Scalable geometric calibration for multi-view camera arrays
|
|
|
- Stephen Ramsey
- 6 years ago
- Views:
Transcription

1 Scalable geometric calibration for multi-view camera arrays Bernhard Blaschitz, Doris Antensteiner, Svorad Štolc AIT Austrian Institute of Technology GmbH Intelligent Vision Systems Vienna, Austria

2 Motivation Inline Multi-line scan calibration toolbox 2

3 Overview Introduction Calibration, Rectifiction AIT Calibration Toolbox Camera Array Applications




4 3D Stereo Calibration Calibration: know the positions, rotations, focal lengths, distortions of all cameras
5 3D Stereo Rectification Motivation: corresponding points along line parallel to coordinate system In order to estimate depths more easily



6 Multiview Stereo for depths estimation Hartley, Richard, and Andrew Zisserman. Multiple view geometry in computer vision. Cambridge university press, 2003.




7 Rectification through reprojection Images in original image planes Original planes view from front Images reprojected to common plane Top view of rectified images c.f. to the standard case in Klette, Reinhard. Concise computer vision. Springer, London,
8 AIT calibration toolbox We developed an toolbox that can turn any multi-view camera array into a multiview stereo camera system, resp. into a light field camera, which is well suited for capturing depth information. The toolbox allows for determination of all intrinsic (focal lengths, principal points, distortions) and extrinsic (positions and rotations of cameras w.r.t. each other and w.r.t. the input checkerboard patterns) camera parameters, which enables us to undistort and rectify the images. 8
9 AIT calibration toolbox The software has been realized in Matlab, images provided through standard interfaces. The calibration itself depends on the Complete Camera Calibration Toolbox for Matlab by Jean-Yves Bouguet, see and uses some routines of the [OpenCV] Toolbox, 9
10 Camera calibration model David Claus, Andrew W. Fitzgibbon: A Rational Function Lens Distortion Model for General Cameras. CVPR (1) 2005: Intrinsic camera model has 12 degrees of freedom 2 focal lengths f x, f y 2 principal point coordinates c x, c y 6 radial distortion parameters k 1, k 2, k 3, k 4, k 5, k 6 2 tangential distortion coefficients p 1, p 2

11 Details of the implementation Our contribution Use of the improved calibration target by ICG of TU Graz Ferstl, D., Reinbacher, C., Riegler, G., Rüther, M., & Bischof, H. Learning Depth Calibration of Time-of-Flight Cameras. A true multi view calibration instead of a pairwise stereo calibration, which means bundle adjustment through optimization. Cf. Bundle adjustment gone public by Manolis I.A. Lourakis at PRCV 2012, see lourakis/sba/ Row-wise resp. column-wise epipolar images rectification, which allows for an exact depth measurement for a multiview image (not only stereo). 11
12 Details of the implementation Bundle Adjustment Is a non-linear method for refinining extrinsic and intrinsics camera parameters, as well as the structure of the scene Means minimizing the reprojection error» E(P,X) = Σ i Σ j dist(x ij, P i X j ) 2 C.f. Fergus, Rob., Computer Vision Spring 2014, fergus/teaching/vision/ 12

13 Applications of our toolbox Camera array For all camera-related questions, please refer to 13
14 Applications of our toolbox Camera array with pattern positions 14
15 Output of the calibration Camera Positions cam01 cam02 cam03 cam04 cam05 cam06 cam07 cam08 cam09 cam10 cam11 cam12 cam13 cam14 cam15 cam16 22,172 22,363 22,144 22,125-0, ,159 0,149-22,873-22,586-22,415-22,06-44,85-44,824-44,723-45,386 22,171 0,235-21,542-43,62 21, ,778-43,761 22,022-0,142-21,961-43,964 22,094-0,003-22,069-43,516 0,329-0,772-0,104-0,173 0, ,009-0,113-0,773-0,286 0,357 1,213-0,61 0,593 0,99 1,197 15




16 Output of the calibration Reprojection Errors Reprojection before optimization Reprojection after optimization After optimization, the average reprojection error across all images is ± pixels. 16





17 Xapt Example for 3D Reconstruction Original Images Rectified Images A. Shekhovtsov, Ch. Reinbacher, G. Graber and Th. Pock. "Solving Dense Image Matching in Real- Time using Discrete-Continuous Optimization." 21st Computer Vision Winter Workshop, Depth map


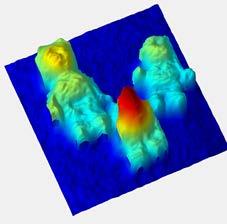

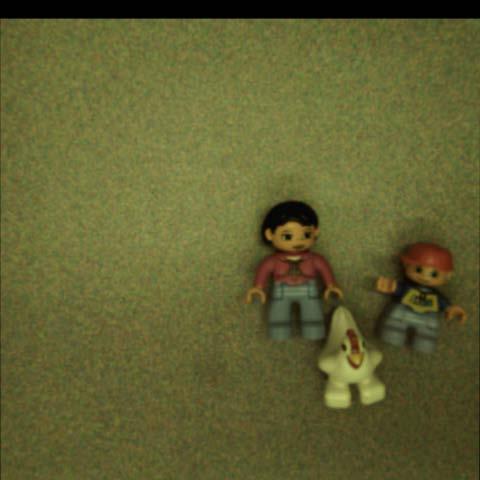
18 Xapt Example for 3D Reconstruction Original Images Rectified Images 18 Depth map


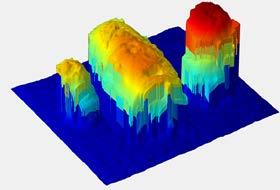


19 Xapt Example for 3D Reconstruction Original Images Rectified Images 19 Depth map


20 Summary AIT Calibration Toolbox turns any multi-view camera array into a light field camera. has been realized in Matlab, only dependencies to free libraries. uses non-linear optimization to minimize reprojection error. allows for an exact depth measurement for a multiview image through epipolar images rectification. 20
21 AIT Austrian Institute of Technology your ingenious partner Bernhard Blaschitz, Doris Antensteiner, Svorad Štolc AIT Austrian Institute of Technology GmbH Intelligent Vision Systems Vienna, Austria
AIT Inline Computational Imaging: Geometric calibration and image rectification
 AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection
 Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
CSCI 5980: Assignment #3 Homography
 Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Stereo Image Rectification for Simple Panoramic Image Generation
 Stereo Image Rectification for Simple Panoramic Image Generation Yun-Suk Kang and Yo-Sung Ho Gwangju Institute of Science and Technology (GIST) 261 Cheomdan-gwagiro, Buk-gu, Gwangju 500-712 Korea Email:{yunsuk,
Stereo Image Rectification for Simple Panoramic Image Generation Yun-Suk Kang and Yo-Sung Ho Gwangju Institute of Science and Technology (GIST) 261 Cheomdan-gwagiro, Buk-gu, Gwangju 500-712 Korea Email:{yunsuk,
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Comments on Consistent Depth Maps Recovery from a Video Sequence
 Comments on Consistent Depth Maps Recovery from a Video Sequence N.P. van der Aa D.S. Grootendorst B.F. Böggemann R.T. Tan Technical Report UU-CS-2011-014 May 2011 Department of Information and Computing
Comments on Consistent Depth Maps Recovery from a Video Sequence N.P. van der Aa D.S. Grootendorst B.F. Böggemann R.T. Tan Technical Report UU-CS-2011-014 May 2011 Department of Information and Computing
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras
 Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inria.fr http://perception.inrialpes.fr/ Outline The geometry of active stereo.
Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inria.fr http://perception.inrialpes.fr/ Outline The geometry of active stereo.
arxiv: v1 [cs.cv] 19 Sep 2017
![arxiv: v1 [cs.cv] 19 Sep 2017](/thumbs/82/85087752.jpg "arxiv: v1 [cs.cv] 19 Sep 2017") 3D Reconstruction with Low Resolution, Small Baseline and High Radial Distortion Stereo Images arxiv:709.0645v [cs.cv] 9 Sep 207 Tiago Dias and Helder Araujo : Pedro Miraldo Institute of Systems and Robotics,
3D Reconstruction with Low Resolution, Small Baseline and High Radial Distortion Stereo Images arxiv:709.0645v [cs.cv] 9 Sep 207 Tiago Dias and Helder Araujo : Pedro Miraldo Institute of Systems and Robotics,
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION
 CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
Camera calibration. Robotic vision. Ville Kyrki
 Camera calibration Robotic vision 19.1.2017 Where are we? Images, imaging Image enhancement Feature extraction and matching Image-based tracking Camera models and calibration Pose estimation Motion analysis
Camera calibration Robotic vision 19.1.2017 Where are we? Images, imaging Image enhancement Feature extraction and matching Image-based tracking Camera models and calibration Pose estimation Motion analysis
Computer Vision I. Dense Stereo Correspondences. Anita Sellent 1/15/16
 Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
EECS 442: Final Project
 EECS 442: Final Project Structure From Motion Kevin Choi Robotics Ismail El Houcheimi Robotics Yih-Jye Jeffrey Hsu Robotics Abstract In this paper, we summarize the method, and results of our projective
EECS 442: Final Project Structure From Motion Kevin Choi Robotics Ismail El Houcheimi Robotics Yih-Jye Jeffrey Hsu Robotics Abstract In this paper, we summarize the method, and results of our projective
A virtual tour of free viewpoint rendering
 A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
Structure from Motion and Multi- view Geometry. Last lecture
 Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Pattern Feature Detection for Camera Calibration Using Circular Sample
 Pattern Feature Detection for Camera Calibration Using Circular Sample Dong-Won Shin and Yo-Sung Ho (&) Gwangju Institute of Science and Technology (GIST), 13 Cheomdan-gwagiro, Buk-gu, Gwangju 500-71,
Pattern Feature Detection for Camera Calibration Using Circular Sample Dong-Won Shin and Yo-Sung Ho (&) Gwangju Institute of Science and Technology (GIST), 13 Cheomdan-gwagiro, Buk-gu, Gwangju 500-71,
Reminder: Lecture 20: The Eight-Point Algorithm. Essential/Fundamental Matrix. E/F Matrix Summary. Computing F. Computing F from Point Matches
 Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe : Martin Stiaszny and Dana Qu LECTURE 0 Camera Calibration 0.. Introduction Just like the mythical frictionless plane, in real life we will
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe : Martin Stiaszny and Dana Qu LECTURE 0 Camera Calibration 0.. Introduction Just like the mythical frictionless plane, in real life we will
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Robot Vision: Camera calibration
 Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
3D Sensing and Reconstruction Readings: Ch 12: , Ch 13: ,
 3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
Yihao Qian Team A: Aware Teammates: Amit Agarwal Harry Golash Menghan Zhang Zihao (Theo) Zhang ILR07 February.16, 2016
 Zhang ILR07 February.16, 2016") Yihao Qian Team A: Aware Teammates: Amit Agarwal Harry Golash Menghan Zhang Zihao (Theo) Zhang ILR07 February.16, 2016 Individual Progress During the last week, I was in charge of transplanting stereo
Yihao Qian Team A: Aware Teammates: Amit Agarwal Harry Golash Menghan Zhang Zihao (Theo) Zhang ILR07 February.16, 2016 Individual Progress During the last week, I was in charge of transplanting stereo
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/91/106305353.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Introduction to 3D Machine Vision
 Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Camera Drones Lecture 3 3D data generation
 Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Camera calibration for miniature, low-cost, wide-angle imaging systems
 Camera calibration for miniature, low-cost, wide-angle imaging systems Oliver Frank, Roman Katz, Christel-Loic Tisse and Hugh Durrant-Whyte ARC Centre of Excellence for Autonomous Systems University of
Camera calibration for miniature, low-cost, wide-angle imaging systems Oliver Frank, Roman Katz, Christel-Loic Tisse and Hugh Durrant-Whyte ARC Centre of Excellence for Autonomous Systems University of
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Simultaneous Geometric and Colorimetric Camera Calibration
 Simultaneous Geometric and Colorimetric Camera Calibration Daniel Kapusi 1, Philipp Prinke 1, Rainer Jahn 1, Darko Vehar 2, Rico Nestler 12 and K.-H. Franke 2 1 Zentrum für Bild- und Signalverarbeitung
Simultaneous Geometric and Colorimetric Camera Calibration Daniel Kapusi 1, Philipp Prinke 1, Rainer Jahn 1, Darko Vehar 2, Rico Nestler 12 and K.-H. Franke 2 1 Zentrum für Bild- und Signalverarbeitung
Compositing a bird's eye view mosaic
 Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Augmented Reality II - Camera Calibration - Gudrun Klinker May 11, 2004
 Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
Augmented Reality II - Camera Calibration - Gudrun Klinker May, 24 Literature Richard Hartley and Andrew Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press, 2. (Section 5,
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera
 Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera Michael P. Cutter University of California at Santa Cruz Baskin School of Engineering (Computer Engineering department) Santa Cruz,
Capture and Dewarping of Page Spreads with a Handheld Compact 3D Camera Michael P. Cutter University of California at Santa Cruz Baskin School of Engineering (Computer Engineering department) Santa Cruz,
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book)
") Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book) Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Credits: M. Shah, UCF CAP5415, lecture 23 http://www.cs.ucf.edu/courses/cap6411/cap5415/,
Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book) Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Credits: M. Shah, UCF CAP5415, lecture 23 http://www.cs.ucf.edu/courses/cap6411/cap5415/,
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Efficient Stereo Image Rectification Method Using Horizontal Baseline
 Efficient Stereo Image Rectification Method Using Horizontal Baseline Yun-Suk Kang and Yo-Sung Ho School of Information and Communicatitions Gwangju Institute of Science and Technology (GIST) 261 Cheomdan-gwagiro,
Efficient Stereo Image Rectification Method Using Horizontal Baseline Yun-Suk Kang and Yo-Sung Ho School of Information and Communicatitions Gwangju Institute of Science and Technology (GIST) 261 Cheomdan-gwagiro,
Computer Vision. Coordinates. Prof. Flávio Cardeal DECOM / CEFET- MG.
 Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Project Title: Welding Machine Monitoring System Phase II. Name of PI: Prof. Kenneth K.M. LAM (EIE) Progress / Achievement: (with photos, if any)
 Progress / Achievement: (with photos, if any)") Address: Hong Kong Polytechnic University, Phase 8, Hung Hom, Kowloon, Hong Kong. Telephone: (852) 3400 8441 Email: cnerc.steel@polyu.edu.hk Website: https://www.polyu.edu.hk/cnerc-steel/ Project Title:
Address: Hong Kong Polytechnic University, Phase 8, Hung Hom, Kowloon, Hong Kong. Telephone: (852) 3400 8441 Email: cnerc.steel@polyu.edu.hk Website: https://www.polyu.edu.hk/cnerc-steel/ Project Title:
Assignment 2: Stereo and 3D Reconstruction from Disparity
 CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
CSCI 5980/8980: Assignment #4. Fundamental Matrix
 Submission CSCI 598/898: Assignment #4 Assignment due: March 23 Individual assignment. Write-up submission format: a single PDF up to 5 pages (more than 5 page assignment will be automatically returned.).
Submission CSCI 598/898: Assignment #4 Assignment due: March 23 Individual assignment. Write-up submission format: a single PDF up to 5 pages (more than 5 page assignment will be automatically returned.).
Calibration of a Different Field-of-view Stereo Camera System using an Embedded Checkerboard Pattern
 Calibration of a Different Field-of-view Stereo Camera System using an Embedded Checkerboard Pattern Pathum Rathnayaka, Seung-Hae Baek and Soon-Yong Park School of Computer Science and Engineering, Kyungpook
Calibration of a Different Field-of-view Stereo Camera System using an Embedded Checkerboard Pattern Pathum Rathnayaka, Seung-Hae Baek and Soon-Yong Park School of Computer Science and Engineering, Kyungpook
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
Rectification. Dr. Gerhard Roth
 Rectification Dr. Gerhard Roth Problem Definition Given a pair of stereo images, the intrinsic parameters of each camera, and the extrinsic parameters of the system, R, and, compute the image transformation
Rectification Dr. Gerhard Roth Problem Definition Given a pair of stereo images, the intrinsic parameters of each camera, and the extrinsic parameters of the system, R, and, compute the image transformation
ADS40 Calibration & Verification Process. Udo Tempelmann*, Ludger Hinsken**, Utz Recke*
 ADS40 Calibration & Verification Process Udo Tempelmann*, Ludger Hinsken**, Utz Recke* *Leica Geosystems GIS & Mapping GmbH, Switzerland **Ludger Hinsken, Author of ORIMA, Konstanz, Germany Keywords: ADS40,
ADS40 Calibration & Verification Process Udo Tempelmann*, Ludger Hinsken**, Utz Recke* *Leica Geosystems GIS & Mapping GmbH, Switzerland **Ludger Hinsken, Author of ORIMA, Konstanz, Germany Keywords: ADS40,
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows
 ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
Geometry of image formation
 eometry of image formation Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 3, 2008 Talk Outline
eometry of image formation Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 3, 2008 Talk Outline
Announcements. Stereo
 Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Scene Reconstruction from Uncontrolled Motion using a Low Cost 3D Sensor
 Scene Reconstruction from Uncontrolled Motion using a Low Cost 3D Sensor Pierre Joubert and Willie Brink Applied Mathematics Department of Mathematical Sciences University of Stellenbosch, South Africa
Scene Reconstruction from Uncontrolled Motion using a Low Cost 3D Sensor Pierre Joubert and Willie Brink Applied Mathematics Department of Mathematical Sciences University of Stellenbosch, South Africa
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
C18 Computer Vision. Lecture 1 Introduction: imaging geometry, camera calibration. Victor Adrian Prisacariu.
 C8 Computer Vision Lecture Introduction: imaging geometry, camera calibration Victor Adrian Prisacariu http://www.robots.ox.ac.uk/~victor InfiniTAM Demo Course Content VP: Intro, basic image features,
C8 Computer Vision Lecture Introduction: imaging geometry, camera calibration Victor Adrian Prisacariu http://www.robots.ox.ac.uk/~victor InfiniTAM Demo Course Content VP: Intro, basic image features,
An Overview of Matchmoving using Structure from Motion Methods
 An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
An Overview of Matchmoving using Structure from Motion Methods Kamyar Haji Allahverdi Pour Department of Computer Engineering Sharif University of Technology Tehran, Iran Email: allahverdi@ce.sharif.edu
Efficient Cost Volume Sampling for Plane Sweeping Based Multiview Depth Estimation
 Tampere University of Technology Efficient Cost Volume Sampling for Plane Sweeping Based Multiview Depth Estimation Citation Suominen, O., & Gotchev, A. (5). Efficient Cost Volume Sampling for Plane Sweeping
Tampere University of Technology Efficient Cost Volume Sampling for Plane Sweeping Based Multiview Depth Estimation Citation Suominen, O., & Gotchev, A. (5). Efficient Cost Volume Sampling for Plane Sweeping
EXPERIMENTAL RESULTS ON THE DETERMINATION OF THE TRIFOCAL TENSOR USING NEARLY COPLANAR POINT CORRESPONDENCES
 EXPERIMENTAL RESULTS ON THE DETERMINATION OF THE TRIFOCAL TENSOR USING NEARLY COPLANAR POINT CORRESPONDENCES Camillo RESSL Institute of Photogrammetry and Remote Sensing University of Technology, Vienna,
EXPERIMENTAL RESULTS ON THE DETERMINATION OF THE TRIFOCAL TENSOR USING NEARLY COPLANAR POINT CORRESPONDENCES Camillo RESSL Institute of Photogrammetry and Remote Sensing University of Technology, Vienna,
Multiple View Geometry in Computer Vision Second Edition
 Multiple View Geometry in Computer Vision Second Edition Richard Hartley Australian National University, Canberra, Australia Andrew Zisserman University of Oxford, UK CAMBRIDGE UNIVERSITY PRESS Contents
Multiple View Geometry in Computer Vision Second Edition Richard Hartley Australian National University, Canberra, Australia Andrew Zisserman University of Oxford, UK CAMBRIDGE UNIVERSITY PRESS Contents
Vision-based endoscope tracking for 3D ultrasound image-guided surgical navigation [Yang et al. 2014, Comp Med Imaging and Graphics]
![Vision-based endoscope tracking for 3D ultrasound image-guided surgical navigation [Yang et al. 2014, Comp Med Imaging and Graphics]](/thumbs/85/91497264.jpg "Vision-based endoscope tracking for 3D ultrasound image-guided surgical navigation [Yang et al. 2014, Comp Med Imaging and Graphics]") Vision-based endoscope tracking for 3D ultrasound image-guided surgical navigation [Yang et al. 2014, Comp Med Imaging and Graphics] Gustavo Sato dos Santos IGI Journal Club 23.10.2014 Motivation Goal:
Vision-based endoscope tracking for 3D ultrasound image-guided surgical navigation [Yang et al. 2014, Comp Med Imaging and Graphics] Gustavo Sato dos Santos IGI Journal Club 23.10.2014 Motivation Goal:
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Hartley - Zisserman reading club. Part I: Hartley and Zisserman Appendix 6: Part II: Zhengyou Zhang: Presented by Daniel Fontijne
 Hartley - Zisserman reading club Part I: Hartley and Zisserman Appendix 6: Iterative estimation methods Part II: Zhengyou Zhang: A Flexible New Technique for Camera Calibration Presented by Daniel Fontijne
Hartley - Zisserman reading club Part I: Hartley and Zisserman Appendix 6: Iterative estimation methods Part II: Zhengyou Zhang: A Flexible New Technique for Camera Calibration Presented by Daniel Fontijne
Lecture 14: Basic Multi-View Geometry
 Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Instance-level recognition I. - Camera geometry and image alignment
 Reconnaissance d objets et vision artificielle 2011 Instance-level recognition I. - Camera geometry and image alignment Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire
Reconnaissance d objets et vision artificielle 2011 Instance-level recognition I. - Camera geometry and image alignment Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
GOPRO CAMERAS MATRIX AND DEPTH MAP IN COMPUTER VISION
 Tutors : Mr. Yannick Berthoumieu Mrs. Mireille El Gheche GOPRO CAMERAS MATRIX AND DEPTH MAP IN COMPUTER VISION Delmi Elias Kangou Ngoma Joseph Le Goff Baptiste Naji Mohammed Hamza Maamri Kenza Randriamanga
Tutors : Mr. Yannick Berthoumieu Mrs. Mireille El Gheche GOPRO CAMERAS MATRIX AND DEPTH MAP IN COMPUTER VISION Delmi Elias Kangou Ngoma Joseph Le Goff Baptiste Naji Mohammed Hamza Maamri Kenza Randriamanga
Simple, Accurate, and Robust Projector-Camera Calibration. Supplementary material
 Simple, Accurate, and Robust Projector-Camera Calibration Daniel Moreno Gabriel Taubin Brown University Providence RI, USA {daniel moreno,taubin}@brown.edu 1. Introduction Supplementary material In addition
Simple, Accurate, and Robust Projector-Camera Calibration Daniel Moreno Gabriel Taubin Brown University Providence RI, USA {daniel moreno,taubin}@brown.edu 1. Introduction Supplementary material In addition
WIDE-AREA EXTERNAL MULTI-CAMERA CALIBRATION USING VISION GRAPHS AND VIRTUAL CALIBRATION OBJECT. Gregorij Kurillo, Zeyu Li, Ruzena Bajcsy
 WIDE-AREA EXTERNAL MULTI-CAMERA CALIBRATION USING VISION GRAPHS AND VIRTUAL CALIBRATION OBJECT Gregorij Kurillo, Zeyu Li, Ruzena Bajcsy University of California, Berkeley ABSTRACT In this paper we address
WIDE-AREA EXTERNAL MULTI-CAMERA CALIBRATION USING VISION GRAPHS AND VIRTUAL CALIBRATION OBJECT Gregorij Kurillo, Zeyu Li, Ruzena Bajcsy University of California, Berkeley ABSTRACT In this paper we address
INDOOR PTZ CAMERA CALIBRATION WITH CONCURRENT PT AXES
 INDOOR PTZ CAMERA CALIBRATION WITH CONCURRENT PT AXES Jordi Sanchez-Riera, Jordi Salvador, Josep R. Casas Image Processing Group, UPC Technical University of Catalonia Jordi Girona 1-3, edifici D5, 08034
INDOOR PTZ CAMERA CALIBRATION WITH CONCURRENT PT AXES Jordi Sanchez-Riera, Jordi Salvador, Josep R. Casas Image Processing Group, UPC Technical University of Catalonia Jordi Girona 1-3, edifici D5, 08034
Announcements. Stereo
 Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Stereo matching. Francesco Isgrò. 3D Reconstruction and Stereo p.1/21
 Stereo matching Francesco Isgrò 3D Reconstruction and Stereo p.1/21 Structure of a stereo vision system Extract interesting point from each image Determine a set of matching points Compute the fundamental
Stereo matching Francesco Isgrò 3D Reconstruction and Stereo p.1/21 Structure of a stereo vision system Extract interesting point from each image Determine a set of matching points Compute the fundamental
Computer Vision I. Announcement. Stereo Vision Outline. Stereo II. CSE252A Lecture 15
 Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Reconstructing Reflective and Transparent Surfaces from Epipolar Plane Images
 Sven Wanner and Bastian Goldlücke Heidelberg Collaboratory for Image Processing 1. Light Fields and Epipolar Plane Images 1. Light Fields and Epipolar Plane Images Light Fields as a dense sampling of a
Sven Wanner and Bastian Goldlücke Heidelberg Collaboratory for Image Processing 1. Light Fields and Epipolar Plane Images 1. Light Fields and Epipolar Plane Images Light Fields as a dense sampling of a
Conversion of 2D Image into 3D and Face Recognition Based Attendance System
 Conversion of 2D Image into 3D and Face Recognition Based Attendance System Warsha Kandlikar, Toradmal Savita Laxman, Deshmukh Sonali Jagannath Scientist C, Electronics Design and Technology, NIELIT Aurangabad,
Conversion of 2D Image into 3D and Face Recognition Based Attendance System Warsha Kandlikar, Toradmal Savita Laxman, Deshmukh Sonali Jagannath Scientist C, Electronics Design and Technology, NIELIT Aurangabad,
CV: 3D to 2D mathematics. Perspective transformation; camera calibration; stereo computation; and more
 CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Stereo Vision Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Stereo Vision 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University What s different between these two images? Objects that are close move more or less? The amount of horizontal movement is
Stereo Vision 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University What s different between these two images? Objects that are close move more or less? The amount of horizontal movement is
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Camera Calibration for a Robust Omni-directional Photogrammetry System
 Camera Calibration for a Robust Omni-directional Photogrammetry System Fuad Khan 1, Michael Chapman 2, Jonathan Li 3 1 Immersive Media Corporation Calgary, Alberta, Canada 2 Ryerson University Toronto,
Camera Calibration for a Robust Omni-directional Photogrammetry System Fuad Khan 1, Michael Chapman 2, Jonathan Li 3 1 Immersive Media Corporation Calgary, Alberta, Canada 2 Ryerson University Toronto,