Semantic Grasping: Planning Robotic Grasps Functionally Suitable for An Object Manipulation Task
|
|
|
- Hugo Dixon
- 6 years ago
- Views:
Transcription




1 Semantic ing: Planning Robotic s Functionally Suitable for An Object Manipulation Task Hao Dang and Peter K. Allen Abstract We design an example based planning framework to generate semantic grasps, stable grasps that are functionally suitable for specific object manipulation tasks. We propose to use partial object geometry, tactile contacts, and hand kinematic data as proxies to encode semantic constraints, which are taskrelated constraints. We introduce a semantic affordance map, which relates local geometry to a set of predefined semantic grasps that are appropriate to different tasks. Using this map, the pose of a robotic hand can be estimated so that the hand is adjusted to achieve the ideal approach direction required by a particular task. A grasp planner is then used to generate a set of final grasps which have appropriate stability, tactile contacts, and hand kinematics along this approach direction. We show experiments planning semantic grasps on everyday objects and executing these grasps with a physical robot. I. INTRODUCTION planning is a fundamental problem in the field of robotics which has been attracting an increasing number of researchers [1], [2], [3], [4], [5], [6], [7]. Previously proposed methods are reasonably successful in generating stable grasps for execution. However, if we consider planning a grasp for a specific manipulation task, the stability of the grasp is no longer sufficient to describe all of the constraints on the grasp. Such constraints include relative hand orientation, specific object parts the hand should make contact with, or specific regions of the object the hand should avoid. We call these constraints required by a specific task semantic constraints. As we will show in Figure 1 and Section III, a good robotic grasp should satisfy the semantic constraints associated with an intended manipulation task. In our work, we take an example-based approach to build a grasp planner that considers semantic constraints of specific tasks as a planning criterion and searches for stable grasps satisfying these semantic constraints. This approach is inspired by psychological research which showed that human grasping is to a very large extent guided by previous grasping experience [8]. To mimic this process, we propose that semantic constraints can be embedded into object geometry, tactile contacts and hand kinematics. We design a semantic affordance map which contains a set of depth images from different views and example grasps that satisfy the semantic constraints of different tasks. These depth images help infer the approach direction with respect to the object, guiding the hand to an ideal approach direction. Predefined example grasps provide hand kinematic and tactile information to the planner as references to the ideal hand posture and tactile This work has been funded by NSF Grant IIS Both authors are with Department of Computer Science, Columbia University, New York, NY, 10027, USA, {dang,allen}@cs.columbia.edu (a) (b) (c) (d) Fig. 1. Stable grasps with different semantic constraints satisfied. All grasps are suitable for Pick-and-Place task. However, in the first two grasps, the hand blocks the opening area of the mug. Thus, they are not suitable for Pouring-Water task. contact formation. Utilizing this information, the planner searches for stable grasps with an ideal approach direction, hand kinematics, and tactile contact formation. II. RELATED WORK For planning stable robotic grasps, Ciocarlie and Allen proposed the eigen-grasp idea [1]. This method effectively reduces the dimension of the search space for grasp planning and results in a faster search process for form-closure grasps. Based on this approach, a data-driven grasping pipeline is proposed by Goldfeder [9]. Geidenstam approximated 3D shapes with bounding boxes on decomposed objects and trained a neural network to learn good grasps [5]. Saxena [2] and Popovic [4] used synthesized image data to train a classifier to predict grasping points based on features extracted from 2D images. Berenson and Srinivasa proposed a method to generate collision-free stable grasps for dexterous hands in cluttered environments [10]. In addition, there has also been some work in planning grasps considering graspable parts and specific tasks. Researchers, such as Li and Sastry [11], Prats et al. [3], and Haschke et al. [6], analyzed task-oriented grasping using task wrench space. These approaches are mainly based on the analysis of the contacts and the potential wrench space of a grasp. Rosales et al. presented a method to solve the configuration problem of a robotic hand to grasp a given object with a specific contact region [12]. Li et al. took a data-driven approach to grasp synthesis using pre-captured human grasps and task-based pruning [13]. Song et al. designed a Bayesian network to model task constraints in goal-oriented grasping [14]. Using a box-based planning approach, Huebner and Kragic presented a pipeline to generate grasps with some task constraints satisfied [15]. Detry et al. developed a method to analyze grasp affordance on objects based on objectedge reconstructions [16]. Aleotti and Caselli proposed a part-based planning algorithm to generate stable grasps from human demonstration [17]. Sahbani and El-Khoury proposed a method to plan grasps on handles of objects by training a classifier on synthesized data [7]. It is widely accepted that
2 ing Model Scene Generator Manipulation Task Database Task Descriptor Generator Execute the Manipulation Chain Planning ing Semantic Affordance Map Manipulation Plan Semantic s Estimate Object Pose Semantic Database Generate a Execute the Manipulate the Object Fig. 2. A typical data driven grasping pipeline considering semantic constraints. In the planning stage, semantic grasps are planned and stored into a semantic grasp database. In a grasping process, planned semantic grasps can be retrieved and executed based on requested manipulation tasks. Once the semantic grasps are executed, a manipulation chain as proposed in [18] could be executed to accomplish a manipulation task. many everyday objects are designed with a graspable part (e.g. a handle). However, with certain knowledge of where the graspable part is, it is still difficult to determine how to grasp the graspable part appropriately. In fact, looking solely at the stability of the grasp, the potential task wrench space, or the location of the graspable part of an object leaves out the following important semantic constraints for object grasping in the context of a specific manipulation task. The first constraint is how a robotic hand is oriented and shaped with respect to the object. The second constraint is the locations of the contacts between the hand and the object. In our work, we are trying to encode them directly and use them to plan semantic grasps accordingly. III. SEMANTIC GRASPING A. Semantic constraints and data-driven grasping Every robotic grasp is used for an intended manipulation task. To perform a specific manipulation task, some constraints are required to be satisfied by the robotic grasp. For a mug, Pick-and-Place and Pouring-Water are two possible manipulation tasks. For Pick-and-Place, stability is one constraint. This constraint requires a grasp to be able to resist possible external disturbances during the manipulation process. For Pouring-Water, stability is still necessary, but in addition to this, an extra constraint might require the robotic hand to avoid blocking the opening area of the mug or to grasp the handle of the mug. In order to plan appropriate grasps for different tasks, satisfying semantic constraints is essential. Figure 1 shows some examples of robotic grasps on a mug that are evaluated as stable grasps according to the epsilon quality [19]. All the grasps in Figure 1 are stable in terms of force/form closure metric and they are all suitable for a Pick-and-Place task. However, if we consider using these grasps for a Pouring- Water task, only grasps shown in Figure 1(c) and 1(d) are suitable because in the first two grasps the palm blocks the opening area of the mug conflicting with the second semantic constraint required by a Pouring-Water task. This example demonstrates that semantic constraints for grasps should be considered in grasp planning procedures. In our work, we follow the data-driven grasping pipeline where grasp planning and execution are separated and focus on developing a planning method that considers semantic constraints. Figure 2 illustrates a typical data-driven grasping pipeline where our method fits in: compared to traditional data-driven grasping pipelines, our method considers semantic constraints in the planning stage while keep the rest of the pipeline intact. It is worth noting that the planning takes place off-line and is within a simulation environment that is separated from the physical execution. B. Embedding semantic constraints Semantic constraints are high-level concepts that are difficult to describe and difficult to generalize. Instead of representing semantic constraints explicitly, we attempt to specify semantic constraints using a predefined example grasp and use the example grasp to infer corresponding semantic constraints. Many everyday objects are designed such that their geometries are appropriate for the corresponding manipulation tasks that they are associated with. For example, a mug has a handle which is designed to be grasped. For a Pouring-Water task, it is always a good strategy to grasp the body of the mug or to grasp the handle from the direction in which it stretches away from the body, because these two grasps satisfy the two semantic constraints a Pouring-Water task requires: 1) grasp stability and 2) avoid blocking the opening area of the mug. Semantic constraints imply requirements on the following aspects: 1) part of the object to be grasped, 2) relative orientation of the hand to the graspable part, 3) hand posture, and 4) contact locations on the hand. The graspable part of an object being approached by a robotic hand can be encoded using 3D depth images of the object from the approach direction of the hand. The depth images describe the partial geometry in view. It also indicates the orientation of this part of the object with respect to the hand. Hand posture can be derived directly from the joint values of the hand and contact information can be extracted from a set of tactile sensor arrays on the hand. Thus, we propose embedding semantic constraints into these related sensory data. Given an example grasp which has already satisfied specific semantic constraints, we can compare these quantities to those of candidate grasps on the same object or novel objects of the same class. If they are similar, we consider the corresponding semantic constraints as satisfied. Otherwise, we consider the semantic constraints as unsatisfied. C. Semantic : a definition We define the semantics of a robotic grasp as the intended manipulation task whose semantic constraints are satisfied by the grasp. It is a symbolic label or a phrase that uniquely identifies a task of the object (e.g. Pouring-Water). A semantic grasp is a robotic grasp that satisfies the semantic constraints imposed by a manipulation task. We write a semantic grasp formally as SG =< S, T, K > where S is the semantic label of the grasp, e.g. Pouring- Water; T is the tactile contacts of the grasp, e.g. arrays
3 of tactile sensor reading; K is the hand kinematic data of the grasp, e.g. a set of joint angles and the orientation and location of the wrist. D. Semantic Affordance Map: a definition In Section III-B, we discussed that the semantic constraints can be indirectly embedded in the object range data, hand kinematic data, and tactile contacts. We now introduce a semantic affordance map M C to associate semantic grasps with an object class C. A semantic affordance map M C is a set of triples: M C = {< P, F(D), B >}, (B = {SG}) where P is the approach direction from the hand to the object; D is a depth image of the object from P; F( ) is a function that extracts features from D; B is a set of semantic grasps from P. In this map, the following two relations are established. 1. F(D) P, given an image feature descriptor F(D) of a depth image of the object from a particular viewing angle (approach direction), this mapping tells us the current approach direction of the hand to the object. If the object is symmetric, this mapping can be one to many. 2. F(D) B, given an image feature descriptor F(D) of a depth image of the object from a particular viewpoint, this mapping tells us the possible semantic grasps on the corresponding geometry. A semantic affordance map is considered as a manual for semantic usage of an object. In a semantic affordance map, it is probable that many triples have an empty set of semantic grasps. This is because there are many approach directions that are not good for any manipulation tasks. So, only a few B s in a semantic affordance map contain semantic grasps. E. Method overview: planning semantic grasps Our planning method is inspired by Castiello who showed that both cognitive cues and knowledge from previous experience play major roles in visually guided grasping [8]. We use an example-based approach to mimic this experience-based method. By analogy, M C acts like an experience base. B records all the successful grasps that are experienced before. P and D are used to mimic human knowledge of the object geometry. To plan a grasp with semantics S on an object of class C, we assume a semantic affordance map on this object class, M C, has been given. First, a semantic grasp of semantics S is retrieved from M C. Then, an initial approach direction is randomly chosen and a depth image of the object from this approach direction is taken. With the depth image, the current hand approach direction to the object is estimated by looking up in the semantic affordance map. Utilizing this estimated approach direction, along with the tactile and kinematic information stored in the predefined semantic grasp, our method adjusts the hand to the ideal approach direction and searches along the ideal approach direction for grasps that have similar tactile contact formation and hand kinematics. Fig. 3. Shape context computation. C xyz is the camera coordinate system with its origin at point C. In an eye-on-hand system, C is also the origin of the palm. The three dimensions of the spherical coordinate system for our shape context feature are as follows: d is the depth from the origin of the camera; α is the latitude in the camera coordinate system; β is the longitude in the camera coordinate system. With all these similarities being achieved, we consider the semantic constraints specified by the predefined semantic grasp are also satisfied by the newly planned grasp. In the following sections, we discuss in detail how to build a semantic affordance map for an object class and how a grasp planner uses it to plan semantic grasps for a specific manipulation task. IV. BUILDING A SEMANTIC AFFORDANCE MAP A semantic affordance map is dedicated to one object class. It is built in simulation and is designed to be a knowledge base that stores semantic grasps suitable for possible manipulation tasks an object could be involved in. It also provides hints to a grasp planner about how to satisfy these semantic constraints by relating semantic grasps with partial object geometry and approach directions. To build a semantic affordance map, we first choose a representative object of an object class and collect depth images from different approach directions to this object. Then, these depth images are encoded and example semantic grasps are manually defined. A. Sampling strategy To sample around an object in simulation and obtain the object s partial geometry information, we first create a unit sphere centered at the geometrical center of the object model. Along the latitude lines and the longitude lines, every two degrees, we collect a depth image of the object model using OpenGL. The virtual camera in OpenGL is placed at the crossing of the longitude and latitude with its horizontal axis aligned with the latitude line and its depth axis aligned with the radius of the sphere. We also move the virtual camera along the radius such that the bounding box of the object model is right within the field of view. By doing this, we make sure that the entire object model is in the view. B. Encoding a depth image Given a set of sampled depth images using the strategy above, we encode them such that they can be used as keys to index all the samples effectively. Then, using the relation F(D) P as in Section III-D, we can estimate the approach direction of the hand given a depth image from an unknown
4 direction. To encode a depth image, we use a similar idea from the shape context method [20]. Figure 3 illustrates the spherical coordinate system to compute the shape context, which co-locates with the camera s coordinate system C xyz. The discretization of the spherical space is along the latitude (α), the longitude (β), and the depth (d). In this case, the shape context vector stores the distribution of the object surface points over this discretized spherical segment where the points exist. C. Recording semantic grasps From the previous sampling step, we have already computed all the P s and F(D) s of a semantic affordance map. To input sets of semantic grasps and complete a semantic affordance map, we manually select a good approach direction for each possible manipulation task with some semantics. Along this approach direction, a semantic grasp can be specified manually. Then, the following information is recorded and associated with this semantic grasp. 1) Hand kinematics: Hand kinematic data is stored only with a semantic grasp. This data indicates the shape of the hand when the grasp is applied. To store the hand kinematics, we store the angle value for each joint. 2) Tactile contacts: In order to represent where a hand is in contact with the object, we take into consideration the tactile contacts when a grasp is being applied on an object. In a semantic grasp, we use T to store the readings from the simulated tactile sensor pads. If there is more than one approach direction for a specific manipulation task, we apply the same method to define additional semantic grasps along other approach directions. V. PLANNING SEMANTIC GRASPS Given a manipulation task and a semantic affordance map, planning a semantic grasp on a target object can be thought of as a search for grasps that satisfy the semantic constraints indicated by a predefined semantic grasp. A planning procedure includes the following three steps. A. Step 1: Retrieve semantic grasps The first step is to retrieve a predefined semantic grasp from the semantic affordance map. This is done by searching within the semantic affordance map and looking for semantic grasps with an appropriate semantic label according to the requested manipulation task. In the following steps of the pipeline, we will use this semantic grasp as a reference for planning. B. Step 2: Achieve the ideal approach direction The first semantic constraint we need to satisfy is the geometric constraint which requires a specific part of the object to be grasped. This constraint can be implicitly inferred by the approach direction of the hand. So, in order to get to the most appropriate approach direction required by the semantic constraints, we first estimate the current approach direction of the hand. To do this, a depth image of the object is taken from the hand s current approach direction. We encode the depth image as in Section IV-B to get the shape context feature. Then, we look up in the semantic affordance map and search for k nearest neighbors based on this geometry feature. To match against the entries in the semantic affordance map, we used χ 2 distance to calculate the difference between two geometry features. Since k could be larger than one, we need to use some rules to decide a neighbor that is most widely agreed among these k nearest neighbors. To do this, we calculate a cumulative distance for each neighbor from the remaining neighbors, which indicates the extent to which other neighbors disagree with it. Algorithm 1 illustrates this scheme, where D( ) denotes a distance function that calculates the actual angle between the approach directions represented by the two neighbors. Algorithm 1: Computing the most agreed neighbor Input: k nearest neighbors N = {n 1,..., n k } Output: the most agreed neighbor n m 1 Initialize array v with k entries for cumulative distances 2 foreach n i N do 3 foreach n j N {n j } do 4 v[i]+ = D(n i, n j ); 5 v[j]+ = D(n i, n j ); 6 end 7 end 8 n m = 1 st neighbor with a minimum cumulative distance 9 return n m Once the current approach direction is estimated, adjustment can be done by calculating the transform between the current approach direction and the ideal approach direction that satisfies the semantic constraints. C. Step 3: Refine the grasp Based on the previous two steps, a promising hand approach direction has been achieved for the specific manipulation task. This is only a good start to satisfy all the semantic constraints embedded in the predefined semantic grasp, because solely relying on the approach direction is not sufficient. For example, the stability of the grasp, similar kinematics, and tactile contacts of the hand cannot be guaranteed simply by approaching the object from an ideal direction. We consider them in a grasp refinement step. In this step, we first use the eigen-grasp planner to generate a sequence of potential stable grasps along the approach direction [1]. We then sort them according to their similarities with the predefined semantic grasp. 1) Stability: To ensure the grasp stability, we use epsilon quality as a quality metric [19]. The planner checks the epsilon quality each time it finds a promising solution and outputs only those grasps that have positive epsilon qualities. 2) Hand Kinematics: During this refinement procedure, we use an eigen-grasp planner to search for grasps around the ideal approach direction as discussed in [1]. We first place a constraint on the hand kinematics, i.e. the DOF s
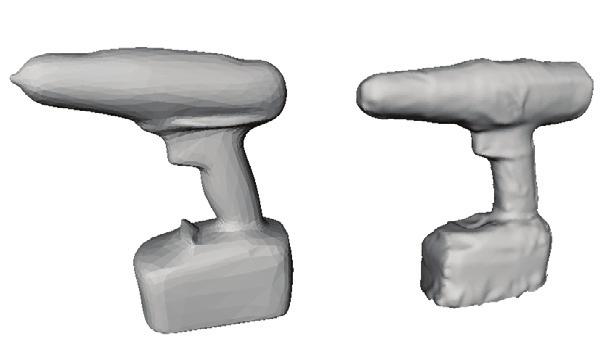
5 TABLE I OBJECTS, MANIPULATION TASKS, AND SEMANTIC CONSTRAINTS Object Manipulation Task Semantic Constraints Mug pour water not blocking the opening area Phone answer a call grasping the handle Door handle pull/push the door power grasping the mid-point Door handle slide the door hook grasping the mid-point Drill hold and drill grasping the handle of the hand. We use the corresponding eigen-grasps of the DOF values recorded in the semantic grasp as a kinematic reference and probabilistically limit the search region to be around this kinematic reference. Based on this, the output grasps of the planner should share similar kinematics of the example semantic grasp, maximumly preserving a similar hand posture during grasping. 3) Tactile Contacts: Similar tactile contact formation as recorded in the predefined semantic grasps is achieved by comparing the reading of each sensor pad attached to each link. With similar tactile contacts, we expect the hand to touch similar parts of the object which improves the possibility that the planned grasp holds the object in the way which is defined in the example semantic grasp. VI. EXPERIMENTS We conducted two levels of experiments: planning semantic grasps inside the It! simulator [21] and grasping physical objects with planned semantic grasps using a physical robot, which correspond to the first two levels shown in Figure 2. Table I summarizes everyday objects that were chosen for our test and the corresponding semantic constraints of each task the grasp should be suitable for. A. Planning semantic grasps In table-top object manipulation tasks, objects are usually placed in their canonical upright orientations. So, we assumed that all the object models were defined in their canonical upright orientations with respect to a common plane. For each of the object classes in Table I, we chose a source object model as a representative (shown in the left part of the third column in Figure 4) to build a semantic affordance map. Using OpenGL, we first generated depth images of the representative object model from different approach directions. To define example semantic grasps, we used the it! simulator to manually record stable grasps suitable for related tasks. Tactile sensors were simulated based on the soft finger model proposed by Ciocarlie et al. [22]. By associating example semantic grasps with the depth images, we built a semantic affordance map for an object class. With a semantic affordance map, we then chose different object models from the same object class as targets and used the proposed algorithm to plan semantic grasps on them. The target objects were different from the source models that were used to build the semantic affordance maps, as they had different sizes and shapes. In Figure 4, we show experimental results of planning semantic grasps on different object models. In each row, the second column shows a predefined semantic grasp that was stored in the semantic affordance maps. The third column shows the comparison of the geometry between the source(left) and the target(right) objects. The source objects are those ones that were used for building semantic affordance maps. They are different from the target objects, but similar in shape. The last two columns show the top two ranked grasps generated by our planning method according to their tactile and hand posture similarities. The experimental results indicate that, by using our planning algorithm, semantic grasps can be synthesized from similar objects with predefined example semantic grasps. B. Semantic grasping with a physical robot Following the planning experiments, we connected our planning method to a grasp execution system and tested an entire grasping pipeline from modeling a physical object using an off-the-shelf 3D scanner to planning a semantic grasp on the model and to executing a semantic grasp for a requested manipulation task on a physical object. We chose a mug, a phone, and a drill as target objects, shown in experiments 3, 5, and 8 in Figure 4 respectively. A NextEngine 3D scanner was used to obtain geometrical models of the physical objects (shown in the right part of the third column of each experiment). Using our proposed method, we then planned semantic grasps and stored them in a semantic grasp database. In the grasping stage, a target object was placed in front of the robot. A Kinect sensor acquired a 3D point cloud of the scene. The recognition method proposed by Papazov et al. [23] was used in our perception system, which uses partial geometry of an object to recover its full 6D pose. Once the pose of an object was recovered, a planned semantic grasp was retrieved from the semantic grasp database according to the object name and the semantic label. Finally, the OpenRave [24] planner generated a collision-free trajectory to the final grasping pose and the hand moved to the target pose and executed the grasp. Figure 5 shows snapshots of the process of the grasping pipeline using semantic grasps in the experiments. The first two columns show the predefined semantic grasps on the source objects and the generated semantic grasps on the target objects. The third column shows the physical objects placed in the robot workspace. The fourth column shows the point clouds of the workspace reconstructed from a Kinect sensor. The fifth column shows the final grasp of a Barrett hand. VII. CONCLUSION AND DISCUSSION In this paper, we develop an example-based grasp planning method to plan stable robotic grasps which satisfy semantic constraints required by a specific manipulation task. We propose using partial object geometry, hand kinematic data, and tactile contacts to embed semantic constraints. We also introduce a semantic affordance map which relates partial geometry features to semantic grasps. Using this map, our



















![point [5] S. Geidenstam, K.](/docs-images/77/76217597/images/6-19.jpg "Huebner, Banksell, and D.")
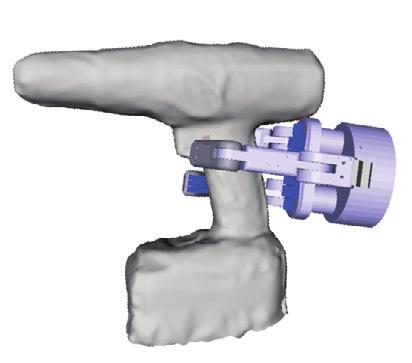



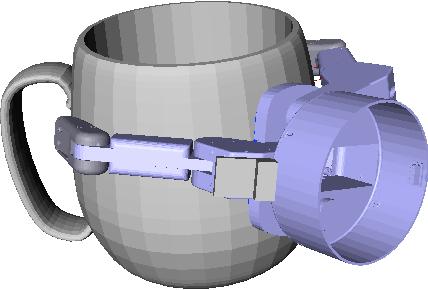

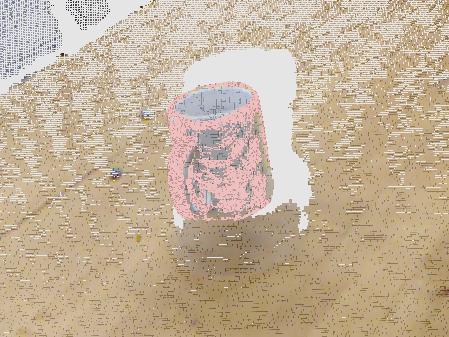

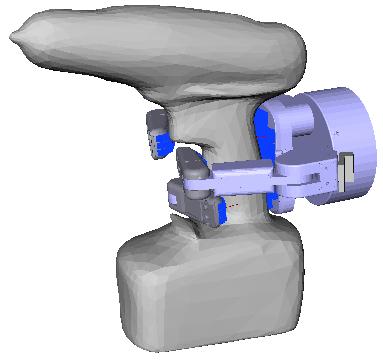
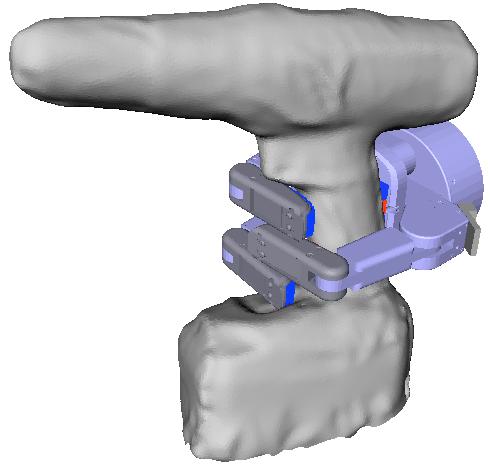



6 ID Predefined Semantic 1 mug sg1 2 mug sg1 3 mug sg1 4 phone sg1 5 phone sg1 6 handle sg1 7 handle sg2 8 drill sg1 Source Object vs. Target Object 1 2 Fig. 4. Semantic grasps planned on typical everyday objects. From left to right: experiment ID, the predefined semantic grasps stored in the semantic affordance map, a pair of source object and target object for each experiment, and top two grasps generated. Last two columns for the top two grasps were obtained within 180 seconds and are both stable in terms of their epsilon quality. Some objects are displayed with transparency to show the grasp. Fig. 5. ing physical objects with semantic grasps. From left to right: predefined semantic grasps on source objects, semantic grasps on target objects generated using the proposed method, a snapshot of the physical object in the workspace, reconstructed point cloud of the object in the workspace, and Fig. 5. ing physical the objects with semantic grasps. leftpink to points right:in predefined grasps objects, final grasp of a Barrett hand attached to a From Staubli arm. the point clouds semantic are object models placed on withsource the estimated pose. semantic grasps on target objects generated using the proposed method, a snapshot of the physical object in the workspace, reconstructed point cloud of the object in the workspace, and a grasp. For example, we didarm. not Pink check points whetherinthethe point [5] S. Geidenstam, K. Huebner, Banksell, and D. Kragic, Learning the final grasp of a Barrettofhand attached to a Staubli clouds are objectd. models placed with the ofestimated pose. 2D grasping strategies from box-based 3D object approximations, in robot is able to execute the grasp in a real environment due to collisions or other workspace constraints. This could be solved by using collision checking to filter out infeasible grasps after a number of good semantic grasps are produced or utilizing algorithms such as in [26] to achieve the required pre-grasp pose of the object. For the next step, we will be considering possible ways to generalize the semantic affordance map so that it would Proceedings of Robotics: Science and Systems, June [6] R. Haschke, J. J. Steil, I. Steuwer, and H. Ritter, Task-oriented quality measures for dextrous grasping, in Proc. Conference on Computational Intelligence in Robotics and Automation, [7] A. Sahbani and S. El-Khoury, A hybrid approach for grasping 3d objects, in IROS, pp , [8] U. Castiello, The neuroscience of grasping, Nature Reviews Neuroscience, vol. 6, pp , September [9] C. Goldfeder and P. K. Allen, Data-driven grasping, Auton. Robots, vol. 31, pp. 1 20, July 2011.
7 method considers the semantic constraints imposed by a specific task and plans semantic grasps accordingly. We show experiments of planning and executing semantic grasps on everyday objects. A model of the object may not be necessary. For a system where grasp planning and executing are separated, it is ideal to get the model of the object beforehand. If the object model is not obtained in advance, some existent modeling algorithms can be used to reconstruct the object from the real scene using depth sensors, such as a Kinect sensor. Another approach can be to connect this algorithm with a physical robot system, obtaining depth images directly from physical depth sensors and making hand movements with the robot. In this case, we are merging the virtual world and the physical world. The planning process which used to be in a virtual world now becomes an exploration process in the physical world, defining a control process to achieve a semantic grasp specified in a predefined example grasp, making this planning algorithm more like a control algorithm. Currently, the refinement step in our method consists of 1) planning a sequence of stable grasps using a stochastic grasp planner and 2) sorting planned grasps based on their similarities to predefined semantic grasps. However, stochastic planning may not be the ideal solution. It can take more time than necessary to find an appropriate grasp. One potential alternative approach is to use local geometry information to synthesize hand adjustment as we proposed in [25]. Symmetric objects may raise challenges for our matching method which estimates the approach direction of the hand since multiple views of a symmetric object could have the same depth images. We believe that by utilizing more sophisticated localization methods this problem could be alleviated. In our work, we do not consider the kinematic feasibility of a grasp. For example, a planned semantic grasp may not be kinematically feasible in a real environment due to collisions or other workspace constraints. This could be solved by using collision checking to filter out infeasible grasps after a number of good semantic grasps are produced or utilizing algorithms such as in [26] to achieve the required pre-grasp pose of the object. For the next step, we will be considering possible ways to generalize the semantic affordance map so that it would be easier to transfer grasping knowledge between objects and tasks while preserving their semantic affordance. In our current approach, a semantic affordance map is associated with a specific class of objects and it requires similarities between objects. This, to some extent, limits the application of our approach, especially in an environment which has many different classes of objects that are frequently changing over time. We believe that, in these situations, a more generic representation of semantic affordance map could help. VIII. ACKNOWLEDGEMENTS The authors would like to thank Jonathan Weisz and Lixing Dong in the pursuit of this work. REFERENCES [1] M. T. Ciocarlie and P. K. Allen, Hand Posture Subspaces for Dexterous Robotic ing, The International Journal of Robotics Research, vol. 28, no. 7, pp , [2] A. Saxena, J. Driemeyer, J. Kearns, and A. Y. Ng, Robotic grasping of novel objects, in Advances in Neural Information Processing Systems 19, pp , [3] M. Prats, P. Sanz, and A. del Pobil, Task-oriented grasping using hand preshapes and task frames, in Robotics and Automation, 2007 IEEE International Conference on, pp , april [4] M. Popovic, D. Kraft, L. Bodenhagen, E. Baseski, N. Pugeault, D. Kragic, T. Asfour, and N. Krüger, A strategy for grasping unknown objects based on co-planarity and colour information, Robotics and Autonomous Systems, vol. 58, no. 5, pp , [5] S. Geidenstam, K. Huebner, D. Banksell, and D. Kragic, Learning of 2D grasping strategies from box-based 3D object approximations, in Proceedings of Robotics: Science and Systems, June [6] R. Haschke, J. J. Steil, I. Steuwer, and H. Ritter, Task-oriented quality measures for dextrous grasping, in Proc. Conference on Computational Intelligence in Robotics and Automation, [7] A. Sahbani and S. El-Khoury, A hybrid approach for grasping 3d objects, in IROS, pp , [8] U. Castiello, The neuroscience of grasping, Nature Reviews Neuroscience, vol. 6, pp , September [9] C. Goldfeder and P. K. Allen, Data-driven grasping, Auton. Robots, vol. 31, pp. 1 20, July [10] D. Berenson and S. Srinivasa, synthesis in cluttered environments for dexterous hands, in IEEE-RAS International Conference on Humanoid Robots (Humanoids08), December [11] Z. Li and S. Sastry, Task oriented optimal grasping by multifingered robot hands, in ICRA, pp , [12] C. Rosales, L. Ros, J. M. Porta, and R. Suarez, Synthesizing Configurations with Specified Contact Regions, The International Journal of Robotics Research, July [13] L. Ying, J. Fu, and N. Pollard, Data-driven grasp synthesis using shape matching and task-based pruning, Visualization and Computer Graphics, IEEE Transactions on, vol. 13, no. 4, pp , [14] D. Song, K. Huebner, V. Kyrki, and D. Kragic, Learning task constraints for robot grasping using graphical models, in IROS, pp , [15] K. Huebner and D. Kragic, ing by parts: Robot grasp generation from 3d box primitives, in International Conference on Cognitive Systems, January [16] R. Detry, D. Kraft, A. Buch, N. Kruger, and J. Piater, Refining grasp affordance models by experience, in Robotics and Automation, 2010 IEEE International Conference on, pp , may [17] J. Aleotti and S. Caselli, Part-based robot grasp planning from human demonstration, in ICRA, pp , may [18] H. Dang and P. Allen, Robot learning of everyday object manipulations via human demonstration, in IROS, pp , oct [19] C. Ferrari and J. Canny, Planning optimal grasps, in ICRA, pp vol.3, May [20] S. Belongie, J. Malik, and J. Puzicha, Shape matching and object recognition using shape contexts, IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 24, pp , [21] A. T. Miller and P. K. Allen, it! a versatile simulator for robotic grasping, Robotics & Automation Magazine, IEEE, vol. 11, no. 4, pp , [22] M. Ciocarlie, C. Lackner, and P. Allen, Soft finger model with adaptive contact geometry for grasping and manipulation tasks, World Haptics Conference, pp , [23] C. Papazov and D. Burschka, An efficient ransac for 3d object recognition in noisy and occluded scenes, in ACCV, pp , [24] R. Diankov and J. Kuffner, Openrave: A planning architecture for autonomous robotics, Tech. Rep. CMU-RI-TR-08-34, Robotics Institute, Pittsburgh, PA, July [25] H. Dang and P. K. Allen, Tactile experience-based robotic grasping, in Workshop on Advances in Tactile Sensing and Touch based Human- Robot Interaction, HRI, March [26] L. Y. Chang, G. Zeglin, and N. Pollard, Preparatory object rotation as a human-inspired grasping strategy, in IEEE-RAS International Conference on Humanoid Robots, pp , December 2008.
Object Purpose Based Grasping
 Object Purpose Based Grasping Song Cao, Jijie Zhao Abstract Objects often have multiple purposes, and the way humans grasp a certain object may vary based on the different intended purposes. To enable
Object Purpose Based Grasping Song Cao, Jijie Zhao Abstract Objects often have multiple purposes, and the way humans grasp a certain object may vary based on the different intended purposes. To enable
arxiv: v1 [cs.ro] 11 Jul 2016
![arxiv: v1 [cs.ro] 11 Jul 2016](/thumbs/76/73190720.jpg "arxiv: v1 [cs.ro] 11 Jul 2016") Initial Experiments on Learning-Based Randomized Bin-Picking Allowing Finger Contact with Neighboring Objects Kensuke Harada, Weiwei Wan, Tokuo Tsuji, Kohei Kikuchi, Kazuyuki Nagata, and Hiromu Onda arxiv:1607.02867v1
Initial Experiments on Learning-Based Randomized Bin-Picking Allowing Finger Contact with Neighboring Objects Kensuke Harada, Weiwei Wan, Tokuo Tsuji, Kohei Kikuchi, Kazuyuki Nagata, and Hiromu Onda arxiv:1607.02867v1
Robot Learning of Everyday Object Manipulations via Human Demonstration
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Robot Learning of Everyday Object Manipulations via Human Demonstration Hao Dang and Peter
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Robot Learning of Everyday Object Manipulations via Human Demonstration Hao Dang and Peter
GRASP PLANNING UNDER TASK-SPECIFIC CONTACT CONSTRAINTS
 PH.D. DISSERTATION GRASP PLANNING UNDER TASK-SPECIFIC CONTACT CONSTRAINTS PH.D. CANDIDATE: CARLOS J. ROSALES GALLEGOS SUPERVISORS: LLUÍS ROS AND RAÚL SUÁREZ JANUARY 2013 ROBOTIC GRASPING AND MANIPULATION
PH.D. DISSERTATION GRASP PLANNING UNDER TASK-SPECIFIC CONTACT CONSTRAINTS PH.D. CANDIDATE: CARLOS J. ROSALES GALLEGOS SUPERVISORS: LLUÍS ROS AND RAÚL SUÁREZ JANUARY 2013 ROBOTIC GRASPING AND MANIPULATION
Automatic Grasp Planning Using Shape Primitives
 Automatic Grasp Planning Using Shape Primitives Andrew T. Miller Steffen Knoop Henrik I. Christensen Peter K. Allen Dept. of Computer Science, Columbia University, New York, NY IAIM, University of Karlsruhe,
Automatic Grasp Planning Using Shape Primitives Andrew T. Miller Steffen Knoop Henrik I. Christensen Peter K. Allen Dept. of Computer Science, Columbia University, New York, NY IAIM, University of Karlsruhe,
A Framework for Compliant Physical Interaction based on Multisensor Information
 A Framework for Compliant Physical Interaction based on Multisensor Information Mario Prats, Pedro J. Sanz and Angel P. del Pobil Abstract Dependable robotic manipulation of everyday objects and execution
A Framework for Compliant Physical Interaction based on Multisensor Information Mario Prats, Pedro J. Sanz and Angel P. del Pobil Abstract Dependable robotic manipulation of everyday objects and execution
Learning End-Effector Orientations for Novel Object Grasping Tasks
 Learning End-Effector Orientations for Novel Object Grasping Tasks Benjamin Balaguer Stefano Carpin Abstract We present a new method to calculate valid endeffector orientations for grasping tasks. A three-layered
Learning End-Effector Orientations for Novel Object Grasping Tasks Benjamin Balaguer Stefano Carpin Abstract We present a new method to calculate valid endeffector orientations for grasping tasks. A three-layered
Humanoid Manipulation
 Humanoid Manipulation Tamim Asfour Institute for Anthropomatics, Computer Science Department, Humanoids and Intelligence Systems Lab (Prof. Dillmann) wwwiaim.ira.uka.de www.sfb588.uni-karlsruhe.de KIT
Humanoid Manipulation Tamim Asfour Institute for Anthropomatics, Computer Science Department, Humanoids and Intelligence Systems Lab (Prof. Dillmann) wwwiaim.ira.uka.de www.sfb588.uni-karlsruhe.de KIT
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Robotic Grasping Based on Efficient Tracking and Visual Servoing using Local Feature Descriptors
 INTERNATIONAL JOURNAL OF PRECISION ENGINEERING AND MANUFACTURING Vol. 13, No. 3, pp. 387-393 MARCH 2012 / 387 DOI: 10.1007/s12541-012-0049-8 Robotic Grasping Based on Efficient Tracking and Visual Servoing
INTERNATIONAL JOURNAL OF PRECISION ENGINEERING AND MANUFACTURING Vol. 13, No. 3, pp. 387-393 MARCH 2012 / 387 DOI: 10.1007/s12541-012-0049-8 Robotic Grasping Based on Efficient Tracking and Visual Servoing
Bimanual Grasp Planning
 Bimanual Grasp Planning Nikolaus Vahrenkamp, Markus Przybylski, Tamim Asfour and Rüdiger Dillmann Institute for Anthropomatics Karlsruhe Institute of Technology (KIT) Adenauerring 2, 76131 Karlsruhe, Germany
Bimanual Grasp Planning Nikolaus Vahrenkamp, Markus Przybylski, Tamim Asfour and Rüdiger Dillmann Institute for Anthropomatics Karlsruhe Institute of Technology (KIT) Adenauerring 2, 76131 Karlsruhe, Germany
Integration of Visual Cues for Robotic Grasping
 Integration of Visual Cues for Robotic Grasping Niklas Bergström, Jeannette Bohg, and Danica Kragic Computer Vision and Active Vision Laboratory, Centre for Autonomous System, Royal Institute of Technology,
Integration of Visual Cues for Robotic Grasping Niklas Bergström, Jeannette Bohg, and Danica Kragic Computer Vision and Active Vision Laboratory, Centre for Autonomous System, Royal Institute of Technology,
Physically-based Grasp Quality Evaluation under Pose Uncertainty
 IEEE TRANSACTIONS ON ROBOTICS (ACCEPTED, PREPRINT) 1 Physically-based Grasp Quality Evaluation under Pose Uncertainty Junggon Kim, Kunihiro Iwamoto, James J. Kuffner, Yasuhiro Ota and Nancy S. Pollard
IEEE TRANSACTIONS ON ROBOTICS (ACCEPTED, PREPRINT) 1 Physically-based Grasp Quality Evaluation under Pose Uncertainty Junggon Kim, Kunihiro Iwamoto, James J. Kuffner, Yasuhiro Ota and Nancy S. Pollard
Visual Collision Detection for Corrective Movements during Grasping on a Humanoid Robot
 Visual Collision Detection for Corrective Movements during Grasping on a Humanoid Robot David Schiebener, Nikolaus Vahrenkamp and Tamim Asfour Abstract We present an approach for visually detecting collisions
Visual Collision Detection for Corrective Movements during Grasping on a Humanoid Robot David Schiebener, Nikolaus Vahrenkamp and Tamim Asfour Abstract We present an approach for visually detecting collisions
Grasping with Application to an Autonomous Checkout Robot
 Grasping with Application to an Autonomous Checkout Robot Ellen Klingbeil, Deepak Rao, Blake Carpenter, Varun Ganapathi, Andrew Y. Ng, Oussama Khatib Abstract In this paper, we present a novel grasp selection
Grasping with Application to an Autonomous Checkout Robot Ellen Klingbeil, Deepak Rao, Blake Carpenter, Varun Ganapathi, Andrew Y. Ng, Oussama Khatib Abstract In this paper, we present a novel grasp selection
Evaluating the Efficacy of Grasp Metrics for Utilization in a Gaussian Process-Based Grasp Predictor
 Evaluating the Efficacy of Grasp Metrics for Utilization in a Gaussian Process-Based Grasp Predictor Alex K. Goins 1, Ryan Carpenter 1, Weng-Keen Wong 2, and Ravi Balasubramanian 1 Abstract With the goal
Evaluating the Efficacy of Grasp Metrics for Utilization in a Gaussian Process-Based Grasp Predictor Alex K. Goins 1, Ryan Carpenter 1, Weng-Keen Wong 2, and Ravi Balasubramanian 1 Abstract With the goal
Virtual Interaction System Based on Optical Capture
 Sensors & Transducers 203 by IFSA http://www.sensorsportal.com Virtual Interaction System Based on Optical Capture Peng CHEN, 2 Xiaoyang ZHOU, 3 Jianguang LI, Peijun WANG School of Mechanical Engineering,
Sensors & Transducers 203 by IFSA http://www.sensorsportal.com Virtual Interaction System Based on Optical Capture Peng CHEN, 2 Xiaoyang ZHOU, 3 Jianguang LI, Peijun WANG School of Mechanical Engineering,
Selection of Robot Pre-Grasps using Box-Based Shape Approximation
 Selection of Robot Pre-Grasps using Box-Based Shape Approximation Kai Huebner and Danica Kragic Abstract Grasping is a central issue of various robot applications, especially when unknown objects have
Selection of Robot Pre-Grasps using Box-Based Shape Approximation Kai Huebner and Danica Kragic Abstract Grasping is a central issue of various robot applications, especially when unknown objects have
Learning End-Effector Orientations for Novel Object Grasping Tasks
 Learning End-Effector Orientations for Novel Object Grasping Tasks Benjamin Balaguer Stefano Carpin Abstract We present a new method to calculate valid endeffector orientations for grasping tasks. A fast
Learning End-Effector Orientations for Novel Object Grasping Tasks Benjamin Balaguer Stefano Carpin Abstract We present a new method to calculate valid endeffector orientations for grasping tasks. A fast
OpenMRH: a Modular Robotic Hand Model Generator Plugin for OpenRAVE
 : a Modular Robotic Hand Model Generator Plugin for OpenRAVE F. Sanfilippo 1 and K. Y. Pettersen 2 1 Department of Maritime Technology and Operations, Aalesund University College, Postboks 1517, 6025 Aalesund,
: a Modular Robotic Hand Model Generator Plugin for OpenRAVE F. Sanfilippo 1 and K. Y. Pettersen 2 1 Department of Maritime Technology and Operations, Aalesund University College, Postboks 1517, 6025 Aalesund,
Dexterous Manipulation Planning Using Probabilistic Roadmaps in Continuous Grasp Subspaces
 Dexterous Manipulation Planning Using Probabilistic Roadmaps in Continuous Grasp Subspaces Jean-Philippe Saut, Anis Sahbani, Sahar El-Khoury and Véronique Perdereau Université Pierre et Marie Curie-Paris6,
Dexterous Manipulation Planning Using Probabilistic Roadmaps in Continuous Grasp Subspaces Jean-Philippe Saut, Anis Sahbani, Sahar El-Khoury and Véronique Perdereau Université Pierre et Marie Curie-Paris6,
An Overview of 3D Object Grasp Synthesis Algorithms
 An Overview of 3D Object Grasp Synthesis Algorithms A. Sahbani a,b, S. El-Khoury c, P. Bidaud a,b a UPMC Univ Paris 06, UMR 7222, ISIR, F-75005, Paris, France b CNRS, UMR 7222, ISIR, F-75005, Paris, France
An Overview of 3D Object Grasp Synthesis Algorithms A. Sahbani a,b, S. El-Khoury c, P. Bidaud a,b a UPMC Univ Paris 06, UMR 7222, ISIR, F-75005, Paris, France b CNRS, UMR 7222, ISIR, F-75005, Paris, France
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
Robot Vision Control of robot motion from video. M. Jagersand
 Robot Vision Control of robot motion from video M. Jagersand Vision-Based Control (Visual Servoing) Initial Image User Desired Image Vision-Based Control (Visual Servoing) : Current Image Features : Desired
Robot Vision Control of robot motion from video M. Jagersand Vision-Based Control (Visual Servoing) Initial Image User Desired Image Vision-Based Control (Visual Servoing) : Current Image Features : Desired
VisGraB: A Benchmark for Vision-Based Grasping
 VisGraB: A Benchmark for Vision-Based Grasping Gert Kootstra, Mila Popović 2, Jimmy Alison Jørgensen 3, Danica Kragic, Henrik Gordon Petersen 3, and Norbert Krüger 2 Computer Vision and Active Perception
VisGraB: A Benchmark for Vision-Based Grasping Gert Kootstra, Mila Popović 2, Jimmy Alison Jørgensen 3, Danica Kragic, Henrik Gordon Petersen 3, and Norbert Krüger 2 Computer Vision and Active Perception
Semantic RGB-D Perception for Cognitive Robots
 Semantic RGB-D Perception for Cognitive Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Domestic Service Robots Dynamaid Cosero Size: 100-180 cm, weight: 30-35 kg 36
Semantic RGB-D Perception for Cognitive Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Domestic Service Robots Dynamaid Cosero Size: 100-180 cm, weight: 30-35 kg 36
arxiv: v1 [cs.ro] 23 May 2018
![arxiv: v1 [cs.ro] 23 May 2018](/thumbs/87/95584176.jpg "arxiv: v1 [cs.ro] 23 May 2018") Tool Exchangeable Grasp/Assembly Planner Kensuke Harada 1,2, Kento Nakayama 1, Weiwei Wan 1,2, Kazuyuki Nagata 2 Natsuki Yamanobe 2, and Ixchel G. Ramirez-Alpizar 1 arxiv:1805.08962v1 [cs.ro] 23 May 2018
Tool Exchangeable Grasp/Assembly Planner Kensuke Harada 1,2, Kento Nakayama 1, Weiwei Wan 1,2, Kazuyuki Nagata 2 Natsuki Yamanobe 2, and Ixchel G. Ramirez-Alpizar 1 arxiv:1805.08962v1 [cs.ro] 23 May 2018
Representation of Pre-Grasp Strategies for Object Manipulation
 Representation of Pre-Grasp Strategies for Object Manipulation Daniel Kappler, Lillian Chang, Markus Przybylski, Nancy Pollard, Tamim Asfour, and Rüdiger Dillmann Institute for Anthropomatics, Karlsruhe
Representation of Pre-Grasp Strategies for Object Manipulation Daniel Kappler, Lillian Chang, Markus Przybylski, Nancy Pollard, Tamim Asfour, and Rüdiger Dillmann Institute for Anthropomatics, Karlsruhe
Pick and Place Planning for Dual-Arm Manipulators
 Pick and Place Planning for Dual-Arm Manipulators Kensuke Harada, Torea Foissotte, Tokuo Tsuji, Kazuyuki Nagata, Natsuki Yamanobe, Akira Nakamura, and Yoshihiro Kawai Abstract This paper proposes a method
Pick and Place Planning for Dual-Arm Manipulators Kensuke Harada, Torea Foissotte, Tokuo Tsuji, Kazuyuki Nagata, Natsuki Yamanobe, Akira Nakamura, and Yoshihiro Kawai Abstract This paper proposes a method
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,700 108,500 1.7 M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,700 108,500 1.7 M Open access books available International authors and editors Downloads Our
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Generating and Learning from 3D Models of Objects through Interactions. by Kiana Alcala, Kathryn Baldauf, Aylish Wrench
 Generating and Learning from 3D Models of Objects through Interactions by Kiana Alcala, Kathryn Baldauf, Aylish Wrench Abstract For our project, we plan to implement code on the robotic arm that will allow
Generating and Learning from 3D Models of Objects through Interactions by Kiana Alcala, Kathryn Baldauf, Aylish Wrench Abstract For our project, we plan to implement code on the robotic arm that will allow
Integrating Grasp Planning and Visual Feedback for Reliable Manipulation
 9th IEEE-RAS International Conference on Humanoid Robots December 7-0, 2009 Paris, France Integrating Grasp Planning and Visual Feedback for Reliable Manipulation Rosen Diankov Takeo Kanade James Kuffner
9th IEEE-RAS International Conference on Humanoid Robots December 7-0, 2009 Paris, France Integrating Grasp Planning and Visual Feedback for Reliable Manipulation Rosen Diankov Takeo Kanade James Kuffner
Part-based Grasp Planning for Familiar Objects
 Part-based Grasp Planning for Familiar Objects Nikolaus Vahrenkamp 1, Leonard Westkamp 1, Natsuki Yamanobe 2, Eren E. Aksoy 1, and Tamim Asfour 1 Abstract In this work, we present a part-based grasp planning
Part-based Grasp Planning for Familiar Objects Nikolaus Vahrenkamp 1, Leonard Westkamp 1, Natsuki Yamanobe 2, Eren E. Aksoy 1, and Tamim Asfour 1 Abstract In this work, we present a part-based grasp planning
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Robot grasp planning based on demonstrated grasp strategies
 Article Robot grasp planning based on demonstrated grasp strategies The International Journal of Robotics Research 215, Vol. 34(1) 26 42 Ó The Author(s) 214 Reprints and permissions: sagepub.co.uk/journalspermissions.nav
Article Robot grasp planning based on demonstrated grasp strategies The International Journal of Robotics Research 215, Vol. 34(1) 26 42 Ó The Author(s) 214 Reprints and permissions: sagepub.co.uk/journalspermissions.nav
Robotics and Autonomous Systems
 Robotics and Autonomous Systems ( ) Contents lists available at SciVerse ScienceDirect Robotics and Autonomous Systems journal homepage: www.elsevier.com/locate/robot An overview of 3D object grasp synthesis
Robotics and Autonomous Systems ( ) Contents lists available at SciVerse ScienceDirect Robotics and Autonomous Systems journal homepage: www.elsevier.com/locate/robot An overview of 3D object grasp synthesis
Grasp Planning Using Low Dimensional Subspaces
 1 Grasp Planning Using Low Dimensional Subspaces Peter K. Allen, Matei Ciocarlie and Corey Goldfeder I. INTRODUCTION In this chapter we explore the concept of low-dimensional posture subspaces for artificial
1 Grasp Planning Using Low Dimensional Subspaces Peter K. Allen, Matei Ciocarlie and Corey Goldfeder I. INTRODUCTION In this chapter we explore the concept of low-dimensional posture subspaces for artificial
Final Project Report: Mobile Pick and Place
 Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
Final Project Report: Mobile Pick and Place Xiaoyang Liu (xiaoyan1) Juncheng Zhang (junchen1) Karthik Ramachandran (kramacha) Sumit Saxena (sumits1) Yihao Qian (yihaoq) Adviser: Dr Matthew Travers Carnegie
The Crucial Components to Solve the Picking Problem
 B. Scholz Common Approaches to the Picking Problem 1 / 31 MIN Faculty Department of Informatics The Crucial Components to Solve the Picking Problem Benjamin Scholz University of Hamburg Faculty of Mathematics,
B. Scholz Common Approaches to the Picking Problem 1 / 31 MIN Faculty Department of Informatics The Crucial Components to Solve the Picking Problem Benjamin Scholz University of Hamburg Faculty of Mathematics,
Task-based Robotic Grasp Planning
 University of South Florida Scholar Commons Graduate Theses and Dissertations Graduate School 1-1-2014 Task-based Robotic Grasp Planning Yun Lin University of South Florida, gtlinyun@gmail.com Follow this
University of South Florida Scholar Commons Graduate Theses and Dissertations Graduate School 1-1-2014 Task-based Robotic Grasp Planning Yun Lin University of South Florida, gtlinyun@gmail.com Follow this
A framework for visual servoing
 A framework for visual servoing Danica Kragic and Henrik I Christensen Centre for Autonomous Systems, Royal Institute of Technology, S-10044 Stockholm, Sweden, danik,hic @nada.kth.se http://www.nada.kth.se/
A framework for visual servoing Danica Kragic and Henrik I Christensen Centre for Autonomous Systems, Royal Institute of Technology, S-10044 Stockholm, Sweden, danik,hic @nada.kth.se http://www.nada.kth.se/
Grasp Planning with Soft Hands using Bounding Box Object Decomposition
 Grasp Planning with Soft Hands using Bounding Box Object Decomposition M. Bonilla 1, D. Resasco 1, M. Gabiccini 1,2,3 and A. Bicchi 1,2 Abstract In this paper, we present a method to plan grasps for soft
Grasp Planning with Soft Hands using Bounding Box Object Decomposition M. Bonilla 1, D. Resasco 1, M. Gabiccini 1,2,3 and A. Bicchi 1,2 Abstract In this paper, we present a method to plan grasps for soft
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Editorial Manager(tm) for International Journal of. Title: A Minimalist Approach to 3D Visually-Guided Grasping for Service Robots
 for International Journal of. Title: A Minimalist Approach to 3D Visually-Guided Grasping for Service Robots") Computer Vision Editorial Manager(tm) for International Journal of Manuscript Draft Manuscript Number: Title: A Minimalist Approach to 3D Visually-Guided Grasping for Service Robots Article Type: Special
Computer Vision Editorial Manager(tm) for International Journal of Manuscript Draft Manuscript Number: Title: A Minimalist Approach to 3D Visually-Guided Grasping for Service Robots Article Type: Special
Collaborative Grasp Planning with Multiple Object Representations
 Collaborative Grasp Planning with Multiple Object Representations Peter Brook, Matei Ciocarlie and Kaijen Hsiao Abstract Grasp planning based on perceived sensor data of an object can be performed in different
Collaborative Grasp Planning with Multiple Object Representations Peter Brook, Matei Ciocarlie and Kaijen Hsiao Abstract Grasp planning based on perceived sensor data of an object can be performed in different
Visual Perception for Robots
 Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Visual Perception for Robots Sven Behnke Computer Science Institute VI Autonomous Intelligent Systems Our Cognitive Robots Complete systems for example scenarios Equipped with rich sensors Flying robot
Object re-grasping with Dexterous Robotic Hands
 1 Object re-grasping with Dexterous Robotic Hands Ana Carolina Grilo da Silva Januário Instituto Superior Técnico, Lisboa, Portugal Email: ana.januario@tecnico.ulisboa.pt Abstract This thesis addresses
1 Object re-grasping with Dexterous Robotic Hands Ana Carolina Grilo da Silva Januário Instituto Superior Técnico, Lisboa, Portugal Email: ana.januario@tecnico.ulisboa.pt Abstract This thesis addresses
Manipulator and Object Tracking for In Hand Model Acquisition
 Manipulator and Object Tracking for In Hand Model Acquisition Michael Krainin, Peter Henry, Xiaofeng Ren, and Dieter Fox Abstract Recognizing and manipulating objects is an important task for mobile robots
Manipulator and Object Tracking for In Hand Model Acquisition Michael Krainin, Peter Henry, Xiaofeng Ren, and Dieter Fox Abstract Recognizing and manipulating objects is an important task for mobile robots
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
Workspace Aware Online Grasp Planning
 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Madrid, Spain, October 1-5, 2018 Workspace Aware Online Grasp Planning Iretiayo Akinola, Jacob Varley, Boyuan Chen, and Peter
2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Madrid, Spain, October 1-5, 2018 Workspace Aware Online Grasp Planning Iretiayo Akinola, Jacob Varley, Boyuan Chen, and Peter
Task-based Grasp Adaptation on a Humanoid Robot
 Task-based Grasp Adaptation on a Humanoid Robot Jeannette Bohg Kai Welke Beatriz León Martin Do Dan Song Walter Wohlkinger Marianna Madry Aitor Aldóma Markus Przybylski Tamim Asfour Higinio Martí Danica
Task-based Grasp Adaptation on a Humanoid Robot Jeannette Bohg Kai Welke Beatriz León Martin Do Dan Song Walter Wohlkinger Marianna Madry Aitor Aldóma Markus Przybylski Tamim Asfour Higinio Martí Danica
Keywords: clustering, construction, machine vision
 CS4758: Robot Construction Worker Alycia Gailey, biomedical engineering, graduate student: asg47@cornell.edu Alex Slover, computer science, junior: ais46@cornell.edu Abstract: Progress has been made in
CS4758: Robot Construction Worker Alycia Gailey, biomedical engineering, graduate student: asg47@cornell.edu Alex Slover, computer science, junior: ais46@cornell.edu Abstract: Progress has been made in
Workspace Analysis for Planning Human-Robot Interaction Tasks
 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids) Cancun, Mexico, Nov 15-17, 2016 Workspace Analysis for Planning Human-Robot Interaction Tasks Nikolaus Vahrenkamp 1, Harry Arnst
2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids) Cancun, Mexico, Nov 15-17, 2016 Workspace Analysis for Planning Human-Robot Interaction Tasks Nikolaus Vahrenkamp 1, Harry Arnst
Robo-Librarian: Sliding-Grasping Task
 Robo-Librarian: Sliding-Grasping Task Adao Henrique Ribeiro Justo Filho, Rei Suzuki Abstract Picking up objects from a flat surface is quite cumbersome task for a robot to perform. We explore a simple
Robo-Librarian: Sliding-Grasping Task Adao Henrique Ribeiro Justo Filho, Rei Suzuki Abstract Picking up objects from a flat surface is quite cumbersome task for a robot to perform. We explore a simple
Planning pre-grasp manipulation for transport tasks
 21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA Planning pre-grasp manipulation for transport tasks Lillian Y. Chang Siddhartha
21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA Planning pre-grasp manipulation for transport tasks Lillian Y. Chang Siddhartha
Learning of Grasp Selection based on Shape-Templates
 Learning of Grasp Selection based on Shape-Templates Alexander Herzog 1 Peter Pastor 2 Mrinal Kalakrishnan 2 Ludovic Righetti 1,2 Jeannette Bohg 1 Tamim Asfour 3 Stefan Schaal 1,2 Abstract The ability
Learning of Grasp Selection based on Shape-Templates Alexander Herzog 1 Peter Pastor 2 Mrinal Kalakrishnan 2 Ludovic Righetti 1,2 Jeannette Bohg 1 Tamim Asfour 3 Stefan Schaal 1,2 Abstract The ability
ArchGenTool: A System-Independent Collaborative Tool for Robotic Architecture Design
 ArchGenTool: A System-Independent Collaborative Tool for Robotic Architecture Design Emanuele Ruffaldi (SSSA) I. Kostavelis, D. Giakoumis, D. Tzovaras (CERTH) Overview Problem Statement Existing Solutions
ArchGenTool: A System-Independent Collaborative Tool for Robotic Architecture Design Emanuele Ruffaldi (SSSA) I. Kostavelis, D. Giakoumis, D. Tzovaras (CERTH) Overview Problem Statement Existing Solutions
A Sensor-based Approach for Physical Interaction Based on Hand, Grasp and Task Frames
 A Sensor-based Approach for Physical Interaction Based on Hand, Grasp and Task Frames Mario Prats, Pedro J. Sanz and Angel P. del Pobil Robotic Intelligence Lab Jaume-I University, Castellón, Spain. Email:
A Sensor-based Approach for Physical Interaction Based on Hand, Grasp and Task Frames Mario Prats, Pedro J. Sanz and Angel P. del Pobil Robotic Intelligence Lab Jaume-I University, Castellón, Spain. Email:
Bimanual Compliant Tactile Exploration for Grasping Unknown Objects
 Bimanual Compliant Tactile Exploration for Grasping Unknown Objects Nicolas Sommer, Miao Li and Aude Billard Ecole Polytechnique Federale de Lausanne (EPFL) {n.sommer, miao.li, aude.billard}@epfl.ch Abstract
Bimanual Compliant Tactile Exploration for Grasping Unknown Objects Nicolas Sommer, Miao Li and Aude Billard Ecole Polytechnique Federale de Lausanne (EPFL) {n.sommer, miao.li, aude.billard}@epfl.ch Abstract
Visual Servoing for Floppy Robots Using LWPR
 Visual Servoing for Floppy Robots Using LWPR Fredrik Larsson Erik Jonsson Michael Felsberg Abstract We have combined inverse kinematics learned by LWPR with visual servoing to correct for inaccuracies
Visual Servoing for Floppy Robots Using LWPR Fredrik Larsson Erik Jonsson Michael Felsberg Abstract We have combined inverse kinematics learned by LWPR with visual servoing to correct for inaccuracies
International Journal of Advanced Research in Computer Science and Software Engineering
 Volume 2, Issue 10, October 2012 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Force Closure
Volume 2, Issue 10, October 2012 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Force Closure
Measuring Contact Points from Displacements with a Compliant, Articulated Robot Hand
 Measuring Contact Points from Displacements with a Compliant, Articulated Robot Hand Gurdayal S. Koonjul, Garth J. Zeglin, and Nancy S. Pollard The Robotics Institute, Carnegie Mellon University, Pittsburgh,
Measuring Contact Points from Displacements with a Compliant, Articulated Robot Hand Gurdayal S. Koonjul, Garth J. Zeglin, and Nancy S. Pollard The Robotics Institute, Carnegie Mellon University, Pittsburgh,
Dynamic Time Warping for Binocular Hand Tracking and Reconstruction
 Dynamic Time Warping for Binocular Hand Tracking and Reconstruction Javier Romero, Danica Kragic Ville Kyrki Antonis Argyros CAS-CVAP-CSC Dept. of Information Technology Institute of Computer Science KTH,
Dynamic Time Warping for Binocular Hand Tracking and Reconstruction Javier Romero, Danica Kragic Ville Kyrki Antonis Argyros CAS-CVAP-CSC Dept. of Information Technology Institute of Computer Science KTH,
Constraint-Based Task Programming with CAD Semantics: From Intuitive Specification to Real-Time Control
 Constraint-Based Task Programming with CAD Semantics: From Intuitive Specification to Real-Time Control Nikhil Somani, Andre Gaschler, Markus Rickert, Alexander Perzylo, and Alois Knoll Abstract In this
Constraint-Based Task Programming with CAD Semantics: From Intuitive Specification to Real-Time Control Nikhil Somani, Andre Gaschler, Markus Rickert, Alexander Perzylo, and Alois Knoll Abstract In this
Simox: A Robotics Toolbox for Simulation, Motion and Grasp Planning
 Simox: A Robotics Toolbox for Simulation, Motion and Grasp Planning N. Vahrenkamp a,b, M. Kröhnert a, S. Ulbrich a, T. Asfour a, G. Metta b, R. Dillmann a, and G. Sandini b Abstract Simox is a C++ robotics
Simox: A Robotics Toolbox for Simulation, Motion and Grasp Planning N. Vahrenkamp a,b, M. Kröhnert a, S. Ulbrich a, T. Asfour a, G. Metta b, R. Dillmann a, and G. Sandini b Abstract Simox is a C++ robotics
Grasp Affordances from Multi-Fingered Tactile Exploration using Dynamic Potential Fields
 Grasp Affordances from Multi-Fingered Tactile Exploration using Dynamic Potential Fields Alexander Bierbaum, Matthias Rambow, Tamim Asfour and Rüdiger Dillmann Institute for Anthropomatics University of
Grasp Affordances from Multi-Fingered Tactile Exploration using Dynamic Potential Fields Alexander Bierbaum, Matthias Rambow, Tamim Asfour and Rüdiger Dillmann Institute for Anthropomatics University of
Learning Objects and Grasp Affordances through Autonomous Exploration
 Learning Objects and Grasp Affordances through Autonomous Exploration Dirk Kraft 1, Renaud Detry 2, Nicolas Pugeault 1, Emre Başeski 1, Justus Piater 2, and Norbert Krüger 1 1 University of Southern Denmark,
Learning Objects and Grasp Affordances through Autonomous Exploration Dirk Kraft 1, Renaud Detry 2, Nicolas Pugeault 1, Emre Başeski 1, Justus Piater 2, and Norbert Krüger 1 1 University of Southern Denmark,
An Interactive Technique for Robot Control by Using Image Processing Method
 An Interactive Technique for Robot Control by Using Image Processing Method Mr. Raskar D. S 1., Prof. Mrs. Belagali P. P 2 1, E&TC Dept. Dr. JJMCOE., Jaysingpur. Maharashtra., India. 2 Associate Prof.
An Interactive Technique for Robot Control by Using Image Processing Method Mr. Raskar D. S 1., Prof. Mrs. Belagali P. P 2 1, E&TC Dept. Dr. JJMCOE., Jaysingpur. Maharashtra., India. 2 Associate Prof.
DETC APPROXIMATE MOTION SYNTHESIS OF SPHERICAL KINEMATIC CHAINS
 Proceedings of the ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2007 September 4-7, 2007, Las Vegas, Nevada, USA DETC2007-34372
Proceedings of the ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2007 September 4-7, 2007, Las Vegas, Nevada, USA DETC2007-34372
Electric Field Servoing for Robotic Manipulation
 Electric Field Servoing for Robotic Manipulation Ryan Wistort, Joshua R. Smith Abstract This paper presents two experiments with Electric Field Servoing for robotic manipulation. In the first, a robot
Electric Field Servoing for Robotic Manipulation Ryan Wistort, Joshua R. Smith Abstract This paper presents two experiments with Electric Field Servoing for robotic manipulation. In the first, a robot
Towards Planning Human-Robot Interactive Manipulation Tasks:
 The Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics Roma, Italy. June 24-27, 2012 Towards Planning Human-Robot Interactive Manipulation Tasks: Task Dependent and
The Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics Roma, Italy. June 24-27, 2012 Towards Planning Human-Robot Interactive Manipulation Tasks: Task Dependent and
Motion Planning for 3D Multifingered Caging with Object Recognition using AR Picture Markers
 Motion Planning for 3D Multifingered Caging with Object Recognition using AR Picture Markers Satoshi Makita, Kensuke Okita and Yusuke Maeda Abstract Caging is a method to capture an object geometrically
Motion Planning for 3D Multifingered Caging with Object Recognition using AR Picture Markers Satoshi Makita, Kensuke Okita and Yusuke Maeda Abstract Caging is a method to capture an object geometrically
Guided Pushing for Object Singulation
 Guided Pushing for Object Singulation Tucker Hermans James M. Rehg Aaron Bobick Abstract We propose a novel method for a robot to separate and segment objects in a cluttered tabletop environment. The method
Guided Pushing for Object Singulation Tucker Hermans James M. Rehg Aaron Bobick Abstract We propose a novel method for a robot to separate and segment objects in a cluttered tabletop environment. The method
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Learning from Successes and Failures to Grasp Objects with a Vacuum Gripper
 Learning from Successes and Failures to Grasp Objects with a Vacuum Gripper Luca Monorchio, Daniele Evangelista, Marco Imperoli, and Alberto Pretto Abstract In this work we present an empirical approach
Learning from Successes and Failures to Grasp Objects with a Vacuum Gripper Luca Monorchio, Daniele Evangelista, Marco Imperoli, and Alberto Pretto Abstract In this work we present an empirical approach
Combining Motion Planning and Task Assignment for a Dual-arm System
 Combining Motion Planning and Task Assignment for a Dual-arm System Carlos Rodríguez and Raúl Suárez Abstract This paper deals with the problem of combining motion and task assignment for a dual-arm robotic
Combining Motion Planning and Task Assignment for a Dual-arm System Carlos Rodríguez and Raúl Suárez Abstract This paper deals with the problem of combining motion and task assignment for a dual-arm robotic
Exploration and Imitation for the Acquisition of Object Action Complexes
 Exploration and Imitation for the Acquisition of Object Action Complexes on Humanoids Tamim Asfour, Ales Ude, Andrej Games, Damir Omrcen, Kai Welke, Alexander Bierbaum, Martin Do, Pedram Azad, and Rüdiger
Exploration and Imitation for the Acquisition of Object Action Complexes on Humanoids Tamim Asfour, Ales Ude, Andrej Games, Damir Omrcen, Kai Welke, Alexander Bierbaum, Martin Do, Pedram Azad, and Rüdiger
Combinatorial Optimization for Hierarchical Contact-level Grasping
 To appear in the IEEE International Conference on Robotics and Automation, 2014. This copy is for personal use only. c 2014 IEEE Prints will be available at http://ieeexplore.ieee.org shortly. Combinatorial
To appear in the IEEE International Conference on Robotics and Automation, 2014. This copy is for personal use only. c 2014 IEEE Prints will be available at http://ieeexplore.ieee.org shortly. Combinatorial
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots
 A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
Benchmarking for the Metamorphic Hand based on a. Dimensionality Reduction Model
 Benchmarking for the Metamorphic Hand based on a Dimensionality Reduction Model King s College London: Jie Sun, Ketao Zhang, Jian S. Dai KTH Royal Institute of Technology: Carl Henrik Ek, Hedvig Kjellstrom,
Benchmarking for the Metamorphic Hand based on a Dimensionality Reduction Model King s College London: Jie Sun, Ketao Zhang, Jian S. Dai KTH Royal Institute of Technology: Carl Henrik Ek, Hedvig Kjellstrom,
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS
 METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues
 2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
Examples of 3D Grasp Quality Computations
 Proceedings of the 1999 EEE International Conference on Robotics & Automation Detroit, Michigan May 1999 Examples of 3D Grasp Quality Computations Andrew T. Miller Peter K. Allen Department of Computer
Proceedings of the 1999 EEE International Conference on Robotics & Automation Detroit, Michigan May 1999 Examples of 3D Grasp Quality Computations Andrew T. Miller Peter K. Allen Department of Computer
Skill. Robot/ Controller
 Skill Acquisition from Human Demonstration Using a Hidden Markov Model G. E. Hovland, P. Sikka and B. J. McCarragher Department of Engineering Faculty of Engineering and Information Technology The Australian
Skill Acquisition from Human Demonstration Using a Hidden Markov Model G. E. Hovland, P. Sikka and B. J. McCarragher Department of Engineering Faculty of Engineering and Information Technology The Australian
Efficient Surface and Feature Estimation in RGBD
 Efficient Surface and Feature Estimation in RGBD Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RGB-D Workshop on 3D Perception
Efficient Surface and Feature Estimation in RGBD Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RGB-D Workshop on 3D Perception
Aspect Transition Graph: an Affordance-Based Model
 000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 Aspect Transition Graph:
000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 Aspect Transition Graph:
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION
 COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
CS 4758: Automated Semantic Mapping of Environment
 CS 4758: Automated Semantic Mapping of Environment Dongsu Lee, ECE, M.Eng., dl624@cornell.edu Aperahama Parangi, CS, 2013, alp75@cornell.edu Abstract The purpose of this project is to program an Erratic
CS 4758: Automated Semantic Mapping of Environment Dongsu Lee, ECE, M.Eng., dl624@cornell.edu Aperahama Parangi, CS, 2013, alp75@cornell.edu Abstract The purpose of this project is to program an Erratic
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Minimum Volume Bounding Box Decomposition for Shape Approximation in Robot Grasping
 2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 Minimum Volume Bounding Box Decomposition for Shape Approximation in Robot Grasping Kai Huebner, Steffen
2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 Minimum Volume Bounding Box Decomposition for Shape Approximation in Robot Grasping Kai Huebner, Steffen
Small Object Manipulation in 3D Perception Robotic Systems Using Visual Servoing
 Small Object Manipulation in 3D Perception Robotic Systems Using Visual Servoing Camilo Perez Quintero, Oscar Ramirez, Mona Gridseth and Martin Jägersand* Abstract Robot manipulation has benefited from
Small Object Manipulation in 3D Perception Robotic Systems Using Visual Servoing Camilo Perez Quintero, Oscar Ramirez, Mona Gridseth and Martin Jägersand* Abstract Robot manipulation has benefited from
Building Reliable 2D Maps from 3D Features
 Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
Assignment 3. Position of the center +/- 0.1 inches Orientation +/- 1 degree. Decal, marker Stereo, matching algorithms Pose estimation
 Assignment 3 1. You are required to analyze the feasibility of designing a vision system for the robot gas station attendant. Assume that the driver parks the car so that the flap and the cap are in a
Assignment 3 1. You are required to analyze the feasibility of designing a vision system for the robot gas station attendant. Assume that the driver parks the car so that the flap and the cap are in a
Octree-Based Obstacle Representation and Registration for Real-Time
 Octree-Based Obstacle Representation and Registration for Real-Time Jaewoong Kim, Daesik Kim, Junghyun Seo, Sukhan Lee and Yeonchool Park* Intelligent System Research Center (ISRC) & Nano and Intelligent
Octree-Based Obstacle Representation and Registration for Real-Time Jaewoong Kim, Daesik Kim, Junghyun Seo, Sukhan Lee and Yeonchool Park* Intelligent System Research Center (ISRC) & Nano and Intelligent
Optimal Segmentation and Understanding of Motion Capture Data
 Optimal Segmentation and Understanding of Motion Capture Data Xiang Huang, M.A.Sc Candidate Department of Electrical and Computer Engineering McMaster University Supervisor: Dr. Xiaolin Wu 7 Apr, 2005
Optimal Segmentation and Understanding of Motion Capture Data Xiang Huang, M.A.Sc Candidate Department of Electrical and Computer Engineering McMaster University Supervisor: Dr. Xiaolin Wu 7 Apr, 2005
Path Planning for a Robot Manipulator based on Probabilistic Roadmap and Reinforcement Learning
 674 International Journal Jung-Jun of Control, Park, Automation, Ji-Hun Kim, and and Systems, Jae-Bok vol. Song 5, no. 6, pp. 674-680, December 2007 Path Planning for a Robot Manipulator based on Probabilistic
674 International Journal Jung-Jun of Control, Park, Automation, Ji-Hun Kim, and and Systems, Jae-Bok vol. Song 5, no. 6, pp. 674-680, December 2007 Path Planning for a Robot Manipulator based on Probabilistic