Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
|
|
|
- Teresa Bryan
- 6 years ago
- Views:
Transcription

1 Professor Willia Hoff Dept of Electrical Engineering &Coputer Science 1
2 Caera Calibration 2
3 Caera Calibration Needed for ost achine vision and photograetry tasks (object recognition, pose estiation, ). Calibration eans estiating extrinsic (external) and intrinsic (internal) paraeters Extrinsic paraeters position and orientation (pose) of caera Intrinsic paraeters Focal length Pixel size Distortion coefficients Iage center In this lecture we will concentrate on finding the intrinsic paraeters 3

4 Exaple Use of Calibration Given a point in an iage, what ray eanating fro the caera center corresponds to that pixel? Or, given a 3D point in the scene, what pixel does it project to? p We know how to do this if the caera is a pinhole caera: ray x = f X/Z, y = f Y/Z By intersecting the ray with the ground plane, you can estiate the position of the point P 4
5 Calibration The use of a calibration pattern or set of arkers is one of the ore reliable ways to estiate a caera s intrinsic paraeters A planar target is often used (it is easy to ake), and you take ultiple iages at different poses You can ove the target in a controlled way (where the relative poses of the target are known) or just ove it in an uncontrolled way (where you have to solve for the poses) It is best if the calibration object spans as uch of the iage as possible The strategy is to first solve for all calibration paraeters except lens distortion by assuing there is no distortion Then perfor a final nonlinear optiization which includes solving for lens distortion 5


6 Exaple Calibration Patterns Geoetry of target is known Pose of target is not known Iages fro Sebastian Thrun 6
7 Siple Perspective Projection A 3x4 caera projection atrix M projects 3D points onto 2D iage points This atrix odels: rotation and translation focal length ratio of pixel height and width iage center 2D iage point (x,y) X u Y v M Z w 1 x u / w, y v / w 3D point in world coords It doesn t odel lens distortion M K M ext 3x3 intrinsic paraeter atrix 3x4 extrinsic paraeter atrix, contains world to caera pose 7
8 Perspective projection u v w X Y Z 1 If the target is planar, we can use Z=0 for all points on the target So equation siplifies to u v w X Y 1 This 3x3 atrix is a hoography that aps the planar target s calibration points (X, Y, 0) into iage coordinates (x,y), where x=u/w, y=v/w 8
9 Perspective projection of a plane (continued) We can solve for the 9 unknowns (11..34) by observing a set of known points on a calibration planar target, then do least squares fitting This is called the direct linear transforation (DLT) To do this, write: x u w , 31 X X 32 Y Y 34 y v w X X Y Y Then X X Y Y x y 31X 32Y 34 0 X Y
10 Direct Linear Transforation We collect all the unknowns ( ij ) into a vector (9x1), so A=0 A = 0 is a hoogeneous syste of equations You can only solve for up to an unknown scale factor The solution is the eigenvector corresponding to the zero eigenvalue of A T A You can also find this using Singular Value Decoposition (SVD) Recall that we can take the SVD of A; ie., A = U D V T And x is the colun of V corresponding to the zero singular value of A (Since the coluns are ordered, this is the rightost colun of V) We can repeat for other poses 10
11 Extracting paraeters We next extract the intrinsic and extrinsic caera paraeters fro M, where M = K M ext The intrinsic paraeters (in K) are fx, fy, cx, cy The extrinsic paraeters (in M ext ) are r11, r12,, r33, tx, ty, tz The procedure requires soe linear algebra but is fairly straightforward. It is described clearly in: Zhang, Z. (2000). A flexible new technique for caera calibration. IEEE Trans on Pattern Analysis &Machine Intel, 22(11): The final result is that we have solved for all intrinsic and extrinsic paraeters except lens distortion 11
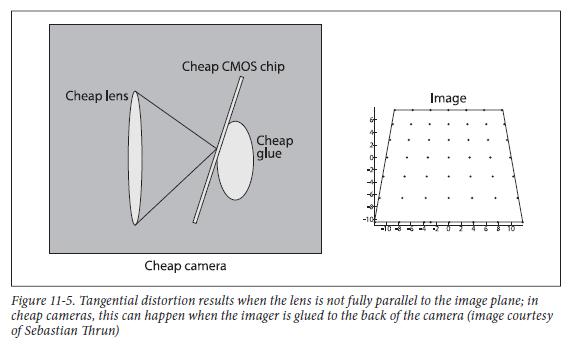
12 Lens Distortion Lens distortion - projected points do not follow the siple pinhole caera forula Most coon is barrel distortion and pin-cushion distortion Points are displaced radially inward (barrel) or outward (pincushion) fro correct position Tangential distortions are also possible There are other types of lens aberrations that we won t consider Spherical, coa, astigatis (these blur the point) Chroatic aberrations (color affects focal length) 12
 telephoto (pincushion)")

13 Radial Distortion Exaples wideangle (barrel) telephoto (pincushion) tortion/distortion.htl Iage fro Sebastian Thrun 13
14 Caera Model We use the odel of Heikkil and Silven at the University of Oulu in Finland Also in the Matlab caera calibration toolbox by Strobl, et al 1 Usual convention of x increasing left to right, y increasing top to botto the top left pixel is the origin
15 distance fro center, where r ) (1 y x r r k r k r k y x y x d d Model of Radial Distortion 15
16 dx 2k k xy k4 r 2x 2 2 r 2y 2k xy 4 Model of Tangential Distortion 16
17 17
18 Coplete Projection Model A 3D point is projected onto the iage plane (x,y) using the pinhole odel Then the point is distorted using x y Then copute pixel location x (1 y Note: f(1) and f(2) are focal lengths expressed in units of horizontal and vertical pixels. Both coponents are usually very siilar. The ratio f(2)/f(1), often called "aspect ratio", is different fro 1 if the pixels in the CCD array are not square d d 2 4 k1r k2r k5r x y p p f f 1 2 x y d d 6 ) dx cc cc 1 2 There are a total of 9 paraeters to be calibrated f1,f2, cc1, cc2, k1..k5 18
 this iniizes iage residual errors fro Heikkilä and Silvén")
19 Solving for Paraeters Typically an initial guess for pose and focal length is found, ignoring lens distortions Then non-linear optiization to find all paraeters (such as iterative least squares) this iniizes iage residual errors fro Heikkilä and Silvén 19
20 How Many Iages are Needed? Unknowns: There are 9 intrinsic paraeters 6 additional paraeters for pose of each viewpoint Given: K iages with M points each Each point yields two equations So 9+6K unknowns and 2KM equations Need 2KM > 9+6K Exaple: 3 viewpoints => 27 unknowns Need at least 5 corners per iage Of course, ore are better 20
21 Matlab Caera Calibration Toolbox See Requires anual initial picking of corners in iages Software finds pose of target in each iage; and intrinsic paraeters Can rectify entire iage This will undo lens distortion Creates an iage as if it were taken with a pinhole caera Or, use the noralize function fro the toolbox to undistort a single point 21
22 Minor fix to code If you are having eory probles, try this In file apply_distortion., coent out these lines % aa = (2*k(3)*x(2,:)+6*k(4)*x(1,:))'*ones(1,3); % bb = (2*k(3)*x(1,:)+2*k(4)*x(2,:))'*ones(1,3); % cc = (6*k(3)*x(2,:)+2*k(4)*x(1,:))'*ones(1,3); Code doesn t use these variables If you don t coent the out, it ay run out of eory on large iages 22
(Geometric) Camera Calibration
 Camera Calibration") (Geoetric) Caera Calibration CS635 Spring 217 Daniel G. Aliaga Departent of Coputer Science Purdue University Caera Calibration Caeras and CCDs Aberrations Perspective Projection Calibration Caeras First
(Geoetric) Caera Calibration CS635 Spring 217 Daniel G. Aliaga Departent of Coputer Science Purdue University Caera Calibration Caeras and CCDs Aberrations Perspective Projection Calibration Caeras First
Image Stitching. Computer Vision Jia-Bin Huang, Virginia Tech. Add example. Many slides from S. Seitz and D. Hoiem
 Iage Stitcing Add exaple Coputer Vision Jia-Bin Huang, Virginia Tec Many slides fro S. Seitz and D. Hoie Adinistrative stuffs HW 3 is out due :59 PM Oct 7 Please start early. Deadlines are fir. No eails
Iage Stitcing Add exaple Coputer Vision Jia-Bin Huang, Virginia Tec Many slides fro S. Seitz and D. Hoie Adinistrative stuffs HW 3 is out due :59 PM Oct 7 Please start early. Deadlines are fir. No eails
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Robot Vision: Camera calibration
 Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 13
 Coputer Aided Drafting, Design and Manufacturing Volue 26, uber 2, June 2016, Page 13 CADDM 3D reconstruction of coplex curved objects fro line drawings Sun Yanling, Dong Lijun Institute of Mechanical
Coputer Aided Drafting, Design and Manufacturing Volue 26, uber 2, June 2016, Page 13 CADDM 3D reconstruction of coplex curved objects fro line drawings Sun Yanling, Dong Lijun Institute of Mechanical
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Mirror Localization for a Catadioptric Imaging System by Projecting Parallel Lights
 2007 IEEE International Conference on Robotics and Autoation Roa, Italy, 10-14 April 2007 FrC2.5 Mirror Localization for a Catadioptric Iaging Syste by Projecting Parallel Lights Ryusuke Sagawa, Nobuya
2007 IEEE International Conference on Robotics and Autoation Roa, Italy, 10-14 April 2007 FrC2.5 Mirror Localization for a Catadioptric Iaging Syste by Projecting Parallel Lights Ryusuke Sagawa, Nobuya
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
EECS 4330/7330 Introduction to Mechatronics and Robotic Vision, Fall Lab 1. Camera Calibration
 1 Lab 1 Camera Calibration Objective In this experiment, students will use stereo cameras, an image acquisition program and camera calibration algorithms to achieve the following goals: 1. Develop a procedure
1 Lab 1 Camera Calibration Objective In this experiment, students will use stereo cameras, an image acquisition program and camera calibration algorithms to achieve the following goals: 1. Develop a procedure
Cameras and Stereo CSE 455. Linda Shapiro
 Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Camera models and calibration
 Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
TensorFlow and Keras-based Convolutional Neural Network in CAT Image Recognition Ang LI 1,*, Yi-xiang LI 2 and Xue-hui LI 3
 2017 2nd International Conference on Coputational Modeling, Siulation and Applied Matheatics (CMSAM 2017) ISBN: 978-1-60595-499-8 TensorFlow and Keras-based Convolutional Neural Network in CAT Iage Recognition
2017 2nd International Conference on Coputational Modeling, Siulation and Applied Matheatics (CMSAM 2017) ISBN: 978-1-60595-499-8 TensorFlow and Keras-based Convolutional Neural Network in CAT Iage Recognition
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Lecture 5.3 Camera calibration. Thomas Opsahl
 Lecture 5.3 Camera calibration Thomas Opsahl Introduction The image u u x X W v C z C World frame x C y C z C = 1 For finite projective cameras, the correspondence between points in the world and points
Lecture 5.3 Camera calibration Thomas Opsahl Introduction The image u u x X W v C z C World frame x C y C z C = 1 For finite projective cameras, the correspondence between points in the world and points
Calibrating an Overhead Video Camera
 Calibrating an Overhead Video Camera Raul Rojas Freie Universität Berlin, Takustraße 9, 495 Berlin, Germany http://www.fu-fighters.de Abstract. In this section we discuss how to calibrate an overhead video
Calibrating an Overhead Video Camera Raul Rojas Freie Universität Berlin, Takustraße 9, 495 Berlin, Germany http://www.fu-fighters.de Abstract. In this section we discuss how to calibrate an overhead video
Clustering. Cluster Analysis of Microarray Data. Microarray Data for Clustering. Data for Clustering
 Clustering Cluster Analysis of Microarray Data 4/3/009 Copyright 009 Dan Nettleton Group obects that are siilar to one another together in a cluster. Separate obects that are dissiilar fro each other into
Clustering Cluster Analysis of Microarray Data 4/3/009 Copyright 009 Dan Nettleton Group obects that are siilar to one another together in a cluster. Separate obects that are dissiilar fro each other into
EE 364B Convex Optimization An ADMM Solution to the Sparse Coding Problem. Sonia Bhaskar, Will Zou Final Project Spring 2011
 EE 364B Convex Optiization An ADMM Solution to the Sparse Coding Proble Sonia Bhaskar, Will Zou Final Project Spring 20 I. INTRODUCTION For our project, we apply the ethod of the alternating direction
EE 364B Convex Optiization An ADMM Solution to the Sparse Coding Proble Sonia Bhaskar, Will Zou Final Project Spring 20 I. INTRODUCTION For our project, we apply the ethod of the alternating direction
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
NON-RIGID OBJECT TRACKING: A PREDICTIVE VECTORIAL MODEL APPROACH
 NON-RIGID OBJECT TRACKING: A PREDICTIVE VECTORIAL MODEL APPROACH V. Atienza; J.M. Valiente and G. Andreu Departaento de Ingeniería de Sisteas, Coputadores y Autoática Universidad Politécnica de Valencia.
NON-RIGID OBJECT TRACKING: A PREDICTIVE VECTORIAL MODEL APPROACH V. Atienza; J.M. Valiente and G. Andreu Departaento de Ingeniería de Sisteas, Coputadores y Autoática Universidad Politécnica de Valencia.
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Feature Based Registration for Panoramic Image Generation
 IJCSI International Journal of Coputer Science Issues, Vol. 10, Issue 6, No, Noveber 013 www.ijcsi.org 13 Feature Based Registration for Panoraic Iage Generation Kawther Abbas Sallal 1, Abdul-Mone Saleh
IJCSI International Journal of Coputer Science Issues, Vol. 10, Issue 6, No, Noveber 013 www.ijcsi.org 13 Feature Based Registration for Panoraic Iage Generation Kawther Abbas Sallal 1, Abdul-Mone Saleh
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Preprocessing of fmri data (basic)
") Preprocessing of fmri data (basic) Practical session SPM Course 2016, Zurich Andreea Diaconescu, Maya Schneebeli, Jakob Heinzle, Lars Kasper, and Jakob Sieerkus Translational Neuroodeling Unit (TNU) Institute
Preprocessing of fmri data (basic) Practical session SPM Course 2016, Zurich Andreea Diaconescu, Maya Schneebeli, Jakob Heinzle, Lars Kasper, and Jakob Sieerkus Translational Neuroodeling Unit (TNU) Institute
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
A simplified approach to merging partial plane images
 A siplified approach to erging partial plane iages Mária Kruláková 1 This paper introduces a ethod of iage recognition based on the gradual generating and analysis of data structure consisting of the 2D
A siplified approach to erging partial plane iages Mária Kruláková 1 This paper introduces a ethod of iage recognition based on the gradual generating and analysis of data structure consisting of the 2D
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Solving the Damage Localization Problem in Structural Health Monitoring Using Techniques in Pattern Classification
 Solving the Daage Localization Proble in Structural Health Monitoring Using Techniques in Pattern Classification CS 9 Final Project Due Dec. 4, 007 Hae Young Noh, Allen Cheung, Daxia Ge Introduction Structural
Solving the Daage Localization Proble in Structural Health Monitoring Using Techniques in Pattern Classification CS 9 Final Project Due Dec. 4, 007 Hae Young Noh, Allen Cheung, Daxia Ge Introduction Structural
Robotics - Single view, Epipolar geometry, Image Features. Simone Ceriani
 Robotics - Single view, Epipolar geometry, Image Features Simone Ceriani ceriani@elet.polimi.it Dipartimento di Elettronica e Informazione Politecnico di Milano 12 April 2012 2/67 Outline 1 Pin Hole Model
Robotics - Single view, Epipolar geometry, Image Features Simone Ceriani ceriani@elet.polimi.it Dipartimento di Elettronica e Informazione Politecnico di Milano 12 April 2012 2/67 Outline 1 Pin Hole Model
Preprocessing I: Within Subject John Ashburner
 Preprocessing I: Within Subject John Ashburner Pre-processing Overview Statistics or whatever fmri tie-series Anatoical MRI Teplate Soothed Estiate Spatial Nor Motion Correct Sooth Coregister 11 21 31
Preprocessing I: Within Subject John Ashburner Pre-processing Overview Statistics or whatever fmri tie-series Anatoical MRI Teplate Soothed Estiate Spatial Nor Motion Correct Sooth Coregister 11 21 31
INTRINSIC DECOMPOSITION FOR STEREOSCOPIC IMAGES
 INTRINSIC DECOMPOSITION FOR STEREOSCOPIC IMAGES Dehua Xie 1, Shuaicheng Liu 1, Kaio Lin 2, Shuyuan Zhu 1, and Bing Zeng 1 1 School of Electronic Engineering, University of Electronic Science and Technology
INTRINSIC DECOMPOSITION FOR STEREOSCOPIC IMAGES Dehua Xie 1, Shuaicheng Liu 1, Kaio Lin 2, Shuyuan Zhu 1, and Bing Zeng 1 1 School of Electronic Engineering, University of Electronic Science and Technology
Resolution. Super-Resolution Imaging. Problem
 Resolution Super-Resolution Iaging Resolution: Sallest easurable detail in a visual presentation Subhasis Chaudhuri Departent of Electrical Engineering Indian institute of Technology Bobay Powai, Mubai-400
Resolution Super-Resolution Iaging Resolution: Sallest easurable detail in a visual presentation Subhasis Chaudhuri Departent of Electrical Engineering Indian institute of Technology Bobay Powai, Mubai-400
Ming-Wei Lee 1, Wei-Tso Lin 1, Yu-Ching Ni 2, Meei-Ling Jan 2, Yi-Chun Chen 1 * National Central University
 Rapid Constructions of Circular-Orbit Pinhole SPECT Iaging Syste Matrices by Gaussian Interpolation Method Cobined with Geoetric Paraeter Estiations (GIMGPE Ming-Wei Lee, Wei-Tso Lin, Yu-Ching Ni, Meei-Ling
Rapid Constructions of Circular-Orbit Pinhole SPECT Iaging Syste Matrices by Gaussian Interpolation Method Cobined with Geoetric Paraeter Estiations (GIMGPE Ming-Wei Lee, Wei-Tso Lin, Yu-Ching Ni, Meei-Ling
Intelligent Robotics
 64-424 Intelligent Robotics 64-424 Intelligent Robotics http://tams.informatik.uni-hamburg.de/ lectures/2013ws/vorlesung/ir Jianwei Zhang / Eugen Richter University of Hamburg Faculty of Mathematics, Informatics
64-424 Intelligent Robotics 64-424 Intelligent Robotics http://tams.informatik.uni-hamburg.de/ lectures/2013ws/vorlesung/ir Jianwei Zhang / Eugen Richter University of Hamburg Faculty of Mathematics, Informatics
A wireless sensor network for visual detection and classification of intrusions
 A wireless sensor network for visual detection and classification of intrusions ANDRZEJ SLUZEK 1,3, PALANIAPPAN ANNAMALAI 2, MD SAIFUL ISLAM 1 1 School of Coputer Engineering, 2 IntelliSys Centre Nanyang
A wireless sensor network for visual detection and classification of intrusions ANDRZEJ SLUZEK 1,3, PALANIAPPAN ANNAMALAI 2, MD SAIFUL ISLAM 1 1 School of Coputer Engineering, 2 IntelliSys Centre Nanyang
Geo-activity Recommendations by using Improved Feature Combination
 Geo-activity Recoendations by using Iproved Feature Cobination Masoud Sattari Middle East Technical University Ankara, Turkey e76326@ceng.etu.edu.tr Murat Manguoglu Middle East Technical University Ankara,
Geo-activity Recoendations by using Iproved Feature Cobination Masoud Sattari Middle East Technical University Ankara, Turkey e76326@ceng.etu.edu.tr Murat Manguoglu Middle East Technical University Ankara,
Image Processing for fmri John Ashburner. Wellcome Trust Centre for Neuroimaging, 12 Queen Square, London, UK.
 Iage Processing for fmri John Ashburner Wellcoe Trust Centre for Neuroiaging, 12 Queen Square, London, UK. Contents * Preliinaries * Rigid-Body and Affine Transforations * Optiisation and Objective Functions
Iage Processing for fmri John Ashburner Wellcoe Trust Centre for Neuroiaging, 12 Queen Square, London, UK. Contents * Preliinaries * Rigid-Body and Affine Transforations * Optiisation and Objective Functions
Depth Estimation of 2-D Magnetic Anomalous Sources by Using Euler Deconvolution Method
 Aerican Journal of Applied Sciences 1 (3): 209-214, 2004 ISSN 1546-9239 Science Publications, 2004 Depth Estiation of 2-D Magnetic Anoalous Sources by Using Euler Deconvolution Method 1,3 M.G. El Dawi,
Aerican Journal of Applied Sciences 1 (3): 209-214, 2004 ISSN 1546-9239 Science Publications, 2004 Depth Estiation of 2-D Magnetic Anoalous Sources by Using Euler Deconvolution Method 1,3 M.G. El Dawi,
Module Contact: Dr Rudy Lapeer (CMP) Copyright of the University of East Anglia Version 1
 Copyright of the University of East Anglia Version 1") UNIVERSITY OF EAST ANGLIA School of Coputing Sciences Main Series UG Exaination 2016-17 GRAPHICS 1 CMP-5010B Tie allowed: 2 hours Answer THREE questions. Notes are not peritted in this exaination Do not
UNIVERSITY OF EAST ANGLIA School of Coputing Sciences Main Series UG Exaination 2016-17 GRAPHICS 1 CMP-5010B Tie allowed: 2 hours Answer THREE questions. Notes are not peritted in this exaination Do not
More Mosaic Madness. CS194: Image Manipulation & Computational Photography. Steve Seitz and Rick Szeliski. Jeffrey Martin (jeffrey-martin.
 More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Fundamental Matrix 2 Recall the Essential Matrix Is the matrix E, that relates the image of a point
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Fundamental Matrix 2 Recall the Essential Matrix Is the matrix E, that relates the image of a point
Homework 1. An Introduction to Neural Networks
 Hoework An Introduction to Neural Networks -785: Introduction to Deep Learning Spring 09 OUT: January 4, 09 DUE: February 6, 09, :59 PM Start Here Collaboration policy: You are expected to coply with the
Hoework An Introduction to Neural Networks -785: Introduction to Deep Learning Spring 09 OUT: January 4, 09 DUE: February 6, 09, :59 PM Start Here Collaboration policy: You are expected to coply with the
Image Filter Using with Gaussian Curvature and Total Variation Model
 IJECT Vo l. 7, Is s u e 3, Ju l y - Se p t 016 ISSN : 30-7109 (Online) ISSN : 30-9543 (Print) Iage Using with Gaussian Curvature and Total Variation Model 1 Deepak Kuar Gour, Sanjay Kuar Shara 1, Dept.
IJECT Vo l. 7, Is s u e 3, Ju l y - Se p t 016 ISSN : 30-7109 (Online) ISSN : 30-9543 (Print) Iage Using with Gaussian Curvature and Total Variation Model 1 Deepak Kuar Gour, Sanjay Kuar Shara 1, Dept.
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Optimized stereo reconstruction of free-form space curves based on a nonuniform rational B-spline model
 1746 J. Opt. Soc. A. A/ Vol. 22, No. 9/ Septeber 2005 Y. J. Xiao and Y. F. Li Optiized stereo reconstruction of free-for space curves based on a nonunifor rational B-spline odel Yi Jun Xiao Departent of
1746 J. Opt. Soc. A. A/ Vol. 22, No. 9/ Septeber 2005 Y. J. Xiao and Y. F. Li Optiized stereo reconstruction of free-for space curves based on a nonunifor rational B-spline odel Yi Jun Xiao Departent of
Transformations. Prof. George Wolberg Dept. of Computer Science City College of New York
 Transforations Prof. George Wolberg Dept. of Coputer Science City College of New York Objectives Introduce standard transforations - Rotations - Translation - Scaling - Shear Derive hoogeneous coordinate
Transforations Prof. George Wolberg Dept. of Coputer Science City College of New York Objectives Introduce standard transforations - Rotations - Translation - Scaling - Shear Derive hoogeneous coordinate
The optimization design of microphone array layout for wideband noise sources
 PROCEEDINGS of the 22 nd International Congress on Acoustics Acoustic Array Systes: Paper ICA2016-903 The optiization design of icrophone array layout for wideband noise sources Pengxiao Teng (a), Jun
PROCEEDINGS of the 22 nd International Congress on Acoustics Acoustic Array Systes: Paper ICA2016-903 The optiization design of icrophone array layout for wideband noise sources Pengxiao Teng (a), Jun
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Camera calibration. Robotic vision. Ville Kyrki
 Camera calibration Robotic vision 19.1.2017 Where are we? Images, imaging Image enhancement Feature extraction and matching Image-based tracking Camera models and calibration Pose estimation Motion analysis
Camera calibration Robotic vision 19.1.2017 Where are we? Images, imaging Image enhancement Feature extraction and matching Image-based tracking Camera models and calibration Pose estimation Motion analysis
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Cassia County School District #151. Expected Performance Assessment Students will: Instructional Strategies. Performance Standards
 Unit 1 Congruence, Proof, and Constructions Doain: Congruence (CO) Essential Question: How do properties of congruence help define and prove geoetric relationships? Matheatical Practices: 1. Make sense
Unit 1 Congruence, Proof, and Constructions Doain: Congruence (CO) Essential Question: How do properties of congruence help define and prove geoetric relationships? Matheatical Practices: 1. Make sense
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
COMP 558 lecture 19 Nov. 17, 2010
 COMP 558 lecture 9 Nov. 7, 2 Camera calibration To estimate the geometry of 3D scenes, it helps to know the camera parameters, both external and internal. The problem of finding all these parameters is
COMP 558 lecture 9 Nov. 7, 2 Camera calibration To estimate the geometry of 3D scenes, it helps to know the camera parameters, both external and internal. The problem of finding all these parameters is
SYSTEMATIC CALIBRATION FOR A BACKPACKED SPHERICAL PHOTOGRAMMETRY IMAGING SYSTEM
 SYSTEMATIC CALIBRATION FOR A BACKPACKED SPHERICAL PHOTOGRAMMETRY IMAGING SYSTEM J. Y. Rau a, *, B. W. Su b, K. W. Hsiao c and J. P. Jhan d Departent of Geoatics, National Cheng Kung University, Tainan,
SYSTEMATIC CALIBRATION FOR A BACKPACKED SPHERICAL PHOTOGRAMMETRY IMAGING SYSTEM J. Y. Rau a, *, B. W. Su b, K. W. Hsiao c and J. P. Jhan d Departent of Geoatics, National Cheng Kung University, Tainan,
Brian Noguchi CS 229 (Fall 05) Project Final Writeup A Hierarchical Application of ICA-based Feature Extraction to Image Classification Brian Noguchi
 Project Final Writeup A Hierarchical Application of ICA-based Feature Extraction to Image Classification Brian Noguchi") A Hierarchical Application of ICA-based Feature Etraction to Iage Classification Introduction Iage classification poses one of the greatest challenges in the achine vision and achine learning counities.
A Hierarchical Application of ICA-based Feature Etraction to Iage Classification Introduction Iage classification poses one of the greatest challenges in the achine vision and achine learning counities.
Relief shape inheritance and graphical editor for the landscape design
 Relief shape inheritance and graphical editor for the landscape design Egor A. Yusov Vadi E. Turlapov Nizhny Novgorod State University after N. I. Lobachevsky Nizhny Novgorod Russia yusov_egor@ail.ru vadi.turlapov@cs.vk.unn.ru
Relief shape inheritance and graphical editor for the landscape design Egor A. Yusov Vadi E. Turlapov Nizhny Novgorod State University after N. I. Lobachevsky Nizhny Novgorod Russia yusov_egor@ail.ru vadi.turlapov@cs.vk.unn.ru
Mathematics in Computer Graphics and Games. Prof Emmanuel Agu. Computer Science Dept. Worcester Polytechnic Institute (WPI)
") Matheatics in Coputer Graphics and Gaes Prof Eanuel Agu Coputer Science Dept. Worcester Polytechnic Institute (WPI) About Me Professor in WPI Coputer Science Dept Grad school at Uass Aherst (MS, PhD) Research
Matheatics in Coputer Graphics and Gaes Prof Eanuel Agu Coputer Science Dept. Worcester Polytechnic Institute (WPI) About Me Professor in WPI Coputer Science Dept Grad school at Uass Aherst (MS, PhD) Research
Stereo Imaging Using a Camera with Stereoscopic Adapter
 Stereo Iaging Using a Caera with Stereoscopic Adapter Woontack Woo, agyu Ki* and Yuichi Iwadate** ATR MIC Labs, Kyoto 619-288, Japan Eail:wwoo { ngki,yiwadate } @ ic.atr.co.jp ABSTRACT In this paper, we
Stereo Iaging Using a Caera with Stereoscopic Adapter Woontack Woo, agyu Ki* and Yuichi Iwadate** ATR MIC Labs, Kyoto 619-288, Japan Eail:wwoo { ngki,yiwadate } @ ic.atr.co.jp ABSTRACT In this paper, we
Cameras and Radiometry. Last lecture in a nutshell. Conversion Euclidean -> Homogenous -> Euclidean. Affine Camera Model. Simplified Camera Models
 Cameras and Radiometry Last lecture in a nutshell CSE 252A Lecture 5 Conversion Euclidean -> Homogenous -> Euclidean In 2-D Euclidean -> Homogenous: (x, y) -> k (x,y,1) Homogenous -> Euclidean: (x, y,
Cameras and Radiometry Last lecture in a nutshell CSE 252A Lecture 5 Conversion Euclidean -> Homogenous -> Euclidean In 2-D Euclidean -> Homogenous: (x, y) -> k (x,y,1) Homogenous -> Euclidean: (x, y,
Computer Vision Projective Geometry and Calibration
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
POSITION-PATCH BASED FACE HALLUCINATION VIA LOCALITY-CONSTRAINED REPRESENTATION. Junjun Jiang, Ruimin Hu, Zhen Han, Tao Lu, and Kebin Huang
 IEEE International Conference on ultiedia and Expo POSITION-PATCH BASED FACE HALLUCINATION VIA LOCALITY-CONSTRAINED REPRESENTATION Junjun Jiang, Ruiin Hu, Zhen Han, Tao Lu, and Kebin Huang National Engineering
IEEE International Conference on ultiedia and Expo POSITION-PATCH BASED FACE HALLUCINATION VIA LOCALITY-CONSTRAINED REPRESENTATION Junjun Jiang, Ruiin Hu, Zhen Han, Tao Lu, and Kebin Huang National Engineering
CROSSOVER ANALYSIS OF CHANG E-1 LASER ALTIMETER DATA
 ISPRS Workshop on Geospatial Data Infrastructure: fro data acquisition and updating to sarter services CROSSOVER ANALYSIS OF CHANG E- LASER ALTIMETER DATA Wenin Hu, Zongyu Yue, Kaichang Di* Institute of
ISPRS Workshop on Geospatial Data Infrastructure: fro data acquisition and updating to sarter services CROSSOVER ANALYSIS OF CHANG E- LASER ALTIMETER DATA Wenin Hu, Zongyu Yue, Kaichang Di* Institute of
An Analytical Piecewise Radial Distortion Model for Precision Camera Calibration
 1 An Analytical Piecewise Radial Distortion Model for Precision Camera Calibration Lili Ma, Student Member, IEEE, YangQuan Chen and Kevin L. Moore, Senior Members, IEEE Center for Self-Organizing and Intelligent
1 An Analytical Piecewise Radial Distortion Model for Precision Camera Calibration Lili Ma, Student Member, IEEE, YangQuan Chen and Kevin L. Moore, Senior Members, IEEE Center for Self-Organizing and Intelligent
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
3D Vision Real Objects, Real Cameras. Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun,
, 12 (parts of) Computerized Image Analysis MN2 Anders Brun,") 3D Vision Real Objects, Real Cameras Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun, anders@cb.uu.se 3D Vision! Philisophy! Image formation " The pinhole camera " Projective
3D Vision Real Objects, Real Cameras Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun, anders@cb.uu.se 3D Vision! Philisophy! Image formation " The pinhole camera " Projective
Oblivious Routing for Fat-Tree Based System Area Networks with Uncertain Traffic Demands
 Oblivious Routing for Fat-Tree Based Syste Area Networks with Uncertain Traffic Deands Xin Yuan Wickus Nienaber Zhenhai Duan Departent of Coputer Science Florida State University Tallahassee, FL 3306 {xyuan,nienaber,duan}@cs.fsu.edu
Oblivious Routing for Fat-Tree Based Syste Area Networks with Uncertain Traffic Deands Xin Yuan Wickus Nienaber Zhenhai Duan Departent of Coputer Science Florida State University Tallahassee, FL 3306 {xyuan,nienaber,duan}@cs.fsu.edu
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
Novel Image Representation and Description Technique using Density Histogram of Feature Points
 Novel Iage Representation and Description Technique using Density Histogra of Feature Points Keneilwe ZUVA Departent of Coputer Science, University of Botswana, P/Bag 00704 UB, Gaborone, Botswana and Tranos
Novel Iage Representation and Description Technique using Density Histogra of Feature Points Keneilwe ZUVA Departent of Coputer Science, University of Botswana, P/Bag 00704 UB, Gaborone, Botswana and Tranos
CV: 3D to 2D mathematics. Perspective transformation; camera calibration; stereo computation; and more
 CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
An Integrated Processing Method for Multiple Large-scale Point-Clouds Captured from Different Viewpoints
 519 An Integrated Processing Method for Multiple Large-scale Point-Clouds Captured fro Different Viewpoints Yousuke Kawauchi 1, Shin Usuki, Kenjiro T. Miura 3, Hiroshi Masuda 4 and Ichiro Tanaka 5 1 Shizuoka
519 An Integrated Processing Method for Multiple Large-scale Point-Clouds Captured fro Different Viewpoints Yousuke Kawauchi 1, Shin Usuki, Kenjiro T. Miura 3, Hiroshi Masuda 4 and Ichiro Tanaka 5 1 Shizuoka
Effective Tracking of the Players and Ball in Indoor Soccer Games in the Presence of Occlusion
 Effective Tracking of the Players and Ball in Indoor Soccer Gaes in the Presence of Occlusion Soudeh Kasiri-Bidhendi and Reza Safabakhsh Airkabir Univerisity of Technology, Tehran, Iran {kasiri, safa}@aut.ac.ir
Effective Tracking of the Players and Ball in Indoor Soccer Gaes in the Presence of Occlusion Soudeh Kasiri-Bidhendi and Reza Safabakhsh Airkabir Univerisity of Technology, Tehran, Iran {kasiri, safa}@aut.ac.ir
IMAGE MOSAICKING FOR ESTIMATING THE MOTION OF AN UNDERWATER VEHICLE. Rafael García, Xevi Cufí and Lluís Pacheco
 IMAGE MOSAICKING FOR ESTIMATING THE MOTION OF AN UNDERWATER VEHICLE Rafael García, Xevi Cufí and Lluís Pacheco Coputer Vision and Robotics Group Institute of Inforatics and Applications, University of
IMAGE MOSAICKING FOR ESTIMATING THE MOTION OF AN UNDERWATER VEHICLE Rafael García, Xevi Cufí and Lluís Pacheco Coputer Vision and Robotics Group Institute of Inforatics and Applications, University of
A Directional Space-scale Based Analysis Method for Three-dimensional Profile Detection by Fringe Projection Technique
 International Journal of Optics and Applications 213, 3(5): 111-117 DOI: 1.5923/j.optics.21335.5 A Directional Space-scale Based Analysis Method for Three-diensional Profile Detection by Fringe Projection
International Journal of Optics and Applications 213, 3(5): 111-117 DOI: 1.5923/j.optics.21335.5 A Directional Space-scale Based Analysis Method for Three-diensional Profile Detection by Fringe Projection
PROBABILISTIC LOCALIZATION AND MAPPING OF MOBILE ROBOTS IN INDOOR ENVIRONMENTS WITH A SINGLE LASER RANGE FINDER
 nd International Congress of Mechanical Engineering (COBEM 3) Noveber 3-7, 3, Ribeirão Preto, SP, Brazil Copyright 3 by ABCM PROBABILISTIC LOCALIZATION AND MAPPING OF MOBILE ROBOTS IN INDOOR ENVIRONMENTS
nd International Congress of Mechanical Engineering (COBEM 3) Noveber 3-7, 3, Ribeirão Preto, SP, Brazil Copyright 3 by ABCM PROBABILISTIC LOCALIZATION AND MAPPING OF MOBILE ROBOTS IN INDOOR ENVIRONMENTS
Computer Vision. Coordinates. Prof. Flávio Cardeal DECOM / CEFET- MG.
 Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision: Lecture 3
 Computer Vision: Lecture 3 Carl Olsson 2019-01-29 Carl Olsson Computer Vision: Lecture 3 2019-01-29 1 / 28 Todays Lecture Camera Calibration The inner parameters - K. Projective vs. Euclidean Reconstruction.
Computer Vision: Lecture 3 Carl Olsson 2019-01-29 Carl Olsson Computer Vision: Lecture 3 2019-01-29 1 / 28 Todays Lecture Camera Calibration The inner parameters - K. Projective vs. Euclidean Reconstruction.
Modeling Parallel Applications Performance on Heterogeneous Systems
 Modeling Parallel Applications Perforance on Heterogeneous Systes Jaeela Al-Jaroodi, Nader Mohaed, Hong Jiang and David Swanson Departent of Coputer Science and Engineering University of Nebraska Lincoln
Modeling Parallel Applications Perforance on Heterogeneous Systes Jaeela Al-Jaroodi, Nader Mohaed, Hong Jiang and David Swanson Departent of Coputer Science and Engineering University of Nebraska Lincoln
Medical Biophysics 302E/335G/ st1-07 page 1
 Medical Biophysics 302E/335G/500 20070109 st1-07 page 1 STEREOLOGICAL METHODS - CONCEPTS Upon copletion of this lesson, the student should be able to: -define the ter stereology -distinguish between quantitative
Medical Biophysics 302E/335G/500 20070109 st1-07 page 1 STEREOLOGICAL METHODS - CONCEPTS Upon copletion of this lesson, the student should be able to: -define the ter stereology -distinguish between quantitative
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Evaluation of a multi-frame blind deconvolution algorithm using Cramér-Rao bounds
 Evaluation of a ulti-frae blind deconvolution algorith using Craér-Rao bounds Charles C. Beckner, Jr. Air Force Research Laboratory, 3550 Aberdeen Ave SE, Kirtland AFB, New Mexico, USA 87117-5776 Charles
Evaluation of a ulti-frae blind deconvolution algorith using Craér-Rao bounds Charles C. Beckner, Jr. Air Force Research Laboratory, 3550 Aberdeen Ave SE, Kirtland AFB, New Mexico, USA 87117-5776 Charles
3D Building Detection and Reconstruction from Aerial Images Using Perceptual Organization and Fast Graph Search
 436 Journal of Electrical Engineering & Technology, Vol. 3, No. 3, pp. 436~443, 008 3D Building Detection and Reconstruction fro Aerial Iages Using Perceptual Organization and Fast Graph Search Dong-Min
436 Journal of Electrical Engineering & Technology, Vol. 3, No. 3, pp. 436~443, 008 3D Building Detection and Reconstruction fro Aerial Iages Using Perceptual Organization and Fast Graph Search Dong-Min
ELEN : Project Progress Report. Second Order Delay Computation for RC networks with Non-Tree Topology
 ELEN 689-603: Project Progress eport Second Order Delay Coputation for C networks wi Non-Tree Topology ajeshwary Tayade 000 07 573 //003 PDF created wi pdffactory trial version www.pdffactory.co : Introduction
ELEN 689-603: Project Progress eport Second Order Delay Coputation for C networks wi Non-Tree Topology ajeshwary Tayade 000 07 573 //003 PDF created wi pdffactory trial version www.pdffactory.co : Introduction
A Scale Stretch Method Based on ICP for 3D Data Registration
 IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING, VOL. 6, NO. 3, JULY 2009 559 solutions since they correspond to an objective function with an even saller value, i.e., z(r1; r2) = 010. Nevertheless,
IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING, VOL. 6, NO. 3, JULY 2009 559 solutions since they correspond to an objective function with an even saller value, i.e., z(r1; r2) = 010. Nevertheless,
Least-squares approximation of affine mappings for sweep mesh generation. Functional analysis and applications
 Least-squares approxiation of affine appings for sweep esh generation. Functional analysis and applications evi Roca Josep Sarrate Abstract Sweep ethods are one of the ost robust techniques to generate
Least-squares approxiation of affine appings for sweep esh generation. Functional analysis and applications evi Roca Josep Sarrate Abstract Sweep ethods are one of the ost robust techniques to generate
Perception II: Pinhole camera and Stereo Vision
 Perception II: Pinhole camera and Stereo Vision Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Mobile Robot Control Scheme knowledge, data base mission commands Localization
Perception II: Pinhole camera and Stereo Vision Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Mobile Robot Control Scheme knowledge, data base mission commands Localization
Camera model and calibration
 and calibration AVIO tristan.moreau@univ-rennes1.fr Laboratoire de Traitement du Signal et des Images (LTSI) Université de Rennes 1. Mardi 21 janvier 1 AVIO tristan.moreau@univ-rennes1.fr and calibration
and calibration AVIO tristan.moreau@univ-rennes1.fr Laboratoire de Traitement du Signal et des Images (LTSI) Université de Rennes 1. Mardi 21 janvier 1 AVIO tristan.moreau@univ-rennes1.fr and calibration