Computer Animation. Rick Parent
|
|
|
- Marcia Strickland
- 6 years ago
- Views:
Transcription
1 Algorithms and Techniques Kinematic Linkages
2 Hierarchical Modeling Relative motion Parent-child relationship Simplifies motion specification Constrains motion Reduces dimensionality
3 Modeling & animating hierarchies 3 aspects 1. Linkages & Joints the relationships 2. Data structure how to represent such a hierarchy 3. Converting local coordinate frames into global space
4 Some terms Joint allowed relative motion & parameters Joint Limits limit on valid joint angle values Link object involved in relative motion Linkage entire joint-link hierarchy Armature same as linkage End effector most distant t link kin linkage Articulation variable parameter of motion associated with joint Pose configuration of linkage using given set of joint angles Pose vector complete set of joint angles for linkage Arc of a tree data structure corresponds to a joint Node of a tree data structure corresponds to a link
5 Use of hierarchies in animation Forward Kinematics (FK) animator specifies values of articulation variables global transform for each linkage is computed Inverse Kinematics (IK) animator specifies final desired global transform for end effector (and possibly other linkages) Values of articulation variables are computed


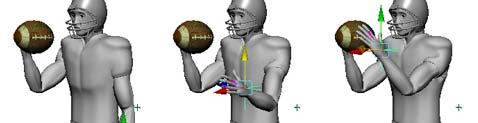

6 Forward & Inverse Kinematics
7 Joints relative movement
8 Comple Joints
9 Hierarchical structure
10 Tree structure
11 Tree structure
12 Tree structure
13 Relative movement
14 Relative movement
15 Tree structure
16 Tree structure
17 Implementation note Nodes & arcs NODE Pointer to data Data transformation Pointer to arcs ARC Transform of one net node relative to parent node Articulation transform Pointer to node
18 Implementation note Representing arbitrary number of children with fied-length data structure Use array of pointers to children In node arcptr[] Node points to first child Each child points to sibling Last sibling points to NULL In node: arcptr for 1 st child In arc: arcptr for sibling
19 Tree traversal L A dm traverse (arcptrmatri) { // concatenate arc matrices matri = matri*arcptr->lmatri matri = matri*arcptr->amatri; // get node and transform data nodeptr=acrptr->nodeptr push (matri) matri = matri * nodeptr->matri adata = transformdata(matridataptr) draw(adata) matri = pop(); } // process children If (nodeptr->arcptr!= NULL) { netarcptr = nodeptr-> arcptr while (netarcptr!= NULL) { push(matri) traverse(netarcptrmatri) matri = pop() netarcptr = netarcptr->arcptr } }
20 OpenGL Single linkage glpushmatri(); For (i=0; i<numdofs; i++) { } glpopmatri(); glrotatef(a[i]ais[i][0] ais[i][1] ais[i][2]); if (linklen[i]!= 0.0) { draw_linkage(linklen[i]); gltranslatef(0.0linklen[i]0.0); } OpenGL concatenates matrices A[i] joint angle Ais[i] joint ais linklen[i] length of link
21 Inverse kinematics Given goal position (and orientation) for end effector Compute internal joint angles If simple enough => analytic solution Else => numeric iterative solution
22 Inverse kinematics - spaces Configuration i space Reachable workspace Detrous workspace


23 Analytic inverse kinematics 2 2 L1 + L2 ( X + Y θ2 = a cos( 2L L ) )
24 IK - numeric If linkage is too comple to solve analytically E.g. human arm is typically modeled as or linkage Solve iteratively numerically solve for step toward goal Desired change from this specific pose Compute set of changes to the pose to effect that change
25 IK math notation IK math notation ) ( f y = ) ( ) ( ) ( f y f y f y = = ) ( ) ( f y f y = = ) ( ) ( f y f y = = ( 6) y 6 f 6 ( ) X Y = F
26 IK chain rule dy fi d fi 2 fi 3 fi 4 fi 5 fi = dt 1 dt 2 dt 3 dt 4 dt 5 dt 6 i 1 6 dt Y & F = X X&
27 Inverse Kinematics - Jacobian Y& = F X X& V = J ( θ )θ & Desired motion of end effector Unknown change in articulation variables The Jacobian is the matri relating the two: it s a function of current variable ibl values
28 Inverse Kinematics - Jacobian V = J ( θ )θ & V = [ v v v ω ω ω ] & θ = [& θ ] 1 & θ2 & θ3 & θ4 & θ5 & θ6 y z y z Change in position Change in orientation J = p p p K θ 1 θ2 θ6 p y K θ 1 K α z α z θ 1 θ 6 Change in articulation variables Jacobian
29 IK computing the Jacobian an (need to convert to global coordinates) Change in orientation Change in position Only valid instantaneously
30 IK - configuration
31 IK compute positional change vectors induced by changes in joint angles Instantaneous positional change vectors Desired change vector One approach to IK computes linear combination of change vectors that equal desired vector
32 IK compute position and ais of joints Set identity matri for (i=0; i<numdofs; i++) { record_transformed_joint(i) glrotate(angle[i]ais[i][0]ais[i][1]ais[i][2]); append_rotation(angle[i]ais[i][0]ais[i][1]ais[i][2]); if (linklen[i]!= 0) { draw_linkage(linklen[i]); gltranslatef(0.0linklen[i]0.0); append _ translation(0linklen[i]0); } } record_endeffector();
33 IK append rotation If joint ais is: one of major aes: 3 cases ofsimple rotation Arbitrary ais angle-ais ais to matri conversion IK append translation Form translation matri Matri Transformed coordinate system Position Transforms ais of rotation
34 IK record joint information Joint position last column of matri Joint coordinate system upper left 33 submatri Joint ais transform local joint ais vector by matri
35 IK - singularity Some singular configurations are not so easily recognizable Near singular configurations are also problematic why?
36 Inverse Kinematics - Numeric Given Current configuration Goal position/orientation Determine Goal vector Positions & local coordinate systems of interior joints (in global coordinates) Jacobian V = J ( θ )θ & Is in same form as more recognizable : A = b Solve & take small step or clamp acceleration or clamp velocity Repeat until: Within epsilon of goal Stuck in some configuration Taking too long
37 Solving If J square compute inverse J -1 If J not square usually under-constrained: more DoFs than constraints Requires use of pseudo-inverse of fjacobian V = J & θ J T V = J T J & θ ( T = J J ) 1 T J V ( T 1 T J J ) J J & θ J + V = θ &
38 Solving Avoid direct computation of inverse by substitution solving A=B form then substituting back V J V J T T = J & θ β = & θ T = JJ β β = & θ
39 IK Jacobian solution
40 IK Jacobian solution - problem When goal is out of reach Bizarre undulations can occur As armature tries to reach the unreachable Add a damping factor
41 IK Jacobian w/ damped least squares J T 1 θ & ( ) = J J T Undamped form: V Damped form with user parameter: θ & = J ( JJ T + λ 2 I ) T 1 V
42 IK Jacobian w/ control term Physical systems (i.e. robotics) and synthetic character simulation (e.g. human figure) have limits on joint values IK allows joint angle to have any value Difficult (computationally epensive) to incorporate hard constraints on joint values Take advantage of redundant manipulators - Allow user to set parameter that urges DOF to a certain value Does not enforce joint limit constraints but can be used to keep jit joint angles at mid-range values
43 IK Jacobian w/ control term IK Jacobian w/ control term 1 ) ( z I J J V J θ + = + + & 2 ) ( ) ( ci i i z z I J J V J θ θ α θ = + ) ( = = + z I J J J V J V θ & 0 ) ( ) ( = = + z V z J J JJ V 0 0 = = V z V Change to the pose parameter in the form of the Change to the pose parameter in the form of the control term adds nothing to the velocity
44 IK Jacobian w/ control term All bias to 0 Top gains = { } Bottomgains={01 { } 05} & θ = J z + V + ( J = α ( θ θ i ( i ci + ) J 2 I ) 1 z
45 IK alternate Jacobian Jacobian formulated ltdto pull llthe goal toward the end effector Use same method to form Jacobian but use goal coordinates instead of end-effector coordinates
46 IK Transpose of the Jacobian Compute how much the change vector contributes to the desired change vector: Project tjoint change vector onto desired dchange vector Dot product of joint change vector and desired change vector => >Transpose of fthe Jacobian
47 IK Transpose of the Jacobian p = θ & J T V v α z p p y z y v v V θ θ θ z y T p p J K K = y V ω ω = 2 α θ z T p J K z ω 6 θ 6 θ z p
48 IK cyclic coordinate descent Heuristic solution Consider one joint at a time from outside in At each joint choose update that best gets end effector to goal position In 2D pretty simple ais i J i Goal EndEffector
49 IK cyclic coordinate descent In 3D a bit more computation is needed
50 IK 3D cyclic coordinate descent Goal ais i J i Projected goal EndEffector First goal has to be projected onto plane defined by ais (normal to plane) and EF Second determine angle at joint
51 IK cyclic coordinate descent 3D Other orderings of processing joints are possible Because of its procedural nature Lends itself to enforcing joint limits Easy to clamp angular velocity
52 Inverse kinematics - review Analytic method Forming the Jacobian Numeric solutions Pseudo-inverse of the Jacobian J + with damping J + with control term Alternative Jacobian Transpose of the Jacobian Cyclic Coordinate Descent (CCD)
53 Inverse kinematics - orientation Change in orientation at end-effector is same as change at joint ais i J i EF
54 Inverse kinematics - orientation How to represent orientation (at goal at end-effector)? How to compute difference between orientations? How to represent desired change in orientation in V vector? How to incorporate into IK solution? Matri representation: M g M ef Difference M d = M ef -1 M g Use scaled ais of rotation: θ(a a y a z ): Etract quaternion from M d Etract (scaled) ais from quaternion E.g. use Jacobian Transpose method: Use projection of scaled djoint ais onto etracted t ais
4 Kinematic Linkages. Chapter 4. Kinematic Linkages. Department of Computer Science and Engineering 4-1
 Kinematic Linkages 4-1 Introduction In describing an object s motion, it is often useful to relate it to another object. Consider, for eample a coordinate system centered at our sun in which the moon s
Kinematic Linkages 4-1 Introduction In describing an object s motion, it is often useful to relate it to another object. Consider, for eample a coordinate system centered at our sun in which the moon s
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
autorob.github.io Inverse Kinematics UM EECS 398/598 - autorob.github.io
 autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
KINEMATICS FOR ANIMATION. Rémi Ronfard, Animation, M2R MOSIG
 KINEMATICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Direct and inverse kinematics in animation Fast numerical methods for inverse kinematics by Bill Baxter My Adventures with Inverse Kinematics
KINEMATICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Direct and inverse kinematics in animation Fast numerical methods for inverse kinematics by Bill Baxter My Adventures with Inverse Kinematics
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute What are the DH parameters for describing the relative pose of the two frames?
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute What are the DH parameters for describing the relative pose of the two frames?
CS 775: Advanced Computer Graphics. Lecture 3 : Kinematics
 CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
CS 775: Advanced Computer Graphics Lecture 3 : Kinematics Traditional Cell Animation, hand drawn, 2D Lead Animator for keyframes http://animation.about.com/od/flashanimationtutorials/ss/flash31detanim2.htm
Articulated Characters
 Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018
 CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018") Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018 Welman, 1993 Inverse Kinematics and Geometric Constraints for Articulated Figure Manipulation, Chris
Inverse Kinematics (part 1) CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018 Welman, 1993 Inverse Kinematics and Geometric Constraints for Articulated Figure Manipulation, Chris
02/22/02. Assignment 1 on the web page: Announcements. Test login procedure NOW!
 Announcements Assignment on the web page: www.cs.cmu.edu/~jkh/anim_class.html est login procedure NOW! 0//0 Forward and Inverse Kinematics Parent: Chapter 4. Girard and Maciejewski 985 Zhao and Badler
Announcements Assignment on the web page: www.cs.cmu.edu/~jkh/anim_class.html est login procedure NOW! 0//0 Forward and Inverse Kinematics Parent: Chapter 4. Girard and Maciejewski 985 Zhao and Badler
Kinematics. CS 448D: Character Animation Prof. Vladlen Koltun Stanford University
 Kinematics CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Kinematics Kinematics: The science of pure motion, considered without reference to the matter of objects moved, or to the
Kinematics CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Kinematics Kinematics: The science of pure motion, considered without reference to the matter of objects moved, or to the
CS-184: Computer Graphics. Today. Forward kinematics Inverse kinematics. Wednesday, November 12, Pin joints Ball joints Prismatic joints
 CS-184: Computer Graphics Lecture #18: Forward and Prof. James O Brien University of California, Berkeley V2008-F-18-1.0 1 Today Forward kinematics Inverse kinematics Pin joints Ball joints Prismatic joints
CS-184: Computer Graphics Lecture #18: Forward and Prof. James O Brien University of California, Berkeley V2008-F-18-1.0 1 Today Forward kinematics Inverse kinematics Pin joints Ball joints Prismatic joints
CS545 Contents IX. Inverse Kinematics. Reading Assignment for Next Class. Analytical Methods Iterative (Differential) Methods
 Methods") CS545 Contents IX Inverse Kinematics Analytical Methods Iterative (Differential) Methods Geometric and Analytical Jacobian Jacobian Transpose Method Pseudo-Inverse Pseudo-Inverse with Optimization Extended
CS545 Contents IX Inverse Kinematics Analytical Methods Iterative (Differential) Methods Geometric and Analytical Jacobian Jacobian Transpose Method Pseudo-Inverse Pseudo-Inverse with Optimization Extended
Triangulation: A new algorithm for Inverse Kinematics
 Triangulation: A new algorithm for Inverse Kinematics R. Müller-Cajar 1, R. Mukundan 1, 1 University of Canterbury, Dept. Computer Science & Software Engineering. Email: rdc32@student.canterbury.ac.nz
Triangulation: A new algorithm for Inverse Kinematics R. Müller-Cajar 1, R. Mukundan 1, 1 University of Canterbury, Dept. Computer Science & Software Engineering. Email: rdc32@student.canterbury.ac.nz
Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps
 Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps Oliver Cardwell, Ramakrishnan Mukundan Department of Computer Science and Software Engineering University of Canterbury
Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps Oliver Cardwell, Ramakrishnan Mukundan Department of Computer Science and Software Engineering University of Canterbury
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Maths in Motion. Danny Chapman Cumberland Lodge - February Version for distribution. Procedural animation in video games
 Maths in Motion Procedural animation in video games Danny Chapman Cumberland Lodge - February 2017 Version for distribution 01_BipedLearning 02_SIG05_Showreel - Endorphin Types of animation Types of motion:
Maths in Motion Procedural animation in video games Danny Chapman Cumberland Lodge - February 2017 Version for distribution 01_BipedLearning 02_SIG05_Showreel - Endorphin Types of animation Types of motion:
Kinematic Model of Robot Manipulators
 Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Kinematics: Intro. Kinematics is study of motion
 Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Robots are built to accomplish complex and difficult tasks that require highly non-linear motions.
 Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Lecture 18 Kinematic Chains
 CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
A Detailed Look into Forward and Inverse Kinematics
 A Detailed Look into Forward and Inverse Kinematics Kinematics = Study of movement, motion independent of the underlying forces that cause them September 19-26, 2016 Kinematics Preliminaries Preliminaries:
A Detailed Look into Forward and Inverse Kinematics Kinematics = Study of movement, motion independent of the underlying forces that cause them September 19-26, 2016 Kinematics Preliminaries Preliminaries:
A simple example. Assume we want to find the change in the rotation angles to get the end effector to G. Effect of changing s
 CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
Kinematics, Kinematics Chains CS 685
 Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
A New Algorithm for Measuring and Optimizing the Manipulability Index
 A New Algorithm for Measuring and Optimizing the Manipulability Index Mohammed Mohammed, Ayssam Elkady and Tarek Sobh School of Engineering, University of Bridgeport, USA. Mohammem@bridgeport.edu Abstract:
A New Algorithm for Measuring and Optimizing the Manipulability Index Mohammed Mohammed, Ayssam Elkady and Tarek Sobh School of Engineering, University of Bridgeport, USA. Mohammem@bridgeport.edu Abstract:
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Robotics I. March 27, 2018
 Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Reading. Topics in Articulated Animation. Character Representation. Animation. q i. t 1 t 2. Articulated models: Character Models are rich, complex
 Shoemake, Quaternions Tutorial Reading Topics in Articulated Animation 2 Articulated models: rigid parts connected by joints Animation They can be animated by specifying the joint angles (or other display
Shoemake, Quaternions Tutorial Reading Topics in Articulated Animation 2 Articulated models: rigid parts connected by joints Animation They can be animated by specifying the joint angles (or other display
Intermediate Desired Value Approach for Continuous Transition among Multiple Tasks of Robots
 2 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-3, 2, Shanghai, China Intermediate Desired Value Approach for Continuous Transition among Multiple
2 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-3, 2, Shanghai, China Intermediate Desired Value Approach for Continuous Transition among Multiple
Kinematical Animation.
 Kinematical Animation 3D animation in CG Goal : capture visual attention Motion of characters Believable Expressive Realism? Controllability Limits of purely physical simulation : - little interactivity
Kinematical Animation 3D animation in CG Goal : capture visual attention Motion of characters Believable Expressive Realism? Controllability Limits of purely physical simulation : - little interactivity
Motion Capture. Motion Capture in Movies. Motion Capture in Games
 Motion Capture Motion Capture in Movies 2 Motion Capture in Games 3 4 Magnetic Capture Systems Tethered Sensitive to metal Low frequency (60Hz) Mechanical Capture Systems Any environment Measures joint
Motion Capture Motion Capture in Movies 2 Motion Capture in Games 3 4 Magnetic Capture Systems Tethered Sensitive to metal Low frequency (60Hz) Mechanical Capture Systems Any environment Measures joint
A New Algorithm for Measuring and Optimizing the Manipulability Index
 DOI 10.1007/s10846-009-9388-9 A New Algorithm for Measuring and Optimizing the Manipulability Index Ayssam Yehia Elkady Mohammed Mohammed Tarek Sobh Received: 16 September 2009 / Accepted: 27 October 2009
DOI 10.1007/s10846-009-9388-9 A New Algorithm for Measuring and Optimizing the Manipulability Index Ayssam Yehia Elkady Mohammed Mohammed Tarek Sobh Received: 16 September 2009 / Accepted: 27 October 2009
Manipulator trajectory planning
 Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
COMP30019 Graphics and Interaction Kinematics
 COMP30019 Graphics and Interaction Kinematics Department of Computing and Information Systems The Lecture outline Introduction Forward kinematics Inverse kinematics Kinematics I am robot (am I?) Forward
COMP30019 Graphics and Interaction Kinematics Department of Computing and Information Systems The Lecture outline Introduction Forward kinematics Inverse kinematics Kinematics I am robot (am I?) Forward
Applying Neural Network Architecture for Inverse Kinematics Problem in Robotics
 J. Software Engineering & Applications, 2010, 3: 230-239 doi:10.4236/jsea.2010.33028 Published Online March 2010 (http://www.scirp.org/journal/jsea) Applying Neural Network Architecture for Inverse Kinematics
J. Software Engineering & Applications, 2010, 3: 230-239 doi:10.4236/jsea.2010.33028 Published Online March 2010 (http://www.scirp.org/journal/jsea) Applying Neural Network Architecture for Inverse Kinematics
Control of industrial robots. Kinematic redundancy
 Control of industrial robots Kinematic redundancy Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Kinematic redundancy Direct kinematics
Control of industrial robots Kinematic redundancy Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Kinematic redundancy Direct kinematics
Trajectory Optimization
 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Maya Lesson 8 Notes - Animated Adjustable Desk Lamp
 Maya Lesson 8 Notes - Animated Adjustable Desk Lamp To Model the Lamp: 1. Research: Google images - adjustable desk lamp. 2. Print several images of lamps for ideas to model. 3. Make a sketch of the lamp
Maya Lesson 8 Notes - Animated Adjustable Desk Lamp To Model the Lamp: 1. Research: Google images - adjustable desk lamp. 2. Print several images of lamps for ideas to model. 3. Make a sketch of the lamp
Singularity Management Of 2DOF Planar Manipulator Using Coupled Kinematics
 Singularity Management Of DOF lanar Manipulator Using oupled Kinematics Theingi, huan Li, I-Ming hen, Jorge ngeles* School of Mechanical & roduction Engineering Nanyang Technological University, Singapore
Singularity Management Of DOF lanar Manipulator Using oupled Kinematics Theingi, huan Li, I-Ming hen, Jorge ngeles* School of Mechanical & roduction Engineering Nanyang Technological University, Singapore
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
Singularity Handling on Puma in Operational Space Formulation
 Singularity Handling on Puma in Operational Space Formulation Denny Oetomo, Marcelo Ang Jr. National University of Singapore Singapore d oetomo@yahoo.com mpeangh@nus.edu.sg Ser Yong Lim Gintic Institute
Singularity Handling on Puma in Operational Space Formulation Denny Oetomo, Marcelo Ang Jr. National University of Singapore Singapore d oetomo@yahoo.com mpeangh@nus.edu.sg Ser Yong Lim Gintic Institute
Finding Reachable Workspace of a Robotic Manipulator by Edge Detection Algorithm
 International Journal of Advanced Mechatronics and Robotics (IJAMR) Vol. 3, No. 2, July-December 2011; pp. 43-51; International Science Press, ISSN: 0975-6108 Finding Reachable Workspace of a Robotic Manipulator
International Journal of Advanced Mechatronics and Robotics (IJAMR) Vol. 3, No. 2, July-December 2011; pp. 43-51; International Science Press, ISSN: 0975-6108 Finding Reachable Workspace of a Robotic Manipulator
Lecture 2: Kinematics of medical robotics
 ME 328: Medical Robotics Autumn 2016 Lecture 2: Kinematics of medical robotics Allison Okamura Stanford University kinematics The study of movement The branch of classical mechanics that describes the
ME 328: Medical Robotics Autumn 2016 Lecture 2: Kinematics of medical robotics Allison Okamura Stanford University kinematics The study of movement The branch of classical mechanics that describes the
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
NATIONAL UNIVERSITY OF SINGAPORE. (Semester I: 1999/2000) EE4304/ME ROBOTICS. October/November Time Allowed: 2 Hours
 EE4304/ME ROBOTICS. October/November Time Allowed: 2 Hours") NATIONAL UNIVERSITY OF SINGAPORE EXAMINATION FOR THE DEGREE OF B.ENG. (Semester I: 1999/000) EE4304/ME445 - ROBOTICS October/November 1999 - Time Allowed: Hours INSTRUCTIONS TO CANDIDATES: 1. This paper
NATIONAL UNIVERSITY OF SINGAPORE EXAMINATION FOR THE DEGREE OF B.ENG. (Semester I: 1999/000) EE4304/ME445 - ROBOTICS October/November 1999 - Time Allowed: Hours INSTRUCTIONS TO CANDIDATES: 1. This paper
Chapter 4 Dynamics. Part Constrained Kinematics and Dynamics. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
3. Manipulator Kinematics. Division of Electronic Engineering Prof. Jaebyung Park
 3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
Robotics (Kinematics) Winter 1393 Bonab University
 Winter 1393 Bonab University") Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Chapter 3 : Computer Animation
 Chapter 3 : Computer Animation Histor First animation films (Disne) 30 drawings / second animator in chief : ke frames others : secondar drawings Use the computer to interpolate? positions orientations
Chapter 3 : Computer Animation Histor First animation films (Disne) 30 drawings / second animator in chief : ke frames others : secondar drawings Use the computer to interpolate? positions orientations
Animation. CS 4620 Lecture 33. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Serial Manipulator Statics. Robotics. Serial Manipulator Statics. Vladimír Smutný
 Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Use of multilayer perceptrons as Inverse Kinematics solvers
 Use of multilayer perceptrons as Inverse Kinematics solvers Nathan Mitchell University of Wisconsin, Madison December 14, 2010 1 of 12 Introduction 1. Scope 2. Background 3. Methodology 4. Expected Results
Use of multilayer perceptrons as Inverse Kinematics solvers Nathan Mitchell University of Wisconsin, Madison December 14, 2010 1 of 12 Introduction 1. Scope 2. Background 3. Methodology 4. Expected Results
Motion Control Methods for Skeleton Daniel Thalmann
 Motion Control Methods for Skeleton Daniel Thalmann Cagliari, May 2008 Animation of articulated bodies Characters, humans, animals, robots. Characterized by hierarchical structure: skeleton. Skeleton:
Motion Control Methods for Skeleton Daniel Thalmann Cagliari, May 2008 Animation of articulated bodies Characters, humans, animals, robots. Characterized by hierarchical structure: skeleton. Skeleton:
Inverse Kinematics Programming Assignment
 Inverse Kinematics Programming Assignment CS 448D: Character Animation Due: Wednesday, April 29 th 11:59PM 1 Logistics In this programming assignment, you will implement a simple inverse kinematics solver
Inverse Kinematics Programming Assignment CS 448D: Character Animation Due: Wednesday, April 29 th 11:59PM 1 Logistics In this programming assignment, you will implement a simple inverse kinematics solver
Overview. Animation is a big topic We will concentrate on character animation as is used in many games today. humans, animals, monsters, robots, etc.
 ANIMATION Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character is represented
ANIMATION Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character is represented
MEM380 Applied Autonomous Robots Winter Robot Kinematics
 MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
Inverse Kinematics II and Motion Capture
 Mathematical Foundations of Computer Graphics and Vision Inverse Kinematics II and Motion Capture Luca Ballan Institute of Visual Computing Comparison 0 1 A B 2 C 3 Fake exponential map Real exponential
Mathematical Foundations of Computer Graphics and Vision Inverse Kinematics II and Motion Capture Luca Ballan Institute of Visual Computing Comparison 0 1 A B 2 C 3 Fake exponential map Real exponential
METR 4202: Advanced Control & Robotics
 Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
3D Kinematics. Consists of two parts
 D Kinematics Consists of two parts D rotation D translation The same as D D rotation is more complicated than D rotation (restricted to z-ais) Net, we will discuss the treatment for spatial (D) rotation
D Kinematics Consists of two parts D rotation D translation The same as D D rotation is more complicated than D rotation (restricted to z-ais) Net, we will discuss the treatment for spatial (D) rotation
Jacobians. 6.1 Linearized Kinematics. Y: = k2( e6)
") Jacobians 6.1 Linearized Kinematics In previous chapters we have seen how kinematics relates the joint angles to the position and orientation of the robot's endeffector. This means that, for a serial robot,
Jacobians 6.1 Linearized Kinematics In previous chapters we have seen how kinematics relates the joint angles to the position and orientation of the robot's endeffector. This means that, for a serial robot,
Advanced Graphics and Animation
 Advanced Graphics and Animation Character Marco Gillies and Dan Jones Goldsmiths Aims and objectives By the end of the lecture you will be able to describe How 3D characters are animated Skeletal animation
Advanced Graphics and Animation Character Marco Gillies and Dan Jones Goldsmiths Aims and objectives By the end of the lecture you will be able to describe How 3D characters are animated Skeletal animation
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Lecture VI: Constraints and Controllers
 Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Planar Robot Kinematics
 V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Animation. CS 4620 Lecture 32. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Kinematics of Closed Chains
 Chapter 7 Kinematics of Closed Chains Any kinematic chain that contains one or more loops is called a closed chain. Several examples of closed chains were encountered in Chapter 2, from the planar four-bar
Chapter 7 Kinematics of Closed Chains Any kinematic chain that contains one or more loops is called a closed chain. Several examples of closed chains were encountered in Chapter 2, from the planar four-bar
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis
 Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
Resolution of spherical parallel Manipulator (SPM) forward kinematic model (FKM) near the singularities
 forward kinematic model (FKM) near the singularities") Resolution of spherical parallel Manipulator (SPM) forward kinematic model (FKM) near the singularities H. Saafi a, M. A. Laribi a, S. Zeghloul a a. Dept. GMSC, Pprime Institute, CNRS - University of Poitiers
Resolution of spherical parallel Manipulator (SPM) forward kinematic model (FKM) near the singularities H. Saafi a, M. A. Laribi a, S. Zeghloul a a. Dept. GMSC, Pprime Institute, CNRS - University of Poitiers
Rotation and Orientation: Fundamentals. Perelyaev Sergei VARNA, 2011
 Rotation and Orientation: Fundamentals Perelyaev Sergei VARNA, 0 What is Rotation? Not intuitive Formal definitions are also confusing Many different ways to describe Rotation (direction cosine) matri
Rotation and Orientation: Fundamentals Perelyaev Sergei VARNA, 0 What is Rotation? Not intuitive Formal definitions are also confusing Many different ways to describe Rotation (direction cosine) matri
θ x Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul
 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul") θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
1724. Mobile manipulators collision-free trajectory planning with regard to end-effector vibrations elimination
 1724. Mobile manipulators collision-free trajectory planning with regard to end-effector vibrations elimination Iwona Pajak 1, Grzegorz Pajak 2 University of Zielona Gora, Faculty of Mechanical Engineering,
1724. Mobile manipulators collision-free trajectory planning with regard to end-effector vibrations elimination Iwona Pajak 1, Grzegorz Pajak 2 University of Zielona Gora, Faculty of Mechanical Engineering,
TIEA311 Tietokonegrafiikan perusteet kevät 2018
 TIEA311 Tietokonegrafiikan perusteet kevät 2018 ( Principles of Computer Graphics Spring 2018) Copyright and Fair Use Notice: The lecture videos of this course are made available for registered students
TIEA311 Tietokonegrafiikan perusteet kevät 2018 ( Principles of Computer Graphics Spring 2018) Copyright and Fair Use Notice: The lecture videos of this course are made available for registered students
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS
 KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
6.837 Computer Graphics Hierarchical Modeling Wojciech Matusik, MIT EECS Some slides from BarbCutler & Jaakko Lehtinen
 6.837 Computer Graphics Hierarchical Modeling Wojciech Matusik, MIT EECS Some slides from BarbCutler & Jaakko Lehtinen Image courtesy of BrokenSphere on Wikimedia Commons. License: CC-BY-SA. This content
6.837 Computer Graphics Hierarchical Modeling Wojciech Matusik, MIT EECS Some slides from BarbCutler & Jaakko Lehtinen Image courtesy of BrokenSphere on Wikimedia Commons. License: CC-BY-SA. This content
Comparing FABRIK and neural networks to traditional methods in solving Inverse Kinematics
 Comparing FABRIK and neural networks to traditional methods in solving Inverse Kinematics Renzo Poddighe June 18, 2013 Abstract In this paper, two alternative methods to the Inverse Kinematics problem
Comparing FABRIK and neural networks to traditional methods in solving Inverse Kinematics Renzo Poddighe June 18, 2013 Abstract In this paper, two alternative methods to the Inverse Kinematics problem
Solving IK problems for open chains using optimization methods
 Proceedings of the International Multiconference on Computer Science and Information Technology pp. 933 937 ISBN 978-83-60810-14-9 ISSN 1896-7094 Solving IK problems for open chains using optimization
Proceedings of the International Multiconference on Computer Science and Information Technology pp. 933 937 ISBN 978-83-60810-14-9 ISSN 1896-7094 Solving IK problems for open chains using optimization
Animation. Keyframe animation. CS4620/5620: Lecture 30. Rigid motion: the simplest deformation. Controlling shape for animation
 Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
A Comparative Study of Prediction of Inverse Kinematics Solution of 2-DOF, 3-DOF and 5-DOF Redundant Manipulators by ANFIS
 IJCS International Journal of Computer Science and etwork, Volume 3, Issue 5, October 2014 ISS (Online) : 2277-5420 www.ijcs.org 304 A Comparative Study of Prediction of Inverse Kinematics Solution of
IJCS International Journal of Computer Science and etwork, Volume 3, Issue 5, October 2014 ISS (Online) : 2277-5420 www.ijcs.org 304 A Comparative Study of Prediction of Inverse Kinematics Solution of
Manipulation: Mechanisms, Grasping and Inverse Kinematics
 Manipulation: Mechanisms, Grasping and Inverse Kinematics RSS Lectures 14 & 15 Monday & Wednesday, 1 & 3 April 2013 Prof. Seth Teller Overview Mobility and Manipulation Manipulation Strategies Mechanism
Manipulation: Mechanisms, Grasping and Inverse Kinematics RSS Lectures 14 & 15 Monday & Wednesday, 1 & 3 April 2013 Prof. Seth Teller Overview Mobility and Manipulation Manipulation Strategies Mechanism
Animation. Computer Graphics COMP 770 (236) Spring Instructor: Brandon Lloyd 4/23/07 1
 Spring Instructor: Brandon Lloyd 4/23/07 1") Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
Optimization of a two-link Robotic Manipulator
 Optimization of a two-link Robotic Manipulator Zachary Renwick, Yalım Yıldırım April 22, 2016 Abstract Although robots are used in many processes in research and industry, they are generally not customized
Optimization of a two-link Robotic Manipulator Zachary Renwick, Yalım Yıldırım April 22, 2016 Abstract Although robots are used in many processes in research and industry, they are generally not customized
Kinematics. Why inverse? The study of motion without regard to the forces that cause it. Forward kinematics. Inverse kinematics
 Kinematics Inverse kinematics The study of motion without regard to the forces that cause it Forward kinematics Given a joint configuration, what is the osition of an end oint on the structure? Inverse
Kinematics Inverse kinematics The study of motion without regard to the forces that cause it Forward kinematics Given a joint configuration, what is the osition of an end oint on the structure? Inverse
Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots
 15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
Lecture «Robot Dynamics»: Multi-body Kinematics
 Lecture «Robot Dynamics»: Multi-body Kinematics 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Multi-body Kinematics 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Kinematics 3
 Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Inverse KKT Motion Optimization: A Newton Method to Efficiently Extract Task Spaces and Cost Parameters from Demonstrations
 Inverse KKT Motion Optimization: A Newton Method to Efficiently Extract Task Spaces and Cost Parameters from Demonstrations Peter Englert Machine Learning and Robotics Lab Universität Stuttgart Germany
Inverse KKT Motion Optimization: A Newton Method to Efficiently Extract Task Spaces and Cost Parameters from Demonstrations Peter Englert Machine Learning and Robotics Lab Universität Stuttgart Germany
Robot. A thesis presented to. the faculty of. In partial fulfillment. of the requirements for the degree. Master of Science. Zachary J.
 Uncertainty Analysis throughout the Workspace of a Macro/Micro Cable Suspended Robot A thesis presented to the faculty of the Russ College of Engineering and Technology of Ohio University In partial fulfillment
Uncertainty Analysis throughout the Workspace of a Macro/Micro Cable Suspended Robot A thesis presented to the faculty of the Russ College of Engineering and Technology of Ohio University In partial fulfillment
Motion Capture & Simulation
 Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Inverse Kinematics (IK)
") Inverse Kinematics Inverse Kinematics (IK) Given a kinematic chain (serial linkage), the position/orientation of one end relative to the other q 4 q (closed chain), find the values 5 of the joint parameters
Inverse Kinematics Inverse Kinematics (IK) Given a kinematic chain (serial linkage), the position/orientation of one end relative to the other q 4 q (closed chain), find the values 5 of the joint parameters