CAP 5415 Computer Vision. Fall 2011
|
|
|
- Jeremy Wood
- 6 years ago
- Views:
Transcription
1 CAP 5415 Computer Vision Fall 2011
2 General Instructor: Dr. Mubarak Shah Office: 247-F HEC
3 Course Class Time Tuesdays, Thursdays 12 Noon to 1:15PM 383 ENGR Office hours Tuesdays 1:15 PM to 2:00 PM Thursdays 11 AM to 12 Noon And by appointment Grading Midterm 20% Final 30% Assignments 10% Programs 40% Grading Policy: = A; = B; = C;
4 Course Reference Texts: Mubarak Shah, "Fundamentals of Computer Vision". Richard Szeliski, "Computer Vision: Algorithms and Application, Springer. Emanuele Trucco, Alessandro Verri, "Introductory Techniques for 3-D Computer Vision", Prentice Hall, Course Slides from Previous Years
5 Topics We ll Cover Image Filtering, Edge Detection, Interest Point Detectors Motion and Optical Flow Region Segmentation Object Detection and tracking Line and Curve Detection Shape Analysis Stereopsis Imaging Geometry, Camera Modeling and Calibration We may change order
6 Computer Vision The ability of computers to see. Image Understanding Machine Vision Robot Vision Image Analysis Video Understanding

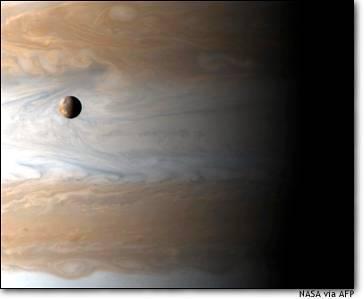
7 A picture is worth a thousand words.

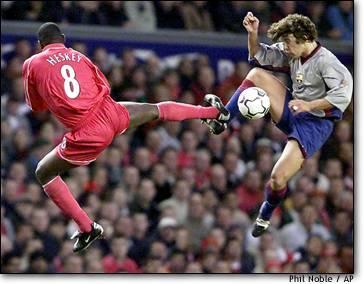
8 A word is worth a thousand pictures. A HUNT
9 Image 2-D array of numbers (intensity values, gray levels) Gray levels 0 (black) to 255 (white) Color image is 3 2-D arrays of numbers Red Green Blue Resolution (number of rows and columns) 128X X X X480


10
11 Image Formats TIF PGM PBM GIF JPEG
12 Video Sequence of frames 30 frames per second Formats AVI MPEG Quick Time
13 Video Clip















14 Sequence of Images
15 Image Formation Light Source Camera (extrinsic and intrinsic parameters) Scene (Surface reflectance, Surface shape )
 World point image y")
16 Perspective Projection (Pin Hole) Image Plane f Lens (X,Y,Z) World point image y Z
 World point image")
17 Orthographic Projection Image Plane (X,Y,Z) World point image y
18 Shape from X Recover 3-D shape from 2-D image(s) Stereo Motion Shading Texture Contours
19 Stereo

20

21 Renault Stereo Pair
22 Depth Map

23 Stereo Pair

24 Shape from Shading
25 Lambertian Model S=L, light source I=S.N
")
26 Vase (1, 0, 1) (-1, 1, 1) (-1,-1, 1)

27 Shape from Texture
28 Visual Motion

29 Hamburg Taxi seq (Optical Flow)


30 Optical Flow Field Examples


31 Sequence Raw Optical flow 31

32 Video Clip & Mosaic

33 Structure From Motion Reconstructed Shape

34
35 Applications of Computer Vision Face Recognition Object Recognition Video Surveillance and Monitoring Object detection, tracking and behavior analysis Remote Sensing: UAVs Robotics Computer Graphics

36 Face Recognition
37 Object Recognition Finding People in images Problem 1: Given an image I Question: Does I contain an image of a person?
38 Yes Instances




39 No Instances



40 Localize People (Human Detection)


41 Human Detection









42 Airplanes






43 Motor Cycles

44 FACIAL EXPRESSIONS RAISE EYE BROWS SMILE


45 Detecting Driver Alertness

46 Lipreading






47 Video Surveillance and Monitoring Object detection Object tracking Object categorization and classification Event or Activities Recognition Automated Surveillance System (Detection & Tracking)


48 COCOA COCOA System Flow Aerial Video Telemetry* Ego Motion Compensation Feature based + Gradient Based Motion Detection Accumulative Frame Differencing + Background Modeling + Object Segmentation Object Tracking Kernel Tracking + Blob Tracking + Occlusion Handling Registered Images Motion Detection Tracks Event Detection & Indexing

49 Ego Motion Compensation Results - I Aerial Video - EO Mosaic Alignment Mask


50 Ego Motion Compensation Results - II Aerial Video - IR Mosaic Alignment Mask

51 Detection Result


52 Tracking Results

53 Tracking Results











54 UCF YouTube Action Dataset Cycling Diving Golf Swinging Riding Juggling Basketball Shooting Swinging Tennis Swinging Volleyball Spiking Trampoline Jumping Walking Dog

55 Making A Sandwich

56 Human Behavior Recognition



57 Key Frames Sequence 1 (350 frames), Part 1

58 Robot Vision (Unmanned Ground Vehicle) UGV
59 Geo-registration

60 Geo-registration

61 Layer Based Video Composition

62 Results of Doll

63 Results of Mom-Daughter
Computer Vision EE837, CS867, CE803
 Computer Vision EE837, CS867, CE803 Introduction Lecture 01 Computer Vision Prerequisites Basic linear Algebra, probability, calculus - Required Basic data structures/programming knowledge - Required Working
Computer Vision EE837, CS867, CE803 Introduction Lecture 01 Computer Vision Prerequisites Basic linear Algebra, probability, calculus - Required Basic data structures/programming knowledge - Required Working
Global Flow Estimation. Lecture 9
 Global Flow Estimation Lecture 9 Global Motion Estimate motion using all pixels in the image. Parametric flow gives an equation, which describes optical flow for each pixel. Affine Projective Global motion
Global Flow Estimation Lecture 9 Global Motion Estimate motion using all pixels in the image. Parametric flow gives an equation, which describes optical flow for each pixel. Affine Projective Global motion
Global Flow Estimation. Lecture 9
 Motion Models Image Transformations to relate two images 3D Rigid motion Perspective & Orthographic Transformation Planar Scene Assumption Transformations Translation Rotation Rigid Affine Homography Pseudo
Motion Models Image Transformations to relate two images 3D Rigid motion Perspective & Orthographic Transformation Planar Scene Assumption Transformations Translation Rotation Rigid Affine Homography Pseudo
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Course Name: Computer Vision Course Code: IT444
 Course Name: Computer Vision Course Code: IT444 I. Basic Course Information Major or minor element of program: Major Department offering the course:information Technology Department Academic level:400
Course Name: Computer Vision Course Code: IT444 I. Basic Course Information Major or minor element of program: Major Department offering the course:information Technology Department Academic level:400
Computer Vision. Introduction
 Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Why study Computer Vision?
 Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
CSc I6716 Spring D Computer Vision. Introduction. Instructor: Zhigang Zhu City College of New York
 Introduction CSc I6716 Spring 2012 Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation p Books, notes, etc. Web page
Introduction CSc I6716 Spring 2012 Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation p Books, notes, etc. Web page
Structure from Motion. Lecture-15
 Structure from Motion Lecture-15 Shape From X Recovery of 3D (shape) from one or two (2D images). Shape From X Stereo Motion Shading Photometric Stereo Texture Contours Silhouettes Defocus Applications
Structure from Motion Lecture-15 Shape From X Recovery of 3D (shape) from one or two (2D images). Shape From X Stereo Motion Shading Photometric Stereo Texture Contours Silhouettes Defocus Applications
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction
 Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Lecture 24: More on Reflectance CAP 5415
 Lecture 24: More on Reflectance CAP 5415 Recovering Shape We ve talked about photometric stereo, where we assumed that a surface was diffuse Could calculate surface normals and albedo What if the surface
Lecture 24: More on Reflectance CAP 5415 Recovering Shape We ve talked about photometric stereo, where we assumed that a surface was diffuse Could calculate surface normals and albedo What if the surface
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
3D Computer Vision. Introduction. Introduction. CSc I6716 Fall Instructor: Zhigang Zhu City College of New York
 Introduction CSc I6716 Fall 2010 3D Computer Vision Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation Books, notes,
Introduction CSc I6716 Fall 2010 3D Computer Vision Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation Books, notes,
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Image formation - About the course. Grading & Project. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 305) Hours Lecture: Tuesda 5:30-8:00pm, TTLMAN 403B Office hour: Tuesda 3:00-5:00pm, or b appointment Tetbook Computer Vision: Models,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 305) Hours Lecture: Tuesda 5:30-8:00pm, TTLMAN 403B Office hour: Tuesda 3:00-5:00pm, or b appointment Tetbook Computer Vision: Models,
Large-Scale 3D Point Cloud Processing Tutorial 2013
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Features The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in Prof.
Large-Scale 3D Point Cloud Processing Tutorial 2013 Features The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in Prof.
CS595:Introduction to Computer Vision
 CS595:Introduction to Computer Vision Instructor: Qi Li Instructor Course syllabus E-mail: qi.li@cs.wku.edu Office: TCCW 135 Office hours MW: 9:00-10:00, 15:00-16:00 T: 9:00-12:00, 14:00-16:00 F: 9:00-10:00
CS595:Introduction to Computer Vision Instructor: Qi Li Instructor Course syllabus E-mail: qi.li@cs.wku.edu Office: TCCW 135 Office hours MW: 9:00-10:00, 15:00-16:00 T: 9:00-12:00, 14:00-16:00 F: 9:00-10:00
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Introduction to Computer Vision
 Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Image Based Rendering. D.A. Forsyth, with slides from John Hart
 Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Topics and things to know about them:
 Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Video Mosaics for Virtual Environments, R. Szeliski. Review by: Christopher Rasmussen
 Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
COMPUTER VISION. Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai
 COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Think-Pair-Share. What visual or physiological cues help us to perceive 3D shape and depth?
 Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Passive 3D Photography
 SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Thanks to Chris Bregler. COS 429: Computer Vision
 Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Szymon Rusinkiewicz TA: Linjie Luo smr@cs.princeton.edu linjiel@cs.princeton.edu Course web page http://www.cs.princeton.edu/courses/archive/fall09/cos429/
Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Szymon Rusinkiewicz TA: Linjie Luo smr@cs.princeton.edu linjiel@cs.princeton.edu Course web page http://www.cs.princeton.edu/courses/archive/fall09/cos429/
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots
 3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
Passive 3D Photography
 SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
Vision is inferential. (
 Announcements Final: Thursday, December 15, 8am, here. Review Session, Wednesday, Dec 14, 1pm, AV Williams 4424. Review sheet with practice problems on-line. Hints for Final Focus on core techniques/ideas:
Announcements Final: Thursday, December 15, 8am, here. Review Session, Wednesday, Dec 14, 1pm, AV Williams 4424. Review sheet with practice problems on-line. Hints for Final Focus on core techniques/ideas:
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Announcements. Introduction. Why is this hard? What is Computer Vision? We all make mistakes. What do you see? Class Web Page is up:
 Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
Assignment 2: Stereo and 3D Reconstruction from Disparity
 CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Announcements. Stereo Vision Wrapup & Intro Recognition
 Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
Perception, Part 2 Gleitman et al. (2011), Chapter 5
, Chapter 5") Perception, Part 2 Gleitman et al. (2011), Chapter 5 Mike D Zmura Department of Cognitive Sciences, UCI Psych 9A / Psy Beh 11A February 27, 2014 T. M. D'Zmura 1 Visual Reconstruction of a Three-Dimensional
Perception, Part 2 Gleitman et al. (2011), Chapter 5 Mike D Zmura Department of Cognitive Sciences, UCI Psych 9A / Psy Beh 11A February 27, 2014 T. M. D'Zmura 1 Visual Reconstruction of a Three-Dimensional
Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]
![Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]](/thumbs/80/81283374.jpg "Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]") Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Making Machines See. Roberto Cipolla Department of Engineering. Research team
 Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Topics to be Covered in the Rest of the Semester. CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester
 Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
(Sample) Final Exam with brief answers
 Final Exam with brief answers") Name: Perm #: (Sample) Final Exam with brief answers CS/ECE 181B Intro to Computer Vision March 24, 2017 noon 3:00 pm This is a closed-book test. There are also a few pages of equations, etc. included
Name: Perm #: (Sample) Final Exam with brief answers CS/ECE 181B Intro to Computer Vision March 24, 2017 noon 3:00 pm This is a closed-book test. There are also a few pages of equations, etc. included
Light source estimation using feature points from specular highlights and cast shadows
 Vol. 11(13), pp. 168-177, 16 July, 2016 DOI: 10.5897/IJPS2015.4274 Article Number: F492B6D59616 ISSN 1992-1950 Copyright 2016 Author(s) retain the copyright of this article http://www.academicjournals.org/ijps
Vol. 11(13), pp. 168-177, 16 July, 2016 DOI: 10.5897/IJPS2015.4274 Article Number: F492B6D59616 ISSN 1992-1950 Copyright 2016 Author(s) retain the copyright of this article http://www.academicjournals.org/ijps
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Computer Vision. Alexandra Branzan Albu Spring 2009
 Computer Vision Alexandra Branzan Albu Spring 2009 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 315): by appointment CENG 421/ ELEC 536 : Computer
Computer Vision Alexandra Branzan Albu Spring 2009 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 315): by appointment CENG 421/ ELEC 536 : Computer
DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION
 2012 IEEE International Conference on Multimedia and Expo Workshops DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION Yasir Salih and Aamir S. Malik, Senior Member IEEE Centre for Intelligent
2012 IEEE International Conference on Multimedia and Expo Workshops DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION Yasir Salih and Aamir S. Malik, Senior Member IEEE Centre for Intelligent
EECS 442 Computer Vision fall 2011
 EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Prof. Feng Liu. Spring /27/2014
 Prof. Feng Liu Spring 2014 http://www.cs.pdx.edu/~fliu/courses/cs510/ 05/27/2014 Last Time Video Stabilization 2 Today Stereoscopic 3D Human depth perception 3D displays 3 Stereoscopic media Digital Visual
Prof. Feng Liu Spring 2014 http://www.cs.pdx.edu/~fliu/courses/cs510/ 05/27/2014 Last Time Video Stabilization 2 Today Stereoscopic 3D Human depth perception 3D displays 3 Stereoscopic media Digital Visual
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010
 An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
Projector Calibration for Pattern Projection Systems
 Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
Announcements. Hough Transform [ Patented 1962 ] Generalized Hough Transform, line fitting. Assignment 2: Due today Midterm: Thursday, May 5 in class
![Announcements. Hough Transform [ Patented 1962 ] Generalized Hough Transform, line fitting. Assignment 2: Due today Midterm: Thursday, May 5 in class](/thumbs/85/92905127.jpg "Announcements. Hough Transform [ Patented 1962 ] Generalized Hough Transform, line fitting. Assignment 2: Due today Midterm: Thursday, May 5 in class") Announcements Generalized Hough Transform, line fitting Assignment 2: Due today Midterm: Thursday, May 5 in class Introduction to Computer Vision CSE 152 Lecture 11a What is region like if: 1. λ 1 = 0?
Announcements Generalized Hough Transform, line fitting Assignment 2: Due today Midterm: Thursday, May 5 in class Introduction to Computer Vision CSE 152 Lecture 11a What is region like if: 1. λ 1 = 0?
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
All good things must...
 Lecture 17 Final Review All good things must... UW CSE vision faculty Course Grading Programming Projects (80%) Image scissors (20%) -DONE! Panoramas (20%) - DONE! Content-based image retrieval (20%) -
Lecture 17 Final Review All good things must... UW CSE vision faculty Course Grading Programming Projects (80%) Image scissors (20%) -DONE! Panoramas (20%) - DONE! Content-based image retrieval (20%) -
CV: 3D to 2D mathematics. Perspective transformation; camera calibration; stereo computation; and more
 CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
Computer Vision. Geometric Camera Calibration. Samer M Abdallah, PhD
 Computer Vision Samer M Abdallah, PhD Faculty of Engineering and Architecture American University of Beirut Beirut, Lebanon Geometric Camera Calibration September 2, 2004 1 Computer Vision Geometric Camera
Computer Vision Samer M Abdallah, PhD Faculty of Engineering and Architecture American University of Beirut Beirut, Lebanon Geometric Camera Calibration September 2, 2004 1 Computer Vision Geometric Camera
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION
 CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
Announcements. Motion. Structure-from-Motion (SFM) Motion. Discrete Motion: Some Counting
 Motion. Discrete Motion: Some Counting") Announcements Motion HW 4 due Friday Final Exam: Tuesday, 6/7 at 8:00-11:00 Fill out your CAPES Introduction to Computer Vision CSE 152 Lecture 20 Motion Some problems of motion 1. Correspondence: Where
Announcements Motion HW 4 due Friday Final Exam: Tuesday, 6/7 at 8:00-11:00 Fill out your CAPES Introduction to Computer Vision CSE 152 Lecture 20 Motion Some problems of motion 1. Correspondence: Where
CSE 527: Intro. to Computer
 CSE 527: Intro. to Computer Vision CSE 527: Intro. to Computer Vision www.cs.sunysb.edu/~cse527 Instructor: Prof. M. Alex O. Vasilescu Email: maov@cs.sunysb.edu Phone: 631 632-8457 Office: 1421 Prerequisites:
CSE 527: Intro. to Computer Vision CSE 527: Intro. to Computer Vision www.cs.sunysb.edu/~cse527 Instructor: Prof. M. Alex O. Vasilescu Email: maov@cs.sunysb.edu Phone: 631 632-8457 Office: 1421 Prerequisites:
A New Representation for Video Inspection. Fabio Viola
 A New Representation for Video Inspection Fabio Viola Outline Brief introduction to the topic and definition of long term goal. Description of the proposed research project. Identification of a short term
A New Representation for Video Inspection Fabio Viola Outline Brief introduction to the topic and definition of long term goal. Description of the proposed research project. Identification of a short term
AUTOMATED UAV-BASED VIDEO EXPLOITATION FOR MAPPING AND SURVEILLANCE
 AUTOMATED UAV-BASED VIDEO EXPLOITATION FOR MAPPING AND SURVEILLANCE Stephen Se a, *, Pezhman Firoozfam a, Norman Goldstein a, Melanie Dutkiewicz a, Paul Pace b a MDA Systems Ltd., 13800 Commerce Parkway,
AUTOMATED UAV-BASED VIDEO EXPLOITATION FOR MAPPING AND SURVEILLANCE Stephen Se a, *, Pezhman Firoozfam a, Norman Goldstein a, Melanie Dutkiewicz a, Paul Pace b a MDA Systems Ltd., 13800 Commerce Parkway,
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 7 Part-1 (Convolution Transform Speed-up and Hough Linear Transform) February 26, 2014 Sam Siewert Outline of Week 7 Basic Convolution Transform Speed-Up Concepts
Computer and Machine Vision Lecture Week 7 Part-1 (Convolution Transform Speed-up and Hough Linear Transform) February 26, 2014 Sam Siewert Outline of Week 7 Basic Convolution Transform Speed-Up Concepts
Introductory Techniques For 3-D Computer Vision Unknown Edition By Emanuele Trucco, Alessandro Verri (1998) READ ONLINE
 READ ONLINE") Introductory Techniques For 3-D Computer Vision Unknown Edition By Emanuele Trucco, Alessandro Verri (1998) READ ONLINE If you are searching for a book Introductory Techniques for 3-D Computer Vision unknown
Introductory Techniques For 3-D Computer Vision Unknown Edition By Emanuele Trucco, Alessandro Verri (1998) READ ONLINE If you are searching for a book Introductory Techniques for 3-D Computer Vision unknown
Web site. Introduction to Computer Vision. Computer Vision. Text Book. Computer Vision. Relation to other fields
 Introduction to Computer Vision CS / ECE 181B Tuesday, March 30, 2004 Web site http://www.ece.ucsb.edu/~manj/ece181b http://www.ece.ucsb.edu/~manj/cs181b Prof. B. S. Manjunath ECE/CS Department Last Year
Introduction to Computer Vision CS / ECE 181B Tuesday, March 30, 2004 Web site http://www.ece.ucsb.edu/~manj/ece181b http://www.ece.ucsb.edu/~manj/cs181b Prof. B. S. Manjunath ECE/CS Department Last Year
Computer Vision. I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University
 Computer Vision I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University About the course Course title: Computer Vision Lectures: EC016, 10:10~12:00(Tues.); 15:30~16:20(Thurs.) Pre-requisites:
Computer Vision I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University About the course Course title: Computer Vision Lectures: EC016, 10:10~12:00(Tues.); 15:30~16:20(Thurs.) Pre-requisites:
Lecture 14: Computer Vision
 CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
Computer Vision. Alexandra Branzan Albu Spring 2010
 Computer Vision Alexandra Branzan Albu Spring 2010 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 631): by appointment CENG 421/ ELEC 536 : Computer
Computer Vision Alexandra Branzan Albu Spring 2010 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 631): by appointment CENG 421/ ELEC 536 : Computer
Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40
 Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40 Note 1: Both the analytical problems and the programming assignments are due at the beginning of class on Nov 15,
Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40 Note 1: Both the analytical problems and the programming assignments are due at the beginning of class on Nov 15,
Introduction. Prof. Kyoung Mu Lee SoEECS, Seoul National University
 Introduction 1 Introduction to Computer Vision Introduction Prof. Kyoung Mu Lee SoEECS, Seoul National University Goal and Objectives Introduction 2 To introduce the fundamental problems of computer vision.
Introduction 1 Introduction to Computer Vision Introduction Prof. Kyoung Mu Lee SoEECS, Seoul National University Goal and Objectives Introduction 2 To introduce the fundamental problems of computer vision.
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Course 23: Multiple-View Geometry For Image-Based Modeling
 Course 23: Multiple-View Geometry For Image-Based Modeling Jana Kosecka (CS, GMU) Yi Ma (ECE, UIUC) Stefano Soatto (CS, UCLA) Rene Vidal (Berkeley, John Hopkins) PRIMARY REFERENCE 1 Multiple-View Geometry
Course 23: Multiple-View Geometry For Image-Based Modeling Jana Kosecka (CS, GMU) Yi Ma (ECE, UIUC) Stefano Soatto (CS, UCLA) Rene Vidal (Berkeley, John Hopkins) PRIMARY REFERENCE 1 Multiple-View Geometry
3D Computer Vision 1
 3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
Announcements. Motion. Structure-from-Motion (SFM) Motion. Discrete Motion: Some Counting
 Motion. Discrete Motion: Some Counting") Announcements Motion Introduction to Computer Vision CSE 152 Lecture 20 HW 4 due Friday at Midnight Final Exam: Tuesday, 6/12 at 8:00AM-11:00AM, regular classroom Extra Office Hours: Monday 6/11 9:00AM-10:00AM
Announcements Motion Introduction to Computer Vision CSE 152 Lecture 20 HW 4 due Friday at Midnight Final Exam: Tuesday, 6/12 at 8:00AM-11:00AM, regular classroom Extra Office Hours: Monday 6/11 9:00AM-10:00AM
Introductory Techniques For 3-D Computer Vision By Emanuele Trucco, Alessandro Verri READ ONLINE
 Introductory Techniques For 3-D Computer Vision By Emanuele Trucco, Alessandro Verri READ ONLINE AbeBooks.com: Introductory Techniques for 3-D Computer Vision (9780132611084) by Emanuele Trucco; Alessandro
Introductory Techniques For 3-D Computer Vision By Emanuele Trucco, Alessandro Verri READ ONLINE AbeBooks.com: Introductory Techniques for 3-D Computer Vision (9780132611084) by Emanuele Trucco; Alessandro
Expectations. Computer Vision. Grading. Grading. Our Goal. Our Goal
 Computer Vision Expectations Me. Robert Pless pless@cse.wustl.edu 518 Lopata Hall. Office Hours: Thursday 7-8 Virtual Office Hours: Tuesday 3-4 (profpless on AIM, YahooMessenger) Class. CSE 519, Computer
Computer Vision Expectations Me. Robert Pless pless@cse.wustl.edu 518 Lopata Hall. Office Hours: Thursday 7-8 Virtual Office Hours: Tuesday 3-4 (profpless on AIM, YahooMessenger) Class. CSE 519, Computer
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
Introducing Robotics Vision System to a Manufacturing Robotics Course
 Paper ID #16241 Introducing Robotics Vision System to a Manufacturing Robotics Course Dr. Yuqiu You, Ohio University c American Society for Engineering Education, 2016 Introducing Robotics Vision System
Paper ID #16241 Introducing Robotics Vision System to a Manufacturing Robotics Course Dr. Yuqiu You, Ohio University c American Society for Engineering Education, 2016 Introducing Robotics Vision System
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Computer Vision: Making machines see
 Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where