chair of Software Engineering, Otto-von-Guericke University of Magdeburg, Germany
Slide 1 Safe Prediction-Based Local Path Planning using Obstacle Probability Sections Tanja Hebecker and Frank Ortmeier Chair of Software Engineering, Otto-von-Guericke University of Magdeburg, Germany
A Genetic Algorithm for Robust Motion Planning
 A Genetic Algorithm for Robust Motion Planning Domingo Gallardo, Otto Colomina, Francisco Flórez, Ramón Rizo domingo,otto,florez,rizo@dtic.ua.es Grupo i3a: Informatica Industrial e Inteligencia Artificial
A Genetic Algorithm for Robust Motion Planning Domingo Gallardo, Otto Colomina, Francisco Flórez, Ramón Rizo domingo,otto,florez,rizo@dtic.ua.es Grupo i3a: Informatica Industrial e Inteligencia Artificial
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222)
") 2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
MOBILE ROBOTICS course MOTION PLANNING. Maria Isabel Ribeiro Pedro Lima
 MOBILE ROBOTICS course MOTION PLANNING Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco Pais, 1 1049-001
MOBILE ROBOTICS course MOTION PLANNING Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco Pais, 1 1049-001
Manipula0on Algorithms Mo0on Planning. Mo#on Planning I. Katharina Muelling (NREC, Carnegie Mellon University) 1
 1") 16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
16-843 Manipula0on Algorithms Mo0on Planning Mo#on Planning I Katharina Muelling (NREC, Carnegie Mellon University) 1 Configura0on Space Obstacles Star Algorithm Convex robot, transla#on C obs : convex
Three-Dimensional Off-Line Path Planning for Unmanned Aerial Vehicle Using Modified Particle Swarm Optimization
 Three-Dimensional Off-Line Path Planning for Unmanned Aerial Vehicle Using Modified Particle Swarm Optimization Lana Dalawr Jalal Abstract This paper addresses the problem of offline path planning for
Three-Dimensional Off-Line Path Planning for Unmanned Aerial Vehicle Using Modified Particle Swarm Optimization Lana Dalawr Jalal Abstract This paper addresses the problem of offline path planning for
Safe prediction-based local path planning using obstacle probability sections
 Safe prediction-based local path planning using obstacle probability sections Tanja Hebecker 1 and Frank Ortmeier Abstract Autonomous mobile robots gain more and more importance. In the nearest future
Safe prediction-based local path planning using obstacle probability sections Tanja Hebecker 1 and Frank Ortmeier Abstract Autonomous mobile robots gain more and more importance. In the nearest future
Collision avoidance with Vector Field Histogram+ and Nearness Diagram algorithms implemented on a LEGO Mindstorms NXT robot
 Collision avoidance with Vector Field Histogram+ and Nearness Diagram algorithms implemented on a LEGO Mindstorms NXT robot Per Eriksson Felix Foborg Sofia Lindmark February 9, 2014 Abstract In this project
Collision avoidance with Vector Field Histogram+ and Nearness Diagram algorithms implemented on a LEGO Mindstorms NXT robot Per Eriksson Felix Foborg Sofia Lindmark February 9, 2014 Abstract In this project
Computer Game Programming Basic Path Finding
 15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles
 A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles Jing Wang, Zhihua Qu,, Yi Guo and Jian Yang Electrical and Computer Engineering University
A Reduced-Order Analytical Solution to Mobile Robot Trajectory Generation in the Presence of Moving Obstacles Jing Wang, Zhihua Qu,, Yi Guo and Jian Yang Electrical and Computer Engineering University
Ian Mitchell. Department of Computer Science The University of British Columbia
 CPSC 542D: Level Set Methods Dynamic Implicit Surfaces and the Hamilton-Jacobi Equation or What Water Simulation, Robot Path Planning and Aircraft Collision Avoidance Have in Common Ian Mitchell Department
CPSC 542D: Level Set Methods Dynamic Implicit Surfaces and the Hamilton-Jacobi Equation or What Water Simulation, Robot Path Planning and Aircraft Collision Avoidance Have in Common Ian Mitchell Department
Centre for Autonomous Systems
 Robot Henrik I Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se 27th April 2005 Outline 1 duction 2 Kinematic and Constraints 3 Mobile Robot 4 Mobile Robot 5 Beyond Basic 6 Kinematic 7
Robot Henrik I Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se 27th April 2005 Outline 1 duction 2 Kinematic and Constraints 3 Mobile Robot 4 Mobile Robot 5 Beyond Basic 6 Kinematic 7